现代过程装备与控制工程 概论 第一章 魏新利
控制工程基础第一章 概论(含习题答案)

数字控制系统:采用计算机或数字控制器,其离散信号以数码形式传递的系统。
xi t
模拟量
A/D
数字量
计算机
数字量
D/A
模拟量
控制对象
xo t
检测装置
② 根据输入信号的特征
恒值调节系统:给定量恒定,分析重点在于如何克服扰动对被调 量的影响。 随动系统:被调量随给定量的变化而变化,要求输出量能准确、 快速地复现给定量。
① 给定元件:产生给定信号或输入信号。 ② 反馈元件:量测被调量或输出信号,产 生主反馈信号。 ③ 比较元件:比较输入信号和反馈信号之 间的偏差。 ④ 放大元件:对偏差信号进行信号放大和 功率放大的元件。
⑤ 执行元件:直接对控制对象进行操作的元件。 ⑥ 控制对象:控制系统所要操纵的对象,其输 出量为系统的被调量(或被控制量)。 ⑦ 校正元件:用以稳定控制系统,提高性能。 a) 反馈校正 b) 串联校正
⑤ 按系统参数与时间的关系
①开环控制:输入直接供给控制器,通过控制器对受控对象产生控制 作用,没有输出反馈。
优点:结构简单、价格便宜、容易维修,不存在稳定性问题。 缺点:精度低,容易受环境变化的干扰影响。
参考输入 控制器 控制 指令 扰动 输出 受控对象
Mc恒定:ur↑ → ua↑ → n↑ ; ur ↓ → ua ↓ → n ↓ ur恒定: Mc ↑ → n↓ ; Mc ↓ → n ↑
1.2 自动控制系统的基本概念
5. 自动控制系统的基本类型
① 根据所采用信号处理技术的不同
模拟控制系统:采用模拟技术处理信号。 数字控制系统:采用数字技术处理信号。
偏差的脉冲系列
脉冲控制系统:离散信号取脉冲形式的系统
过程控制理论课教案2018(36学时)

2
授课日期
3.20
教学目标
通过本节课的学习,要求学生掌握控制算法和各种控制的特点、构成以及工作原理。
教学重点
控制装置的认识。
教学难点
控制算法;控制器的工作原理。
教学方法与手段
主要以课堂讲授为主,以多媒体和板书相结合的方法进行授课。
教
学
基
本
内
容
1.控制装置
(1)控制装置概述
(2)连续比例积分微分控制算法
通过本节课的学习,要求学生了解蒸发器和加热炉的特性和控制。
教学重点
加热炉的控制。
教学难点
加热炉的控制。
教学方法与手段
主要以课堂讲授为主,以多媒体和板书相结合的方法进行授课。
教
学
基
本
内
容
1.蒸发器的控制
(1)蒸发器的特性
(2)蒸发器的主控制回路
(3)蒸发器的辅助控制回路
2.管式加热炉的控制
(1)加热炉的简单控制
(2)预测控制算法
(3)预测控制的工业应用
2.推断控制
3.纯滞后补偿控制
讨论、练习与作业
课后总结及教学反思
《过程控制》课程教案
授课教师 第 14 次
授课题目
第6章 先进控制技术
教学时数
2
授课日期
5.1
教学目标
通过本节课的学习,要求学生掌握解耦控制和智能控制的基本结构和应用。
教学重点
解耦控制和智能控制的类型及基本原理。
讨论、练习与作业
课后总结及教学反思
《过程控制》课程教案
授课教师 第 7 次
授课题目
第四章 简单控制系统
教学时数
过程设备设计课程设计-45m液氨储罐设计

中北大学课 程 设 计 说 明 书学生姓名: 学 号: 学 院: 机械工程与自动化学院 专 业: 过程装备与控制工程 题 目: 〔〕M 3液氯储罐设计指导教师:职称:2021年06月08日陆辉山 闫宏伟 高 强魏秀业 刘 波 崔宝珍中北大学课程设计任务书2021/2021 学年第二学期学院:机械工程与自动化学院专业:学生姓名:学号:课程设计题目:〔45〕M3液氯储罐设计起迄日期:06 月08 日~06月22日课程设计地点:校内指导教师:陆辉山闫宏伟高强系主任:姚竹亭下达任务书日期: 2021年06月08日压力容器的用途十分广泛。
