汽车嵌入式系统的开发流程(汽车电子技术)
《嵌入式开发》课件

分类:嵌入式网 络通信技术可以 分为有线网络通 信和无线网络通 信两大类。
有线网络通信: 包括以太网、 USB、串行通信 等,可以实现嵌 入式系统与外部 网络的高速、稳 定、可靠的数据 传输。
无线网络通信: 包括Wi-Fi、蓝 牙、ZigBee等, 可以实现嵌入式 系统与外部网络 的低功耗、远距 离、灵活的数据 传输。
优化方法:对操作 系统进行裁剪和优 化,提高系统性能
移植与优化工具: 使用嵌入式操作系 统移植工具,如 Yo c t o 、 Buildroot等
移植与优化效果: 提高系统稳定性、 降低功耗、提高性 能,满足实际应用 需求。
06
嵌入式网络通信技术
嵌入式网络通信技术的概述与分类
概述:嵌入式网 络通信技术是嵌 入式系统与网络 通信技术相结合 的产物,可以实 现嵌入式系统与 外部网络的互联 互通。
04
嵌入式软件开发基础
嵌入式软件开发流程
需求分析:明确系统需求,确定功能、 性能、接口等要求
系统设计:进行ቤተ መጻሕፍቲ ባይዱ件和软件设计,包括 芯片选型、电路设计、软件架构设计等
编码实现:编写源代码,进行单元测试 和集成测试
测试验证:进行系统测试和性能测试, 确保系统稳定可靠
发布部署:将系统部署到目标设备上, 进行现场调试和优化
嵌入式系统的应用领域
工业控制:如自动化生产线、机器人等
医疗设备:如医疗仪器、医疗机器人等
智能家居:如智能家电、智能安防等
汽车电子:如车载导航、汽车电子控制单 元等
消费电子:如智能手机、平板电脑等 航空航天:如卫星、航天器等
03
嵌入式硬件平台
ARM处理器架构
ARM处理器架构是一种广泛应用于嵌入式系统的处理器架构 ARM处理器架构的特点是低功耗、高性能、低成本 ARM处理器架构的应用领域包括智能手机、平板电脑、物联网设备等 ARM处理器架构的发展趋势是向高性能、低功耗、高集成度方向发展
汽车电子软件开发流程 ISO 26262说明书
符合ISO 26262的汽车电子软件开发流程董淑成**************************MathWorks中国ISO 26262(2011)高完整性软件开发标准和基于模型的设计01219901995200020052010基于模型设计的应用标准生效的年份DO-178B (1992)NASA-GB-8719.13(2004)IEC 61508(1998)DO-178C(2011)IEC 61508(2010)EN 50128(2001)EN 50128(2011)IEC 61511(2003)软件开发标准里出现基于模型的设计为什么?大纲▪ISO 26262软件开发项目的启动▪符合ISO 26262的软件开发过程软件开发ISO 26262定义的软件开发过程系统集成和测试系统设计软件需求验证软件集成和测试软件单元测试软件单元设计及实现软件需求定义软件架构设计系统测试软件测试软件测试软件测试设计验证设计验证设计验证软件开发ISO 26262的软件项目启动系统集成和测试系统设计软件需求验证软件集成和测试软件单元测试软件单元设计及实现软件需求定义软件架构设计系统测试软件测试软件测试软件测试设计验证设计验证设计验证1.软件开发计划2.软件验证计划3.编程、建模语言的选择4.编码、建模标准5.工具的选择6.工具应用指南建模/编程语言的选择及相关标准▪建模或者编程语言的选择标准–明确的定义–支持嵌入式实时软件和运行时错误处理–支持模块化、抽象及结构化▪语言本身不能涵盖的上述标准应通过相应的指导或开发环境涵盖TopicsASILA B C D 1a Enforcement of low complexity++++++++ 1b Use of Language subsets++++++++ 1c Enforcement of strong typing++++++++ 1d Use of defensive implementation technique O+++++ 1e Use of established design principles+++++ 1f Use of unambiguous graphical representation+++++++ 1g Use of style guides+++++++ 1h Use of naming conventions++++++++▪通常,汽车电子软件选择C语言–基础软件手工编写C代码–控制策略软件通过Simulink建模并自动生成代码C代码•建模/编码标准要涵盖的内容Simulink/Stateflow建模标准▪汽车行业建模标准(MAAB)–专门为汽车行业Simulink用户制定▪高完整性系统建模标准–专门为民航、火车、汽车等高完整性系统建模制定设计工具/验证工具的选择 工具的分类及资质审核TI 2TI 1TD 3TD 1TD 2TCL 3TCL 2TCL 1工具错误的检测工具置信水平高中无/ 低增加审核需求工具的影响ASIL 为TCL2级的资质审核无需额外的资质审核为TCL3级的资质审核工具分类工具资质审核UC 1..n 软件工具有引入错误或者不能检出错误的可能工具的功能/用例TÜV SÜD认证的工具▪Embedded Coder™功能:生产针对嵌入式优化的C和C++代码▪Simulink® Verification and Validation™功能:验证模型和模型生成的代码▪Simulink® Design Verifier™功能:定位设计错误,生成测试用例,并根据需求对设计进行验证▪Polyspace® Client™ for C/C++功能:证明源代码没有运行期错误▪Polyspace® Server™ for C/C++功能:在计算机集群执行代码验证并发布度量开发工具的应用指南▪除了选择开发工具之外,还要提供开发工具的应用指南▪Embedded Coder等工具具有非常详实的用户手册需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成汽车电子软件的现状和复杂软件开发的困境▪GM汽车上的代码量▪软件工程师的工作效率▪解决复杂软件开发效率低下的途径–模块化开发模块化的原则和目标▪模块划分的一般原则–从功能上–高内聚–低耦合▪模块划分的目标–简化设计–便于分工–便于测试–便于后期维护▪In order to avoid failures resulting from high complexity, the software architecture design shall exhibit the following properties,–Modularity;–Encapsulation; and–Simplicity.ISO 26262软件架构设计原则▪软件架构设计原则MethodsASILA B C D1a Hierarchical structure of software components++++++++ 1b Restricted size of software components++++++++ 1c Restricted size of interfaces++++ 1d High cohesion within each software component+++++++ 1e Restricted coupling between software components+++++++ 1f Appropriate scheduling properties++++++++ 1g Restricted use of interrupts+++++软件的层次化结构设计▪模块如何划分–从功能上划分组件▪以发动机为例,分为:点火、进气、油量计算、怠速、巡航等▪模型实现上model reference发动机控制点火控制进气计算燃油控制怠速控制巡航控制其他–对复杂组件进一步划分为单元模块▪以发动机的怠速控制为例,分为暖机怠速、闭环速度控制、扭矩请求等单元▪模型实现上model reference系统级组件级单元级单元模块的设计不建议使用Model Reference.