自动洗车机移动机械操作臂毕业设计
自动洗车机总体设计 毕业设计说明书
摘要:随着经济的发展,生活水平的提高,汽车已经逐渐走进我们的日常生活,从公交车到小型汽车,汽车给人们带来方便的同时,如何方便快捷将汽车清洗干净也成为了人们日常需要解决的难题。
本课题就针对人们生活中所遇到的这一难题,提出一个合理的结果方案。
关键词:自动洗车机总体设计Summary:With economic development, improvement of living standards, the car has gradually into our daily lives. From small cars to buses, cars bring convenience to people. At the same time, how convenient wash the car has become the people's daily problems to be solved.This paper will address this problem encountered by people living in the proposed program a reasonable result.Keywords:automatic washing machine overall design目录摘要 (1)1.前言 (4)2.方案的拟定 (6)2.1 隧道式自动洗车机的工作原理及主要特点 (6)2.2往复式自动洗车机的工作原理及主要特点 (7)2.3 水斧式无接触自动洗车机的工作原理及主要特点 (10)3.方案的选择及可行性分析 (13)4.方案的设计 (16)4.1自动洗车机的主要组成部分及主要技术参数 (16)4.2自动洗车机的清洗系统的设计 (17)4.3自动洗车机的水处理和水循环系统的设计 (18)4.4自动洗车机的其他方面的设计及相关计算说明 (19)5.结束语 (21)6.感谢 (21)7.参考文献 (23)8.附录 (24)1 前言随着经济的的飞速发展,科学技术的不断进步,人们的对日常生活的各项要求也越来越严格,尤其在通行方面,人们的要求更是越来越高。
全自动洗车机毕业设计(3)
第3章 电气元件的选型3.1 低压断路器的选择低压断路器(也称自动开关或空气开关)是一种不仅可以接通和分断正常负荷电流和过负荷电流,还可以接通和分断短路电流的开关电器。
低压断路器在电路中除起控制作用外,还具有一定的保护功能,如过负荷、短路、欠压和漏电保护等。
低压断路器可以手动直接操作和电动操作,也可以远方遥控操作。
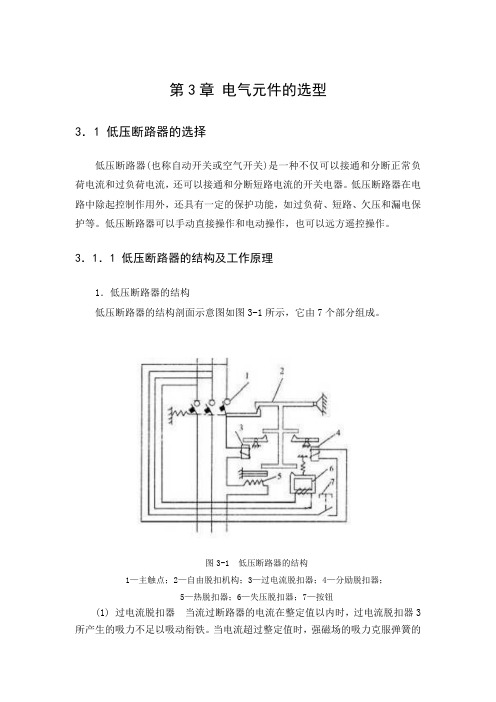
3.1.1 低压断路器的结构及工作原理1.低压断路器的结构低压断路器的结构剖面示意图如图3-1所示,它由7个部分组成。
图3-1 低压断路器的结构1—主触点;2—自由脱扣机构;3—过电流脱扣器;4—分励脱扣器;5—热脱扣器;6—失压脱扣器;7—按钮(1) 过电流脱扣器 当流过断路器的电流在整定值以内时,过电流脱扣器3所产生的吸力不足以吸动衔铁。
当电流超过整定值时,强磁场的吸力克服弹簧的拉力拉动衔铁,使自由脱扣机构动作,断路器跳闸,实现过流保护。
(2) 失压脱扣器 失压脱扣器6的工作过程与过流脱扣器恰恰相反。
当电源电压在额定电压时,失压脱扣器产生的磁力足以将衔铁吸合,使断路器保持在合闸的状态。
当电源电压下降到低于整定值或者降为零时,在弹簧的作用下衔铁释放,自由脱扣机构动作而切断电源。
(3) 分励脱扣器 分励脱扣器4用于远距离操作。
在正常工作时,其线圈是断电的;在需要远程操作时,按动按钮使线圈通电,其电磁机构使自由脱扣机构动作,断路器跳闸。
2.低压断路器的工作原理低压断路器的主触点是靠手动操作或电动合闸的。
主触点闭合后,自由脱扣机构将主触点锁在合闸位置上。
过电流脱扣器的线圈和热脱扣器的热元件与主电路串联,欠电压脱扣器的线圈和电源并联。
当电路发生短路或严重过载时,过电流脱扣器的衔铁吸合,使自由脱扣机构动作,主触点断开主电路。
当电路过载时,热脱扣器的热元件发热使双金属片上弯曲,推动自由脱扣机构动作。
当电路欠电压时,欠电压脱扣器的衔铁释放。
也使自由脱扣机构动作。
分励脱扣器则作为远距离控制用,在正常工作时,其线圈是断电的,在需要距离控制时,按下起动按钮,使线圈通电,衔铁带动自由脱扣机构动作,使主触点断开。
全自动洗车机毕业设计(1)

目 录摘 要 (I)Abstract (II)第1章 洗车机发展情况综述 (1)1.1 前言 (1)1.2 国内外洗车机发展的现状 (1)1.2.1 国内洗车机发展的现状 (1)1.2.2 国外洗车机发展的现状 (3)1.3 洗车机的优点和不足 (5)第2章 总体方案设计....................................... 错误!未定义书签。
2.1 电脑洗车机概述 ................................... 错误!未定义书签。
2.2 方案的拟定 ....................................... 错误!未定义书签。
2.2.1 隧道式电脑洗车机 ........................... 错误!未定义书签。
2.2.2 往复式电脑洗车机 ........................... 错误!未定义书签。
2.3 方案选择 ......................................... 错误!未定义书签。
2.4 方案分析 ......................................... 错误!未定义书签。
2.5 方案设计 ......................................... 错误!未定义书签。
2.5.1 洗车机的组成及技术参数 ..................... 错误!未定义书签。
2.5.2 洗车机控制过程的设计 ....................... 错误!未定义书签。
第3章 电气元件的选型..................................... 错误!未定义书签。
3.1 低压断路器的选择 ................................. 错误!未定义书签。
3.1.1 低压断路器的结构及工作原理 ................. 错误!未定义书签。
全自动洗车机毕业设计(2)
第2章 总体方案设计2.1 电脑洗车机概述电脑洗车机是利用电脑控制毛刷和高压水枪来清洗汽车的一种设备。
主要由电路、气路、水路和机械部分构成。
电脑洗车是用大量的流动水冲洗车身,洗完后还会经过机器自动风干程序,可以把存留在车身所有缝隙里的水流全部吹出来,起到了保护汽车内部部件的作用,同时完全避免了泥沙划伤车漆的现象。
电脑洗车机技术先进,造型美观,有多种全自动洗车程序可供选择。
它通过光电系统检测,经电脑分析计算出各种动作的最佳位置和力度,达到最佳的洗车效果。
具有洗车效果好,效率高,节水等特点。
电脑洗车机按其工作方式可分为隧道式和往复式两种。
隧道式电脑洗车机根据功能的多少及先进程度,分为多个等级。
比较基础的是清水冲洗、皂液冲刷、冷风吹干、人工再行擦拭的方式。
在这个基础上,还有多个升级版,有的有两套吹风;有的加上热风;有的可以同时冲洗底盘;还可以在洗车和吹干之间再加一个光亮剂喷洗门,喷出光亮剂在吹干时使其固化,也就是所谓的蜡洗。
最先进的机型已经开始采用数字信号传输命令,指导机器完成各个程序和动作。
往复式电脑洗车机是一种最初级的洗车设备。
当车开进设备后,汽车位置固定不动,设备的龙门带着洗车用具,前后移动,完成洗车的各个程序。
它的优点是设备的购进价格相对较低,大约是隧道式机器的二分之一;还有一个长处就是它相对于隧道式机器,工作时的实际占地面积小,甚至可以再一个较大的房间里完成洗车。
