模式识别复习题分解
模式识别复习题分解

模式识别复习题分解《模式识别》试题库⼀、基本概念题1.1 模式识别的三⼤核⼼问题是:、、。
1.2、模式分布为团状时,选⽤聚类算法较好。
1.3 欧式距离具有。
马式距离具有。
(1)平移不变性(2)旋转不变性(3)尺度缩放不变性(4)不受量纲影响的特性1.4 描述模式相似的测度有:。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度1.5 利⽤两类⽅法处理多类问题的技术途径有:(1);(2);(3)。
其中最常⽤的是第个技术途径。
1.6 判别函数的正负和数值⼤⼩在分类中的意义是:,。
1.7 感知器算法。
(1)只适⽤于线性可分的情况;(2)线性可分、不可分都适⽤。
1.8 积累位势函数法的判别界⾯⼀般为。
(1)线性界⾯;(2)⾮线性界⾯。
1.9 基于距离的类别可分性判据有:。
(1)1[]w BTr S S-(2)BWSS(3)BW B+1.10 作为统计判别问题的模式分类,在()情况下,可使⽤聂曼-⽪尔逊判决准则。
1.11 确定性模式⾮线形分类的势函数法中,位势函数K(x,x k)与积累位势函数K(x)的关系为()。
1.12 ⽤作确定性模式⾮线形分类的势函数法,通常,两个n维向量x和x k的函数K(x,x k)若同时满⾜下列三个条件,都可作为势函数。
①();②();③ K(x,x k )是光滑函数,且是x 和x k 之间距离的单调下降函数。
1.13 散度J ij 越⼤,说明ωi 类模式与ωj 类模式的分布()。
当ωi 类模式与ωj 类模式的分布相同时,J ij =()。
1.14 若⽤Parzen 窗法估计模式的类概率密度函数,窗⼝尺⼨h1过⼩可能产⽣的问题是(),h1过⼤可能产⽣的问题是()。
1.15 信息熵可以作为⼀种可分性判据的原因是:。
1.16作为统计判别问题的模式分类,在()条件下,最⼩损失判决规则与最⼩错误判决规则是等价的。
1.17 随机变量l(x ρ)=p( x ρ|ω1)/p( x ρ|ω2),l( x ρ)⼜称似然⽐,则E {l( x ρ)|ω2}=()。
模式识别期末考试题及答案

模式识别期末考试题及答案一、选择题(每题2分,共20分)1. 以下哪一项不是模式识别的主要任务?A. 分类B. 回归C. 聚类D. 预测答案:B2. 以下哪一种方法不属于统计模式识别方法?A. 最小二乘法B. 感知机C. 支持向量机D. 决策树答案:A3. 在模式识别中,以下哪种技术用于降低特征维度?A. 主成分分析(PCA)B. 线性判别分析(LDA)C. 神经网络D. K-均值聚类答案:A4. 以下哪一种模式识别方法适用于非线性问题?A. 线性判别分析(LDA)B. 支持向量机(SVM)C. 主成分分析(PCA)D. K-最近邻(K-NN)答案:B5. 以下哪一项不是模式识别的评价指标?A. 准确率B. 精确率C. 召回率D. 信息熵答案:D二、填空题(每题2分,共20分)6. 模式识别的主要任务包括分类、回归、聚类和________。
答案:预测7. 统计模式识别方法包括最小二乘法、感知机、________和决策树。
答案:支持向量机8. 主成分分析(PCA)的主要目的是________特征。
答案:降低维度9. 在模式识别中,________用于将样本分为不同的类别。
答案:分类器10. 支持向量机(SVM)的基本思想是找到一个________,使得不同类别的样本之间的间隔最大化。
答案:最优分割超平面三、简答题(每题10分,共30分)11. 请简述模式识别的主要步骤。
答案:(1)数据预处理:对原始数据进行清洗、标准化和降维等处理。
(2)特征提取:从原始数据中提取有助于分类的特征。
(3)模型训练:使用训练集对分类器进行训练。
(4)模型评估:使用测试集对分类器的性能进行评估。
(5)模型优化:根据评估结果对模型进行调整和优化。
12. 请简述支持向量机(SVM)的基本原理。
支持向量机是一种二分类模型,其基本思想是找到一个最优分割超平面,使得不同类别的样本之间的间隔最大化。
SVM通过求解一个凸二次规划问题来寻找最优分割超平面,从而实现分类任务。
大学模式识别考试题及答案详解

一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类 (2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2) (3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A?01, A? 0A1 , A? 1A0 , B?BA , B? 0}, A)(2)({A}, {0, 1}, {A?0, A? 0A}, A)(3)({S}, {a, b}, {S ? 00S, S ? 11S, S ? 00, S ? 11}, S)(4)({A}, {0, 1}, {A?01, A? 0A1, A? 1A0}, A)二、(15分)简答及证明题(1)影响聚类结果的主要因素有那些?(2)证明马氏距离是平移不变的、非奇异线性变换不变的。
答:(1)分类准则,模式相似性测度,特征量的选择,量纲。
(2)证明:(2分)(2分)(1分)设,有非奇异线性变换:(1分)(4分)三、(8分)说明线性判别函数的正负和数值大小在分类中的意义并证明之。
答:(1)(4分)的绝对值正比于到超平面的距离平面的方程可以写成式中。
模式识别习题集答案解析

模式识别习题集答案解析1、PCA和LDA的区别?PCA是⼀种⽆监督的映射⽅法,LDA是⼀种有监督的映射⽅法。
