sugeno模糊模型的基本概念
Mamdani与Sugeno型模糊推理的应用研究_钟飞

第20卷第2期湖 北 工 业 大 学 学 报2005年04月Vol.20No.2 Journal of Hubei University of Technology Apr.2005[收稿日期]2004-11-11[基金项目]国家自然科学基金项目(50375047).[作者简介]钟 飞(1970-),男,湖北武汉人,湖北工业大学讲师,工学硕士,研究方向:智能控制与检测.[文章编号]1003-4684(2005)04 0028 03M amdani 与Sugeno 型模糊推理的应用研究钟 飞,钟毓宁(湖北工业大学机械工程学院,湖北武汉430068)[摘 要]从模糊控制系统中M amdani 和Sug eno 两种模糊推理模型的结构着手,对其输入输出变量的形式和在模糊控制中的作用,以及两种模糊推理的推理结果和适用范围进行比较和分析.利用M atlab 中Fuzzy 工具箱的计算和图形化功能,通过实例进一步验证两种系统的优缺点和适用范围,为模糊控制器设计的模糊推理类型的选用提供方法.[关键词]模糊控制;M amdani 模糊推理;Sugeno 模糊推理;隶属函数[中图分类号]T P 13[文献标识码]:A模糊推理是指根据模糊输入和模糊规则,按照确定好的推理方法进行推理,得到模糊输出量.其本质上就是将一个给定输入空间通过模糊逻辑的方法映射到一个特定的输出空间的计算过程.最常见的模糊推理系统有3类:纯模糊逻辑系统、高木关野(Takagi Sugeno)型和迈达尼(M amdani)型.由于纯模糊逻辑系统的输入和输出均为模糊集合,而现实世界大多数工程系统的输入与输出都是精确的,因此纯模糊逻辑系统不能直接应用于实际工程中.为解决这一问题,有关学者在纯模糊逻辑系统的基础上提出了具有模糊产生器和模糊消除器的M am dani 型模糊推理系统,而日本学者T akagi 和Suge no 则提出了模糊规则的后项结论为精确值的模糊逻辑系统,称为Sugeno 型模糊逻辑系统.1 Mamdani 模糊推理模型Mamdani 型的模糊推理方法最先将模糊集合的理论用于控制系统.它是由Ebrahim Mamdani 在1975年为了控制蒸汽发动机提出来的.这种方法源于Zadeh 关于模糊算法在复杂系统和决策处理中应用的思想[1],按照综合一系列有经验的操作者提供的线性控制规律来控制锅炉,M amdani 型模糊推理算法采用极小运算规则定义模糊蕴含表达的模糊关系,如规则R:If x is A then y is B.式中:x 为输入语言变量;A 为推理前件的模糊集合;y 为输出语言变量;B 模糊规则的后件.用Rc 表示模糊关系:Rc =A B =X YA (x )B (y )f (x ,y ).(1)当x 为A ,且模糊关系的合成运算采用 极大 极小 运算时,模糊推理的结论计算如下[2]:B =A Rc =Yx X( A (x ) ( A (x ) B (y )))/y.(2)工程应用中,往往期待推理输出的是一个确定的控制量或其他的确定数值,而应用M amdani 型的模糊推理系统,每一条规则推理后得到的输出是变量的分布隶属度函数或离散的模糊集合.在将多条规则的结果合成以后,对每一个输出变量模糊集合都需要进行解模糊化处理,以得到实际问题期望的输出.2 Sugeno 模糊推理模型Sugeno 模糊模型也称TSK 模糊模型,旨在开发从给定的输入输出数据集产生模糊规则的系统化方法.Sug eno 型模糊推理将去模糊化也结合到模糊推理中,其输出为精确量.这是由Sug eno 模糊规则的形式所决定的.在Sugeno 型模糊规则的后件部分讲述储量表示为输入量的线性组合.Sug eno 型模糊推理算法是最常用的模糊推理算法.Sug eno 型模糊推理算法与Mamdani 型类似,其中,输入量模糊化和模糊逻辑运算过程完全相同,主要差别在于输出隶属函数的形式.典型的零阶Sug eno 型模糊规则的形式如下:If x is A and y is B then z =k.式中:x 和y 为输入语言变量;A 和B 为推理前件的模糊集合;z 为输出语言变量;k 为常数.更为一般的一阶Sug eno 模型规则的形式为:if x is A and y is B then z =p x +qy +r.式中:x 和y 为输入语言变量;A 和B 为推理前件的模糊集合;z 为输出语言变量;p ,q,r 为常数.对于一个由n 条规则组成的Sug eno 型模糊推理系统,设每条规则具有下面的形式:Ri :If x is A i and y is B i then z =z i(i =1,2, ,n).则系统总的输出y =ni=1Ai(x ) Bi (y )z i /ni=1Ai(x ) Bi (y ).(3)由于高阶数的Sug eno 模型增加了复杂性,性能却改善不大,故很少使用.在M amdani 型模糊推理算法中,输出隶属函数是模糊集合,经过模糊合成处理,即得到一个需要逆模糊化的输出变量.当采用尖峰脉冲形隶属函数替代分布形隶属函数时,往往能使模糊推理过程有效简化,这就是所谓的单元素隶属函数.单元素隶属函数可以看作已预先逆模糊化处理的模糊集合.由于不需要像Mamdani 型模型那样计算二维函数的形心,可以极大地提高逆模糊化处理过程的效率[3].Sugeno 模型中即采用单元素输出隶属函数,其模糊蕴含即是简单的乘法,模糊合成即是各单元属输出隶属函数的简单包涵.3 Mamdani 和Sugeno 型模糊推理系统的仿真利用M ATLAB 提供的模糊工具箱,可以方便地实现M amdani 和Sugeno 型的模糊推理系统的设计.M amdani 型模糊系统的每一条推理规则的结论都是一个分布的模糊集合,但在许多问题中,如果每一条模糊规则的结论部分是论域上一个确定的单点而不是分布的模糊集合,可能会更加有效.