对于前期资金较紧张或店内面积较小的投资者比较适合。
2.2 方案的拟定2.2.1 隧道式电脑洗车机1. 隧道式电脑洗车机工作原理:洗车机不动,汽车由机械牵引或自行缓慢通过洗车机的工作区域,洗车机通过各种检测设备反馈的信息,按照相应的指令程序自动运行,达到清洗汽车的工作方式。
按清洗车型又可分为:大巴式洗车机、无轨电车(地铁、旅游列车)清洗机等。
最大的优点是清洗速度快,最快可1分钟清洗一台车,并且可以连续不段的对车进行清洗。
适合大型洗车场,会员制洗车场,大型公交停车站或大型停车场复合洗车等。
全自动洗车机毕业设计(4)

第4章 电气控制系统电路设计4.1 电动机的选择电动机的选择包括电动机的种类、功率、电压、形式和转速等。
从种类选择上来讲,电子驱动系统主要有直流驱动控制系统和交流驱动控制系统。
直流驱动控制系统以直流电动机为动力,交流驱动控制系统以交流电动机为动力。
由于直流电动机具有良好的调速性能,一般用于控制精度和要求比较高的设备。
常用的交流电动机有异步电动机和同步电动机两类。
异步交流电动机与直流电动机相比较,具有结构简单、价格便宜、运行可靠、坚固耐用、维修方便等特点。
所以选择异步交流电动机。
本系统共需要7台电动机。
其中包括裙刷旋转电动机2台,侧刷旋转电动机4台,水泵电动机1台。
根据水泵的流量和扬程的需要,在选择水泵时,选为Y 系列三相异步电动机。
主水泵电机功率为3KW,而根据工况的要求,本系统其余电机也均选用交流异步电动机。
汽车清洗机中的电动机的功率的选用,一是取决于各机构完成加工工艺中消耗的有效功率;二是取决于传动系统中消耗在摩擦上的功率;三是取决于克服各种机构惯性而消耗的功率,一般情况下无法精确计算,但通过参考其他汽车清洗机的情况,采用类比方法,本系统确定选用的电动机型号为Y3-200L2-6E,额定电压为380V。
侧刷电机为0.55KW,裙刷电机为0.37KW的交流异步电动机。
额定功率相同的电动机,转速高、体积小、造价低,但如果输出转速要求较低,则减速机构越复杂,成本也会上升。
综合考虑通道式电脑洗车机的实际情况,选定电动机的额定转速为1500r/min。
4.2主电路的设计公交车清洗设备需要控制7台电动机的运行,每台电动机只需要控制启动、停止即可。
现以其中一台电动机为例,电动机启动、停止控制电路如图4-1所示。
图4-1 主电路控制图公交车清洗设备供电电源为三相380V交流电。
主电路电源开关根据清洗设备在最大功耗状态下的峰值电流,选择低压断路器QA9,完成过载、短路及欠电压保护功能。
电动机MA1由接触器QA11控制启动和停止。
基于S7200PLC的自动洗车机操纵系统设计毕业设计
基于S7-200PLC的自动洗车机操纵系统设计目录摘要.................................. 错误!未定义书签。
第一章自动洗车机的介绍.................. 错误!未定义书签。
第二章PLC概述.......................... 错误!未定义书签。
PLC简介 ............................. 错误!未定义书签。
PLC的特点 ........................... 错误!未定义书签。
PLC的功能 ........................... 错误!未定义书签。
PLC的结构与工作原理.................. 错误!未定义书签。
PLC的分类 ........................... 错误!未定义书签。
第三章方案设计 ......................... 错误!未定义书签。
设计任务与要求....................... 错误!未定义书签。
编程元件地址分派..................... 错误!未定义书签。
外部引脚散布......................... 错误!未定义书签。
操纵程序流程图....................... 错误!未定义书签。
操纵程序设计思路..................... 错误!未定义书签。
系统操纵程序......................... 错误!未定义书签。
第四章系统调试及结果分析................ 错误!未定义书签。
设计心得................................. 错误!未定义书签。
参考文献................................. 错误!未定义书签。
摘要随着我国汽车保有量的迅速提高,汽车清洗行业迎来了一个重要的进展机缘,自助洗车机作为洗车工作必不可少的设备,其清洗成效,清洗速度,清洗本钱和对节水和环境爱惜的要求,成为其开发和生产必需要考虑的内容。
智能清洗车(机械部分)的设计_毕业设计

智能清洗车(机械部分)的设计目录摘要 (1)关键字 (1)Abstract (1)Key words (2)引言 .................................................... 错误!未定义书签。
1 智能清洗车的发展与研究 (3)1.1 国内外清洗技术的发展现状 (3)1.2 理论依据 (3)1.3 设计的目的及意义 (3)1.4 设计研究的方案及内容 (4)1.5 本设计的主要创新点 (4)1.6 本设计的主要适用范围 (4)1.7 设计的预期结果 (5)2 智能清洗车的工作原理及基本结构组成 (5)2.1 智能清洗车的工作原理 (5)2.2 基本结构组成 (5)3 智能清洗车主要结构的设计选择 (6)3.1 滚刷工作的电机的选择 (6)3.2 带型及带轮的选择 (6)3.3 带动滚刷上下往复运动液压缸的选择 (7)4 智能清洗车的结构设计 (8)4.1 钢丝滚刷轴的设计 (8)4.1.1 滚刷轴的计算 (8)4.1.2 轴的结构设计 (9)4.1.3 钢丝滚刷的选定及固定 (11)4.2 喷水系统的设计 (12)4.3 叉车结构设计 (13)4.4 垃圾回收装置的设计 (14)4.5 辅助导向装置设计 (16)参考文献 (17)附录 (18)致谢 (19)智能清洗车结构的设计机械电子工程专业学生韦忠爽指导教师杨桂林摘要:本次设计的题目是智能清洗车结构的设计,包括清洁工作部分、提升装置、垃圾回收装置,以及各零部件的选择和校核。
该智能清洗车是利用对高温、高压蒸汽的特殊控制,配合钢丝滚刷的清洁作用对墙面粘贴的纸类小广告进行清理,再利用回收装置对残留垃圾进行回收,能在确保清洁效果的同时,最大限度减少用水量和对墙面的损害。
同时,车辆配置垃圾回收装置,可以快速收集清洗过程产生的碎纸废水,提高了清洁效率,节省了人力物力。
大体步骤如下:首先由位于车体前部的高温蒸汽喷洒装置向目标喷洒蒸汽,起到对目标的湿润的作用,然后利用钢丝滚刷对目标进行机械打磨,使目标粉碎完全脱离地面,最后由车体尾部的清扫回收装置完成对残留垃圾的清扫和回收任务。
成人本科清洗机手臂毕业论文(机械部分)
成人本科清洗机手臂毕业论文(机械部分)清洗机手臂是清洗机的核心部件之一,它负责在清洗过程中对被清洗物体进行持续的喷洒水流。
该手臂的设计和制造对于清洗机的性能和效率具有重要的作用。
本文旨在探讨成人本科清洗机手臂的机械设计及制造工艺,以满足清洗机在实际工作中的需求。
一、设计要求清洗机手臂的设计要求如下:1. 功能要求:清洗机手臂需要能够在清洗过程中对被清洗物体进行持续喷洒水流,喷水流量需要能够根据被清洗物体的大小、材质以及清洗需要进行调节。
2. 结构要求:清洗机手臂需要呈现出可重复性、准确性和稳定性,可以适应各种不同的工作环境和天气条件,同时具有耐磨损、耐腐蚀的特点。
3. 外观要求:清洗机手臂需要美观大方,同时具有易于清洗、易于维护的特点。
