537 食堂餐具自动回收车的设计(SW建模)
机械创新设计实践报告- 食堂餐盘清理卫士

创新实践报告报告题目食堂餐盘清理卫士学生姓名学号专业班级2012年6月24日食堂餐盘清理卫士一研究背景目前,很多学校及大、中型公司的食堂内都设有几个处理餐后盘中剩余饭菜的装置,由清洁服务人员手工清除餐盘中的剩菜剩饭,在清理过程中,敲打餐盘倒出剩余饭菜时还会发出阵阵噪声。
机械设计模块机械创新教育,以培养大学生的创新意识、创新能力、动手能力以及工程实践的训练为目标¨。
创新是指创新主体综合性地应用知识、经验与新的信息,通过观念的调整与转变,开展引进与研究开发新事物和对人类文明进步有益的新型活动。
我们创新小组通过分析国内厨卫机械和部分轻工机械的创新设计、绿色设计和发展趋势,针对食堂餐盘的大量手工清理工作的弊端,指导学生设计制作了“食堂餐盘清理卫士”的参赛作品。
该作品为一个自动清理及收集餐盘的机电一体化装置(模型)。
就餐人员在就餐完毕后将餐盘放到装置的输送带上,餐盘随着输送带进入清理区,由清理机构运作,将餐盘中的剩菜剩饭刷入到预置的回收桶内,然后餐盘被推杆推入到集中收集餐盘的小车桶内。
使用该装置,可减少清理餐盘剩菜剩饭的服务人员,提高清洁效率,改善就餐环境,能给食堂经营带来经济效益。
二方案设计2.1总体方案根据该装置的设计目标和要求,用三步完成清理工作。
第一步把餐盘送到清理区。
这一动作要求输送平稳,输送机构具有良好的导向能力,且输送机构的宽度要合适,不能被餐盘卡住,能使餐盘顺利进入清理区。
第二步在清理区刷掉餐盘中的剩菜剩饭。
为完成这个任务,设计了一个清理餐盘的机构并配置控制系统。
第三步把清理好的餐盘送到收集餐盘的小车中。
第二步和第三步动作具有连贯性,设计由一个机构完成。
综上所述,该装置由输送机构、清理机构和其他附属部件图1 餐盘清理机械模型组成,如图1模型所示。
该装置设计有2个自由度,其运动方向如图2所示。
X轴方向为输送带方向,餐盘由输送带送到清理区。
l,轴方向为刷子架机构往复运动方向,刷子架进程时可以把剩菜剩饭刷人预置的回收桶内,回程时可以把餐盘推入盘子收集小车内。
无人值守餐厅自动回收系统设计
无人值守餐厅自动回收系统设计作者姓名专业机械设计制造及其自动化指导教师姓名专业技术职务目录摘要 (3)ABSTRACT (1)第一章前言 (4)1.1课题研究背景 (4)1.2本课题所在研究领域的国内外技术现状 (4)1.2.1国外无人值守餐厅发展现状 (4)1.2.2我国无人值守餐厅的发展现状及水平 (6)1.3本课题研究设计的主要内容 (7)第二章无人值守餐厅自动回收系统的设计任务及内容 (6)2.1设计任务介绍及意义 (6)2.2设计任务明细 (6)2.2.1回收系统的功能 (6)2.2.2任务要求 (6)2.2.3具体步骤 (6)2.3具体设计内容 (7)2.3.1自动旋转餐桌的设计 (7)2.3.2餐具自动回收传送装置及自动分离装置的设计 (10)第三章主要零部件的选用,设计计算及校核 (12)3.1主要零部件的选用 (12)3.1.1 万向轮 (12)3.2 主要零部件的设计计算及校核 (12)3.2.1回收装置及旋转装置的电动机选用 (12)3.2.2旋转餐桌轴选用及校核 (14)3.2.3键的校核 (14)3.3设计软件的选用 (15)3.3.1 CAXA软件概述: (15)3.3.2 CAXA软件的特点: (15)第四章毕业设计总结 (17)参考文献 (18)致谢 (19)摘要本设计是面向写字楼中工作的白领群体,设计无人值守餐厅中的剩菜、餐具的自动回收系统。
在这个生活节奏越来越快的社会,人们忙于工作,常常因为午休时间短忽略就餐时间,午餐也草草了事,进而忽略了本身的健康。
随着社会科技的进步,越来越多的科技设备也出现在我们生活中,方便着我们的生活,服务着我们。
无人值守餐厅也出现在我们生活中。
无人值守餐厅可以全自动为顾客服务,客人就餐完成后,又可以自动回收饭菜及餐具,解决了就餐时间短的问题。
我设计的就是无人值守餐厅的自动回收系统。
无人值守餐厅的自动回收系统可以实现客人用餐后的剩菜及餐具回收,是无人值守餐厅的重要组成系统。
一种宽度可调餐盘车的设计和研究
技术平台题,再加上湾区在潮水的末尾处,污染物质长期存积当中,存水的自行净化能力比较弱,厦门的雨水以及一些其他方面的污水全部进入到湾区当中,水区每时每刻都在被污染物所污染。
一旦产生暴雨就会产生洪水灾害,因此排水问题一直对厦门这座城市造成了困扰,制约了厦门的发展。
随着政府文件的下发,厦门马銮湾成为了城市海绵的试点项目地。
主要将马銮湾新建或者改造的小区形成绿色屋顶、可渗透的路面和自然地面,建造向下凹陷的绿地和植物沟渠,在改造城市的同时也要对其保护,建造湿地增加蓄水性。
将“渗、滞、蓄、净、用、排”这个六大方面作为改造的核心。
“渗”主要是通过树脂材料或者吸水砖等原料,将水分快速吸收到地面当中。
“滞”是通过绿色植物、植沟区将径流出现的水流速减慢,达到滞留的效果。
“蓄”主要在城市当中开发湿地公园或者湖泊等设施对水分进行收集工作,可以在涝灾时有水可用,在洪灾时进行储水。
“净”主要是设置污水处理厂或者综合治理河道等设施,把沿海生态坡的淤泥进行清理,减少环境污染,使城市当中的水可以达到循环利用的目的。
“用”这项内容是将储存的水进行处理利用,可以对水资源短缺等方面进行运用。
“排”项目是将污水分流的管道进行清理、改造,使城市当中形成天然排水系统,地面水可以渗透到地下排水管道当中,使排水功能得到进一步的强化。
厦门马銮湾城市海绵项目不只是为厦门提供了完善经验,也为全国的沿海城市在海绵城市规划和材料选取方面做出了贡献。
2.2 哈尔滨海绵城市建设实践哈尔滨群力湿地公园、六盘水明湖湿地项目等工程,在海绵城市的理念当中得到了有效的利用,城市海绵的核心理念是不用单一化的工程解决旱涝灾害、排水问题、污水问题,强调人与自然和谐发展。
在城市建造方面采取吸水性好的材料进行路面的铺设,在地下设置相应的排水管道、蓄水湿地、净水网络等一系列的循环设施,使城市当中的水可以循环使用,深入贯彻落实可持续发展的观念,实现人与自然和谐相处。
3 海绵城市吸水材料应用思考在上述城市海绵案例当中,树脂材料可以应用于湿地建设当中,通过树脂材料强大的吸水性,将雨水进行吸收储存于树脂层当中或者渗透到地下进行储存。
全自动餐具分类回收一体机的设计
直距离为 20~30 mm,此竖直距离只有餐盘可以通过;饭
筷筛选机构的工作过程为,当餐具经过饭筷筛选机构时,
第 1 刷轴将碗中残渣扫出,推碗轴带动推碗板将碗推至第
2 传送带,餐盘从第 2 刷轴下方经过,第 2 刷轴将餐盘中的
CAO Jianmeng, LIU Jing, WANG Zhanrui, YAN Tingyu, SHI Yaolin
