第11章 串行通信接口
第 11 章 串行通信及接口电路PPT课件

23
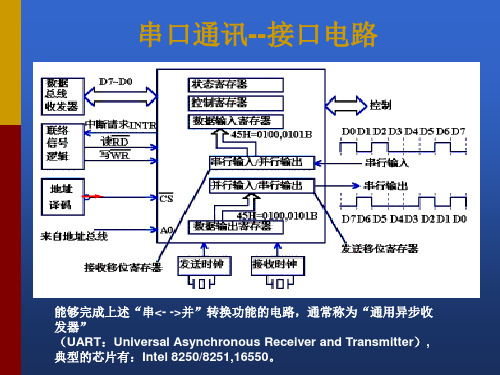
三、8251的接口信号
8251可用来作为CPU与外设或调制解 调器之间的接口。其接口信号可以分为 两组:一组为与CPU接口的信号;另一组 为与外设(或调制器)接口的信号。
24
图:CPU通过Intel 8251与串行外设接口(P303)
16
18
串行通信的接口标准(常用的9根信号线)
1-9引脚分别为:
CD
RXD TXD DTR SG DSR RTS CTS RI
数据载波检出
当本地DCE收到对方的DCE设备送来的载波信号时,使CD有 效,通知DTE准备接收,并且由DCE将接收到的载波信号解 调为数字信号,经RXD线送给DTE。
接收数据
型
计
计
算串 机行 系接 统口
调制 解调
器
调制 解调
器
算
串
机
行
系
接
统
口
图:MODEM在远程通信的连接示意图
12
➢ 根据调制技术,一般有3种调制方法: 调频、调幅和调相。
➢ 常用调频方法:FSK(Frenquency Shift Keying)频移键控法。
➢ 课本P298
13
信号的调制和解调
在通讯中,Modem起着传输信号的作用, 是一种数据通讯设备,简称DCE(Data Communications Equipment)。
Data flow
设备B
接收器/ 发送器
图:半双工示意图
9
(3)数据传送方向(续)
②全双工(Full Duplex) 特点:能够在两个方向同时进行数据传送。
串行通信接口及总线标准
RS-4
定义
RS-485是一种改进的串行 通信接口标准,由EIA制定。
特点
采用差分信号传输方式, 具有多站能力、高抗干扰 能力和长距离传输能力。
应用
广泛应用于工业自动化、 楼宇自动化和智能家居等 领域。
SPI
定义
应用
SPI是一种同步串行通信协议,由摩托 罗拉公司制定。
常用于微控制器和外围设备之间的通 信。
感谢观看
详细描述
在工业自动化控制系统中,各种设备如传感器、执行器、控制器等需要实时地进行数据交换和通信。 串行通信接口能够提供稳定、可靠的连接,使得设备间能够高效地传输数据,实现自动化控制和监测 。这有助于提高生产效率、降低成本、减少故障发生率。
智能家居系统
总结词
串行通信接口在智能家居系统中发挥关键作用,能够实现家庭设备的互联互通,提升家居生活的便利性和舒适度。
VS
详细描述
物联网设备间需要进行大量的数据交换和 通信,以实现设备的远程监控和管理。串 行通信接口能够提供高效、可靠的数据传 输服务,使得设备间能够稳定地进行通信 。这有助于促进物联网的发展和应用,提 高设备的可维护性和可管理性,降低运营 成本。
汽车电子系统
总结词
串行通信接口在汽车电子系统中具有重要价 值,能够实现汽车各系统间的信息共享和协 同工作,提高汽车的安全性和可靠性。
数据传输速率较慢。
03
02
特点
04
数据传输距离较远。
数据传输线少,成本低。
05
06
适用于不同设备之间的通信。
串行通信接口的重要性
01
02
03
04
实现设备之间的数据交换和通 信。
简化电路设计,降低成本。
串行通信接口培训

CAN总线
总结词
CAN总线是一种用于汽车和工业控制领域的串行通信协议,具有高可靠性和实时性。
详细描述
CAN总线采用差分信号传输方式,通过双绞线进行连接,最高传输速率可达1Mbps。CAN总线支持多主设备通 信,可以实现多个设备之间的相互通信。CAN总线具有高可靠性和实时性,广泛应用于汽车发动机控制、刹车系 统、悬挂系统等关键领域。在工业控制领域,CAN总线也广泛应用于各种自动化设备和系统的通信。
详细描述