二、设计方案1. 结构设计清洗机手臂采用联动式结构,由锥形喷嘴和三段折臂组成。
设计了两个连杆,在喷头部位转动,控制喷头的上下运动,控制喷水高度。
2. 传动设计清洗机手臂采用单一传动,通过马达传动双旋转关节带动折臂实现连续喷射。
3. 材料选用手臂需要具备高强度、抗疲劳、耐腐蚀等特性。
所选材料为铝合金,具有热膨胀系数小、强度高等特点。
4. 控制系统清洗机手臂的控制系统主要负责喷头的运动控制以及喷水流量的调节。
该系统由PLC和伺服电机组成,可根据设定的清洗要求进行自动化控制。
三、工艺制造1. 零部件加工首先需要制造喷头、折臂和双旋转关节等零部件,各零部件制造时必须精度高,百分之一毫米的误差都会影响手臂的定位和喷射。
2. 组装流程喷头、折臂和双旋转关节需要通过精度配合的方式完成组装,确保喷头能够在折臂上灵活转动,在使用时能够调节喷水高度。
3. 测试与调节组装完成后需要进行测试和调节,包括喷水流量、喷水高度、喷水角度等参数的测试和调节,确保手臂在使用过程中达到预期效果。
四、总结本文主要介绍了清洗机手臂的机械设计与制造工艺,针对清洗机手臂的功能、结构、外观等要求提出了相应的设计方案,并介绍了手臂的工艺制造流程。
毕业论文基于PLC的自动洗车机系统设计

毕业论文基于PLC的自动洗车机系统设计摘要随着我国汽车持有量的迅速提高,汽车清洗业迎来了一个重要的发展机遇,自动洗车机作为洗车的必要设备,其清洗效果、清洗速度、清洗成本以及对节水和环保的要求,成为其开发和生产必须考虑的内容。
本文通过对汽车清洗设备的功能要求和主要机构的运行过程分析,确定了自动洗车机的总体设计方案,并对水循环系统进行了简单设计。
针对自动洗车机的特点,采用电力和气压两种驱动方式,为后续精密控制顶刷、小侧刷、大侧刷和吹干系统的运行满足仿形要求创造了条件。
在控制部分,采用可编程控制器,根据自动洗车机的工艺流程和控制要求对该控制系统进行了硬件设计和软件编程。
可编程控制器选取三菱公司的FX1N系列可编程控制器,采用步进顺控指令及梯形图编程法,实现自动洗车机的传动和控制要求,来满足其高效、可靠、环保和成本低的要求。
关键词:自动洗车机,可编程控制器,梯形图,状态转移ABSTRACTAlong with the rapid increase in car holding car wash industry is facing an important opportunity for development, automatic washing machine for washing the necessary equipment, the cleaning effect of cleaning rate and cleaning costs as well as water-saving and environmental protection requirements, as its development and production of content that must be considered.Based on the functional requirements of car wash equipment and the main body of the running process analysis, to determine the overall design of the automatic washing machine program, and the water cycle system is a simple design. Features for automatic washing machine, driven by power and pressure are two ways to follow-up precision control of the top brush and small side brush, side brush and blow-dry large operation of the system created the conditions to meet the profile requirements. In the control part, using programmable controllers, automatic washing machine according to the process and control requirements of the control system hardware and software design. Select Mitsubishi PLC programmable controller FX1N series, along with control commands, and step ladder programming method for automatic washing machine drive and control requirements, to meet its efficiency, reliability, environmental protection and low cost requirements .Keywords: automatic washing machine, PLC, ladder diagram, state transition目录摘要 (I)ABSTRACT ....................................... 错误!未定义书签。
全自动洗车机毕业设计(6)
第6章 软件系统设计6.1 PLC程序语言在PLC的发展初期,选择控制系统首先应做出的重要决定是选择PLC的生产厂家。
之后,用户就必须应用该厂家的软件及编程方法,选择的自由度比较小。
由于不同的厂家的PLC具有不同的编程语言,各个厂家之间的PLC无法兼容,这样就给PLC的普及带来了一定的困难。
国际电工委员会(IEC)于1994年月公布了专门用于PLC编程的标准—IEC1131-3,该标准介绍了5种PLC编程语言的表达方式:顺序功能表图(Sequential function chart)、梯形图(Ladder diagram)、(Function block diagram)、指令表(Instruction list)和结构文本(Structured text)。
梯形图(LD)和功能块图(FBD)是图形语言,指令表(IL)和结构文本(ST)是文字语言,而顺序功能表图(SFC)是一种结构块控制程序流程图。
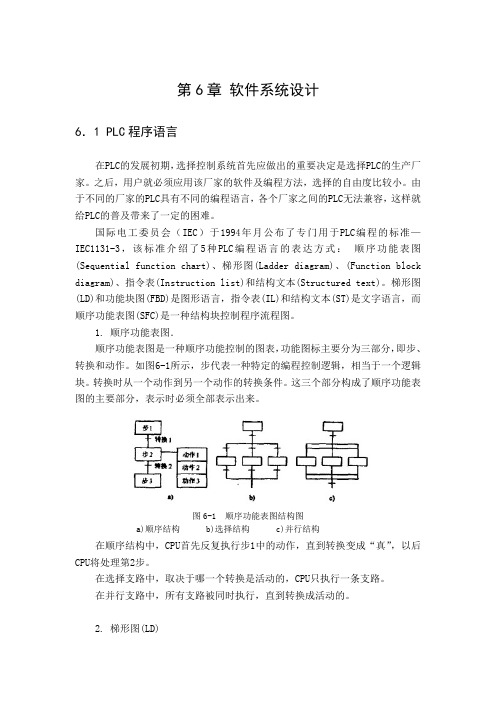
1. 顺序功能表图.顺序功能表图是一种顺序功能控制的图表,功能图标主要分为三部分,即步、转换和动作。
如图6-1所示,步代表一种特定的编程控制逻辑,相当于一个逻辑块。
转换时从一个动作到另一个动作的转换条件。
这三个部分构成了顺序功能表图的主要部分,表示时必须全部表示出来。
图6-1 顺序功能表图结构图a)顺序结构 b)选择结构 c)并行结构在顺序结构中,CPU首先反复执行步1中的动作,直到转换变成“真”,以后CPU将处理第2步。
在选择支路中,取决于哪一个转换是活动的,CPU只执行一条支路。
在并行支路中,所有支路被同时执行,直到转换成活动的。
2. 梯形图(LD)一般学过电气控制的人对继电器控制都比较熟悉,相对继电气控制,梯形图更加简单。
PLC里面的梯形图全部是从电气控制的继电器控制发展演变过来的,基本思想一致,主要区别存在于表示方式和使用方法上。
常规继电气控制中使用的内部继电器、定时/计数器等在PLC中都有软件实现的。
自动洗车机毕业论文