这种单点可以看作是一个已经预先经过清晰化的模糊集合.因为这种方法可以提高清晰化的效率,极大地简化了通常Mamdani 型系统中的计算量.它采用部分数据点的加权平均求和代替二维的积分计算来求取二维函数的质心.而这种单点模型是Sugeno 型系统所支持的.通常,Sugeno 型系统推理规则的结论部分是关于输入的线性函数或常值函数的[4].下面对具有相同输入和不同输出的M amdani 和Sugeno 模糊模型进行仿真比较.一个具有4条规则的两输入单输出M amdani 模糊模型的例子可以表示为:如果x 小,且y 小则z 小;如果x 小,且y 大则z 较小;如果x 大,且y 小则z 较大;如果x 大,且y 大则z 大.一个具有四条规则的两输入单输出Sug eno 模糊模型的例子可以表示为:如果x 小,且y 小则z =-x +y +2;如果x 小,且y 大则z =y -3;如果x 大,且y 小则z =-x +1;如果x 大,且y 大则z =x -y +1.采用Matlab 的Fuzzy 工具箱进行仿真,其中两种推理模型的输入相同,其隶属度函数见图1和图2.由于M amdani 模糊模型为模糊输出,其输出的隶属度函数见图3.根据给出规则建立规则库,图4和图5为两种模糊推理的规则库图解.图6和图7为两种模糊推理的输入输出曲面.第20卷第2期 钟 飞等 M4 结论以上的仿真可见Mam dani 型模糊推理和Sug eno 型模糊推理各有优缺点.M amdani 型模糊推理,由于其规则的形式符合人们思维和语言表达的习惯,因而能够方便地表达人类的知识,但存在计算复杂、不利于数学分析的缺点;而Sugeno 型模糊推理则具有计算简单,利于数学分析的优点,易于与PID 控制方法以及优化、自适应方法结合,是具有优化与自适应能力的控制器或模糊建模工具,是基于样本的模糊建模中最常选用的方法.[ 参 考 文 献 ][1] 刘曙光.模糊控制技术[M ].北京:中国纺织出版社,2001.[2] 诸 静.模糊控制原理与应用[M ].北京:机械工业出版社,2001.[3] 边润强.一种基于Sigeno 模糊模型的测量数据处理方法[J].2001,22(3):318-320.[4] 徐 昕.M atL ab 工具箱应用指南:控制工程篇[M ].北京:电子工业出版社,2000.The Application Research of Mamdani andSugeno Style Fuzzy InferenceZH ONG Fei,ZH ONG Yu ning(S chool of Mechanical Eng ine.,H ubei Univ.of Technology ,Wuhan 430068,China)Abstract:Beg inning w ith the structur es o f Mamdani and Sug eno fuzzy inference modeling in fuzzy contro l system ,the com pariso n is m ade in the fo rm of their input and output var iables,their function in fuzzy con tro l,and their inference results and application fields.By m eans of the computation and g raphics function of the Fuzzy too lbox in Matlab,the tw o systems'advantages and disadvantag es and application scope are further validated.T his ar ticle presents the method of choosing the ty pe of fuzzy inference designed by fuzz y contr oller.Keywords:fuzzy contr ol;mamdani fuzzy infer ence;sugeno fuzzy inference;membership function[责任编辑:张 众]30湖 北 工 业 大 学 学 报2005年第2期。
模糊推理T-S解析

matlab中sugeno常用的去模糊化函数为:wtaver(加权取平 均)和wtsum(加权求和)
对y=x2进行拟合
• 在matlab编辑窗口,中输入fuzzy或者在左下角找到star按 钮找到
• FIS模糊控制工具箱 • 在file中选到fis——sugeno用T—S模型对y=x2进行拟合
• 前面选择了5条高斯函数对论域进行分段,对输出y也就有 5条直线进行拟合:
• y1=4x
[4 0]
• y2=6x-8
[6 -8]
• y3=10x-24
[10 -24]
• y4=14x-48
[14 48]
• y5=18x-80
[18 -80]
• 中括号中的数为Params对应yi的系数
点击edit—Rules添加模糊规则
点击input,将name改成x,点击output改成y,在file中选择 export to workspace保存为quater
在edit中选择x的隶属度函数为gaussmf(选择条数为5),并设置range 为【0 10】点击左边黄色的x,选中每一天高斯曲线,将名字改成如下;
点击右边的y对输出进行设置,首先将输出变量名字 改成如图中所示。然后选择Type为linear对Params 进行设置,这是T-S模型需要的拟合直线系数
关于T-S推理
简介
• T-S模型是Takagi和Sugeno提出的非线性复杂系统模糊建 模中的一种典型的模糊动态模型:
• 其前提部是依据系统输入、输出间是否存在局部线性 关系来进行划分;
• 其结论部是由多项式线性方程来表达,从而构成各条 规则间的线性组合。
Sugeno模糊模型

其中: A1 、 A2 ----F集合
k、p、q、r----常数(根据系统的大量输入-输出数据,经过辨识确 定的)
⑵计算系统输出U的两种方法
用n条模糊规则描述系统时,假设一组具体输入的数据xi,它一般会 与多个F集合相关,设激活了m条模糊规则,即 0阶T-S型模糊推理:Ri: if x1 is A1i and x2 is A2i ,then ui=ki 1阶T-S型模糊推理: Ri: if x1 is A1i and x2 is A2i ,then ui=pix1+qix2+ri (i=1、2、3……n) 当xi激活m条模糊规则时,输出结论将由这m条规则的输出ui决定。
2012-10-15
上海应用技术学院 2013研智能控制
MF Degree of input 1
1 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 x 3 3.5 4 4.5 5 little big
MF Degree of input 2
1 0.8 0.6 0.4 0.2 0 0 1 2 3 4 5 x 6 7 8 9 10 little big
2012-10-15
7.2 仿真实例 取倒立摆参数
x2
m 2kg M 8kg l 0.5m
, ,
。令
,
x1 则倒立摆的动力学方程可表示为如下状态方程: x
= Ax Bu x
0 。 B 0 . 0811
其中 A
0 1 , 15 . 8919 0
U
wu
i 1 m
m
i i
w
i 1
i
w1u1 w2u2 ...... wmum w1 w2 ...... wm
模糊t-s型系统课件

规则库的建立
根据确定的模糊规则,建立模糊规则 库,包括规则的前提和结论部分。
模糊逻辑推理过程
输入变量的模糊化
将输入变量的精确值转换为模糊集合。
结论推理
根据匹配的模糊规则,进行结论推理,得到 输出变量的模糊集合。
匹配模糊规则
根据输入的模糊集合,匹配模糊规则库中的 模糊规则。
结论与展望
模糊T-S型系统的优势与局限性
01
优势
02
具有较强的鲁棒性和适应性,能够处理不确定性和非线性问题。
能够模拟人类推理过程,实现更接近人类的决策和控制。
03
模糊T-S型系统的优势与局限性
01
局限性
02
对初始条件和参数变化敏感,可能导致系统 性能不稳定。
03
设计和调整过程较为复杂,需要专业知识和 经验。
模糊T-S型系统课件
• 引言 • T-S型模糊逻辑系统的结构 • 模糊T-S型系统的应用 • 模糊T-S型系统的实现 • 结论与展望
01
引言
模糊逻辑与模糊系统简介
01
模糊逻辑是一种处理不确定性、 不完全性知识的工具,它突破了 经典逻辑的局限性,能够更好地 处理现实世界中的复杂问题。
02
模糊系统是基于模糊逻辑的系统 ,它通过模糊化输入和输出,将 不确定性和不精确性引入系统, 从而更好地适应复杂环境。
THANKS
感谢观看
T-S型模糊逻辑系统的基本概念
T-S型模糊逻辑系统是一种常见 的模糊逻辑系统,它由输入变量、 模糊化函数、规则库和去模糊化
函数组成。
T-S型模糊逻辑系统的名称来源 于其创始人,日本学者Tokyo大 学的Sanada教授和Sugeno教
第一章模糊集的基本概念
6.集合的运算规律
幂等律: A∪A = A, A∩A = A; 交换律: A∪B = B∪A, A∩B = B∩A; 结合律:( A∪B )∪C = A∪( B∪C ), ( A∩B )∩C = A∩( B∩C ); 吸收律: A∪( A∩B ) = A,A∩( A∪B ) = A; 分配律:( A∪B )∩C = ( A∩C )∪( B∩C ); ( A∩B )∪C = ( A∪C )∩( B∪C ); 0-1律:A∪U = U , A∩U = A ; A∪ = A , A∩ = ; 还原律: (Ac)c = A ; 对偶律: (A∪B)c = Ac∩Bc,(A∩B)c = Ac∪Bc; 排中律: A∪Ac = U, A∩Ac = .
§1.2 模糊理论的数学基础
一 经典集合
1.经典集合具有两条基本属性:
元素彼此相异,即无重复性;范围边界分明, 即一个元素x要么属于集合A(记作xA),要么不属 于集合(记作xA),二者必居其一. 2.集合的表示法 (1)枚举法,A={x1 , x2 ,…, xn}; (2)描述法,A={x | P(x)}.
记R=(rij)n×n, R2 =(rij(2))n×n.
先设R具有传递性.
若rij(2) =0,则有rij(2) ≤ rij .
若rij(2) =1,则由于
rij(2) = ∨{(rik∧rkj) | 1≤k≤n} = 1,
故存在1≤s≤n,使得
(ris∧rsj) = 1,
即ris= 1, rsj= 1.
由于R具有传递性,ris= 1, rsj= 1, 则rij =1. 综上所述 R2≤R. 再设R2≤R,则对任意的 i , j , k,若有 rij =1, rjk = 1,
2.关系的三大特性 定义9 设R为 X 上的关系 (1) 自反性:若 X 上的任何元素都与自己有关 系R,即R (x , x) =1,则称关系 R 具有自反性; (2) 对称性:对于X 上的任意两个元素 x , y, 若 x 与y 有关系R 时,则 y 与 x 也有关系R,即 若R (x , y ) =1,则R ( y , x ) = 1,那么称关系R具 有对称性; (3) 传递性:对于X上的任意三个元素x, y, z, 若x 与y 有关系R,y 与z 也有关系R 时,则x与z 也 有关系R,即若R (x , y ) = 1,R ( y , z ) =1,则R ( x , z ) = 1,那么称关系R具有传递性.
