雷尼绍使用手册
雷尼绍光栅尺读书头安装手册

非接触光栅系统安装与使用指南RGS20-S 、RGS40-S 光栅安装(End Clamps)Renishaw (雷尼绍)安装准备1. 剪裁所需光栅,确保光栅的长度能满足行程的要求。
请预留把光栅尺伸延至“起始”标记点。
未到达标记点前,一定要避免光栅尺粘贴到表面上。
确保光栅尺已粘贴到全行程的表面上。
安装过程中,避免扭曲及用力拖拽光栅尺。
图(1)图(2)除去端压块底部两边的胶纸。
胶纸的作用是在胶水未稳固时临时固定端压块。
4. 把端压块粘贴到光栅尺的末端。
备注:必须擦净端压块周边的多余胶水,否则读数头的信号会受影响。
型号端压块(End Clamps)所有型号的光栅上安装,并能多次重复使用。
RGA22GRGA245RGA245RGA22G读数头安装读数头设定图(3)图(3)是一个简单安装支架设计。
螺丝(A) ---- 夹紧读数头,设定Pitch 参数螺丝(B) ---- 设定Yaw 参数和偏移螺丝(C) ---- 可设定Roll 参数安装支架设定固定读数头的托架,必须有平坦表面,能满足读数头安装上的机械公差。
其次必须能调节读数头高度并有足够的稳定性,以预防在读数头工作期间所受到的所有外界影响。
为了减少光栅的安装问题,在未使用光栅安装器(Scale Guide)粘贴光栅前,请先把机械托架的Roll 参数和Yaw 参数调节到读数头的误差范围内,可使用clock gauge 或precision square 完成设定。
对于RGH22、RGH26和RGH41,设定读数头的高度,可透过蓝色和或橙色的校准胶片放置于读数头和光栅尺之间,读数头的LED 安装指示灯显示绿色,表示安装正确。
橙色的校准胶片还可以帮助设定读数头相对于光栅尺的偏移和Yaw 参数 。
对于RGH24和RGH25读数头,设定只可透过蓝色校准胶片放置于读数头和光栅尺之间, 读数头的LED 安装指示灯显示绿色,表示安装正确。
读数头高度设定完成后,以缓慢的速度移动读数头,确保读数头的指示灯在光栅尺的整个行程内都保持绿色。
雷尼绍HPMA高精度自动对刀臂说明书

2
EC 符合性声明
Renishaw plc 公司声明以下产品: -
名称: 说明: 订货号:
HPMA 电动回转对刀臂 A-2181-XXXX 系列
按照以下标准进行制造: -
BS EN 61326-1:2006
测量、控制及实验室使用的电子设备 - EMC 要求 第一部分: 一般要求 抗扰: 表 2 - 工业场所 发射:A 类 - 工业场所
保修 属于保修范围的设备如需维修,必须返回供应商处进行处理。 如果错误使用设备、或经非公司授权人员维修调试后,Renishaw将不接受任何退换货要 求。
专利声明 以下专利涉及到本用户手册中提及的产品和其他类似产品(其他已申请的专利)的功能 特点:
CNw 03821790.2 EP 1092890 JPw 2002-531,839 JP 3847842 US 5,647,137 USw 7281336 B2
18
安装TSI3
安装TSI3
TSI3接口单元应该安装在CNC控制柜中。本单元放置的位置应尽可能远离变 压器和电机控制器等潜在干扰源。
4 mm
35 mm
R
130 mm
高度 98 mm
其他安装方式
M4
M4
TSI3 接口
19
TSI3接口
1 VIF 2 X-O
3 X+O
4 Z-O
5 Z+O
6 ARO
7 MRO
8 VIF 9 VIF 10 VM 10 0 VM 12 NC
13 0 VIF
接口24 V电源 18 V - 30 V X-输出 X+输出 Z-输出 Z+输出
5针M12面板安装电缆接头
33 30 67.5
CLY-CNC系列三坐标测量机使用说明书(雷尼绍系统)
CLY系列单臂三维测量仪CLY SINGLE-ARM COORDINATE MEASURING SYSTEM使用说明书INSTRUCTION MANUAL爱佩仪中测(成都)精密仪器有限公司API—NIMTT CO.,LTD总目录Table of ContentsINSTRUCTION MANUAL ........................................................................................................................................ - 0 -第一部分概述PART I OVERVIEW ........................................................................................................... - 2 -I.前言F OREWORD (2)II.性能特点P ERFORMANCE &F EA TURES (3)III.工作环境要求R EQUIREMENT FOR O PERA TING E NVIRONMENT (3)第二部分三坐标测量机主体PART TWO MAIN BODY OF CLY SINGLE-ARM COORDINATE MEASURING SYSTEM ............................................................................................................................................. - 5 -I.主体结构S TRUCTURE OF M AIN B ODY.. (5)II.使用注意事项P RECAUSIONS (9)III.仪器的维护与保养M AINTENANCE AND S ERVICE OF S YSTEM (9)第三部分电控系统 .................................................................................................................................................... - 11 -PART ⅢELECTRICAL CONTROL SYSTEM .................................................................................................... - 11 -Ⅰ电控系统的构成S TRUCTURE OF ELECTRICAL CONTROL SYSTEM . (11)Ⅱ控制系统的特点F EA TURES OF CONTROL SYSTEM (13)Ⅲ操作步骤OPERA TION PROCEDURE (14)Ⅳ控制器前面板指示灯说明及故障处理I NDICATOR ON THE PANEL OF CONTROLLER AND TROUBLE TREA TMENT (15)Ⅴ电控系统规格S PECIFICATION OF ELECTRICAL CONTROL SYSTEM (18)Ⅵ其它注意事项O THER PRECAUTIONS (19)第一部分概述Part I O verviewI. 前言Foreword在现代机械加工过程中,测量划线工作是保证产品质量,提高生产效率的重要手段,随着现代工业的发展,数控加工中心的日益增多,计算机辅助设计的普及,三坐标测量划线仪的作用不仅在于它比传统的计量器具增加了一两个坐标,扩大了测量对象,而且在于它是加工机床、计算机辅助设计以及反求设计等不可缺少的手段。
雷尼绍探头使用指南

安装指南OMP40-2光学机床测头© 2009-2015 Renishaw plc 版权所有本文档未经Renishaw plc事先书面许可,不得以任何形式,进行部分或全部复制或转换为任何其他媒体形式或语言。
出版本文档所含材料并不意味着Renishaw plc 放弃对其所拥有的专利权。
雷尼绍文档编号: H-4071-8518-04-A首次发布: 2009.02修订: 2015.05前言..........................................................................1.1前言 ......................................................................1.1免责声明 ................................................................1.1商标...................................................................1.1保修...................................................................1.1设备更改 ................................................................1.1数控机床 ................................................................1.1测头的保养 ..............................................................1.1专利...................................................................1.2 EC标准符合声明............................................................1.3废弃电子电气设备 (WEEE) 指令 ................................................1.3安全须知..................................................................1.4 OMP40-2基本介绍 .............................................................2.1简介 ......................................................................2.1入门...................................................................2.1系统接口 ................................................................2.1 Trigger Logic™(触发逻辑)................................................2.2测头模式..................................................................2.2可配置的设定 ...............................................................2.2开启/关闭方式 ............................................................2.2增强型触发滤波器 .........................................................2.4光学传输模式............................................................2.4光学功率 ................................................................2.4 OMP40-2尺寸..............................................................2.6 OMP40-2规格..............................................................2.6典型电池寿命 ............................................................2.7系统安装 ......................................................................3.1安装OMP40-2与OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM ......................3.1 OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM定位 .............................3.2OMP40-2安装指南ii目录与OMM-2 / OMI-2T / OMI-2H / OMI-2 配合使用的光学信号范围(调制传输)....................3.3 OMP40-2使用前的准备工作...................................................3.3安装测针 ................................................................3.3测针弱保护杆............................................................3.4安装电池 ................................................................3.5将测头安装到刀柄上 .......................................................3.6测针对中调整............................................................3.7标定OMP40-2 ..............................................................3.8为什么要标定测头? .......................................................3.8用镗孔或车削直径进行标定.................................................3.8用环规或标准球进行标定...................................................3.8标定测头长度............................................................3.8Trigger Logic™(触发逻辑) ..................................................4.1检查测头设定 ...............................................................4.1测头设定记录 ...............................................................4.2更改测头设定 ...............................................................4.4工作模式..................................................................4.6维护..........................................................................5.1维护 ......................................................................5.1清洁测头..................................................................5.1更换电池..................................................................5.2OMP40M 系统.................................................................6.1OMP40M 系统..............................................................6.1OMP40M 尺寸..............................................................6.1OMP40M 螺钉扭矩值 .........................................................6.2OMP40-2LS 系统..............................................................7.1简介 ......................................................................7.1与OMM-2 / OMI-2T / OMI-2H / OMI-2配合使用的光学信号范围(调制传输).............7.2查错..........................................................................8.1零件清单 ......................................................................9.1前言免责声明RENISHAW已尽力确保发布之日此文档的内容准确无误,但对其内容不做任何担保或陈述。
雷尼绍探头设定及使用
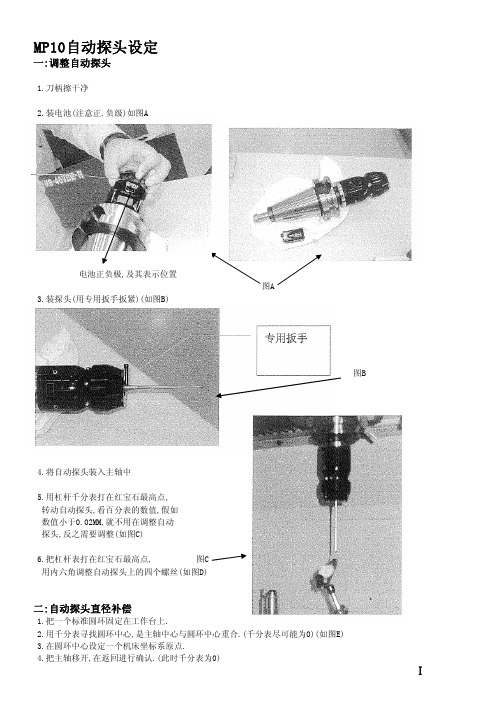
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。
雷尼绍QC20-W无线球杆仪系统说明书

QC20-W无线球杆仪系统硬件软件QC20-W球杆仪及球杆仪组件QC20-W球杆仪包括一个雷尼绍自主设计的精密位移传感器。
它用于测量球杆仪在绕一个固定点旋转时的半径变化。
该数据用于根据 ISO 230-4、ASME B5.54/57 和GB17421.4等国际标准计算定位精度的总体测量值(圆度、圆度偏差)。
在采用雷尼绍独特的诊断报告格式分析该数据时,还可提供单个误差源的详细诊断。
数据以图形和数字的格式显示,用以帮助故障诊断。
信号处理在球杆仪内部进行,数据传输使用Bluetooth®(蓝牙)二类模块输送至匹配的个人计算机中。
传感器壳体上有一个LED状态指示灯,对通讯、电池和故障状态进行指示。
每套系统随机配备一只标准(非充电型)CR2锂电池,不过系统的电子装置和组件也允许使用可充电CR2 电池。
球杆仪校准规每套QC20-W组件 (A-8014-1510) 均随附一个球杆仪校准规,用于校准球杆仪的长度。
它由零温度膨胀系数的材料制成。
当与校准规配合使用时,QC20-W球杆仪可以计算绝对(而不是相对)误差,来决定各轴比例匹配关系和径向偏差值,满足ISO 230-4和ASME B5.54/57分析所需。
此外,球杆仪软件还会自动计算待测机器的位置公差。
(位置公差值是在球杆仪测试区域、在无负载条件下对机器在某一平面内双向定位精度好坏的一个估计)校准规可以校准100 mm、150 mm及300 mm的长度。
小圆组件包含一个50 mm校准规。
QC20-W球杆仪组件组件包括• QC20-W无线球杆仪(和一只CR2电池)• 中心座• 工具杯• 50、150和300 mm加长杆• 球杆仪校准规• 中心设定球• 系统软件(含手册)• “QC20-W球杆仪入门指南”光盘• 机器验证卡• 校准证书• 系统便携箱(便携箱组件包括用于存放小圆组件和VTL适配器的带槽口的海绵块)2QC20-W 球杆仪Bluetooth文字商标和标识归Bluetooth SIG, Inc.所有,Renishaw plc使用的所有此类商标均已获得授权。
雷尼绍XL80激光干涉仪操作手册

镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110RENISHAW 公司简介RENISHAW为一家英国公司,产品营销全世界,主要产品有三次元量床之测头、测针、BALLBAR循圆测试仪、镭射干涉仪・・・・・・・・等等及产品经NPL(英国国家标准)认证为ISO 9001之合格厂商RENISHAW公司为机器设备制造商提供量测检验系统的仪器,提供各种用于机器精度检定的量测设备进而改善机器的精度RENISHAW XL80 高性能镭射干涉仪是机床、三次元坐标量床及其它定位装置精度校准用的高性能仪器,由于最新电子技术的应用,使其镭射波长非常稳定并保持了低成本高效率的工作流程RENISHAW 产品介绍:镭射干涉仪量测系统循圆测试仪器(BALLBAR)量测系统三次元测头测针系列黏贴式光学尺系列镭射干涉仪量测原理MICHELSON E0 干涉原理两个频率振幅波长相同的镭射光波因相位变化而发生不同程度的干涉a.相长干涉(建设性干涉)b.相消干涉(破坏性干涉)相长干涉相消干涉1.波的速度V=fλ 若f,λ const . 则V const2.干涉量测原理3.镭射干涉仪:一般镭射干涉仪均为氦氖镭射,其镭射光为红色波长0.6329μm长期稳定误差0.05ppm以下(10个波长相差0.5个波)其优点:a.测量范围大b.简化以往光学仪器结构c.测量速度快缺点:易受大气环境影响因波长常会随温度、气压、湿度而变化(因镭射光以空气为传递介质)4.镭射干涉仪一般量测项目:(一)定位精度、距离量测、重复性(二)速度、加速度、动态量测(三)角度量测:a.垂直方向角度(pitch)b.水平方向角度(yaw)(四)真直度量测:a.垂直方向b.