自动洗车机毕业论文基于自动洗车机的PLC系统的设计摘要随着我国汽车保有量的迅速提高,汽车清洗行业迎来了一个重要的发展机遇,自动洗车机作为洗车工作必不可少的设备,其清洗效果,清洗速度,清洗成本以及对节水和环境保护的要求,成为其开发和生产必须要考虑的内容。
关键词:自动洗车机,PLC,控制系统,梯形图,硬件及软件IManagement System For automatic carwashing machineABSTRACTAs the amount of car increases very quickly, the service trades of car are facing a very important chance. Because Car washer is the most important equipment in the process of washing car, these questions must be reflected on in the process of the design and the manufacture of the automatic car washer, such as the effect of washing car, the efficiency of washing car, the cost of washing car, the protect of environment, and so on.In this side, according to the analysis of the function and the operating process of car washer, the overall plan of design is determined(The detail design of the drivingand controlling system of car washer are designed, according to the characteristics of the automatic car, it adopts some processes, such asthe vaginal spray, spray cleaning agent, brushing, air drying and so on. In the control system,it adopts the technologyof sensor and PLC to design the composition of PLC hardware and program the controlling software(The controller is Mitsubishi FX2N series PLC and the program is ladder program, it meets the requirements of the operating and controlling and also the demands of the efficiency, the cost and protect of the environment.Key words: automatic car, PLC, controlling system, ladder program, hardware and software programII目录摘要...................................................................... ...................... 错误~未定义书签。
毕业设计(论文)--自助洗车机设计
摘要随着我国汽车保有量的迅速提高,汽车清洗行业迎来了一个重要的发展机遇,自助洗车机作为洗车工作必不可少的设备,其清洗效果,清洗速度,清洗成本以及对节水和环境保护的要求,成为其开发和生产必须要考虑的内容。
本文主要通过对自助洗车机功能要求和运行分析,确定了自助洗车机的总体设计方案。
并主要进行了自助洗车机的驱动和控制系统的设计,针对自助洗车机的特点,采用自助投币,喷水,洗刷,喷洒清洗剂和风干等过程,应用了可编程控制技术对自助洗车机PLC控制系统进行了硬件设计和软件编程。
PLC采用梯形图编程语言,并应用了组态王软件,对其运行过程实行监控,最终达到了实现自助洗车机的传动和控制要求。
关键词可编程控制器控制自助洗车机顺序动作PLC德州职业技术学院毕业设计论文目录摘要 (1)第一章绪论 (1)1.1 自动洗车机课程背景 (1)1.2PLC简介 (2)1.3 自动洗车机的优点 (5)1.4自动洗车机设计的目的 (6)第二章自动洗车投币系统分析 (8)2.1投币系统外部接线图 (8)2.2投币功能电路图的工作过程 (8)第三章自动洗车控制系统分析 (9)3.1控制系统设计内容要求 (9)3.2PLC的选型 (10)3.3输入输出分配表 (10)3.4自动洗车机硬件设计 (10)3.5自动洗车机软件设计 (11)第四章调试结果 (29)第五章结论 (30)致谢 (31)参考文献 (32)基于PLC 自动洗车机1第一章 绪论1.1 自动洗车机课程背景当今社会汽车行业发展迅猛,我国汽车业高速成长,汽车需求量年均增加,远远超越世界年均增加速率。
我国已成为世界第二大汽车消费国,我国私人汽车持有量的不断增加,汽配市场空前成长达到了3980亿元的市场规模。
汽车产业链中的汽车清洗占了汽车项目的大头,汽车维修保养行业竞争更是愈演愈烈,洗车机由此得以广泛应用。
自动洗车机通过对毛刷,水泵,机体行走机构和风机等部件的驱动控制,全自动完成对车辆的刷洗和风干。
毕业设计:自动洗车机控制系统设计
南京机电职业技术学院机械工程系毕业设计(论文)开题报告毕业设计(论文)题目自动洗车机控制系统设计学生姓名周小中专业名称机电一体化班级08机电2班学号082447 指导教师王强职称教师填写日期2011年2月开题报告①内容摘要本文介绍自动洗车控制系统的设计思想、设计步骤以及可以实现的功能。
采用S7-200系列PLC实现自动洗车控制,并利用STEP7-Micro/MIN32软件完成梯形图、指令表的程序设计。
本文自动洗车控制系统采用了四个输入信号,分别为启动开关I0.0、右极限开关I0.1、左极限开关I0.2、原点复位按钮I0.3;九个输出信号:洗车机右移Q0.0、、风扇动作Q0.1、刷子动作Q0.2、洗车机左移Q0.3、喷洒清洁剂Q0.4、喷水Q0.5、洗车机Q0.6、启动灯Q0.7、复位灯Q1.0。
其中洗车机右移和洗车机左移由电动机1的正反转控制,刷子动作由电动机2控制,喷水及喷洒清洁剂由电磁阀控制。
经启动后可自动完成清洗后自行停止,也可手动停止,但启动前必需复位。
根据输入输出数量采用CPU224即可满足需求。
自动洗车经启动后能顺序完成要求动作,结束后自行停止,若断电停止在得电后不会自行启动,实现了理论上的自动化。