模糊控制3 TS Fuzzy System
x(k + 1) = ∑ w Ai x(k ) / ∑ w
i i =1 i =1
l
l
i
图5 模糊系统的响应曲线
22
[例5]在上述已知模糊系统中,如果
1.503 −0.588 A1 = 1 0
1 −0.361 A2 = 1 0
S 22:若y(k)是( A2 and C 2 ),则
2 y 22 (k + 1) = (2.256 − 1.120k12 ) y (k ) + (−0.361 − 1.120k 2 ) y (k − 1)
模糊模型的总的输出为
w11 y11 (k + 1) + w12 y12 (k + 1) + w21 y 21 (k + 1) + w22 y 22 (k + 1) y (k + 1) = 17 w11 + w12 + w21 + w22
27
[例6]对于例2中的模糊系统,加入了标准方差为0.5的高斯白噪声, 并假定模型的前提结构和前提参数同原系统相同。采用200组输 入输出数据进行结论参数的辨识,得到如下结果:
28
图8绘出了含有噪声的输入输出数据、原始的结论和辨识 结论。如果这组数据中不含有噪声,那么辨识出来的模 型和原模型完全相同。
图8 原始数据和辨识的结果
29
2、前提参数的辨识
模糊辨识算法中,涉及到3类隶属函数,都是由分段直线组 成的。它们是small, medium, large如下图所示。
图9 3类隶属函数的形式 图9中的 P1 , P2 , , P8 等是前提参数,表示各类隶属函数的 转折点,对应的隶属度是1或0,模糊子集small和large有 2个前提参数待辨识,medium有4个前提参数待辨识。
模糊控制matlab
模糊控制matlab模糊控制是一种基于模糊数学理论的控制方法,它可以有效地处理非线性系统和模糊系统的控制问题。
在模糊控制中,通过将输入、输出和中间变量用模糊集合表示,设计模糊逻辑规则以实现控制目标。
本文将介绍如何用Matlab实现模糊控制,并通过实例讲解其应用和效果。
1. 模糊集合的表示在Matlab中,我们可以使用fuzzy工具箱来构建和操纵模糊系统。
首先,我们需要定义输入和输出的模糊集合。
例如,如果我们要控制一个直线行驶的自动驾驶汽车,可以定义速度和方向作为输入,定义方向盘角度作为输出。
我们可以将速度和方向分别划分为缓慢、中等、快速三个模糊集合,将方向盘角度划分为左转、直行、右转三个模糊集合。
可以使用Matlab的fuzzy工具箱中的fuzzy集合函数实现:slow = fuzzy(fis,'input',[-10 -10 0 20]);gap = fuzzy(fis,'input',[0 20 60 80 100]);fast = fuzzy(fis,'input',[60 80 110 110]);其中,fis为模糊系统对象,输入和输出的模糊集合分别用fuzzy函数定义,分别用输入或输出、模糊集合变量名、模糊集合界限参数表示,如fuzzy(fis,'input',[-10 -10 0 20])表示定义一个输入模糊集合,变量名为slow,其界限参数为[-10 -10 0 20],即表示此模糊集合上下界是[-10,-10]和[0,20]。
2. 设计模糊控制规则在Matlab中,可以使用fuzzy工具箱的ruleviewer函数来设计模糊控制的规则库。
规则库由模糊条件和模糊结论构成,用if-then形式表示。
例如,定义类别均为slow和keep的输入,输出为类别均为left的控制操作的规则如下:rule1 = "if (slow is slow) and (keep is keep) then (left is left);";其中,slow和keep为输入的模糊变量名,left为输出的模糊变量名。
基于Takagi-Sugeno模糊模型的模糊控制
天津大学硕士学位论文基于Takagi-Sugeno模糊模型的模糊控制姓名:徐妮妮申请学位级别:硕士专业:控制理论与控制工程指导教师:高志伟2002.1.1112陟乒TS模糊模型可以很好地逼近非线性系统,其予模型采用线性动态方程易于用现代控制理论的方法进行分析和控制器的设计。
本文的工作是围绕TS模糊模型展开的。
首先对以往的模糊系统的稳定性分析和模糊控制器的设计成果进行了回顾。
接下来,文中重点讨论了一般模糊系统的模糊控制器的设计和模糊状态观测器的设计。
得出用模糊状态观测一控制器实现的闭环模糊系统的稳定性定理。
文中提出了模糊状态观测器和模糊控制器的相对分离性设计。
仿真结果验证了结论的正确性。
文中通过扩展Ts模糊模型定义了模糊广义系统。
讨论了模糊广义系统的模糊状态观测一控制器的设计。
同样,模糊广义系统的模糊状态观测器和模糊控制器也具有设计的相对分离性。
关键词:Ts模糊模型,模糊控制器,模糊状态观测器,模糊广义系统AbstractThispaperconcentratesontheTSfuzzymodel.ThefuzzymodelproposedbyTakagiandSugenoisdescribedbyfuzzyIF-THENrule,whichrepresentlocallinearinput—outputrelationsofanonlinearsystem.Tobeginwitll.TSfuzzymodelandpreviousstabilityresultsarerecalled.ThenextsectionaddressestheanalysisanddesignofthefuzzycontrollerandthefuzzyobserveronthebasisoftheTSfuzzymodel.Thestabilityconditionfortheclosed-loopsystemisderived,whichshowsthatthefuzzycontrollerandthefuzzyobserverCanbedesignedindependentlywitllsomeconstrains.Thenumericalsimulationonallinvertedpendulumsystemisgiventoillustratetheperformanceoftheclosed-loopsystem.FinallyafuzzydescriptorsystembyextendingtheordinaryTSfuzzymodelisdefined.Thefuzzycontrollerandthefuzzyobserverofthefuzzydescriptorsystemarediscussed.Fourkindsofstabilityconditionsarederived.Simulationresultshowstheutilitiesofthosestabilityconditions.Keywords:TSfuzzymodel,fuzzycontroller,fuzzyobserver,fuzzydescriptorsystem第一章绪论第一章绪论§1.1模糊控制系统近年来的研究与发展美国加利福尼亚大学L.A.Zadeh教授在1965年提出的{FuzzySet>)【1】开创了模糊控制的历史,从此模糊数学科学发展起来了。
7.2-Sugeno模糊模型建模及控制

9
10
9
10
Degree of membership
1
ZR
0.8
0.6
Hale Waihona Puke 0.40.20
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 x
1
ZR
0.8
0.6
0.4
0.2
0
-3
-2
-1
0
1
2
3
dx
Degree of membership
图4 倒立摆的摆角、角速度隶属函数
仿真设计: 根据上述规则设计一个二输入、单输出的
Sugeno模型,可观察到输入输出隶属函数曲线。 仿真结果如图1和图2所示。
仿真程序:chap7_3.m
MF Degree of input 1
1
0.8 little
big
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x
1
0.8 little
big
0.6
0.4
0.2
0
0
1
2
3
4
5
6
7
8
9
10
x
MF Degree of input 2
图1 Sugeno模糊推理系统的输入隶属函数曲线
Z
10
5
0
10
5
5
4 3
2
Y
00
1
X
图2 Sugeno模糊推理系统的输入/输出曲线
模糊控制的理论基础2

拉氏反变换的定义
其中L-1为拉氏反变换的符号。
指数函数的拉氏变换
三角函数的拉氏变换
(尤拉公式)
单位脉冲函数拉氏变换
洛必达法则
单位阶跃函数的拉氏变换
单位速度函数的拉氏变换
斜坡函数
单位加速度函数拉氏变换
抛物线函数
幂函数的拉氏变换
2.2.3拉氏变换的定理
线性定理 微分定理 积分定理 位移定理
控制的定义
控制的本意 :为了达到某种目的对事物进行支配、 管束、管制、管理、监督、镇压。
例1.[钢铁轧制]:轧出厚度一致的高精度铁板 温度控制,生铁成分控制,厚度控制,张力控制,等等。
自动控制 :
在没有人直接参与的情况下,利用外加的设备或装置 (称 控制装置或控制器), 使机器、设备或生产过程 (被控对象)的某个工作状态或参数(即 被控量 )自动 地按照预定的规律运行。
(an s n an1s n1 ... a1s a0 )Y (s) (bm s m bm1s m1 ... b1s b0 )U (s)
系统的传递函数 Y (s) bm s m bm1s m1 ... b1s b0 G( s ) U (s) an s n an1s n1 ... a1s a0
微分方程的建立(电学)
电阻
电容
电感
电学:欧姆定理、基尔霍夫定律。
Example 1
解:设回路电流为i,根据基尔霍夫定理 :
Example 2
列写如下图所示RC网络的微分方程。给定输入电压 为系统的输入量,电容上的电压为系统的输出量。
R1 R2
ur(t)
C1
C2
uc(t)
模糊集(fuzzy set)相关理论知识简介
2、模糊度计算公式 (1)海明(haming)模糊度 海明(haming)模糊度
其中, 是论域U中元素的个数, 其中,n是论域U中元素的个数, 1 µA (ui)≥0.5 )≥0 µA 0.5(ui)= 0 µA (ui)<0.5
37
(2)欧几里德(Euclid)模糊度 欧几里德(Euclid)模糊度
模糊理论(1 模糊理论(1)
1
一、集合与特征函数
1、论域 处理某一问题时对有关议题的限制范围称为该问题 的论域。 的论域。
2
2、集合 在论域中,具有某种属性的事物的全体称为集合。 在论域中,具有某种属性的事物的全体称为集合。
3
3、特征函数 设A是论域U上的一个集合,对任何u∈U,令 是论域U上的一个集合,对任何u 1 当u∈A CA(u)= 0 当u A 则称C (u)为集合A的特征函数。 则称CA(u)为集合A的特征函数。 显然有: A={ u | CA(u)=1 } (u)=1
13
三、模糊集表示法
1、扎德表示法1 扎德表示法1 设论域U 设论域U是离散的且为有限集: U={ u1, u2, …, un, } 模糊集为:A={µ 模糊集为:A={µA(u1), µA(u2), … , µA(un) } 则可将A 则可将A表示为:
14
A=µA(u1)/ u1+µA(u2)/ u2+ … +µA(un)/ un 或 A={ µA(u1)/ u1,µA(u2)/ u2,… ,µA(un)/ un } 或 A= n µA(ui)/ ui ∑ 或 i =1 A= µA(u)/ u u∈U
27
模糊理论(2 模糊理论(2)
28
一、模糊集的λ水平截集 模糊集的λ
模糊推理
摘要模糊推理是以模糊集合论为基础描述工具,对以一般集合论为基础描述工具的数理逻辑进行扩展,从而建立了模糊推理理论,是不确定推理的一种。
在人工智能技术开发中有重要意义。
模糊建模是指利用模糊系统逼近未知的非线性动态,从而逼近于整个系统。
本文全面回顾了模糊推理的产生背景、研究现状和发展方向,并介绍了模糊系统、模糊集合以及模糊建模等的基础理论知识。
详细阐述了Sugeno模型的建模过程,利用模糊推理系统对非线性函数进行逼近,通过matlab仿真实例说明该建模方法的有效性。