在工业控制领域,串行通信接口如RS-485、RS-232等被广泛采用,用于连接各种传感器、执 行器、控制器等设备,实现实时数据采集、监控和远程控制等功能。这些接口标准具有简单、 可靠、成本低等优点,能够满足工业控制领域对可靠性和实时性的要求。
串行通信接口在智能家居中的应用
总结词
智能家居中,串行通信接口用于实现家庭内部各种智能设备之间的互联互通。
数据编码方式
曼彻斯特编码
将数据位和时钟位合并, 通过电压跳变表示逻辑状 态。
格雷码
一种无权重的二进制编码, 每次转换只改变一位。
差分曼彻斯特编码
改进的曼彻斯特编码,通 过正负跳变表示逻辑状态。
数据校验与控制
奇偶校验
通过添加一个校验位来检 测数据中的错误。
CRC校验
通过多项式除法来检测数 据中的错误。
串行通信接口的类型
01 RS-232
一种标准的串行通信接口,常用于计算机与外部 设备之间的通信。
02 RS-485
一种双线半双工串行通信接口,具有更远的传输 距离和更好的抗干扰能力。
03 USB
通用串行总线接口,是一种常见的串行通信接口, 支持热插拔和即插即用。
串行通信接口的应用场景
串行接口教程串行通讯的概念
(2)数据发送与接收线: 发送数据(Transmitted data-TxD)——通过TxD终端将串行数据发送到MODEM,(DTE→DCE)。 接收数据(Received data-RxD)——通过RxD线终端接收从MODEM发来的串行数据,(DCE→DTE)。 (3)地线 有两根线SG、PG——信号地和保护地信号线,无方向。
奇偶校验
奇校验:所有传送的数位(含字符的各数位和校验位)中,“1”的个数为奇数,如: 1 0110,0101 0 0110,0001 偶校验:所有传送的数位(含字符的各数位和校验位)中,“1”的个数为偶数,如: 1 0100,0101 0 0100,0001
1.电气特性
EIA-RS-232C对电器特性、逻辑电平和各种信号线功能都作了规定。 在TxD和RxD上:逻辑1(MARK) =-3V~-15V 逻辑0(SPACE)=+3~+15V 在RTS、CTS、DSR、DTR和DCD等控制线上: 信号有效(接通,ON状态,正电压)=+3V~+15V 信号无效(断开,OFF状态,负电压) = -3V~-15V
TTLRS232转换芯片
连接器的机械特性
串口通信基本接线方法
9针串口(DB9)
25针串口(DB25)
针号
功能说明
缩写
针号
功能说明
缩写
1
数据载波检测
DCD
8
数据载波检测
DCD
2
接收数据
RXD
3
接收数据
RXD
3
发送数据
TXD
2
发送数据
TXD
4
数据终端准备
DTR
第十二讲 串行通信

位地址
功能
9FH
9EH
9DH
多机通 信控制
9CH
接收 允许
9BH
发送 第9位
9AH
接收 第9位
99H
发送 中断
98H
接收 中断
工作方式 选择
① SM0、SM1:串行口工作方式控制位,两位对应四种工作方式
SM0 SM1 0 0 0 1 1 0 1 1 工作方式 方式0 方式1 方式2 方式3 功能 8位同步移位寄存器 10位UART 11位UART 11位UART 波特率 fosc/12 可变 fosc/64或fosc/32 可变
11.1.5
串行通信的校验
异步通讯时可能会出现帧格式错、超时错等传输错误。差 错校验是保证准确无误通信的关键。
1、奇偶校验 发送数据时,数据位尾随的1位数据为奇偶校验位(1、0)。当 设置为奇校验时,数据中1的个数与校验位1的个数之和应为奇数;
当设置为偶校验时,数据中1的个数与校验位中的1的个数之和应 为偶数。
第十一章 串行接口与应用
11.1 串行通信的基本知识
11.2
MCS-51单片机串行口的结构与
工作方式
11.3
主从式多机通信
