利用舵机制作简易机器人
(完整版)基于单片机控制的双足行走机器人的设计

基于单片机控制的双足行走机器人设计摘要:21世纪机器人发展日新月异,从传统的履带式机器人到如今的双足行走机器人,机器人的应用范围越来越广。
本系统以单片机(STC89c52)为系统的中央控制器,以单片机(STC12c5410ad)为舵机控制模块。
将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等有机结合,构成整个双足行走机器人,达到行走、做动作的目的。
单片机中央控制器与舵机控制器以串口通信方式实现。
系统的硬件设计中,对主要硬件舵机控制器和STC89C52单片机及其外围电路进行了详细的讲述。
硬件包括舵机控制器,STC12C5410AD 单片机,按键,各种传感器和数据采集与处理单元。
软件包括单片机初始化、主程序、信号采集中断程序、通过串口通讯的接收和发送程序。
论文的最后部分以双足行走机器人为基础,结合传感器,外围控制设备组成控制系统,并给出了此系统应用领域的一些探讨和研究。
关键词:单片机;舵机控制; STC12C5410ADBipedal robot design based on MCUAbstract:In the 21st century robot development changes with each passing day, from the traditional crawler robot to now bipedal robot, the robot's application scope is more and more widely.This system by single chip microcomputer (STC89c52) as the central controller in the system, STC12c5410ad MCU as the steering gear control module. The central controller and the servo controller, Steering gear, all kinds of sensing and control components such as organic combination, make up the whole bipedal robot, the purpose of to walk, do the action.Single chip microcomputer central controller and the servo controller to realize serial communication way.System hardware design, the main hardware servo controller and STC89C52 single-chip microcomputer and peripheral circuit in detail. Hardware including servo controller, STC12C5410AD micro controller, buttons, all kinds of sensor and data acquisition and processing unit. Software includes MCU initialization, the main program, and interrupts program signal collection, through a serial port communication to send and receive procedures. The last part of the paper on the basis of bipedal robot, combined with the sensor, the peripheral control device of control system, this system is also given some discussions and research in the field of application.Keywords:MCU; Servo Control; STC12C5410AD目录第一章绪论 (5)1.1课题背景 (5)1.2课题研究的目的及意义 (6)1.3系统设计主要任务 (7)第二章系统方案设计 (8)2.1机器人自由度选择 (8)2.2机器人结构的设计 (8)2.3驱动方案选型 (8)2.4系统总体设计 (9)第三章系统硬件电路设计 (10)3.1单片机控制模块 (6)3.2 舵机控制模块 (11)3.3 传感器模块电路设计 (12)3.4按键电路设计 (12)3.5机器人电源及通信系统设计 (13)第四章系统软件设计 (15)4.1程序流程图 (15)4.2控制流程图 (16)4.3动作数据采集 (16)4.4数据库的建立 (17)第五章系统整机调试及功能测试 (18)5.1舵机控制控制模块调试 (18)5.2舵机调试 (18)5.3红外传感设备调试 (19)5.4按键测试 (19)5.5整机调试 (19)第六章设计总结及技术展望 (20)参考文献 (21)附录 (21)第一章绪论1.1 课题背景1920年捷克斯洛伐克作家卡佩克写了一本小说叫《罗萨姆的机器人万能公司》。
自做六自由度双足步行机器人

自制六自由度双足机器人一、制作六自由度双足机器人步骤:1、确定舵机:舵机的好坏直接影响机器人的效果;2、自制舵机后盖:它是连接舵机和U型架的重要组成部件;(买一个标准的舵机后盖是最好不过,但你的动手能力和思考问题解决问题的能力就没有提高,因此我选择自制一个舵机后盖)①选择铁皮为制作材料;②测量舵机尺寸,截取合适铁皮条(尺寸为20mm*116mm);③折弯,注意左右对称;④确定固定用定位孔的位置,并使用1mm钻头打孔;⑤打固定用螺丝孔(使用3mm钻头);⑥确定舵机输出同轴定位孔的位置,并使用1mm钻头打孔;⑦打舵机输出同轴螺丝孔(使用3mm钻头);⑧打舵机后盖过线孔(6mm*8mm);注:脚上的舵机后盖比较特殊,要考虑它要和脚底板相连,我的解决方法是在上述舵机后盖的基础上,增加宽度,并折弯,打孔,同脚底板相连。
3、自制U型架:在双足机器人中,舵机相当于人的关节,那U型架就是人的骨骼。
U型架的制作:(以下是我的设计,可根据具体需求,自行设计尺寸)①选择铝合金板(厚度一般为1.5mm);②将铝合金板切成细条(尺寸为20mm*116mm);③折弯,注意左右高度相等;④打定位孔(使用1mm钻头),注意孔的位置以U型架的“U”字底为基准;⑤打螺丝孔(使用3mm钻头);⑥磨削加工。
4、自制脚底板:脚底板的设计可以多种多样,但要保证一点,即机器人抬脚走路时,要保证重心用你设计的脚底板可以承受得住。
5、自制机器人腰部:其实就是连接两条腿的部件,长宽是根据设计的脚底板的大小确定的。
二、需要注意的问题:1、机器人左右质量要保证尽量一致,否则走路会有偏差。