它是在石油化学工业、能源工业、科研和军工等国民经济的各个部门都起着重要作用的设备。
压力容器一般由筒体、封头、法兰、密封元件、开孔和接管、支座等六大局部构成容器本体。
此外,还配有平安装置、表计及完成不同生产工艺作用的内件。
压力容器由于密封、承压及介质等原因,容易发生爆炸、燃烧起火而危及人员、设备和财产的平安及污染环境的事故。
目前,世界各国均将其列为重要的监检产品,由国家指定的专门机构,按照国家规定的法规和标准实施监督检查和技术检验。
本次课程设计目的主要是使用国家最新压力容器标准、标准进行设计,掌握典型过程设备设计的全过程;掌握查阅和综合分析文献资料的能力,进行设计方法和设计方案的可行性研究和论证;掌握电算设计计算,要求设计思路清晰,计算数据准确、可靠,且正确掌握计算机操作和专业软件的使用;掌握工程图纸的计算机绘图。
1 工艺设计 (1) (1) (1)2筒体及封头设计 (2) (2) (2) (3)3接管及接管法兰设计 (4) (4) (4) (5) (6) (7)4人孔的结构设计 (8) (8) (8) (9)5支座的设计 (12) (12) (13)6液面计及平安阀选择 (14)7总体布局 (14)8焊接结构设计及焊条的选择 (14)9强度校核 (17)10参考文献 (35)1 工艺设计1.1 存储量盛装液化气体的压力容器设计存储量t V W ρφ=式中:W ——储存量,t ; φ——装载系数; V ——压力容器容积;t ρ——设计温度下的饱和溶液的密度,3m t ;根据设计条件t V W ρφ==0.945 1.31453.22t t ⨯⨯=1.2 设备的选型及轮廓尺寸粗略计算内径: 32454m L D i =π一般2=DL,取4=DL得2429i D mm =,圆整得:mm D i 2500=选用EHA 椭圆封头,查?EHA 椭圆形封头内外表积及容积表?可得:深度mm B 665=,内外表积20861.7m A =,容积32417.2m V =封根据32g 45242m V L D V V V i =+=+=封封筒πm m D V V L i g 8254422=-=π封,圆整得:mm L 8300=32223.452417.223.85.24242m V L D V V V i =⨯+⨯⨯=+=+=ππ封封筒计误差100%0.51%ggV V V -⨯=计3m 70.4023.459.0=⨯==计工V V φ所以,筒体的公称直径mm D i 2500=,长度mm L 8300=2 筒体及封头设计2.1 材料的选择液氯属于高危害性的介质,但其腐蚀性小,使用温度为C 。
现代控制工程(第一章)b
2019/11/7
华中科技大学机械学院
36
Water Pressure Simulator
2019/11/7
华中科技大学机械学院
37
Device to Control Hydraulic Noise of the Rudder Used in Submarine
2019/11/7
华中科技大学机械学院
2019/11/7
华中科技大学机械学院
31
The Flight Training Simulator for Z-9
Helicopter developed for No.1 Air Force
Flight Academy
2019/11/7
华中科技大学机械学院
32
6-DOF Motion Platform
现代控制工程
第一章 绪论
1-1 控制理论简介 1-2 现代控制理论与古典控制理论的比较 1-3 本课程讲述的主要内容