11.1 串行通信的基本知识
11.1.1 数据通信的基本概念
1、数据通信 计算机与计算机之间或计算机与其外界的数据传送 通信介质: 电话线、微波中继站、卫星链路和物理电缆 2、通信方式 (1)并行通信 ( 速度快、造价高) (2)串行通信(速度慢、造价低、应用广泛) (3)USB通信()
数据接收
接收数据时,SCON的REN=1。串行口 采样RXD端,当采样到从1向0的状态跳变时, 就认定是接收到起始位。随后在移位脉冲 的控制下,把接收到的数据位移入接收寄存 器中。直到停止位到来之后把停止位送入 RB8中,并置位中断标志位RI,通知CPU从 SBUF取走接收到的一个字符。
串行口通信讲解ppt课件

计数速率为fosc/12,当C/=1时,计数速率为外部输入时钟频率。
MCS-51串行口的波特率
方式1和方式3
实际上,当定时器T1做波特率发生器使用时,通常是工作在模式2 下,即作为一个自动重装载的8位定时器,此时TL1作计数用,自动
。
重装载的值在TH1内。设计数的预置值(初始值)为X,那么每过 256-X个机器周期,定时器溢出一次。为了避免溢出而产生不必要的 中断,此时应禁止T1中断。溢出周期为12×(256-X)/fosc.溢出率 为溢出周期的倒数。
。 2) 乙机接收
编程使乙机接收甲机发送过来的数据块,并存入片内50H~6FH单 元。接收过程要求判断RB8,若出错置F0标志为1,正确则置F0标志 为0,然后返回。
在进行双机通信时,两机应采用相同的工作方式和波特率。
RS-232C串行通信总线标准及其 接口
RS-232C的电气标准采用负逻辑,即: 逻辑“0”:+5V~+15V 逻辑“1”:-5V~-15V 因此,RS-232C不能和TTL电平直接相连,否则将使TTL电路烧坏, 实际应用时必须注意。RS-232C和TTL电平之间必须进行电平转换,常用 的电平转换集成电路MAX232。
接收时,REN置1,允许接收,串行口采样RXD,当采样由1到 0跳变时,确认是起始位“0”,开始接收一帧数据。当RI=0,且 停止位为1或SM2=0时,停止位进入RB8位,同时置中断标志RI; 否则信息将丢失。所以,采用方式1接收时,应先用软件清除RI 或SM2标志。
MCS-51为波特率。 波特率为每秒钟传送二进制数码的位数,也叫比特数, 单位为b/s,即位/秒。波特率用于表征数据传输的速度, 波特率越高,数据传输速度越快。通常,异步通信的波 特率为50~9600b/s。
零基础学单片机C语言程序设计 第11章 C51串行接口程序设计

(4)执行写发送缓冲器SBUF语句,示例如下:
SBUF=0x76;
//将0x76送入发送缓冲器
(5)在发送移位脉冲的作用下,数据帧依次从TXD引脚发出。
(6)在8位串行数据发送完毕后,也就是在插入停止位的时候,使TI 置1,用以通知CPU可以发送下一帧的数据。此时可以采用查询或者中 断两种方式来获知TI是否置位。当TI置位后,C51程序中清零TI,以便 于发送下一个数据。
串 行 控 制 寄 存 器 (98H)
RXD(P3.2)
11.1.3 串行接口控制寄存器SCON
控制寄存器SCON的字节地址为98H,可进行位寻址。该寄存 器用于选择串行通信的工作方式和某些控制功能,包括接 收/发送控制及设置状态标志等。
D7 D6 D5 D4 D3 D2 D1 D0
字节地址:98H
第11章 C51串行接口程序设计
11.1 51系列单片机的串行接口
51系列单片机内部集成的全双工串行通信接口电路,常称 为UART。该串行接口电路功能很强,不仅可以进行串行异 步数据的发送和接收,也可以作为一个同步移位寄存器使 用。
11.1.1 单片机串行通信概述
单片机和外部设备可以采用并行通信和串行通信两种方法 进行数据传输。