2、制作部件时,要注意基准。
三、软件编程:软件编程,主要是靠控制舵机旋转不同的角度。
基于ArduinoUNO和L298N的避障小车DIY制作

基于ArduinoUNO和L298N的避障小车DIY制作一、壁障小车的制作1、制作避障小车的准备工作硬件:Arduino UNO、L298N驱动模块、超声波模块、小车底盘、舵机模块、一块面包板、一些杜邦线。
软件: Arduino UNO的程序下载软件下面来一张安装好的的图2、舵机模块的解析认识本次用的是简单实用的9克小舵机。
它的扭力不是很大,但是对于咱们想用作扫描超声测距探头来说足够了。
一般舵机的旋转角度范围都是0-180度旋转的,也有一种数字电机可以在电机和舵机这两种状态下切换,既可以控制精确的旋转角度也可以连续旋转作为电机使用。
舵机转动的角度是由控制器的脉冲宽度决定的,假如舵机处在中间位置(90度),这时的脉冲宽度设定为1.5ms那么我们想让舵机转动到0度的时候可以给他1ms的脉冲,如果想让它转动到180度的时候可以给2ms的脉冲,这就是舵机角度控制的基本原理了。
3、超声波模块的解析认识本次用的超声波模块如图所示模块工作原理:1、采用IO触发测距,给至少10us的高电平信号;2、模块自动发送8个40KHz的方波,自动检测是否有信号返回;3、有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.测试距离=(高电平时间*声速(340m/s))/2;4、L298N模块的解析认识本次用的L298N模块如图所示1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围(IN1 IN2 IN3 IN4):低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围(ENA ENB):低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:58mm*40mm12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
舵机在仿生机器人中的应用
舵机在仿生机器人中的应用摘要:根据控制方式,舵机应该称为微型伺服电机。
早期在模型上使用最多,主要用于控制模型的舵面,所以俗称舵机。
舵机接受一个简单的控制指令就可以自动转动到一个比较精确的角度,所以非常适合在关节型机器人产品使用。
仿人型机器人就是舵机运用的最高境界。
舵机的结构、类型及控制原理等知识,是机械专业学生需要掌握的基本知识,了解舵机在机器人中的应用,对我们下学期科技创新活动制作仿生机器人有着重要作用。
关键词:舵机的结构、类型、工作及控制原理、应用。
一、舵机的结构及工作原理。
舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的外壳里的伺服单元。
能够利用简单的输入信号比较精确的转动给定角度的电机系统。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。
结构:舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文servo。
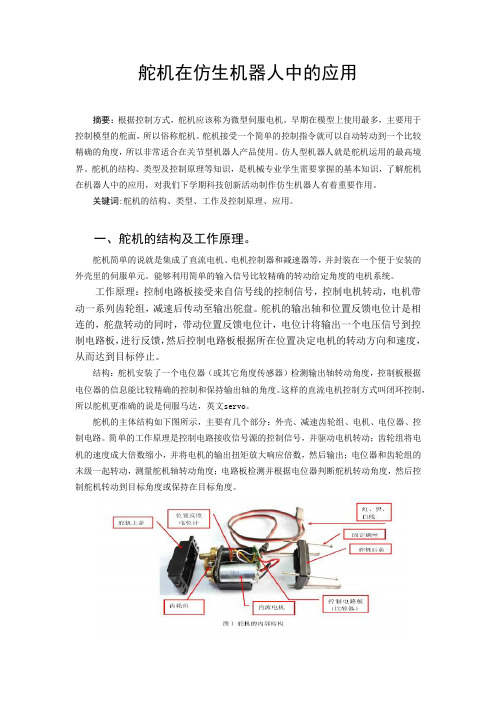
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控制电路。
简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控制舵机转动到目标角度或保持在目标角度。
舵机的外壳一般是塑料的,特殊的舵机可能会有金属铝合金外壳。
金属外壳能够提供更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。
林锋教你一步一步玩机器人(arduino)--制作篇(入门组件A)

林锋教你一步一步玩机器人(arduino)系列------制作篇 (入门组件上)----- 张林锋/文2012-5-28目录1 前言 (3)2. 准备工作 (3)2.1 元器件准备工作 (3)2.2 实验板子准备 (4)3 LED 实验 (5)4 蜂鸣器实验 (7)5.按键实验 (9)6 8*8点阵实验 (11)7 串口实验 (12)8 模拟量输入(电压输入) (16)9 直流电机控制(L298N驱动模块) (18)10 PMW 脉冲宽度调试 (21)11 控制舵机 (22)12 超声波模块 (23)13 巡线防跌模块 (26)14 红外遥控 (27)说明写这系列文章主要目的是和读者一同分享下自己的学习过程,也希望能给读者带来一些帮助,文章部分内容剪裁网络文章,部分自己撰写。
文章内容用于爱好者之间学习,不得用于商业目的。
当然笔者才疏学浅,所书内容难免有缺点和漏洞,还请读者多多海涵,希望能和广大电子爱好者交流心得。
本人QQ:65198204邮箱:65198024@博客:/u/27758246901 前言在淘宝买的Arduino 主板套件终于在26号到了,物流也太慢了,发了4天才到。
套件包含:4轮小车,Arduino MEGA 2560 主板,配套的MEGA Sensor Shield V2.0扩展板,超声波模块,红外遥控模块,寻线防跌模块,舵机。
套件是在27°寒语电子工作室(/)买的,也就是科易互动科技的子站(/)。
备注一下:套件性价比很高,也有配套的相关资料,不过个人觉得配套资料写的不够详细和全面,对于新手制作会带来很多不便。
在制作篇系列文章中,我会对入门组件的应用,以及4轮小车套件的制作,做出详细的制作流程,图文并茂。
相信会对新手入门带来一定收获。
读者在做本文章实验时可以结合阅读我的相关入门知识文章,基本篇,硬件篇,软件篇。
制作篇分:入门上篇:主要介绍一些基础配件,以及小车所要用的器件。
手把手教你做四足步行机器人

手把手教你做四足步行机器人用两个飞机模型舵机就能DIY个四足机器人!简单易做.你可试试.来源:机器人天空原创时间:2008-05-19第一步:准备零件和所需的材料制作一个四腿的行走机器人非常简单,所需零件也非常少,两个电机,机器人的腿(用直径合适的铁丝弯制),电池,底板(我用的是一种非常酷的塑胶材料,当它被在热水中加热时就会变软,冷却后又会回复硬度),用来将电池和电机固定在底板上的螺钉,一小块电路实验版(可以在电子市场买到),一个用来安放 ATMega的28针芯片插座,胶,烙铁和焊锡,以及刀子。
装配之前我还画了一张草图,在上面标出了需要打孔和切割的位置,有一张草图可以让你少走很多弯路,所以我建议大家在对手之前都要做一番“纸上谈兵”的工作。
第二步:现在需要用刀子在机器人的底板上划出两个安放电机的洞,我先按照草图划出一个洞后用切下来的那部分做标尺直接在另一边划另外一个洞。
切的时候不要忘了在下面垫一块纸板,我差一点切了我的咖啡桌。
打好两个洞后试一试电机,我划的洞似乎稍微宽了一点,长度倒是刚好。