最后,对全文进行总结,概括本篇文章的主旨,并提出今后的研究方向。
关键词:模糊推理,模糊建模,仿真AbstractFuzzy reasoning based on fuzzy sets theory to describe tool,it is based on general set theory of mathematical logic described tools, so as to establish the extended fuzzy reasoning theory,it is an uncertainty reasoning. It is important to the development of artificial intelligence technology. Fuzzy model is refered to the use of fuzzy system to approach unknown nonlinear dynamic,then approach the whole system.This paper reviews the background of fuzzy reasoning,research status and development direction,and introduces fuzzy system,the fuzzy set and the fuzzy model and basic theoretical knowledge. It also expounds the Sugeno modeling process,and use fuzzy inference system to approximate nonlinear function. Through matlab simulation example shows the effectiveness of the modeling methodFinally,the full text is summarized to express the purpose of this article, and puts forward the direction of future research.Keywords: fuzzy reasoning,fuzzy modeling,simulation目录1.绪论 (1)1.1 模糊思想的起源 (1)1.1.1 精确思维的缺陷 (1)1.1.2 逻辑推理与模糊性 (1)1.2 模糊推理理论研究的进展 (3)1.3 模糊推理的研究领域和成果 (4)1.3.1 模糊推理在模糊控制中的研究与应用 (4)1.3.2 模糊推理在人工智能中的研究与应用 (4)2.模糊系统基础 (6)2.1 模糊集 (6)2.2 模糊集的表示一隶属度函数 (6)2.3 If...then规则 (7)2.4 模糊推理 (8)2.5 模糊聚类 (10)3.模糊建模 (11)3.1 模糊模型建模过程 (11)3.2 非线性系统的T-S模糊模型 (12)3.3 T-S模型的参数辨识 (13)4.仿真实例 (16)4.1 仿真软件简介 (16)4.2 设计原理 (16)4.3 仿真实例 (18)4.4 结论 (22)结束语 (24)参考文献 (25)致谢 (26)1.绪论1.1 模糊思想的起源1.1.1 精确思维的缺陷迄今,经典逻辑和精确数学的成功推动了精确科学的迅速发展; 精确科学的巨大成就也造成了人类对“精确”的顶礼膜拜。
46基于TS模糊模型的模糊控制

(在四个工作点)分别线性化后的线性模型为:
0
A1
=
g
4l 3 - aml
1 0
0
,B1
-a
4l 3 - aml
0
A2
=
2g
p 4l 3 - amlb2
1
0
0
,
B2
-ab
4l 3 - amlb2
u( t )=Kx(t)=-120.6667
-22.6667
x1(t) x2 (t)
4.2.3 基于T-S模糊模型的模糊控制
如何设计倒立摆系统的控制器?
2. (单个工作点)线性化+线性系统控制器设计方法
通常来说,基于单点 线性化的线性控制器 只能实现局部镇定, 很难实现全局镇定。
式中
pj (x)
n
i1 Ai
j
( xi
)
,
M j 1
n
i1 Ai
j
( xi
)
Ai j (xi ) 为高斯隶属函数。
j 1, 2,..., M
模糊基函数的性质
模糊系统可看作是模糊基函数的线性组合,或者模糊系统等价于 FBF’s 的扩展:
M
y f (x) p j (x) j , j 1
4.2.3 基于T-S模糊模型的模糊控制
模糊系统的万能逼近性
王立新 于1984和1987年西北 工业大学分别获学士和硕士学 位 1992年于美南加州大学获 博士学位。1993年至今任教于 香港科技大学电机与电子工程 系。师从模糊理论的创始人 Zadeh教授
模糊推理方法
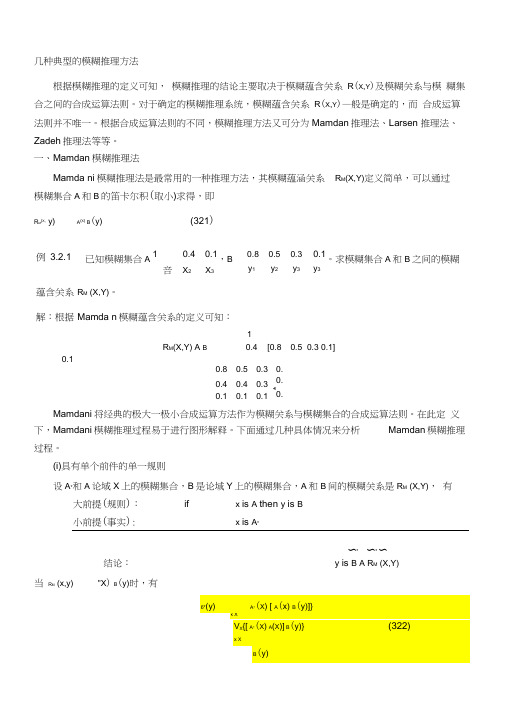
几种典型的模糊推理方法根据模糊推理的定义可知, 模糊推理的结论主要取决于模糊蕴含关系 R (X ,Y )及模糊关系与模 糊集合之间的合成运算法则。
对于确定的模糊推理系统,模糊蕴含关系 R (X ,Y )—般是确定的,而 合成运算法则并不唯一。
根据合成运算法则的不同,模糊推理方法又可分为Mamdan 推理法、Larsen 推理法、Zadeh 推理法等等。
一、Mamdan 模糊推理法Mamda ni 模糊推理法是最常用的一种推理方法,其模糊蕴涵关系 R M (X,Y)定义简单,可以通过 模糊集合A 和B 的笛卡尔积(取小)求得,即R M (X , y)A (X ) B(y)(321)例 3.2.1 已知模糊集合A 10.4 0.1,B 0.8 0.5 0.3 0.1。
求模糊集合A 和B 之间的模糊咅 X 2X 3y 1y 2y 3y 3蕴含关系 R M (X,Y)。
解:根据 Mamda n 模糊蕴含关系的定义可知:10.4R M (X,Y) A B[0.8 0.5 0.3 0.1]0.10.8 0.5 0.3 0.10.4 0.4 0.30.10.1 0.1 0.1 0.1Mamdani 将经典的极大一极小合成运算方法作为模糊关系与模糊集合的合成运算法则。