11.3.3 模式1的数据接收及C51程序设计
串行口的工作模式1为10位异步发送接收方式,单片机RXD 引脚为数据接收端。模式1接收数据中的定时信号可以有两 种,接收移位脉冲和接收字符的检测脉冲。
串行口模式1接收数据时的接收移位脉冲,由定时器1的溢 出信号和波特率倍增位SMOD来共同决定,即由定时器1的溢 出率经过16分频或32分频得到。
P1.0 P1.1 单 P1.2 片 P1.3 机 P1.4 1 P1.5 P1.6 P1.7
第11章 STC单片机SPI原理及实现

MOSI
主设备输出和从设备输入信号,实现主设备(发出数据)到从设 备(接收数据)的数据传输。
当STC的SPI接口作为主设备传输数据时,该信号方向为输出,指向从 设备;
当STC的SPI接口作为从设备接收数据时,该信号方向为输入,由从设 备指向STC单片机的SPI接口。
在主模式下,支持高达3MHzbps的数据传输率。如果单片机的 主频在20~36MHz,工作频率为12MHz时,可以提供更高的工作 速度。
在从模式下,速度受限,STC推荐数据率在SYSclk/4内的数据 传输率。
此外,SPI接口提供了完成标志和写冲突标志保护。
STC SPI模块结构及功能 ---SPI接口信号
以同时接收和发送数据。
在数据传输的过程中,将接收和发送的数据保存在数据缓冲器。
STC SPI模块结构及功能
--SPI模块内部结构
对于主模式来说,如果要发送一个字节的数据,只需要将该数据 写到SPDAT寄存器中。
在该模式下,SS信号不是必需的;
在从模式下,必须在SS信号变为有效并接收到合适的时钟信号 后,才可以开始进行数据传输。
STC SPI模块结构及功能
--SPI接口的数据通信方式
在这种通信配置模式中,从设备的SSIG位设置为0,SS用于选 择从设备。
SPI主设备可以使用任何引脚,包括P1.2/SS引脚来驱动SS信号。 主设备的SPI接口和从设备的SPI的8位移位寄存器构成一个循环
的16位移位寄存器。 在该模式下,主设备既可以向从设备发送数据,又可以读取从设
第11章 STC单片机SPI原理及实现
何宾 2015.02
第11章 计算机的串行通信习题
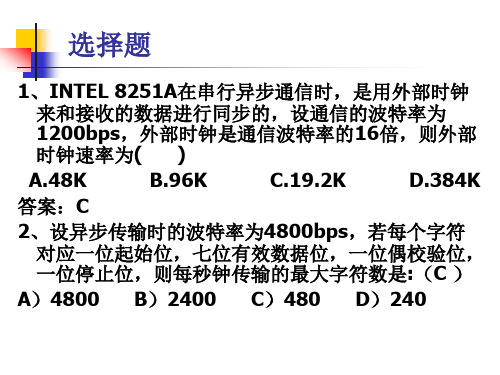
1、INTEL 8251A在串行异步通信时,是用外部时钟 来和接收的数据进行同步的,设通信的波特率为 1200bps,外部时钟是通信波特率的16倍,则外部 时钟速率为( ) A.48K B.96K C.19.2K D.384K 答案:C 2、设异步传输时的波特率为4800bps,若每个字符 对应一位起始位,七位有效数据位,一位偶校验位, 一位停止位,则每秒钟传输的最大字符数是:(C ) A)4800 B)2400 C)480 D)240
判断
1)RS-232总线能同TTL器件直接连接。( ×) 2) PC微机的RS-232C的串行通信接口线上是TTL 电平。 ( ×) 3)并ห้องสมุดไป่ตู้和串行通信都要求有固定的数据格式。( ×)
5、 8251A用作异步串行通信接口,如果设定波特率 因子为16,而发送器与接收器时钟频率为19200Hz, 则波特率为( A ) A)1200波特 B)2400波特 C)9600波特 D)19200波特 6、可编程通信接口芯片 8251A (D ) A. 可用作并行接口 B. 仅可用作异步串行接口 C. 仅可用作同步串行接口 D. 可用作同步、异步串 行接口
11 .在异步串行通信中,表示数据传送速率的是波特 率,这里的波特率是指( B ) A .每秒钟传送的 2 进制位数 B .每秒钟传送的字节数 C .每秒钟传送的字符数 D .每秒钟传送的数据帧数 12 .