基于模型的嵌入式软件开发需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成Simulink建模语言▪使用建模语言的子集▪Simulink和Stateflow之间的选择–如果算法是复杂的逻辑运算,使用Stateflow;–如果算法主要是数据运算,使用Simulink;▪Stateflow的flow chart和state chart之间的选择–如果算法本质上是计算工作状态或者离散状态,使用state chart;–如果算法本质上是if-then-else结构,使用flow chart或者真值表;ISO 26262软件单元的设计原则▪Example: Parallel states should not appear at the top level of a state-chart.--Misra Modeling GuidelineMethodsASILABCD1a One entry and one exit point in subprograms and functions++++++++1b No dynamic objects or variables, or else online test during their creation +++++++1c Initialization of variables++++++++1d No multiple use of variable names+++++++1e Avoid global variables or else justify their usage ++++++………1h No hidden data flow or control flow +++++++1jNo recursions++++++▪软件单元的设计和实现原则模型复杂度监测对单元模块进行复杂度监测–Model advisor–圈复杂度Simulink模型的平台化开发▪Model Variants–通过配置不同的参数选择不同的被引用模型–比如,K_Param== CLASS_A,选择Model_A.mdl;K_Param== CLASS_B,选择Model_B.mdl–支持生成条件编译的代码▪System Variants基于模型的嵌入式软件开发需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成软件开发ISO 26262定义的软件开发过程系统集成和测试系统设计软件需求验证软件集成和测试软件单元测试软件单元设计及实现软件需求定义软件架构设计系统测试软件测试软件测试软件测试设计验证设计验证设计验证MAAB及相关规范的检查▪Model Advisor实现建模规范检查▪定制检查集▪定制检查项模型评审▪模型和需求的双向追溯–模型→需求–需求→模型▪Simulink Report Generator生成报告–为非Simulink用户生成报告▪Simulink Report Generator实现不同版本模型比较使用Simulink Design Verifier检查逻辑错误▪设定生成测试用例目标为MC/DC100%覆盖▪生成测试用例▪逻辑错误导致无法生成100%覆盖的测试用例,并提示错误逻辑使用Simulink Design Verifier检查数据错误▪通过算术运算分析定位错误–数据溢出–被零除▪证明没有错误的运算演示Simulink Design Verifier检查错误单元模块的功能测试▪仿真测试▪覆盖率分析模型测试的覆盖率要求▪对单元软件测试的结构覆盖率要求–覆盖率达到分支覆盖率100%–MC/DC 要求▪对软件架构测试的覆盖率要求MethodsASILABCD1a Statement coverage ++++++1b Branch coverage+++++++1cMC/DC (Modified Conditional/Decision Coverage)+++++MethodsASILABCD1a Function coverage ++++++1bCall coverage++++++模型的集成测试▪模型的组件级集成测试▪模型的系统级测试–模型在环测试–快速原型▪不同组件之间的接口测试▪不同组件功能上是否冲突基于模型的嵌入式软件开发需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成代码生成的前提条件 模型经过充分验证模型符合建模标准功能测试覆盖率足够高模型不含有无效逻辑模型不含有数据错误GenerateCode数据对象和数据字典▪使用数据对象定义数据属性Properties (属性)Classes (类)Package (包)SimulinkSignal DataTypeData Storage ClassMin/Max ParameterData TypeData Storage ClassmodelName = 'f14';dictionaryName = 'myNewDictionary.sldd ‘;dictionaryObj =Simulink.data.dictionary.create(dictionaryName);set_param(modelName,'DataDictionary',dictionaryName);▪使用数据字典管理数据对象数据字典管理数据按照组件划分进行数据管理代码生成工具配置1. 通过系统目标文件设定回调函数2. 在代码生成设置的回调函数里固化设置软件工具除确定id 和版本号之外,还需要确定配置等效性测试▪SIL测试/PIL测试都是等效性测试–验证生成的代码和用于代码生成的模型具有相同的行为属性–PIL除等效性验证之外,还可以用来测量运行时间▪等效性测试的测试用例–功能测试的测试用例–Simulink Design Verifier自动生成▪模型覆盖率和代码覆盖率的比较代码的集成和集成测试▪代码集成的两种方式–单元模型的代码生成,代码级别做集成–模型级别集成,然后生成代码▪软硬件的系统级集成–硬件在环测试–台架测试–实车测试Plant model uController models1s2s3+Plant Model in PC uControllers1s2s3+基于模型的嵌入式软件开发需求分析•模型架构•可实现性•可测性•可追溯•可配置模型建立•建模语言•建模标准•模型复杂度•平台化开发模型验证•建模标准•模型评审•形式化方法验证•功能测试代码实现•数据管理•等效性测试•代码验证•代码集成MathWorksChange the world byAccelerating the paceof discovery, innovation, development, and learningin engineering and science。
嵌入式系统基础理论与实践考试试卷