第三步:弯曲底板,安装电机很不幸,本人手劲不足,无法直接把底板弯曲成照片中的角度,只好采用技术含量比较高的办法:首先烧一壶开水然后将底板放入水中一到二分钟,主要要用一个东西按住底板,免得它浮上来(不要用手!)。
拿出来后底板应该软一些了,戴着手套将它弯曲到自己想要的角度直到冷却。
根据网上高手的建议,最佳角度为30度。
钻上两个螺纹孔,然后用螺钉将电机固定在底板上。
第四步:固定腿部到伺服电机的十字臂我用尖嘴钳截了两段粗铜线作为机器人的前腿和后腿,然后把它们弯曲成适合伺服电机的十字臂的形状。
一条经典的BEAM准则就是需要连接零件时,如果可能的话尽量采用铁丝来捆绑。
用铁丝捆绑要优于采用焊锡连接。
用铁丝捆绑的话会给零件一定的自由空间,并且也利于零部件的再次使用。
第五步:关键的一步:将固定好腿部零件的十字臂装在伺服电机上将绑上了腿部的十字臂固定到伺服电机上,然后用钳子小心地把机器人的前后腿一点点折到图中所示位置。
教你做机器人

教你做机器人大标题:教你做机器人一、介绍机器人一直是人们津津乐道的话题,它们有着广泛的应用领域,如工业生产、医疗辅助和日常家居。
在本文中,我将教你如何制作一个功能全面、操作简单的机器人。
二、准备材料在开始之前,我们需要准备以下材料:1. Arduino板:作为机器人的核心,它提供了控制机器人各个部分的接口。
2. 舵机:用于控制机器人的运动,如转动头部和四肢。
3. 红外传感器:用于检测前方的障碍物,以便机器人能够避开障碍。
4. 超声波传感器:用于检测机器人周围的距离和物体。
5. 电池供电:为机器人提供电源。
三、机器人装配1. 连接舵机:将舵机连接到Arduino板的对应接口,确保舵机能够自由转动。
2. 连接传感器:将红外传感器和超声波传感器连接到Arduino板的对应接口。
3. 连接电池:将电池连接到Arduino板上的电源接口,确保机器人能够正常工作。
四、编程1. 安装Arduino IDE:从官方网站下载并安装Arduino IDE,这将用于编写控制机器人的代码。
2. 编写代码:打开Arduino IDE,编写代码以控制机器人的动作和反应。
你可以根据自己的需求,编写机器人跟随线路、避开障碍物或执行其他功能的代码。
3. 上传代码:将编写好的代码上传到Arduino板,通过USB连接线将Arduino板连接到电脑上,点击上传按钮将代码上传至Arduino板上。
五、调试和测试1. 运行机器人:将机器人放置在平坦的地面上,打开电源,观察机器人是否按照代码的指令进行动作。
2. 调试代码:如果机器人的运行不符合预期,你可以通过检查代码,确认传感器和舵机的连接是否正确,以及代码是否编写正确等。
3. 测试功能:验证机器人是否能够正常地避开障碍物、跟随线路等功能。
你可以在不同的环境下测试机器人的性能,如在室内和室外环境中测试距离传感器的准确性。
六、进一步探索完成以上步骤后,你已经制作了一个基础的机器人。
如果你对机器人的功能还不满意,你可以进一步学习和探索以下内容:1. 学习更多的传感器:如温度传感器、光线传感器等,它们将为你的机器人增加更多的功能。
机器人实验实验报告
成绩中国农业大学课程论文(2013-2014学年秋季学期)论文题目:机器人创新实验(1)实验报告课程名称:机器人创新实验(1)任课教师:班级:姓名:学号:机器人创新实验(1)实验报告关键字:ARM TKStudio集成化编程 C语言传感器舵机控制摘要:机器人创新实验课引导我们综合利用机械扩展、电子扩展、软件扩展及传感器扩展能力,以创新为主题,自主完成从机器人的机构组装到编程控制。
通过这门课程,我初步掌握了有关机器人技术的基本知识和机器人学所涉及的技术的基本原理和方法,加深了对理论知识的理解和掌握。
一、认知实验:了解探索者机器人实验一这门课用到的教学材料是探索者教学机器人创新套件。
通过这个实验平台,我们可以完成机器人的创新设计、组装以及编程控制。
在前期的认知实验中,我们搭建了一个二轮驱动的自动避障小车,并且实现了对它的控制,从而对探索者有了很好的了解。
(一)机械部分探索者的机械零件包括金属件、塑胶件、舵机、零配件四部分。
其中金属件共有29种,具有相同的壁厚和丰富的扩展孔。
舵机分为圆周舵机和标准舵机两种。
同学们在创新设计的过程中可以根据零件的特点,灵活运用,合理搭配,从而实现自己所设计的机械结构以及运动方式。
(二)控制部分我们使用的Robotway ARM7 LPC2138 主控板采用32位高性能实时嵌入式芯片,支持用户自定义开发,开放电路图、源代码、库函数。
探索者套件中包含了触碰传感器、触须传感器、近红外传感器、声控传感器等八种传感器,可以实现寻线、避障、声光等多种控制。
(三)编写和烧录程序我们使用的编译环境是TKStudio。
由于我们并没有学习过单片机,所以编程对我们来说是一个难点。
我们先从实验指导书上简单的例程开始学习,结合C 语言的知识,逐渐掌握了ARM的编程方法。
烧写程序的时候,我们用到的是Philips Flash Utility软件。
使用的过程是:1、选择端口;2、读取主控板的ID号;3、擦除主控板中原有的程序;4、选择自己的程序;5、上传。
舵机在机器人技术中的应用及编程方法

. 5 ) , 2 。可以用单片机作 为舵机 的控制单元 , 使P WM信号 院教师 , 高级工程 师、 维 修 电工 技 师 , 主 要 从 事 电气 自 0 动 化 技术 专 业 教 学 与 研 究 工作 。 的 脉 冲宽 度 实 现 微 秒 级 的 变 化 ,从 而 提 高 舵 机 的 转 角 精
(  ̄ ) 2 0 1 3 . 6 ~ 2 0 1 3 . 7 , 智 能节 能 可以 方便实现远程监控 。④结合 高速发展 的计 算机 技术、 能控 制技术 以及软起动 方案 ; 人 工 神 经 网 络 技 术 等 ,实 现 异 步 电动 机 的 高 级 智 能 控 制 。 控制器 的构 建 : 包括 设计 和搭建整个控制 系统 :  ̄2 o 1 3 . 8 ~ 0 1 3 . 9 , 现场安 装 以及 工业性试 验 , 对前期 算法进 行最 终 ⑤ 本 项 目所设计 的智能节能控制 装置 实现 了 电机 的软 起 2 进一步积累经验 ; @2 0 1 3 . 1 0 ~ 2 0 1 3 . 1 1 , 电路及程序调 动与软刹车、 过载保护、 缺相 以 及 三相 不平 衡 保 护 , 通 过 在 确定 ,
摘要 : 本文 以 自 动投球机 器人为例 , 介绍 了采用宏 晶 S T C 1 2 C 5 A 6 0 S 2 单 片机控制舵机 的原理和编程 方法。
Ab s t r a c t :B a s e d o n a u t o ma t i c p i t c h i n g r o b o t a s a n e x a mp l e ,t h i s p a p e r i n t r o d u c e s t h e p in r c i p l e a n d p r o g r a mmi n g me t h o d o f u s i n g S T C1 2 C5 A6 0 S 2 MC U t o c o n t r o l s t e e i r n g g e a r .