在此定 义下,Mamdani 模糊推理过程易于进行图形解释。
下面通过几种具体情况来分析 Mamdan 模糊推理过程。
(i)具有单个前件的单一规则设A *和A 论域X 上的模糊集合,B 是论域Y 上的模糊集合,A 和B 间的模糊关系是R M (X,Y), 有大前提(规则): ifx is A then y is B 小前提(事实):x is A*〜* 〜* 〜结论:y is B A R M (X,Y)当 R M(x,y)"X ) B (y)时,有其中 V [ A *(x) A (x)],称为A 和A *的适配度x X在给定模糊集合A *、A 及B 的情况下,Mamdan 模糊推理的结果B *如图321所示〜〜*IB1AA1AB*JJ■--------- rxy图3.2.1 单前提单规则的推理过程根据Mamdani 推理方法可知,欲求B *,应先求出适配度(即A *(x) A (x)的最大值);然后用适配度 去切割B 的MF 即可获得推论结果B *,如图3.2.1中后件部分的阴影区域。
takagi-sugeno模糊推理法

takagi-sugeno模糊推理法
Takagi-Sugeno模糊推理法是一种常见的模糊控制方法,也被称
为T-S方法。
该方法基于对输入变量和输出变量进行分段线性建模,
从而实现控制系统的设计。
具体来说,Takagi-Sugeno模糊推理法分为两个步骤。
首先,将
输入域划分为若干个模糊子集,针对每个模糊子集建立一个线性模型,这些线性模型可以表示为条件语句的形式。
然后,将这些条件语句进
行加权求和,得到输出变量的模糊输出值。
Takagi-Sugeno模糊推理法不仅可以用于模糊控制系统的设计,
还可以用于数据挖掘、模式识别等领域。
它的优点是对于复杂的非线
性系统有较好的适应性和泛化能力。
基于自适应神经-模糊推理系统的边坡变形预测模型
基于自适应神经-模糊推理系统的边坡变形预测模型摘要:利用自适应神经模糊推理系统(anfis)处理非线性关系的强大能力,将其应用于边坡变形预测。
发现建立的anfis模型预测精度远高于灰色模型。
最后用工程实例与灰色模型进行了对比,结果表明,anfis模型优于灰色模型,特别是在模拟多输入变量、高维数下边坡变形预测问题时有着独特的优势,具有一定的推广应用价值。
abstract: to compensate the defect of the growth model and the artificial neural network model which are the most commonly used method to settlement prediction of soft clay roadbed, proposed to adaptive neuro-fuzzy inference system (anfis) applied to soft clay roadbed settlement prediction. anfis put the fuzzy reasoning process of the expert inherent in the neural network structure, so, the neural network nodes and the weights have a clear physical meaning, and avoid the “black box”through the working process of neural network. at the same time that the system can used the least square method and gradient descent algorithm for the combination of mixed, both with the self-adaptive and learning ability of a neural network, but also overcome its disadvantages such as the local minimum, the prediction accuracy is also much higher than the growth curve model. they are applied to thecalculation for examples, the result showed that the anfis model has great theoretic significance and practical value in preventing roadbed sink and guaranteeing the road behavior in practice.关键词:边坡工程; anfis模型; 变形预测key words: road engineering;anfis model;soft clay roadbed;settlement prediction中图分类号:k826.16 文献标识码:a 文章编号中图分类号:文献标识码:文章编号:0 引言现代建(构)筑物建设中,经常会碰到许多高填深挖的边坡问题,边坡失效往往会给工程建设造成难以弥补的损失。
《T-S模糊时滞系统的稳定性分析及H_∞滤波》范文

《T-S模糊时滞系统的稳定性分析及H_∞滤波》篇一T-S模糊时滞系统的稳定性分析及H∞滤波应用一、引言随着现代控制理论的发展,T-S模糊时滞系统在复杂系统建模和控制中得到了广泛应用。
然而,由于系统中存在的时滞现象和不确定性,其稳定性分析和控制问题变得尤为复杂。
本文旨在探讨T-S模糊时滞系统的稳定性分析方法,并研究H∞滤波在系统中的应用。
二、T-S模糊时滞系统概述T-S模糊时滞系统是一种基于T-S模糊模型的时滞系统,通过模糊逻辑描述系统中的不确定性和复杂性。
该系统在许多领域如航空航天、自动化制造等都有广泛的应用。
然而,由于系统中存在的时滞和不确定性,其稳定性和性能分析变得复杂。
