作业2 高空间分辨率遥感影像分割方法实验
作业2高空间分辨率遥感影像分割方法实验
作业2高空间分辨率遥感影像分割方法实验高空间分辨率遥感影像分割是指利用高分辨率遥感影像进行地物分割的过程。
地物分割是图像处理和计算机视觉领域的一个重要课题,对于遥感影像分析、地物识别和监测具有重要意义。
本文将介绍一种基于卷积神经网络(Convolutional Neural Network,CNN)的高空间分辨率遥感影像分割方法实验。
首先,需要准备一组高空间分辨率的遥感影像数据集。
可以选择一些包含不同地物类型的遥感影像,如建筑物、道路、植被等。
这些影像应该具有较高的空间分辨率,以保证细节信息能够被充分捕捉到。
其次,根据实验需求选择并搭建适当的卷积神经网络模型。
常用的卷积神经网络模型有U-Net、DeepLab、FCN等。
这些模型通过多次卷积和池化操作,可以有效地提取遥感影像中的地物特征。
然后,需要对遥感影像进行预处理。
预处理包括影像的裁剪、归一化、滤波等操作。
裁剪操作可以将影像切分成较小的块,以减小计算量。
归一化操作可以将影像的灰度值映射到0-1范围内,以便模型训练。
滤波操作可以去除噪声,提高图像的质量。
接下来,利用已搭建好的卷积神经网络模型对预处理后的遥感影像进行训练。
训练过程可以采用反向传播算法,通过最小化损失函数来优化模型参数。
在训练过程中,可以使用一部分遥感影像作为训练样本,另一部分遥感影像作为验证样本,以监测模型的性能和泛化能力。
总结起来,高空间分辨率遥感影像分割方法实验包括数据集的准备、神经网络模型的选择与搭建、预处理操作、模型训练、测试和评估等步骤。
这些步骤在实际应用中非常重要,对于地物分割的准确性和效率具有关键作用。
通过实验可以验证该方法在高空间分辨率遥感影像分割中的有效性和可行性。
遥感实验报告裁剪拼接(3篇)
第1篇一、实验目的本次实验旨在学习遥感影像处理中的裁剪与拼接技术,通过对遥感影像进行裁剪和拼接,提高遥感数据的可用性和分析效率。
二、实验背景遥感技术是获取地球表面信息的重要手段,广泛应用于资源调查、环境监测、灾害评估等领域。
遥感影像经过处理和提取后,才能为实际应用提供有价值的信息。
裁剪与拼接是遥感影像处理中的基本操作,通过对影像进行裁剪和拼接,可以去除无关信息,提高影像的可用性。
三、实验材料1. 遥感影像数据:包括多景遥感影像,如Landsat、Sentinel-2等;2. 裁剪与拼接软件:如ENVI、ArcGIS等;3. 实验环境:计算机、遥感数据处理软件等。
四、实验步骤1. 数据准备(1)选择遥感影像数据,确保影像质量良好、覆盖范围完整;(2)对遥感影像进行预处理,包括辐射校正、大气校正等,提高影像质量。
2. 裁剪操作(1)确定裁剪范围:根据实验需求,选择合适的裁剪范围,如行政区域、研究区域等;(2)使用裁剪工具对遥感影像进行裁剪,生成新的影像。
3. 拼接操作(1)选择拼接方式:根据实际情况,选择合适的拼接方式,如同名像元拼接、重叠区域拼接等;(2)使用拼接工具对遥感影像进行拼接,生成新的影像。
4. 质量评估(1)检查拼接后的影像是否完整,是否存在缝隙、错位等问题;(2)分析拼接区域的地物特征,确保拼接效果良好。
五、实验结果与分析1. 裁剪结果经过裁剪操作,生成了新的遥感影像,去除了无关信息,提高了影像的可用性。
2. 拼接结果经过拼接操作,生成了新的遥感影像,拼接区域地物特征良好,拼接效果满意。
3. 质量评估(1)拼接后的影像完整,无缝隙、错位等问题;(2)拼接区域地物特征良好,拼接效果满意。
六、实验结论通过本次实验,掌握了遥感影像的裁剪与拼接技术,提高了遥感数据的可用性和分析效率。
在实际应用中,可根据具体需求选择合适的裁剪与拼接方法,为遥感数据处理提供有力支持。
七、实验心得1. 裁剪与拼接是遥感影像处理中的基本操作,对于提高遥感数据的可用性具有重要意义;2. 在实际操作中,应根据具体需求选择合适的裁剪与拼接方法,确保拼接效果良好;3. 学习遥感影像处理技术,有助于提高遥感数据的分析和应用水平。
高分辨率遥感数据分割步骤
高分辨率遥感数据分割步骤1.数据预处理数据预处理是分割过程中的第一步,其目的是为了提高图像的质量和减少干扰因素。
常见的预处理步骤包括辐射校正、几何校正和影像增强。
-辐射校正:通过考虑大气纠正和计算量子效率校正因素,将影像转换为表面反射率,消除大气干扰。
-几何校正:将影像纠正为正常的几何位置,消除由于传感器姿态或地球形状等原因造成的几何失真。
-影像增强:通过应用各种滤波和增强算法,增强图像的对比度和边缘,以提高分割的结果。
2.特征提取特征提取是指从预处理后的影像中提取与目标识别和分类相关的特征。
常用的特征包括光谱特征、纹理特征和形状特征等。
-光谱特征:通过分析不同波段的像元亮度值,提取不同目标之间的光谱差异。
-纹理特征:通过提取像素邻域内的纹理信息,如灰度共生矩阵、小波变换等,描述目标表面的纹理特征。
-形状特征:通过计算目标的形状参数,如周长、面积、紧凑度等,描述目标的形状特点。
3.分割算法选择根据实际需求和数据特点,选择适合的分割算法进行分割。
常用的分割算法包括基于阈值、区域生长、分水岭、支持向量机和深度学习等。
-基于阈值:根据像素的光谱信息设置阈值,将像素分到不同的类别中。
-区域生长:通过选择种子点和生长准则,将相邻像素具有相似特征的区域合并为对象。
-分水岭:将图像看作地形图,根据像素强度的梯度信息进行分割。
-支持向量机:利用已标记样本训练分类器,对未标记像素进行分类。
-深度学习:利用深度神经网络进行自动特征学习和像素分类。
4.对象后处理在分割结果中,可能会存在一些不连续、孤立的像元,需要对其进行后处理,包括去噪、对象合并和边界优化等。
-去噪:通过滤波和形态学操作等操作,消除噪声点和小面积的分割错误。
-对象合并:将面积较小的分割对象与其周围邻接对象进行合并。
-边界优化:基于图论算法,优化分割结果的边界,使其更加平滑和自然。
最后,需要对分割结果进行精度评价和应用验证,判断分割结果的准确性和可行性,并进行相应的优化和改进。
遥感图像处理—图像分割
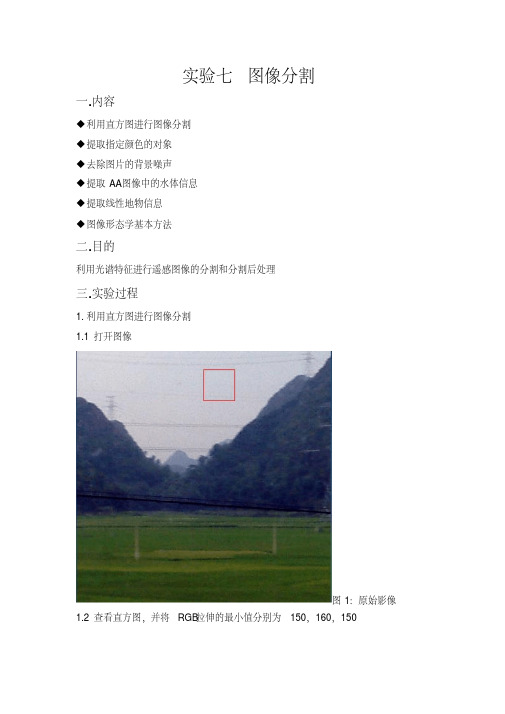
实验七图像分割
一.内容
◆利用直方图进行图像分割
◆提取指定颜色的对象
◆去除图片的背景噪声
◆提取AA图像中的水体信息
◆提取线性地物信息
◆图像形态学基本方法
二.目的
利用光谱特征进行遥感图像的分割和分割后处理
三.实验过程
1.利用直方图进行图像分割
1.1打开图像
图1:原始影像1.2查看直方图,并将RGB拉伸的最小值分别为150,160,150
图2:拉伸后影像
1.3.使用表达式去除天空
表达式:b4*(1-(b1 gt 150)*(b2 gt 160)*(b3 gt 150))
图3:处理对比图
2.彩色图像的分割
2.1提取图像中的兰花
查看直方图,观察各通道上的灰度值差异,确定表达式
导出公式:(b1 gt b2)*(b1 gt b3)
图4:提取及去除兰花示意图
2.2.去除背景噪音,增强图像中的字符信息