PCA只是将整组数据映射到最⽅便表⽰这组数据的坐标轴上,映射时没有利⽤任何数据部的分类信息。
因此,虽然做了PCA后,整组数据在表⽰上更加⽅便(降低了维数并将信息损失降到了最低),但在分类上也许会变得更加困难;LDA在增加了分类信息之后,将输⼊映射到了另外⼀个坐标轴上,有了这样⼀个映射,数据之间就变得更易区分了(在低纬上就可以区分,减少了很⼤的运算量),它的⽬标是使得类别的点距离越近越好,类别间的点越远越好。
2、最⼤似然估计和贝叶斯⽅法的区别?p(x|X)是概率密度函数,X是给定的训练样本的集合,在哪种情况下,贝叶斯估计接近最⼤似然估计?最⼤似然估计把待估的参数看做是确定性的量,只是其取值未知。
利⽤已知的样本结果,反推最有可能(最⼤概率)导致这样结果的参数值(模型已知,参数未知)。
贝叶斯估计则是把待估计的参数看成是符合某种先验概率分布的随机变量。
对样本进⾏观测的过程,把先验概率密度转化为后验概率密度,利⽤样本的信息修正了对参数的初始估计值。
当训练样本数量趋于⽆穷的时候,贝叶斯⽅法将接近最⼤似然估计。
如果有⾮常多的训练样本,使得p(x|X)形成⼀个⾮常显著的尖峰,⽽先验概率p(x)⼜是均匀分布,此时两者的本质是相同的。
3、为什么模拟退⽕能够逃脱局部极⼩值?在解空间随机搜索,遇到较优解就接受,遇到较差解就按⼀定的概率决定是否接受,这个概率随时间的变化⽽降低。
实际上模拟退⽕算法也是贪⼼算法,只不过它在这个基础上增加了随机因素。
这个随机因素就是:以⼀定的概率来接受⼀个⽐单前解要差的解。
通过这个随机因素使得算法有可能跳出这个局部最优解。
4、最⼩错误率和最⼩贝叶斯风险之间的关系?基于最⼩风险的贝叶斯决策就是基于最⼩错误率的贝叶斯决策,换⾔之,可以把基于最⼩错误率决策看做是基于最⼩风险决策的⼀个特例,基于最⼩风险决策本质上就是对基于最⼩错误率公式的加权处理。
模式识别复习资料答案

一、感知器算法流程图:二、矩阵分解的方法:所谓矩阵分解,就是将一个矩阵写成结构比较简单的或性质比较熟悉的另一些矩阵的乘积。
其分解的方法有很多种,常用的有三角分解、QR 分解、奇异值分解。
三角分解定义:如果方阵A 可分解成一个下三角形矩阵L 和上三角形矩阵U 的的乘积,则称A 可作三角分解或LU 分解。
QR 分解(正交分解)定义:如果实(复)非奇异矩阵A 能化成正交(酉)矩阵Q 与实(复)非奇异上三角矩阵R 的乘积,即A=QR ,则称上式为A 的QR 分解。
奇异值分解定理:设A 是一个m n ⨯的矩阵, 且()r A r =,则存在m 阶酉矩阵U 和n 阶酉矩阵V ,使得000H U AV ⎛⎫⎪= ⎪ ⎪⎝⎭∑ (2), 其中,1()rdiag σσ=∑L ,且120r σσσ≥≥≥≥L 。
由(2)知000H A U V ⎛⎫⎪= ⎪ ⎪⎝⎭∑ (3), 该式称为A 的奇异值分解,(1,2,)i i r σ=L ,称为A 的奇异值,U 的第i 列称为A 对应i σ的左奇异向量,V 的第i 列称为A 对应的i σ右奇异向量。
三、非负矩阵分解:在NMF 中要求原始的矩阵V 的所有元素的均是非负的,那么矩阵V 可以分解为两个更小的非负矩阵的乘积,这个矩阵V 有且仅有一个这样的分解,即满足存在性和唯一性。
分解方法:已知数据举矩阵V 和所能忍受的误差e ,求非负分解矩阵W ,H 。
(1) 随机初始化矩阵,要求非负;(2) 应用迭代公式进行迭代。
如果噪声服从高斯分布,则根据式()()Tik ik ikTikVH W W WHH ←g和式()()T kjkj kj TkjW V H H W WH ←g进行,如果噪声服从Poisson 分布,则根据式()kj ijij jik ik kjjH VWH W W H⎡⎤⎣⎦←∑∑g和 ()ik ikijikj kjik iW V WH H H W⎡⎤⎣⎦←∑∑g进行;(3)当||||V WH -误差小于e 时,或者达到最大迭代次数时,停止迭代。
大学模式识别考试题及答案详解

大学模式识别考试题及答案详解Document number:PBGCG-0857-BTDO-0089-PTT1998一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类 (2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2) (3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A?01, A? 0A1 , A? 1A0 , B?BA , B? 0}, A)(2)({A}, {0, 1}, {A?0, A? 0A}, A)(3)({S}, {a, b}, {S ? 00S, S ? 11S, S ? 00, S ? 11}, S)(4)({A}, {0, 1}, {A?01, A? 0A1, A? 1A0}, A)二、(15分)简答及证明题(1)影响聚类结果的主要因素有那些?(2)证明马氏距离是平移不变的、非奇异线性变换不变的。
答:(1)分类准则,模式相似性测度,特征量的选择,量纲。
(2)证明:(2分)(2分)(1分)设,有非奇异线性变换:(1分)(4分)三、(8分)说明线性判别函数的正负和数值大小在分类中的意义并证明之。
模式识别期末试题及答案