三、T-S模糊时滞系统的稳定性分析为了分析T-S模糊时滞系统的稳定性,本文采用Lyapunov稳定性理论。
首先,构建适当的Lyapunov函数,通过求导和分析其性质,推导出系统稳定的充分条件。
此外,本文还考虑了系统中可能存在的不确定性因素,如参数变化、外部干扰等,通过引入鲁棒控制方法,提高系统的稳定性和鲁棒性。
四、H∞滤波在T-S模糊时滞系统中的应用H∞滤波是一种有效的信号处理和滤波方法,可以抑制系统中的噪声和干扰。
在T-S模糊时滞系统中,H∞滤波可以用于估计系统的状态和输出,提高系统的性能和鲁棒性。
本文研究了H∞滤波在T-S模糊时滞系统中的应用,通过设计合适的滤波器,实现系统的状态估计和噪声抑制。
同时,本文还探讨了H∞滤波与控制器设计的结合,以提高系统的整体性能。
五、实验与结果分析为了验证本文提出的T-S模糊时滞系统稳定性分析及H∞滤波应用的有效性,我们进行了实验研究。
通过模拟不同场景下的T-S模糊时滞系统,分析系统的稳定性和性能。
实验结果表明,本文提出的稳定性分析方法和H∞滤波应用可以有效地提高T-S 模糊时滞系统的稳定性和性能。
同时,我们还对实验结果进行了详细的分析和讨论,为进一步的研究和应用提供了参考。
六、结论与展望本文研究了T-S模糊时滞系统的稳定性分析及H∞滤波的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Sugeno模糊模型是一种广泛应用于控制系统、模式识别和决策系统中的数学模型,它基于模糊集合理论和模糊逻辑,能够处理不确定性和模糊性信息,具有很强的鲁棒性和适应性。
本文将对Sugeno模糊模型的基本概念进行深入探讨,包括模糊集合、隶属函数、模糊规则以及模糊推理等方面。
1. 模糊集合的概念
模糊集合是指元素的隶属度不是0或1,而是在0和1之间的一种中间状态。
它是模糊逻辑中的基本概念,表示了元素与某个概念的模糊程度。
在Sugeno模糊模型中,模糊集合通常用隶属函数来描述,隶属函数可以是三角形、梯形、高斯等形式。
2. 隶属函数的定义
隶属函数是描述元素与模糊集合的隶属关系的函数。
它通常具有单调递增或单调递减的特性,可以通过一些参数来调节其形状。
对于三角形隶属函数,可以通过中心和宽度两个参数来确定其形状。
3. 模糊规则的建立
模糊规则是Sugeno模糊模型中的重要组成部分,它描述了输入变量和输出变量之间的关系。
一般来说,模糊规则由若干个条件部分和一个结论部分组成,条件部分使用模糊逻辑运算符来连接多个隶属函数,结论部分则是输出变量的线性组合。
4. 模糊推理的方法
模糊推理是Sugeno模糊模型的核心,它通过模糊规则对输入变量
进行模糊推理,得到输出变量的模糊值,并通过去模糊化处理得到模
糊输出。
常见的模糊推理方法包括最大隶属度法、最小最大法、加权
平均法等。
Sugeno模糊模型通过模糊集合、隶属函数、模糊规则和模糊推理等
基本概念,能够有效地处理不确定性和模糊性信息,具有广泛的应用
前景和理论研究价值。
希望本文对Sugeno模糊模型的基本概念有所
帮助,引发更多学者对其深入研究,推动模糊逻辑在各个领域的应用
和发展。
Sugeno模糊模型是模糊逻辑在实际应用中的典型代表,在
控制系统、模式识别、决策系统等领域展现出了强大的优势。
其基本
概念包括模糊集合、隶属函数、模糊规则和模糊推理等,下面将对每
个概念进行进一步扩展。
5. 模糊集合的运算
在Sugeno模糊模型中,模糊集合之间可以进行交、并、补等运算,这使得模糊集合能够灵活地表达复杂的不确定性信息。
交运算可以用
来描述两个模糊集合的共同隶属度,并运算可以描述两个模糊集合的
综合隶属度,补运算可以描述模糊集合的对立隶属度。
6. 隶属函数的优化
隶属函数的选择和优化对Sugeno模糊模型的性能具有重要影响。
通过合理选择隶属函数的形状、参数和数量,可以提高模型的精度和泛化能力。
采用自适应的隶属函数,可以在面对不同的输入数据时自动调整隶属函数的形状和参数,提高模型的鲁棒性和适应性。
7. 模糊规则的推理机制
在Sugeno模糊模型中,模糊规则的推理机制决定了输入变量与输出变量之间的映射关系。
通过设计合理的模糊规则库,可以使模型对输入的模糊信息进行有效的推理和决策。
一些先进的推理机制还可以将模糊推理与模型的学习和优化相结合,进一步提升模型的性能和应用价值。
8. 模糊推理的改进
随着模糊逻辑理论的不断发展,各种改进的模糊推理方法也不断涌现。
混合模糊推理结合了模糊推理和粗糙集理论,能够更好地处理模糊信息和不确定性;模糊Petri网通过建模和仿真实现模糊推理的并行计算。
这些新方法为Sugeno模糊模型的应用拓展了新的可能性,使得模糊逻辑在更多领域发挥了作用。
9. 模糊控制系统的应用
在实际应用中,Sugeno模糊模型广泛应用于控制系统中。
模糊PID控制器通过模糊逻辑的思想,结合了经典的比例、积分、微分控制器,具有鲁棒性强、抗干扰能力强的特点,适用于复杂、非线性的控制系统。
另外,模糊自适应控制在自适应学习的基础上,结合模糊
逻辑和控制理论,可以实现对复杂系统的精确控制。
10. 模糊决策系统的应用
模糊决策系统是Sugeno模糊模型在决策领域的重要应用,可以灵活地处理不确定和模糊的决策问题。
通过对复杂的决策过程进行模糊建模,可以使系统更加稳健和鲁棒。
模糊决策树能够对多因素、多属性的决策问题进行多层次的模糊决策,解决了传统决策树在处理模糊信息时的局限性。
11. 模糊模式识别的应用
在模式识别领域,Sugeno模糊模型也有着广泛的应用。
模糊聚类可以对模糊性较高的数据进行聚类分析,能够更好地处理实际数据中的模糊性和不确定性。
另外,模糊神经网络结合了神经网络的学习和优化能力以及模糊逻辑的模糊性处理能力,能够应对各种复杂的模式识别问题。
Sugeno模糊模型作为模糊逻辑理论的重要应用之一,具有较强的可塑性和适应性,能够在不确定和模糊信息的处理中发挥重要作用。
随着模糊逻辑的理论不断完善和应用技术的不断发展,相信Sugeno模糊模型在未来会有更广泛的应用空间和更深入的研究价值。
希望本文对Sugeno模糊模型的基本概念有所启发,能够为相关研究和应用工作提供一定的参考和帮助。