基于舵机的机器人控制系统的设计与调试毕业论文
2.2 ATmega32控制器
ATmega32单片机是一个高性能、功耗低的AVR微处理器。ATmega32单片机共有4个端口,分别为PA、PB、PC、PD口。每一个端口拥有8个I/O接口。ATmega32微处理器含有3个定时和3个计数器,其中有1个16位的定时器和计数器和2个8位的定时器和计数器。还含有一个UART串口和8个10位的ADC模数转换。其余还有一些电源和地的接口等。ATmega32的外设非常丰富。ATmega32的微处理器有两种,一种是40脚的,另外一种是44脚的,原理图如图1和图2所示:
基于舵机的机器人控制系统的设计与调试毕业论文
第1章 绪 论
1.1 六足机器人的发展和意义
社会的发展伴随着科技的发展,现代化的各个行业中,机器人越来越受到人类的喜爱,同时对机器人的要求也在不断的提高。如今,机器人应用范围扩展广泛,在一些比较复杂和特殊的工作条件中,人们对机器人的功能和方式等,也提出特殊的要求,无论在任何复杂的环境下工作的机器人,也要完成特定任务。
本次在应用SolidWorks建模时,六足机器人的足部拐角比较难画,通过反复的咨询和修改才完成建模。
2.5 Altium Designer 电路设计软件
本次的设计也将USB接口技术融入到接口设计中。我们采用ATMEL公司的AVR系列单片机ATmega32通用USB的接口模块。这样的设计模块可以使各种嵌入式的微处理器添加USB接口,方便系统与主机的快速通信。
AVR单片机是现如今新的一代高速精简指令系统计算机微控较低等特点[4]。AVR单片机的I/O口线的驱动能力比较强,它片内的集成外设的资源是非常丰富的。AVR单片机的ISP下载,具有制作相对简单、成本相对低廉等特点。
利用舵机搭建机械臂的方法

利用舵机搭建机械臂的方法如下:
1.确定机械手臂的关节数量和自由度。
一般来说,类人机械手臂
至少需要有6个自由度的关节,这样才能实现基本的抓取动作。
2.为每个关节选择合适的微型舵机。
需要根据关节的扭矩需求和
转动角度范围来选型。
舵机的工作电压也需要考虑。
3.使用机械结构将舵机连接起来。
可以使用轴承、连接杆等机械
部件将舵机的输出轴固定在一起。
4.设计指尖的机械结构。
指尖需要能够开合,一般也需要增加触
觉传感器。
5.确定电路连接。
一般使用Arduino UNO R3作为主板,扩展板和
按键板都是自己焊接的。
按键板上面0~7对应的是Arduino的
0~7引脚。
机械臂组件可以在某宝上购买,搜索关键词:机械手
臂木制拼接。
6.编写程序。
使用Servo这个支持库,用它产生舵机需要的PWM
脉冲。
arduino仿生六足机器人教材

仿生六足机器人教材———基于Arduino开发平台V1.0目录一、机器人的组装 (1)1.1. 组装工具 (1)1.2. 装配步骤 (1)二、系统概述 (10)2.1.arduino介绍 (10)2.2.Arduino驱动安装 (13)2.3.Arduino IDE菜单介绍 (20)三、实验操作 (25)3.1 红外避障实验 (25)3.2 舵机实验 (27)四、使用说明 (31)4.1.接线端口介绍 (31)4.2.操作说明 (32)一、机器人的组装1.1. 组装工具工具:尖嘴钳、十字螺丝刀等。
1.2. 装配步骤1)首先是准备好机体2)在机体上装配4个M3X15mm的六棱铜柱,所用到4个M3X8mm的螺钉如下图所示:我这里为了方便能够清楚看到螺钉与铜柱的连接把它分开了。
4)下一步就是装两个模拟舵机和付板,所用到八个螺钉,八个螺母如下图所示1是分解装配6)这一步是两个十字舵盘的安装,这里用到两个M3X6mm的螺丝8)组装M3X20mm、M3X25mm的六棱铜柱,这里中间部位是两个M3X20mm六棱铜柱,两侧是M3X25mm的六棱铜柱,用到M3X8mm 的螺丝10)中间脚的组装,M3X20螺丝、M3螺母、钢纸垫片11)组装连接杆12)另一个连杆组装13)两侧脚组装,这里用到M3X8螺丝、M3螺母、钢纸垫片14)固定完成15)中间脚上部螺丝的固定,这里用到M3X8螺丝、钢纸垫片二、系统概述2.1.arduino介绍要了解arduino就先要了解什么是单片机,arduino平台的基础就是A VR指令集的单片机。
1、什么是单片机?它与个人计算机有什么不同?一台能够工作的计算机要有这样几个部份构成:中央处理单元CPU(进行运算、控制)、随机存储器RAM(数据存储)、存储器ROM(程序存储)、输入/输出设备I/O(串行口、并行输出口等)。
在个人计算机(PC)上这些部份被分成若干块芯片,安装在一个被称之为主板的印刷线路板上。
六足步行机器人
主控制板在设计之初,就将通用性作为一个重要的目标考虑。六足机器人的主控板不仅可以提供六足的电机控制,还可以成为四足机器人、五自由度机械手的控制主板。MSP430F149定时器的八个PWM输出对于六足机器人来说没有用处,但是对于使用PPM控制口较少的四足机器人(需要八个)和五自由度机械手(需要五个)来说可以直接利用定时器的这种功能,简化编程工作。
图1.1 电机命名分类
之所以给电机命名分类,主要是方便写行走步骤,详细内容请参考第三章。
调整电机的方法是:先卸掉腿电机轴心固定螺钉(见图1.2),然后用十字安装架调整电机轴心角度(见图1.3),可利用直角尺、铅笔等工具保证精度。最后取掉十字安装架、固定好图2.2 中所示螺钉。
臂电机和脚电机的安装误差建议由软件来修正。
关键词:舵机 msp430单片机 行走算法 超声波传感器
Abstract
Six feet robot is based on special roboticconfigurationincluding 18 servo-electro motors.My task is driving it to move, forImust first design thePCB,weld the PCB when it comes back,connectwires to the PCB andprogramme.The robot at last moves smoothly, glidingly, in each directionIwant it to, of its six.Before programming,arithmeticof eight-step is used to push the robot to go forward in one fixed direction.To make it generalization,Iconclude the very arithmetic by which movements of every servo-electromotor can be computed if the number of the direction servo-electromotor is given.The next task is that the robot can move in the direction which is judged as the best one after checking theenvironmentbyultrasonic.Having a pair of eyes, the robot can see where the block is and where it can march over.The main controlling board is all right but it can be better if more steady and reliable, and if more functional parts is added as keyboards and the interface with Boot Strap Loader.Itdeserves to do further research at the moving measure-control plat of six feet robot on the use of sensors as ultrasonic,compassmodules.It is useful to develop the technologies of image management and remote info-transmission at the plat, too.Themeasure-control plat of six feet robot is widely used in measuringweather, doing special tasks, and as anassistantin house.