(College of Mechanical and Electrical Engineering,Binzhou University, Binzhou,Shandong 256600,China)
机
第 49 卷
第 01 期
电 工 程
技 术
MECHANICAL & ELECTRICAL ENGINEERING TECHNOLOGY
Vol.49 No.01
DOI: 10. 3969 / j. issn. 1009-9492. 2020. 01. 003
曹建猛,刘敬,王占瑞,等. 全自动餐具分类回收一体机的设计 [J] . 机电工程技术,2020,49 (01):7-8.
0 引言
机构、饭筷分离机构和碗盘分离机构组成。将餐具放置于
在学生餐厅、职工餐厅等构,当餐具经过勺子分离机构时,磁性转盘将勺子
。目前餐厅
吸起,挡勺板将勺子挡落在勺子滑轨,最终勺子落入勺子
多采用人工分离回收餐具,这种分类方式速度慢、效率
收集箱。餐具随传送机构向机器后方继续传输,经过饭筷
chopsticks screening mechanism, rice chopsticks separation mechanism and bowl plate separation mechanism were desinged. And a prototype was
基于外卖餐具回收系统的服务模式设计研究

基于外卖餐具回收系统的服务模式设计研究近年来,随着外卖业务的快速发展,外卖餐具的使用量也大幅增加。
外卖餐具的回收和处理一直是一个严重的环境问题。
为了解决这个问题,提高外卖餐具的回收率和再利用率,设计一个基于外卖餐具回收系统的服务模式是非常必要和重要的。
1. 智能餐具回收箱的部署为了方便顾客回收外卖餐具,可以在小区、商场、写字楼等人流较多的地点部署智能餐具回收箱。
这些回收箱配备感应器和可视化屏幕,可以自动识别餐具类型和数量,并提供语音和图像引导帮助顾客正确投放餐具。
回收箱还可以记录餐具的回收情况,实时监测箱内餐具的填充程度,以便及时清理和更换。
2. 回收餐具的物流配送回收箱内的餐具每天定期收集,并通过物流配送的方式运送到餐具回收中心。
在餐具回收中心,专门设立餐具清洗、消毒和检验的工作人员,确保回收的餐具符合卫生标准。
可以通过智能物流追踪系统,实时跟踪餐具的运输情况,确保餐具的安全和准时送达。
3. 餐具再利用和回收奖励在餐具回收中心,符合再利用条件的餐具可以进行清洗、消毒和包装后重新投入市场。
可以将清洗后的餐具提供给餐馆、食堂等餐饮企业使用,降低外卖餐具的使用量。
对于回收餐具的顾客可以给予一定的奖励,如折扣券、积分等,鼓励更多的人参与到餐具回收行动中。
4. 监管和合作机制为了保证外卖餐具回收系统的顺利进行,需要建立监管和合作机制。
政府部门可以制定相关法律法规,要求外卖企业必须配备餐具回收系统,并定期汇报餐具回收情况。
政府部门还可以提供资金和技术支持,推动外卖餐具回收系统的建设和运营。
外卖企业和餐具回收中心可以建立合作关系,共同制定餐具回收的标准和程序,确保餐具的回收和再利用达到一定的水平。
基于外卖餐具回收系统的服务模式设计主要包括智能餐具回收箱的部署、回收餐具的物流配送、餐具再利用和回收奖励以及监管和合作机制。
通过这些设计,可以提高外卖餐具的回收率和再利用率,减少对环境的影响,推动外卖业务的可持续发展。
536 食堂餐具清洗机的设计(SW建模)

前 言近几年来,中国餐饮业市场逐年膨胀,发展势头十分迅猛。
2006年,中国餐饮业销售额首度突 破万亿元大关!但是,餐饮业的卫生状况不容乐观。
在繁荣背后,隐藏有严重问题。
许多中小型餐饮企业,对 于餐具的清洗、消毒,方法原始,意识落后,仅通过简单的洗涤,甚至未进行消毒即重新使用,造 成细菌滋生,催化各类传染病的交叉感染。
国家相关部门对此高度重视,社会舆论也是深度关注! 商机,在不经意间诞生。
当年,一次性卫生餐具的兴起,造就许多财富英雄。
而如今,一次性卫生 餐具由于破坏环提供给餐饮企业,由消费者有偿使用,这种多赢的商业模式受到市场热烈欢迎。
一 时间,投保,使用中易受污染等问题,已远远不能满足市场标准及要求。
国家逐渐出台:限制一次 性筷子的生产和销售。
在此背景下,专业消毒餐具企业应运而生。
消毒餐具厂把餐具集中消毒后, 资消毒餐具企业厂,成为市场中的热门项目,许多投资者瞬间暴富!质量高低不齐,更加深了消费 者的抱怨。
于是突然间,消毒餐具市场进入盘整洗牌阶段。
好项目不会让人失望。
很快,消毒餐具 市场在发展中壮大, 但在发展中遇到了一些问题。
首先, 有消费者对于有偿使用消毒餐具提出异议; 其次,由于投资者层次不一,造成消毒餐具市场的服务场再次火爆。
原因是:消费者的消费观念发 生变化,认识到中小型餐饮企业的清洗、消毒品牌连锁的餐具消毒企业通过规范流程及专业服务, 确立了市场地位,建立了良性循环;再加上,有些地方政府倡导使用餐具集中消毒,激发了投资者 的信心。
餐具毕竟无法和专业公司相比。
越来越多的消费者接受和选择有偿使用消毒餐具;其次, 有些关键词:餐具浸泡;清洗;运输;冲洗目 录1 绪论 (1)1.1 研究对象及内容.............................................................................................................................1 1.2 研究目的.........................................................................................................................................1 1.3 可行性分析.....................................................................................................................................1 1.5 本课题需要重点研究的、关键的问题及解决的思路.................................................................1 2 餐具清洗机的结构及工作原理. (2)2.1 清洗机的结构.................................................................................................................................2 2.2 