填空题
1、按照串行数据的同步方式,串行通信可分为 两类。 答案:异步串行、同步串行 2、在串行通信数据传送中,通常传送制式有 ________、________和_______三种。 答案:单工、半双工、全双工 和
7. 与并行通信相比,串行通信适用于 (A)的情况。 A .传送距离远 B .传送速度快 C .传送信号好 D .传送费用高 8. 串行同步传送时,每一帧数据都是由 (D ) 开头的。 A. 低电平 B. 高电平 C. 起始位 D. 同步字符
第十一章 UART

第十一章异步串口通信概述S3C2410的UART提供3个独立的异步串行通信端口,每个端口可以基于中断或者DMA进行操作。
换句话说,UART控制器可以在CPU和UART之间产生一个中断或者DMA请求来传输数据。
UART在系统时钟下运行可支持高达230.4K 的波特率,如果使用外部设备提供的UEXTCLK,UART的速度还可以更高。
每个UART通道各含有两个16位的接收和发送FIFO。
S3C2410的UART包括可编程的波特率,红外接收/发送,一个或两个停止位插入,5-8位数据宽度和奇偶校验。
每个UART包括一个波特率发生器、一个发送器、一个接收器和一个控制单元,如图11-1所示。
波特率发生器的输入可以是PCLK或者UEXTCLK。
发送器和接收器包含16位的FIFO和移位寄存器,数据被送入FIFO,然后被复制到发送移位寄存器准备发送,然后数据按位从发送数据引脚TxDn输出。
同时,接收数据从接收数据引脚RxDn按位移入接收移位寄存器,并复制到FIFO。
特性—RxD0, TxD0, RxD1, TxD1, RxD2, 和TxD2基于中断或者DMA操作—UART Ch 0, 1, 和 2 具有 IrDA 1.0 & 16 字节 FIFO—UART Ch 0 和 1 具有 nRTS0, nCTS0, nRTS1, 和 nCTS1—支持发生/接收握手图11-1 UART方框图串口操作下述部分描述了UART的一些操作,包括数据发送、数据接收、中断产生、波特率发生、loop-back模式、红外模式和自动流控制。
数据发送发送数据的帧结构是可编程的,它由1个起始位、5-8个数据位、1个可选的奇偶位和1-2个停止位组成,这些可以在线控制寄存器ULCONn中设定。
接收器可以产生一个断点条件——使串行输出保持1帧发送时间的逻辑0状态。
当前发送字被完全发送出去后,这个断点信号随后发送。
断点信号发送之后,继续发送数据到Tx FIFO(如果没有FIFO则发送到Tx保持寄存器)。
微机系统串行通信接口

Python编程实现
总结词
Python是一种解释型、面向对象的高级 编程语言,具有简单易学、代码可读性 强等特点,适用于串行通信接口的脚本 编写。
VS
详细描述
在Python中,可以使用第三方库如 pySerial来实现串行通信接口的编程。 pySerial提供了串口打开、配置、读写等 函数和方法,可以方便地实现串行通信接 口的编程。具体实现过程中,需要设置串 口参数,并使用读写函数进行数据的发送 和接收。同时,还可以使用事件驱动的方 式处理串口数据接收和发送。