表达式:255*(1-((b3 lt 200)and(b2 lt 100) and(b1 lt 100)))。
高分辨率卫星遥感图像分割技术研究
高分辨率卫星遥感图像分割技术研究近年来,随着卫星遥感技术的不断发展,高分辨率卫星遥感图像分割技术也越来越受到人们的关注。
在城市规划、农业生产、环境监测等领域,高分辨率卫星遥感图像分割技术的应用已经成为了不可或缺的手段。
一、高分辨率卫星遥感图像分割技术的基本概念高分辨率卫星遥感图像分割技术是指根据遥感图像中的各种特征对图像进行划分,将其分成不同的区域,每个区域具有明显的空间结构特征。
这种分割技术可以帮助我们更好地理解和利用遥感图像,加深对地表物体的认识以及对空间信息的掌握。
二、高分辨率卫星遥感图像分割技术的优势和挑战高分辨率卫星遥感图像分割技术具有如下优势:1.分割效果更加精细。
高分辨率卫星遥感图像分辨率高,可以获取更多的细节信息,使得对地表物体的分割更加精确。
2.难度更大。
高分辨率卫星遥感图像中物体的种类繁多、相似度高,同时图像也较大,因此对算法的精度和效率提出了更高的要求。
3.更强的泛化能力。
高分辨率卫星遥感图像分割技术具有较强的泛化能力,可以适应各种地区和各种场景的遥感图像分割需求。
三、高分辨率卫星遥感图像分割技术的算法和应用高分辨率卫星遥感图像分割技术的算法主要分为两大类:基于区域的方法和基于边缘的方法。
1.基于区域的方法。
该方法是将遥感图像分为若干个互不相交的区域,并将具有相似特征的像素划分到同一区域中。
这种方法先将整幅图像分成多个区域,再通过合并或分裂这些区域,得到最终的分割图像。
2.基于边缘的方法。
该方法是基于图像中物体边缘和边缘间的关系进行划分,得到不同的物体区域。
该方法常用的算法有阈值、水平集、Canny等。
对于高分辨率卫星遥感图像分割技术的应用,它主要涵盖城市规划、农业生产、环境监测等领域。
例如,在城市规划方面,可以利用高分辨率卫星遥感图像分割技术快速提取城市建筑物、道路和绿地等信息,为城市规划提供重要参考。
在农业生产方面,可以利用高分辨率卫星遥感图像分割技术分析农产品的生长、产量和品质等特征,为农业生产提供决策支持。
遥感影像裁剪实验报告
一、实验目的1. 掌握遥感图像几何校正的基本方法和步骤;2. 掌握图像拼接的原理,以及两幅图像拼接的时候需要的条件,掌握拼接技术;3. 学习通过 ERDAS 进行遥感图像规则分幅裁剪,不规则分幅裁剪和掩膜处理。
二、实验内容1. 规则分幅裁剪:根据行列号、左上角和右下角两点坐标、图像文件、ROI 矢/量文件等获取矩形裁剪范围,进行规则裁剪。
2. 不规则分幅裁剪:通过手动绘制裁剪范围和外部矢量数据裁剪图像两种方法进行不规则裁剪。
3. 掩膜处理:对全州县东山瑶族自治乡七宝坑研究区TM影像进行掩膜处理,提取研究区信息。
三、实验步骤1. 规则分幅裁剪:(1)打开ENVI软件,选择File>Open Image File,导入124-42双牌幅TM影像数据。
(2)选择File>Save File As>ENVI Standard,创建新文件。
(3)选择Import File,导入裁剪范围数据。
(4)在ENVI主菜单栏中选择File>Save As,保存裁剪后的图像。
2. 不规则分幅裁剪:(1)打开ENVI软件,导入124-42双牌幅TM影像数据。
(2)选择File>Save File As>ENVI Standard,创建新文件。
(3)在ENVI界面中,使用鼠标绘制裁剪范围或导入外部矢量数据。
(4)在ENVI主菜单栏中选择File>Save As,保存裁剪后的图像。
3. 掩膜处理:(1)打开ENVI软件,导入124-42双牌幅TM影像数据。
(2)选择File>Save File As>ENVI Standard,创建新文件。
(3)在ENVI界面中,使用掩膜工具对研究区进行掩膜处理。
(4)在ENVI主菜单栏中选择File>Save As,保存掩膜后的图像。
四、实验结果与分析1. 规则分幅裁剪:成功获取124-42双牌幅TM影像数据的矩形裁剪范围,裁剪后的图像符合预期。
实验二、遥感图像增强(彩色合成、假彩色密度分割、波段运算)
实验二、遥感图像增强(彩色合成、假彩色密度分割、波段运算)一、彩色合成将不同波段的影像分别赋予不同的色彩,合成处理的过程。
如分别赋予TM图像2,3,4波段色彩R,G,B;1. 从 Available Bands List 内,选择“RGB Color” 切换按钮。
2. 在序列中点击所需要显示的红、绿和蓝波段名(或在每个R、G 或 B 波段使用切换按钮)。
3. 一旦波段名导入到标签为“R:”、“G:”、“B:” 的文本框中,点击“Load RGB” 来显示彩色合成图像。
二、假彩色密度分割将亮度值等间隔分割分别赋予不同的色彩,合成处理的过程。
如分别赋予TM图像2波段亮度值0-9赋予R,10-19赋予G ,20-29赋予Y等。
1. 在主图像窗口,选择 overlay > Density Slice. 将出现 #n Density Slice对话框(其中“#n” 是用于启动功能的显示号)在“Defined Density Slice Ranges” 下列有八个系统默认范围。
这些范围由滚动窗口计算的最小值和最大值来限定,并显示在“Min” 和“Max” 文本框中。
2. 在适当的文本框中输入所需要的最小和最大值,来改变密度分割的范围。
· 要重新设置数据范围到初始值,点击“Reset”。
3. 通过选择对话框时底部“Windows” 傍所需要的复选框,来选择是否将密度分割颜色应用到图像窗口、滚动窗口或这两个窗口。
4. 点击“Apply” ,将系统默认的范围和颜色应用于图像上。
· 要编辑数据范围:A. 选择一个数据范围,并点击“Edit Range” 来改变范围值或颜色。
B. 当出现 Edit Density Slice Range 对话框时,输入所需要的最小和最大值,并从“Color” 菜单中选择一种颜色。
C. 点击“OK” ,执行改变“Defined Density Slice Ranges” 列表中的范围。
高分辨率遥感数据处理方法实验研究
高分辨率遥感数据处理方法实验研究下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!高分辨率遥感数据处理方法的实验研究一、引言随着遥感技术的快速发展,高分辨率遥感数据已成为获取地球表面信息的重要手段。
高分辨率遥感图像均值漂移算法分割

高分辨率遥感图像均值漂移算法分割摘要:图像分割是土地利用变化检测的关键,遥感图像的分割效果决定了土地利用变化检测的精度。
本文介绍了基于无参数密度估计的均值漂移分割算法,利用高分辨率的遥感影像进行多尺度分割实验,比较分割结果之间的差异。
关键词:图像分割变化检测多尺度均值漂移分割算法引言图像分割是高分辨率遥感图像由“基于像元”向“面向对象”转变的前提和基础,并且图像分割的质量直接影响后续处理的精度。
合适的图像分割尺度为变化检测提供了可选择的空间,而且避免了高分辨率遥感图像基于像元进行变化检测时可能产生的细小的点状变化检测结果。