模式识别期末试题及答案正文:模式识别期末试题及答案1. 选择题1.1 下列关于机器学习的说法中,正确的是:A. 机器学习是一种人工智能的应用领域B. 机器学习只能应用于结构化数据C. 机器学习不需要预先定义规则D. 机器学习只能处理监督学习问题答案:A1.2 在监督学习中,以下哪个选项描述了正确的训练过程?A. 通过输入特征和预期输出,训练一个模型来进行预测B. 通过输入特征和可能的输出,训练一个模型来进行预测C. 通过输入特征和无标签的数据,训练一个模型来进行预测D. 通过输入特征和已有标签的数据,训练一个模型来进行分类答案:D2. 简答题2.1 请解释什么是模式识别?模式识别是指在给定一组输入数据的情况下,通过学习和建模,识别和分类输入数据中的模式或规律。
通过模式识别算法,我们可以从数据中提取重要的特征,并根据这些特征进行分类、聚类或预测等任务。
2.2 请解释监督学习和无监督学习的区别。
监督学习是一种机器学习方法,其中训练数据包含了输入特征和对应的标签或输出。
通过给算法提供已知输入和输出的训练样本,监督学习的目标是学习一个函数,将新的输入映射到正确的输出。
而无监督学习则没有标签或输出信息。
无监督学习的目标是从未标记的数据中找到模式和结构。
这种学习方法通常用于聚类、降维和异常检测等任务。
3. 计算题3.1 请计算以下数据集的平均值:[2, 4, 6, 8, 10]答案:63.2 请计算以下数据集的标准差:[1, 3, 5, 7, 9]答案:2.834. 综合题4.1 对于一个二分类问题,我们可以使用逻辑回归模型进行预测。
请简要解释逻辑回归模型的原理,并说明它适用的场景。
逻辑回归模型是一种用于解决二分类问题的监督学习算法。
其基本原理是通过将特征的线性组合传递给一个非线性函数(称为sigmoid函数),将实数值映射到[0,1]之间的概率。
这个映射的概率可以被解释为某个样本属于正类的概率。
逻辑回归适用于需要估计二分类问题的概率的场景,例如垃圾邮件分类、欺诈检测等。
大学模式识别考试题及答案详解
大学模式识别考试题及答案详解Last revision on 21 December 2020一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类 (2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2) (3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A01, A 0A1 , A 1A0 , B BA , B 0}, A)(2)({A}, {0, 1}, {A0, A 0A}, A)(3)({S}, {a, b}, {S 00S, S 11S, S 00, S 11}, S)(4)({A}, {0, 1}, {A01, A 0A1, A 1A0}, A)二、(15分)简答及证明题(1)影响聚类结果的主要因素有那些(2)证明马氏距离是平移不变的、非奇异线性变换不变的。
答:(1)分类准则,模式相似性测度,特征量的选择,量纲。
(2)证明:(2分)(2分)(1分)设,有非奇异线性变换:(1分)(4分)三、(8分)说明线性判别函数的正负和数值大小在分类中的意义并证明之。
中科院-模式识别考题总结(详细答案)

1.简述模式的概念及其直观特性,模式识别的分类,有哪几种方法。
(6’)答(1):什么是模式?广义地说,存在于时间和空间中可观察的物体,如果我们可以区别它们是否相同或是否相似,都可以称之为模式。
模式所指的不是事物本身,而是从事物获得的信息,因此,模式往往表现为具有时间和空间分布的信息。
模式的直观特性:可观察性;可区分性;相似性。
答(2):模式识别的分类:假说的两种获得方法(模式识别进行学习的两种方法):●监督学习、概念驱动或归纳假说;●非监督学习、数据驱动或演绎假说。
模式分类的主要方法:●数据聚类:用某种相似性度量的方法将原始数据组织成有意义的和有用的各种数据集。
是一种非监督学习的方法,解决方案是数据驱动的。
●统计分类:基于概率统计模型得到各类别的特征向量的分布,以取得分类的方法。
特征向量分布的获得是基于一个类别已知的训练样本集。
是一种监督分类的方法,分类器是概念驱动的。
●结构模式识别:该方法通过考虑识别对象的各部分之间的联系来达到识别分类的目的。
(句法模式识别)●神经网络:由一系列互相联系的、相同的单元(神经元)组成。
相互间的联系可以在不同的神经元之间传递增强或抑制信号。
增强或抑制是通过调整神经元相互间联系的权重系数来(weight)实现。
神经网络可以实现监督和非监督学习条件下的分类。
2.什么是神经网络?有什么主要特点?选择神经网络模式应该考虑什么因素?(8’)答(1):所谓人工神经网络就是基于模仿生物大脑的结构和功能而构成的一种信息处理系统(计算机)。
由于我们建立的信息处理系统实际上是模仿生理神经网络,因此称它为人工神经网络。
这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。
人工神经网络的两种操作过程:训练学习、正常操作(回忆操作)。
答(2):人工神经网络的特点:●固有的并行结构和并行处理;●知识的分布存储;●有较强的容错性;●有一定的自适应性;人工神经网络的局限性:●人工神经网络不适于高精度的计算;●人工神经网络不适于做类似顺序计数的工作;●人工神经网络的学习和训练往往是一个艰难的过程;●人工神经网络必须克服时间域顺序处理方面的困难;●硬件限制;●正确的训练数据的收集。
大学模式识别考试题及答案详解完整版