清洗机的工作过程.........................................................................................................................2 2.3 清洗机的传动部分.........................................................................................................................3 3 动力源的选择 (3)3.1 电机的选择.....................................................................................................................................3 3.2 各级传动比的确定.........................................................................................................................4 3.3 运动参数及动力参数计算.............................................................................................................4 4 带传动的设计与计算. (5)4.1 设计功率.........................................................................................................................................5 4.2 选择带型.........................................................................................................................................5 4.3 确定大、小带轮的基准直径.........................................................................................................5 4.4 验算带速.........................................................................................................................................5 4.5V 带的基准长度 d L和中心距 a ....................................................................................................5 4.6 验算小带轮包角.............................................................................................................................5 4.7V 带根数.........................................................................................................................................5 4.8 作用在带轮轴上的压力.................................................................................................................6 4.9 带轮的结构设计.............................................................................................................................6 5 链轮的设计. (6)5.1 链轮齿数.........................................................................................................................................6 5.2 链条节数.........................................................................................................................................6 5.3 计算功率.........................................................................................................................................7 5.4 链条节距.........................................................................................................................................7 5.5 实际中心距,设中心距可调.........................................................................................................7 5.6 计算链速.........................................................................................................................................7 5.7 作用在轴上的压力.........................................................................................................................7 