同时通过分割所产生的图像“对象”中蕴含了大量可用于变化检测的特征信息,如纹理、形状信息等,使得变化检测结果更具稳健性,并且通过分割减少了变化检测所需处理的单元,提高了变化检测速度。
均值漂移算法的遥感图像分割2.1均值漂移分割算法均值漂移算法是从密度函数梯度的非参数估计中推导获得的,而非参数估计则是从样本集出发对密度函数进行估计,它不需要任何先验知识,对任意形状的分布都有效。
其中最常用的是核密度估计,它根据核函数对样本集进行计算得到密度函数。
代表一个维的欧式空间,是该空间中的一个点,用列向量表示。
的模为,表示实数域。
如果一个函数存在一个轮廓函数,即,其中为标准化常数,并且满足:1)是非负的;2)是非增的,即如果,则;3)是分段连续的,并且,那么,函数就被称为核函数[1]。
给定空间中的个采样点,利用核函数及正定的带宽矩阵,则密度函数的核密度估计公式为:其中是采样点的权重,满足,简记为。
核函数决定了采样点与核中心点之间的相似性度量,带宽矩阵决定了核函数的影响范围。
称作马哈拉诺比斯距离。
直观地说,密度估计是每个采样点处的核函数加权求和的结果。
密度函数梯度估计等于密度函数估计的梯度,则密度函数梯度估计公式为:其中,,,核函数称为的阴影函数。
将等式右侧记为,称为均值漂移向量。
为均值漂移迭代公式,即它表示采样点的加权平均值,一般处的密度大于处的密度,因此均值漂移向量总是指向密度大的方向,即密度梯度增加的方向。
基于深度学习的高分辨率遥感图像分割方法
第13卷㊀第10期Vol.13No.10㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2023年10月㊀Oct.2023㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2023)10-0156-03中图分类号:TP301文献标志码:A基于深度学习的高分辨率遥感图像分割方法王㊀伟(河南工业贸易职业学院信息工程学院,郑州450053)摘㊀要:以往高分辨率遥感图像分割方法由于没有对遥感图像中的数据模点进行检测,导致分割精度不高,本文设计了一种基于深度学习的高分辨率遥感图像分割方法㊂首先,通过对遥感图像进行预处理,保留重要的细节信息;其次,对预处理后的遥感图像进行特征提取,并对特征提取后的图像进行滤波处理,增加图像光谱的一致性;最后,利用深度学习方法对遥感图像中的数据模点进行检测,得到遥感图像的最终分割结果㊂通过实验并与以往的高分辨率遥感图像分割方法进行对比证明基于深度学习的高分辨率遥感图像分割方法具有更高的分割精度㊂关键词:深度学习;高分辨率遥感图像;遥感图像;分割方法High-resolutionremote-sensingimagesegmentationmethodbasedondeeplearningWANGWei(CollegeofInformationEngineering,HenanIndustryandTradeVocationalCollege,Zhengzhou450053,China)ʌAbstractɔPrevioushigh-resolutionremotesensingimagesegmentationmethodsdidnotdetectthedatamodulepointsinremotesensingimages.Inthispaper,ahigh-resolutionremote-sensingimagesegmentationmethodbasedondeeplearningisdesigned.Firstofall,thepreprocessingonremotesensingimageretainstheimportantdetails.Thenfeatureextractionisconductedontheremotesensingimageandtheimagefilteringisusedtoincreasetheimagespectralconsistency.Atlastdeeplearningmethodisusedtodetectthedatamodulepointsinremotesensingimagesandgetthefinalsegmentationresults.Theexperimentsshowthattheproposedhigh-resolutionremotesensingimagesegmentationmethodhashighersegmentationaccuracycomparedwithprevioushigh-resolutionremotesensingimagesegmentationmethods.ʌKeywordsɔdeeplearning;high-resolutionremotesensingimage;remotesensingimage;segmentationmethod基金项目:河南省重点研发与推广专项(科技攻关)项目(212102310085,222102210252,232102110281);2023年度河南省高等学校重点科研项目(23A520055);中国高校产学研创新基金新一代信息技术创新项目(2021ITA11007);河南省黄河流域生态环境保护与修复重点实验室开放课题基金(LYBEPR202202)㊂作者简介:王㊀伟(1982-),女,学士,副教授,主要研究方向:人工智能㊁数据挖掘㊂收稿日期:2023-04-120㊀引㊀言遥感技术不断发展,再加上卫星图像分辨率的提高,高分辨率的遥感图像已经成为当代众多建设领域的重要资料来源[1]㊂高分辨率遥感图像的出现,能够快速提取地面物体信息,同时对被提取物体的形状㊁外观特点㊁纹路等特征信息有很好的识别效果,使得遥感图像的应用领域更加广泛,在城市规划㊁灾难警报㊁绘制地图等行业中都有举足轻重的作用,对于各行各业的发展都具有十分重要的意义㊂然而,高分辨率遥感图像的广泛应用,导致遥感图像数据的数量越来越多,从海量的数据中提取出有效的信息成为一件极为困难的事情[2]㊂传统的处理高分辨率遥感图像的方法,在实际应用时不仅需要花费大量的人力和物力,而且还很难达到理想的效果㊂深度学习的快速发展为各行各业提供了新的发展思路,对高分辨率遥感图像目前面临的问题也提出了新的解决方法㊂因此,本文以深度学习为基础,设计了一种新的高分辨率遥感图像分割方法,对于提高遥感图像的分割精度有着一定的指导意义㊂1㊀高分辨率遥感图像分割方法设计1.1㊀遥感图像预处理在遥感图像中,为了提高图像的质量就要对原始的图像进行预处理㊂现在遥感图像数量众多,大多数为小目标,小目标的遥感图像只有几十个像素,而大目标虽然占比较小,但普遍在五万像素左右[3]㊂大目标和小目标遥感图像相差甚多,就会导致相对类型的实物尺寸也相差很多,增加了遥感图像分割的难度,再加上遥感图像的成像高度甚高,图像中大多都为小目标,这就导致图像在处理的过程中很容易出现细节信息丢失的情况,甚至会导致与小目标相关的特征完全缺失㊂此外,在实际应用中,高分辨率的遥感图像中会存在大