水平方向(五)直角度量测(六)平面度量测(七)平行度量测(八)旋转角度量测注意事项:(1)三脚架置于待测物适当位置,地基稳固不可摇晃及避免人员和机器碰触的地方(2)三脚架之水平气泡调至中央位置固定(3)信号线之插头,红点表示向上,各线接头缺口部份确实吻合方可插入(4)各电源线、信号线连接或拔除时,各仪器需均在OFF状态,否则会对仪器造成伤害(5)给予稳定独立电源,确实不漏电环境中使用(6)短距离量测(50mm内)亦产生余弦误差,先校直度再作定位(6)对焦时避免反射回来的镭射光打在镭射光射出口处(7)镭射先热机稳定后,再做镭射量测(8)操作中确认XC80(环境补偿系统)是监控中,每7秒各侦测一项,以42秒为一次循环(9)镭射干涉仪设备存放地点尽量保持干燥镭射干涉仪防止误差及保养1﹒镭射干涉仪防止误差(1)量测周围环境应尽量避免太阳光直接照射或突然流动的风产生扰流现象(2)装设干涉镜及反射镜在被测机台上时,必须牢固,否则机台移动会造成不可预期的量测误差(3)环境侦测感应器与材料温度感应器是否作动,必须于量测前确实检查,以免造成不必要的误差(4)要获得最佳精度并减少误差,建议遵守下列规定:a﹒在校验环境条件中执行量测b﹒激光束需作确实校直c﹒需注意量测时的周围条件d﹒牢固地装设镜组(3)在量测执行中不可因其它因素而中断,量测必须一次完成检验,若发生量测中断情形,必须重新执行检验2﹒镭射干涉仪保养方法(1)使用时应防止碰撞及震动(2)工作完毕应循操作方法反顺序逐一拆卸并且擦拭干净置回仪器盒内(3)金属平台在使用完后应擦拭干净(4)干涉镜及反射镜片应使用光学镜片专用擦拭纸做圆形回转擦拭(注意严禁使用酒精或具有挥化性及腐蚀性之清洁液擦拭,请干擦,因镜面有镀一层蓝色薄墨,而激光束是靠此薄墨产生折射与反射,如果使用具有挥化性或腐蚀性之清洁液会将此薄墨破坏,如果镜面没有薄墨折射率既减弱而影响光强,且无法再镀上此薄墨,请注意小心使用)(5)应小心搬运尤其对镜片类应有适当防护与防震,暂不用时以干净东西覆盖安全注意事项1.镭射光属二级镭射,建议勿长时间直视镭射光2.镭射预热时可将镭射光闸暂时关闭,镜组对焦时再予以打开3.对焦时尽量避免反射之镭射光打在镭射头的镭射发射出口处,以免镭射造成不良影响4.架设镜组前,先将机器欲测轴全行程来回移动,观察机器移动空间并决定镜组架设位置,当镜组架设至机台后,使用手动慢速移动机器确定移动空间无其它干涉物后,机器才可改为自动移动5.架设或操作镭射干涉仪时,闲杂人等避免靠近,以免拌到电源线或传输线6.确认电压伏特是否正确,并且所使用的电力来源尽量能够独立,并加稳压器.镭射光原理及特性1.光的相关原理光为一种无质量的微粒子(牛顿)光为一种电磁波(马克士威尔)光具有粒子与波动的性质2.光的特性方向性直线性波动性3.波的基本物理量频率f、周期T、振幅A、波长λ、其中波长是长度单位4.何谓镭射光对某种元素施予能量,使其原来稳定的基态(低能阶)变为不稳定的激态(高能阶),元素会由激态(高能阶)释放出能量后变回原来的基态(低能阶) 再释放能量的过程中会产生一种光,我们谓之镭射光5.镭射光之特性A.高单频性:光的频率即是色,高纯频率即是高单色,一般可见光包含红、澄、黄、绿、蓝、靛、紫、频率纯度较低B.高方向性:镭射光配合聚光镜的发散角度非常小,而一般光线其扩散角度都非常大C.高亮度性:其光线亮度比一般光线亮度大数倍(视镭射而定)硬件介绍XL80 镭射头XC80 环境补偿系统8XC80 环境补偿系统插槽示意图夹持器组线性定位量测镜组角度量测镜组Z轴直度量测镜组及附件垂直度量测镜平坦度量测镜组旋转轴量测系统镭射头微调平台重负荷三脚架镭射架设联机流程图1﹒镭射架设及量测流程表15定位量测原理及操作1﹒线性定位量测原理:(一)架设方式:干涉镜不动,移动反射镜反射镜不动,移动干涉镜(二)何谓线性定位精度:CNC机器执行时,程序之坐标点未必是机器的坐标点,程序坐标点为理想值,机器坐标点为实际值,两者之间差为机器的定位精度(三)线性定位误差原因:误差原因可能是导程误差、控制器误差、机器几何误差及震动等原因(四)线性定位量测的目的:量测出机台可能因零件和组装所造成的误差,可利用机器参数补偿或重新组装改进机器加工机精度,确保机器加工的质量(五)镭射干涉仪定位量测发生误差的原因:a﹒空气、温度、湿度、气压等影响b﹒待测物之热膨胀系数c﹒电子误差d﹒死径误差(图一)e﹒阿倍(ABBE)误差(图二)f﹒余弦(COS)误差(图三)g﹒震动误差h﹒镜组热膨胀飘移镭射干涉仪量测数据是以数值方式显示,并没有一般量测时有人为读值判定所产生的误差162﹒量测方式a﹒线性(linear)方式---单向---2次b﹒线性(linear)方式---双向---2次17C﹒朝圣(pilgrim)方式---单向---2次d﹒朝圣(pilgrim)方式---双向---2次18e﹒钟摆(pendulum)方式---单向---2次f﹒钟摆(pendulum)方式---单向---2次镭射架设易发生之误差1﹒死径误差(如图一所示)˙死径误差是一种与使用XC80 自动补偿的线性量测过程中的环境因子变化有关的误差。
雷尼绍XL80激光干涉仪操作手册
镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110RENISHAW 公司简介RENISHAW为一家英国公司,产品营销全世界,主要产品有三次元量床之测头、测针、BALLBAR循圆测试仪、镭射干涉仪・・・・・・・・等等及产品经NPL(英国国家标准)认证为ISO 9001之合格厂商RENISHAW公司为机器设备制造商提供量测检验系统的仪器,提供各种用于机器精度检定的量测设备进而改善机器的精度RENISHAW XL80 高性能镭射干涉仪是机床、三次元坐标量床及其它定位装置精度校准用的高性能仪器,由于最新电子技术的应用,使其镭射波长非常稳定并保持了低成本高效率的工作流程RENISHAW 产品介绍:镭射干涉仪量测系统循圆测试仪器(BALLBAR)量测系统三次元测头测针系列黏贴式光学尺系列镭射干涉仪量测原理MICHELSON E0 干涉原理两个频率振幅波长相同的镭射光波因相位变化而发生不同程度的干涉a.相长干涉(建设性干涉)b.相消干涉(破坏性干涉)相长干涉相消干涉1.波的速度V=fλ 若f,λ const . 则V const2.干涉量测原理3.镭射干涉仪:一般镭射干涉仪均为氦氖镭射,其镭射光为红色波长0.6329μm长期稳定误差0.05ppm以下(10个波长相差0.5个波)其优点:a.测量范围大b.简化以往光学仪器结构c.测量速度快缺点:易受大气环境影响因波长常会随温度、气压、湿度而变化(因镭射光以空气为传递介质)4.镭射干涉仪一般量测项目:(一)定位精度、距离量测、重复性(二)速度、加速度、动态量测(三)角度量测:a.垂直方向角度(pitch)b.水平方向角度(yaw)(四)真直度量测:a.垂直方向b.水平方向(五)直角度量测(六)平面度量测(七)平行度量测(八)旋转角度量测注意事项:(1)三脚架置于待测物适当位置,地基稳固不可摇晃及避免人员和机器碰触的地方(2)三脚架之水平气泡调至中央位置固定(3)信号线之插头,红点表示向上,各线接头缺口部份确实吻合方可插入(4)各电源线、信号线连接或拔除时,各仪器需均在OFF状态,否则会对仪器造成伤害(5)给予稳定独立电源,确实不漏电环境中使用(6)短距离量测(50mm内)亦产生余弦误差,先校直度再作定位(6)对焦时避免反射回来的镭射光打在镭射光射出口处(7)镭射先热机稳定后,再做镭射量测(8)操作中确认XC80(环境补偿系统)是监控中,每7秒各侦测一项,以42秒为一次循环(9)镭射干涉仪设备存放地点尽量保持干燥镭射干涉仪防止误差及保养1﹒镭射干涉仪防止误差(1)量测周围环境应尽量避免太阳光直接照射或突然流动的风产生扰流现象(2)装设干涉镜及反射镜在被测机台上时,必须牢固,否则机台移动会造成不可预期的量测误差(3)环境侦测感应器与材料温度感应器是否作动,必须于量测前确实检查,以免造成不必要的误差(4)要获得最佳精度并减少误差,建议遵守下列规定:a﹒在校验环境条件中执行量测b﹒激光束需作确实校直c﹒需注意量测时的周围条件d﹒牢固地装设镜组(3)在量测执行中不可因其它因素而中断,量测必须一次完成检验,若发生量测中断情形,必须重新执行检验2﹒镭射干涉仪保养方法(1)使用时应防止碰撞及震动(2)工作完毕应循操作方法反顺序逐一拆卸并且擦拭干净置回仪器盒内(3)金属平台在使用完后应擦拭干净(4)干涉镜及反射镜片应使用光学镜片专用擦拭纸做圆形回转擦拭(注意严禁使用酒精或具有挥化性及腐蚀性之清洁液擦拭,请干擦,因镜面有镀一层蓝色薄墨,而激光束是靠此薄墨产生折射与反射,如果使用具有挥化性或腐蚀性之清洁液会将此薄墨破坏,如果镜面没有薄墨折射率既减弱而影响光强,且无法再镀上此薄墨,请注意小心使用)(5)应小心搬运尤其对镜片类应有适当防护与防震,暂不用时以干净东西覆盖安全注意事项1.镭射光属二级镭射,建议勿长时间直视镭射光2.镭射预热时可将镭射光闸暂时关闭,镜组对焦时再予以打开3.对焦时尽量避免反射之镭射光打在镭射头的镭射发射出口处,以免镭射造成不良影响4.架设镜组前,先将机器欲测轴全行程来回移动,观察机器移动空间并决定镜组架设位置,当镜组架设至机台后,使用手动慢速移动机器确定移动空间无其它干涉物后,机器才可改为自动移动5.架设或操作镭射干涉仪时,闲杂人等避免靠近,以免拌到电源线或传输线6.确认电压伏特是否正确,并且所使用的电力来源尽量能够独立,并加稳压器.镭射光原理及特性1.光的相关原理光为一种无质量的微粒子(牛顿)光为一种电磁波(马克士威尔)光具有粒子与波动的性质2.光的特性方向性直线性波动性3.波的基本物理量频率f、周期T、振幅A、波长λ、其中波长是长度单位4.何谓镭射光对某种元素施予能量,使其原来稳定的基态(低能阶)变为不稳定的激态(高能阶),元素会由激态(高能阶)释放出能量后变回原来的基态(低能阶) 再释放能量的过程中会产生一种光,我们谓之镭射光5.镭射光之特性A.高单频性:光的频率即是色,高纯频率即是高单色,一般可见光包含红、澄、黄、绿、蓝、靛、紫、频率纯度较低B.高方向性:镭射光配合聚光镜的发散角度非常小,而一般光线其扩散角度都非常大C.高亮度性:其光线亮度比一般光线亮度大数倍(视镭射而定)硬件介绍XL80 镭射头XC80 环境补偿系统8XC80 环境补偿系统插槽示意图夹持器组线性定位量测镜组角度量测镜组Z轴直度量测镜组及附件垂直度量测镜平坦度量测镜组旋转轴量测系统镭射头微调平台重负荷三脚架镭射架设联机流程图1﹒镭射架设及量测流程表15定位量测原理及操作1﹒线性定位量测原理:(一)架设方式:干涉镜不动,移动反射镜反射镜不动,移动干涉镜(二)何谓线性定位精度:CNC机器执行时,程序之坐标点未必是机器的坐标点,程序坐标点为理想值,机器坐标点为实际值,两者之间差为机器的定位精度(三)线性定位误差原因:误差原因可能是导程误差、控制器误差、机器几何误差及震动等原因(四)线性定位量测的目的:量测出机台可能因零件和组装所造成的误差,可利用机器参数补偿或重新组装改进机器加工机精度,确保机器加工的质量(五)镭射干涉仪定位量测发生误差的原因:a﹒空气、温度、湿度、气压等影响b﹒待测物之热膨胀系数c﹒电子误差d﹒死径误差(图一)e﹒阿倍(ABBE)误差(图二)f﹒余弦(COS)误差(图三)g﹒震动误差h﹒镜组热膨胀飘移镭射干涉仪量测数据是以数值方式显示,并没有一般量测时有人为读值判定所产生的误差162﹒量测方式a﹒线性(linear)方式---单向---2次b﹒线性(linear)方式---双向---2次17C﹒朝圣(pilgrim)方式---单向---2次d﹒朝圣(pilgrim)方式---双向---2次18e﹒钟摆(pendulum)方式---单向---2次f﹒钟摆(pendulum)方式---单向---2次镭射架设易发生之误差1﹒死径误差(如图一所示)˙死径误差是一种与使用XC80 自动补偿的线性量测过程中的环境因子变化有关的误差。