6 轴 3 的设计. (7)6.1 材料的选择.....................................................................................................................................7 6.2 轴上元件的定位.............................................................................................................................8 6.3 轴的扭转刚度校核计算.................................................................................................................9 7 清洗机主要部分. (9)7.1 清洗机的动力传动部...................................................................................................................10 7.2 清洗浸泡装置...............................................................................................................................11 7.3 传送洗刷装置...............................................................................................................................12 7.4 餐具接收装置...............................................................................................................................12 7.5 总体结构及其装置之间的连接...................................................................................................12 总 结.........................................................................................................................................................14 致 谢.........................................................................................................................................................15 参 考 文 献.. (16)1 绪论1.1 研究对象及内容清洗作为一种人们日常生活中的基本活动,大家已经习以为常,普遍到没有人重视。
537 食堂餐具自动回收车的设计(SW建模)

关键词:餐具;自动回收;几何特征
目 录
1 绪论 ............................................................................. 1 1.1 课题来源及研究的目的和意义 ................................................. 1 1.2 本课题所涉及的问题在国内(外)研究现状及分析 ............................... 1 1.3 对课题所涉及的任务要求及实现预期目标的可行性分析 ........................... 1 1.4 本课题需要重点研究的、关键的问题及解决的思路 ............................... 1 2 设计内容......................................................................... 2 2.1 工作原理 ................................................................... 2 2.2 设计的内容 ................................................................. 3 2.3 设计的要求 ................................................................. 3 2.4 设计任务 ................................................................... 3 3 动力及传动部分的设计 ............................................................. 3 3.1 电动机类型和结构的选择 ..................................................... 3 3.2 传动比计算 ................................................................. 4 3.3 轴及轴上零件的设计 ......................................................... 5 3.4 链轮的设计计算 ............................................................ 10 3.5 链传动方案的确定 .......................................................... 11 总 结............................................................................. 12 致 谢............................................................................. 13 参考文献....................................................................