关键词:自动洗车;PLC控制;顺序动作This paper introduced the automatic wash the car control system design and implement measures designed to function. the use of the plc -200 s7 to wash the car, automatically control and use STEP7-Micro/MIN32 software diagram and instructions. the programming.The automatic wash the car control system adopted four input signal, respectively:the switch I0.0, limit switches right I0. 1,, limit switches left I0.2,resets the button I0.3. nine output signal : wash the car up the move right Q0.0 andAction fan Q0.1, brushes action Q0.2 and wash the car up the move left Q0.3, spray cleaner Q0. 4 and spray water Q0.5, and the machine Q0.6 and the switch lamp Q0.7 and the reset lamp Q1.0. Of the washing machine and the right or left to move the car washed up by motor 1 control, brushes action under control by moter 2 and spray water and spray cleaner is control by valve. it is done automatically starts to clean after it stopped, can also manually, but it is necessary to start before the recovery.According to the number of input and output CPU224 can be used to meet demand. the automatic wash the car has started to completion order to movement after the move, to stop, if the electricity to power to stop in after its implementation will not start, the theory of automation.Keywords: automatic wash the car ; plc control; order to movement ②绪论一、设计意义洗车机的发明创造节省了人不少的劳动力,一个新产品的问世更是人类智慧的结晶。
毕业设计任务书
毕业答辩
三、其他
确定机械操作臂传动方案并设计机械操作臂零部件结构
2010-8-11~2010-8-20
利用UG软件对机械操作臂进行三维建模、动作模拟仿真
2010-8-21~2010-9-1
完善机械操作臂零件图、总状图等工程图纸
2010-9-2~2010-9-14
撰写论文说明书
2010-9-15~2010-9-24
论文评审、修改
具体内容:
1.机械操作臂相关零部ቤተ መጻሕፍቲ ባይዱ的零件图和装配图;
2.机械操作臂3D模型及动画仿真;
3.设计说明书。
二、毕业设计进度计划
起讫日期
工作内容
备注
2010-7-1~2010-7-6
调研、收集资料、阅读文献、确定研究方向
2010-7-7~2010-7-20
拟定课题总体设计方案
2010-7-21~2010-8-10
苏州市职业大学
毕业设计任务书
课题小型化移动式洗车机械操作臂设计
2010年7月1日至2010年9月26日共12周
系机电工程系
专业班级07机电一体化3班
姓名李小龙
系主任陶亦亦
教研室主任陆春元
指导教师王锋
2010年7月6日
一、课题内容及要求
课题要求在了解常用洗车设备的基础上进行洗车机械操作臂的运动方案设计和机械结构设计;完成机械操作臂的三维总装图和二维平面图;使用UG对机械操作臂进行三维建模、装配,并进行了动作模拟仿真;估算机械操作臂驱动功率,完成部分关节的驱动选型,并对关键部位强度进行校核,以保证操作臂工作的可靠性。
移动洗车机设计毕业设计论文

1前言1.1 移动洗车机的简单介绍一般来说洗车机是一种很常见的对车辆清洗的工具或者说装备。
以前用户一般都是将车辆开到固定的地点——也就是洗车机所在的地点,对车辆进行清洗。
这种固定的洗车方式对商家来说固然是最方便最快捷的经营方式,但是这种洗车方式却浪费了消费者、客户的时间,客户将开车到指定的地点,给客户带来了不便。
本着以消费者为上帝和最大限度的便利消费者的态度,同样也是商家提高自己竞争力的手段,移动洗车机应运而生。
移动洗车机顾名思义是一种可以动的洗车机,改变以往洗车固定不动的模式,将洗车机设计成一种类似快餐似的外卖服务,可以进行预定式的洗车。
目前这种移动洗车机一般结构较简单类似家用洗车机,尺寸比一般家用洗车机稍大。
同样也节省铺面,一般啊用这种移动洗车机洗车的公司并不设铺面而是类似订餐式上门服务。
这种洗车机洗车时间很短,一般为10分钟左右,使用方便快捷。
同样它存在一些缺点,比如:清洗洁净度不够、洗车基本上为人为操作耗费人力等等。
1.2 洗车机的发展现状现在人们经常见到的清洗设备从使用类型上划分无外乎家用、商用两种类型。
一般来说,家用型清洗设备都是小型的、方便携带的,移动便利并且可装进汽车后备箱。
这样的清洗设别通常是分为三部分。
第一部分是储水设别(也可是直接连接设备,但直接连接设备需要周围有可直接利用、可连接的水源。
而户外一般很难找到带有压力的水源,说以这种情况暂且不论),一般出水设备要求不高,只要符合储水要求,一般形状很随意;第二部分为水处理部分,根据使用要求不同和设计要求,最简单时只设置压力出水装置,只要能够达到出水的压力要求即可。
但现在很多洗车机都要求节能或超洁净处理,所以有的洗车机常常设有高温处理、雾化处理来对储存水进行加工以便更好的清洗车辆或者说节能环保;第三部分是最后的出水设备,最早的时候只安置一条输水管,一边连着洗车机出水装置另一边连着水枪,通过水枪把高压水雾化,人握住水枪对车辆进行喷射清洗。
自动洗车毕业设计机,自动洗车房解析
摘要当今社会是一个科技高速发展的社会,是一个自动化盛行的社会。
有人开玩笑地说,自动化技术是聪明人为懒人发明的技术。
这句话的前半句是有些道理,后半部分就不太确切了。
因为自动化技术的发明和发展并不是用来为懒人服务的。
本课题设计了一个全自动洗车机的控制系统。
传统的方式是采用人工对车辆进行清洗,这种方法劳动强度高、劳动效率低、对水和人力资源的浪费情况比较严重,特别在遇到阴雨天气,车身沾满泥浆的时候,人工清洗不能满足对车辆清洗速度的要求。
2 0世纪8 0年代中期,在公交系统的一些大型停车场开始采用机械化的洗车方式,但是由于技术的限制,对汽车的清洗只能做到半人工化的工作,即机器的所有动作还是要由人工操作完成,对于提高效率的意义全自动洗车机是人机为一体的自动化洗车设备。
大大提高了洗车质量和洗车效率。
采用PLC进行控制,通过合理的选择和设计,提高了洗车机的控制水平。
利用PLC作为控制系统,已成为当今制造业领域进行设备革命、提高生产力和市场竞争力的重要手段。
特别是生产的自动化改造,PLC控制已成为一种技术潮流之一。
