【CN110097596A】一种基于opencv的目标检测系统【专利】
【CN110059547A】目标检测方法及装置【专利】
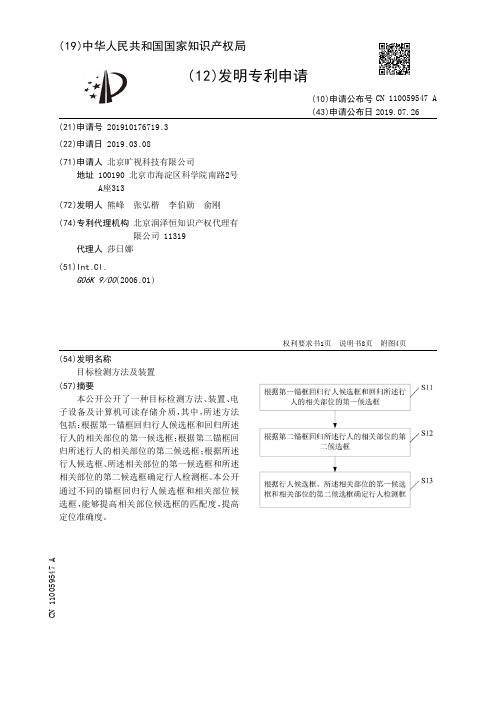
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910176719.3(22)申请日 2019.03.08(71)申请人 北京旷视科技有限公司地址 100190 北京市海淀区科学院南路2号A座313(72)发明人 熊峰 张弘楷 李伯勋 俞刚 (74)专利代理机构 北京润泽恒知识产权代理有限公司 11319代理人 莎日娜(51)Int.Cl.G06K 9/00(2006.01)(54)发明名称目标检测方法及装置(57)摘要本公开公开了一种目标检测方法、装置、电子设备及计算机可读存储介质,其中,所述方法包括:根据第一锚框回归行人候选框和回归所述行人的相关部位的第一候选框;根据第二锚框回归所述行人的相关部位的第二候选框;根据所述行人候选框、所述相关部位的第一候选框和所述相关部位的第二候选框确定行人检测框。
本公开通过不同的锚框回归行人候选框和相关部位候选框,能够提高相关部位候选框的匹配度,提高定位准确度。
权利要求书1页 说明书8页 附图4页CN 110059547 A 2019.07.26C N 110059547A权 利 要 求 书1/1页CN 110059547 A1.一种目标检测方法,其特征在于,包括:根据第一锚框回归行人候选框和回归所述行人的相关部位的第一候选框;根据第二锚框回归所述行人的相关部位的第二候选框;根据所述行人候选框、所述相关部位的第一候选框和所述相关部位的第二候选框确定行人检测框。
2.根据权利要求1所述的目标检测方法,其特征在于,所述根据所述行人候选框、所述相关部位的第一候选框和所述相关部位的第二候选框确定行人检测框,包括:根据所述相关部位的第一候选框和所述相关部位的第二候选框确定最终的相关部位候选框;根据所述行人候选框和所述最终的相关部位候选框确定行人检测框。
3.根据权利要求2所述的目标检测方法,其特征在于,所述根据所述相关部位的第一候选框和所述相关部位的第二候选框确定最终的相关部位候选框,包括:计算所述相关部位的第二候选框与所述相关部位的第一候选框的交并比;根据所述交并比确定最终的相关部位候选框。
【CN110009663A】一种目标跟踪方法、装置、设备及计算机可读存储介质【专利】
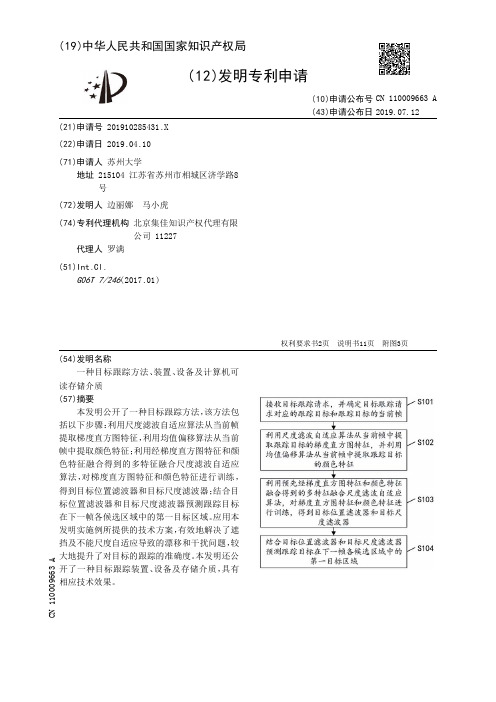
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910285431.X(22)申请日 2019.04.10(71)申请人 苏州大学地址 215104 江苏省苏州市相城区济学路8号(72)发明人 边丽娜 马小虎 (74)专利代理机构 北京集佳知识产权代理有限公司 11227代理人 罗满(51)Int.Cl.G06T 7/246(2017.01)(54)发明名称一种目标跟踪方法、装置、设备及计算机可读存储介质(57)摘要本发明公开了一种目标跟踪方法,该方法包括以下步骤:利用尺度滤波自适应算法从当前帧提取梯度直方图特征,利用均值偏移算法从当前帧中提取颜色特征;利用经梯度直方图特征和颜色特征融合得到的多特征融合尺度滤波自适应算法,对梯度直方图特征和颜色特征进行训练,得到目标位置滤波器和目标尺度滤波器;结合目标位置滤波器和目标尺度滤波器预测跟踪目标在下一帧各候选区域中的第一目标区域。