计,2006 年全国餐饮企业数量已达 500 万家,学校、企业的内部食堂餐具分类 及剩饭菜分离主要依靠人工进行, 劳动强度大, 效率低, 特别是就餐高峰时期, 需回收的餐具量大, 往往难以及时将餐具分类处理, 导致餐具大量堆积, 剩饭菜无法及时清理, 影响了环境卫生。目前, 市场缺少餐具自动分类回收设备,国外的餐具自动回收清洗机较为先进,自动化标准化水平较高, 很值得我们借鉴,但是成本较高。 我国城镇大小餐厅己达到 1.6 亿户,即使每年只有 1%的用户购买餐具回收车,其年市场需求 也在百万台以上,可见小型化餐具回收车在我国具有巨大的市场潜力。制约餐具回收车在我国市场 上发展的主要瓶颈还是其性能,过去几年的市场调研数据显示,用户比较顾虑餐具回收车的回收能 力、分类效果、耗电量及操作是否方便等。因此,开发出具有高效率、节电、操作方便和人机界面 友好的自动餐具回收机是有巨大市场的。 本设计基于筷、勺、碗、碟及剩饭菜之间几何特征、形状特征、物料特性的差异,通过结构创 新性设计及工作参数优化,实现碗、碟、筷的自动、快速分类及剩饭菜的分离。本设计是针对我校 食堂的常见餐具,不使用机电自动控制及编程技术,是纯机械式机器,采用纯机械设计,是为了降 低成本,使用方便,维修简便,本设计原理可靠,结构简单,减低人工劳动强度,提高工作效率, 并且保证不损伤餐具。此设计减轻了人力劳动,分离分类准确可靠,适用于高校企业等饮食场所对 碗、盘 筷的分离分类。
食堂餐具自动回收车的设计

前言据相关部门统计,2006年全国餐饮企业数量已达500万家,学校、企业的内部食堂餐具分类及剩饭菜分离主要依靠人工进行,劳动强度大,效率低,特别是就餐高峰时期,需回收的餐具量大,往往难以及时将餐具分类处理,导致餐具大量堆积,剩饭菜无法及时清理,影响了环境卫生。
目前,市场缺少餐具自动分类回收设备,国外的餐具自动回收清洗机较为先进,自动化标准化水平较高,很值得我们借鉴,但是成本较高。
我国城镇大小餐厅己达到1.6亿户,即使每年只有1%的用户购买餐具回收车,其年市场需求也在百万台以上,可见小型化餐具回收车在我国具有巨大的市场潜力。
制约餐具回收车在我国市场上发展的主要瓶颈还是其性能,过去几年的市场调研数据显示,用户比较顾虑餐具回收车的回收能力、分类效果、耗电量及操作是否方便等。
因此,开发出具有高效率、节电、操作方便和人机界面友好的自动餐具回收机是有巨大市场的。
本设计基于筷、勺、碗、碟及剩饭菜之间几何特征、形状特征、物料特性的差异,通过结构创新性设计及工作参数优化,实现碗、碟、筷的自动、快速分类及剩饭菜的分离。
本设计是针对我校食堂的常见餐具,不使用机电自动控制及编程技术,是纯机械式机器,采用纯机械设计,是为了降低成本,使用方便,维修简便,本设计原理可靠,结构简单,减低人工劳动强度,提高工作效率,并且保证不损伤餐具。
此设计减轻了人力劳动,分离分类准确可靠,适用于高校企业等饮食场所对碗、盘筷的分离分类。
关键词:餐具;自动回收;几何特征目录1绪论 (1)1.1课题来源及研究的目的和意义 (1)1.2本课题所涉及的问题在国内(外)研究现状及分析 (1)1.3对课题所涉及的任务要求及实现预期目标的可行性分析 (1)1.4本课题需要重点研究的、关键的问题及解决的思路 (1)2 设计内容 (2)2.1工作原理 (2)2.2设计的内容 (3)2.3设计的要求 (3)2.4设计任务 (3)3动力及传动部分的设计 (3)3.1电动机类型和结构的选择 (3)3.2传动比计算 (4)3.3轴及轴上零件的设计 (5)3.4链轮的设计计算 (10)3.5链传动方案的确定 (11)总结 (12)致谢 (13)参考文献 (14)1绪论1.1课题来源及研究的目的和意义据相关部门统计,2006年全国餐饮企业数量已达500万,家学校、企业的内部食堂餐具分类及剩饭菜分离主要依靠人工进行,劳动强度大,效率低,特别是就餐高峰时期,需回收的餐具量大,往往难以及时将餐具分类处理,导致餐具大量堆积,剩饭菜无法及时清理,影响了环境卫生。
基于Solidworks的餐具回收清洗一体机设计
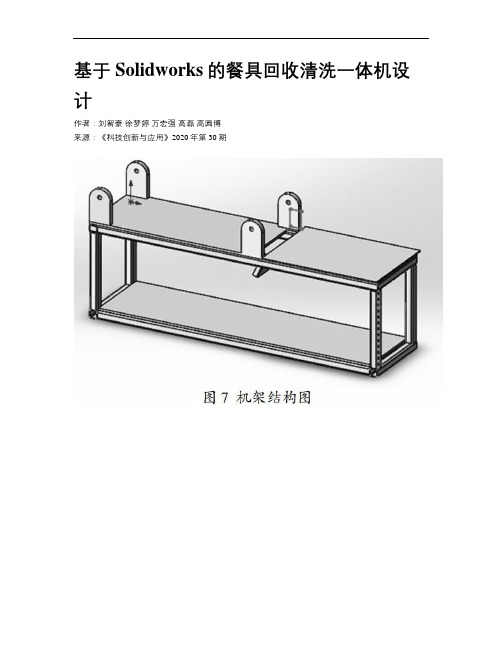
基于Solidworks的餐具回收清洗一体机设计作者:刘智豪徐梦婷万宏强高磊高圆博来源:《科技创新与应用》2020年第30期摘; 要:针对食堂、餐厅就餐后餐具回收清洗过程繁琐,投入大量劳动力的问题,基于Solidworks软件设计了一款餐具回收清洗一体机,由输送机构、残食清理机构、清洗机构等几部分构成。
可实现对餐具内残食清理、餐具清洗、餐具收纳功能。
该设备可代替人工进行餐具回收清洗,具有良好的经济性和广阔的应用前景。
关键词:Solidworks;餐具收集;餐具清洗;餐具整理中图分类号:TS972.2 文献标志码:A; ; ; ; ;文章编号:2095-2945(2020)30-0030-03Abstract: This paper analyzes the problem of cumbersome and wasteful tableware recycling and cleaning process after dining in restaurants and restaurants. Based on Solidworks software, a tableware recycling and washing machine is designed, which consists of several parts, such as conveying mechanism, residual food cleaning mechanism and cleaning mechanism. The utility model can realize the functions of cleaning the residual food in the tableware, cleaning the tableware, and storing the tableware. The equipment can replace manual cleaning and washing of tableware, and has good economy and broad application prospects.Keywords: Solidworks; tableware collection; tableware cleaning; tableware finishing引言餐具清洗、整理一体机发展较快,餐具清洗机已经成为宾馆、饭店和家庭必备的厨房用品,普及率不断提高,并向系列化、组合化方向发展[1-2]。