量具有复杂边界的目标,比如轮船㊁港口㊁战斗机等,这些图像类型的边界非常多变,如果直接对图像进行处理,就很难将其中复杂的形状细节刻画得十分完整,甚至在处理过程中直接导致一部分细节信息丢失,增加目标检测的难度,直接影响遥感图像分割的效果[4]㊂因此,对遥感图像进行预处理是非常重要的,在进行预处理的过程中要保留图像本身的纹理信息,并很好地消除随机噪声,保护好图像的边缘,避免边缘出现模糊等情况,影响遥感图像的后期处理㊂同时,图像边缘像素的变化会呈现出梯状,这时就要将图像的边缘进行异性扩散处理,保证图像边缘处的平滑度,保留重要的细节信息㊂1.2㊀遥感图像特征提取遥感图像的预处理完成后,就要对预处理好的遥感图像进行特征提取,本文利用特征检测的方法提取遥感图像的特征㊂将遥感图像的特征属性分为3个部分,分别是图像纹理㊁图像极值㊁图像灰度低区域,图像纹理是指将遥感图像放在一定的空间内,图像本身会按照规定的形式变化,最终产生出一定图案和模式,作为特征提取时的重要依据;图像极值是指图像的结构和大小,在不同形态下对图像提取造成的影响大小[5];图像灰度低区域是指遥感图像中灰度为零的区域,该区域的阈值比较低,在进行处理的时候变化不会很明显㊂在实际的提取中,还会考虑光谱信息,彩色图像可以看作是光谱图像中一个比较特别的区域,其提取方法和其他图像不同,在提取时要保证对提取目标的边缘检测,可以将纹理梯度图和梯度图像结合在一起,从中截取两者的优势,从而提高对遥感图像特征的提取[6]㊂此外,对于小目标遥感图像来说,由于图像像素过小,在提取时要注意形状因子对其的影响,以免提取失败㊂1.3㊀遥感图像滤波提取遥感图像特征后,为了获得更高的遥感图像分割精度,还要对遥感图像进行滤波处理㊂在获取遥感图像的过程中,会受到多种因素的影响,比如空气湿度㊁光照强度等,这些都会影响遥感图像的细节信息㊂高分辨率的遥感图像相对于普通的遥感图像受到的影响会更大,再加上高分辨率遥感图像有更加丰富的细节信息,因此,这些影响因素也会通过图像纹理㊁图像灰度等方面展现出来,因此特征提取后,要进行滤波处理[7]㊂本文中使用滤波处理方法对遥感图像进行平滑处理,能将遥感图像的均值变宽;通过漂移滤波保证遥感图像边缘处的正常㊂同时,将滤波处理后的图像结构当作图像的特征,也能增加遥感图像各个区域的光谱一致性,减少随机噪声的出现㊂具体的滤波处理过程如式(1)所示:㊀yi,j+1=ðni=1Gxi-yjhæèçöø÷wxi()xiðni=1Gxi-yjhæèçöø÷wxi(),j=1,2, ,n(1)其中,yj表示本次滤波处理中移动点的痕迹;xi表示原始的图像;yi,j+1表示进行滤波处理后的图像;w(xi)表示与xi相关的权重系数;G(x)表示与w(xi)相对应的核函数;h表示空间特征带宽常数㊂通过公式(1),得到平滑后的遥感图像,并知道该图像是否可以进行同质化合并,很好地保持了异质区之间的信息不会丢失㊂1.4㊀基于深度学习的遥感图像分割本文基于深度学习的方法,对滤波处理后高分辨率遥感图像进行分割处理㊂在深度学习的支持下,可以接收任何尺寸的图像输入,并在每一个特征图谱上进行采样,使图像恢复到和输入图像相同的尺寸,同时对每个像素的图像都产生了一个预测,同时也会保留原始输入图像的相关信息,最后再根据采样出来的特征图进行分类㊂在实际应用中,由于高分辨率遥感图像分割方法输出层较多,会将每个输出层固定为一个尺寸,即aˑbˑc,其中,a㊁b表示是遥感图像的空间维度,c表示图像特征或者通道维度㊂因此,在第一个输出层中,图像的像素大小为aˑb,同时带有c个通道,之后的输出层按照这个规律持续后推㊂同时在图像中,较为高级的图层会和图像自身的相对应,这个互相对应的区域被称为接收域㊂由于深度学习的方法具有平移不变的特性,所以高分辨率遥感图像会在局部输入域上运行,并且十分依赖相对应的空间坐标㊂因此,在分割过程中,运用深度学习的方法,检测出遥感图像中每个数据点的模点,其具体检测过程如式(2)所示:g=fʃd()-f∓d()(2)㊀㊀其中,g表示每个数据点的模点;f表示被检测751第10期王伟:基于深度学习的高分辨率遥感图像分割方法的遥感图像;b表示遥感图像的结构元素㊂通过式(2)确定遥感图像的模点,再将相同模点的数据点收敛到同一个区域,得到初步分割的结果,初步分割结果,式(3):D=f∓d()x,y()-minf(x+i,y+i)(3)㊀㊀其中,D表示遥感图像初步分割结果;x表示遥感图像上模点的纹理特征;y表示遥感图像上模点的形态特征;i表示遥感图像初始分割后的变化参数㊂将像素点较小的区域和周边区域进行融合,得到最终的分割结果,式(4):P=w㊃fʃd()+1-w()f∓d()㊃D(4)其中,w表示模点与周边区域融合的权重系数,P表示最终的遥感图像分割结果㊂通过式(4),将高分辨率遥感图像的最终结果展现出来,对比分割前后的遥感图像的效果㊂2㊀实验结果2.1㊀实验准备为了验证本文设计的基于深度学习的高分辨率遥感图像分割方法的分割精度,本文从某数据集中选取了5张高分辨率遥感图像作为实验图像,图像中包含了多种土地类型,包括植被㊁建筑㊁水体㊁道路以及其他类型,统计土地类型在遥感图像中所占的百分比,具体统计结果见表1㊂表1㊀遥感图像中土地类型的分布统计Tab.1㊀Statisticsofthedistributionoflandtypesintheremotesensingimages%图像植被建筑水体道路其他图像17.331.70.19.950.9图像266.45.321.51.15.6图像311.733.20.71.143.3图像413.241.24.23.232.1图像564.512.36.21.015.8总计23.130.35.48.233.0㊀㊀在实验中,由于5张遥感图像的像素并不相同,其中2张图像为4011ˑ6116像素,2张图像为7969ˑ5142像素,1张图像为3367ˑ4568像素,为了减少实验中偶然性的出现,将5张遥感图像全部裁剪成512ˑ512像素大小的图像㊂2.2㊀实验结果与讨论为了验证4种遥感图像分割方法的分割精度,本次实验以某次竞赛的评估方案 分割精度作为评价指标,来评价4种遥感图像分割方法㊂分割精度QA的计算如式(5)所示:QA=TPN(5)㊀㊀其中,TP表示检测的占比和实际占比相等的数量,N表示整个样本的数量㊂同时,为了保证实验的准确性和非偶然性,本次实验还设置了3个对照实验,其中,对照实验1是基于人工智能技术的高分辨率遥感图像分割方法,对照实验2基于标记分水岭的高分辨率遥感图像分割方法,对照实验3是曲波特征加权的高分辨率遥感图像统计分割方法㊂计算出4种方法的分割精度,见表2㊂采用本文所提方法对遥感图像进行分割,分割精度最高为96.7%,最低为93.5%,均值为94.68%;而对照实验的分割精度均低于90%,说明本文设计的基于深度学习的高分辨率遥感图像分割方法具有更高的分割精度,在实际应用中效果更好㊂表2㊀4种方法分割精度对比Tab.2㊀Comparisonofsegmentationaccuracybetweenfourmethods对照实验图像1(QA/%)图像2(QA/%)图像3(QA/%)图像4(QA/%)图像5(QA/%)本文94.296.793.594.294.8对照实验188.385.587.685.685.3对照实验279.483.185.884.384.5对照实验382.584.678.385.285.43㊀结束语图像分割在遥感领域中占有重要地位,图像分割能够更加快速地得到图像的整体信息㊂在深度学习的快速发展和对遥感领域的大力支持下,遥感图像的分割已经被应用到了多个领域当中㊂本文设计的基于深度学习的高分辨率遥感图像分割方法对遥感图像的分割有着一定的参考价值,虽然其中还存在些许不足,在之后的研究中会不断完善㊂参考文献[1]刘易斯.