大话多旋翼飞行器--欧拉角与四元数
X型四旋翼无人机建模及四元数控制
X型四旋翼无人机建模及四元数控制
丁少宾;肖长诗;刘金根;文元桥
【期刊名称】《系统仿真学报》
【年(卷),期】2015(0)12
【摘要】对X型四旋翼无人机做了合理假设以及受力分析,推导并建立了X型四旋翼无人机全面的动力学数学模型,考虑了无人机平动、转动空气阻力,并且将转子、螺旋桨和机体看成多刚体系统。
在Solidworks软件中,建立了无人机实物模型以获得无人机惯性参数。
直接以四元数作为反馈控制量,设计出多通道双回路矢量PD 控制系统。
以Matlab/Simulink为平台,对四元数反馈控系统和欧拉角反馈控制系统进行对比控制仿真。
从仿真结果来看,这2种反馈模式都能对无人机模型进行位置、姿态跟踪等控制,但是四元数反馈控制系统具有过渡时间短、计算量少以及无奇点产生的优点。
【总页数】6页(P3057-3062)
【作者】丁少宾;肖长诗;刘金根;文元桥
【作者单位】湖北省内河航运技术重点实验室;武汉理工大学信息工程学院光纤传感技术与信息处理教育部重点实验室
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.四旋翼无人机建模与PID控制器设计
2.超/特高压输电线路巡检四旋翼无人机的建模与回馈递推控制
3.自主巡线四旋翼无人机建模及姿态控制器设计
4.四旋翼无人机的控制原理及建模
5.带单关节机械臂四旋翼无人机的建模与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
飞行器姿态动力学建模方法比较综述

飞行器姿态动力学建模方法比较综述飞行器姿态动力学建模是飞行器设计和控制的重要工作之一。
姿态动力学模型描述了飞行器在空中运动过程中的导航、姿态变化和动力学响应。
准确建模飞行器的姿态动力学对于飞行控制系统的设计、性能评估和飞行安全至关重要。
在飞行器姿态动力学建模中,主要涉及到飞行器的姿态表示、运动方程和控制输入等方面。
根据姿态表示的方法可以将姿态动力学模型分为欧拉角、四元数和旋转矩阵等不同的表示形式。
同时,在建模过程中也需要考虑到飞行器的非线性特性,以及可能存在的不确定性和扰动。
常见的飞行器姿态动力学建模方法包括欧拉角方法、四元数方法、旋转矩阵方法和仿射变换方法等。
每种方法都有其特点和适用范围。
下面将对这些方法进行综述和比较。
1. 欧拉角方法欧拉角方法是最常见和直观的姿态表示方法之一。
它将飞行器的姿态分解为绕三个相互垂直的轴(通常是roll、pitch和yaw轴)的旋转角度。
然而,由于欧拉角存在奇异点和万向锁等问题,这种方法在某些情况下不够精确和稳定。
2. 四元数方法四元数方法通过四元数数值来表示飞行器的姿态,它具有无奇异性和唯一性的特点,能够准确描述飞行器的旋转。
四元数方法相对于欧拉角方法在计算上更加高效和精确,因此在飞行控制中得到广泛应用。
3. 旋转矩阵方法旋转矩阵方法使用一个3x3的矩阵来表示姿态,该矩阵描述了飞行器的旋转变换。
旋转矩阵方法在计算上相对复杂,但可以提供更多的姿态信息,适用于需要高精度姿态表示的任务。
4. 仿射变换方法仿射变换方法是一种灵活的建模方法,可以通过旋转、平移和缩放等变换来描述飞行器的姿态。
这种方法可以较好地处理复杂姿态动力学建模问题,但也需要更多的计算资源和数学基础。
综合比较这些方法可以发现,四元数方法是最受欢迎和实用的飞行器姿态动力学建模方法之一。
四元数方法相比于其他表示方法具有更高的计算效率和数值稳定性,并且可以避免奇异性和万向锁问题。
因此,在飞行器姿态动力学建模中,四元数方法可以作为首选方法使用。
四元数与欧拉角刚体动力学数值积分算法及其比较

四元数与欧拉角刚体动力学数值积分算法及其比较徐小明;钟万勰【摘要】为推广四元数保辛积分在工程中的应用,对欧拉角表示的状态方程数值积分与四元数的保辛积分进行比较.重陀螺的数值仿真结果表明四元数保辛积分的数值结果明显优于欧拉角状态方程积分.与欧拉角状态方程积分相比,四元数保辛积分在刚体动力学的数值仿真中更具优势.【期刊名称】《计算机辅助工程》【年(卷),期】2014(023)001【总页数】6页(P59-63,75)【关键词】四元数;欧拉角;刚体动力学;保辛;重陀螺【作者】徐小明;钟万勰【作者单位】大连理工大学工程力学系,辽宁大连116024;大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024;大连理工大学工程力学系,辽宁大连116024;大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024【正文语种】中文【中图分类】TP391.9;O313.30 引言四元数、欧拉角和方向余弦[1]是描述刚体旋转最主要的3 种坐标形式.方向余弦法需要9 个参量,应用较少;而另外2 种则应用广泛,如航天器姿态控制和捷联式惯性导航系统[1]等,对于两者的研究也卷帙浩繁,但对两者优劣的评价却褒贬不一.描述刚体在三维空间中的运动姿态可采用2 类12 种欧拉角系统,分别对应于不同的旋转轴先后次序.目前公认的用欧拉角描述旋转的固有缺陷是奇异性问题[2],即:无论采用哪种欧拉角系统,都不可避免地会含有奇异点,使得在该点附近区域进行的数值积分精度不高.对于小角度旋转,只要采用适当的欧拉角系统便可避开奇异点;而在大角度旋转时,若想避开奇异点,必须提供2 套欧拉角系统交替进行计算.据此,黄雪樵[3]提出一种“双欧法”的计算方法;近几年仍有学者[4]在继续研究该方法.双欧法虽然解决奇异性问题,但是计算过程较复杂.四元数用于描述刚体旋转,没有奇异性问题,可很好地描述刚体的全角度旋转.然而,四元数需要满足长度等于1 的单位约束,这成为制约其应用的限制.在实际应用中,经常采用的正交化修正等方法只能缓解长度的偏移,无法从根本上解决问题;黄雪樵[3]在其双欧法中也有所讨论.目前,对于单位约束最佳的解决方案是将四元数表示的刚体动力学方程导入微分代数方程范畴,近年来逐渐有学者[5-7]展开相关问题的研究.徐小明等[8]提出一种基于四元数理论描述刚体旋转的保辛数值积分方法.该方法先将问题导入微分-代数方程系统,然后利用分析结构力学理论[9]进行逐步积分,该积分保辛.该方法在积分点上严格满足四元数长度等于1 的约束条件,而在区段内部则由插值近似,属于祖冲之类方法[10].数值算例表明仿真效果优异.本文简要介绍四元数和欧拉角的基本理论,以重陀螺为例对2 种表示形式的数值积分进行比较.对于欧拉角表述,应用比较普遍的状态方程表述.研究表明,以欧拉角和角速度为状态变量形成的1 阶微分方程在使用差分近似积分时,精度损失很大,能量不守恒;该现象被周江华等[11]称为“睡陀螺”.这是一个值得注意的问题,却未得到广泛关注;而采用文献[8]给出的保辛格式,四元数单位长度约束条件得到满足,仿真结果优异,能量也达到守恒.1 刚体旋转及其运动学表示刚体运动由质心平动和绕质心转动组成.如果刚体上有一固定点,则称为刚体定点转动问题.假设Oxyz 为系统的惯性坐标系,O 为原点,亦为固定点.Ox'y'z'为随体坐标系,固定于刚体上.若将刚体的随体坐标轴取为与固定点有关的主轴,则刚体定点转动可由式(1)描述.式中:I1,I2和I3为将定点选为参考点的主转动惯量;ω1,ω2和ω3为绕3 个主轴的角速度分量;N1,N2和N3为外力矩沿3 个主轴的分量.式(1)中的3 个方程称为刚体定点转动的欧拉方程.要求解式(1)的微分方程,还需将描述旋转的坐标与角速度联系起来.如果采用欧拉角描述刚体运动,可设φ,θ 和Ψ 分别代表绕z 轴、转动后的x 轴及二次转动后的z 轴的三次旋转,即采用12 种欧拉角系统中的z-x-z 模式,则角速度分量与欧拉角之间的微分关系可以表示为式(2)称为刚体定点转动的运动方程.将式(2)与式(1)联立,将(φ,θ,Ψ)作为广义位移,将(ω1,ω2,ω3)作为广义速度,构成系统的状态方程.对于此状态方程,应用欧拉差分格式或者龙格库塔格式等可进行数值积分.本文将在第2 节对其应用辛-欧拉格式[12]进行研究.另一方面,若采用单位四元数描述旋转,则有四元数的运动学方程可以定义四元数向量式(3)隐含着四元数单位长度的约束条件将式(3)与式(1)联立可得状态方程,对其应用数值算法求解,约束条件无法很好地满足,往往导致结果失真.