2019/11/7
华中科技大学机械学院
1
控制理论的产生和发展要分为以下几个发展阶段:
第一阶段: 经典(自动)控制理论
经典控制理论即古典控制理论,也称为自动控 制理论。它的发展大致经历了以下几个过程:
2.1959年美籍匈牙利人 卡尔曼 (Kalman)和布西创建了卡尔 曼滤波理论;1960年在控制系 统的研究中成功地应用了状态 空间法,并提出了可控性和可 观测性的新概念。
卡尔曼
2019/11/7
华中科技大学机械学院
14
3. 1961年庞特里亚金(俄国人) 提出了极小(大)值原理。
以状态空间描述作为系统的 数学模型,以状态变量法为基 础,用时域的方法来分析和设 计控制系统的理论。
过程装备与控制工程第1章ppt课件
30
过程装备控制技术与应用 有自衡特性的单容对象
设水槽的横截面积为A,而A是个常数,则因为
V(A2-H 2)
所以
dV AdH dt (2-3)dt
调节阀的特性:在其它条件不变的情况下,通过调节阀 的流体流量与阀的开度以及阀前后的流体压降有关。
31
过程装备控制技术与应用
36
过程装备控制技术与应用
37
过程装备控制技术与应用
(2)双容液位对象(图2-5)
它有两个串联在一起的水槽,它们之间的连通管具有阻力, 因此两者的液位是不同的,来水qv1(系统输入)先进入水槽 1,然后再通过水槽2流出。水流入量qv1由阀1控制,流出量 qv2决定于阀2的开度(根据用户的需要改变),被控变量是 水槽2的液位h2 (系统输出) 。分析h2在阀1开度扰动下的动 态特性。根据物料平衡方程有:
回顾:《机械控制工程基础》§3.5 控制系统的动 态响应指标
20
过程装备控制技术与应用
偏差积分性能指标
误差: e(t)r(t)y(t) e(t)y( )y(t)
平方误差积分性能指标(ISE) 时间平方误差积分性能指标(ITSE) 绝对误差积分性能指标(IAE) 时间绝对误差积分性能指标(ITAE)
5
过程装备控制技术与应用
§1.1.2 过程装备控制的任务和要求
过程装备控制是针对过程装备的主要参数,即温度、 压力、流量、液位、成分和物性参数进行控制。 过程装备控制要求:安全性、经济性和 稳定性。 自动控制系统的要求:稳、准、快。
控制的任务:在了解、掌握工艺流程和生产过程的 静态和动态特性的基础上,根据上述三项要求,应 用理论对控制系统进行分析和综合,最后采用合适 的技术手段加以实现
陕西科技大学 过程装备与控制工程 课件 1机械设计(王宁侠)第1章
第1章 绪论 3. 可靠性设计 可靠性设计是以概率论和数理统计为理论基础,以失效分 析、失效预测及各种可靠性试验为依据,以保证产品的可靠性 为目标的一种现代设计方法。其主要特点是将传统设计中视为 单值而实际上具有多值性的设计变量(如载荷、材料性能和应
章)。
第1章 绪论 (2) 通用机械零部件设计(第5~18章)。 ① 传动零件:带传动、链传动、齿轮传动、蜗杆传动及 螺旋传动。 ② 轴系零部件:滑动轴承、滚动轴承、轴及联轴器、离 合器、制动器。
③ 联接零件:螺纹联接、铆接、焊接、粘接及轴毂联接。
④ 其他零部件:弹簧、机座与箱体。 (3) 总体构思与设计(结合课程设计进行)。
即可寻优求解。常用的优化算法有0.618法、Powell法、变尺度
法、惩罚函数法、基因算法等。采用优化设计方法可以在多变 量、多目标的条件下,获得高效率、高精度的设计结果,极大
地提高设计质量。
第1章 绪论