嵌入式系统基础理论与实践考试试卷(答案见尾页)一、选择题1. 嵌入式系统的定义是什么?A. 一种专门的计算机系统,具有面向特定应用领域的处理器和内存B. 一种特殊的计算机系统,具有实时处理能力C. 一种集成了操作系统和编程语言的计算机系统D. 一种专为移动设备设计的计算机系统2. 嵌入式系统的主要特点包括哪些?A. 实时性B. 可靠性C. 低功耗D. 高度集成化3. 嵌入式系统通常应用于哪些领域?A. 消费电子B. 工业控制C. 汽车电子D. 医疗设备4. 嵌入式系统中常用的处理器架构有哪些?A. ARM架构B. x86架构C. PowerPC架构D. MIPS架构5. 嵌入式系统中常用的编程语言有哪些?A. C语言B. C++语言C. Java语言D. Python语言6. 嵌入式系统开发通常分为几个阶段?A. 系统需求分析B. 硬件设计C. 软件开发和调试D. 系统测试和优化7. 嵌入式系统中的实时操作系统(RTOS)具有哪些特点?A. 任务调度的高优先级B. 任务之间的通信和协作C. 内存管理D. 系统安全8. 嵌入式系统中的嵌入式软件主要包括哪些类型?A. 应用软件B. 系统软件C. 支持软件D. 驱动软件9. 嵌入式系统的设计原则包括哪些?A. 可靠性B. 实时性C. 安全性D. 低成本10. 嵌入式系统的发展趋势是什么?A. 处理器性能的提升B. 通信技术的进步C. 微型化的设备D. 人工智能的融合11. 嵌入式系统的定义是什么?A. 一种特殊的计算机系统,具有面向特定应用领域的处理器和存储器B. 一种在微控制器基础上进行二次开发的系统C. 一种集成了操作系统和应用程序的专用计算机系统D. 一种基于实时操作系统(RTOS)的计算机系统12. 嵌入式系统的主要特点包括哪些?A. 低功耗、低成本B. 高可靠性、高稳定性C. 实时处理能力D. 易于编程和调试13. 嵌入式系统中常用的处理器类型有哪些?A. 微处理器(CPU)B. 微控制器(MCU)C. 嵌入式DSP处理器D. 嵌入式FPGA处理器14. 嵌入式系统的软件架构通常包括哪几个层次?A. 操作系统层B. 应用软件层C. 服务软件层D. 硬件抽象层(HAL)15. 嵌入式系统中的实时操作系统(RTOS)有哪些特点?A. 多任务处理能力B. 优先级调度C. 时间限制保证D. 资源利用率高16. 嵌入式系统开发中常用的编程语言有哪些?A. C语言B. C++语言C.汇编语言D. Java语言17. 嵌入式系统的硬件描述语言(HDL)有哪些?A. VerilogB. VHDLC. VHSICD. SystemC18. 嵌入式系统中的总线协议有哪些?A. I2CB. SPIC. UARTD. PCIe19. 嵌入式系统的调试方法有哪些?A. 内部调试B. 外部调试C. 在线仿真D. 物理原型调试20. 嵌入式系统的设计流程通常包括哪些步骤?A. 需求分析B. 方案设计C. 硬件开发D. 软件编写和调试E. 系统集成和测试F. 生产和部署21. 嵌入式系统的定义是什么?A. 一种特殊的计算机系统,具有高度集成和低功耗特点B. 一种在工业控制领域广泛应用的计算机系统C. 一种用于实现各种自动化设备的计算机系统D. 一种专门用于存储和处理程序的计算机系统22. 嵌入式系统的组成通常包括哪些部分?A. CPU、内存和外部设备B. CPU、内存和操作系统C. CPU、内存和应用程序D. CPU、内存和硬件抽象层23. 嵌入式系统的工作原理是基于什么?A. 硬件电路B. 软件程序C. 微控制器D. 操作系统24. 嵌入式系统的开发过程通常包含哪些步骤?A. 需求分析、设计、编码、测试和部署B. 需求分析、设计、编码、调试和测试C. 需求分析、设计、编码、优化和测试D. 需求分析、设计、编码、维护和升级25. 嵌入式系统通常用于哪些领域?A. 消费电子产品B. 工业控制系统C. 汽车电子D. 医疗设备26. 嵌入式系统的实时性要求如何?A. 高实时性,可以容忍一定程度的延迟B. 中实时性,需要在较短时间内完成任务C. 低实时性,对延迟非常敏感D. 无实时性要求27. 嵌入式系统的数据处理方式通常是什么?A. 基于文件的处理方式B. 基于数据库的处理方式C. 基于事件驱动的处理方式D. 基于进程的处理方式28. 嵌入式系统的安全性考虑因素主要包括哪些方面?A. 设备安全、数据安全和通信安全B. 设备安全、软件安全和数据安全C. 设备安全、软件安全和通信安全D. 设备安全、数据安全和硬件安全29. 嵌入式系统的设计原则通常包括哪些方面?A. 可靠性、可扩展性和可维护性B. 可靠性、高效性和可维护性C. 可靠性、可扩展性和高性能D. 可靠性、高效性和高性能30. 嵌入式系统的未来发展趋势可能包括哪些方面?A. 人工智能和机器学习的融合B. 5G和物联网的发展C. 绿色环保和节能技术D. 容错性和自愈能力31. 嵌入式系统的定义是什么?A. 一种专门的计算机系统,具有面向特定应用领域的特性。
汽车产品设计开发流程

汽车产品设计开发流程汽车产品设计开发流程Product Development Procedure许妮2009-12前言中国汽车市场已经成为全球发展最快的市场。
整车企业间的竞争日趋激烈3>.面对激烈的市场竞争,各国汽车企业都在认真研究怎样才能在最短的时间内,把高质量、低成本的产品推向瞬息万变的市场,满足顾客的需求和赢得市场竞争的胜利。
自主品牌轿车要赢得市场,必须推出安全、可靠、美观大方、舒适、适应中国的高品质车。
汽车产品的研发是一项系统而复杂的工程。
它的开发流程包括创意、造型、设计、工程分析、样车实验、工装设计及加工、调试、生产、装配等工作。
为达到我们的目标,就必需要建立具有竞争力的产品开发管理流程,发挥团队合作精神.课程的目的Course Objectives帮助学员了解:国际通用的汽车开发流程供应商的选择与管理产品设计和生产过程的质量管理。
产品开发流程Product Development Procedure轿车开发五个阶段一、前期开发形成产品战略意向二、概念设计和可行性研究阶段三、产品设计阶段四、产品验证阶段五、定型生产阶段一、前期开发形成产品战略意向Kick Off前期研究启动市场调研筹划(Program Commencement)决策者必须有确定的目标调研人员作市场调研整个汽车市场的现状、发展趋势、经济、文化、宏观1/31页经济现状、公路交通概况、汽车产业现状等市场情况(价格经销商新车销售,二手车,进口车情况) 汽车发展规划及相关政策* 汽车进口手续,我国汽车产品,当地主要经销商二、概念设计和可行性研究阶段Concept Design andFeasibility Study造型开发(Styling)CAD 数模建立CAE 可行性分析概念设计和可行性研究阶段开发周期(Timing ):新车开发一般都是32个月或36个月(平台开发)。
整车开发(包括底盘的)厂家上市周期其中设计冻结周期 hoda 22月 18月 toyota 38月15月 nissan28月 19月 renault 49月 26月 mazda 38月 18月 DC 39月 28月 GM36月 30月三、产品设计阶段Product Design详细设计( Detail Design)车身(Body)底盘 (Chassis)动力总成(Powertrain)电子电器 (8>EE)仿真 (CAE)工艺的同步工程(Process Simultaneous Engineering) 产品设计阶段Detail Design车身(,,,,)1. 材料:车身专用钢板具有深拉延时不易产生裂纹的特点。