反对称群是正交矩阵群的李代数[8],据此在群上定义微商,可将式(3)等价成式中:通过式(6)便可得到刚体的动能,进而得到系统的Lagrange 函数,然后通过作用量的变分原理进行数值离散求解,具体算法见第2 节.2 数值积分算法首先给出2 种表示形式的积分格式.对于欧拉角,采用辛-欧拉差分格式[12].为此,可将式(2)和(1)写为式中:则欧拉差分格式为对式(11)进行迭代便可逐步积分求解.根据文献[12],将式(11)应用于Hamilton 正则方程可达到保辛效果.显然式(8)仅是状态方程表述,不能达到保辛效果.然而,式(8)应用十分广泛,形式也较为简单,对其数值积分进行比较研究具有一定的现实意义.对于四元数的数值积分,首先需要刚体系统的Lagrange 函数式中:U(q)为系统的势能为系统的动能.根据式(6),式(12)可以写为式中:q 参见式(4).要进行数值积分,首先要对系统进行有限元离散.具体来说,取离散时间区段η,t0=0,t1=η,t2=2η,…,tk=kη,….可假设tk-1时的位移与速度是已知,并满足的约束.现在的问题是通过tk-1步的已知量计算下一个时间步的qk和为此,首先在[tk-1,tk]时间段内做有限元离散.为计算简便,假设区段内的位移和速度分别为则根据式(12)与四元数约束条件可以得到离散的区段作用量(含约束)式中:λk-1和λk为Lagrange 乘子.根据分析结构力学理论[9]给出四元数的保辛积分格式,对式(16)进行迭代便可逐步积分求解.对于式(16)的具体推导以及作为参考的具体算法见文献[8].3 重陀螺的数值模拟3.1 算例1图1 对称重陀螺Fig.1 Symmetric heavy top考察如图1 所示的对称重陀螺绕其尖点O 的运动.该尖点固定于惯性空间;取陀螺的对称轴为随体坐标Ox'y'z'的z'轴;陀螺质心与尖点的距离为l,陀螺的基本参数为:m=1 kg,l=0.04 m,I1=I2=0.002 0 kg·m2,I3=0.000 8 kg·m2.取重力加速度g=9.8 m/s2.对于此例,可以写出式(10)对应的重力矩的具体表达式以及式(12)对应的重力势能的具体形式对于初始时刻,选取对应于式(16)的初始条件为对于式(4)在k=1 时的p0,结合式(12)和(20),则由Legendre 变换给出具体见文献[8].这一初始条件对应于陀螺运动中的“尖点运动”.设陀螺对称轴(z'轴)与单位球面的交点为A,则任意时刻A 点的位置由式(22)确定.采用四元数表示则为对称重陀螺的z'轴与单位球面交点A 的z 坐标-时间曲线见图2.对于对称重陀螺,是有椭圆函数解的,z 随时间应该呈周期变化.由图2 可知,唯有当时间间隔非常小时,用欧拉角表示刚体旋转的辛-欧拉差分格式的数值解才与解析解拟合得较好,步长较大时呈现发散现象;而基于四元数的保辛积分,不论大步长还是小步长,均与解析解吻合得很好.其中,当步长取Δt=10-2 s 时,1 个周期内仅有15 个左右的积分点,与解析解相比,仅仅相位略微超前,表明在大步长下数值积分的结果仍然可信.图2 对称重陀螺的z'轴与单位球面交点A 的z 坐标-时间曲线Fig.2 z coordinate vs time curves of point A of intersection of symmetric heavytop axis z' and unit sphere对称重陀螺A 点长时间轨迹沿x-y 平面的投影见图3.由于是保守系统,z'轴应以z 轴为轴绕其转动,周而复始,所以A 点沿x-y 平面的投影应该限制在一个圆环内.图3(b)表明四元数的保辛积分很好地模拟这一现象;图3(a)表明,在Δt=10-3 s 时,欧拉角的保辛积分结果完全失真,实际上如果继续减小步长至Δt=10-4 s,为四元数积分步长的1/100,这一现象仍未得到缓解.本文采用的是辛-欧拉格式,文献[11]中采用4 阶龙格库塔法,同样出现此现象,被称之为“睡陀螺”.图3 对称重陀螺A 点长时间轨迹沿x-y 平面的投影Fig.3 x-y plane projectionof long time trajectory of point A for symmetric top2 种数值积分的系统能量随时间变化情况见图4.在欧拉角表示中,虽然采用辛-欧拉格式进行数值积分,但是能量却保持得不好,这验证对状态方程应用辛-欧拉格式并不能保辛.与之相反,四元数的数值积分保辛,其能量保持得很好,这也是保辛积分的优势所在.四元数保辛积分的约束误差见图5,表明在时间积分过程中单位长度约束条件满足得很好.3.2 算例2将算例1 中转动惯量改为I1=0.002 25 kg·m2,I2=0.001 75 kg·m2,I3不变,其他参数以及初始条件与算例1 相同.不对称重陀螺A 点长时间轨迹沿x-y 平面的投影见图6,采用的是基于四元数的保辛积分.与图2(b)对比可看出,其轨迹一直限制在一圆环内,这也是保守系统的特点.本例表明,四元数保辛积分,不论对于对称陀螺还是不对称陀螺,均能达到较好的仿真效果.图4 两种数值积分的系统的能量随时间变化情况Fig.4 Energy variation with respect to time for two numerical integration systems图5 四元数保辛积分的约束误差Fig.5 Constraint error of symplectic preservation integration of quaternion图6 不对称重陀螺A 点长时间轨迹沿x-y 平面的投影Fig.6 x-y plane projection of long time trajectory of point A for asymmetric top注:时间间隔Δt=10-2 s,时间长度t=50 s4 结束语介绍2 种刚体旋转的数值积分,一种基于欧拉角表示,另一种基于四元数表示.以重陀螺的高速旋转为例,对2 种数值积分进行比较发现:以欧拉角、角速度组成状态变量,然后直接使用辛-欧拉格式不能保辛,能量衰减很快,数值积分存在缺陷;与之相反,采用四元数表示,根据分析结构力学的保辛积分方法,并结合祖冲之类方法的思想,可以很好地避免约束违约,仿真效果令人满意,可作为陀螺等仿真分析的有力工具.本文仅对以欧拉角、角速度组成状态变量的数值积分进行研究,对其他形式并未涉及,对其积分效果不佳的成因亦未研究,还有很多工作有待展开.参考文献:【相关文献】[1]张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社,1992:48-80.[2]赵晓颖,温立书,么彩莲.欧拉角参数表示下姿态的2 阶运动奇异性[J].科学技术与工程,2012,12(3) :634-637.ZHAO Xiaoying,WEN Lishu,YAO Cailian.The second-order kinematic singularity of orientation in Euler parameters representation[J].Sci Technol &Eng,2012,12(3) :634-637.[3]黄雪樵.克服欧拉方程奇异性的双欧法[J].飞行力学,1994,12(4) :28-37.HUANG Xueqiao.The dual-Euler method for overcoming the singularity of Euler equation[J].Flight Dynamics,1994,12(4) :28-37.[4]李跃军,阎超.飞行器姿态角解算的全角度双欧法[J].北京航空航天大学学报,2007,33(5) :505-508.LI Yuejun,YAN Chao.Improvement of dual-Euler method for full scale Eulerian angles solution of aircraft[J].J Beijing Univ Aeronautics &Astronautics,2007,33(5) :505-508.[5]NIKRAVESH P E,WEHAGE R A,KWON K.Euler parameters in computational kinematics and dynamics:Part 1[J].J Mechanisms,Transmissions & Automation Des,1985,107(3) :358-365.