Fanuc系统机床雷尼绍探头编程说明

Fanuc系统机床雷尼绍探头编程说明 (1)1、Fanuc探头相关技术基础及原理 (2)2、探头使用规范 (4)3、全局变量的使用情况 (6)4、测头长度校正-O9801 (8)5、校正测针X/Y偏置-O9802 (9)6、校正测针球半径-O9803 (9)7、保护移动程序-O9810 (10)8、单点测量程序-O9811 (11)9、槽/凸台测量程序-O9812 (12)槽测量程序- O9812 (13)凸台测量程序- O9812 (13)有凸台的槽测量程序- O9812 (14)10、孔/圆台测量程序-O9814 (14)孔测量程序-O9814 (15)圆台测量程序-O9814 (15)有圆台的内孔测量程序-O9814 (15)11、内拐角测量-O9815 (16)12、外拐角处测量-O9816 (17)1、 Fanuc探头相关技术基础及原理G31用于触发跳转编程格式:(G90/G91)G31 X x(G90/G91)G31 Y y(G90/G91)G31 Z zG31后只能编程一个轴地址在G31行代码执行过程中,探头移动时若接触零件,则触发跳转,结束本行剩余行程运动,直接跳转至下行程序运动,并记录跳转时当前工件坐标系下的位置信息。
#5061——第1轴跳转信号位置#5062——第2轴跳转信号位置#5063——第3轴跳转信号位置#5064——第4轴跳转信号位置然后利用宏程序读取这几个变量,通过一定的数据计算处理、写入等实现测量、找正、补偿等探头系列操作。
#4014——当前激活的工作偏置,值:54-59,代表G54-G59附常用系统变量:刀具补偿相关变量(补偿号<=200组,若>200组,查阅《数控车/铣宏程序开发》P16)#3000用于系统报警,编程格式如下:#3000=“报警号”;(“报警说明”)注:报警号只能为英语,例:IF [#20 EQ #0] THEN #3000=80;(TOOL NOT FOUND)若IF条件成立,则发出报警,并在屏幕上显示以下信息:3080 (TOOL NOT FOUND)2、探头使用规范●对于初学者,以下变量范围,建议先不用:•#100-#199•#500-#550•其他全局变量可按需要使用●测头使用必须要标定•初次使用时•更换测针后•使用一段时间后•标定后,挂刀方向要固定•标定时的进给与测量的进给保持一致测头报警信息●3086-PATH OBSTRUCTED•保护移动过程中,光线阻挡•保护移动过程中,测头碰触到障碍物●3092-PROBE OPEN•测量是二次触发,第一次测量后,测头需要完全离开产品表面,再进行第二次测量,如果在第一次后,不能完全离开产品表面,会报警;•可以通过修改#506,将#506中的值增大●3093-PROBE FAIL•测量移动结束时,还没有触碰到任何物体,报警•查看O9811,O9812,O9814后面指定的数据是否有误•坐标系设定等3、全局变量的使用情况4、测头长度校正-O9801格式:G65 P9801 Zz Tt举例:G65 P9801 Z0. T21Tt 要更新的刀具号.Zz 标准表面的工件坐标.O1000G17 G40 G49 G69 G80 G90G54 X0 Y0G43 H21 Z20.G65 P9801 Z0 T21G91 G28 Z0G90M30注意:在这里T21的刀补中要有一个预置的大概刀长为什么要校正:●测头安装后,测头中心与主轴的偏心量●测针球的直径误差●测头的触发距离●机床的重复性所以,每次更换测头,或者更换测针后,必须校正!!校正项目:●测头长度校正》值存放在刀具补偿●测针半径校正》值存放在全局变量●测针偏心校正》值存放在全局变量5、校正测针X/Y偏置-O9802格式:G65 P9802 Dd举例:G65 P9802 D50.005Dd: 用于校正的环规直径O1000G17 G40 G49 G69 G80 G90G54 X0 Y0(环规中心)G65 P9802 D50.005G91 G28 Z0G90M30注意:1.准确将主轴定位至环规的中心位置并将测针置于环规内部2. 程序运行后,会将偏心写入#502和#503 6、校正测针球半径-O9803格式:G65 P9803 Dd举例:G65 P9803 D50.005Dd: 用于校正的环规直径O1000G17 G40 G49 G69 G80 G90G54 X0 Y0(环规中心)G65 P9803 D50.005G91 G28 Z0G90M30注意:1.准确将主轴定位至环规的中心位置并将测针置于环规内部2. 程序运行后,会将半径写入#500和#5017、保护移动程序-O9810功能:在测头移动时,如果有障碍物阻挡,机床停止并报警格式:G65 P9810 Xx Yy Zz FfXx Yy Zz:目标位置在当前坐标系下的坐标Ff:移动的进给率注意1.目标位置指定可以单独指定X/Y/Z中的任何一个值;也可以同时指定其中任意2个或3个全部指定举例:G65 P9810 Y-1. F3000G65 P9810 X0 Z-5. F3000G65 P9810 X0 Y1. Z2. F40002.报警当在移动的过程中,碰到障碍,机床停止,报警号3086提示信息“PATH OBSTRUCTED”#3000 = 86 (PATH OBSTRUCTED)8、单点测量程序-O9811功能:每次测量一个面常用格式:G65 P9811 Xx或Yy或ZzXx Yy Zz:目标位置在当前坐标系下的坐标常用扩展格式:G65 P9811 Xx或Yy或Zz [Ss Tt][ ]中的变量为可选输入变量Ss:欲更新的坐标系Tt:欲更新的刀具编号举例:G65 P9811 X0. S101G65 P9811 Z10. T4S参数工件偏置S参数工件偏置S1 G54 S0 G53S2 G55 S101 G54.1 P1 S3 G56 S102 G54.1 P2 S4 G57 Etc. Etc.S5 G58 S148 G54.1 P48 S6 G59注意1.目标位置指定每次只能指定X/Y/Z中的一个值举例:G65 P9811 X-1.G65 P9811 Z-5.G65 P9811 Y1.测量后的数据输出:1.G65 P9811 X4.输出:#135-实测值(4.012)#140-误差值(0.012)2.G65 P9811 Y4.输出:#136-实测值(4.012)#141-误差值(0.012)1.G65 P9811 Z4.输出:#137-实测值(4.012)#142-误差值(0.012)9、槽/凸台测量程序-O9812功能:测量沿X/Y轴向的槽/凸台,见上图常用格式:G65 P9812 Xx或Yy[Zz Rr Ss Tt] Xx:X方向的槽/凸台测量Yy:Y方向的槽/凸台测量Zz:图2和图3形式的特征测量点Z坐标Rr:图3特征测量时,回退量Ss:欲更新的坐标系Tt:欲更新的刀具编号注意:在使用此程序前,需要事先将测头定位在欲测特征的理论中心上槽测量程序- O98121. G65 P9812 X12. [S1 T3]输出:#135-槽对称中心X坐标#140-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值2. G65 P9812 Y12. [S2 T4]输出:#136-槽对称中心X坐标#141-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值凸台测量程序- O98121. G65 P9812 X12. Z1. [S1 T3]输出:#135-槽对称中心X坐标#140-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值2. G65 P9812 Y12. Z1. [S2 T4]输出:#136-槽对称中心X坐标#141-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值有凸台的槽测量程序- O98121. G65 P9812 X12. Z-1. R-2. [S1 T3]输出:#135-槽对称中心X坐标#140-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值2. G65 P9812 Y12. Z-1.[S2 T4 R2.]输出:#136-槽对称中心X坐标#141-槽对称中心坐标值与理论值的误差#138-槽的实测宽度#143-槽的实测宽度与理论宽度的差值10、孔/圆台测量程序-O9814功能:4点测量孔或圆台,见上图常用格式:G65 P9814 Dd [Zz Rr Ss Tt] Dd:孔或圆台的直径Zz:图2和图3形式的特征测量点Z坐标Rr:图3特征测量时,回退量Ss:欲更新的坐标系Tt:欲更新的刀具编号注意:在使用此程序前,需要事先将测头定位在欲测特征的理论中心上孔测量程序-O98141. G65 P9814 D12. [S1 T3]输出:#135-圆心X坐标#140-圆心测量X坐标值与理论值的误差#136-圆心Y坐标#141-圆心测量X坐标值与理论值的误差#138-圆的实测直径#143-圆的直径测量值与理论值的误差圆台测量程序-O98141. G65 P9814 D12. Z-2.[S1 T3]输出:#135-圆心X坐标#140-圆心测量X坐标值与理论值的误差#136-圆心Y坐标#141-圆心测量X坐标值与理论值的误差#138-圆的实测直径#143-圆的直径测量值与理论值的误差有圆台的内孔测量程序-O98141. G65 P9814 D12. Z-2. R-2.[S1 T3]输出:#135-圆心X坐标#140-圆心测量X坐标值与理论值的误差#136-圆心Y坐标#141-圆心测量X坐标值与理论值的误差#138-圆的实测直径#143-圆的直径测量值与理论值的误差11、内拐角测量-O9815G65 P9815 X0 Y0 I5. J-5. S1输出:变量描述变量描述#135 X 位置#143 Y角度误差#136 Y 位置#144 X角度误差#137 #145 真实位置误差12、外拐角处测量-O9816 G65 P9816 X0 Y0 S1G65 P9816 X0 Y0 I-5.0 J5.0 S1输出:。
雷尼绍数控机床探测系统说明书