汽车开发流程1
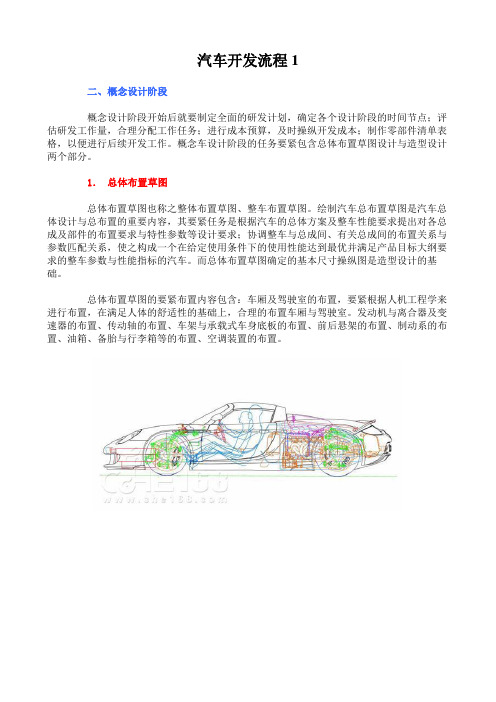
汽车开发流程1二、概念设计阶段概念设计阶段开始后就要制定全面的研发计划,确定各个设计阶段的时间节点;评估研发工作量,合理分配工作任务;进行成本预算,及时操纵开发成本;制作零部件清单表格,以便进行后续开发工作。
概念车设计阶段的任务要紧包含总体布置草图设计与造型设计两个部分。
1.总体布置草图总体布置草图也称之整体布置草图、整车布置草图。
绘制汽车总布置草图是汽车总体设计与总布置的重要内容,其要紧任务是根据汽车的总体方案及整车性能要求提出对各总成及部件的布置要求与特性参数等设计要求;协调整车与总成间、有关总成间的布置关系与参数匹配关系,使之构成一个在给定使用条件下的使用性能达到最优并满足产品目标大纲要求的整车参数与性能指标的汽车。
而总体布置草图确定的基本尺寸操纵图是造型设计的基础。
总体布置草图的要紧布置内容包含:车厢及驾驶室的布置,要紧根据人机工程学来进行布置,在满足人体的舒适性的基础上,合理的布置车厢与驾驶室。
发动机与离合器及变速器的布置、传动轴的布置、车架与承载式车身底板的布置、前后悬架的布置、制动系的布置、油箱、备胎与行李箱等的布置、空调装置的布置。
测量得到的点云数据某轿车白车身侧围部分设计图5.底盘工程设计底盘工程设计的内容就是对底盘的4大系统进行全面的设计,包含:传动系统设计、行驶系统设计、转向系统设计与制动系统设计。
要紧工作包含:(1)对各个系统零部件进行包含尺寸、结构、工艺、功能与参数等方面的定义(2)根据定义进行结构设计与计算,完成3维数模(3)零部件样件试验(4)完成设计图与装配图其中传动系统的要紧设计内容为离合器、变速器、驱动桥,行驶系统的要紧设计内容为悬架设计,转向系统的要紧设计内容为转向器与转向传动机构的设计,制动系统的设计内容包含制动器与ABS的设计。
底盘部分系统3维设计图国内某汽车企业试验场在奇瑞,一个全新的车型的开发,通常有10个节点,P0到P9,通常要45个月。
P0阶段:立项建议书。
面向汽车电子的嵌入式软件开发应用软件的研究与分析

感谢您的观看
汇报人:XX
面向汽车电子的嵌入 式软件开发应用软件 的研究与分析 汇报人:XX
目录
添加目录标题
嵌入式软件开发概述
汽车电子系统中的嵌 入式软件开发技术
汽车电子系统中的嵌 入式软件应用实例
汽车电子系统中的嵌入式 软件开发挑战与未来发展
结论
添加章节标题
嵌入式软件开发概 述
嵌入式系统是一种专用的计算机系 统,旨在执行特定的任务或功能
编码实现: 根据设计文 档进行代码 编写
测试验证: 对软件进行 测试和验证, 确保其正确 性和稳定性
部署维护: 将软件部署 到目标平台 上,并进行 后续的维护 和升级
工业控制领域
汽车电子领域
添加标题
添加标题
智能家居领域
添加标题
添加标题
医疗电子领域
嵌入式软件定义:指针对汽车电子系统进行设计、开发、测试、运行和维护的专用软件。 嵌入式软件特点:实时性、可靠性、安全性、可扩展性等。 嵌入式软件应用范围:汽车发动机控制、底盘控制、车身控制、导航系统等。 嵌入式软件开发流程:需求分析、设计、编码、测试、部署等。
嵌入式系统广泛应用于汽车电子、 智能家居、医疗设备等领域
添加标题
添加标题
添加标题
添加标题
嵌入式系统通常与实际应用紧密结 合,具有实时性、可靠性和低功耗 等特点
嵌入式软件开发是针对嵌入式系统 的软件开发,涉及到硬件和软件的 协同设计、优化和测试等方面
需求分析: 明确软件的 功能和性能 要求
架构设计: 确定软件的 整体结构和 模块划分
可靠性挑战:硬件故障、 软件崩溃等
未来发展方向:提高安全 性和可靠性的技术手段
嵌入式软件在汽车电子系统中的重要性 嵌入式软件开发过程中的质量保证措施 软件测试的目的、方法及流程 未来发展趋势:自动化测试和持续集成
嵌入式系统的发展历程

嵌入式系统的发展历程嵌入式系统是一种特殊的计算机系统,它嵌入在一些特定的设备中,用于控制和执行特定的功能。
随着科技的发展,嵌入式系统得到了广泛的应用,其发展历程也经历了几个阶段。
第一阶段是嵌入式系统的起步阶段。
在20世纪50年代和60年代,嵌入式系统主要用于军事和航空领域。
这些系统使用的是早期的电子管和磁芯存储器,体积庞大且功能有限。
然而,随着集成电路技术的发展,嵌入式系统开始变得更小巧、更高效。
第二阶段是嵌入式系统的成熟阶段。
在20世纪70年代和80年代,嵌入式系统开始在工业控制、汽车电子和家用电器等领域得到广泛应用。
这些系统使用的是更加先进的微处理器和存储器,能够实现更多样化的功能。
同时,实时操作系统的发展也使得嵌入式系统能够更好地响应外部事件和控制任务。
第三阶段是嵌入式系统的智能化阶段。
在20世纪90年代和2000年代,嵌入式系统开始融合更多的智能化技术,如人工智能、机器学习和无线通信等。
这些系统能够实现更复杂的任务,如语音识别、图像处理和无线通信。
同时,嵌入式系统的体积也进一步缩小,能够嵌入到更多的设备中。
第四阶段是嵌入式系统的互联网化阶段。
随着互联网的普及,嵌入式系统开始与互联网进行连接,形成了IoT(物联网)的概念。
这使得嵌入式系统能够实现远程访问、数据共享和云计算等功能,极大地扩展了其应用范围。
例如,智能家居、智能交通和智能医疗等领域的发展,都与嵌入式系统的互联网化密不可分。
第五阶段是嵌入式系统的人工智能阶段。
随着深度学习和神经网络等人工智能技术的快速发展,嵌入式系统也开始加入更复杂的智能化算法和硬件。
这使得嵌入式系统能够实现更高级的人工智能功能,如人脸识别、自动驾驶和智能机器人等。
同时,人工智能技术的推动也使得嵌入式系统在医疗、安防和工业等领域发挥了更大的作用。
总的来说,嵌入式系统在发展历程中经历了起步阶段、成熟阶段、智能化阶段、互联网化阶段和人工智能阶段等几个阶段。
每个阶段都伴随着技术的进步和应用的拓展,使得嵌入式系统在各个领域发挥了越来越重要的作用。
嵌入式系统驱动程序开发与调试考试试卷

嵌入式系统驱动程序开发与调试考试试卷(答案见尾页)一、选择题1. 嵌入式系统驱动程序的主要作用是什么?A. 提供设备抽象层B. 管理硬件资源C. 实现设备驱动程序的同步和互斥机制D. 提供用户空间的接口2. 在嵌入式系统中,通常哪种类型的驱动程序被使用?A. 字符设备驱动程序B. 块设备驱动程序C. 网络设备驱动程序D. 驱动程序模板3. 在开发嵌入式系统驱动程序时,如何确定和初始化硬件资源?A. 使用设备树B. 编写设备驱动程序的初始化函数C. 利用操作系统提供的资源管理工具D. 通过硬件抽象层(HAL)进行资源管理4. 嵌入式系统的实时性能测试通常关注哪些指标?A. CPU占用率B. 内存访问延迟C. I/O操作吞吐量D. 系统功耗5. 在调试嵌入式系统驱动程序时,常用的诊断工具有哪些?A. 调试器B. 打印语句C. 日志记录D. 性能分析工具6. 嵌入式系统驱动程序通常如何集成到操作系统中?A. 静态链接B. 动态加载C. 嵌入式模块D. 入口函数7. 在嵌入式系统开发中,为什么需要对驱动程序进行严格测试?A. 确保系统稳定性B. 提高系统兼容性C. 遵循相关标准和规范D. 保证用户体验8. 嵌入式系统驱动程序与用户空间应用程序之间的通信通常使用哪种方式?A. 管道B. 消息队列C. 共享内存D. 回调函数9. 在嵌入式系统驱动程序的开发过程中,如何处理并发问题?A. 使用信号量B. 