应用本发明实施例所提供的技术方案,有效地解决了遮挡及不能尺度自适应导致的漂移和干扰问题,较大地提升了对目标的跟踪的准确度。
本发明还公开了一种目标跟踪装置、设备及存储介质,具有相应技术效果。
权利要求书2页 说明书11页 附图3页CN 110009663 A 2019.07.12C N 110009663A权 利 要 求 书1/2页CN 110009663 A1.一种目标跟踪方法,其特征在于,包括:接收目标跟踪请求,并确定所述目标跟踪请求对应的跟踪目标和所述跟踪目标的当前帧;利用尺度滤波自适应算法从所述当前帧中提取所述跟踪目标的梯度直方图特征,并利用均值偏移算法从所述当前帧中提取所述跟踪目标的颜色特征;利用预先经梯度直方图特征和颜色特征融合得到的多特征融合尺度滤波自适应算法,对所述梯度直方图特征和所述颜色特征进行训练,得到目标位置滤波器和目标尺度滤波器;结合所述目标位置滤波器和所述目标尺度滤波器预测所述跟踪目标在下一帧各候选区域中的第一目标区域。
【CN110096960A】目标检测方法及装置【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910267161.X(22)申请日 2019.04.03(71)申请人 罗克佳华科技集团股份有限公司地址 101100 北京市通州区中关村科技园区通州园光机电一体化产业基地政府路2号212室申请人 成都佳华物链云科技有限公司(72)发明人 李玮 廖强 李辰 万辉 (74)专利代理机构 北京超凡宏宇专利代理事务所(特殊普通合伙) 11463代理人 周宇(51)Int.Cl.G06K 9/00(2006.01)G06K 9/46(2006.01)G06N 3/04(2006.01)G06N 3/08(2006.01)(54)发明名称目标检测方法及装置(57)摘要本申请涉及目标检测技术领域,提供一种目标检测方法及装置。
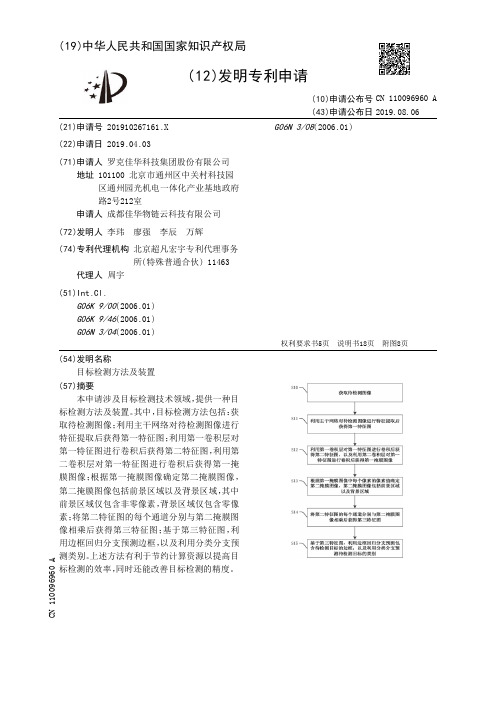
其中,目标检测方法包括:获取待检测图像;利用主干网络对待检测图像进行特征提取后获得第一特征图;利用第一卷积层对第一特征图进行卷积后获得第二特征图,利用第二卷积层对第一特征图进行卷积后获得第一掩膜图像;根据第一掩膜图像确定第二掩膜图像,第二掩膜图像包括前景区域以及背景区域,其中前景区域仅包含非零像素,背景区域仅包含零像素;将第二特征图的每个通道分别与第二掩膜图像相乘后获得第三特征图;基于第三特征图,利用边框回归分支预测边框,以及利用分类分支预测类别。
上述方法有利于节约计算资源以提高目标检测的效率,同时还能改善目标检测的精度。