[6]BETSCH P,SIEBERT R.Rigid body dynamics in terms of quaternions:Hamiltonian formulation and conserving numerical integration[J].Int J Numer Methods Eng,2009,79(4) :444-473.[7]UDWADIA F E,SCHUTTE A D.An alternative derivation of the quaternion equationsof motion for rigid-body rotational dynamics[J].J Appl Mech,2010,77(4) :44505. [8]徐小明,钟万勰.刚体动力学的四元数表示及保辛积分[J].应用数学和力学,2014,35(1) :1-11.XU Xiaoming,ZHONG Wanxie.Symplectic integration of rigid body motion by quaternion parameters[J].Appl Math & Mech,2014,35(1) :1-11.[9]钟万勰,高强.约束动力系统的分析结构力学积分[J].动力学与控制学报,2006,4(3) :193-200.ZHONG Wanxie,GAO Qiang.Integration of constrained dynamical system via analytical structrural mechanics[J].J Dynamics & Contr,2006,4(3) :193-200.[10]钟万勰,高强,彭海军.经典力学辛讲[M].大连:大连理工大学出版社,2013:202-241. [11]周江华,苗育红,李宏,等.四元数在刚体姿态仿真中的应用研究[J].飞行力学,2000,18(4) :28-32.ZHOU Jianghua,MIAO Yuhong,LI Hong,et al.Research of attitude simulation using guaternion[J].Flight Dynamics,2000,18(4) :28-32.[12]HAIRER E,LUBICH C,WANNER G.Geometric numerical integration:structure-preserving algorithms for ordinary differential equations[M].Berlin:Springer,2006:189.。
四元素与欧拉角

1.欧拉角在四元数出现之前先看下欧拉角:对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
为了后面的角度不混乱,我们要先区分参考系和坐标系的概念。
参考系即为大地参考系,是静止不动的。
而坐标系则固定于四轴飞行器,随着四轴飞行器的旋转而旋转。
按照右图所示。
设定xyz-轴为四轴上的参考轴,XYZ-轴则是大地的参考轴。
右图即为四轴相对地面进行了一定旋转,xy-平面与XY-平面的相交线为交点线,用英文字母(N)代表。
我们可以这样定义欧拉角:α是x-轴与交点线的夹角β是z-轴与Z-轴的夹角γ是交点线与X-轴的夹角这样我们就可以用三个欧拉角:(α,β,γ)其取值为0-360来描述四轴飞行器相对于大地的参考系的姿态角度了。
三个欧拉角:(α,β,γ)。
蓝色的轴是xyz-轴,红色的轴是XYZ-坐标轴。
绿色的线是交点线(N) 。
2.轴角欧拉角使用roll,pitch,yaw来表示这些分量的旋转值。
需要注意的是,这里的旋转是针对大地参考系说的,这意味着第一次的旋转不会影响第二、三次的转轴,简单的说,三角度系统无法表现任意轴的旋转,只要一开始旋转,物体本身就失去了任意轴的自主性,这也就导致了万向节锁(Gimbal Lock)的问题。
什么是Gimbal Lock?正如前面所说,因为欧拉描述中针对x,y,z的旋转描述是世界坐标系下的值,所以当任意一轴旋转90°的时候会导致该轴同其他轴重合,此时旋转被重合的轴可能没有任何效果,这就是Gimbal Lock,还有一种是轴角的描述方法,这种方法比欧拉描述要好,它避免了Gimbal Lock,它使用一个3维向量表示转轴和一个角度分量表示绕此转轴的旋转角度,即(x,y,z,angle),一般表示为(x,y,z,w)或者(v,w)。
(x,y,z)为旋转轴,w为旋转角度。
但这种描述法却不适合插值。
轴角的表示方法:那么轴、角的描述方法又有什么问题呢?虽然轴、角的描述解决了Gimbal Lock,但这样的描述方法会导致差值不平滑,差值结果可能跳跃,欧拉角描述同样有这样的问题。
大角度范围内四元数转化为欧拉角的算法_辛岩

ψ = arcctg(− A22 ) A21
结束
图 4 ψ 的求取算法流程图
图 5 卫星绕俯仰轴机动 180 度
图 6 卫星绕偏航轴机动正 90 度
135
全国第十二届空间及运动体控制技术学术年会论文
4 结论
图 7 卫星绕偏航轴机动负 90 度
本文对已有的欧拉角和四元数之间的转化关系进行了分析,在此基础上提出了转化算法的值 域拓展问题,解决了大角度情况下欧拉角存在奇异性的问题。通过数学仿真可以看出,所设计的 算法可以实现大角度的姿态机动,而且没有出现异常。所以,设计的算法完全合理,可以应用到 各种情况。
第 n 列对应的元素,以下同。 但上述三式仅适用于ϕ、θ、ψ ∈ (− π ,π ) 的情况。当ϕ、θ、ψ ∈ (−π,π ) 时,如果还用 22
这三式求欧拉角,将造成仿真的失败。因此,必须考虑转化算法的ϕ、θ、ψ 值域拓展问题,以
便能适合大角度机动时的姿态控制系统的仿真。本文设计了一种大角度范围内将四元数转化为欧
2.1 算法设计
1°对于ϕ 角
a. A22 ≥ 0或者A33 ≥ 0,
即ϕ
∈ [-
π
π ,
]时
,
22
ϕ = arcsin A23=arcsin B23 ;
b.
A22
<
0&
A33
<
0&
A23
≥
0,即ϕ
∈
π (
,π
]时,
2
ϕ = π − arcsin A23 = π − arcsin B23 ;
c.
A22
> −2& A22
< 0即ψ
∈(π
(转)四轴飞行器6050六轴传感器软件姿态解算

(转)四轴飞⾏器6050六轴传感器软件姿态解算使⽤MPU6050硬件DMP解算姿态是⾮常简单的,下⾯介绍由三轴陀螺仪和加速度计的值来使⽤四元数软件解算姿态的⽅法。
我们先来看看如何⽤欧拉⾓描述⼀次平⾯旋转(坐标变换):设坐标系绕旋转α⾓后得到坐标系,在空间中有⼀个⽮量在坐标系中的投影为,在内的投影为由于旋转绕进⾏,所以Z坐标未变,即有。
转换成矩阵形式表⽰为:整理⼀下:所以从旋转到可以写成上⾯仅仅是绕⼀根轴的旋转,如果三维空间中的欧拉⾓旋转要转三次:上⾯得到了⼀个表⽰旋转的⽅向余弦矩阵。
不过要想⽤欧拉⾓解算姿态,其实我们套⽤欧拉⾓微分⽅程就⾏了:上式中左侧,,是本次更新后的欧拉⾓,对应row,pit,yaw。
右侧,是上个周期测算出来的⾓度,,,三个⾓速度由直接安装在四轴飞⾏器的三轴陀螺仪在这个周期转动的⾓度,单位为弧度,计算间隔时T陀螺⾓速度,⽐如0.02秒0.01弧度/秒=0.0002弧度。
间因此求解这个微分⽅程就能解算出当前的欧拉⾓。
前⾯介绍了什么是欧拉⾓,⽽且欧拉⾓微分⽅程解算姿态关系简单明了,概念直观容易理解,那么我们为什么不⽤欧拉⾓来表⽰旋转⽽要引⼊四元数呢?⼀⽅⾯是因为欧拉⾓微分⽅程中包含了⼤量的三⾓运算,这给实时解算带来了⼀定的困难。
⽽且当俯仰⾓为90度时⽅程式会出现神奇的“GimbalLock”。
所以欧拉⾓⽅法只适⽤于⽔平姿态变化不⼤的情况,⽽不适⽤于全姿态飞⾏器的姿态确定。
四元数法只求解四个未知量的线性微分⽅程组,计算量⼩,易于操作,是⽐较实⽤的⼯程⽅法。
我们知道在平⾯(x,y)中的旋转可以⽤复数来表⽰,同样的三维中的旋转可以⽤单位四元数来描述。
我们来定义⼀个四元数:我们可以把它写成,其中,。
那么是⽮量,表⽰三维空间中的旋转轴。
w是标量,表⽰旋转⾓度。