第3单元 第2课《避障机器人-感知障碍与行动规划》教案-【清华大学版2024】《信息科技》五上
第3.2课《避障机器人—感知障碍与行动规划》板书课题。
1.想要深入认识机器人,可以从开源机器人入手,了解相关的过程与控制原理,还可以自己尝试实现部分功能,比如我们常见的大部分机器人能够感知周围的障碍物,及时调整行进路径,避开障碍物,像这样的避障机器人应用了什么样的原理?制作这样的机器人原型需要什么样的工具和方法?这节课我们一起探索一下吧!思考:同学们,假设让你们制作一个简易机器人,你们会如何设计?会使用什么技术来实现呢?如果让我制作一个简易机器人,我会从以下几个方面进行设计:外观设计:可以选择一个简洁的几何形状,如圆形、方形或人形,以便于制作课堂活动大家想要实现一个具备怎样功能的机器人呢?请分析你想要设计的机器人的功能。
●学习助手功能:回答各种问题并能够快速准确地回答主人的问题,包括历史、科学、文化等方面的知识。
可以通过连接互联网获取最新的信息。
●健康管理功能:健康检测及运动检测、健康提醒紧急救援等。
●家庭助手功能:扫地和拖地能够自动清洁地面,识别不同的地面材质并调整清洁方式,紧急救援在紧急情况下,能够拨打急救电话或联系家人。
●社交互动功能:陪伴主人参加社交活动,如聚会、旅行等。
二、知识准备机器人的工作过程(见图 3.2.2)一般是通过感知系统(输入)获取外部信息,然后将这些信息发送给控制系统(控制)进行处理,控制系统通过运算后给出处理方案,将方案结果发送给执行系统(输出)执行相应的操作,如机器人行走。
机器人常用传感器机器人的感知系统通常是各种传感器,这些传感器就相当于机器人的眼、耳、口、鼻。
根据功能的不同进行分类,常见的机器人传感器如表3.2.1所示。
传感器类别传感器名称图片视觉摄像头或视觉传感器超声波传感器的工作原理(见图3.2.4)是从发射探头发射超声波,超声波会在空气中传播,当遇到障碍物时会将超声波反弹回来,根据发射和接收的时间差及声波的传输速度,从而计算出超声波与障碍物之间的距离。
机器人行走通常情况下,机器人行走有前进、后退、左转、右转和停止等情况。
简易机械手

简易机械手1. 引言机械手是一种能够模拟人工手臂动作的机器人设备。
它可以在工业生产中自动完成各种复杂的操作任务,如装配、搬运和焊接等。
然而,传统的机械手通常较为庞大、复杂和昂贵,不方便小型工业企业或个人使用。
因此,本文将介绍一种简易机械手设计,并提供详细的制作步骤和所需材料,以便读者能够自己制作一个简易机械手。
2. 材料准备为了制作一个简易机械手,我们需要准备以下材料:•3个舵机•Arduino 控制板•连杆(可以使用木棒或金属杆)•3D打印件(用于连接舵机和连杆)•电源线和电池3. 制作步骤3.1 3D打印件制作首先,我们需要制作一些3D打印件,用于连接舵机和连杆。
你可以使用任何3D建模软件(如Tinkercad、Fusion 360等)来设计并导出这些打印件。
3.2 连杆和舵机安装接下来,我们需要将连杆和舵机安装在打印件上。
使用螺丝将舵机固定在打印件上,然后将连杆连接到舵机轴上。
确保舵机和连杆之间的连接牢固而且灵活。
3.3 连接舵机和Arduino将舵机的控制线连接到Arduino控制板上。
你可以使用面包板或直接焊接线缆来连接它们。
确保正确连接舵机的控制线到Arduino的引脚,并根据需要编写相应的控制代码。
3.4 电源连接最后,在机械手上连接电源线和电池。
确保电源充足,并注意正确连接正负极。
4. 使用完成以上制作步骤后,我们就可以开始使用这个简易机械手了。
通过控制Arduino控制板上的程序,可以使机械手执行不同的动作和动作序列。
例如,我们可以编写一个程序,让机械手按照设定的顺序抓取和放置物体。
5. 总结本文介绍了一种制作简易机械手的方法,并提供了详细的制作步骤和所需材料。
这个简易机械手可以用于小型工业企业或个人进行一些简单的操作任务。
希望读者通过本文的指导,能够成功制作一个自己的简易机械手。
如果有任何问题,请随时与我们联系。
无线遥控的六足机器人的制作

·研究探讨·251无线遥控的六足机器人的制作杭州职业技术学院 信息工程学院 彭 斐 王坚慧【摘要】基于仿生原理,制作可无线遥控的六足机器人,采用32路舵机控制板、高扭矩舵机MG995实现了关节运动控制;采用PS2无线手柄实现对机器人的无线遥控。
实验表明,该六足机器人能在无线遥控下实现直线行走或定点转弯运动,且动作具有较好的协同性。
【关键词】六足机器人 舵机 无线遥控多足机器人是借鉴昆虫的肢体结构与运动规律而设计,相比传统的轮式、履带式机器人,它具有跨越较大障碍、行走平稳、复杂地形条件下行进速度快且能耗低等运动特性[1]。
因此,它对非结构环境的适应性更强,可替代人类完成很多危险的作业,应用前景广泛。
1 控制方案 1.1机械结构 本文设计的六足机器人躯干纵向长214mm,宽200mm,站立时高110mm,样机是以身体纵向中心线为对称的近似八边形外形,六条腿均匀分布身体两侧,每条腿都有三个关节,共有18个关节,所有关节依靠伺服舵机驱动,由18个舵机实现六足机器人的运动。
机器人每条腿有三个自由度,前两个自由度的转动轴线相互垂直,后两个自由度的转动轴线相互平行,分别由三个独立的舵机驱动。
后两个自由度采用四连杆方式传动。
为增加支撑的稳定性,六个足端呈椭圆形分布。
对于每条腿,按照由躯干到足端的顺序包括了三个自由度的传动方式。
1.2 步态规划 采用三角步态方式实现六足机器人行走,向前运动时,左中足、右前足、右后足为一组足保持支撑地面,右中足、左前足、左后足为二组足抬起向前迈步,然后变为二组支撑地面,一组足做迈步动作,如此循环交替实现向前运动。
转弯运动有两种方式,一种为自转,一种为公转。
自转为一组足保持支撑地面,二组足抬起向一个方向旋转一定角度后落下支撑地面,然后抬起一组足同方向旋转,如此交替实现自转。
公转方式与前进方式大体相同,只是左右两侧足迈步的距离不同[2]。
2. 电气控制系统电气控制系统包括舵机及其驱动电路、无线遥控电路、供电电路等部分。
六足仿生机器人研究报告

六足仿生机器人研究报告摘要:多足仿生机器人拥有的出色的地形适应能力使其在特种机器人领域闪耀夺目,成为近年来机器人领域的一颗无法忽视的新星。
本课题所研制六足仿生机器人由18个舵机组成6条腿,每条腿有1个水平旋转及2个垂直升降共3个自由度。
该六足仿生机器人由ATmega16单片机精确控制到每个舵机,可实现机器人模仿昆虫三三足行走。
本文将从六足仿生机器人的设计、六足仿生机器人的功能实现、六足仿生机器人的功能扩展三大方面展示研究成果。
关键词:六足仿生机器人;昆虫行走;地形适应能力;跨障一、六足仿生机器人的设计六足仿生机器人集仿生学原理、机构学理论、计算机软件开发技术、自动控制原理与技术、传感器检测技术和电机驱动技术于一体。