2. 计算机辅助设计 计算机辅助设计(CAD)是利用计算机运算快、计算准确、存储 量大、逻辑判断功能强等特点进行设计信息处理,并通过人机交互 作用完成设计工作的一种设计方法。它包括分析计算、自动绘图系 统和数据库三个方面。一个完整的机械产品CAD系统,应首先能够 确定机械结构的最佳参数和几何尺寸,这就要求具有进行机构运动 分析及综合、有限元分析和优化设计、可靠性设计等功能,然后能 够由分析计算结果自动显示和绘制机械的装配图和零件图,并可进 行动态修改。完善的数据库系统,可与计算机辅助制造、计算机辅 助监测、计算机管理自动化结合形成计算机集成制造系统 (CIMS), 综合进行市场预测、产品设计、生产计划、制造和销售等一系列工 作,实现人力、物力和时间等各种资源的有效利用,有效地促进现 代企业生产组织、管理和实现自动化,使企业总效益得到提高。
现代控制理论第1章答案
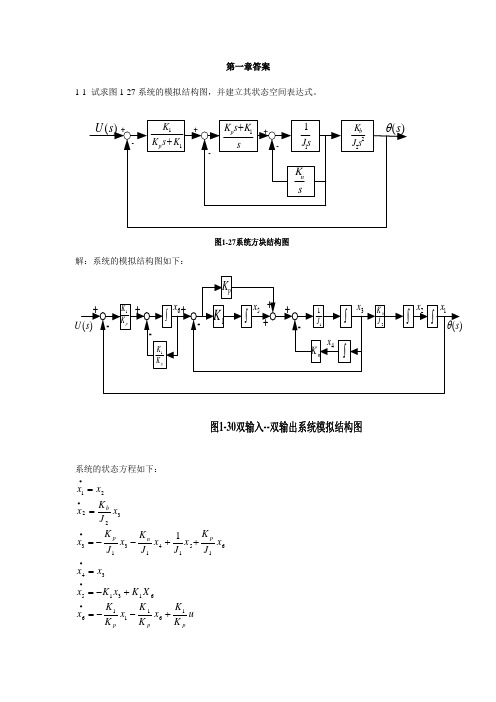
第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
图1-27系统方块结构图解:系统的模拟结构图如下:图1-30双输入--双输出系统模拟结构图系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n pb1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
U图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制工程基础讲稿

与此同时,近代数学的形成和数字计算机的出现为现 代控制理论的建立和发展准备了两个重要的条件。近代 数学为现代控制理论提供了多种多样的分析工具;数字 计算机为现代控制理论发展提供了分析和应用的平台。
第16页,本讲稿共47页
第6页,本讲稿共47页
现代控制工程基础
1.2 控制理论的基本分析设计方法
传统控制理论(经典控制理论、现代控制理论)对问题处理的基本方法和思路是:
建立对象的数学模型,依此分析其性能是否满足控制性能要求,不满足或某 部分不满足时,就用某种方法进行修正补偿或进行综合设计。
研究对象 描述方式 数学工具 分析方法
第17页,本讲稿共47页
现代控制工程基础
4. 罗森布洛克(H.H.Rosenbrock)、欧文斯(D.H.Owens )
和麦克法伦(G.J.MacFarlane)研究了适用于计算机辅 助控制系统设计的 现代频域法理论,将经典控制理论 传递函数的概念推广到多变量系统,并探讨了传递函 数矩阵与状态方程之间的等价转换关系,为进一步建 立统一的线性系统理论奠定了基础。 5. 20世纪70年代奥斯特隆姆(瑞典)和朗道(法国, ndau)在自适应控制理论和应用方面作出了贡 献。此后,关于系统辨识、最优控制、离散时间系统 和自适应控制获得了迅速发展。
第18页,本讲稿共47页
现代控制工程基础
6. 从20世纪70年代末开始,控制理论向着“大系统理论” 、
“智能控制理论”和“复杂系统理论”的方向发展: l 大 系 统 理 论:以控制论和信息论的观点,研究各种
大系统的结构方案、总体设计中的分解方法和协调等问 题的技术基础理论。 l 智能控制理论:研究与模拟人类智能活动及其控制与信 息传递过程的规律,研究具有某些拟人智能 的工程控制 与信息处理系统的理论。 l 复杂系统理论:把系统的研究拓广到开放复杂巨系统的 范筹,以解决复杂系统的控制为目标。
现代控制理论-第1章 基础知识

L[xt ] s2 X s sx0 x0
L[x(n) (t)] sn X (s) sn1x(0) sn2x' (0) sx(n2) (0) x(n1) (0)
(2)积分性质
设:L[x(t)] X (s) ,xi (0)
tr2
r2 !