那么就是绕轴旋转w度,所以⼀个四元数可以表⽰⼀个完整的旋转。
只有单位四元数才可以表⽰旋转,⾄于为什么,因为这就是四元数表⽰旋转的约束条件。
四元数与欧拉角(RPY角)的相互转换

四元数与欧拉⾓(RPY⾓)的相互转换RPY⾓与Z-Y-X欧拉⾓ 描述坐标系{B}相对于参考坐标系{A}的姿态有两种⽅式。
第⼀种是绕固定(参考)坐标轴旋转:假设开始两个坐标系重合,先将{B}绕{A}的X轴旋转γ,然后绕{A}的Y轴旋转β,最后绕{A}的Z轴旋转α,就能旋转到当前姿态。
可以称其为X-Y-Z fixed angles或RPY⾓(Roll, Pitch, Yaw)。
Roll:横滚 Pitch: 俯仰Yaw: 偏航(航向) 由于是绕固定坐标系旋转,则旋转矩阵为(cα is shorthand for cosα, sα is shorthand for sinα,and so on.)R XYZ(γ,β,α)=R Z(α)R Y(β)R X(γ)=cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ 另⼀种姿态描述⽅式是绕⾃⾝坐标轴旋转:假设开始两个坐标系重合,先将{B}绕⾃⾝的Z轴旋转α,然后绕Y轴旋转β,最后绕X轴旋转γ,就能旋转到当前姿态。
称其为Z-Y-X欧拉⾓,由于是绕⾃⾝坐标轴进⾏旋转,则旋转矩阵为:R Z′Y′X′(α,β,γ)=R Z(α)R Y(β)R X(γ)=cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ 可以发现这两种描述⽅式得到的旋转矩阵是⼀样的,即绕固定坐标轴X-Y-Z旋转(γ,β,α)和绕⾃⾝坐标轴Z-Y-X旋转(α,β,γ)的最终结果⼀样,只是描述的⽅法有差别⽽已。
In gerenal: three rotations taken about fixed axes yield the same final orientation as the same three rotations taken in opposite order about the axes of the moving frame.Axis-Angle与四元数 绕坐标轴的多次旋转可以等效为绕某⼀转轴旋转⼀定的⾓度。
四元数 旋转举证 转 欧拉角

四元数旋转举证转欧拉角四元数是一种描述三维空间旋转的数学工具,它是由一个标量和三个虚数构成的,可以视为在四维空间中的点。
与欧拉角相比,四元数旋转具有更好的可靠性和稳定性,并且能够避免万向锁问题(Gimbal lock)。
然而,在实际应用中,许多场景仍然需要将四元数转换为欧拉角进行使用。
那么,如何将四元数转化为欧拉角呢?首先需要明确的是,四元数存在多种表示方式,如单位四元数表示旋转的角度和旋转轴,而其他形式的四元数则不一定具有相同的意义。
因此,在进行四元数与欧拉角转换时,需要根据具体的物理问题和数学约定来选择适当的表示方式。
在将四元数转换为欧拉角时,通常可以采用两种方法,分别为转轴-角度法和旋转矩阵法。
对于两种方法,都需要先将四元数转换为旋转轴和旋转角度或旋转矩阵。
其中,转轴-角度法可以较为简便地进行转换,但存在无法唯一确定欧拉角的问题。
而旋转矩阵法能够确定唯一的欧拉角,但其计算较为繁琐。
对于转轴-角度法,首先需要使用四元数求出旋转轴和旋转角度。
具体方法为将四元数表示为$q=(cos\theta,sin\theta n)$,其中$\theta$为旋转角度,$n$为旋转轴的单位向量。
然后,可以通过反三角函数求出欧拉角,如pitch=$arctan(2(q_wq_x+q_yq_z),(1-2(q_x^2+q_y^2)))$,yaw=$arcsin(2(q_wq_y-q_xq_z))$,roll=$arctan(2(q_wq_z+q_xq_y),(1-2(q_y^2+q_z^2)))$。
在进行转换时,需要注意欧拉角的计算顺序,常见的有Z-Y-X顺序(即roll-pitch-yaw)和X-Y-Z顺序(即yaw-pitch-roll)等。
对于旋转矩阵法,需要求出四元数对应的旋转矩阵,然后通过将旋转矩阵分解为三个正交基向量再计算出欧拉角。
具体方法为将四元数表示为$q=(q_w,q_x,q_y,q_z)$,则其对应的旋转矩阵为:$$\begin{bmatrix}1-2(q_y^2+q_z^2) & 2(q_xq_y-q_zq_w) & 2(q_xq_z+q_yq_w)\\2(q_xq_y+q_zq_w) & 1-2(q_x^2+q_z^2) & 2(q_yq_z-q_xq_w)\\2(q_xq_z-q_yq_w) & 2(q_yq_z+q_xq_w) & 1-2(q_x^2+q_y^2)\end{bmatrix}$$然后,可以利用正交矩阵的特点来分解出三个正交基向量。
大话多旋翼飞行器--欧拉角与四元数

始先绕着 z-轴旋转 角值。然后,绕着 x-轴旋转 角值。最后,绕着 z-轴作角值 的
旋转” 我们通常使用的欧拉角是服从描述A)的。也就是绕着固定于刚体的坐标轴的三个旋转的复 合。为什么呢?因为对物体施加的转矩通常都是相对于物体自身的坐标轴的,控制上更直观 更容易。 另一个问题,欧拉角的三次旋转的旋转轴和旋转顺序。根据维基百科的说法,“在经典力 学里,时常用 zxz 顺规来设定欧拉角;照着第二个转动轴的轴名,简称为 x 顺规。另外, 还有别种欧拉角组。合法的欧拉角组中,唯一的限制是,任何两个连续的旋转,必须绕着 不同的转动轴旋转。因此,一共有 12 种顺规。例如,y 顺规,第二个转动轴是 y‐轴,时 常用在量子力学,核子物理学,粒子物理学。另外,还有一种顺规,xyz 顺规,是用在航空 航天工程学”。
a2通常用 表示,代表升降或俯仰(elevation or pitch)
a3通常用 表示,代表倾斜或横滚(bank or roll)
注意:有些书上a3用φ表示,其实 和φ是同一个字母的两种写法,本质是一样的。
小常识:
根据第一部分的介绍,可以知道,经过三个欧拉角转动后,世界坐标系下的一个矢量 rW=(xW,yW,zW)与其对应的运载体坐标系下的矢量rB=(xB,yB,zB)之间的关系可以表示为
个多体系统提供一个统一的参照坐标系。在物体上要建立一个局部坐标系,称为 BCS(Body Coordinate System),一方面用来描述物体在 GCS 内的位置和姿态,另一方面,为物体上的 点或其它坐标系提供局部的确定位置和姿态的标准。此外,在物体上可以根据需要建立其它 的坐标系,例如,为描述物体上的约束及列写约束方程,需要建立约束的坐标系。 //==========================================================================
多旋翼飞行器设计与控制_北京航空航天大学中国大学mooc课后章节答案期末考试题库2023年
多旋翼飞行器设计与控制_北京航空航天大学中国大学mooc课后章节答案期末考试题库2023年1.欧拉转动中,将地球固联坐标系绕固定点转动()次可以使它与机体坐标系的三轴指向一致。
参考答案:三次2.螺旋桨桨盘倾斜安装的好处是()参考答案:前飞时可以不倾斜机身3.多旋翼动力学模型的输出不包括()参考答案:位置4.同等条件下,飞行距离最远的飞行器是()。
参考答案:固定翼飞行器5.多旋翼超声波测距仪检测不到反射波的原因可能有哪些?()参考答案:机体俯仰角过大_机体距离地面过远_机体滚转角过大6.一个飞行控制系统(FCS)或者自动驾驶仪除了需要底层控制模块,还需要什么( )参考答案:决策模块7.遥控器上可设置的飞行参数包括()参考答案:油门的正反_摇杆灵敏度大小_摇杆功能设定8.判断系统【图片】的可观性()参考答案:可观9.对于带光流传感器的半自主自驾仪多旋翼的自稳定模式,关于水平位置通道的描述正确的是()参考答案:水平位置通道是不稳定的_水平速度通道是稳定的10.而在()实验中,输入信号可以任意选择,因此能获得更多的系统信息。