Pocket guide to probes for CNC machine toolsSolutionsProbes for CNC machine tools Solutions ...Pocket guide contentsReduce set times by up to 90% when using Renishaw’s innovative solutionsThis pocket guide provides a complete overview of Renishaw’s focus products for CNC machine tools and helps you to better understand the benefits that probingcan bring to your business.Why probe? 1 Expected benefits from using Renishaw probing systems 3 Component set-upComponent inspectionTool setting and broken tool detectionPowerful PC-based probe softwareSupporting macro probing softwareWhy probe?Time is money. Time spent manually setting work piece positions and inspecting finished product is better invested in machining.Renishaw’s probing systems eliminate costly machine down-time and thescrapping of components associated with manual setting and inspection.Y our machines are only profitable when they are producing good parts.Do you have unprofitable downtime?Why are most of your machines idle for hours?Simple. Many companies are still setting tools and parts manually, andinspecting parts remote from the machine – both result in an expensive piece of equipment lying idle.REDUCE downtime and scrap – INCREASE your uptimeand accuracyManual tool-setting, job set-up and inspection are time consuming, and prone to operator errors. Probing eliminates the need for tool presetters, expensive fixtures and manual setting with dial indicators. Probing is fast and reliable, and machine offsets can be automatically adjusted.The probing software automatically compensates for tool length and diameter, work piece position and dimensional errors. Powerful software packages are available from Renishaw using easily programmable macros for tool setting, workpiece set-up and measurement. These probing cycles, viewed asindustry-standard, are simply incorporated into part programs andautomatically called with standard machine codes.Renishaw probes are used by companies worldwide to increase productivity and improve part quality. They can be specified as standardequipment from most leading manufacturers. Simple installation allowsprobes to be retrofitted to machines already installed.1Renishaw probe systems provide an innovative solution to improve the efficiency of your machine toolsExpected benefits from using Renishaw probe systemsProduct/Application guideThis guide will help you identify which probes are most suited to your applicationVertical CNCmachiningcentresHorizontal CNCmachiningcentresGantry CNCmachiningcentremachinesCNC lathesCNC Mill/T urncentreCNC grindersPCB drilling and routing machinesTechnology centreBreakthrough solutions are at the heart of Renishaw's business strategy, which is captured by the phrase ‘apply innovation’.The innovative product design is a result of unparalleled investment into R&D, allowing Renishaw to offer you market leading solutionsTwin probe system New productsRenishaw’s new twin probe optical signal transmission system uses a single optical receiver for tool setting probe and spindle-mounted inspection probe installations, offering fast integration and a cable-free machine environment. The system is easily integrated on a wide range of machining centres and CNC milling machines,TRS2 non-contact broken tool detection systemNew productsRMP600 high accuracy inspection probeThe RENGAGE™ technology combines a patented sensing mechanism andMP250 high accuracy, ultra compact inspection probe for Grinding machinesComponent set-up and inspection solutions Probe systems forMACHINING CENTRES NEW!NEW!Inspection probes for GRINDING/TURNING CENTRES Component set-up and inspection solutionsNEW!Optical transmission systems for LP2 and LP2H probesTool checking probes for MACHINING CENTRES Tool setting and broken tool detection solutionsThe NC4 system is NEW!NEW!Arm probe systems for TURNING CENTRES Tool setting and broken tool detection solutionsProductivity+™ suitePC-based software solutions for machining centresPC-based software solutions for machining centresRenishaw OMV - On Machine VerificationSupporting macro probing software solutionsProbing packages availableQC10 ballbar automated circularity testAccurateQC10 ballbar system is laser-calibrated, to maintain best results. When used with the Zerodur® calibra-tor, the QC10 ballbar measures the absolute radius of a tool path. The QC10 ballbar system provides you with a quick and effective solution to evaluate machine performance, and helps you to improve it through targeted maintenance.Styli and accessoriesTo maintain accuracy at the point of contact we recommend that you:Keep styli shortThe more that a stylus bends or deflects, the lower the accuracy. Probing with the minimum styluslength for your application is the best option.Minimise jointsEvery time you join styli and extensions, you introduce potential bending and deflection points.T ry, wherever possible, to keep to the minimum number of pieces for your application.Keep the ball as large as possibleThere are two reasons for this, firstly, it maximises your ball/stem clearance thereby reducing thechances for false triggers caused by ‘shanking out’ on the stylus stem; secondly, the larger ball reducesthe effect of the surface finish of the component being inspected.Renishaw has used its expertise in probe and stylus