一种高分辨率遥感图像分割方法研究[J].电气自动化,2022,44(3):109-112.[2]崔昊.基于深度学习的高分辨率遥感图像海陆分割方法[J].软件导刊,2020,19(3):95-98.[3]王玉.曲波特征加权的高分辨率遥感图像统计分割方法研究[J].测绘学报,2020,49(3):402.[4]刘明威,方静,詹曙.基于深度学习的土地覆盖遥感图像分割方法[J].合肥工业大学学报(自然科学版),2022,45(6):753-759.[5]刘冠群,刘豪,王新,等.一种基于深度学习的卫星遥感图像分割方法[J].湖南城市学院学报(自然科学版),2021,30(5):54-58.[6]段明义,卢印举,苏玉.一种利用花粉算法优化的遥感图像分割方法[J].遥感信息,2021,36(1):7-12.[7]闵蕾,高昆,李维,等.光学遥感图像分割技术综述[J].航天返回与遥感,2020,41(6):1-13.851智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀。
论文推荐黄亮,姚丙秀,陈朋弟,等:高分辨率遥感影像超像素的模糊聚类分割法

论文推荐黄亮,姚丙秀,陈朋弟,等:高分辨率遥感影像超像素的模糊聚类分割法《测绘学报》构建与学术的桥梁拉近与权威的距离《测绘学报》抖音自开通以来,聚焦于测绘地理信息学术前沿进展,受到了广大专家学者的大力支持,播放量数万,粉丝1.7万。
复制链接,关注我们哦!【测绘学报的个人主页】长按复制此条消息,长按复制打开抖音查看TA的更多作品##7NsBSynuc88##[抖音口令]【引文格式】黄亮, 姚丙秀, 陈朋弟, 等. 高分辨率遥感影像超像素的模糊聚类分割法. 测绘学报,2020,49(5):589-597. DOI: 10.11947/j.AGCS.2020.20190135高分辨率遥感影像超像素的模糊聚类分割法黄亮1,2, 姚丙秀1, 陈朋弟1, 杨兴3, 付必环11. 昆明理工大学国土资源工程学院, 云南昆明 650093;2. 云南省高校高原山区空间信息测绘技术应用工程研究中心, 云南昆明 650093;3. 成都理工大学地球科学学院, 四川成都 610059收稿日期:2019-04-15;修回日期:2019-12-25基金项目:云南省应用基础研究计划面上项目(2018FB078);自然资源部地球观测与时空信息科学重点实验室经费资助项目(201911)第一作者简介:黄亮(1985-), 男, 博士, 讲师, 主要研究方向遥感影像变化检测。
E-mail:********************通信作者:姚丙秀E-mail:*****************摘要:传统模糊C均值聚类在影像分割中只考虑影像的灰度特征,导致该算法用于高空间分辨率遥感影像分割时分割结果不理想。
针对该问题,本文提出了一种高分辨率遥感影像超像素的模糊聚类分割方法。
该方法首先利用分水岭变换算法产生多个超像素子区域;然后比较各个子区域间光谱特征的相似性;最后利用融合光谱特征的模糊C 均值聚类对这些超像素子区域进行合并。
试验选用4组不同场景的遥感影像,采用定性和定量相结合的方法评价试验结果。
遥感影像处理实验报告(3篇)
第1篇一、实验背景与目的随着遥感技术的不断发展,遥感影像已成为获取地球表面信息的重要手段。
遥感影像处理是对遥感影像进行一系列技术操作,以提高影像质量、提取有用信息的过程。
本实验旨在通过实践操作,让学生掌握遥感影像处理的基本原理和常用方法,提高学生对遥感影像数据的应用能力。
二、实验内容与步骤本次实验主要包括以下内容:1. 数据准备:获取实验所需的遥感影像数据,包括光学影像、红外影像等。
2. 影像预处理:对原始遥感影像进行辐射校正、几何校正、图像增强等处理。
3. 影像分割:对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类:对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析:对分类结果进行分析,评估分类精度。
三、实验步骤1. 数据准备- 获取实验所需的遥感影像数据,包括光学影像、红外影像等。
- 确保影像数据具有较好的质量和分辨率。
2. 影像预处理- 辐射校正:对原始遥感影像进行辐射校正,消除大气、传感器等因素对影像辐射强度的影响。
- 几何校正:对原始遥感影像进行几何校正,消除地形起伏、地球曲率等因素对影像几何形状的影响。
- 图像增强:对预处理后的影像进行图像增强,提高影像对比度、清晰度等。
3. 影像分割- 选择合适的分割方法,如基于阈值分割、基于区域生长分割、基于边缘检测分割等。
- 对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类- 选择合适的分类方法,如监督分类、非监督分类等。
- 对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析- 对分类结果进行分析,评估分类精度。
- 分析分类结果中存在的问题,并提出改进措施。
四、实验结果与分析1. 影像预处理结果- 经过辐射校正、几何校正和图像增强处理后,遥感影像的质量得到显著提高,对比度、清晰度等指标明显改善。
2. 影像分割结果- 根据实验所采用的分割方法,成功提取了感兴趣的目标区域,分割效果较好。
3. 影像分类结果- 通过选择合适的分类方法,对分割后的影像进行分类,成功识别了不同的地物类型。
超高分辨率遥感影像分类与分割研究
超高分辨率遥感影像分类与分割研究随着遥感技术的不断发展,超高分辨率遥感影像成为了遥感影像处理领域的一个新研究热点。
其中,遥感影像分类与分割是超高分辨率遥感影像处理的重要应用之一。
本文将讨论超高分辨率遥感影像分类与分割的研究进展,并探讨其在实际应用中的优势。
超高分辨率遥感影像分类超高分辨率遥感影像分类是将遥感影像中的像素点分为不同的类别,如植被、水体、道路、建筑物等。
在超高分辨率遥感影像的处理过程中,分类算法是最为关键的部分之一。
传统的遥感影像分类算法主要基于像元的空间、光谱、时间等特征进行分类。
而在超高分辨率遥感影像分类中,除了这些特征,还需要考虑像素点之间的空间关系和纹理特征等因素。
针对超高分辨率遥感影像分类的研究,目前主要有以下几种方法:1. 基于机器学习的分类方法基于机器学习的分类方法主要分为监督学习和非监督学习两种。
监督学习方法需要训练样本和属性标签,并通过训练数据生成分类模型。