参考答案:开环11.理论上加速度计可以测量下列哪些量?()参考答案:比力_滚转角_俯仰角12.姿态控制的目标是()参考答案:_13.稳定性和飞行性能之间是什么关系()参考答案:稳定性越高飞行性能越差14.避障技术包括()参考答案:声呐系统_激光雷达15.多旋翼的建模包含哪些部分?()参考答案:刚体运动学模型_动力系统模型_控制效率模型_刚体动力学模型16.不考虑动力系统动态特性时,电机模型中可忽略的有()参考答案:电感17.一般情况下,空载电流对悬停时间的影响()参考答案:有影响,但是影响较小18.单目视觉系统()获取绝对尺度信息参考答案:不能19.下列多旋翼构型,当有任意一个旋翼失效时,哪些构型可以采用放弃偏航的方式实现安全着陆()参考答案:__20.表示材料或结构在外力作用下抵抗破坏的能力的物理量为()参考答案:强度21.当电子罗盘不健康时,则多旋翼无法实现以下哪个功能()参考答案:定点悬停22.多旋翼可靠性高主要是因为()参考答案:无刷直流电机_没有活动关节23.如果得到的误差传递函数为【图片】,其中【图片】而是频率为幅值为1的正弦信号,那么关于最终误差表述正确的是()参考答案:收敛到 024.在做系统辨识时,传递函数阶数的选取应()参考答案:尽可能小25.水平速度通道中的速度是指(),这样才能与偏航角无关参考答案:机体系下的速度26.工具箱( )在多种真实飞机的系统辨识中得到了广泛的应用参考答案:CIFER27.对于半自主自驾仪的多旋翼,遥控指令能直接控制多旋翼的以下变量( )参考答案:俯仰角和滚转角_垂直高度方向的速度_偏航角速度28.在多旋翼控制模型系统辨识中,下列()先验知识对系统辨识有用参考答案:有无速度反馈_偏航通道的模型形式_水平位置通道的模型形式_高度通道的模型形式29.系统辨识方法包括( )参考答案:最小二乘方法_子空间辨识方法_PEM(Prediction-Error Minimization)方法_最大似然率方法30.对于半自主自驾仪的多旋翼的自稳定模式,关于高度通道的描述正确的是()参考答案:高度方向的速度通道是稳定的_高度通道是不稳定的31.对于半自主自驾仪的多旋翼的自稳定模式,关于偏航通道的描述正确的是()参考答案:偏航角速度通道是稳定的_偏航通道是不稳定的32.多旋翼在悬停下主要受到()参考答案:重力_拉力33.直升机的升力主要由()控制参考答案:油门_总距操纵杆34.多旋翼“刷锅”其实指的以一个目标为中心点,飞行器围着它转圈拍摄。
无人机飞控算法-姿态估计-欧拉角-旋转矩阵-四元数

⽆⼈机飞控算法-姿态估计-欧拉⾓-旋转矩阵-四元数⽆⼈机飞控算法-姿态估计此系列记录了我理解的卡尔曼滤波从0到1的过程,从姿态估计到位置估计,我们从核⼼点⼀个个出发,并结合实际模块的应⽤来⼀⼀揭开卡尔曼滤波的神秘⾯纱。
提⽰:在系列⽂章中,我参考了⼤量CSDN,知乎,简书等其他朋友的各种⽂档资料,并从中获益良多,对此表⽰⾮常感谢!在更新的过程中不免出现很多错误,希望⼤家能够及时指出和交流,⼀起学习,⼀起进步!系列⽂章⽬录前⾔作为⼀个⾮控制类出⽣的通信⼯程师,半路出家,还是挺困难的,需要学习的知识很多,主要是卡尔曼滤波⽅⾯的,包含微积分、线性代数、概率统计论、信号与系统、控制论等等。
在⽆⼈机⾥飞控是其中重要的组成部分之⼀,⽽飞控的核⼼就是算法,主要包括姿态估计算法,导航控制算法,PID控制算法,路径规划算法等。
此系列从姿态估计算法⼊⼿,通过IMU的姿态解算来学习姿态估计算法究竟是为何物。
推荐:学习基础知识我推荐⼀下3blue1brown,在B站上可以搜索到他们的课程,讲的很⽣动,可以帮您快速理解⼀些核⼼知识。
⼀、姿态估计是什么?想象⼀下,你拿着⼀根平衡杆,⾛在独⽊桥上,你该如何操控你⼿⾥的平衡杆才能使你不掉下去呢?从主观意识着想,其实挺简单的,如果⾝⼦往左倾斜,我们就把杆⼦向右移,如果⾝⼦往右倾斜,我们就把杆⼦向左移。
要实现这个⽬的,⾸先我们是不是要知道⾝体现在究竟是左倾斜还是右倾斜呢?这就是姿态估计(Attitude Estimator)。
那如何检测姿态呢?这就需要传感器了,在⼈类的⾝上,⼤脑充当了这个⾓⾊,在机器上,我们通过惯性测量单元(IMU)来测量姿态。
⼆、惯性测量单元(IMU)1.陀螺仪陀螺仪是利⽤⾼速回转体的动量矩敏感壳体相对惯性空间绕正交于⾃转轴的⼀个或⼆个轴的⾓运动检测装置。
利⽤其他原理制成的⾓运动检测装置起同样功能的也称陀螺仪。
陀螺仪可感测⼀轴或多轴的旋转⾓速度,可精准感测⾃由空间中的复杂移动动作,因此,陀螺仪成为追踪物体移动⽅位与旋转动作的必要运动传感器。
欧拉角与四元数
四元数与旋转一.四元组基础Q(x,y,z,w),其中x,y,z用来确定旋转轴,w为旋转的角度Q=w+xi+yj+zk,i,j,k为三个虚轴的单位分量I*j=kJ*k=i;K*i=j;叉乘:c=a × b=| i j k||a1 b1 c1||a2 b2 c2|=(b1c2-b2c1,c1a2-a1c2,a1b2-a2b1)c也为一个向量,且c的长度为|a||b|sin(theta),垂直于a和b所在的平面,方向由右手法则来判定,用右手的四指先表示向量a的方向,然后手指朝着手心的方向摆动到向量b的方向,大拇指所指的方向就是向量c 的方向1.四元组相乘:Q1=w1+x1i+y1j+z1k=(w1,v1)Q2=w2+x2i+y2j+z2k=(w2,v2)Q1*Q2=(w1*w2-<v1,v2>,w1*v2+w2*v1+v1xv2)( w1+x1i+y1j+z1k)*( w2+x2i+y2j+z2k)=w1*w2-x1*x2-y1*y2-z1*z2+(W1*x2+x1*w2+y1*z2-z1-y2)i+(y1*w2+w1*y2+z1*x2-x1*z2)j+(w1*z2+z1*w2+x1*y2-y1*x2)k对于其中的轴部分,假如v1//v2,则有v1 x v2=0(平行向量的叉乘结果为0)2.四元组的点乘,点乘积为数值:Q1.*Q2=w1*w2+<v1,v2>=w1*w2+x1*x2+y1*y2+z1*z2;3.数乘s为一实数,q为四元组,则有sq=qs4.共轭p=(w,v),则p*=(w,-v)(pq)*=q*p*N(q)=w2+x2+y2+z2q-1=q*/N(q)---------------显然可得qq-1=(1,0)二.使用四元数旋转向量假如有一表示向量的四元组q=(w,v),对其应用旋转量p后的结果为:q’=pqp-1=(w,v’)从上可以看出,计算的结果q’的实部和q的实部是相等的,并且有N(v)=N(v’)如果N(q)=1,则可以令q=(cosa,usina),u也为一个单位向量,则q’是q绕u旋转2a个弧度的结果假如S(q)表示q的实部,则有2S(q)=q+q*2S(pqp-1)= pqp-1+( pqp-1)*=pqp*+(pqp*)*=pqp*+pq*p*=p(q+q*)p*=2S(q)(这里由于p是单位四元数,所以有p-1等于p*)欧拉角到四元数的转换定义pitch, yaw, roll分别为绕X轴、Y轴、Z轴的旋转弧度float p = pitch * PIOVER180 / 2.0;float y = yaw * PIOVER180 / 2.0;float r = roll * PIOVER180 / 2.0;float sinp = sin(p);float siny = sin(y);float sinr = sin(r);float cosp = cos(p);float cosy = cos(y);float cosr = cos(r);this->x = sinr * cosp * cosy - cosr * sinp * siny;this->y = cosr * sinp * cosy + sinr * cosp * siny;this->z = cosr * cosp * siny - sinr * sinp * cosy;this->w = cosr * cosp * cosy + sinr * sinp * siny;normalise();三.