design to develop a comprehensive range of CMM and machine tool styli to offer the greatestpossible precision.The genuine Renishaw stylus range comprises several types:Star, disc and straight styli, short and long, extensions, complete stylus kits andcrash protection devices.If you cannot achieve your objectives using our extensive range of standardproducts, Renishaw’s Styli and Custom Products Division offers a unique service by providing customers with a total solution for their probing needs for CMM, machinetool or scanning applications.30NotesService and supportRenishaw recognises the value of good support and offersmany different options which are available through our international offices. We aim to keep you operational, with arapid response to your needs.UpgradesOne alternative with worn out, damaged or obsolete product is to upgrade to amore modern equivalent. Where this is possible, the option will always beoffered to you when contacting us.RepairsThere are several levels of repair, so if your equipment only has a minor fault,you only pay a minor charge. However, all repaired items have to pass thesame stringent final tests as new equipment.RBE (Repair by exchange)If damage is beyond economical repair, or immediate despatch is required, wehave stocks of service exchange items (RBEs). These items have also passed the stringent ‘as new’ final tests, and have been subject to a complete refurbishmentwith the replacement of all parts subject to wear regardless of their condition.A fully refurbished RBE item is very competitively priced, reflecting our commitmentto existing users.32Pocket guide to probes for CNC machine tools Printed in England 0508 UK Part No. H-2000-3006-04©2008 Renishaw plc. All rights reserved.RENISHAW® and the probe emblem used in the RENISHAW logo are registered trademarks of Renishaw plc in the UK and other countries. apply innovation is a trademark of Renishaw plc.For worldwide Renishaw contact information please visit/contactRenishaw plcNew Mills, Wotton-under-Edge,Gloucestershire GL12 8JRUnited Kingdom T +44 (0) 1453 524524 F +44 (0) 1453 524901 E ***************。
雷尼绍CARTO Explore(数据浏览)使用指南说明书

#雷尼绍本页空白。
目录法律信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4主界面. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5打开测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5查看旧版数据. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 ANGST. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5导入程序. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6还原 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 XK10激光校准仪分析. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6测试一览表界面 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7测试一览表. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8搜索 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8顺序 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8导出为CSV文件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8导出测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8导出传输文件/导入传输文件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8导出所有测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8删除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9刷新结果. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9查看所选测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9标记 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10单位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10应用 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10角度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10报告 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11高级配置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11帮助改进CARTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11通知 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11数据回看和分析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12测试浏览器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12分析 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12曲线图选项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13分析功能高亮显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13图形交互. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13比较 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15零点偏置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16应用“零点偏置”. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16还原为原始设置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16数据剪切选项. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16误差可视化(仅限XM测试) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16偏置读数(仅限XM测试) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16创建报告. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17复制和粘贴. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17创建PDF文件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17综合报告. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17误差补偿. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18保存配置设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19加载配置设置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19在Explore中查看误差补偿文件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19保存误差补偿文件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19法律信息条款、条件和保修除非您和Renishaw达成并签署单独的书面协议,否则此等设备和/或软件应根据设备和/或软件随附的Renishaw标准条款和条件出售,或者您也可以向当地的Renishaw分支机构索取前述的Renishaw标准条款和条件。