关键词:洗车机;PLC;逻辑控制;全自动ABSTRACTScience and technology in today's society is a rapidly developing society, is the prevalence of an automated society. It was a joke to say that automation technology is smart technology invented by lazy people. This sentence is some truth in the first phrase, the latter half of the less precise. Because of automation technology is not the invention and development of services for the lazy.This issue we designed a fully automatic washing machine control system. The traditional approach is the use of artificial cleaning of vehicles, the method of high labor intensity, labor efficiency is low, water and waste of human resources is very serious, especially in case of rainy weather, the body covered with mud, the manual cleaning can not be the speed of vehicles to meet the cleaning requirements. 2 0 century and the mid-eighty, in the public transport system a number of large-scale parking lots began to use mechanized methods of washing, but due to technical limitations, the cleaning of the car can do the work of semi-artificial, that is, all the machine movements or to be completed by manual operation, for improving the efficiency of the significance of fully automatic washing machine is one machine for the automated car wash equipment. Greatly enhance the quality of the car wash and car wash efficiency.The use of PLC control, through the rational selection and design, raised the level of control washing machine. As the use of PLC control systems, has become the area of equipment manufacturing industry revolution, increasing productivity and market competitiveness of an important means. In particular the transformation of production automation, PLC control technology has become a trend one.Keywords: car washing machine; PLC; logic control; automatic目录摘要 (I)ABSTRACT (II)目录 (III)绪论 (1)第一章基于可编程控制器的电梯控制系统 (2)1.1 PLC可编程控制器 (2)1.1.1 PLC简介 (2)1.1.2 PLC提供的编程语言 (2)1.1.3当代PLC 的发展 (3)1. 2 基于PLC控制的全自动洗车机的特点 (4)第2章洗车机控制方案确定 (6)2.1 洗车机的分类 (6)2.2 自动洗车机种类的选择 (7)2.3 自动洗车机的工艺控制要求 (7)2.4 洗车机控制系统原理框图 (9)第3章硬件系统的设计 (10)3.1 洗车机的外型构造 (10)3.2 洗车机控制台设计 (10)3.3 主电路图的设计 (18)3.4 控制电路的设计 (20)3.4.1 PLC的选择 (20)3.4.2 PLC接口与硬件的接口 (20)3.4.3 PLC接线图 (21)第4章系统的软件设计 (23)4.1 车辆检测控制 (23)4.1.1 光电传感器的分类 (23)4.1.2光电式传感器的应用 (23)4.1.3 光电传感器的发展 (23)4.2 门架的移动和滚筒的旋转控制 (24)4.2.1 水平滚筒的控制 (24)4.2.2 滚筒旋转 (24)4.2.3 门架的前进与后退 (24)4.3 手动控制 (25)4.4 故障报警 (25)4.5 程序流程图 (25)4.6 程序的编译 (25)结论 (28)参考文献 (30)致谢 (31)绪论全自动洗车机的推广和应用,对洗车行业提高效率,节约水资源,符合环保要求,降低经营成本,获取更大利润提供了契机。
毕业设计自动洗车机操纵三菱PLCf
福州职业技术学院毕业设计设计题目自动洗车机操纵系别技术工程系年级专业09级应用电子技术学号 202002021232 姓名高晓欢指导教师王晶晶职称助教年月日目录内容摘要 (2)关键词 (2)引言 (3)一、PLC简介 (4)二、自动洗车操纵系统设计思想 (6)(一)自动洗车操纵系统分析 (6)(二)自动洗车操纵系统流程图 (7)三、PLC在操纵系统中的运用 (12)(一)自动洗车操纵系统组成 (12)(二)自动洗车操纵系统I/O分派表 (13)(三)自动洗车PLC实物图 (14)(四)自动洗车操纵外部接线图 (15)四、自动洗车操纵系统梯形图和指令表 (16)(一)自动洗车操纵系统梯形图 (16)(二)自动洗车操纵系统指令表 (22)五、PLC运行进程及操纵要求 (25)六、结论 (26)七、参考文献 (26)1自动洗车机操纵设计【内容摘要】本文介绍自动洗车操纵系统的设计思想、设计步骤和能够实现的功能。
采纳FX2N系列PLC实现自动洗车操纵,并完成梯形图、指令表的程序设计。
本文自动洗车操纵系统采纳了四个输入信号,别离为启动开关X2、右极限开关X1、左极限开关X0、原点复位按钮X3;八个输出信号,洗车机右移Y1、风扇动作Y5、刷子动作Y4、洗车机左移Y0、喷洒清洁剂Y3、喷水Y2、启动灯Y6、复位灯Y7.经启动后可自动完成清洗后自行停止,也可手动停止,但启动前必需复位。
自动洗车经启动后能顺序完成要求动作,终止后自行停止,假设断电停止在得电后可不能自行启动,实现了理论上的自动化。
【关键词】PLC自动洗车机本钱低靠得住性高最近几年来PLC发生了重大的转变,由于PLC要紧用于开关操纵和顺序操纵,而且具有靠得住性高,体积小,价钱低,易于检修与保护,编程方便等优势,将普遍应用于工业领域。
此刻的PLC不在是以前简单的PLC,她几乎能够完成所有的自动化操纵任务。
它吸取了微电子技术和运算机技术的最新功效,进展十分迅速,结合运算机通信,互换数据,增加现场总线,通信,特殊模块,使得PLC再次取得壮大的生命力和更宽的应用领域。
毕业设计(论文)-全自动洗车机控制系统设计[管理资料]
![毕业设计(论文)-全自动洗车机控制系统设计[管理资料]](https://img.taocdn.com/s3/m/61ae37f20740be1e640e9a9a.png)
本科毕业论文(设计)题目:全自动洗车机控制系统设计学院:自动化工程学院专业:电气工程及其自动化姓名:指导教师:201年6 月3 日摘要我们所处的的社会一直处在科技高速发展的状态。
从蒸汽时代开始,短短的一二百年的时间里,科技的进步在越来越多的领域解放着我们的双手。
可以说,当今社会是一个用科技支撑起来的社会。
自从汽车开始普及起来之后,洗车的行业也就应运而生。
长期以来,洗车的方式一直是以人工为主。