使用matlab进行相关计算计算两个向量v1和v2之间的旋转量四元数p,使得v1应用p后到达v2假如v1转到v2的旋转轴为v,旋转角为theta,则q=[v*cos(theta/2)sin(theta/2)]Matlab代码:function q=vector2q(v1,v2)%..normalize....len1=sqrt(v1*v1');len2=sqrt(v2*v2');v1=v1/len1;v2=v2/len2;angle=v1*v2';axis=cross(v1,v2);alen=sqrt(axis*axis');axis=axis/alen;t=acos(angle);t=t/2;q(1)=axis(1)*sin(t);q(2)=axis(2)*sin(t);q(3)=axis(3)*sin(t);q(4)=cos(t);end计算出了q之后,可以获得对应的旋转矩阵,旋转矩阵的计算Matlab里面的矩阵是以列为主顺序的function r=q2rot(q)w=q(4);x=q(1);y=q(2);z=q(3);r=zeros(3,3);r(1,1)=1-2*y*y-2*z*z;r(1,2)=2*x*y+2*w*z;r(1,3)=2*x*z-2*w*y;r(2,1)=2*x*y-2*w*z;r(2,2)=1-2*x*x-2*z*z;r(2,3)=2*z*y+2*w*x;r(3,1)=2*x*z+2*w*y;r(3,2)=2*y*z-2*w*x;r(3,3)=1-2*x*x-2*y*y;r=r';end同时,也可以根据四元数来计算欧拉角function R=q2euler(q)w=q(4);x=q(1);y=q(2);z=q(3);t11=2*(w*x+y*z);t12=1-2*(x*x+y*y);R(1)=atan2(t11,t12);t2=2*(w*y-z*x);R(2)=asin(t2);t31=2*(w*z+x*y);t32=1-2*(y*y+z*z);R(3)=atan2(t31,t32);end计算出来的欧拉角rx,ry,rz,分别为绕X轴、Y轴和Z轴的旋转角,假如有:Rotq=q2rot(q)R=q2euler(q)[rotx roty rotz]=Rotation(R)可以发现Rotq==rotz*roty*rotx从这里可以看出,上面使用四元数这样计算出来的旋转矩阵的旋转顺序分别是X轴、Y轴和Z轴的ra=pi/4;qz=[0 0 -sin(ra) cos(ra)] %绕z旋转-90度qy=[0 sin(ra) 0 cos(ra) ] %绕y旋转90度qyz=qmult(qy,qz)r=q2euler(qyz)上面的r得出的结果为r = -1.5708 0.0000 -1.5708也就是说其几何意义变成先绕X轴旋转-90度,再绕Z轴旋转-90度,而根据qy和qz的相乘我们实际进行的操作却是先绕Z轴旋转-90度,再绕Y轴旋转90度,但是结果却是这两种操作等价,这说明由四元数到欧拉角可以有多个解两个四元数,假如它们的方向是相反的,用它们作用于向量得到的新向量的值仍然相等q1=[0.024666 -0.023954 0.504727 0.862594];arm=[-8.881719 6.037597 -2.36776];q2=-q1;rot1=q2rot(q1);rot2=q2rot(q2);v1=rot1*arm'v2=rot2*arm'上面计算出来的v1等于v2四元数的余弦值为它们的内积假如余弦值小于0,则需要将其中的一个取反,因为上面我们知道一个四元数和它的反方向的四元数对一个向量起相同的作用四元数的相乘,代表旋转的累积pq=p*q;rotp=q2rot(p);rotq=q2rot(q);rotpq=q2rot(pq);rotmul=rotp*rotq;这里rotpq与rotmul相等四. OGRE中Quaternion类的几个函数1.四元数到旋转向量void Quaternion::ToRotationMatrix (Matrix3& kRot) const1 - 2*qy2 -2*qz22*qx*qy -2*qz*qw2*qx*qz +2*qy*qw2*qx*qy + 2*qz*qw 1 - 2*qx2 -2*qz22*qy*qz -2*qx*qw2*qx*qz -2*qy*qw 2*qy*qz +2*qx*qw1 - 2*qx2 -2*qy22.旋转量到四元数根据1中的表格,有:4 *(1-qx2-qy2-qz2) = 1 + m00 + m11 + m22又qw2=1-qx2-qy2-qz2,可得4 *qw2= 1 + m00 + m11 + m22这里解qw必须保证1 + m00 + m11 + m22>=0,如果不是的话,就构造其他的等式来计算,OGRE中分成两种情况,一种是m00 + m11 + m22>=0,就可以直接先解出qw,否则的采用另外的等式计算3.Local axisVector3 xAixs(void) const;取得旋转矩阵的第一列,旋转矩阵和一个向量相乘的话,第一列的数据均和向量的x分量相乘Vecotr3 yAxis(void) const;取得旋转矩阵的第二列,旋转矩阵和一个向量相乘的话,第二列的数据均和向量的y分量相乘Vecotr3 zAxis(void) const;取得旋转矩阵的第三列,旋转矩阵和一个向量相乘的话,第三列的数据均和向量的z分量相乘。
全角度欧拉角与四元数转换的方法

2.2 四元数 在刚体定点转动理论中有一个著名的欧拉定理:刚体绕固定点的任一位移,可由绕通 [5] 过此点的某一轴转过一个角度而得到 。在单位时间间隔 t 内假设刚体角速度为 ,则该 转动轴的方向 n 及绕该轴转过的角度 分别为:, 相应四元数超复数形式为:
飞行姿态的计算范文

飞行姿态的计算范文飞行姿态的计算主要涉及到以下几个方面:姿态传感器的测量、数据融合和姿态更新。
姿态传感器的测量主要通过陀螺仪、加速度计和磁力计等设备获取。
陀螺仪测量飞行器的角速度,加速度计测量重力加速度和加速度矢量,磁力计测量地磁场的矢量。
数据融合是指将来自多个传感器的数据进行融合,以提高姿态的准确度和稳定性。
姿态更新则是根据传感器测量到的数据计算出飞行器的姿态角度。
飞行姿态的计算方法主要有欧拉角法和四元数法。
欧拉角法将飞行姿态表示为绕X、Y、Z轴的三个旋转角度,即俯仰角、滚转角和偏航角。
四元数法则使用四元数来表示飞行姿态,四元数是一种四维向量,可以表示三维旋转。
四元数法相对于欧拉角法的优势在于可以避免万向锁问题,具有较好的数学性质。
根据传感器测量的数据,可以通过解析数据来计算飞行器的姿态。
例如,通过陀螺仪的角速度测量以及积分的方法可以计算出飞行器的欧拉角,即俯仰角、滚转角和偏航角。
同时,加速度计的测量可以帮助确定飞行器的俯仰角,通过磁力计的测量可以确定飞行器的偏航角。
这些角度可以通过计算方法进行数据融合,得到最终的飞行姿态。
除了基本的姿态角度之外,飞行姿态的计算还可以涉及到飞行器的位置和速度。
例如,通过速度传感器的测量可以计算飞行器的速度矢量,结合位置传感器的测量可以得到飞行器的空间位置。
这些信息对于导航和飞行控制非常重要。
总之,飞行姿态的计算是航空领域中的一个重要课题,涉及到姿态传感器的测量、数据融合和姿态更新等方面。
准确的飞行姿态计算对于飞行器的性能和稳定性具有关键的作用,对于飞行安全和导航控制具有重要意义。
浅析欧拉角与四元数

Z
p'
YБайду номын сангаас
用另一个四元数表示旋转:
X
p
Machine Perception and Interaction Group (MPIG)
欧拉角转四元数
设三次旋转对应的四元数分别为: 则: 绕x轴单位向量(1, 0, 0)旋转角度φ 绕y轴单位向量(1, 0, 0)旋转角度θ 绕z轴单位向量(1, 0, 0)旋转角度ψ
四元数的基本性质
3. 共轭
4. 模长
5.两个四元数乘积的模即为模的乘积, 这保证单位四元数 相乘后仍是单位四元数。
Machine Perception and Interaction Group (MPIG)
四元数的基本性质
6. 逆
(1) 四元数和自己的逆的乘积为实四元数1:
MPIG Seminar 0048
欧拉角和四元数
郑雪鹤
Machine Perception and Interaction Group (MPIG)
zxh@
MPIG Seminar 0048
郑雪鹤
Machine Perception and Interaction Group (MPIG)
四元数表示旋转
假设某个旋转是绕单位向量:
则描述该转动的四元数可以表示成:
反之,我们亦可通过任意一个长度为1的四元数,计算对应旋转轴与夹角
右手法则旋转
Machine Perception and Interaction Group (MPIG)
四元数表示旋转
用一个虚四元数来描述一个三维空间点:
( y)
( x)