餐具回收自动化处理系统[实用新型专利]
![餐具回收自动化处理系统[实用新型专利]](https://img.taocdn.com/s3/m/48b396c4ed630b1c58eeb547.png)
专利名称:餐具回收自动化处理系统
专利类型:实用新型专利
发明人:卢明亮,阮万添,张家玺,王俊杰,陈沪申请号:CN201921341883.7
申请日:20190819
公开号:CN210902889U
公开日:
20200703
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种餐具回收自动化处理系统,其利用餐盘及托盘与碗碟的分离机构可以自动将碗碟从餐盘或托盘上分离出来,并初步将碗碟中的残羹倒出,对碗碟进行初步清洗,并将从碗碟上剥落的残渣推入残渣桶。
而托盘及餐盘则沿着混合输送带继续往前传送,再利用托盘与餐盘的分离机构对托盘及餐盘进行二次分离,使碗碟、托盘及餐盘完成分离,分离后的碗碟、托盘及餐盘再分别进行清洗、消毒、烘干及回收操作,实现餐具从餐厅到洗碗间的自动化清洗过程。
混合输送带可以摆放在餐厅,取代现有的餐具收集台以及残羹台,保持洁净的用餐环境,且无需专人收集餐具,无需专人分拣餐具,节省人工,减轻劳动强度。
申请人:厦门申颖科技有限公司
地址:361000 福建省厦门市厦门火炬高新区创业园创业大厦310A室
国籍:CN
代理机构:北京康盛知识产权代理有限公司
代理人:梁锦平
更多信息请下载全文后查看。
一种翻转式食堂自动餐盘回收车

专利名称:一种翻转式食堂自动餐盘回收车专利类型:发明专利
发明人:刘琳,陈烈胜
申请号:CN202111331961.7
申请日:20211111
公开号:CN114056844A
公开日:
20220218
专利内容由知识产权出版社提供
摘要:本发明公开了一种翻转式食堂自动餐盘回收车,涉及餐具设备技术领域,包括固定板和外壳,固定板的上表面中心处固定连接有弹簧伸缩杆一,弹簧伸缩杆一的上端固定连接有放置板,放置板的后端左右两侧均固定连接有连接杆一,连接杆一远离放置板的一端固定连接有连接块一,放置板的前端固定连接有连接杆二,连接杆二远离放置板的一端固定连接有连接块二,连接块一和连接块二的上端两侧均固定连接有侧板,侧板的内侧面通过轴承和转轴转动连接有齿轮,齿轮的上端固定连接有夹板,解决了由于餐盘中心处与边缘部位具有一定的高度差,导致扫盘刷无法彻底触碰到餐盘内的剩菜,容易造成剩菜的残留,清除不够干净,还需要人工再处理,效率不佳的技术问题。
申请人:上海工程技术大学
地址:201620 上海市松江区龙腾路333号
国籍:CN
代理机构:安徽思沃达知识产权代理有限公司
代理人:赵瑜
更多信息请下载全文后查看。
一款餐厨垃圾车的整车设计与布置
一款餐厨垃圾车的整车设计与布置随着社会的发展,人们的生活水平不断提高,吃喝玩乐无不体现在我们的餐桌上。
而随之而来的,就是越来越多的餐厨垃圾。
对于垃圾的处理,一直是一个社会关注的焦点。
如何高效、环保地处理餐厨垃圾,成了现今社会急需解决的问题。
而餐厨垃圾车的诞生,无疑为这一社会问题的解决提供了一个有效的解决方案。
一款优秀的餐厨垃圾车,不仅需要在技术和功能上经过精心设计,同时还需要人性化的整车设计与布置,为后期使用者提供更加便捷的服务。
下面,本文将深入探讨一款餐厨垃圾车的整车设计与布置。
餐厨垃圾车的整车设计需符合人体工程学原理,让操作者能够更加舒适地使用车辆。
车辆的驾驶室、操作面板以及座椅等部分需要经过精心设计,考虑到人体工程学的原理,保证操作者在操作过程中的舒适性和高效性。
餐厨垃圾车的布置要科学合理,具备高效作业能力。
通常,一款餐厨垃圾车的车厢内部应该包括储料间、处理间、车身和工作台等区域。
储料间用来储存收集到的餐厨垃圾,处理间用来进行垃圾的处理和分拣,车身和工作台用来进行车辆的操作和维护。
通过科学合理的布局,可以提高工作效率,降低资源浪费,减少操作者的体力消耗,从而为餐厨垃圾的处理提供更加便捷的服务。
餐厨垃圾车的整车设计与布置还需要考虑到环保与节能。
随着人们对环保意识的逐渐提高,环保已经成为各行业发展的主题之一。
一款优秀的餐厨垃圾车应该具备高效的餐厨垃圾处理技术,减少对环境的污染,同时在车辆的设计与布置上,应该提倡节能减排的原则,减少资源消耗,为环保事业贡献一份力量。
一款餐厨垃圾车的整车设计与布置需要考虑到人体工程学、高效作业能力、环保与节能以及安全性等多个因素。
只有这样,才能保证餐厨垃圾车在使用过程中能够为人们的生活提供更加便捷的服务,同时也能为环境保护贡献自己的一份力量。
希望未来,能够有更多的优秀餐厨垃圾车问世,为人们的生活带来更多的便利与美好。
食堂餐具回收车[实用新型专利]
![食堂餐具回收车[实用新型专利]](https://img.taocdn.com/s3/m/f625d91f7c1cfad6185fa7b2.png)
专利名称:食堂餐具回收车专利类型:实用新型专利
发明人:伊剑波,曾莹
申请号:CN201320189966.5申请日:20130416
公开号:CN203220099U
公开日:
20131002
专利内容由知识产权出版社提供
摘要:本实用新型涉及一种食堂餐具回收车。
其技术方案是:在回收车主体上设有剩菜收集槽、托盘收集槽、筷子收集槽、不锈钢碗收集槽等,所述的回收车主体的表面设有剩菜收集槽、托盘收集槽、筷子收集槽和不锈钢碗收集槽;其中,剩菜收集槽设有防护网,下部设有剩菜回收桶;托盘收集槽为倾斜滑道结构,底部连接托盘回收桶;筷子收集槽为长方体结构,下部连接筷子回收抽屉;所述的不锈钢碗收集槽设置在回收车主体上部的两侧,底部连接不锈钢碗回收桶。
有益效果是:减少食堂工作人员的工作量,提高了工作效率。
餐具的分类回收和规划有利于营造整洁有序的就餐环境。
另外,本实用新型设计合理,加工方便,操作简单,经济实用。
申请人:中国石油大学(华东)
地址:266580 山东省青岛市经济开发区长江西路66号
国籍:CN
代理机构:东营双桥专利代理有限责任公司
代理人:罗文远
更多信息请下载全文后查看。
机械工程实验---餐盘回收机答辩
Company
LOGO
❖
树立质量法制观念、提高全员质量意 识。20.12.2720.12.27Sunday, December 27, 2020
❖
人生得意须尽欢,莫使金樽空对月。02:40:0502:40: 0502:4012/27/2020 2:40:05 AM
❖
安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20.12.2702:40:0502:40D ec-2027-Dec- 20