权利要求书5页 说明书18页 附图8页CN 110096960 A 2019.08.06C N 110096960A权 利 要 求 书1/5页CN 110096960 A1.一种目标检测方法,其特征在于,用于利用预训练的神经网络模型检测待检测目标,所述神经网络模型包括主干网络、第一卷积层、第二卷积层、边框回归分支以及分类分支,所述方法包括:获取待检测图像;利用所述主干网络对所述待检测图像进行特征提取后获得第一特征图;利用所述第一卷积层对所述第一特征图进行卷积后获得第二特征图,以及利用所述第二卷积层对所述第一特征图进行卷积后获得第一掩膜图像;根据所述第一掩膜图像中每个像素的像素值确定第二掩膜图像,所述第二掩膜图像包括前景区域以及背景区域,所述第二掩膜图像在所述前景区域中仅包含非零像素,表示对所述第二特征图中包含所述待检测目标的区域的预测,所述第二掩膜图像在所述背景区域中仅包含零像素,表示对所述第二特征图中不包含所述待检测目标的区域的预测;将所述第二特征图的每个通道分别与所述第二掩膜图像相乘后获得第三特征图;基于所述第三特征图,利用所述边框回归分支预测包含所述待检测目标的边框,以及利用所述分类分支预测所述待检测目标的类别。
一种基于目标检测的目标跟踪方法及系统[发明专利]
![一种基于目标检测的目标跟踪方法及系统[发明专利]](https://img.taocdn.com/s3/m/d5704257793e0912a21614791711cc7931b778dc.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911393936.4(22)申请日 2019.12.30(71)申请人 华中科技大学地址 430074 湖北省武汉市洪山区珞喻路1037号(72)发明人 秦淮 高常鑫 桑农 (74)专利代理机构 华中科技大学专利中心42201代理人 李智(51)Int.Cl.G06T 7/246(2017.01)G06K 9/46(2006.01)G06N 3/04(2006.01)G06N 3/08(2006.01)G06K 9/62(2006.01)(54)发明名称一种基于目标检测的目标跟踪方法及系统(57)摘要本发明公开了一种基于目标检测的目标跟踪方法及系统,模式识别技术领域,包括:为待跟踪目标建立包括主干网络和推理网络的目标跟踪模型,主干网络为目标检测模型中已训练好的特征提取网络;在目标视频中的第一帧F 1上创建多个正样本,通过模型训练初始化推理网络;依次获取目标视频中的帧作为当前帧,利用目标跟踪模型获得当前帧中的多个候选区域及其检测得分和目标位置坐标;根据空间约束对检测得分进行修正,得到跟踪得分;若跟踪得分最高的目标区域的跟踪得分Score>Th S ,则跟踪成功,并创建正、负样本,加入到样本库中;若Th F ≤Score≤Th S ,则判定跟踪成功;若Score<Th F ,则判定踪失败,并利用样本库中推理网络进行在线更新。
本发明能够实现对目标的持续、准确的跟踪。
权利要求书2页 说明书8页 附图1页CN 111192294 A 2020.05.22C N 111192294A1.一种基于目标检测的目标跟踪方法,其特征在于,包括:为待跟踪目标建立目标跟踪模型,所述目标跟踪模型包括主干网络和推理网络;所述主干网络,用于提取深度特征,并在所得到的特征图上以不同尺度的候选框提取候选区域的区域特征;所述推理网络,用于根据区域特征为每一个候选区域打分,以得到各候选区域的检测得分,并对各候选区域进行回归,以获得更为精确的目标位置坐标;所述主干网络为目标检测模型中用于提取特征的网络,且已训练好;获取待处理的目标视频中的第