大学模式识别考试题及答案详解HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类 (2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2) (3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A01, A 0A1 , A 1A0 , B BA , B 0}, A)(2)({A}, {0, 1}, {A0, A 0A}, A)(3)({S}, {a, b}, {S 00S, S 11S, S 00, S 11}, S)(4)({A}, {0, 1}, {A01, A 0A1, A 1A0}, A)二、(15分)简答及证明题(1)影响聚类结果的主要因素有那些?(2)证明马氏距离是平移不变的、非奇异线性变换不变的。
答:(1)分类准则,模式相似性测度,特征量的选择,量纲。
(2)证明:(2分)(2分)(1分)设,有非奇异线性变换:(1分)(4分)三、(8分)说明线性判别函数的正负和数值大小在分类中的意义并证明之。
模式识别习题解答第三章

题1:在一个10类的模式识别问题中,有3类单独满足多类情况1,其余的类别满足多类情况2。
问该模式识别问题所需判别函数的最少数目是多少?答:将10类问题可看作4类满足多类情况1的问题,可将3类单独满足多类情况1的类找出来,剩下的7类全部划到4类中剩下的一个子类中。
再在此子类中,运用多类情况2的判别法则进行分类,此时需要7*(7-1)/2=21个判别函数。
故共需要4+21=25个判别函数。
题2:一个三类问题,其判别函数如下:d1(x)=-x1, d2(x)=x1+x2-1, d3(x)=x1-x2-11.设这些函数是在多类情况1条件下确定的,绘出其判别界面和每一个模式类别的区域。
2.设为多类情况2,并使:d12(x)= d1(x), d13(x)= d2(x), d23(x)= d3(x)。
绘出其判别界面和多类情况2的区域。
3.设d1(x), d2(x)和d3(x)是在多类情况3的条件下确定的,绘出其判别界面和每类的区域。
答:三种情况分别如下图所示:1.2.3.题3:两类模式,每类包括5个3维不同的模式,且良好分布。
如果它们是线性可分的,问权向量至少需要几个系数分量?假如要建立二次的多项式判别函数,又至少需要几个系数分量?(设模式的良好分布不因模式变化而改变。
)答:(1)若是线性可分的,则权向量至少需要14N n =+=个系数分量; (2)若要建立二次的多项式判别函数,则至少需要5!102!3!N ==个系数分量。
题4:用感知器算法求下列模式分类的解向量w : ω1: {(0 0 0)T, (1 0 0)T, (1 0 1)T, (1 1 0)T} ω2: {(0 0 1)T, (0 1 1)T, (0 1 0)T, (1 1 1)T}解:将属于2w 的训练样本乘以(1)-,并写成增广向量的形式x1=[0 0 0 1]',x2=[1 0 0 1]',x3=[1 0 1 1]',x4=[1 1 0 1]';x5=[0 0 -1 -1]',x6=[0 -1 -1 -1]',x7=[0 -1 0 -1]',x8=[-1 -1 -1 -1]';迭代选取1C =,(1)(0,0,0,0)w '=,则迭代过程中权向量w 变化如下:(2)(0 0 0 1)w '=;(3)(0 0 -1 0)w '=;(4)(0 -1 -1 -1)w '=;(5)(0 -1 -1 0)w '=;(6)(1 -1 -1 1)w '=;(7)(1 -1 -2 0)w '=;(8)(1 -1 -2 1)w '=;(9)(2 -1 -1 2)w '=; (10)(2 -1 -2 1)w '=;(11)(2 -2 -2 0)w '=;(12)(2 -2 -2 1)w '=;收敛所以最终得到解向量(2 -2 -2 1)w '=,相应的判别函数为123()2221d x x x x =--+。
模式识别复习题
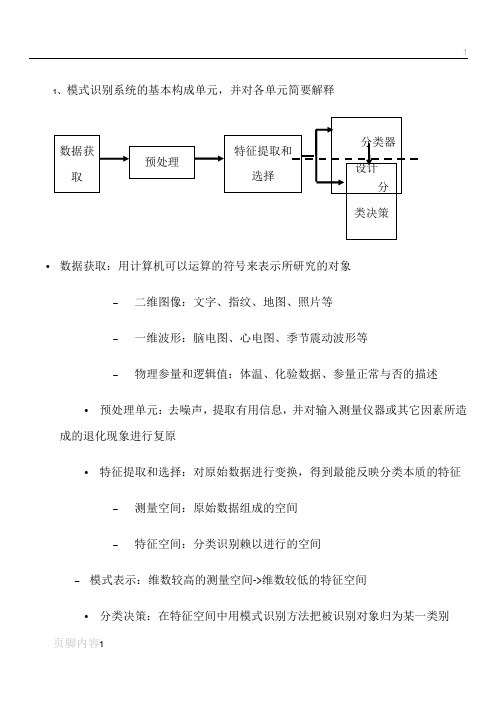
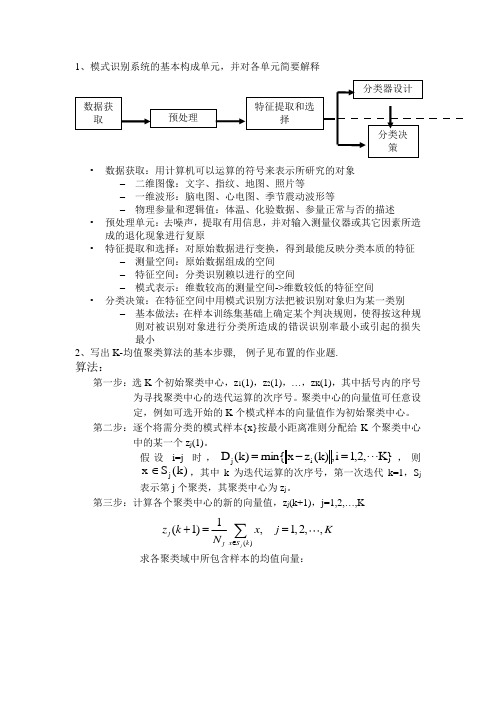
1、模式识别系统的基本构成单元,并对各单元简要解释•数据获取:用计算机可以运算的符号来表示所研究的对象–二维图像:文字、指纹、地图、照片等–一维波形:脑电图、心电图、季节震动波形等–物理参量和逻辑值:体温、化验数据、参量正常与否的描述•预处理单元:去噪声,提取有用信息,并对输入测量仪器或其它因素所造成的退化现象进行复原•特征提取和选择:对原始数据进行变换,得到最能反映分类本质的特征–测量空间:原始数据组成的空间–特征空间:分类识别赖以进行的空间–模式表示:维数较高的测量空间->维数较低的特征空间•分类决策:在特征空间中用模式识别方法把被识别对象归为某一类别–基本做法:在样本训练集基础上确定某个判决规则,使得按这种规则对被识别对象进行分类所造成的错误识别率最小或引起的损失最小2、写出K-均值聚类算法的基本步骤, 例子见布置的作业题.算法:第一步:选K 个初始聚类中心,z 1(1),z 2(1),…,z K (1),其中括号内的序号为寻找聚类中心的迭代运算的次序号。
聚类中心的向量值可任意设定,例如可选开始的K 个模式样本的向量值作为初始聚类中心。
第二步:逐个将需分类的模式样本{x}按最小距离准则分配给K 个聚类中心中的某一个z j (1)。
假设i=j 时,}K ,2,1i ,)k (z x min{)k (D i j =-=,则)k (S x j ∈,其中k 为迭代运算的次序号,第一次迭代k=1,S j 表示第j 个聚类,其聚类中心为z j 。
第三步:计算各个聚类中心的新的向量值,z j (k+1),j=1,2,…,K求各聚类域中所包含样本的均值向量:其中N j 为第j 个聚类域S j 中所包含的样本个数。
以均值向量作为新的聚类中心,可使如下聚类准则函数最小:在这一步中要分别计算K 个聚类中的样本均值向量,所以称之为K-均值算法。