对于传统的行动结构,其优势在于其具有的优越的跨障碍能力,以及在复杂地形条件下的地形适应能力。
本课题基于六足仿生机器人的行走方式、行动机构结构设计、伺服器的驱动进行研究。
1.仿生学原理分析该六足仿生机器人基于模仿昆虫的运动原理设计而成,故本课题首先对昆虫如何运动进行了研究。
昆虫有3对共6条足,分别分布于前、中、后胸,由所处位置相应被称为前足、中足、后足,每条足可分为六节,由基部向末端依次为基节、转节、腿节、胫节、跗节和前跗节。
昆虫的足的主要自由度可视为3个,分别由转节、胫节、跗节完成,实现足的自由活动。
昆虫行走时每次以三条足为一组,两组足交替运动。
在昆虫的实际运动过程中,昆虫前进、后退、转向时其足皆按此方法三三足行走,只是由每条足移动的位置不同而实现不同的动作。
2.六足仿生机器人运动学分析(1)三角步态行走法昆虫运动时,它的三对足分为两组交替运动,每三足构成一个三角形支架结构,这便是三角步态行走法。
在六足仿生机器人的实际运动中,其步态多种多样,而三角步态行走法为六足仿生机器人实现行走的典型步态。
(2)六足仿生机器人的行走分析①昆虫的足主要有3个自由度,因此在机器人的每条足上我们安装了3个可实现角度精确控制的舵机来实现3个自由度,其中1个水平旋转自由度、2个垂直升降自由度。
小型智能机器人制作全攻略

小型智能机器人制作全攻略简介小型智能机器人是近年来备受关注的领域,它能够实现人机互动、自主导航、语音识别等功能,成为了现代科技的新宠儿。
本文将介绍如何制作一台小型智能机器人,供爱好者参考和实践。
所需材料在开始制作小型智能机器人之前,请确保准备了以下材料:1.Arduino主控板2.舵机3.超声波传感器4.电池5.杜邦线6.面包板7.轮子和底盘8.蓝牙模块(可选)步骤1. 硬件组装第一步是组装硬件部分。
按照以下步骤进行操作:1.将Arduino主控板固定在面包板上,确保稳固。
2.连接舵机和轮子,将它们装在底盘上,使机器人能够运动。
3.连接超声波传感器,并将其放置在机器人的前方,用于测量距离。
4.将电池连接到Arduino主控板,以供机器人供电。
5.如果需要,连接蓝牙模块,以便通过手机或电脑控制机器人。
2. 编程完成硬件组装后,开始编写机器人的控制程序。
使用Arduino IDE或其他集成开发环境进行编程:#include <Servo.h>Servo motor;void setup() {motor.attach(9);//连接舵机到引脚9//进行其他设置}void loop() {//在这里实现机器人的行为逻辑}以上是一个基本的Arduino程序框架,你可以根据需要添加更多功能。
例如,你可以使用超声波传感器来测量距离,根据不同的距离来控制机器人的移动方向;也可以使用蓝牙模块实现手机遥控机器人等。
3. 调试和优化编写完控制程序后,将程序上传到Arduino主控板,连接电池并启动机器人。
在使用过程中,你可能会遇到一些问题,如机器人行走不稳定、超声波测距不准确等。
这时需要进行调试和优化,具体方法有:•检查硬件连接是否正确,确保电路没有松动或短路。
•确保舵机的角度调整正确,以便控制机器人的转向。
•校准超声波传感器,确保测量距离的准确性。
•逐步调整程序中的参数和算法,以改进机器人的性能。
4. 扩展功能一旦你完成了基本的小型智能机器人制作,你可以继续扩展它的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科学年论文简易人形机器人的设计院系电子信息工程学院自动化系专业名称自动化年级2008级学生姓名魏杰学号00824031指导教师仲兆楠2011年09月20日基于单片机的人形机器人的设计与实现摘要本文介绍的人形机器人采用新华龙公司的C8051F310单片机为控制核心,利用舵机完成人形机器人的各种动作。
该人形机器人可以完成下蹲、起立、走步,侧移和踢球等动作。
舵机均采用单片机C8051F310内部的PCA模块产生的PWM 波调节其转向和转角的大小从而实现人形机器人的各种动作。
关键字:C8051F310 舵机PCA模块PWMDesign and Realization Humanoid RobotBased on MCUAbstractHumanoid Robot that is described in this article is using Nc Dragon single-chip microcomputer as control core,using rudder to complete various action。
The Humanoid Robot can complete the squatting , standing up , walking , lateral moving and kicking actions. Rudder is controlled by PWM waves produced by C8051F310 MCU internal PCA module . Those actions is achieved through adjusting steering and rudder angle .Keywords:C8051F310 Rudder PCA module PWM概述本项目是基于51单片机的人形机器人的设计,整个程序采用C语言。
近年来机器人就有很大的发展潜力,随着科技的进步,机器人将会做的越来越完善。
人形机器人的产生解决的许多生产中的难题,它可以代替人类做许多危险而又高难度的工作。
在一些场合机器人已经可以代替人类,相信在今后的时间里,人形机器人将会为我带来许多帮助。
原理图的设计一、单片机外围电路本单片机的晶振为32.768MHZ,但是在后期的测试发现外部晶振输出不稳定,因此本项目采用的是内部晶振。
我们所设计的机器人总共有12个舵机,而这款F310最多只能输出5路PWM,因此需要3块板子。
二、电源驱动电路电源芯片采用AZ1084和LM1117。
其中AZ1084输入电压为7.2v,输出电压为5v,LM1117输入电压为5v,输出电压为3.3v。
F310单片机的工作电压是3.3v,因此需要经过两次降压达到3.3v。
为了稳定工作电压,采用IB0505LS来稳定单片机的工作电压。
三、通信接口我们需要3块电路板来是机器人工作,因此通信是必须考虑的问题。
在此我们采用485来实现单片机之间的通信,通过一块主板来控制其余两块副板子的工作。
485的好处就是它不像232那样要考虑电平匹配的问题。
四、舵机接口采用光电隔离来稳定输出,是舵机正常稳定的工作。
机器人有两条腿,每条腿由6路舵机来控制。