一帧F1,在其上通过数据增强的方式创建多个正样本,并利用所得到的正样本训练所述目标跟踪模型,以初始化所述推理网络;在所述推理网络初始化之后,依次获取所述目标视频中的帧作为当前帧,并按照如下步骤对各帧进行目标跟踪:(S1)利用所述目标跟踪模型获得所述待跟踪目标在当前帧中的多个候选区域,以及各候选区域的检测得分和目标位置坐标;(S2)根据空间约束对检测得分进行修正,以得到各候选区域的跟踪得分,并将跟踪得分最高的候选区域确定为目标区域;(S3)若目标区域的跟踪得分Score>Th S,则判定当前帧跟踪成功,并根据当前帧创建正、负样本,加入到样本库中;若Th F≤Score≤Th S,则判定当前帧跟踪成功;若Score<Th F,则判定当前帧跟踪失败,并利用所述样本库中的样本对所述目标跟踪模型进行重新训练,以对所述推理网络进行在线更新;其中,Th S为预设的成功阈值,Th F为预设的失败阈值;所述样本库用于在目标跟踪过程中存储正、负样本,初始时刻,其中样本数量为0;所述空间约束与待跟踪目标在当前帧及前一帧中的空间位置和尺度的变化相关。
【CN110197126A】一种目标追踪方法、装置及便携式终端【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910371093.1(22)申请日 2019.05.06(71)申请人 深圳岚锋创视网络科技有限公司地址 518101 广东省深圳市宝安区新安街道海秀路龙光世纪大厦A座601室(72)发明人 姜文杰 (51)Int.Cl.G06K 9/00(2006.01)G06K 9/32(2006.01)(54)发明名称一种目标追踪方法、装置及便携式终端(57)摘要本发明提供了一种目标追踪方法、装置及便携式终端。
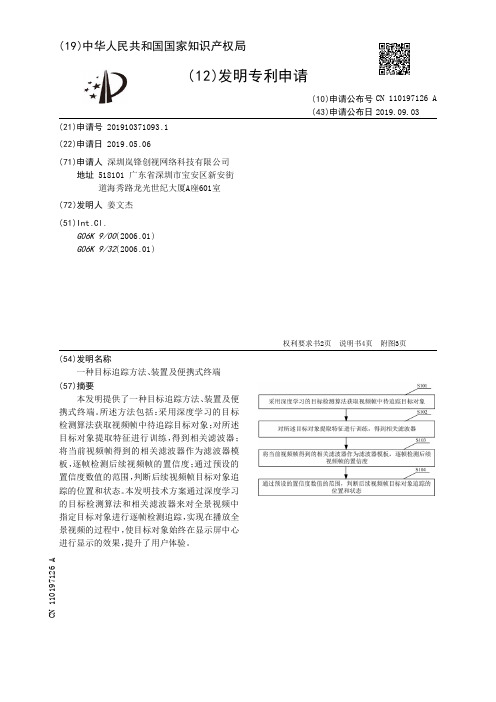
所述方法包括:采用深度学习的目标检测算法获取视频帧中待追踪目标对象;对所述目标对象提取特征进行训练,得到相关滤波器;将当前视频帧得到的相关滤波器作为滤波器模板,逐帧检测后续视频帧的置信度;通过预设的置信度数值的范围,判断后续视频帧目标对象追踪的位置和状态。
本发明技术方案通过深度学习的目标检测算法和相关滤波器来对全景视频中指定目标对象进行逐帧检测追踪,实现在播放全景视频的过程中,使目标对象始终在显示屏中心进行显示的效果,提升了用户体验。
权利要求书2页 说明书4页 附图3页CN 110197126 A 2019.09.03C N 110197126A1.一种目标追踪方法,其特征在于,包括以下步骤:采用深度学习的目标检测算法获取视频帧中待追踪目标对象;对所述目标对象提取特征进行训练,得到相关滤波器;将当前视频帧得到的相关滤波器作为滤波器模板,逐帧检测后续视频帧的置信度;通过预设的置信度数值的范围,判断后续视频帧目标对象追踪的位置和状态。
2.如权利要求1所述的目标追踪方法,其特征在于:所述采用深度学习的目标检测算法获取视频帧中待追踪目标对象具体为:采用深度学习的目标检测算法对视频帧中物体进行检测,所述目标检测方法可以为ssd算法、rcnn算法和yolo;获取用户选定的目标对象,采用矩形框进行标识,矩形框的长宽为目标对象的自适应长宽。
一种目标检测方法、装置、电子设备及存储介质