点,降低了系统成本和维护成本。
增强通信稳定性
03
相对于并行通信,串行通信具有更强的抗干扰能力,能够保证
数据的行通信接口的定义
串行通信接口
串行通信接口是一种数据传输方式, 通过串行方式逐位传输数据,实现微 机系统之间的信息交换。
串行通信接口的作用
串行通信接口在微机系统中扮演着重 要的角色,它能够实现不同设备之间 的数据传输和信息交换,是微机系统 之间进行通信的关键接口。
04 微机系统串行通信接口的 应用
串行通信接口在数据采集中的应用
数据采集
串行通信接口可以用于从各种传感器和设备中采集数据,如 温度、湿度、压力、流量等。通过串行通信,微机系统可以 接收来自传感器的实时数据,并进行处理和分析。
数据转换
在数据采集过程中,串行通信接口可以用于将模拟信号转换 为数字信号,或将数字信号转换为模拟信号。这种转换功能 使得微机系统能够更好地处理和解析来自不同类型传感器的 数据。
RS-485是一种改进型的串行通信接口 标准,采用差分信号传输方式,具有 更强的抗干扰能力和更远的传输距离。
串行通信接口的协议
异步协议
串行接口及串行通信技术
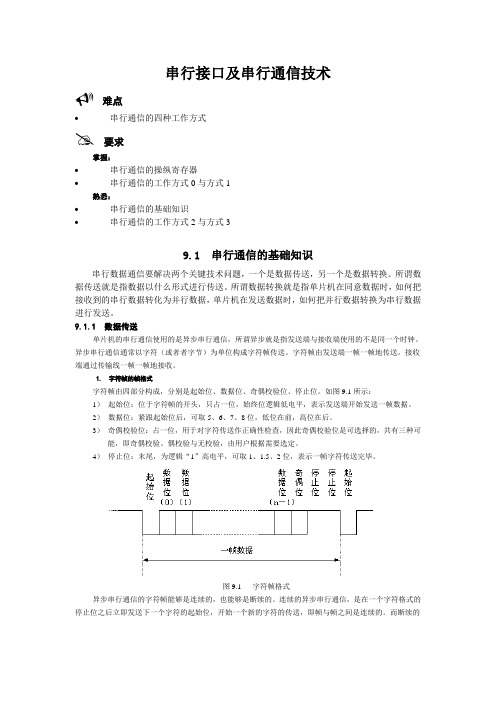
串行接口及串行通信技术难点•串行通信的四种工作方式要求掌握:•串行通信的操纵寄存器•串行通信的工作方式0与方式1熟悉:•串行通信的基础知识•串行通信的工作方式2与方式39.1 串行通信的基础知识串行数据通信要解决两个关键技术问题,一个是数据传送,另一个是数据转换。
所谓数据传送就是指数据以什么形式进行传送。
所谓数据转换就是指单片机在同意数据时,如何把接收到的串行数据转化为并行数据,单片机在发送数据时,如何把并行数据转换为串行数据进行发送。
9.1.1 数据传送单片机的串行通信使用的是异步串行通信,所谓异步就是指发送端与接收端使用的不是同一个时钟。
异步串行通信通常以字符(或者者字节)为单位构成字符帧传送。
字符帧由发送端一帧一帧地传送,接收端通过传输线一帧一帧地接收。
1. 字符帧的帧格式字符帧由四部分构成,分别是起始位、数据位、奇偶校验位、停止位。
如图9.1所示:1)起始位:位于字符帧的开头,只占一位,始终位逻辑低电平,表示发送端开始发送一帧数据。
2)数据位:紧跟起始位后,可取5、6、7、8位,低位在前,高位在后。
3)奇偶校验位:占一位,用于对字符传送作正确性检查,因此奇偶校验位是可选择的,共有三种可能,即奇偶校验、偶校验与无校验,由用户根据需要选定。
4)停止位:末尾,为逻辑“1”高电平,可取1、1.5、2位,表示一帧字符传送完毕。
图9.1 字符帧格式异步串行通信的字符帧能够是连续的,也能够是断续的。
连续的异步串行通信,是在一个字符格式的停止位之后立即发送下一个字符的起始位,开始一个新的字符的传送,即帧与帧之间是连续的。
而断续的异步串行通信,则是在一帧结束之后不一定接着传送下一个字符,不传送时维持数据线的高电平状态,使数据线处于空闲。
其后,新的字符传送可在任何时候开始,并不要求整倍数的位时间。
2. 传送的速率串行通信的速率用波特率来表示,所谓波特率就是指一秒钟传送数据位的个数。
每秒钟传送一个数据位就是1波特。