采用中断服务程序C. 利用锁机制D. 编写合适的同步代码10. 嵌入式系统驱动程序的调试过程通常包括哪些步骤?A. 编写驱动程序代码B. 进行静态分析C. 进行动态调试D. 验证系统性能11. 嵌入式系统驱动程序开发流程A. 需求分析B. 设计内核驱动模块C. 编写驱动程序源代码D. 调试、测试与优化12. 嵌入式系统驱动程序调试方法A. 使用调试工具B. 查看系统日志C. 使用printk函数D. 硬件仿真器调试13. 嵌入式系统驱动程序性能优化A. 代码级优化B. 架构优化C. 存储器管理优化D. I/O操作优化14. 嵌入式系统驱动程序安全性考虑A. 防止恶意攻击B. 数据加密C. 用户权限管理D. 内核模块审计15. 嵌入式系统驱动程序标准化与模块化A. 标准化驱动程序接口B. 模块化设计C. 统一驱动程序框架D. 驱动程序版本管理16. 嵌入式系统驱动程序的可移植性A. 平台无关性B. 代码重构C. API兼容性17. 嵌入式系统驱动程序的测试与验证A. 原型验证B. 系统级测试C. 性能测试D. 安全性测试18. 嵌入式系统驱动程序的开发工具A. 集成开发环境(IDE)B. 文本编辑器C. 版本控制工具D. 调试器19. 嵌入式系统驱动程序的实际应用案例A. 智能家居系统B. 工业自动化控制C. 车载电子系统D. 医疗设备20. 嵌入式系统驱动程序开发流程A. 分析需求,确定硬件平台B. 设计驱动程序架构C. 编写驱动程序代码D. 调试和优化驱动程序21. 嵌入式系统驱动程序开发中的关键问题A. 防止资源冲突B. 提高驱动程序性能C. 确保驱动程序稳定性D. 方便其他程序调用22. 嵌入式系统驱动程序的调试方法B. 查看日志信息C. 使用断点调试D. 分析驱动程序的执行过程23. 嵌入式系统驱动程序的测试策略A. 建立测试用例B. 进行单元测试C. 进行集成测试D. 进行系统测试24. 嵌入式系统驱动程序的版本控制与管理A. 使用版本控制系统B. 对源代码进行版本管理C. 对编译后的文件进行版本管理D. 对驱动程序的版本进行跟踪25. 嵌入式系统驱动程序的可扩展性与可维护性A. 采用模块化设计B. 使用标准接口C. 提供丰富的配置选项D. 优化代码结构26. 嵌入式系统驱动程序的安全性问题A. 防止恶意攻击B. 保护用户隐私C. 防止数据泄露D. 确保系统的稳定性27. 嵌入式系统驱动程序在实际应用中的案例分析A. 案例一:某嵌入式设备的驱动程序开发B. 案例二:某智能家居设备的驱动程序调试C. 案例三:某自动驾驶系统的驱动程序测试D. 案例四:某医疗设备的驱动程序版本控制28. 嵌入式系统驱动程序开发环境搭建A. 安装虚拟机及必要的软件B. 配置开发板C. 编写驱动程序源代码D. 部署驱动程序到目标板29. 嵌入式系统驱动程序编程基础A. C语言基础知识B. 汇编语言基础C. 嵌入式系统硬件平台介绍D. 驱动程序设计原则与规范30. 嵌入式系统驱动程序结构与原理A. 驱动程序总体架构B. 驱动程序与上层应用关系C. 驱动程序与操作系统接口D. 驱动程序的加载与卸载31. 嵌入式系统驱动程序调试技巧A. 使用调试工具B. 调试命令与命令行参数C. 断点设置与单步执行D. 调试过程中的常见问题与解决方法32. 嵌入式系统驱动程序性能优化A. 性能分析方法B. 优化策略C. 编码优化D. 系统资源合理分配33. 嵌入式系统驱动程序测试与验证A. 测试计划与用例设计B. 测试环境搭建C. 测试结果分析与报告D. 驱动程序问题修复与重测34. 嵌入式系统驱动程序维护与升级A. 系统更新与驱动程序升级B. 驱动程序版本管理C. 驱动程序兼容性测试D. 驱动程序文档编写与更新35. 嵌入式系统驱动程序案例分析A. 嵌入式系统驱动程序成功案例B. 嵌入式系统驱动程序失败案例C. 案例分析与经验教训总结D. 驱动程序开发的最佳实践36. 嵌入式系统驱动程序发展趋势与挑战A. 新型驱动程序开发技术B. 嵌入式系统的发展趋势C. 驱动程序面临的挑战D. 对嵌入式系统工程师的技能要求37. 嵌入式系统驱动程序开发环境的搭建A. 安装Windows CE操作系统B. 选择合适的开发工具C. 配置编译环境D. 编写驱动程序源代码38. 嵌入式系统驱动程序的框架设计A. 确定设备驱动程序的功能需求B. 设计设备驱动程序的结构C. 实现设备驱动程序的关键函数D. 编写设备驱动程序的示例代码39. 嵌入式系统驱动程序的编程规范A. 遵循设备驱动程序的编程规范B. 使用合适的编程语言和库函数C. 注释和文档编写D. 调试和测试驱动程序40. 嵌入式系统驱动程序的集成与测试A. 将驱动程序集成到嵌入式系统中B. 进行系统级测试C. 进行性能测试D. 解决测试中遇到的问题41. 嵌入式系统驱动程序的维护与更新A. 维护驱动程序的稳定性和兼容性B. 更新驱动程序以适应新的硬件和软件环境C. 处理驱动程序中的错误和漏洞D. 优化驱动程序的性能42. 嵌入式系统驱动程序的知识产权保护A. 了解知识产权法律法规B. 申请专利保护C. 保护商业秘密D. 避免侵权行为43. 嵌入式系统驱动程序的未来发展趋势A. 向更高速、更低功耗的方向发展B. 更加智能化和自动化C. 更加集成化和模块化D. 更加注重安全性和可靠性44. 嵌入式系统驱动程序的综合应用A. 嵌入式系统的整体设计B. 嵌入式系统的测试与验证C. 嵌入式系统的优化与升级D. 嵌入式系统的维护与支持二、问答题1. 什么是嵌入式系统?请简要描述。
嵌入式系统原理及应用考试试卷
嵌入式系统原理及应用考试试卷(答案见尾页)一、选择题1. 嵌入式系统的定义是什么?A. 一种计算机系统,具有面向特定应用的功能B. 一种计算机系统,具有高度集成和可编程的特性C. 一种计算机系统,具有实时处理和多任务处理的能力D. 一种计算机系统,具有广泛的应用领域2. 嵌入式系统的主要组成部分包括哪些?A. CPUB. 内存C. 存储器D. 输入输出设备3. 嵌入式系统的开发过程通常包括哪些阶段?A. 需求分析B. 设计C. 编程D. 调试和测试4. 嵌入式系统在哪个领域有广泛的应用?A. 消费电子产品B. 工业控制C. 汽车电子D. 医疗设备5. 嵌入式系统的数据处理具有以下特点:A. 高效性B. 实时性C. 紧凑性D. 可靠性6. 嵌入式系统的设计原则通常包括哪些?A. 可靠性B. 安全性C. 可维护性D. 易用性7. 嵌入式系统的软件通常具有以下特点:A. 单任务处理能力B. 多任务处理能力C. 实时性D. 可靠性8. 嵌入式系统的硬件通常具有以下特点:A. 低功耗B. 高性能C. 可靠性D. 实时性9. 嵌入式系统的开发环境通常包括以下工具:A. 集成开发环境(IDE)B. 汇编器C. 连接器D. 调试器10. 嵌入式系统的未来发展趋势可能包括:A. 更高的性能B. 更多的智能化功能C. 更广泛的应用领域D. 更高的可靠性11. 嵌入式系统的定义是什么?A. 一种计算机系统,具有面向特定应用领域的处理器和存储器B. 一种专门用于控制和管理嵌入式系统的硬件和软件的微型计算机C. 一种集成了微处理器和多种传感器和执行器的复杂系统D. 一种专为移动设备设计的计算机系统12. 嵌入式系统的主要特点包括哪些?A. 低功耗和高性能B. 实时处理能力C. 可定制性和可扩展性D. 以上都是13. 嵌入式系统通常用于哪些领域?A. 消费电子产品B. 工业自动化C. 汽车电子D. 以上都是14. 嵌入式系统与通用计算机的区别主要在于什么?A. 体系结构B. 操作系统C. 编程语言D. 以上都是15. 嵌入式系统中常用的编程语言有哪些?A. C语言B. C++语言C. Java语言D. 以上都是16. 嵌入式系统中的实时操作系统(RTOS)有何作用?A. 提供及时响应B. 确保系统安全C. 提高系统资源利用率D. 以上都是17. 嵌入式系统开发流程通常包括哪些阶段?A. 需求分析B. 设计C. 编程D. 调试和测试E. 维护和升级18. 嵌入式系统中的微控制器是如何工作的?A. 通过执行存储在ROM中的程序来控制B. 通过连接到互联网来接收指令和数据C. 通过运行专门的软件来控制D. 通过内置传感器来感知环境并做出响应19. 嵌入式系统在物联网(IoT)中的作用是什么?A. 提供数据处理和分析能力B. 提供通信功能C. 提供用户界面D. 以上都是20. 嵌入式系统在未来科技发展中可能的应用趋势是什么?A. 更广泛的应用领域B. 更高的性能和更低的功耗C. 更丰富的交互方式D. 以上都是21. 嵌入式系统的定义是什么?A. 一种专门的计算机系统,具有高度集成和自动化的特点。