专利名称:一种目标检测方法、装置、电子设备及存储介质专利类型:发明专利
发明人:王哲,石建萍,周辉
申请号:CN202010712662.7
申请日:20200722
公开号:CN113970752A
公开日:
20220125
专利内容由知识产权出版社提供
摘要:本公开提供了一种目标检测方法、装置、电子设备及存储介质,其中,该方法包括:获取雷达装置扫描得到的多帧点云数据,以及扫描得到的每一帧点云数据的时间信息;基于每一帧点云数据,确定待检测目标的位置信息;基于每一帧点云数据中的待检测目标的位置信息,确定每一帧点云数据中,待检测目标被雷达装置扫描到时的扫描方向角信息;根据每一帧点云数据中的待检测目标的位置信息、每一帧点云数据中待检测目标被雷达装置扫描到时的扫描方向角信息,以及扫描得到的每一帧点云数据的时间信息确定待检测目标的移动信息。
本公开结合扫描得到的每一帧点云数据的时间信息、以及每一帧点云数据中待检测目标的相关信息确定目标的移动信息,准确度较高。
申请人:商汤集团有限公司
地址:中国香港新界沙田香港科学园科技大道西一号核心大楼第二座2楼226-230室
国籍:CN
代理机构:北京中知恒瑞知识产权代理事务所(普通合伙)
代理人:王文红
更多信息请下载全文后查看。
一种目标检测方法、系统、装置及存储介质[发明专利]
![一种目标检测方法、系统、装置及存储介质[发明专利]](https://img.taocdn.com/s3/m/9a0bac19910ef12d2bf9e774.png)
专利内容由知识产权出版社提供
专利名称:一种目标检测方法、系统、装置及存储介质 专利类型:发明专利 发明人:葛海玉,杨琳,郝禄国,曾文彬,陈景明,李燊,吴楚权 申请号:CN201910502899.X 申请日:20190611 公开号:CN110533022A 公开日:20191203Байду номын сангаас
摘要:本发明公开了一种目标检测方法、系统、装置及存储介质,方法包括:对待检测图像进行 特征提取,生成得到特征图;对特征图进行特征提取,得到第一特征信息;对特征图进行注意力特征 提取,得到第二特征信息;将第一特征信息和第二特征信息进行合并,得到目标特征信息;生成候选 框,并将候选框投影到目标特征信息上,得到感兴趣区域;对感兴趣区域进行分类预测,得到最终分 类得分和最终边界框。本发明通过将第一特征信息和第二特征信息进行合并得到目标特征信息,使得 特征具有更强的语义信息,从而能大大提高目标检测的准确率。本发明可广泛应用于目标检测领域 中。
一种目标检测方法及系统[发明专利]
![一种目标检测方法及系统[发明专利]](https://img.taocdn.com/s3/m/61330ca8be1e650e53ea991c.png)
专利名称:一种目标检测方法及系统
专利类型:发明专利
发明人:邹腊梅,乔森,车鑫,聂士伟,李广磊,连志祥,严青,钟胜,杨卫东
申请号:CN202110039522.2
申请日:20210113
公开号:CN112801146A
公开日:
20210514
专利内容由知识产权出版社提供