雷尼绍测头袖珍指南说明书
CNC 工具機測頭袖珍指南解決方案提升工件品質和精確度,提高 加工中心機的效率CNC 工具機測頭解決方案...袖珍指南內容本袖珍指南完整地介紹了 Renishaw 公司為 CNC 工具機而設計的主要產品,協助您加瞭解測頭量測可以為您帶來的營運效益。
“使用 Renishaw 公司提供的創新解決方案,可以縮短最多達90%的 設定時間”為什麼要使用測頭? 1使用 Renishaw 測頭量測系統的預期效益 3工件設定工件檢測刀具設定和破損刀具檢測功能強大的 PC-based 工件量測軟體支援巨集程式之測頭量測軟體產品/應用指南 5為什麼要使用測頭?時間就是金錢。
與其花時間人工手動設定工件位置和檢驗成品尺寸,不如將時間花在加工工作上。
Renishaw 測頭量測系統,可消除因手動設定及檢驗所造成的代價高昂的機器停機和工件報廢。
機器只有在持續生產良好品質的工件下,才是在創造利潤。
你有因停機而無法獲利的問題嗎?為什麼你大部分的機器會閒置達數小時?道理很簡單。
因為許多公司仍然使用人工手動方式來設定刀具和工件,並且使用機外檢驗的方式來進行加工成品尺寸之檢驗 — 兩者都是造成寶貴設備閒置的重要因素。
減少停機時間和廢品 — 增加機器加工時間和工件精度手動刀具設定、工件設定和檢測既耗時,又容易產生人為疏失。
直接在線上進行測頭量測,便不需要再使用外部的刀具設定儀、昂貴的夾治具和以槓桿千分錶進行手動設定。
線上測頭量測既快速且可靠,並且可以自動補正機械座標偏移量。
測頭量測軟體會自動對刀具長度和直徑、工件位置以及尺寸誤差進行補償。
Renishaw公司配備功能強大的套裝軟體,使用容易編輯的巨集程式進行刀具設定、工件設定和工件量測。
這些測頭量測循環程式,係依據工業標準格式編輯而成,可簡單地整合到加工程式中,並可使用標準機器程式代碼來呼叫使用。
Renishaw 公司的測頭普遍為世界各地的公司所採用,作為提升生產效率和改善工件品質的方法。
雷尼绍 H-5514-8204-01-A OTS光学对刀测头 规格手册

弱保护组件
A-5003-5171
测针保护组件包括:弱保护杆 (x1)、柔性连接片 (x1)、支撑杆 (x1)、 M4螺钉 (x2)、M4锁紧螺钉 (x3)、六方扳手:2.0 mm (x 1)、3.0 mm (x 1) 和扳手5.0 mm (x 1)。
测针架组件
A-2008-0389
测针架组件包括测针架和螺钉。
½ AA电池
P-BT03-0007
两节装½ AA锂亚硫酰氯 (LTC) 电池。
AA电池
P-BT03-0005
1节AA碱性电池(需要两节)。
AA电池
P-BT03-0008
½ AA锂亚硫酰氯 (LTC) 电池 -(两节装)。
电池盖
A-5401-0301
OTS电池盖组件。
密封条
A-4038-0301
电池座密封条。
光学传输开启模式
OTS的出厂设置为测头2(主轴测头的出厂设置为测头1)。
接口兼容性
OMI-2T/OMI-H 测头1和测头2开启。 允许一台机床上配两个测头。
OMI-2
测头1开启。 允许一台机床上配一个测头。 使用OMI-2时,将OTS配置为测头1开启。
在调制模式下OTS可与OMI-2T/OMI-2H/OMI-2兼容,具有很强 的抗光干扰能力。
如果对面的锥形光束总是重叠,而且发射器和接收器在其他的 视场(瞄准线),OTS和OMI-2T/OMI-2H/OMI-2可能会偏离光 学中心线。
机床上的自然反射面可能扩大信号传输范围。
注:单个OTS(配置为测头1)可配用 OMI-2(配置为使用水平开启输入)
45°
30°
15°
60°
75° 5 4 3 2 1
OTS (½ AA电池)
雷尼绍XL80激光干涉仪操作手册

镭射干涉仪操作手册手册内容一.RENISHAW 公司简介 1二.镭射干涉仪原理 2(1)波的速度 3(2)干涉量测原理 3(3)镭射干涉仪 4(4)镭射干涉仪一般量测项目 4三.注意事项 5四.镭射干涉仪防止误差及保养 5(1)镭射干涉仪防止误差 5(2)镭射干涉仪保养方法 6五.安全及注意事项 6六.镭射光原理及特性7七.镭射硬件介绍8八.镭射架设流程图15九.定位量测原理及操作16(1)线性定位量测原理16(2)量测方式17十.镭射易发生之人为架设误差20(1)死径误差20(2)余弦误差21(3)阿倍平移误差21 十一.镭射操作之步骤22(1)软件安装之步骤22(2)执行量测软件22(3)定位量测硬件架设之操作23(4)镜组架设前之注意事项24(5)镜组架设之步骤24 十二.定位量测之程序范例29 十三.定位量测之软件操作步骤30 热漂移量测38 快速功能键44 十四.动态软件量测之操作45(1)动态量测硬件之架设45(2)执行量测之软件46(3)位移与时间48(4)速度与时间49(5)加速度与时间50 十五.角度量设之操作52(1)注意事项52(2)镜组架设的种类53(3)镜组架测之步骤54(4)角度量测之软件操作步骤57 十六.RX10旋转轴之量测62(1)说明62(2)硬件配件之介绍62(3)硬件操作之步骤64(4)软件操作之步骤67 十七.直度量测之操作75(1)直度之分类75(2)直度量测之硬件架设75(3)镜组架设之步骤75(4)直度软件之操作步骤80 十八.Z轴直度镜组织架设方法85 十九.垂直度量测之操作89(1)垂直度镜组架设之步骤89(2)软件操作之步骤95 二十.平面度量测之原理与操作101(1)硬设备101(2)操作之原理102(3)镜组架设之步骤102(4)软件操作之步骤110。
雷尼绍使用手册
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
雷尼绍XL80激光干涉仪操作手册汇总
雷尼绍XL80激光干涉仪操作手册汇总镭射干涉仪原理镭射干涉仪是利用光的干涉原理来进行测量的仪器。
其原理包括波的速度、干涉量测原理和镭射干涉仪的概念。
通过镭射干涉仪进行量测可以得到高精度的数据。
注意事项在使用镭射干涉仪时,需要注意一些事项,以保证测量的准确性。
例如,需要避免震动和光源的干扰。
同时,还需要注意仪器的保养和维护。
镭射干涉仪防止误差及保养为了保证镭射干涉仪的测量准确性,需要注意防止误差的产生。
其中包括死径误差、余弦误差和阿倍平移误差等。
此外,还需要进行仪器的保养和维护,以延长其使用寿命。
安全及注意事项在使用镭射干涉仪时,需要注意安全问题。
例如,需要避免直接观察镭射光线,以免对眼睛造成伤害。
同时,还需要注意仪器的保护,避免损坏。
镭射光原理及特性镭射光具有高度的单色性和相干性,可以用于进行高精度的测量。
镭射光的特性还包括方向性、激光功率密度大等。
镭射硬件介绍镭射干涉仪的硬件包括光学元件、探测器等部分。
其中,镜组是非常重要的部分,需要进行精确的架设。
此外,还需要注意光源的选择和调节。
定位量测原理及操作定位量测原理包括线性定位量测原理和量测方式。
在进行定位量测时,需要注意仪器的硬件架设和软件操作。
其中,线性定位量测原理是常用的一种方法。
镭射易发生之人为架设误差在进行镭射干涉仪的架设时,容易发生人为误差。
其中包括死径误差、余弦误差和阿倍平移误差等。
需要注意这些误差的产生,并进行相应的纠正。
镭射操作之步骤在进行镭射干涉仪的操作时,需要遵循一定的步骤。
包括软件安装、执行量测软件、定位量测硬件架设之操作、镜组架设前之注意事项和镜组架设之步骤等。
定位量测之程序范例定位量测的程序范例可以帮助用户更好地了解仪器的使用方法。
通过程序范例的研究,可以更加熟练地掌握仪器的操作技巧。
定位量测之软件操作步骤在进行定位量测时,软件操作也是非常重要的一部分。
需要注意软件的安装和使用方法,以保证测量的准确性。
热漂移量测热漂移量测是一种常见的测量方法,可以用于测量物体在温度变化下的形变情况。
雷尼绍 RGH34 光栅系统 规格手册说明书
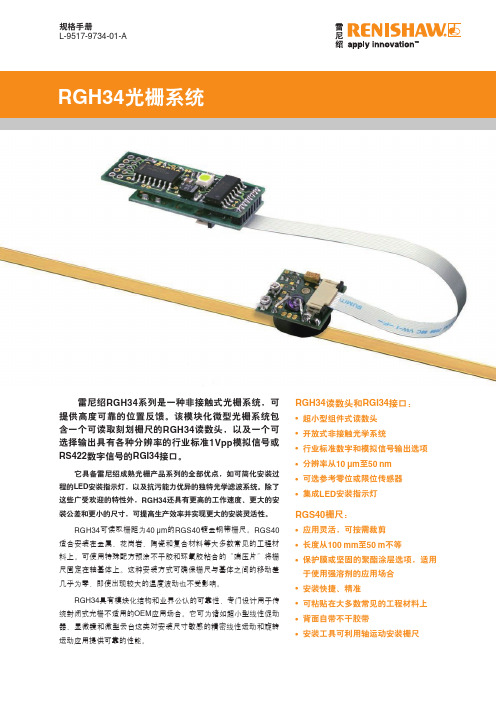
L-9517-9734-01-ARGH34读数头和RGI34接口:• 超小型组件式读数头• 开放式非接触光学系统• 行业标准数字和模拟信号输出选项• 分辨率从10µm 至50nm • 可选参考零位或限位传感器• 集成LED 安装指示灯RGS40栅尺:• 应用灵活,可按需裁剪• 长度从100mm 至50m 不等• 保护膜或坚固的聚酯涂层选项,适用于使用强溶剂的应用场合• 安装快捷、精准• 可粘贴在大多数常见的工程材料上 • 背面自带不干胶带• 安装工具可利用轴运动安装栅尺雷尼绍RGH34系列是一种非接触式光栅系统,可提供高度可靠的位置反馈。
该模块化微型光栅系统包含一个可读取刻划栅尺的RGH34读数头,以及一个可选择输出具有各种分辨率的行业标准1Vpp 模拟信号或RS422数字信号的RGI34接口。
它具备雷尼绍成熟光栅产品系列的全部优点,如可简化安装过程的LED 安装指示灯,以及抗污能力优异的独特光学滤波系统。
除了这些广受欢迎的特性外,RGH34还具有更高的工作速度、更大的安装公差和更小的尺寸,可提高生产效率并实现更大的安装灵活性。
RGH34可读取栅距为40µm 的RGS40镀金钢带栅尺。
RGS40适合安装在金属、花岗岩、陶瓷和复合材料等大多数常见的工程材料上。
可使用特殊配方预涂不干胶和环氧胶粘合的“端压片”将栅尺固定在轴基体上。
这种安装方式可确保栅尺与基体之间的移动差几乎为零,即使出现较大的温度波动也不受影响。
RGH34具有模块化结构和业界公认的可靠性,专门设计用于传统封闭式光栅不适用的OEM 应用场合。
它可为诸如超小型线性促动器、显微镜和微型云台这类对安装尺寸敏感的精密线性运动和旋转运动应用提供可靠的性能。
尺寸和公差(单位 mm )RGH34读数头安装图*从栅尺表面测得的尺寸。
(扭摆公差±1°)该视图未包含支架性能FPC 电缆至RGH34可选长度:50、100和尺寸和公差(单位 mm )RGI34接口图通用规格电源 5 V ±5%120 mA注:电流消耗数字指的是无端接的RGI34接口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷尼绍中文说明书 山善(上海)贸易有限公司技术部一. 雷尼绍测头的标定:测头标定是矫正测头球相对主轴中心线的偏差和测头的长度误差以及探针球的半径误差。
1在以下几种情况下需要标定测头: a 第一次使用测头时。
b 测头上安装了新的探针。
c 怀疑探针弯曲或测头发生碰撞时。
d 周期性地进行标定以补偿机床的机械变化误差。
e 如果测头柄的重新定位的重复性差。