嵌入式系统原理及应用课后答案

嵌入式系统原理及应用课后答案嵌入式系统是一种特殊的计算机系统,它通常被嵌入到各种设备中,如家电、汽车、医疗设备等,以完成特定的功能。
嵌入式系统的原理和应用涉及到计算机科学、电子工程、控制理论等多个领域,具有广泛的应用前景。
在本文中,我们将就嵌入式系统的原理及应用进行一些常见问题的答案解析,希望能够帮助大家更好地理解和应用嵌入式系统。
1. 什么是嵌入式系统?嵌入式系统是一种专门设计用来完成特定功能的计算机系统,通常被嵌入到设备中,与普通计算机系统有所不同。
它具有实时性要求高、资源受限、功耗低等特点,广泛应用于各种电子设备中。
2. 嵌入式系统的原理是什么?嵌入式系统的原理涉及到计算机硬件、嵌入式软件、实时操作系统等多个方面。
在硬件方面,嵌入式系统通常采用定制的处理器和外围设备,以满足特定应用的需求;在嵌入式软件方面,通常需要针对特定硬件平台进行开发,以实现特定功能;实时操作系统则能够保证系统对外部事件的及时响应。
3. 嵌入式系统的应用有哪些?嵌入式系统广泛应用于各种领域,如消费电子、汽车电子、工业自动化、医疗设备等。
例如,智能手机中的操作系统、汽车中的车载电子系统、工业控制中的PLC系统等都属于嵌入式系统的应用范畴。
4. 嵌入式系统的设计需要考虑哪些因素?在设计嵌入式系统时,需要考虑功耗、性能、成本、可靠性等多个因素。
由于嵌入式系统通常被嵌入到设备中,因此对功耗和成本的要求比较高;同时,嵌入式系统的可靠性也是设计过程中需要重点考虑的因素。
5. 嵌入式系统的开发流程是怎样的?嵌入式系统的开发流程通常包括需求分析、系统设计、软件开发、硬件设计、系统集成等多个阶段。
在需求分析阶段,需要明确系统的功能和性能需求;在系统设计阶段,需要确定系统的整体架构和各个模块之间的关系;在软件开发和硬件设计阶段,则需要根据系统的需求进行具体的软硬件开发工作;最后,在系统集成阶段,则需要将软硬件进行整合,进行系统调试和验证。
嵌入式系统教学:嵌入式系统及应用PPT课件

仿真器
用于模拟嵌入式系统的运行环境,便 于开发者在真实硬件之前进行调试和 测试。
调试器
用于在嵌入式系统运行过程中进行实 时调试,帮助开发者定位和解决问题。
交叉编译器
将应用程序代码编译为目标硬件平台 上的可执行文件,实现跨平台开发。
03 嵌入式系统的应用
智能家居
智能家居是嵌入式系统的重要应用领域之一,通过嵌入式系 统可以实现家庭设备的智能化控制和管理,提高生活便利性 和舒适度。
、医学影像设备等。
汽车电子
嵌入式系统用于汽车电 子控制系统,如发动机
控制、车身控制等。
嵌入式系统的发展历程
01
02
03
起源
嵌入式系统的概念起源于 20世纪70年代,主要用于 工业控制领域。
发展
随着微处理器技术的发展, 嵌入式系统逐渐普及,应 用领域不断扩大。
趋势
未来嵌入式系统将朝着智 能化、网络化、低功耗等 方向发展。
RTOS技术具有可移植性和可裁 剪性,可以根据实际需求进行 定制化开发,提高系统的可靠 性和性能。
06 嵌入式系统发展趋势与挑 战
物联网时代的嵌入式系统
嵌入式系统在物联网中的应用
嵌入式系统作为物联网的重要组成部分,广泛应用于智能家居、智能交通、智能制造等领域,实现设备间的互联 互通和智能化控制。
提高实际操作能力。
项目实践
组织学生进行嵌入式系统的项目 实践,将理论知识应用于实际项 目中,提高学生的综合应用能力。
注重培养学生的实际动手能力
提供实验设备和实验环境
学校应提供先进的实验设备和实验环境,满足学生进行实验和实 践的需求。
加强实验课程建设
增加实验课程的比重,设计更多具有挑战性和实用性的实验项目, 引导学生主动实践。
嵌入式系统工程师面试题及答案
嵌入式系统工程师面试题及答案一、基础知识1、什么是嵌入式系统?答:嵌入式系统是一种以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于对功能、可靠性、成本、体积、功耗等有严格要求的专用计算机系统。
它通常嵌入在其他设备或产品中,用于控制、监测或执行特定的任务。
2、嵌入式系统的特点有哪些?答:嵌入式系统具有以下特点:专用性强:针对特定应用需求进行定制开发。
实时性要求高:需要在规定的时间内完成任务响应。
资源受限:处理器性能、内存容量、存储等资源相对有限。
功耗低:通常要求在电池供电或低功耗环境下长时间运行。
可靠性高:在恶劣环境下稳定工作,故障率低。
3、列举几种常见的嵌入式处理器架构。
答:常见的嵌入式处理器架构有:ARM、MIPS、PowerPC、X86 等。
4、什么是中断?中断处理的过程是怎样的?答:中断是指计算机在执行程序过程中,遇到需要紧急处理的事件时,暂停当前程序的执行,转而去执行相应的中断服务程序。
中断处理的过程通常包括:中断请求、中断响应、中断处理、中断返回。
二、操作系统1、列举几种常见的嵌入式操作系统。
答:常见的嵌入式操作系统有:Linux、μC/OSII、FreeRTOS、VxWorks 等。
2、实时操作系统和非实时操作系统的区别是什么?答:实时操作系统对任务的响应时间有严格的要求,必须在规定的时间内完成任务处理,否则可能导致系统故障或错误。
非实时操作系统则对任务响应时间没有严格限制,更注重系统的资源利用率和功能完整性。
3、简述嵌入式操作系统的任务调度算法。
答:常见的任务调度算法有:优先级调度:根据任务的优先级来决定任务的执行顺序,优先级高的任务先执行。
时间片轮转调度:将 CPU 时间分成固定的时间片,每个任务轮流获得时间片执行。
混合调度:结合优先级和时间片轮转的调度方式。
三、编程语言1、嵌入式系统中常用的编程语言有哪些?答:C 语言和C++语言是嵌入式系统中最常用的编程语言。
此外,还有汇编语言、Python 等在特定场景下也会使用。
嵌入式产品研发的具体流程
嵌入式产品研发的具体流程嵌入式产品,与普通电子产品一样,开发过程都需要遵循一些基本的流程,都是一个从需求分析到总体设计,详细设计到最后产品完成的过程。
但是,与普通电子产品相比,嵌入式产品的开发流程又有其特殊之处。
它包含嵌入式软件和嵌入式硬件两大部分,针对嵌入式硬件和软件的开发,在普通的电子产品开发过程中,是不需要涉及的。
嵌入式产品的研发流程具体如下图:下面,针对嵌入式产品的开发过程中的各个阶段,我们进行详细探讨。
阶段1:产品需求在这一个阶段,我们需要弄清楚的是产品的需求从何而来,一个成功的产品,我们需要满足哪些需求。