总结
能力锻炼
基本设计技能
学习solidworks 与adams等设计 软件。
掌握相关资料获 取方法及途径。
了解ZBS-C 机构创新设计实验 台搭建方法。
创新能力
不同创新方案的 寻找能力。
创新设计方案的 可行性分析论证能 力。
对创新方案具体 化、完善并实施能 力。
团队合作
向合作者清晰表 达自己观点能力。
Company Logo
ADAMS分析
Joint 6(牛头刨中 间支点)受力分 析图
从上面图可以看出,Joint 6出受到了很大的 力与扭矩,这可能是因为此处离两端点较远, 因而由于力矩的作用使其受力比较大的缘故。 因此在设计过程中,应注意加厚此处的材料, 增强其强度与刚度,提高其安全阈值,以避免 断裂等突发情况。
Company Logo
ADAMS分析
推杆速度分析 在餐盘推出时的速度为波峰较 小的曲线,餐盘收回时的速度 为波峰较大的曲线。这样的速 度分布正好符合我们的设计, 因为这样正好可以使餐盘在推 出时更平稳,便于餐盘的收集; 而推完餐盘后可以快速收回。
推杆加速度分析
推杆推出时平均加速度较小, 收回时加速度较大。而中间的 突起是因为有了干涉或其他干 扰因素。
智能送餐车的设计

智能送餐车的设计刘敬;董祺成;潘宏排;陈家武【摘要】以STM32F103VET6型单片机为控制核心,设计了一款集点餐、送餐、回收餐具于一体的智能送餐车.该智能送餐车主要由控制系统、传动系统、动力系统以及其他辅助部件组成,通过光电探测感应布线实现送餐机的路径识别,结合传感器和传动机构实现餐品传送和餐具回收.【期刊名称】《滨州学院学报》【年(卷),期】2018(034)004【总页数】5页(P69-72,77)【关键词】智能送餐;循迹小车;光电探测;餐具回收【作者】刘敬;董祺成;潘宏排;陈家武【作者单位】滨州学院机电工程学院,山东滨州256603;滨州学院机电工程学院,山东滨州256603;滨州学院机电工程学院,山东滨州256603;滨州学院机电工程学院,山东滨州256603【正文语种】中文【中图分类】TP242随着社会的快速发展,人们对餐饮的消费能力不断提高,各种新型餐饮形式层出不穷[1]。
餐饮行业随之发展的同时,面临着劳动力成本提升、管理人才匮乏、成本控制难等多方面问题,行业竞争日趋热烈,又因就餐人员数目增加,餐饮服务人员的数目不能满足需求,经常会出现送餐速度慢、送错餐桌、等待时间长等问题[2-3]。
另外,服务人员过度劳累,会降低工作效率和服务质量,进而限制餐饮业的发展。
因此,有必要设计一款智能自动送餐车,以更好地服务消费者并提高餐饮业工作效率[4-7]。
1 总体方案设计1.1 设计理念本产品的基本设计理念是高效、省功和人机交互。
以期能够满足在当前科技时代的状况下全新舒适要求的解决方案,创新管理,提高餐饮行业运营效率,增强对顾客的吸引力,以在激烈的市场竞争中把握先机。
1.2 硬件结构设计图1 智能送餐车整体结构示意图本文所设计的智能送餐车以目前市面上主流单片机STM32F103VET6为控制核心,由传菜及菜品展示模块、餐具回收模块、汲水模块、运动模块组成,整体结构设计如图1所示。
智能送餐车运动模块通过光电传感器感应地面上的布线,从而控制电机的正反转来实现送餐车巡线,通过独立按键控制送餐车去向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本设计要求: (1)要求毛Fra bibliotek筒的转速为 100r/min,要求保证转速尽可能均匀; (2)餐具在链条上传动速度为 0.3m/s 左右可保证效率; (3)电动机规格自选。
2.2 设计的内容 本设计是针对我校食堂的常见餐具,不使用机电自动控制及编程技术,是纯机械式机器,采用 纯机械设计,是为了降低成本,使用方便,维修简便,本设计原理可靠,结构简单,减低人工劳动 强度,提高工作效率,并且保证不损伤餐具。 (1)总体设计:使用电动机,减速器,轴,链轮,链条,皮带传动等简单机械的组合。(绘制 总装图、绘制 soildworks 装配图呈现整机结构) (2)零部件设计:①餐具自动回收车机架 ②传动轴 ③链轮 ④传动轴的设计和校核。 2.3 设计的要求 (1)对象为人流量大的食堂,因此需要产品体积小,体积小,移动方便,操作简单,成本低。 (2)部件设计时应尽量避免焊接及刚性固定,应多采用灵活的螺栓等方式固定,以方便安装 和拆卸,并有利于维修。 (3)设计时考虑加工工艺性和装配工艺性,尽量使用标准件,通用件,降低制造成本。 (4)采用较为人性化的设计理念,方便劳动者的操作和使用,减少劳动者的体力消耗。 2.4 设计任务 (1)根据工艺动作要求拟定运动循环图; (2)根据选定的原动机和执行机构的运动参数拟定机械传动方案,分配传动比,并在报告上画 出传动方案图; (3)进行轴的设计及校核; (4)进行齿轮的设计及校核; (5)餐具倾倒、分离机构设计; (6)对机械传动系统和执行机构进行运动尺寸计算; (7)编写设计计算说明书。
关键词:餐具;自动回收;几何特征
目 录
1 绪论 ............................................................................. 1 1.1 课题来源及研究的目的和意义 ................................................. 1 1.2 本课题所涉及的问题在国内(外)研究现状及分析 ............................... 1 1.3 对课题所涉及的任务要求及实现预期目标的可行性分析 ........................... 1 1.4 本课题需要重点研究的、关键的问题及解决的思路 ............................... 1 2 设计内容......................................................................... 2 2.1 工作原理 ................................................................... 2 2.2 设计的内容 ................................................................. 3 2.3 设计的要求 ................................................................. 3 2.4 设计任务 ................................................................... 