2 将已知内孔经的Master (随测头一起标定用的标准块)置于工作台且靠近主轴的一边。
a. 如图一所示用千分表将Master 沿着X 方向拉平后水平的固定在台 面上;b. 用千分表找正Master标位置(将其置于G54X- Y-中); c.在主轴上安装验棒(Testbar),移动 Z 轴并用块规测量master 的位置如图二所示 d.使w 轴在原点位置,譬如 Testbar 长度=350.311mm块规长度=30.00mm此时Z轴机械坐标为-1148.291mm (图一)(图二) e.设定标定时用的工件坐标系Z=-1148.291+(-30.0)+(-350.311)=-1528.602mm(将其置于G54Z--)f.执行T1M06(因为预先设定T01为测头专用);g.将测头安装到主轴上,擦干净测球并用千分表测量测球的跳动,如果跳动大需要重新调整(测头柄上四个方向均有调整螺丝);h.测头每次安装到主轴孔内时必须一致即不能旋转180度再安装,为了避免误差;3.完整标定测头需要O9801、O9802及其O9803或者O9804程序 标定程序依次说明:1.(O9801)测头长度的标定:格式如下:G65P9801Zz Tt;例题:在G54工件坐标系中设置X、Y、Z的值;O0001G90G80G40G0G54X0Y0G43H01Z100. (因测头通常设定为T01,激活1号补正,定位到100mm处) G65P9832 (旋转开启测头包含主轴定位)G65P9810Z10.F3000(保护定位移动)G65P9801Z0T1 (Z向标定,T1表示刀补号码)G65P9810Z100 (保护定位移动到Z100.0处)G65P9833 (旋转关闭测头)G28Z100. (参考点返回)H00 (取消刀补)M302(O9802)标定探针的X、Y方向偏心:格式:G65P9802Dd Zz上述D是表示标准块的内径值,当使用凸台标定时要使用Zz,省略时表示用孔来标定。
以下为存储数据00002G90G80G40G0G54X0Y0G43H1Z100.G65P9832(ON)G65P9810Z-5.0F3000G65P9802D50.0G65P9810Z100.0F3000G65P9833(OFF)G28Z100.0H00M303 标定测头球的半径(O9803):格式:G65P9803Dd{Zz Ss}备注:D:表示环规的内径尺寸;Z:用外圆标定时Z轴的绝对测量位置,不设定时表示用环规标定S:工件坐标系S1到S6表示G54到G59 S101到S148表示G54.1P1到G54.1P48测量后数据存储在以下宏变量中:#500=X+,X-,探针球的半径#501=Y+,Y-,探针球的半径O0003G90G80G40G00G65P9832 (旋转打开测头)G65P9803D50.001 (在内径为50.001的环规内标定)G65P9833 (旋转关闭测头)M30O0003G90G80G40G00G54X0Y0G43H1Z100.G65P9832 (旋转打开测头)G65P9810Z-5.F3000 (保护式定位到孔内-5.0处)G65P9803D50.001 (用内经为50.001的环规标定)G65P9810Z100.F3000(保护式定位绝对位置为100.0处)G65P9833 (旋转关闭测头)G28Z100.H00M306. (O9804)标定探针球的矢量半径注:如果要用矢量测量子程序O9821、O9822或者O9823,就必须使用该循环来标定探针球的半径。
不要用O9803这个程序来标定G65P9804Dd[Zz Ss]备注:D:标定的环规内经的大小;S:工件坐标系S1~S6(G54~G59)S101~S148(G54.1P1~G54.1P48)Z:使用外圆表示时Z轴的位置,环规标定时省略不要;O0004G65P9832 (旋转打开测头)G65P9804D50.001(标定内经为50.001的环规)G65P9833 (旋转关闭测头)M30O0003G90G80G40G00G54X0Y0G43H1Z100.G65P9832 (旋转打开测头)G65P9810Z-5.F3000 (保护式定位到孔内-5.0处)G65P9804D50.001 (用内经为50.001的环规标定)G65P9810Z100.F3000(保护式定位绝对位置为100.0处)G65P9833 (旋转关闭测头)G28Z100.H00M30《以上标定可以综合使用以下的任意一个程序来完成》a.使用内孔和表面的标定方法O0006;0.G90 G80 G40 G01. G54 X35.Y02 G43H01Z100.03.G65P9832 (旋转打开测头)4.G65P9810Z30.F3000 (保护移动到参考面上方)5.G65P9801Z20.00T1 (标定测头长度)6.G65P9810X0Y0 (保护移动到孔中央)7.G65P9810Z5. (保护移动到孔里面)8.G65P9802D50. (用孔径为50mm的孔标定)9.G65P9804D50.001 (用孔径为50.001mm的孔标定)10. G65P9810Z100.F3000 (保护返回到参考面上方)11. G65P9833 (旋转关闭测头)12.G28Z100.H00M30a.使用外圆和表面的标定方法例如也可以自己编写一个程序来标定O0500(BLOCK CARRY)G90G80G40G0G54X15.Y0W0B0G43H1Z100.M52 (探头打开)G4X1.S100M19G65P9810Z30.F1000(保护式定位移动)G65P9801Z0T1 (测头长度标定,Z为参考面位置,T1为激活1号刀补)G65P9810X0Y0 (定位到X0Y0位置)G65P9810Z-5. (定位到Z-5.0的位置)G65P9802D20.002 (标定探针X、Y方向的偏心,D为标定物的孔径)G65P9804D20.002 (标定探针球的矢量半径,D为标定物的孔径)/G65P9830K13. (K13多探针测头号码,K不同测量结果存储位置不一样)G65P9810Z100. (定位到Z100位置)G00G49Z300.M50二.测量部分1. 程序说明:a.探针标定程序O9801 :标定测头长度;O9802 :标定探针的X和Y向偏心;O9803 :标定探针球的半径(O9821~9823不可用)O9804 :标定探针球的矢量半径;b.测量循环程序O9810:保护定位(即移动中测头碰到时机床会停止);O9811:XYZ单一平面测量;O9812:凸台/凹槽测量O9814:内孔/外圆测量;O9815:内拐角测量;O9816:外拐角测量;c.矢量测量循环O9821:带角度的单一平面测量;O9822:带角度的凸台或凹槽的测量O9823:3点内孔或者外圆测量d. 附加循环O9817:测量点沿X分布的第四轴测量O9818:测量点沿Y分布的第四轴测量(方法同上O9817)O9819:PCD上的内孔/外圆测量O9820:毛坯余量测量;O9830:多探针数据存储O9831:多探针数据调用O9832:旋转开启测头;O9833:旋转关闭测头;O9834:测量XY平面内面到面之间的距离;O9834:测量XY平面内面到面之间的距离;O9835:SPC刀偏修正;O9843:X或者Y平面的角度测量2. 具体测量方法:a. 内孔/外圆的测量(O9814):G65P9814 Dd或者G65P9814 Dd Zz备注:D型面的直径; Z:测量外圆或者内部有障碍的孔时Z轴的绝对位置,如果省略Z,就会假定为一个内孔循环。
Rr写负数时表示内有障碍物.表示G55 b. 凸台/凹槽的测量(O9812)格式:G65p9812Xx或G65P9812Yy或G65P9812Xx Zz或G65P9812Yy Zz备注:X:沿着X方向测量时测量距离;:Y:沿着Y方向测量时测量距离;:Z:测量凸台或者内有障碍的槽时Z的绝对位置,如果缺省Z则表示测量一个凹槽;c.单一平面的测量(O9811)有以下两种可能性:1可以把平面看作一个尺寸与Tt和Hh相应的刀偏别更改;2可以把平面看作一个基准平面位置,通过Ss和Mm调整坐标系; 格式:G65 P9811Xx 或Yy 或Zzd.(O9815)内拐角测量;备注:如果省略I和J,那么只出现两次测量移动,并假定拐角平行于坐标轴;如果省略I或者J,那么出现三次测量移动并假定拐角是90度;格式:G65 P9815Xx Yy;e.(O9816)外拐角测量;格式:G65 P9816 Xx Yyf.(O9821)带角度的单一平面测定格式:G65 P9821 Aa Ddg.(O9822)带角度的凸台或者凹槽的测量格式:G65 P9822 Aa Ddh.(O9823)3点内孔或者外圆测量格式:G65 P9823 Aa Bb Cc Dd或G65 P9823 Aa Bb Cc Dd Zzh.(O9817)测量点沿着X分布的第四轴测量坐标系设定Si.(O9843)X或者Y平面的角度测量格式:G65 P9843 Xx Dd 或者 G65P9843Yy Dd备注:j.(O9834):测量XY平面内型面到型面间的数据:测量Z平面间型面到型面的数据(1) O9834 :测量XY平面内型面到型面间的数据注:O9834 格式:G65 P9834 Xx或G65 P9834 Yy或G65 P9834 Xx Yy或G65 P9834 Aa Dd或G65 P9834备注:(2) O9834 : 测量Z平面间型面到型面的数据O9834 格式:G65 P9834Zz 或者G65 P9834Aa Zz或者G65 P9834Dd Zz或 G65 P9834 说明:必须输入部分:四.各个宏变量表示的含义输出变量---表一单一平面凸台/凹槽内孔/外圆内拐角外拐角第四轴 XY平面角度G65P9811 G65P9812 G65P9814G65P9815G65P9816G65P9817/18 G65P9845 #135 X位置X位置X位置X位置X位置#136 Y位置Y位置Y位置Y位置Y位置#137 Z位置#138 尺寸尺寸尺寸#139 X面角度X面角度第四轴角度角度#140 X偏差X偏差X偏差X偏差X偏差#141 Y偏差Y偏差Y偏差Y偏差Y偏差#142 Z偏差Y面角度Y面角度#143 尺寸偏差尺寸偏差尺寸偏差Y角度偏差Y角度偏差高度偏差高度偏差#144 X角度偏差X角度偏差角度偏差角度偏差#145 实际位置偏差实际位置偏差实际位置偏差实际位置偏差实际位置偏差#146 余量状况余量状况余量状况#147 方向指示器#148 超差标志(1到7)#149 测头误差标志(0到2)输出变量---表二PCD内孔/外圆毛坯余量带角度的平面带角度的凸台/凹槽3点内孔/外圆测量型面到型面G65P9819 G65P9820 G65P9821 G65P9822 G65P9823 G65P9817/34#135 X位置从起点开始的X位置X位置X位置X向增量距离#136 Y位置从起点开始的Y位置Y位置Y位置Y向增量距离#137 PCD Z向增量距离#138 尺寸从起点开始的尺寸尺寸尺寸最小距离#139 角度角度#140 X偏差X偏差X偏差X偏差X偏差#141 Y偏差Y偏差Y偏差Y偏差Y偏差#142 PCD偏差Z偏差#143 尺寸偏差尺寸偏差尺寸偏差尺寸偏差最小距离偏差#144 角度偏差最大值角度偏差#145 实际位置偏差最小值实际位置偏差实际位置偏差实际位置偏差实际位置偏差#146 余量状况变动量(毛坯) 余量状况余量状况余量状况余量状况#147 孔的编号方向指示器#148 超差标志(1到7)#149 测头错误标志(0到2)。