只有需求明确了,我们的产品开发目标才能明确。
在产品需求分析阶段,我们可以通过以下这些途径获取产品需求:1)市场分析与调研,主要是看市场有什么需求,还有就是前沿的技术是什么(站在做一款产品的角度);2)客户调研和用户定位,从市场广大客户那获取最准确的产品需求(要注意分析市场,产品生命周期,升级是否方便);3)利润导向(成本预算);4)如果是外包项目,则需要我们的客户提供产品的需求(直接从客户那获取,让客户签协议);当一个项目做完的时候,如果客户突然又增加需求,增加功能,将导致你的项目周期严重拖延,成本剧烈上升,并且测试好的产品可能要全部重新测试,原本的设计可能将不会满足当前的要求,所以做项目之前,最好要跟客户把需求确定下来,并且签定一份协议,否则,你辛苦多少个日日夜夜,得到的将是一个无法收拾的烂摊子!阶段2:产品规格说明在前一个阶段,我们搜集了产品的所有需求。
那么在产品规格说明阶段,我们的任务是将所有的需求,细化成产品的具体的规格,就比如一个简单的USB转串口线,我们需要确定产品的规格,包括:产品的外观;产品支持的操作系统;产品的接口形式和支持的规范;等等诸如此类,切记,在形成了产品的规格说明后,在后续的开发过程中,我们必须严格的遵守,没有200%的理由,不能随意更改产品的需求。
否则,产品的开发过程必将是一个反复无期的过程。
汽车软件开发需要遵循的流程体系-概述说明以及解释
汽车软件开发需要遵循的流程体系-概述说明以及解释1.引言1.1 概述汽车软件开发是指在汽车中运行的软件开发过程,随着汽车电子化的普及和互联网技术的发展,汽车软件开发变得越来越重要。
汽车软件不仅需要满足汽车行驶的基本需求,还需要具备更多的智能化和互联网化功能,如车联网、自动驾驶等。
因此,汽车软件开发需要严格遵循一定的流程体系,确保软件开发过程的可靠性、稳定性和安全性。
在本文中,我们将探讨汽车软件开发需要遵循的流程体系,以及其在汽车软件开发中的重要性。
1.2 文章结构文章结构部分是文章的框架,有助于读者更好地理解全文的内容安排和逻辑结构。
文章结构通常包括引言、正文和结论三部分。
在本文中,引言部分主要介绍文章的背景和目的,正文部分详细阐述汽车软件开发的流程体系,结论部分总结了全文的主要内容并展望未来的发展方向。
在正文部分的内容涵盖了软件开发流程概述、汽车软件开发的特点以及遵循的流程体系。
通过这些内容,读者可以了解到汽车软件开发的重要性和复杂性,以及如何通过规范的流程体系来确保软件开发的质量和效率。
整体而言,本文旨在帮助读者深入了解汽车软件开发的流程体系,为企业和开发团队提供指导和参考,同时也为行业的发展做出贡献。
1.3 目的:汽车软件开发是一个具有特定性和复杂性的领域,为了确保软件开发过程的顺利进行和最终产品的质量可靠,需要遵循一套科学的流程体系。
因此,本文旨在探讨汽车软件开发需要遵循的流程体系,为开发人员提供指导和帮助,帮助他们在软件开发过程中充分理解和遵循相关流程,从而提高开发效率,减少开发风险,保障最终产品的质量,推动汽车行业的发展和进步。
同时,通过对汽车软件开发流程的深入分析和探讨,也可以为其他领域的软件开发提供一定的借鉴和启示。
因此,本文的目的是系统性地介绍汽车软件开发流程体系,为相关人员提供参考和借鉴,促进汽车软件行业的发展和进步。
2.正文2.1 软件开发流程概述在汽车软件开发中,遵循一套规范的软件开发流程是非常重要的。
嵌入式系统开发技术考试

嵌入式系统开发技术考试(答案见尾页)一、选择题1. 嵌入式系统的基本组成是什么?A. CPU、内存、外设B. CPU、内存、外部接口C. CPU、内存、操作系统D. CPU、内存、输入输出设备2. 嵌入式系统中常用的编程语言有哪些?A. CB. C++D. Java3. 嵌入式系统硬件平台主要分为哪几类?A. 微控制器B. 微处理器C. 微型计算机D. 大型计算机4. 嵌入式系统的开发过程通常包括哪些阶段?A. 需求分析B. 设计C. 编程D. 调试E. 测试5. 嵌入式系统应用程序通常运行在哪种类型的操作系统上?A. WindowsB. LinuxC. VxWorksD. uClinux6. 嵌入式系统中的实时性要求如何衡量?A. 响应时间B. 平均无故障时间C. 资源利用率D. 系统可靠性7. 嵌入式系统开发中常用的开发工具软件有哪些?A. 集成开发环境(IDE)B. 汇编器C. 解释器D. 版本控制工具8. 嵌入式系统的网络功能是如何实现的?A. 嵌入Web服务器B. 嵌入TCP/IP协议栈C. 嵌入Java虚拟机D. 嵌入专用网络协议9. 嵌入式系统的数据存储通常采用哪种类型?A. 随机存取存储器(RAM)B. 只读存储器(ROM)C. 硬盘驱动器(HDD)D. 固态驱动器(SSD)10. 嵌入式系统的安全性如何保证?A. 使用加密技术B. 设备认证C. 用户权限管理D. 安全更新和补丁11. 嵌入式系统开发技术主要涉及哪些领域?A. 嵌入式操作系统B. 微处理器C. 微控制器D. 传感器技术12. 嵌入式系统的硬件平台主要包括哪些?A. CPUB. 内存C. 存储器D. 总线13. 嵌入式系统中常用的编程语言有哪些?A. CB. C++D. Java14. 嵌入式系统开发中,调试策略有哪些?A. 汇编语言调试B. 连接器调试C. 调试器(如GDB)D. 软件仿真15. 嵌入式系统应用程序通常在哪种环境下开发?A. 集成开发环境(IDE)B. 单独的文本编辑器C. 开发板D. 操作系统模拟器16. 嵌入式系统的安全性问题主要涉及哪些方面?A. 硬件安全B. 软件安全C. 网络安全D. 数据安全17. 嵌入式系统开发中,常用的开发工具软件有哪些?A. 集成开发环境(IDE)B. 版本控制工具(如Git)C. 系统仿真工具D. 硬件描述语言(HDL)仿真器18. 嵌入式系统的低功耗设计主要采用哪些方法?A. 优化电路设计B. 使用低功耗处理器C. 采用节能算法D. 电源管理策略19. 嵌入式系统网络应用开发中,常用的协议有哪些?A. TCP/IPB. UDPC. HTTPD. CoAP20. 嵌入式系统开发中的跨平台开发技术主要涉及哪些方面?A. 操作系统兼容性B. 硬件平台兼容性C. 软件框架共享D. 编程语言交叉平台支持21. 嵌入式系统开发技术的主要特点是什么?A. 高度集成化B. 实时性强C. 低功耗D. 扩展性好22. 嵌入式系统的硬件和软件通常是如何分工的?A. 硬件负责数据处理和执行,软件负责程序开发和系统维护B. 硬件负责数据处理和执行,软件负责程序开发和系统维护C. 软件负责数据处理和执行,硬件负责程序开发和系统维护D. 软件和硬件共同负责数据处理和执行23. 嵌入式系统通常应用于哪些领域?A. 消费电子产品B. 工业控制系统C. 医疗设备D. 以上都是24. 嵌入式系统中常用的编程语言有哪些?A. CB. C++D. Java25. 嵌入式系统的开发流程通常包括哪些阶段?A. 需求分析B. 设计C. 编程D. 调试E. 测试F. 生产26. 嵌入式系统中的实时性是指什么?A. 系统响应速度快B. 系统能够处理大量数据C. 系统具有高度的确定性D. 系统具有高度的可预测性27. 嵌入式系统中的存储器类型主要有哪几种?A. RAMB. ROMC. Flash MemoryD. Hard Disk28. 嵌入式系统中的处理器架构主要有哪几种?A. RISCB. CISCD. EPIC29. 嵌入式系统中的操作系统类型主要有哪几种?A. 实时操作系统B. 分时操作系统C. 