非监督学习方法则不需要属性标签,通过聚类算法将影像中的像素点分为不同的类别。
常见的聚类算法包括K-Means、Fuzzy C-Means等。
2. 基于深度学习的分类方法基于深度学习的分类方法是近年来较为热门的研究方向。
主要采用卷积神经网络(CNN)进行分类。
与传统算法相比,基于深度学习的算法可以自动提取图像的高级特征,从而获得更好的分类效果。
此外,基于深度学习的算法还可以处理大规模遥感影像数据,提高遥感影像分类的效率。
超高分辨率遥感影像分割超高分辨率遥感影像分割是将遥感影像中的像素点分为不同的对象,如建筑、道路、车辆等。
与遥感影像分类不同的是,分割后生成的结果更加细致、精确。
超高分辨率遥感影像分割通常分为半监督分割和全自动分割两种。
半监督分割方法需要一些初始的分割信息,可以通过手工绘制分割轮廓或者基于机器学习的方法生成。
然后利用这些信息生成初始对象,再通过区域增长、区域合并等方法进行分割。
相对而言,半监督分割的精度更高,但需要人工干预,工作量大。
高分辨率遥感影像处理方法及技巧研究
高分辨率遥感影像处理方法及技巧研究遥感影像是通过从远距离采集地球表面特定区域的光谱或辐射能信息而获取的图像。
高分辨率遥感影像具有更细致的空间分辨率,能够提供更多的细节,因此在许多领域具有广泛的应用。
然而,高分辨率遥感影像的处理是一个复杂的过程,需要使用各种方法和技巧来提取有用的信息。
本文将探讨一些常用的高分辨率遥感影像处理方法及技巧。
首先,高分辨率遥感影像的预处理是非常重要的。
预处理包括图像去噪、辐射定标、几何校正等步骤。
图像去噪是为了去除影像中的噪声,以提高影像的质量。
常用的去噪方法有中值滤波、均值滤波和小波去噪等。
辐射定标是将原始高分辨率遥感影像转换为反射率或辐射亮度,以便进行后续的分析和处理。
几何校正是为了消除图像中的几何变形,使得图像在地理坐标和投影坐标之间具有一致的映射关系。
其次,高分辨率遥感影像的特征提取是应用中的关键步骤。
特征提取可以帮助我们理解影像中的信息,并提取出我们感兴趣的目标。
常用的特征提取方法有基于像素的方法和基于对象的方法。
基于像素的方法是从单个像素出发,通过计算像素的光谱、纹理和形状等特征来表征目标。
基于对象的方法则是将像素组织成不同的对象,并提取对象级别的特征。
常见的特征提取方法包括主成分分析、支持向量机和深度学习等。
另外,高分辨率遥感影像还可以通过分类方法进行分析和处理。
分类是将遥感影像中的像素或对象分配给不同的类别。
常用的分类方法包括监督分类和无监督分类。
监督分类是利用已知类别的样本对影像进行训练,并使用分类器来确定未知样本所属的类别。
无监督分类则是根据像素的统计特征将影像分成不同的集群。
常见的监督分类算法包括最大似然分类、支持向量机和随机森林等。
此外,高分辨率遥感影像处理还需要考虑空间信息的分析。
空间信息分析是通过考虑邻域像素之间的关系来提取更多的有用信息。
常见的空间信息分析方法包括纹理分析、形态学处理和分割等。
纹理分析是通过计算像素的纹理统计特征来表征目标的纹理特性。
高分辨率遥感影像分类实验报告
高分辨率遥感影像分类实验报告班级:姓名:学号:指导老师:地球科学与环境工程学院二〇一四年六月目录1实验方法——面向对象方法 (1)2实验内容 (1)2.1 影像预处理 (1)2.1.1影像数据融合 (1)2.1.2 影像增强处理 (2)2.2 创建工程 (2)2.3 分割处理 (3)2.4 分类 (4)2.4.1 水体 (4)2.4.2陆地 (5)2.4.3 植被 (6)2.4.4 裸土 (7)2.4.5 建筑物 (8)2.4.6 道路 (9)2.4.7 阴影 (10)2.4.8 总体分类图 (12)3 结语 (13)1实验方法——面向对象方法面向对象方法是一个模拟人类大脑认知的过程,将图像分割为不同均质的对象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。
因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息,结合各种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。
面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。
首先需要使用一定方法对遥感影像进行分割,在提取分割单元(图像分割后所得到的内部属性相对一致或均质程度较高的图像区域)的各种特征后,在特征空间中进行对象识别和标识,从而最终完成信息的分类与提取。
2实验内容及详细过程2.1 影像预处理2.1.1影像数据融合实验数据为QuickBird影像,包括4个多光谱波段以及一个全色波段。
QuickBird影像星下点分辨率:全色为0.61m,多光谱为2.44m。
对于面向对象影像分类来说,越高的高空间分辨率越好,但在对对象进行分类时,光谱信息同样重要,因此,可将高分辨率的全色影像和多光谱影像进行数据融合。
使用ERDAS进行数据融合:Interpreter→spatialenchancement→resolution merge。
图 1 全色影像与多光谱影像融合2.1.2 影像增强处理影像分割算法是在亮度值的基础上建立起来的,其中包括一致性和不连续性。
高空间分辨率遥感影像分割方法研究综述
高空间分辨率遥感影像分割方法研究综述高空间分辨率遥感影像分割方法研究综述刘建华毛政元(福州大学,空间数据挖掘与信息共享教育部重点实验室,福建省空间信息工程研究中心,福州350002)摘要:遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性。
遥感影像分割是面向对象的遥感影像数据挖掘与应用中的一项关键技术,对于影像目标信息自动化提取与智能识别尤为重要,在面向对象的遥感影像处理工程中具有重要意义。
本文对常见的高空间分辨率遥感影像分割方法与应用策略进行了分析,比较了各种分割方法的应用范围、优缺点及目前存在的改进措施。
建立了面向对象的遥感影像分割方法的分类体系,最后指出了面向对象的遥感影像分割方法目前所存在的问题及应用前景。