串行口通信原理及操作流程
串行口通信原理及操作流程51单片机的串行口是一个可编程全双工的通信接口,具有UART(通用异步收发器)的全部功能,能同时进行数据的发送和接收,也可以作为同步移位寄存器使用。
51单片机的串行口主要由两个独立的串行数据缓冲寄存器SBUF(发送缓冲寄存器和接收缓冲寄存器)和发送控制器、接收控制器、输入移位寄存器及若干控制门电路组成。
51 单片机可以通过特殊功能寄存器SBUF队串行接收或串行发送寄存器进行访问,两个寄存器共用一个地址99H,但在物理上是两个独立的寄存器,由指令操作决定访问哪一个寄存器。
执行写指令时访问串行发送寄存器;执行读指令时,访问串行接收寄存器。
(接收器具有双缓冲结构,即在接收寄存器中读出前一个已接收到的字节之前,便能接收第二个字节,如果第二个字节已接收完毕,而第一个字节还没有读出,则将丢失其中一个字节,编程时应引起注意。
对于发送器,因为是由cpu控制的,所以不需要考虑。
与串行口紧密相关的一个特殊功能寄存器是串行口控制寄存器SCON,它用来设定串行口的工作方式、接收/发送控制以及状态标志等。
串行口控制寄存器SCON串行口控制寄存器SCON在特殊功能寄存器中,字节地址为98H,可位寻址,单片机复位时SCON全部被清零。
位序号D7D6D5D4D3D2D1D0位符号SM0SM1SM2RENTB8RB8T1R1SM0,SM1为工作方式选择位。
串行口有四种工作方式,它们由SM0、SM1设定。
其中方式一最为常用。
SM2为多机通信控制位。
REN为允许串行接收位。
TB8为方式2、3中方式数据的第九位。
RB8为方式2、2中接收数据的第九位。
TI为发送中断标志位,在方式0时,当串行发送第8位数据结束时,或在其他方式,串行发送停止位的开始时,由内部硬件使TI置一,向CPU发出中断申请。
在中断服务程序中,必须使用软件将其清零,取消此中断申请。
RI为接收中断标志位。
在方式0时,当串行接收第8位数据结束时,或在其他方式,串行接收停止位的中间时,由内部硬件使RI置一,向CPU发出中断申请。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第11章串行通信接口
串行通信是微机和外部设备交换信息的方式之一。
所谓串行通信是通过一位一位地进行数据传输来实现通信。
与并行通信相比,串行通信具有传输线少,成本低等优点,适合远距离传送。
缺点是速度慢,若并行传送n位数据需时间T,则串行传送的时间最少为nT。
在实际传输中,是通过一对导线传送信息。
在传输中每一位数据都占据一个固定的时间长度。
§11.1 串行通信基础
串行通信分为2种类型:一种是同步通信方式,另一种是异步通信方式。
1、异步通信
异步通信的特点是:字符是一帧一帧的传送,每一帧字符的传送靠起始位来同步。
在数据传输过程中,传输线上允许有空字符。
所谓异步通信,是指通信中两个字符的时间间隔是不固定的,而在同一字符中的两个相邻代码间的时间间隔是固定的通信。
异步通信中发送方和接收方的时钟频率也不要求完全一样,但不能超过一定的允许范围,异步传输时的数据格式如图所示。
异步通信字符格式