第四步:若)k (z )1k (z j j ≠+,j=1,2,…,K ,则返回第二步,将模式样本逐个重新分类,重复迭代运算; 若)k (z )1k (z j j =+,j=1,2,…,K ,则算法收敛,计算结束。
模式识别期末考试题及答案

模式识别期末考试题及答案一、填空题1. 模式识别是研究通过_________从观测数据中自动识别和分类模式的一种学科。
答案:计算机算法2. 在模式识别中,特征选择的主要目的是_________。
答案:降低数据的维度3. 支持向量机(SVM)的基本思想是找到一个最优的超平面,使得两类数据的_________最大化。
答案:间隔4. 主成分分析(PCA)是一种_________方法,用于降低数据的维度。
答案:线性降维5. 隐马尔可夫模型(HMM)是一种用于处理_________数据的统计模型。
答案:时序二、选择题6. 以下哪种方法不属于模式识别的监督学习方法?()A. 线性判别分析B. 支持向量机C. 神经网络D. K-means聚类答案:D7. 在以下哪种情况下,可以使用主成分分析(PCA)进行特征降维?()A. 数据维度较高,且特征之间存在线性关系B. 数据维度较高,且特征之间存在非线性关系C. 数据维度较低,且特征之间存在线性关系D. 数据维度较低,且特征之间存在非线性关系答案:A8. 以下哪个算法不属于聚类算法?()A. K-meansB. 层次聚类C. 判别分析D. 密度聚类答案:C三、判断题9. 模式识别的目的是将输入数据映射到事先定义的类别中。
()答案:正确10. 在模式识别中,特征提取和特征选择是两个不同的概念,其中特征提取是将原始特征转换为新的特征,而特征选择是从原始特征中筛选出有用的特征。
()答案:正确四、简答题11. 简述模式识别的主要任务。
答案:模式识别的主要任务包括:分类、回归、聚类、异常检测等。
其中,分类和回归任务属于监督学习,聚类和异常检测任务属于无监督学习。
12. 简述支持向量机(SVM)的基本原理。
答案:支持向量机的基本原理是找到一个最优的超平面,使得两类数据的间隔最大化。
具体来说,SVM通过求解一个凸二次规划问题来确定最优超平面,使得训练数据中的正类和负类数据点尽可能远离这个超平面。
模式识别复习题1

模式识别 复习题1. 简单描述模式识别系统的基本构成(典型过程)?2. 什么是监督模式识别(学习)?什么是非监督模式识别(学习)? 对一副道路图像,希望把道路部分划分出来,可以采用以下两种方法: (1). 在该图像中分别在道路部分与非道路部分画出一个窗口,把在这两个窗口中的象素数据作为训练集,用某种判别准则求得分类器参数,再用该分类器对整幅图进行分类。
(2).将整幅图的每个象素的属性记录在一张数据表中,然后用某种方法将这些数据按它们的自然分布状况划分成两类。
因此每个象素就分别得到相应的类别号,从而实现了道路图像的分割。
试问以上两种方法哪一种是监督学习,哪个是非监督学习?3. 给出一个模式识别的例子。
4. 应用贝叶斯决策的条件是什么?列出几种常用的贝叶斯决策规则,并简单说明其规则.5. 分别写出在以下两种情况:(1)12(|)(|)P x P x ωω=;(2)12()()P P ωω=下的最小错误率贝叶斯决策规则。
6. (教材P 17 例2.1)7. (教材P20 例2.2),并说明一下最小风险贝叶斯决策和最小错误率贝叶斯决策的关系。
8. 设在一维特征空间中有两类服从正态分布的样本,12122,1,3,σσμμ====两类先验概率之比12(),()P e P ωω= 试确定按照最小错误率贝叶斯决策规则的决策分界面的x 值。
9. 设12{,,...,}N x x x =X 为来自点二项分布的样本集,即1(,),0,1,01,1x x f x P P Q x P Q P -==≤≤=-,试求参数P 的最大似然估计量ˆP。
10. 假设损失函数为二次函数2ˆˆ(,)()PP P P λ=-,P 的先验密度为均匀分布,即()1,01f P P =≤≤。
在这样的假设条件下,求上题中的贝叶斯估计量ˆP。
11. 设12{,,...,}N x x x =X 为来自(|)p x θ的随机样本,其中0x θ≤≤时,1(|)p x θθ=,否则为0。
模式识别习题及答案

第一章 绪论1.什么是模式?具体事物所具有的信息。
模式所指的不是事物本身,而是我们从事物中获得的___信息__。
2.模式识别的定义?让计算机来判断事物。
3.模式识别系统主要由哪些部分组成?数据获取—预处理—特征提取与选择—分类器设计/ 分类决策。
第二章 贝叶斯决策理论1.最小错误率贝叶斯决策过程? 答:已知先验概率,类条件概率。
利用贝叶斯公式得到后验概率。
根据后验概率大小进行决策分析。
2.最小错误率贝叶斯分类器设计过程?答:根据训练数据求出先验概率类条件概率分布 利用贝叶斯公式得到后验概率如果输入待测样本X ,计算X 的后验概率根据后验概率大小进行分类决策分析。
3.最小错误率贝叶斯决策规则有哪几种常用的表示形式? 答:4.贝叶斯决策为什么称为最小错误率贝叶斯决策?答:最小错误率Bayes 决策使得每个观测值下的条件错误率最小因而保证了(平均)错误率 最小。
Bayes 决策是最优决策:即,能使决策错误率最小。
5.贝叶斯决策是由先验概率和(类条件概率)概率,推导(后验概率)概率,然后利用这个概率进行决策。