关键词:高空间分辨率遥感影像影像分割方法应用策略进展A Survey on High Spatial Resolution Remotely Sensed ImagerySegmentation Techniques and Application StrategyLiu Jian hua Mao zheng yuan(Fuzhou University, Spatial Information Research center, Fuzhou, 350002)Abstract: Remotely sensed imagery segmentation is a process of dividing an image into different regions such that each region is, but the union of any two adjacent regions is not, homogeneous. It is one of key techniques in the object-oriented remotely sensed imagery data mining and its application, also quite essential in remote sensing image processing engineering. In this paper, we have a rough survey on different methods of high spatial resolution remotely sensed imagery segmentation, categorizing them into four groups according to the gray or color information they are exploiting. The disadvantage of current methods and the proper progress which can be attained in the near future are pointed out at the end of this essay.Keywords: High Spatial Resolution Imagery, Segmentation methods, application strategy, advances and prospects1 引言高空间分辨率遥感影像(如GeoEye、WorldView、QuickBird、IKONOS等,本文简称高分影像)在诸多领域(地形图更新、地籍调查、城市规划、交通及道路设施、环境评价、精细农业、林业测量、军事目标识别和灾害评估等)得以广泛应用[1]。
高空间分辨率遥感影像分割方法研究综述
高空间分辨率遥感影像分割方法研究综述
刘建华;毛政元
【期刊名称】《遥感信息》
【年(卷),期】2009(000)006
【摘要】遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性.遥感影像分割是面向对象的遥感影像数据挖掘与应用中的一项关键技术,对于影像目标信息自动化提取与智能识别尤为重要,在面向对象的遥感影像处理工程中具有重要意义.本文对常见的高空间分辨率遥感影像分割方法与应用策略进行了分析,比较了各种分割方法的应用范围、优缺点及目前存在的改进措施.建立了面向对象的遥感影像分割方法的分类体系,最后指出了面向对象的遥感影像分割方法目前所存在的问题及应用前景.
【总页数】7页(P95-101)
【作者】刘建华;毛政元
【作者单位】福州大学,空间数据挖掘与信息共享教育部重点实验室,福建省空间信息工程研究中心,福州,350002;福州大学,空间数据挖掘与信息共享教育部重点实验室,福建省空间信息工程研究中心,福州,350002
【正文语种】中文
【中图分类】TP751
【相关文献】
1.高空间分辨率遥感影像建筑物提取研究综述 [J], 严岩
2.高空间分辨率遥感影像建筑物提取研究综述 [J], 严岩
3.基于时刻独立脉冲耦合神经网络的高空间分辨率摇感影像分割 [J], 李利伟;马建文;欧阳赟;温奇
4.改进型 PSI 算法及其在高空间分辨率遥感影像分割中的应用 [J], 孙小丹
5.一种结合超像素和图论的高空间分辨率遥感影像分割方法 [J], 姚丙秀;黄亮;许艳松
因版权原因,仅展示原文概要,查看原文内容请购买。
高分辨率遥感图像分类算法设计与实现
高分辨率遥感图像分类算法设计与实现遥感图像分类是遥感技术应用的重要环节,它可以将遥感图像中的目标物体进行识别和分类,为地理信息系统、城市规划、环境监测等领域提供数据支持。
在高分辨率遥感图像分类中,由于图像中包含大量的细节信息,面临着分类精度提升的挑战。
本文将探讨高分辨率遥感图像分类算法的设计与实现。
一、数据预处理在进行高分辨率遥感图像分类之前,首先需要进行数据预处理。
数据预处理的目的是减少数据的冗余信息和噪声,提取有用的特征。
数据预处理包括以下几个步骤:1. 图像增强:采用直方图均衡、滤波等方法对图像进行增强,使图像更加清晰。
2. 影像配准:对多幅影像进行配准,使其位置和尺度一致,以便进行后续处理。
3. 分割:将图像分割成若干个区域,每个区域包含一个或多个目标物体,为后续的特征提取和分类做准备。
二、特征提取特征提取是图像分类算法中的关键步骤,它决定了分类的准确度。
在高分辨率遥感图像中,特征通常包括颜色、纹理、形状等。
常用的特征提取方法有:1. 多尺度特征:根据图像中目标物体的尺度不同,采用多个尺度的窗口对图像进行特征提取,以保证不同尺度目标物体的识别。
2. 颜色特征:通过提取图像中目标物体的颜色信息,包括色调、饱和度、亮度等,对目标进行分类。
3. 纹理特征:利用图像中目标物体的纹理信息进行分类,包括纹理的方向、密度、统计特征等。
4. 形状特征:通过提取目标物体的形状信息,如面积、周长、轮廓等,对目标进行分类。
三、分类算法设计基于上述提取的特征,接下来需要设计合适的分类算法。
常见的分类算法包括支持向量机(SVM)、随机森林(Random Forest)、卷积神经网络(Convolutional Neural Network,CNN)等。
根据不同的实际需求和数据特点,选择合适的分类算法进行实现。
1. 支持向量机(SVM):SVM是一种有效的分类算法,在遥感图像分类中被广泛应用。
SVM通过寻找一个最优的超平面,将数据进行分类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作业2 高空间分辨率遥感影像分割方法实验
学号:
课程代码:
姓名:
截止日期:2016.11.29
上交时间:2016.11.28
摘要:遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性。
边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点。
图像属性中的显著变化通常反映了属性的重要事件和变化。
本文使用棋盘分割算法、四叉树分割算法、多尺度分割算法三种分割算法与Canny边缘检测算法对图像进行分割和提取边缘。
并简单的对ecognition软件中设置的不同参数进行探索。
1.方法
1.1.分割
遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性。
遥感影像分割是面向对象的遥感影像数据挖掘与应用中的一项关键技术,对于影像目标信息自动化提取与智能识别尤为重要,在面向对象的遥感影像处理工程中具有重要意义[1]。
1.1.1. 棋盘分割算法
棋盘分割(Chessboard Segmentation)是易康软件中一种简单的分割算法,它将一幅影像或一个父级对象分割成许多正方形的小对象。
在分割过程中,棋盘分割算法主要用到的是分割尺度参数。
1.1.