20世纪八十年代中期,在公交系统的一些大型停车场开始采用机械化的方式进行洗车,但由于技术的限制的原因,对汽车的清洗只能做到半自动化,不能做到全自动化。
即机器所有的动作还是需要人工操作才能完成。
通过采用PLC进行控制,结合合理的设计生产制造的全自动洗车机,能够实现真正意义上的全自动化,大大提高了洗车的质量和洗车的效率。
采用PLC作为控制系统,已经成为现代制造业领域提高竞争力和生产力的重要手段,PLC控制俨然已经成为一种技术潮流。
关键词洗车机PLC 全自动逻辑控制AbstractOur society has been in a state of rapid development of science and technology. Starting from the steam age, a short one thousand two hundred years, the progress of science and technology in the field of more and more free with our hands. In today's society is, as it were, with a support of social science and technology.Since the car began to spread, car wash industry also arises at the historic moment. For a long time, has been mainly on artificial washing way. Mid - eighty - s of the 20th century, in some large parking lot of the bus system with the method of mechanization for washing the car, but because of the limits of technology, in the car can only do half automation, cleaning cannot be fully automated. The machine all the actions still need manual operation to complete.By adopting PLC to control, combined with reasonable design production and manufacturing of automatic washing machine, can realize full automation in the true sense, greatly improve the efficiency of the quality of the car wash and wash the car. Adopting PLC as the control system, has become the important means to improve competitiveness and productivity in the field of modern manufacturing, PLC control has already become a kind of technology trends.Keywords washer PLC automatic control logic目录摘要 (II)目录 (III)第1章基于可编程控制器的电梯控制系统 (1)PLC可编程控制器 (1)PLC发展及发展趋势 (1)PLC提供的编程语言 (2)PLC控制的全自动洗车机的特点 (2)第2章洗车机控制方案确定 (5)我国洗车机的发展及现状 (5)洗车机的分类 (5)全自动洗车机设计的确定 (7)全自动洗车机的工艺控制要求 (8)洗车机的基本组成 (8)自动洗车过程 (8)洗车机的其他命令及自动控制 (9)全自动洗车机控制系统原理框图 (10)洗车机的外型构造 (10)第3章系统中应用的传感器技术 (14)关于传感器 (14)传感器的发展 (14)传感器的分类 (15)传感器在本设计中的一些应用 (15)第4章全自动洗车机的控制及运动 (17)全自动洗车机运动控制简介 (17)滚筒的控制 (17)滚筒旋转与门架的前进后退 (17)全自动洗车机中的手动控制 (18)全自动洗车机故障时的操作及控制 (18)控制程序流程图 (18)第5章控制系统编程 (20)关于梯形图编程 (20)本设计中的梯形图设计 (20)PLC接口对应表 (21)结论 (24)参考文献 (26)附录 PLC梯形图 (27)第1章基于可编程控制器的电梯控制系统PLC可编程控制器PLC是指可编程控制器(programmable logic controller )是一种以计算机(微处理器)为核心的通用工业控制装置,目前已被广泛的应用于工业生产的各个领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录目录 (1)1 绪论 (2)2 操作臂机构及驱动方式 (6)2.1动作方案 (6)2.1.1机器人操作臂介绍及常用形式 (6)2.1.2机器人操作臂方案设计 (6)2.2机器人操作臂驱动方式 (8)2.2.1机械臂常用驱动比较 (8)2.2.2电机驱动类型的选择 (9)2.3传动方式 (10)2.4操作臂结构 (11)2.4.1腕部结构 (11)2.4.2臂部结构 (12)3 零部件材料选择与计算 (16)3.1零件设计的一般要求 (16)3.2零件材料的选择 (16)3.3零部件计算 (17)3.3.1腕关节计算 (17)3.3.2俯仰关节计算 (18)3.3.3伸缩臂计算 (21)3.3.4竖直升降传动计算 (24)4 附件及控制微略 (25)4.1附件 (25)4.1.1洗车刷 (25)4.1.2供水系统 (26)4.2控制微略 (26)结论 (25)致谢 (25)参考文献 (25)1 绪论随着经济的快速发展,家用轿车已经越来越多地为家庭所拥有,据统计,2007年底,我国私人汽车拥有量已超过1500万辆,与此同时,与汽车相关的需求也在激增,比如洗车设备。
轿车每次用都会在表面积一层灰尘,不仅影响美观,还会对车漆造成伤害,因此对轿车表面的清洁工作很重要。
通常,较少进行日常简单清洁的轿车每周要洗一到两次,每次洗车的费用在15元左右(不含上光打蜡)。
轿车日常的简单清洁大多由车主人工完成,费时费力,因此有必要设计一种能够代替人进行轿车的日常清洁工作的服务型机器人操作臂。
现在通常使用的洗车设备和方法主要包括以下几种:1.高压水枪洗车:高压水枪洗车是先用高压水枪喷洒水雾润湿车身,再用高压射流清洗车身然后用清洗液清洗,最后用高压射流清洗干净,用麂皮将水吸干。
高压水枪清洗速度快、效果好;但高压水枪压力大,容易对车漆造成损害:高压水柱的喷淋会改变空调冷凝器散热的方向,导致空调制冷失灵;会直接导致车灯胶条密封不良,影响车灯的正常工作,产生危险;会使密封不是很严的汽车侧门玻璃进水,锈蚀金属件,造成电线短路;劣质洗涤灵会降低车漆的亮度;洗后用毛巾多次擦拭会使车身增加划痕。
2.蒸汽洗车:蒸汽洗车是将水加热成蒸汽后,用蒸汽来消洗汽车。
其具有节水、节能的特点。
但由于设备质量问题,存在安全性不高,极易产生污水造成污染,洗车效果和效率差的缺点。
3.无水洗车:无水洗车是先用掸子掸去车身表面浮土,再用无水洗车液进行汽车清洗的一种新型环保洗车方式。
它具有节约水资源,绿色环保等优点,受到政府的扶持,但是,对于较脏车辆以及汽车底盘等部位,无水洗车不能满足要求,因此它并不能完全替代有水洗车。