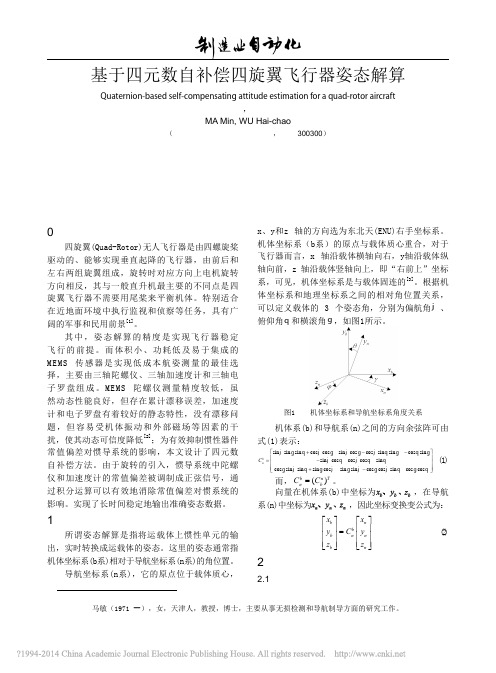
基于四元数自补偿四旋翼飞行器姿态解算_马敏
b
b wx 0 wzb b wy
T11 T12 T13 n C 记 b T21 T22 T23 ,故当已知姿态变换矩阵 T31 T32 T33
时,根据式(1)、式(5)可以求出当前姿态的四元数 以及欧拉角,其中四元数求解方程如下:
w w w 0
b z b y b x
b wx
( 1 0 )
( 6 )
其中的 wx 、 wy 和 wz 分别为姿态解算单元陀螺 仪测得的机体坐标系下x、y和z轴的角速度[5]。 设T为采样周期,那么四元数微分方程的一阶 龙格-库塔法计算式为: ( 1 1 ) 每个采样周期读取陀螺仪、加速度计和电子 罗盘的数据,对上式进行迭代运算,即可实现四 元数随时间的更新,进而求得3个姿态角。而在实 际中常值偏差是变化的,即在一次启动后随着陀 螺仪、加速度计和电子罗盘运转的时间的增长, 惯性测量器件的常值偏差也缓慢的变化到导航系 统精度无法允许的程度。 2.2 四元数自补偿算法研究 在传统的惯性导航系统中,惯性测量元件与 运载体固连,它们之间没有相对运动。四元数自 动补偿方法是将安装有陀螺仪、加速度计和电 子罗盘的惯导系统相对机体坐标系旋转,使惯性 器件常值偏差沿着机体系敏感轴方向呈周期性变 化。可有效抑制零位误差对系统的影响。 由于自补偿算法在三个轴方向具有相同的应
2 2 2 q0 q12 q3 q2 2(q1q2 q0 q3 ) 2(q1q3 q0 q2 ) b 2 2 2 Cn 2(q1q2 q0 q3 ) q0 q2 q3 q12 2(q2 q3 q0 q1 ) (5) 2 2 2 2(q1q3 q0 q2 ) 2(q2 q3 q0 q1 ) q0 q12 q3 q2
欧拉角与四元数之间的转换数学公式

欧拉角与四元数之间的转换数学公式欧拉角和四元数是两种广泛应用于机器人、航空、姿态控制等领域的旋转表示方法。
它们之间的转换是非常有用的,在实际应用中经常需要将一个旋转表示方法转换成另一个。
本文将介绍欧拉角和四元数之间的转换数学公式,以及它们的应用。
欧拉角是一种旋转表示方法,它将旋转分解成三个轴向旋转的组合。
欧拉角共有12种表示方式,其中最常用的是ZYZ方式。
它将一个旋转分解为绕Z轴旋转一个角度,绕新的Y轴旋转一个角度,再绕新的Z轴旋转一个角度。
欧拉角的转换公式如下:$$begin{bmatrix} alpha beta gamma end{bmatrix} =begin{bmatrix} atan2(r_{23},r_{33}) asin(-r_{13})atan2(r_{12},r_{11}) end{bmatrix}$$其中,r是旋转矩阵,α、β、γ是绕Z、Y、Z轴旋转的角度。
四元数是一种用四元组表示旋转的方法。
它比欧拉角更为简洁、稳定,并且没有万向锁问题。
四元数的转换公式如下:$$begin{bmatrix} q_w q_x q_y q_z end{bmatrix} =begin{bmatrix} cos(theta/2) sin(theta/2) * n_x sin(theta/2) * n_y sin(theta/2) * n_z end{bmatrix}$$其中,q是四元数,θ是旋转角度,n是旋转轴向量。
四元数的逆转换公式如下:$$begin{bmatrix} theta n_x n_y n_z end{bmatrix} = begin{bmatrix} 2 * acos(q_w) q_x / sqrt{1-q_w^2} q_y /sqrt{1-q_w^2} q_z / sqrt{1-q_w^2} end{bmatrix}$$ 欧拉角和四元数之间的转换可以通过以下公式实现:$$begin{bmatrix} q_w q_x q_y q_z end{bmatrix} = begin{bmatrix} cos(alpha/2) * cos(beta/2) * cos(gamma/2) + sin(alpha/2) * sin(beta/2) * sin(gamma/2) sin(alpha/2) * cos(beta/2) * cos(gamma/2) - cos(alpha/2) * sin(beta/2) * sin(gamma/2) cos(alpha/2) * sin(beta/2) * cos(gamma/2) + sin(alpha/2) * cos(beta/2) * sin(gamma/2) cos(alpha/2) * cos(beta/2) * sin(gamma/2) - sin(alpha/2) * sin(beta/2) * cos(gamma/2) end{bmatrix}$$$$begin{bmatrix} alpha beta gamma end{bmatrix} = begin{bmatrix} atan2(2(q_w*q_x+q_y*q_z),1-2(q_x^2+q_y^2)) asin(2(q_w*q_y-q_z*q_x))atan2(2(q_w*q_z+q_x*q_y),1-2(q_y^2+q_z^2)) end{bmatrix}$$ 通过欧拉角和四元数之间的转换,可以方便地在不同领域应用中进行旋转表示的转换。
基于四元数的四轴飞行器姿态控制

基于四元数的四轴飞行器姿态控制荆学东;潘翔【摘要】为了实现四轴飞行器的姿态控制,建立四轴飞行器四元数运动学方程,给出了四元数微分方程的解析解和数值解,在此基础上求解出欧拉角.四轴飞行器采用串级PID控制算法,以欧拉角作为系统外环,补偿后的角速度作为系统内环.通过Matlab/Simulink仿真,对比单级PID控制效果,验证了算法的可靠性.最后,搭建了飞行器试验平台,在STM32飞控板上编程实现算法.实验证明,该控制系统较单级PID具有响应速度快,超调量小等优点,基本满足室外飞行要求.【期刊名称】《现代电子技术》【年(卷),期】2018(041)016【总页数】4页(P116-119)【关键词】四轴飞行器;四元数法;PID控制算法;串级PID;姿态控制;微分方程【作者】荆学东;潘翔【作者单位】上海应用技术大学,上海 201418;上海应用技术大学,上海 201418【正文语种】中文【中图分类】TN967.6-34;TP273四轴飞行器与普通的飞行器相比具有结构简单、故障率低及单位体积能够产生更大升力等优点,在军事、民用和科技领域发挥着越来越重要的作用,非常适合在狭小空间内执行任务。
因此四旋翼飞行器具有广阔的应用前景,吸引了众多科研人员,成为国内外新的研究热点。
本文通过建立四轴飞行器四元数运动学方程,得到该方程的数值解,再将四元数转换为欧拉角,避免了欧拉角法运算量大、存在奇异点的问题。
在控制算法方面,采用串级PID控制,增加了系统的可靠性和鲁棒性。
通过Matlab/Simulink仿真,并搭建四轴飞行器实验平台,验证了算法的正确性。
1 姿态描述与姿态角表示1.1 四轴飞行器姿态描述为了更好地描述四轴飞行器的姿态,建立如图1所示的坐标系,分别为参考坐标系n系、机体坐标系b系。
参考坐标系的原点为机体的旋转中心,机体坐标系的原点为机体的中心。
图1 参考坐标系和机体坐标系Fig.1 Reference coordinate system and body coordinate system飞行器在空中的姿态用偏航角ϕ、俯仰角θ、翻滚角φ表示,通过改变四个电机的转速改变飞行器的飞行姿态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在四轴或者其他飞行器中, 常用上图中的三种坐标系固连在飞行器质心上, 作为飞行器载体 坐标系,通过计算载体坐标系与固连于大地上的参考坐标系(有些文献中叫世界坐标系, world frame) 之间的位置关系, 进而得到飞行器的当前姿态。 如下图中, 宾夕法尼亚的四轴, 就是使用 B3 坐标系作为载体坐标系(body frame)
大话多旋翼飞行器—欧拉角与四元数
Y Y’ C A
y’
X’ B’
C’ O
r
X’
y
B X
x
如图所示,假设坐标系从 OXY 绕 Z 轴负方向逆时针旋转 θ 角,变为坐标系 OX’Y’。向量 OA 在 OXY 坐标系下的坐标为 (x,y) ,在 OX’Y’坐标系下的坐标为 (x’,y’) 。 下面计算 (x,y) 与 (x’,y’) 的关系。