字符的前面是一位起始位(低电平),之后跟着5~8位的数据位,低位在前、高位在后。
数据位后是奇、偶校验位,最后是停止位(高电平)。
是否要奇、偶校验位,以及停止位设定的位数是1,1.5位或2位都由初始化时设置异步方式字来决定。
2、同步通信
278
同步通信方式的特点是:由一个统一的时钟控制发送方和接收方,若干字符组成一个信息组,字符要一个接着一个传送;没有字符时,也要发送专用的“空闲”字符或者是同步字符,因为同步传输时,要求必须连续传送字符,每个字符的位数要相同,中间不允许有间隔。
同步传输的特征是:在每组信息的开始(常称为帧头)要加上l-2个同步字符,后面跟着8位的字符数据。
同步通信的数据格式如图所示。
同步字符1
同步
字符2
数据结束标志
同步通信字符格式
传送时每个字符的后面是否要奇、偶校验,由初始化时设同步方式字决定。
3、传输制式
串行通信中的工作方式分为:单工通信方式、半双工通信方式和全双工通信方式。
(1) 单工工作方式
在这种方式下,传输的线路用一根线连接,通信的一端连接发送器,另一端连接接收器,即形成单向连接,只允许数据按照一个固定的方向传送,如下图(a)所示。
即数据只能从A站点传送到B站点,而不能由B站点传送到A站点。
单工通信类似无线电广播,电台发送信号,收音机接收信号。
收音机永远不能发送信号。
(2) 半双工工作方式
如果在传输的过程中依然用一根线连接,这样在某一个时刻,只能进行发送,或只能进行接收。
由于是一根线连接,发送和接收不可能同时进行,这种传输方式称为半双工工作方式,如下图(b)所示。
半双工通信工方式类似对讲机,某时刻A方发送B方接收,另一时刻B方发送A方接收,双方不能同时进行发送和接收。
279
280
(3) 全双工工作方式
对于相互通信的双方,都可以是接收器也都可以是发送器。
分别用2根独立的传输线(一般是双绞线,或同轴电缆)来连接发送信号和接收信号,这样发送方和接收方可同时进行工作,称为全双工的工作方式,如下图(c)所示。
全双工通信工方式类似电话机,双方可以同时进行发送和接收。
(a)
(b)
(c)
串行通信工作方式
4、调制解调器
计算机对数字信号的通信,要求传输线的频带很宽,但在实际的长距离传输中,
通常是利用电话线来传输,电话线的频带一般都比较窄。
为保证信息传输的正确,都普遍采用调制解调器(modem)来实现远距离的信息传输,现在还有很多家庭上网仍使用modem 连接。
调制解调器,顾名思义主要是完成调制和解调的功能。
经过调制器(modulator)可把数字信号转换为模拟信号,经过解调器(demodulator)把模拟信号转换为数字信号。
现在modem 的数据传输速率理论值可达72Kb/s ,而实际速率仅为33.6Kb/s 。
将数字信号调制为模拟信号有3种方法:移频键控FSK ,移相键控PSK 和振幅键控ASK 。
信号调制不是数字量与模拟量的转换,前者要利用载波信号。
载波就是用于传输数据的模拟波形信号,没有载波将无法传输数据。
§11.2 串行接口标准RS -232C
281
一、RS -232C 的引脚定义
282
二、RS -232C 的连接
三、RS-232C的电气特性
283。