4.无刷毛自动洗车机:采用高速水刀喷出的高压力水雾从上往下清洗汽车,灰尘冲掉后,自动泡沫喷头喷淋,然后用高压清水进行清洗。
它有清洗速度快,效果好,不损伤车漆的优点,但存在水耗大,设备投资和运行费用高昂的缺点。
5.全自动电脑洗车机:电脑洗车机是利用电脑控制毛刷和高压水枪来清洗汽车的一种设备。
由复杂的电路、气路、水路和机械部分构成。
某自动洗车机结构如下,包括高压喷头、机械清洗机构、吹干机构,其中,清洗机构包括一个顶刷,两个大侧刷,两个小侧刷,如图1-1所示。
1.轨道;2.机架;3、4.大侧刷;5.顶刷;6.小侧刷;7.吹干系统图1-1大型电脑洗车结构简图洗车时,首先汽车停靠到位,由高压喷头喷水冲掉汽车表面泥沙,再由组成清洗机构的五个刷子围绕汽车运动进行清洗、打蜡,然后由吹干机构将汽车表面吹干。
这样的大型机构洗车时确实有很好的效果,但是用于个人洗车设备却很不适宜。
首先在水、电等资源方面会有很大的消耗,另外,其体积(通常3m*3m*3m,轨道10米,隧道式更大),价格(几万到十几万间)也让个人很难接受。
以上几种一般用于洗车行,在个人洗车方面,除了传统的水桶加抹布外,现在所研究的个人洗车设备也多为手动。
其中,前者耗费大量体力、时间,而且效率低,也不容易洗得干净,还容易刮损伤车漆。
后者采用某些化学洗剂,在效果方面有很大改善,但是也要花费车主的大量时间和体力。
适合个人使用的小型自动洗车设备的研究方面较少,具有代表性的为日本人平松正彦的一项专利,其结构(主视图和俯视图)如图1-2和图1-3所示。
图1-2平松正彦专利(主视图)图1-3平松正彦专利(俯视图)该洗车装置主要包括洗车刷1、底盘3、支撑架6及底盘上的设备(水箱、发电机、控制器等)4。
首先,洗车刷可以拆卸,安装在刷轴上,由电机7带动其转动,实现洗车动作。
底盘上安装有两个驱动轮及相应的两个驱动电机和四个万向轮。
支撑架上安装喷水管2、导轮5和照明装置、力传感器。
控制部分、水箱、泵、发电机等安装在底盘上洗车刷后面。
进行汽车清洗时,喷水管向车身喷水、洗车刷与车表面接触并转动洗去车表面灰尘等,同时,力传感器检测洗车刷和汽车间的压力,由力传感器检测出的压力值来控制转向单元,当该检测值大于预先设定的允许范围时,使洗车机向远离车身外周面的离开方向行驶,而当该检测值小于预先设定的允许范围时,使洗车机向接近该车身外周面的接近方向行驶。
洗车设备围绕汽车行驶一周后完成车侧表面的清洗。
但该设备的局限性在于它只有清洗侧面的立刷,不能对车顶部进行清洗,并不能完全代替人对汽车进行较全面的清洗。
因此有必要设计一种可以代替人进行日常汽车清洗工作的机械操作臂。
2 操作臂机构及驱动方式2.1 动作方案2.1.1 机器人操作臂介绍及常用形式机器人操作臂的设计涉及了力学、控制、计算机科学和电子工程等多个学科,其结构一般是由一系列连杆由旋转关节或移动关节相连接的具有一定自由度数的开式运动链,一端固定在支座上,另一端自由,安装手爪、工具等以实现各种操作。
操作臂的自由度数按照不同的适用场合不同,一般工业机器人操作臂的自由度数在6个以下,高自由度数的机器人具有冗余度,一般用于假肢或特殊场合,其价格也相应更高。
按照对手臂机构的坐标描述方式,机器人操作臂通常分为直角坐标型、圆柱坐标型、极坐标型和多关节型,如图2-1所示。
图2-1 操作臂分类2.1.2 机器人操作臂方案设计在本设计中,操作臂搭载在一个可移动平台上,和可移动平台组成移动机械操作臂系统,这样的结构使得操作臂拥有几乎无限大的工作空间和很高的冗余度,同时拥有移动和操作功能,因此,对于操作臂结构而言,采用上述任何一种坐标方式,只要设置得当,都可以使操作臂末梢达到汽车表面需要清洗的每个地方。
根据洗车的需要分析,初步拟定了如下几种动作方案:首先考虑洗车动作,洗车刷与汽车表面产生相对运动擦除灰尘,可以用1、模仿人手擦车动作,用摆动关节实现;2、仿照大型电脑洗车,用圆柱形洗车刷的旋转运动实现相对运动。
使用摆动式洗车结构,因为汽车表面不在同一个平面内,比如顶面、车前挡风玻璃面、侧面,要在这几个不同的面内实现摆动式擦车,其机构相对要复杂得多。
因此采用旋转刷洗车的结构。
方案1采用双臂结构,两个洗车刷装在两个腕关节处,腕关节旋转自由度实现洗车运动。
双臂中一臂固定在移动小车上,侧刷竖直,高度比汽车车身稍高,用于完成汽车侧面清洗,另一臂水平,有竖直方向上的移动自由度,完成车顶的清洗,如图2-2所示。
图2-2 机器人操作臂方案1简图该方案相当于保留大型龙门式洗车的一个侧刷和半个顶刷,将汽车的待清洗表面当作一个较规则的长方体表面,虽然体积有了一定减小,但整体尺寸依然很大,而且其洗车特点接近大型洗车机器,难以照顾到汽车的弧形不规则表面等细微之处。
方案2有一个腕关节旋转自由度为刷子的刷洗动作,一个竖直方向上的移动自由度和臂上一个关节的旋转自由度使刷子能够到达汽车表面各处,如图2-3所示。
图2-3 机器人操作臂方案2简图这个方案与前一个相比体积有所减小,但机构采用的洗车刷要接近一米长,仍然很大,同样难以达到汽车表面的弧形部分,即使采用较软的洗车刷,利用刷变形来勉强与汽车表面曲线贴合,也会产生刷车的摩擦力不均匀的问题。
方案3是在方案2的基础上加一个水平方向的移动自由度,这样可以选择较小的洗车刷,用臂的伸缩刷车的不同部位。
虽然其结构与前两个相比更显得复杂,重量也有所增加,但换来的是更多的自由度,操作臂的灵活性得到极大的提高,可以使执行末端更容易地适应汽车的曲面外形如图2-4所示。
图2-4 机器人操作臂方案3简图因此,最终本设计选择方案3,刷洗过程为:首先由俯仰关节将刷面调整到水平方向,并可以作微小调整,使刷面与汽车的弧形顶面更好地贴合,竖直方向的移动副将刷子升到车顶高度,移动平台绕汽车车身行走,同时伸缩关节调整刷的水平位置,完成车顶的刷洗,过程中可以选择喷水或不喷水;刷洗车侧面时,将刷面调整为竖直方向,并使刷子与车侧面贴合,同样绕车行驶,并配合升降机构完成侧面刷洗。
2.2 机器人操作臂驱动方式驱动机构作为机器工作的动力来源,通常是将其它种能源——比如电能、化学能等——转化成机械能,是任何一种机器都必不可少的,常见的形式包括水轮机、液压马达、电动机、内燃机等。
2.2.1 机械臂常用驱动比较机械臂常用的驱动方式有液压驱动、气压驱动、电机驱动等不同方式,他们有各自的特点,但在机器人中都有很广泛的应用,前两种主要用于工业机器人,有些机器人甚至同时采用多种驱动方式。
他们的特点如下:液压驱动特点:1)驱动力及驱动力矩大,在产生相同驱动力的条件下,液压驱动体积小、重量轻、惯性小;2)速度反应性好,调速范围大,而且可以无级调速;3)传动平稳,能吸收冲击,可平稳的实现较频繁的换向;4)定位精度较高;5)油液泄漏、混入气体、温度变化等都会对系统传动性能、定位精度产生影响。
液压驱动常用于低速重载的情况。
气压驱动特点:1)压缩空气可直接从大气中吸取,动力源获取方便、廉价;2)动作速度更快,可实现无级调速;3)与液压传动相比,管路压力损失小,适于长距离传输;4)空气压缩性较大,因此气压系统运动平稳性及定位精度都较差;5)结构体积大,噪声大气压驱动系统常用于高速、低负载和工作条件较恶劣的场合。
电机驱动:1)避免将电能转换成压力的中间环节,效率更高;2)电机系统的体积最小;3)电机系统的可靠性高、位置精度控制十分精确;4)与气压液压系统相比,电机系统维护更方便。
通过上述比较,可以看出,液压及气压系统组成的机构的繁琐、维护不便,对于本设计中的移动操作臂来说是一个无法实现的问题,另外从位置控制精度角度考虑,电机也是更好的选择,因此最终选用电机作为驱动系统。
2.2.2 电机驱动类型的选择电机的类型按使用电源分有交流电机、直流电机。
使用交流电机必然会有电源线,对于移动机器操作臂来说,带着长长的电源线移动不仅不方便、移动距离受限制,在遇到物体时还难免会有电源线缠绕、交叉等问题,因此难以实现,只能采用直流电机系统,用同样搭载于移动平台上的电池作为电源。