PCB图制作一、普通前二、普通后(顶层)三、普通后(底层)元器件列表源程序左腿初始化:#include "c8051f310.h"#define uchar unsigned char#define uint unsigned intsbit P2_7 = P2 ^ 7;#define walk_zuo_1 186#define walk_zuo_2 187#define walk_zuo_3 188#define walk_zuo_4 189#define walk_zuo_5 190#define walk_mark 222uchar mark;uchar act,arc;void Init_Variables(){act=0;arc=0;}void PCA_Init(){PCA0CN = 0x40;PCA0MD &= ~0x40;PCA0MD = 0x02;PCA0CPM0 = 0xC2;PCA0CPM1 = 0xC2;PCA0CPM2 = 0xC2;PCA0CPM3 = 0xC2;PCA0CPM4 = 0xC2;PCA0CPL0 = (uchar)((uint)(31*141.6+58000)%256);PCA0CPH0 = (uchar)((31*141.6+58000)/256);PCA0CPL1 = (uchar)((uint)(31*45.3+58000)%256);PCA0CPH1 = (uchar)((31*45.3+58000)/256);PCA0CPL2 = (uchar)((uint)(31*90.8+58000)%256);PCA0CPH2 = (uchar)((31*90.8+58000)/256);PCA0CPL3 = (uchar)((uint)(31*49.7+58000)%256);PCA0CPH3 = (uchar)((31*49.7+58000)/256);PCA0CPL4 = (uchar)((uint)(31*147.9+58000)%256);PCA0CPH4 = (uchar)((31*147.9+58000)/256);void Port_IO_Init(){P0MDOUT = 0xC3;P1MDOUT = 0x01;P2MDOUT = 0x80;P0SKIP = 0x0C;P1SKIP = 0x06;XBR0 = 0x01;XBR1 = 0x45;P2_7 = 0;}void Oscillator_Init(){OSCICN = 0x82;}void Timer_Init(){TCON = 0x40;TMOD = 0x20;CKCON = 0x01;TL1 = 0x61;TH1 = 0x61;}void UART_Init(){SCON0 = 0x10;}void Interrupts_Init(){IE = 0x90;}void Delay(uint dly){uint i,j;for(i=0;i<dly;i++)for(j=0;j<1000;j++); }// Initialization function for device,// Call Init_Device() from your main program void Init_Device(void){Init_Variables();PCA_Init();Port_IO_Init();Oscillator_Init();Timer_Init();// Delay(5);UART_Init();Interrupts_Init();}void zuo_1_duoji(uchar x){PCA0CPL0 = (uchar)((uint)(31*x+58000)%256);PCA0CPH0 = (uchar)((31*x+58000)/256);}void zuo_2_duoji(uchar x){PCA0CPL1 = (uchar)((uint)(31*x+58000)%256);PCA0CPH1 = (uchar)((31*x+58000)/256);}void zuo_3_duoji(uchar x){PCA0CPL2 = (uchar)((uint)(31*x+58000)%256);PCA0CPH2 = (uchar)((31*x+58000)/256);}void zuo_4_duoji(uchar x){PCA0CPL3 = (uchar)((uint)(31*x+58000)%256);PCA0CPH3 = (uchar)((31*x+58000)/256);}void zuo_5_duoji(uchar x){PCA0CPL4 = (uchar)((uint)(31*x+58000)%256);PCA0CPH4 = (uchar)((31*x+58000)/256);}void walk(){switch(act){case walk_zuo_1 :zuo_1_duoji(arc);break;case walk_zuo_5 :zuo_5_duoji(arc);break;case walk_zuo_2 :zuo_2_duoji(arc);break;case walk_zuo_3 :zuo_3_duoji(arc);break;case walk_zuo_4 :zuo_4_duoji(arc);break;default :break;}}void main(){Init_Device();while(1);}void UART_Interrupt(void) interrupt 4 {uchar dat,i;// uchar mark;if(RI0==1){for(i=0;i<2;i++){while(!RI0);dat=SBUF0;if(dat>180)act=dat;elsearc=dat;RI0=0;}walk();}}右腿初始化:#include "c8051f310.h"#define uchar unsigned char#define uint unsigned intsbit P2_7 = P2 ^ 7;#define walk_you_1 181#define walk_you_2 182#define walk_you_3 183#define walk_you_4 184#define walk_you_5 185#define walk_mark 223uchar mark;uchar act,arc;void Init_Variables(){act=0;arc=0;}void PCA_Init(){PCA0CN = 0x40;PCA0MD &= ~0x40;PCA0MD = 0x02;PCA0CPM0 = 0xC2;PCA0CPM1 = 0xC2;PCA0CPM2 = 0xC2;PCA0CPM3 = 0xC2;PCA0CPM4 = 0xC2;PCA0CPL0 = (uchar)((uint)(31*20+58000)%256);PCA0CPH0 = (uchar)((31*20+58000)/256);PCA0CPL1 = (uchar)((uint)(31*64.5+58000)%256);PCA0CPH1 = (uchar)((31*64.5+58000)/256);PCA0CPL2 = (uchar)((uint)(31*92.8+58000)%256);PCA0CPH2 = (uchar)((31*92.8+58000)/256);PCA0CPL3 = (uchar)((uint)(31*136.2+58000)%256);PCA0CPH3 = (uchar)((31*136.2+58000)/256);PCA0CPL4 = (uchar)((uint)(31*30+58000)%256);PCA0CPH4 = (uchar)((31*30+58000)/256);void Port_IO_Init(){P0MDOUT = 0xC3;P1MDOUT = 0x01;P2MDOUT = 0x80;P0SKIP = 0x0C;P1SKIP = 0x06;XBR0 = 0x01;XBR1 = 0x45;P2_7 = 0;}void Oscillator_Init(){OSCICN = 0x82;}void Timer_Init(){TCON = 0x40;TMOD = 0x20;CKCON = 0x01;TL1 = 0x61;TH1 = 0x61;}void UART_Init(){SCON0 = 0x10;}void Interrupts_Init(){IE = 0x90;}void Delay(uint dly){uint i,j;for(i=0;i<dly;i++)for(j=0;j<1000;j++) ; }// Initialization function for device,// Call Init_Device() from your main program void Init_Device(void){Init_Variables();PCA_Init();Port_IO_Init();Oscillator_Init();Timer_Init();// Delay(5);UART_Init();Interrupts_Init();}void you_1_duoji(uchar x){PCA0CPL0 = (uchar)((uint)(31*x+58000)%256);PCA0CPH0 = (uchar)((31*x+58000)/256);}void you_2_duoji(uchar x){PCA0CPL1 = (uchar)((uint)(31*x+58000)%256);PCA0CPH1 = (uchar)((31*x+58000)/256);}void you_3_duoji(uchar x){PCA0CPL2 = (uchar)((uint)(31*x+58000)%256);PCA0CPH2 = (uchar)((31*x+58000)/256);}void you_4_duoji(uchar x){PCA0CPL3 = (uchar)((uint)(31*x+58000)%256);PCA0CPH3 = (uchar)((31*x+58000)/256);}void you_5_duoji(uchar x){PCA0CPL4 = (uchar)((uint)(31*x+58000)%256);PCA0CPH4 = (uchar)((31*x+58000)/256);}void walk(){switch(act)case walk_you_1 :you_1_duoji(arc);break;case walk_you_5 :you_5_duoji(arc);break;case walk_you_2 :you_2_duoji(arc);break;case walk_you_3 :you_3_duoji(arc);break;case walk_you_4 :you_4_duoji(arc);break;default :break;}}void main(){Init_Device();while(1);}void UART_Interrupt(void) interrupt 4 {uchar dat,i;// uchar mark;if(RI0==1){for(i=0;i<2;i++){while(!RI0);dat=SBUF0;if(dat>180)act=dat;elsearc=dat;RI0=0;}walk();}主控制板初始化:#include "c8051f310.h"void PCA_Init(){PCA0CN = 0x40;PCA0MD &= ~0x40;PCA0MD = 0x08;PCA0CPM0 = 0xC2;PCA0CPM1 = 0xC2;PCA0CPM2 = 0xC2;PCA0CPM3 = 0xC2;PCA0CPM4 = 0xC2;PCA0CPL0 = 0xB8;PCA0CPL1 = 0xB8;PCA0CPL2 = 0xB8;PCA0CPL3 = 0xB8;PCA0CPL4 = 0xB8;PCA0CPH0 = 0xFE;PCA0CPH1 = 0xFE;PCA0CPH2 = 0xFE;PCA0CPH3 = 0xFE;PCA0CPH4 = 0xFE;}void Port_IO_Init(){P0SKIP = 0x0C;P1SKIP = 0x06;XBR0 = 0x01;XBR1 = 0x4D;}void Oscillator_Init(){int i = 0;OSCXCN = 0x67;for (i = 0; i < 3000; i++); // Wait 1ms for initialization while ((OSCXCN & 0x80) == 0);CLKSEL = 0x01;OSCICN = 0x00;}void Timer_Init(){TMOD = 0x20;CKCON = 0x01;TL1 = 0x70;TH1 = 0x70;}void UART_Init(){SCON0 = 0x10;}void Interrupts_Init(){IE = 0x90;}// Initialization function for device,// Call Init_Device() from your main program void Init_Device(void){PCA_Init();Port_IO_Init();Oscillator_Init();Timer_Init();UART_Init();Interrupts_Init();}void main(){Init_Device();}执行动作:void Walk(void){uchar i;for(i=0;i<11;i++) //右腿,,关节抬起。