k1r
e
p1t
n
k jepjt
j r 1
对象)
热电偶
恒温箱自动控制系统功能框图
反馈
反馈是指将输出信号部分或全部返回到输入端
反馈是控制系统的灵魂、思想和立足点
内在反馈、外部反馈、开环与闭环
反馈作用:减少给定环节与被控对象之间的偏差
组成:给定环节、比较环节、放大环节、执行环节、
被控对象、测量反馈环节
扰动
温度t
给定 信号
u1 u
函数X(s)可以展成如下形式:
X (s)
B(s) A(s)
(s
k11 p1)
(s
k 12 p1)
1
k1 k2 (s p1) s p2
kj s pi
kn s pn
k11
lim
s p1
s
p1 r
X
s
绪论
一、工程控制论的研究对象
工程控制论研究的是工程技术中的广义系统,在 一定的外界条件作用下,从系统的初态出发,所 经历的由其内部固有属性所决定的整个动态过程, 研究该过程中输入、输出与系统的关系。
1.广义系统:由相互联系、相互作用的若干部分 构成,达到一定目的或实现一定运动规律的一个 整体。可繁可简、可虚可实。
现代控制理论与工程课件

基本概念。
[例1-1] 观察机器人搬运物体的控制过程,
如图1-1所示。图中为5关节机器人,其中有2个
转动关节,3个摆动关节。末端执行器为一个夹 持器,机器人的任务是通过夹持器抓取A处的物 体,并将其搬运至B处。
图1-1 5关节搬运机器人
为了达到最优控制效果,需要精心设计 合适的过程控制算法,使得搬运物体的速度 最快,而且搬运过程既平稳,定位又准确。 则必然涉及到多变量、耦合和非线性等复杂 的控制问题。传统控制理论通常无法解决如
模型输入输出数据的测量,利用统计方法对系
统的状态进行估计。其中,卡尔曼滤波为典型
的技术,在很多领域得到了广泛应用。
5.自适应控制
自适应控制指得是控制系统能够适应内部
参数变化和外部环境的变化,自动调整控制作
用,使系统达到一定意义下的最优或满足对这
一类系统的控制要求。
6.鲁棒控制 这类控制问题指得是针对系统中存在一定 范围的不确定,设计所谓的鲁棒控制器,使得
变了系统的动态特性,增加了系统的复杂性。
例如,对于电动机转速控制系统,提高输入电
压,电动机转速相应提高,但电动机具有惯性,
响应会出现延迟,所以当提高输入电压时,电
动机的转速并不可能立即有反馈形成的调节作
用。
如果控制系统认为电动机的转速没有提高, 再继续增加输入电压,则有可能超过了希望转
速所对应的输入电压值。电动机在延迟了一段
古典控制理论的广泛应用给人类带来了巨
大的经济和社会效益,同时也导致了自动控制
技术的诞生和发展。最大的成果之一是PID控制 规律的产生,对于无时间延迟的单回路控制系 统很有效,在工业过程控制中仍被广泛应用。
现代控制理论与工程课件

另一方面,对于上述复杂控制问题,应用 古典控制理论很难解决。在这种背景下,现代 控制理论应运而生。而且计算机技术和现代数 学的进步也为现代控制理论的发展提供了有力 的支持。庞德里亚金的极大值原理、贝尔曼的 动态规划和卡尔曼滤波的理论成果,奠定了现 代控制理论的基础。
现代控制理论通常用于解决复杂的被控对 象问题,经过几十年的发展, 它不仅在航空航 天技术上取得了惊人成就,而且在电气、机械、 冶金和化工等领域的应用都得到了巨大的成功。