3 3 动力及传动部分的设计 ............................................................. 3 3.1 电动机类型和结构的选择 ..................................................... 3 3.2 传动比计算 ................................................................. 4 3.3 轴及轴上零件的设计 ......................................................... 5 3.4 链轮的设计计算 ............................................................ 10 3.5 链传动方案的确定 .......................................................... 11 总 结............................................................................. 12 致 谢............................................................................. 13 参考文献.......................................................................... 14
电动机所需工作功率按式:P d =
p w h a
(3-1) (3-2)
P w = FV kW
1000 F = mM gn =2.4 ´ 120=86.4N
因此: P d =
FV kW 1000h a
2 设计内容
2.1 工作原理
1、机架 2、进料滑板 3、传送链 4、前后挡板 5、传动皮带轮 6、翻转分离弯槽 7、毛刷辊 8、传动链条 9、减速机 图 21 整机结构图 当筷、碗、盘放在进料滑板上,较小的筷子勺子从开有纵横槽的缝隙中落下,由收集箱集中。 较大的碗和盘落到传送链上继续运动,首先被前挡板的斜面集中到传送链的左侧继续运动,到达后 挡板时,高度低的餐盘从留有的间隙中通过,高度高的瓷碗和铁碗被后挡板分离到右侧继续运动。 到达传送链的末端, 进入到有开槽的半圆形翻转槽, 此时餐具将随着弯槽翻转, 倒掉餐具内的残余, 同时在翻转弯槽的后侧有带毛刷的滚动辊将餐具内的残余继续清洁。 清洁后的餐具在重力作用下由 落料滑板继续向下运动,低的餐盘和高的碗在不同的滑道内。在瓷碗和鉄碗滑道内开有圆形空,由 于瓷碗和铁碗的半径不一样,所以可以将其分开。此设计减轻了人力劳动,分离分类准确可靠,适 用于高校企业等饮食场所对碗、盘 筷的分离分类。 原始数据如下表: 表 2-1 食堂常用餐具尺寸
1 绪论
1.1 课题来源及研究的目的和意义 据相关部门统计,2006 年全国餐饮企业数量已达 500 万,家学校、企业的内部食堂餐具分类 及剩饭菜分离主要依靠人工进行, 劳动强度大, 效率低, 特别是就餐高峰时期, 需回收的餐具量大, 往往难以及时将餐具分类处理, 导致餐具大量堆积, 剩饭菜无法及时清理, 影响了环境卫生。 目前, 市场缺少餐具自动分类回收设备,国内高校(3000 所左右)、企业等的大型食堂需要投入大量的人 力进行餐具分类回收及剩饭菜分离。本设计有利于降低劳动强度,提高回收效率,保证环境卫生, 市场应用前景十分广阔。本产品基于筷、勺、碗、碟及剩饭菜之间几何特征、形状特征、物料特性 的差异,通过结构创新性设计及工作参数优化,实现了碗、碟、筷的自动、快速分类及剩饭菜的分 离。 据资料统计,我国城镇大小餐厅己达到 1.6 亿户,即使每年只有 1%的用户购买餐具回收车, 其年市场需求也在百万台以上,可见小型化餐具回收车在我国具有巨大的市场潜力。制约餐具回收 车在我国市场上发展的主要瓶颈还是其性能,过去几年的市场调研数据显示,用户比较顾虑餐具回 收车的回收能力、分类效果、耗电量及操作是否方便等。因此,开发出具有高效率、节电、操作方 便和人机界面友好的自动洗碗机是有巨大市场的。根据相关预测,随着餐具回收车性能不断改善和 消费者认识不断提高,小型餐具回收车将成为我国“21 世纪厨房新亮点。为满足当前市场需要, 本着“高效、节能、友好、安全、低成本”相统一的原则,设计出餐具回收车。 1.2 本课题所涉及的问题在国内(外)研究现状及分析 虽然国外有很多自动餐厅,而且自动回收餐具的机械比较多,但是成本较高。并且大多数产品 功能单一,人性化不足,很难适应当前市场需求。我国是人口大国,我国餐具回收车的开发和生产 起步较晚,直至 90 年代初才逐渐发展起来,目前共有 20 余家厂家生产此类产品。但国内的普及率 尚不高,尚属超前消费产品。餐厅自动回收车在我国也有着飞速的发展。在我国各个城市都陆续出 现了有自动回收车的自动餐厅。当服务人员将餐桌上的各种餐具、酒具一一装筐,并把筐子装在小 推车上,缓步推向餐具、酒具清洗消毒工作间,到这个工作间后,自动餐具回收清洗机将整筐的餐 具、酒具送入清洗消毒机内。该机器的工作程序是 :分类-清洗-消毒-烘干,之后,包装机器人将 烘干后的餐、酒具分别用塑料薄膜封好,并送餐、酒具库内,以备顾客到时拿出使用。 通过查阅资料和社会调查,我发现国内有自动回收清洗的自动餐厅也有着各种不足,没有充分 的全自动化,而全自动的餐具回收餐厅的发展在国内还有着很大的空间。餐厅自动回收车在我国也 有着飞速的发展。在我国各个城市都陆续出现了有自动回收车的自动餐厅。 1.3 对课题所涉及的任务要求及实现预期目标的可行性分析 通过查阅资料和社会调查,我们发现国内有自动回收清洗的自动餐厅也有着各种不足,没有充 分的全自动化。因此,设计出基于筷、勺、碗、碟及剩饭菜之间几何特征、形状特征、物料特性的 差异,实现碗、碟、筷的自动、快速分类及剩饭菜的分离的餐具自动回收车在国内还有着很大的发 展空间。 1.4 本课题需要重点研究的、关键的问题及解决的思路 成功设计出餐具自动回收车应有以下几个任务要求: (1)高效。 (2)节能。 (3)安全。当餐具回收车在回收过程中出现了异常情况,洗碗机应停止工作,且报警提示。 (5)低成本。系统设计中,在达到控制要求的基础上,尽可能地考虑其经济性。
3 动力及传动部分的设计
3.1 电动机类型和结构的选择 因为本传动的工作状况是:工作机空载启动,有轻微振动,经常满载,单向运转,单班制工作, 使用期限 15,每年工作 300 天,运输机允许速度误差 5%。 按工作要求和条件,选用三相笼形异步电动机,封闭式结构,电压 380V,Y 型。 选择电动机容量 为保证工作效率传送链工作速度选取 3m/s 左右。