6.利用乘法法则和全概率公式证明贝叶斯公式答:∑====mj Aj p Aj B p B p A p A B p B p B A p AB p 1)()|()()()|()()|()(所以推出贝叶斯公式7.朴素贝叶斯方法的条件独立假设是(P(x| ωi) =P(x1, x2, …, xn | ωi)⎩⎨⎧∈>=<211221_,)(/)(_)|()|()(w w x w p w p w x p w x p x l 则如果∑==21)()|()()|()|(j j j i i i w P w x P w P w x P x w P 2,1),(=i w P i 2,1),|(=i w x p i ∑==21)()|()()|()|(j j j i i i w P w x P w P w x P x w P ∑===Mj j j i i i i i A P A B P A P A B P B P A P A B P B A P 1)()|()()|()()()|()|(= P(x1| ωi) P(x2| ωi)… P(xn| ωi))8.怎样利用朴素贝叶斯方法获得各个属性的类条件概率分布?答:假设各属性独立,P(x| ωi) =P(x1, x2, …, xn | ωi) = P(x1| ωi) P(x2| ωi)… P(xn| ωi) 后验概率:P(ωi|x) = P(ωi) P(x1| ωi) P(x2| ωi)… P(xn| ωi)类别清晰的直接分类算,如果是数据连续的,假设属性服从正态分布,算出每个类的均值方差,最后得到类条件概率分布。
模式识别试题及总结.doc

《模式识别》试卷( A)一、填空与选择填空(本题答案写在此试卷上,30 分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类(2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1 二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2)(3)(4)6、Fisher 线性判别函数的求解过程是将N 维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A 01, A0A1 ,A1A0 , B BA , B0}, A)(2)({A}, {0, 1}, {A 0, A0A}, A)(3)({S}, {a, b}, {S 00S, S11S, S00, S11},S)(4)({A}, {0, 1}, {A 01, A0A1, A1A0}, A)9、影响层次聚类算法结果的主要因素有(计算模式距离的测度、(聚类准则、类间距离门限、预定的类别数目))。
10、欧式距离具有(1、 2);马式距离具有(1、2、3、 4)。
(1)平移不变性( 2)旋转不变性( 3)尺度缩放不变性( 4)不受量纲影响的特性11、线性判别函数的正负和数值大小的几何意义是(正(负)表示样本点位于判别界面法向量指向的正(负)半空间中;绝对值正比于样本点到判别界面的距离。
模式识别复习题
1、模式识别系统的基本构成单元,并对各单元简要解释• 数据获取:用计算机可以运算的符号来表示所研究的对象– 二维图像:文字、指纹、地图、照片等– 一维波形:脑电图、心电图、季节震动波形等– 物理参量和逻辑值:体温、化验数据、参量正常与否的描述• 预处理单元:去噪声,提取有用信息,并对输入测量仪器或其它因素所造成的退化现象进行复原• 特征提取和选择:对原始数据进行变换,得到最能反映分类本质的特征– 测量空间:原始数据组成的空间 – 特征空间:分类识别赖以进行的空间– 模式表示:维数较高的测量空间->维数较低的特征空间• 分类决策:在特征空间中用模式识别方法把被识别对象归为某一类别– 基本做法:在样本训练集基础上确定某个判决规则,使得按这种规则对被识别对象进行分类所造成的错误识别率最小或引起的损失最小2、写出K-均值聚类算法的基本步骤, 例子见布置的作业题.算法:第一步:选K 个初始聚类中心,z 1(1),z 2(1),…,z K (1),其中括号内的序号为寻找聚类中心的迭代运算的次序号。
聚类中心的向量值可任意设定,例如可选开始的K 个模式样本的向量值作为初始聚类中心。
第二步:逐个将需分类的模式样本{x}按最小距离准则分配给K 个聚类中心中的某一个z j (1)。
假设i=j 时,}K ,2,1i ,)k (z x min{)k (D i j =-=,则)k (S x j ∈,其中k 为迭代运算的次序号,第一次迭代k=1,S j 表示第j 个聚类,其聚类中心为z j 。
第三步:计算各个聚类中心的新的向量值,z j (k+1),j=1,2,…,K求各聚类域中所包含样本的均值向量:()1(1),1,2,,j j x S k jz k x j KN ∈+==∑其中N j 为第j 个聚类域S j 中所包含的样本个数。
以均值向量作为新的聚类中心,可使如下聚类准则函数最小:在这一步中要分别计算K 个聚类中的样本均值向量,所以称之为K-均值算法。
模式识别试题及总结
一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类(2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2)(3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A01, A 0A1 , A 1A0 , B BA , B 0}, A)(2)({A}, {0, 1}, {A0, A 0A}, A)(3)({S}, {a, b}, {S 00S, S 11S, S 00, S 11}, S)(4)({A}, {0, 1}, {A01, A 0A1, A 1A0}, A)9、影响层次聚类算法结果的主要因素有(计算模式距离的测度、(聚类准则、类间距离门限、预定的类别数目))。