欧拉角的12种顺序分别为: X‐Z‐X, X‐Y‐X, Y‐X‐Y, Y‐Z‐Y, Z‐Y‐Z, Z‐X‐Z, X‐Z‐Y, X‐Y‐Z, Y‐X‐Z, Y‐Z‐X, Z‐Y‐X, Z‐X‐Y。 对于同样一个姿态,用不同的欧拉角顺序描述时,对应的欧拉角是不同的。但它们都是正确 的。注意,三个欧拉角只是描述绕三个轴转过了三个角度,只有将欧拉角应用于惯性导航领 域时才有偏航角、俯仰角和横滚角的概念。 知道了欧拉角的物理意义, 那么怎样在数学上用欧拉角来计算姿态呢? (假设欧拉角已知的 前提下) 。这样说好像不太对劲。换种说法,知道了坐标系2相对于坐标系1旋转的欧拉角, 已知一个向量在坐标系1下的坐标,如何求这个向量在坐标系2下的坐标呢? 首先明确一下我们的坐标系以及欧拉角的顺序。
x x ' cos y ' sin
x cos 或 y x ' sin y ' cos y sin
sin x ' cos ' ,令 A cos y sin sin x cos ,令 B cos y sin
xB yB zB yW xW zW
如上图所示,建立载体坐标系B和世界坐标系W(世界坐标系始终不运动,是静态的参照, 载体坐标系相对世界坐标系运动,运动包括平移和转动,对于姿态解算来说,我们只考虑转 动),这种世界坐标系有的地方也叫做北-东-地坐标系。关于绕轴旋转的正方向,按照《捷 联惯性导航技术》一书中的规定,从原点看,沿每根轴的顺时针方向定义为这根轴的正向转 动。简单点说,就是服从右手定则(拇指指向轴的正方向,其余四指握紧的方向就是旋转的 正方向)。上图中所标示的就是旋转的正方向。 我们使用Z-Y-X欧拉角描述载体坐标系B相对于世界坐标系W的姿态(由于运载体坐标系是 固连于你要计算姿态的那个东西上, 比如飞行器或者空鼠, 所以欧拉角描述的就是那个东西 相对于世界坐标系的姿态),根据前文的描述,Z-Y-X欧拉角就是指:初始状态B系与W系 重合,然后B系先绕zB轴旋转一个角度a1,然后绕yB轴旋转一个角度a2,然后绕xB轴旋转一 个角度a3,得到了B系(也就是飞行器或其他东西的最终姿态)。这种欧拉角顺序有的书上 称为“航空次序欧拉角(aerospace sequence Euler angles)”。 其中, a1通常用 表示,代表方向或偏航(heading or yaw) a2通常用 表示,代表升降或俯仰(elevation or pitch) a3通常用 表示,代表倾斜或横滚(bank or roll) 注意:有些书上a3用φ表示,其实 和φ是同一个字母的两种写法,本质是一样的。
Misalignment”则使用的是B1坐标系,如下图
使用哪种坐标系, 并没有严格的规定, 可以根据自己的习惯, 或者相关领域的要求进行选择。 《捷联惯性导航技术》一书中使用B1坐标系,如下图,xb指向机头方向,yb垂直于xb向右, zb垂直机身向下。我也是使用的这种坐标系。
xb yb zb
//===================================================================== 欧拉角 从一个坐标系到另一个坐标系的变换, 可以通过依次绕不同的坐标轴的3次连续转动来定义。 从物理角度看,欧拉角表示法可能是最简单的方法之一。(出自《捷联惯性导航技术》) 注意一个问题:维基百科上关于欧拉角的动态定义描述如下 “我们也可以给予欧拉角两种不同的动态定义。 一种是绕着固定于刚体的坐标轴的三个旋转 的复合;另外一种是绕着实验室参考轴的三个旋转的复合。用动态的定义,我们能更了解, 欧拉角在物理上的含义与应用。 特别注意, 以下的描述, XYZ 坐标轴是旋转的刚体坐标轴; 而 xyz 坐标轴是静止不动的实验室参考轴。 A) 绕着 XYZ 坐标轴旋转:最初,两个坐标系统 xyz 与 XYZ 的坐标轴都是重叠著的。 开始先绕着 Z-轴旋转 角值。然后,绕着 X-轴旋转 角值。最后,绕着 Z-轴作角值
同理,我们可以得到绕 Y 轴旋转 y 后,两个坐标系下同一个向量的坐标关系
x cos y y 0 sin y z
0 sin y x ' x ' cos y 1 0 y' 和 y' 0 ' ' 0 cos y z z sin y
x cos y sin z 0
sin cos 0
0 x ' x ' cos y ' y ' sin 0 和 ' ' 0 1 z z
0 sin y x 1 0 y z 0 cos y
以及绕 X 轴旋转 x 后的关系
0 x 1 y 0 cos x z 0 sin x
' ' 0 x x 1 ' ' sin x y 和 y 0 cos x ' ' 0 sin x cos x z z
sin cos sin cos
x ' x cos y sin y ' x sin y cos
或
x ' cos ' y sin
可以看出 A=B’,互为转置矩阵 推广到 3 维的情况,有
0 cos sin 0 sin cos
0 sin cos 1 0 sin 0 0 cos
sin cos 0
0 xW W 0 y W 1 z sin xW W sin cos y W cos cos z
cos cos sin sin cos cos sin cos sin cos sin sin
用简化的写法为 r CW r
B B W B
cos sin sin sin sin cos cos cos sin sin sin cos
ˆ、y ˆ 的正方 ˆ 及z ˆ ,所谓右手坐标系是指伸出右手,四指先指向 x 的符号可以人为规定,如 x
ˆ 的正向,此时拇指指向 z ˆ 的正向的坐标系,若指向 z ˆ 的负向,则为 向,再转过 90 度绕向 y
左手坐标系,我们所使用的都是右手坐标系。 通常在大地上要建立一个全局坐标系,称为 GCS(Global Coordinate System) ,用来对整 个多体系统提供一个统一的参照坐标系。在物体上要建立一个局部坐标系,称为 BCS(Body Coordinate System) ,一方面用来描述物体在 GCS 内的位置和姿态,另一方面,为物体上的 点或其它坐标系提供局部的确定位置和姿态的标准。 此外, 在物体上可以根据需要建立其它 的坐标系,例如,为描述物体上的约束及列写约束方程,需要建立约束的坐标系。 //==========================================================================
0
0 x sin x y cos x z
============================================================================== 坐标系小知识: 坐标系是指由固定在一起的三个相互垂直的单位矢量组成的右手坐标系, 三个单位矢量
0 x ' x ' cos z ' ' 0 y 和 y sin z ' ' 0 1 z z
sin z cos z 0
0 x 0 y 1 z
小常识:
根据第一部分的介绍,可以知道,经过三个欧拉角转动后,世界坐标系下的一个矢量 r =(x ,yW,zW)与其对应的运载体坐标系下的矢量rB=(xB,yB,zB)之间的关系可以表示为
W W
x B 1 0 B y 0 cos zB 0 sin
的旋转。 B) 绕着 xyz 坐标轴旋转:最初,两个坐标系统 xyz 与 XYZ 的坐标轴都是重叠著的。开 始先绕着 z-轴旋转 角值。然后,绕着 x-轴旋转 角值。最后,绕着 z-轴作角值 的
旋转” 我们通常使用的欧拉角是服从描述A)的。也就是绕着固定于刚体的坐标轴的三个旋转的复 合。 为什么呢?因为对物体施加的转矩通常都是相对于物体自身的坐标轴的, 控制上更直观 更容易。 另一个问题,欧拉角的三次旋转的旋转轴和旋转顺序。根据维基百科的说法,“在经典力 学里,时常用 zxz 顺规来设定欧拉角;照着第二个转动轴的轴名,简称为 x 顺规。另外, 还有别种欧拉角组。合法的欧拉角组中,唯一的限制是,任何两个连续的旋转,必须绕着 不同的转动轴旋转。因此,一共有 12 种顺规。例如,y 顺规,第二个转动轴是 y‐轴,时 常用在量子力学,核子物理学,粒子物理学。另外,还有一种顺规,xyz 顺规,是用在航空 航天工程学” 。