目前,现代控制理论体系已比较完善, 在不断揭示控制本质规律的同时,也解决 了导弹制导、宇宙航行、交通运输、工业 生产和污染治理控制等各个领域的实际问 题。
与古典控制理论相比,现代控制理论主 要用来解决多输入-多出系统的问题,并且被 控对象可以是线性或非线性系统、定常或时 变系统。现代控制理论是基于时域的状态空 间分析方法,主要实现系统最优控制的研究。 现代控制理论的名称是在1960年召开的美国 自动化大会上正式提出来的。
图1-5 电动机闭环控制系统
闭环控制系统有两个明显的特征: (1) 作用信号按闭环传递; (2) 系统的输出对控制作用有直接影响(有负 反馈的作用)。
图1-6 闭环控制系统
反馈作用可以调节反馈环内的所有环节, 提高控制精度。但实际系统一般都具有质量、 惯性或延迟,是一个动态系统。因此,对于一 定的输入,系统相应的响应或输出往往是振荡 的。而系统的反馈功能有可能加剧这种振荡,
所谓闭环控制系统,是在系统的输入端增加 反馈装置,并与输入参考值进行比较,以二者的 差值对系统进行调节。例1-2就是一个简单的闭环
控制系统。
观察电动机转速控制系统,可采用测速发电 机(输出电压与电动机转速成正比)或旋转编码 器(输出频率与电动机转速成正比)得到电动机 的实际转速,然后与参考输入电压相比较(旋转 编码器通常需要经过频压转换),则可保证电动 机的转速平稳。
现代控制工程第一章

(4)1952年美国MIT的Servomechanism Laboratory 研制出第一台数控机床;
二.控制理论的发展 4. 现代控制(Modern Control) (1950- ) (2)Bellman(1920-1984) 1957年在 RAND公司的支持下 发表著名的Dynamic Programming,建立最优控制 的基础; California大学Los Angle分校数学系教授。仅用三个月就 完成了普林斯顿大学数学系的博士要求。他的工作为决策论 与最优控制奠定了基础,被广泛应用于导弹、航空、航天等 军事和民用工业领域。1979年获得IEEE Medal of Honor。
在博士学位的授予仪式上,执行主席看到他一脸稚气,询问 他的年龄。维纳不愧为数学神童,他的回答十分巧妙:“我 今年岁数的立方是个四位数,岁数的四次方是个六位数,这 两个数,刚好把十个数字0、1、2、3、4、5、6、7、8、9全 都用上了。大家都被他的这道妙题深深地吸引住了,都在议 论他的年龄问题。21的立方是四位数,而22的立方已经是五 位数了,所以维纳的年龄最多是21岁;18的四次方是六位数, 而17的四次方则是五位数了,所以维纳的年龄至少是18岁。 这样,维纳的年龄只可能是18、19、20、21这四个数中的一 个。剩下的工作就是筛选了。20的立方是8000,有3个重复数 字0,不合题意。同理,19的四次方等于130321,21的四次方 等于194481,都不合题意。最后只剩下一个18,是不是正确 答案呢?验算一下,18的立方等于5832,四次方等于104976, 恰好“不重不漏”地用完了十个阿拉伯数字,多么完美的组 合!这个年仅18岁的少年博士,后来果然成就了一番大事业: 他成为信息论的前驱和控制论的奠基人。