10、欧式距离具有(1、2 );马式距离具有(1、2、3、4 )。
(1)平移不变性(2)旋转不变性(3)尺度缩放不变性(4)不受量纲影响的特性11、线性判别函数的正负和数值大小的几何意义是(正(负)表示样本点位于判别界面法向量指向的正(负)半空间中;绝对值正比于样本点到判别界面的距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《模式识别》试题库一、基本概念题1.1 模式识别的三大核心问题是:、、。
1.2、模式分布为团状时,选用聚类算法较好。
1.3 欧式距离具有。
马式距离具有。
(1)平移不变性(2)旋转不变性(3)尺度缩放不变性(4)不受量纲影响的特性1.4 描述模式相似的测度有:。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度1.5 利用两类方法处理多类问题的技术途径有:(1);(2);(3)。
其中最常用的是第个技术途径。
1.6 判别函数的正负和数值大小在分类中的意义是:,。
1.7 感知器算法。
(1)只适用于线性可分的情况;(2)线性可分、不可分都适用。
1.8 积累位势函数法的判别界面一般为。
(1)线性界面;(2)非线性界面。
1.9 基于距离的类别可分性判据有:。
(1)1[]w BTr S S-(2)BWSS(3)BW BSS S+1.10 作为统计判别问题的模式分类,在()情况下,可使用聂曼-皮尔逊判决准则。
1.11 确定性模式非线形分类的势函数法中,位势函数K(x,x k)与积累位势函数K(x)的关系为()。
1.12 用作确定性模式非线形分类的势函数法,通常,两个n维向量x和x k的函数K(x,x k)若同时满足下列三个条件,都可作为势函数。
①();②( ); ③ K(x,x k )是光滑函数,且是x 和x k 之间距离的单调下降函数。
1.13 散度J ij 越大,说明ωi 类模式与ωj 类模式的分布( )。
当ωi 类模式与ωj 类模式的分布相同时,J ij =( )。
1.14 若用Parzen 窗法估计模式的类概率密度函数,窗口尺寸h1过小可能产生的问题是( ),h1过大可能产生的问题是( )。
1.15 信息熵可以作为一种可分性判据的原因是: 。
1.16作为统计判别问题的模式分类,在( )条件下,最小损失判决规则与最小错误判决规则是等价的。
1.17 随机变量l(x )=p( x |ω1)/p( x |ω2),l( x )又称似然比,则E {l( x )|ω2}=( )。
在最小误判概率准则下,对数似然比Bayes 判决规则为( )。
1.18 影响类概率密度估计质量的最重要因素是( )。
1.19 基于熵的可分性判据定义为)]|(log )|([1x P x P E J i ci i x Hωω∑=-=,J H 越( ),说明模式的可分性越强。
当P(ωi | x ) =( )(i=1,2,…,c)时,J H 取极大值。
1.20 Kn 近邻元法较之于Parzen 窗法的优势在于( )。
上述两种算法的共同弱点主要是( )。
1.21 已知有限状态自动机Af=(∑,Q ,δ,q0,F),∑={0,1};Q={q0,q1};δ:δ(q0,0)= q1,δ(q0,1)= q1,δ(q1,0)=q0,δ(q1,1)=q0;q0=q0;F={q0}。
现有输入字符串:(a) 00011101011,(b) 1100110011,(c) 101100111000,(d)0010011,试问,用Af 对上述字符串进行分类的结果为( )。
1.22 句法模式识别中模式描述方法有: 。
(1)符号串 (2)树 (3)图 (4)特征向量1.23设集合X={a,b,c,d }上的关系,R={(a,a),(a,b),(a,d),(b,b),(b,a),(b,d),(c,c),(d,d),(d,a),(d,b)},则a,b,c,d 生成的R 等价类分别为 ( [a]R= ,[b]R= ,[c]R= ,[d]R= )。
1.24 如果集合X 上的关系R 是传递的、( )和( )的,则称R 是一个等价关系。
1.25一个模式识别系统由那几部分组成?画出其原理框图。
1.26 统计模式识别中,模式是如何描述的。
1.27 简述随机矢量之间的统计关系:不相关,正交,独立的定义及它们之间的关系。
1.28 试证明,对于正态分布,不相关与独立是等价的。
1.29 试证明,多元正态随机矢量的线性变换仍为多元正态随机矢量。
1.30 试证明,多元正态随机矢量X的分量的线性组合是一正态随机变量。
第二部分 分析、证明、计算题 第二章 聚类分析2.1 影响聚类结果的主要因素有那些? 2.2 马氏距离有那些优点?2.3 如果各模式类呈现链状分布,衡量其类间距离用最小距离还是用最大距离?为什么?2.4 动态聚类算法较之于简单聚类算法的改进之处何在?层次聚类算法是动态聚类算法吗?比较层次聚类算法与c-均值算法的优劣。
2.5 ISODATA 算法较之于c-均值算法的优势何在? 2.6 简述最小张树算法的优点。
2.7 证明马氏距离是平移不变的、非奇异线性变换不变的。
2.8 设,类p ω、 q ω的重心分别为 p x 、 q x,它们分别有样本 p n 、 q n 个。
将和 q ω合并为 l ω,则 lω有 q p l n n n +=个样本。
另一类 k ω的重心为 k x。