2. 四叉树分割算法
四叉树分割法(Quadtree-Based Segmentation):当超过预定阀值时,将原始图像等分为4个子块,分别对应于四叉树树根的4个子节点[2]。
依次考虑4个子块中的每一块,当匹配误差超过预定阀值时,这个阀值可称为剪枝判同的判决标准,可以是灰度相似性,也可以是目标均方差或其他可表示目标特征的有效信息,再将此块等分成4个子块,该过程也称之为剪枝.重复这一过程直至图像中的任意一块都能找到合适的匹配块为止[3]。
下图表示一个四叉树的分割过程[4]。
图1-1 四叉树分割过程示意
1.1.3. 多尺度分割算法
多尺度分割(Multiresolution Segmentation):在指定的与感兴趣的地物目标或空间结构特征相对应的尺度下,将影像分割成高同质的、互相连结的不同影像区域,与感兴趣的地物目标或空间结构特征相对应[5]。
它是一种自下而上(bottom-up)的方法,通过合并相邻的像素或小的分割对象,在保证对象与对象之间平均异质性最小、对象内部像元之间同质性最大的前提下,基于区域合并技术实现影像分割。
1.2.Canny边缘检测
Canny[6]1986年提出了一个优良的边缘检测算子应满足以下准则:1.信噪比准则,即不漏检真实边缘,也不把非边缘点作为边缘点检出,使输出的信噪比最大;2.定位精度准则,即检测出的边缘点,尽可能在实际边缘的中心;3.单边缘响应准则,即单个边缘产生的多个响应的概率要低,虚假边缘响应得到最大抑制。
算法方框图如图[7]
图1-2 用于边缘检测的Canny算法
2. 结果与分析
2.1. 棋盘分割算法
棋盘分割算法仅仅是根据设置的分割尺度将一幅影像分割成许多正方形的小对象,与地物特征一般没有联系。
(a)对象尺寸:100 (b)(a)局部放大(c)对象尺寸:50 (d)(c)局部放大
图2-1 棋盘分割
2.2. 四叉树分割算法
关键参数:1.mode:Color模式适用于新建一个四叉树分割层;Super Object Form模式适用于在已有的一个分割层上进行四叉树分割,例如在多尺度分割的基础上再进行四叉树分割(因为上一步的分割没有实际的划分意义,所以以下均使用Color)。
2.Scale:用来决定正方形网格内最大的颜色差异。
3.Image Layer weights:用来决定哪些波段参与Scale参数的设定。
(a)尺度:60 (b)(a)局部放大(c)尺度:150
(d) (c)局部放大
(e) 尺度:60仅使用R 波段
(f) (e)局部放大
图2-2 四叉树分割算法
从图2-2可以看出尺度增大时分割出的对象减少,仅使用一个图层(R 波段)分割出的对象略微减少;尺度较大时不能有效的区分地物,尺度较小时,分割出的对象数量巨大。
2.3. 多尺度分割算法
关键参数:1.Scale parameter 是一个抽象术语,没有明确的单位。
2.Image Layer weights :用来设置参与分割的波段的权重,好处在于包含影像信息较多的波段或者对当前提取某一类专题信息用处较大的波段可以赋予较大的权重,而其他的无关紧要的波段可以不参与分割或者赋予较小的权重。
position of homogeneity criterion :同质性用来表示最小异质性,同质性由两部分组成,即颜色(光谱)和形状,两者权重之和为1.0,而形状又由光滑度和紧致度来表示,两者权重之和也为1.0,因此颜色和形状可看作“相反值”,光弧度和紧致度也可以看作“相反值”。
以图2-3(a)(尺寸:250,图层权重1:1:1,shape :0.1)标准进行了参数的更改。
(a)尺寸:250
(b)(a)局部放大
(c)尺寸:100
(d)(c)局部放大
(e)只使用图层3
(f) (e)局部放大
(g) Shape:0.5
(h) (g)局部放大
图2-3 多尺度分割
尺度用来确定生成的影像对象所允许的最大异质度,值越大则生成的影像对象的尺寸越
大,反之则越小。
图层权重分配采用1:1:1与0:0:1比较发现前者能有效的对红绿通道的差
异进行区分,而后者则对蓝通道的差异更为敏感。
Shape采用0.1与0.5相比,后者分割的
结果更为规则,边线更接近直线。
2.4.Canny边缘检测
关键参数有:1.较低阈值和2.较高阈值,取值范围[0,5],默认值为0。
在第一步骤期间,检测边缘,并且从检测到的边缘中移除具有低于较高阈值的值的像素。
在最后步骤中,具有
高于较低阈值的值的非边缘像素(因为值小于较高阈值而被删除的像素)标记为边缘节点。
在应用算法第一次之后,可以检查结果(边缘像素值)和阈值的值。
3.高斯滤波器的宽度相
对于高斯滤波器的半高全宽。
该字段确定高斯过滤器所覆盖的细节的级别。
较高的值将产生
较宽的高斯滤波器,并且较少的细节将保留用于边缘检测。
因此,只有高强度梯度边缘将由
Canny算法检测。
场的范围是0.0001-15。
默认值为1。
以默认参数(高低阈值:0,高斯滤波宽度:1,图层1)为标准进行了如图2-4所示修改参数操作,并对在Mathematica下对输出图像进行二值化处理,将大于0(浮点型/Real32)
的点赋值为1,以便显示。
(a) 默认参数(b) (a)局部放大(c) 高低阈值:0.7 (d) (c)局部放大
(e) 高斯滤波宽度:10 (f) (e)局部放大(g) Layer3 (h) (g)局部放大
图2-4 Canny边缘检测
从图2-4中可以发现,默认参数下得出大于0的地方很多,大部分地方并不是边缘;将高低阈值设置为0.7后公路边缘几乎没有被提取,部分建筑及水体边缘可以分出;将高斯滤
波宽度设置为10后,边缘变少且边缘变得较为光滑;采用Layer3(蓝通道)边缘总长度似
乎要比使用Layer1长一些,可能是Layer3相比Layer1变化更为明显。
参考文献
[1]刘建华, 毛政元. 高空间分辨率遥感影像分割方法研究综述[J]. 遥感信息,
2009(6):95-101.
[2]莫登奎, 林辉. 一种稳健的高分辨率遥感影像分割方法[C]// 全国图象图形学学术
会议. 2005.
[3]高伟, 刘修国, 彭攀,等. 一种改进的高分辨率遥感影像分割方法[J]. 地球科学-中
国地质大学学报, 2010, 35(3):421-425.
[4]任秀芳, 姬光荣, 姬光玉. 基于四叉树分割的分形图像编码改进方法[J]. 微计算机
信息, 2007, 23(30):291-293.
[5]谭衢霖, 刘正军, 沈伟. 一种面向对象的遥感影像多尺度分割方法[J]. 北京交通大
学学报, 2007, 31(4):111-114.
[6]Canny J. A Computational Approach to Edge Detection[J]. Pattern Analysis & Machine
Intelligence IEEE Transactions on, 1986, 8(6):679-98.
[7]王娜, 李霞. 一种新的改进Canny边缘检测算法[J]. 深圳大学学报(理工版), 2005,
22(2):149-153.。