二.控制理论的发展 3.经典控制(Classical Control)(1935-1950) (1)美国Bell实验室Bode(1938)(1905-1982),以及 Nyquist(1940)(1889-1976)提出频率响应法;
魏新利-潜心耕耘,,努力创新
魏新利:潜心耕耘,,努力创新他作为一名教学科研一线人员,默默无闻地耕耘在化工教育的三尺讲台上,创新在他热爱的科研领域里,服务在他带领的团队里近三十个春秋。
他就是郑州大学化工与能源学院院长,博士生导师魏新利教授。
全国高等学校教学名师,全国化工系统首批跨世纪优秀拔尖人才,享受国务院政府特殊津贴专家。
兼任“教育部高等学校高职高专能源类专业教学指导委员会”主任委员,“教育部高等学校机械学科教学指导委员会过程装备与控制工程专业教学指导分委员会”委员等职。
开拓创新为节能减排做贡献随着科学技术的进步,地球的资源也面临着枯竭的局面,能源危机、环境恶化,种种问题困扰着人类,魏新利教授对此十分忧心,多年来,他也一直以自己的能力致力解决这样的问题。
魏新利教授有针对性地研发出多项新型、高效、节能的装置,尤其在新型高效节能换热器研发方面更是获得多项专利。
比如研发出的新型换热设备结构紧凑、重量轻、成本低、运行可靠,节省钢材高达40%,其传热效率提高35%,壳程阻能力减少了40%,并且有效防止了因流体诱导震动而引起的断裂、泄漏等故障,使设备寿命延长了不止2~4倍,这项成果荣获了国家科技进步二等奖。
魏新利教授还针对我国冷喂料橡胶挤出水平较低,研发出销钉机筒冷喂料橡胶挤出装置。
该装置结构简单新颖、自动化标准化程度高、维修方便、运转可靠、噪音小、功耗及制造成本低,被推广到数十家企业,取得良好的社会和经济效益。
其挤出机和与之配套的温控装置分别获得中国石化协会科技进步二等奖、河南省科技进步二、三等奖。
二十一世纪,生物油因含硫、氮等有害成分少,被视珍贵的绿色燃料,因此,魏新利教授研发出生物质热解液化装置,该装置由温控加热系统、进料系统、流化床反应系统、旋风分离系统、冷凝收集系统组成。
在实验室阶段取得良好试验效果,获得了两项国家专利。
曾经有材料指出,我国各行业的余热总资源约占其燃料消耗总量的17%~67%,可回收利用的余热资源约为余热总资源的50%,目前我国的余热利用一直处于很低的水平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
授课教师
魏新利 教授 xlwei@ Tel: 13592485516
什么是过程装备与控制?
What is Process Equipment and Control Engineering
过程装备与控制的工业背景 过程装备与控制工程技术的发展简史
人类不可缺失的…..
Indispensable to Human Being
过程装备与控制工程是一门研究和实现上述装 置的重要学科。
现代过程装备与控制工程
“过程装备与控制工程” 技术支撑现在和未来社 会的发展,是人类不可 缺失的技术!