摘要:本发明公开了一种目标检测方法和系统,针对目标检测任务需要自注意力关注特定类别目标对应原始图像所在区域的特点,将注意力机制运用于目标检测中,所设计的网络结构不同于通用的元学习网络框架,采用分类分支层所得的类别概率监督与特征提取层连接的类别注意力层,从而引导回归分支层进行目标位置的计算,实现基于类别区分的自监督注意力机制,提升目标检测模型的检测精度。
进一步地,结合小样本目标检测任务由于小样本数量较少,网络难以学习到小样本特征的特点,将大样本图像和小样本图像进行拼接,作为样本图像对目标检测模型进行训练,使得网络兼顾学习大样本图像和小样本图像,从提升目标检测模型的对小样本的检测能力。
申请人:华中科技大学
地址:430074 湖北省武汉市洪山区珞喻路1037号
国籍:CN
代理机构:华中科技大学专利中心
更多信息请下载全文后查看。
【CN110009096A】基于嵌入式设备的目标检测网络模型优化方法【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910168788.X(22)申请日 2019.03.06(71)申请人 开易(北京)科技有限公司地址 100102 北京市朝阳区望京SOHO塔1B座1711(72)发明人 祁亚斐 刘建军 左思 张世亮 (74)专利代理机构 北京卓唐知识产权代理有限公司 11541代理人 唐海力 李志刚(51)Int.Cl.G06N 3/04(2006.01)G06N 3/08(2006.01)(54)发明名称基于嵌入式设备的目标检测网络模型优化方法(57)摘要本发明实施公开一种基于嵌入式设备的目标检测网络模型优化方法,其中方法包括如下步骤:基于可变参数替换网络模型中的目标常量;根据当前嵌入式设备的设备算力设置所述可变参数的参数值;根据所述可变参数的参数值对所述网络模型进行模型优化处理,确定所述网络模型的模型特征。
采用本发明,通过将网络模型中部分结构配置参数化为超参数因子,再结合低算力嵌入式设备特点对检测算法进行了改进,可以面向不同算力嵌入式设备进行灵活配置,实现实时目标检测。
权利要求书1页 说明书4页 附图3页CN 110009096 A 2019.07.12C N 110009096A权 利 要 求 书1/1页CN 110009096 A1.一种基于嵌入式设备的目标检测网络模型优化方法,其特征在于,包括:基于可变参数替换网络模型中的目标常量;根据当前嵌入式设备的设备算力设置所述可变参数的参数值;根据所述可变参数的参数值对所述网络模型进行模型优化处理,确定所述网络模型的模型特征。
2.根据权利要求1所述的方法,其特征在于:所述目标常量为所述网络模型中的通道数;所述可变参数为通道参数。
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据所述设备算力调整所述网络模型中深度块的数量;根据调整后所述深度块的数量优化所述网络模型的模型特征。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910362715.4
(22)申请日 2019.04.30
(71)申请人 湖北大学
地址 430062 湖北省武汉市武昌区友谊大
道368号湖北大学教育学院
(72)发明人 牛鑫鑫 陈侃松 董健 王周宇
(74)专利代理机构 武汉科皓知识产权代理事务
所(特殊普通合伙) 42222
代理人 鲁力
(51)Int.Cl.