试证明 k ω与 l ω的距离平方是2222pqlk q p kq lk q kp lk p kl D n n n n D n n n D n n n D +-+++=2.9 (1)设有M 类模式ωi ,i=1,2,...,M ,试证明总体散布矩阵S T 是总类内散布矩阵S W 与类间散布矩阵S B 之和,即S T =S W +S B 。
(2)设有二维样本:x1=(-1,0)T,x2=(0,-1)T,x3=(0,0)T,x4=(2,0)T和x5=(0,2)T。
试选用一种合适的方法进行一维特征特征提取y i= W T x i。
要求求出变换矩阵W,并求出变换结果y i,(i=1,2,3,4,5)。
(3)根据(2)特征提取后的一维特征,选用一种合适的聚类算法将这些样本分为两类,要求每类样本个数不少于两个,并写出聚类过程。
2.10 (1)试给出c-均值算法的算法流程图;(2)试证明c-均值算法可使误差平方和准则∑∑∈=--=)()()()()(1)(kjixkjiTkjicjk zxzxJω最小。
其中,k是迭代次数;)(kjz是)(kjω的样本均值。
2.11 现有2k+1个一维样本,其中k个样本在x=-2处重合,另k个样本在x=0处重合,只有1个在x=a>0处。
若a=2(k+1),证明,使误差平方和准则Jc最小的两类划分是x=0处的k个样本与x=a处的1个样本为一类,其余为另一类。
这里,c N jJc = ∑∑(x i-m j)2j=1 i=1其中,c为类别数,Nj是第j类的样本个数,xi∈ωj,i=1,2,...,Nj,mj是第j类的样本均值。
2.12 有样本集}1,55,45,54,44,1,{⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛⎪⎪⎭⎫⎝⎛,试用谱系聚类算法对其分类。
2.13 设有样本集S=},...,,{21nxxx,证明类心z到S中各样本点距离平方和∑=--niiTizxzx1)()(为最小时,有∑==niixnz11。
2.14 假设s为模式矢量集X上的距离相似侧度,有,0,(,)0x y s x y∀>>且当0a>时,(,)/(,)d x y a s x y=。
证明d是距离差异性测度。
2.15 证明欧氏距离满足旋转不变性。
提示:运用Minkowski不等式,对于两矢量T1[,,]lx x x=和min min max max m m (),(),(),()()ss ss ss ss ss ss ss ssavg avg ean ean d s d s d s d s d s ,满足1/1/1/111()()()ppplllpppi i i i i i i y y x x ≤+===+∑∑∑2.16证明:(a )如果s 是类X 上的距离相似侧度,,0,(,)0x y s x y ∀>>,那么对于 0a ∀>,(,)s x y a +也是类X 上的距离测度。
(b )如果d 是类X 上的距离差异性测度,那么对于0a ∀>, d a +也是类X 上的距离差异性测度2.17 假设:f R R ++→是连续单调递增函数,满足()()(),,f x f y f x y x y R ++≥+∀∈d 是类X 上的距离差异性测度且00d ≥。
证明 ()f d 也是类X 上的距离差异性测度。
2.18 假设s 为类X 上的距离相似侧度,有,0,(,)0x y s x y ∀>>, :f R R ++→是连续单调递增函数,满足111()()(),,f x f y f x y R ++≥∀∈+证明()f x 是X 上的距离相似侧度。
2.19 证明:对于模式矢量集X 上任意两个矢量x 和 y 有21(,)(,)(,)x y x y x y d d d ∞≤≤2.20 (a )证明公式1/(,)1(,)()qF l q q x y i i i s x y s ==∑中 (,)F s x y的最大最小值分别是和 1/0.5q l 。
(b )证明当q →+∞时,公式1/(,)1(,)()qqFlq x y i i i s x y s ==∑中1(,)max (,)i l i i Fx y s x y s ≤≤=2.21 假设d 是模式矢量集X 上的差异性测度,max s d d =-是相应相似测度。
证明max (,)(,),,pspsavg avg x C x C x X C Xs d d =-∀∈⊂其中ps avgs和ps avgd是分别根据s 和d 所定义的。
ps avgψ的定义来自于下面公式,其中第一个集合只含有一个矢量。
提示:平均亲近函数1(,)(,)i ji jps avg i j x D y D D D D D x y n n ∈∈ψ=ψ∑∑,其中iD n 和jD n 分别是集合i D 和 j D 的势。
即使 ψ是测度,显然ps avgψ不是测度。
在公式中,i D 和 j D 中的所有矢量都参与计算。
2.22 假设,{0,1}l x y ∈。
证明2(,)x y d =。
2.23 考虑一维空间的两矢量,T1[,,]l x x x = 和 T1[,,]l y y y = ,1max {}j l ij ijyy x x =-=- ,定义距离(,)nx y d为1,1(,)[(2)/2]lniiiij j ix y l l yydx x =≠=-+---∑这个距离曾被提议作为欧氏距离的近似值。
(a )证明n d 是距离。
(b )比较n d和2d的计算复杂度。
2.24 若定义下列准则函数11()()i cT T i T i i x X J x m S x m -=∈=--∑∑其中i m 是 i X 中 i N 个样本的均值向量, T S 是总散布矩阵,(1)证明T J 对数据的非奇异线形变换具有不变性。