过程工业加工制造流程性材料产品
Process industry manufactures products of processed materials
单元过程设备(如换热器、反应器、塔、储罐等)与 单元过程机器(如压缩机、泵、离心机等)二者统称 为过程装备。
过程装备与控制工程是……
Process Equipment and Control Engineering is ……
Combining math, physics, chemistry and engineering of multidiscipline to solve a wide range of industrial problems in a safe and economical fashion. 结合数、理、化和多领域的工程知识,以安全和经 济的方式解决诸多的工业问题的学科 related to both process manufacture industry and equipment manufacture industry
另一类是以物件的加工和组装为核心的产业,根据机 械电子原理加工零件并装配成产品,但不改变物质的 内在结构,仅改变大小和形状,产品计件不计量,多 为非连续操作,这类工业可统称为为装备制造业。
过程制造业为装备制造业提供原材料,同时装 备制造业为过程制造业提供制造装备
我国过程工业包含的范围
Scope of Chinese process industry
现代过程装备与控制工程
过程装备是能源生产的核心(3小时) 过程装备与化学能源 过程装备与化石能源 过程装备与核能 过程装备与可再生能源
过程装备与高新技术(2小时) 航空、航天 深海探索 生命科技 电子电器 环境保护
现代过程装备与控制工程
过程装备与控制工程的教育(2小时) 本科教育(课程介绍) 研究生教育(包facture definition
按照“技术特征” 可将制造业分为两类:
一类是以物质的化学、物理和生物转化,生成新的物 质产品或转化物质的结构形态,多为流程性材料产品, 产品计量不计件,连续操作,生产环节具有一定的不 可分性,可统称为过程工业(过程制造业),如涉及 化学资源和矿产资源利用的产业(石油化工、冶金) 等;
棉纺印染业
塑料制品业
毛染整业
非金属矿物制造业
丝印染业
黑色金属冶炼及压延加工业
火力发电业
有色金属冶金及压延加工业
煤气生产业
自来水生产业
现代过程装备与控制工程
过程工业是是国家的重要支柱 产业,国家财税收入的主要来源, 其发展状况直接影响国家的经济基 础。在整个制造业中,过程工业的 产值比重接近50%,利税贡献更为 显著,增值税达52%(2001年)。
Modern Process Equipment and Control Engineering
现代过程装备与控制工程
过程装备制造业与社会进步(2小时) 基本过程原理(4 学时)
动量传递过程 传热过程 传质过程 化学反应过程…… 过程装备是物质制造的基础(3小时) 过程装备与化学工业 过程装备与石化工业 过程装备与冶金工业 过程装备与制药工业
社会经济过程中的全部产品通常又可分为四类,即硬 件产品、软件产品、流程性材料产品和服务型产品 (国际标准化组织,ISO/DIS9000:2000)。 所谓“流程性材料”是指以流体(气、液、粉体等) 形态存在的材料。 过程工业是加工制造流程性材料产品的现代制造业。
产业划分
Industrial Definition
人类的全部经济活动可划分为第一次产业、第二次产业和第 三次产业。 在我国第一产业指农业、林业、牧业、渔业等;第二产业指 工业(含矿业、制造业、自来水、电力、建筑业等);第三 产业则指商业、服务业、邮电通讯业、金融保险业及科研、 文教、卫生等行业。 过程工业与矿业、制造业、自来水、电力等国民经济行业直 接相关
按大行业分的过程工业
包含在其他大行业中的过程工业
食品加工业
金属表面处理及热处理业
食品制造业
铸件制造业
造纸及纸制品业
粉末冶金制品业
印刷业
绝缘制品业
石油加工及炼焦业
集成电路制造业(部分生产环节)
化学原料及化学制品业
电子元件制造业(部分生产环节)
医药制造业
烟叶复烤业
化学纤维制造业
纤维原料初步加工业
橡胶制品业
过程装置是流程性材料产品的工作母机
Process unit is the machine tool for products of processed materials
成套过程装置是流程性材料产品的工作母机,它通常 由一系列的过程机器和过程设备,按一定的流程方式 用管道、阀门等连接起来的连续系统,再配以控制仪 表和电子电气设备,即能平稳连续地把以流体为主的 各种材料,让其在装置中历经必要的物理化学过程, 制造出人们需要的新的流程性产品。
在这个世界上,我们可以失去很多东西,但失去其中一 些东西,将大大改变我们生存的方式和含义。我们不妨设 想一下:
如果没有合成氨和尿素装置….我们的粮食会大面积减产,世 界上有大量的人群将因饥饿而死亡; 如果没有炼油装置……我们的汽车将无法出行,飞机将无法 起飞; 如果没有现代锅炉和发电装置……我们的空调、冰箱将无法 使用,城市将处于昏暗之中; 如果没有药物合成装置……人类的平均寿命会大为缩短; 如果没有电子材料的制造装置……先进计算机技术无法实现, 人们不得不靠传话通讯 如果没有先进的制氢装置……