G06T 7/62(2017.01)
G06T 7/13(2017.01)
G06T 5/00(2006.01)
G06K 9/62(2006.01)
(54)发明名称一种基于opencv的目标检测系统(57)摘要本发明涉及一种基于opencv的目标检测系统,包括面积筛选模块:采集图像并进行预处理,并根据设置阈值基于面积筛选算法计算像素面积,最后根据得到的像素面积基于实际面积算法计算图像实体的实际面积;图形存在判断模块:采集图像并选取样本,基于图形有无检测算法对选取待测物体进行判断,得到判断结果;轮廓辨别模块:采集图像并选取样本,基于轮廓辨别检测算法对选取待测物体进行图像处理,得到判断结果;相似检测模块:采集图像并选取样本,基于相似检测算法对选取待测物体进行相似度判断,得到判断结果。
本发明具有如下优点:可以计算物体的实际面积;在保证准确性的同时,提升了运算速度,毫秒级;
工业现场的需求性非常大。
权利要求书3页 说明书8页 附图14页CN 110097596 A 2019.08.06
C N 110097596
A
1.一种基于opencv的目标检测系统,其特征在于,包括:
面积筛选模块:采集图像并进行预处理,并根据设置阈值基于面积筛选算法计算像素面积,最后根据得到的像素面积基于实际面积算法计算图像实体的实际面积;
图形存在判断模块:采集图像并选取样本,基于图形有无检测算法对选取待测物体进行判断,得到判断结果;
轮廓辨别模块:采集图像并选取样本,基于轮廓辨别检测算法对选取待测物体进行图像处理,得到判断结果;
相似检测模块:采集图像并选取样本,基于相似检测算法对选取待测物体进行相似度判断,得到判断结果。
2.根据权利要求1所述的一种基于opencv的目标检测系统,其特征在于,所述面积筛选模块中,对图像进行预处理具体包括以下步骤:
步骤2.1、针对摄像头采集图像,进行图像灰度化,具体根据重要性及其它指标,将三个分量以不同的权值进行加权平均;由于人眼对绿色的敏感最高,对蓝色敏感最低,因此,按下式对RGB三分量进行加权平均能得到较合理的灰度图像;
Gray(i ,j)=0.299*R(i ,j)+0.578*G(i ,j)+0.114*B(i ,j)
其中,R(i ,j),G(i ,j),B(i ,j)代表处理前红,绿,蓝三个通道的颜色数值;
步骤2.2、针对步骤2.1得到的灰度图进行高斯平滑处理;
步骤2.3、针对步骤2.2高斯平滑处理之后得到的图像,我们再进行边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘,包括了二维图像上的边缘、角点、纹理基元图。
3.根据权利要求1所述的一种基于opencv的目标检测系统,其特征在于,所述面积筛选模块中,面积筛选算法具体包括以下步骤:
步骤3.1、针对步骤2.3中边缘检测后的图像,进行寻找轮廓,具体令边缘检测后的图像作为八位单通道图像阵列,保存函数运算后的结果,轮廓检索模式采取只检测最外层轮廓,轮廓近似办法压缩水平、垂直、对角元素,只保留该方向的终点坐标,最终查找到轮廓;
步骤3.2、针对步骤3.1寻找到的所有轮廓,进行计算轮廓面积,在计算部分轮廓的情况时,由轮廓弧线和连接两端点的弦围成的区域总面积被计算,轮廓的位置将影响区域面积的符号,因此函数范围的有可能是负值;
步骤3.3、针对步骤3.2计算得到的所有轮廓面积,设置像素面积的阈值大小,也就是设置像素面积的上下限,采用面积筛选算法筛选出我们需要的轮廓面积;
步骤3.4、针对步骤3.3筛选得到的所有符合要求的轮廓面积的轮廓,进行绘制轮廓,具体将步骤3.3筛选得到的轮廓作为要绘制轮廓的图像,所有输入的轮廓,每个轮廓被保存成一个point向量,设置连通性,粗细,颜色绘制出轮廓;
步骤3.5、针对步骤3.2计算得到轮廓的像素面积,通过像素面积大小,通过像素面积,摄像头镜头与物体距离之间比例关系,
计算出物体的实际面积大小;
其中,L 1表示摄像头镜头与物体距离,单位为cm,K是一个固定的比例系数。
权 利 要 求 书1/3页2CN 110097596 A。