微软WindowsD. Linux30. 嵌入式系统的发展趋势是什么?A. 功能越来越强大B. 体积越来越小C. 价格越来越便宜D. 更加智能化31. 嵌入式系统开发技术的基础是什么?A. 操作系统B. 微处理器C. 数字电路D. 硬件抽象层32. 嵌入式系统的典型应用领域有哪些?A. 消费电子产品B. 工业控制系统C. 汽车电子D. 医疗设备33. 嵌入式系统开发中,硬件和软件的协同设计重要吗?A. 非常重要B. 比较重要C. 不太重要D. 不相关34. 嵌入式系统中常用的编程语言有哪些?A. CB. C++D. Java35. 嵌入式系统的开发流程通常包括哪些阶段?A. 需求分析B. 设计C. 编程D. 调试36. 嵌入式系统中的实时性能对系统的要求是什么?A. 速度快B. 稳定性好C. 可靠性高D. 易于维护37. 嵌入式系统开发中,硬件描述语言(HDL)的作用是什么?A. 描述硬件结构B. 描述软件逻辑C. 描述系统行为D. 描述系统接口38. 嵌入式系统中,常用的调试工具有哪些?A. 调试器B. 版本控制工具C. 数据分析工具D. 系统性能分析工具39. 嵌入式系统开发中,如何保证软件的安全性和可靠性?A. 采用安全的编程规范B. 进行严格的测试和验证C. 使用高可靠性的硬件D. 实施有效的风险管理策略40. 随着物联网技术的发展,嵌入式系统在未来将会有哪些新的应用和发展趋势?A. 智能家居B. 自动驾驶C. AR/VRD. 无人机二、问答题1. 什么是嵌入式系统?请简述其特点。
汽车电子工程师招聘笔试题与参考答案

招聘汽车电子工程师笔试题与参考答案一、单项选择题(本大题有10小题,每小题2分,共20分)1、以下哪个部件不属于汽车电子控制单元(ECU)的输入信号?A、车速传感器B、发动机转速传感器C、氧传感器D、轮胎气压传感器答案:D解析:轮胎气压传感器通常不属于ECU的输入信号,因为它主要用于监测车辆轮胎的气压状态,而ECU主要负责控制车辆的发动机、传动系统等电子控制系统。
车速传感器、发动机转速传感器和氧传感器则是ECU常见的输入信号,用于获取车辆运行的重要数据。
2、在汽车电子系统中,下列哪种信号通常采用差分信号传输?A、车速信号B、点火信号C、制动信号D、CAN总线信号答案:D解析:CAN(控制器局域网)总线信号通常采用差分信号传输。
差分信号传输具有抗干扰能力强、信号传输距离远等优点,这使得CAN总线成为汽车电子系统中用于高速数据传输的理想选择。
车速信号、点火信号和制动信号通常使用单端信号传输。
3、在汽车电子控制系统中,ECU(电子控制单元)接收传感器信号并根据预设程序做出决策,下列哪个不是ECU常用的输出设备?A. 发动机喷油器B. 点火模块C. 车速表D. 刹车助力泵【答案】C. 车速表【解析】车速表是一个显示车辆行驶速度的仪表,并不是一个由ECU直接控制的输出设备。
ECU主要控制的是发动机管理系统中的组件如喷油器、点火系统等,以及一些安全系统的执行器,如刹车助力泵。
4、在CAN(控制器局域网络)总线通信协议中,错误帧由哪些部分组成?A. 错误标志和错误界定符B. 错误标志和仲裁场C. 错误界定符和CRC序列D. 错误标志和数据场【答案】A. 错误标志和错误界定符【解析】在CAN总线协议中,错误帧包括错误标志(Error Flag)和错误界定符(Error Delimiter)。
当检测到错误时,任何节点都可以发送错误帧来通知网络上的其他节点。
5、以下哪种传感器在汽车电子领域主要用于测量发动机的转速?A. 光电传感器B. 气压传感器C. 温度传感器D. 磁电传感器答案:D解析:磁电传感器(也称为霍尔传感器)在汽车电子领域广泛应用于测量发动机的转速。
嵌入式系统开发与应用

嵌入式系统开发与应用嵌入式系统开发与应用是现代科技领域的重要组成部分,它涵盖了从底层硬件设计到高层软件开发的一系列技术和方法。
嵌入式系统广泛应用于诸多领域,如消费电子、工业控制、汽车电子、医疗设备等。
本文将介绍嵌入式系统开发的基本概念、应用领域以及未来发展趋势。
一、嵌入式系统开发的基本概念嵌入式系统是指嵌入在其他设备或系统中,具有特定功能的计算机系统。
与传统计算机系统相比,嵌入式系统通常具有体积小、功耗低、成本低的特点。
嵌入式系统的核心是微处理器(如ARM、MIPS等)或微控制器(如8051、STM32等),以及与之配套的外设(如存储器、输入输出接口等)。
嵌入式系统开发的关键是将硬件与软件紧密集成,以实现特定功能。
硬件开发主要包括电路设计、PCB设计、嵌入式软件开发者对硬件的控制,以及常用的传感器、执行器和通信接口的选型和集成。
软件开发主要包括操作系统的选择和裁剪、驱动程序的编写、应用程序的开发,以及与硬件之间的交互和通信。
二、嵌入式系统的应用领域1. 消费电子:嵌入式系统广泛应用于智能手机、平板电脑、智能电视等消费电子产品。
这些设备要求高性能、低功耗以及良好的用户体验。
嵌入式系统在这些设备中的作用是负责处理各类用户操作、数据处理、多媒体播放、通信等功能。
2. 工业控制:嵌入式系统广泛应用于工业自动化领域。
它能够实现工业设备的监控、控制和运行管理。
嵌入式系统可以处理各种输入输出信号,与工艺设备和传感器进行通信,并对工艺过程进行控制和调节。
3. 汽车电子:嵌入式系统在现代汽车中起到了至关重要的作用。
它能够实现汽车引擎控制、车身电子控制、信息娱乐、驾驶辅助等功能。
嵌入式系统可以通过各种传感器获取车辆状态信息,同时与汽车中的各种模块进行通信。
4. 医疗设备:嵌入式系统在医疗设备领域应用广泛,如心脏起搏器、呼吸机、血糖监测仪等。
嵌入式系统能够监测病人的生理参数,同时控制和调节医疗设备的工作状态,以满足病人的实际需求。
嵌入式系统基础知识考试
嵌入式系统基础知识考试(答案见尾页)一、选择题1. 嵌入式系统的核心是什么?A. 中央处理器(CPU)B. 内存(RAM和ROM)C. 输入输出设备D. 操作系统和软件2. 嵌入式系统的硬件通常包括以下哪些组件?(多选)A. CPUB. 内存C. 存储器D. 显示屏E. 输入输出设备3. 以下哪个不是嵌入式系统的特点?(单选)A. 专用性强B. 可定制性高C. 功能强大D. 性价比低4. 在嵌入式系统中,通常使用哪种编程语言进行开发?(单选)A. JavaB. C/C++C. PythonD. JavaScript5. 嵌入式系统中的实时性是指什么?(单选)A. 系统能够在严格的时间限制内响应外部事件B. 系统能够处理大量数据C. 系统具有高度的可扩展性D. 系统具有高可靠性6. 嵌入式系统的开发流程通常包括哪些步骤?(多选)A. 需求分析B. 设计C. 编码D. 测试E. 维护7. 在嵌入式系统中,如何保证数据的安全性和完整性?(多选)A. 使用加密技术B. 使用防火墙C. 实施访问控制D. 定期备份数据E. 采用冗余设计8. 嵌入式系统在物联网中的作用是什么?(单选)A. 数据收集和处理B. 智能控制C. 互联网接入D. 无线通信9. 在嵌入式系统的调试过程中,常用的工具有哪些?(多选)A. 调试器B. 仿真器C. 版本控制系统D. 日志分析工具E. 系统监控工具10. 嵌入式系统的未来发展趋势是什么?(单选)A. 更高的性能B. 更多的连接性C. 更低的功耗D. 更强大的计算能力11. 嵌入式系统的特点是?A. 高度集成B. 低功耗C. 可移植性强D. 扩展性差12. 嵌入式系统通常用于什么领域?A. 大型计算机B. 小型计算机C. 消费电子产品D. 服务器13. 嵌入式系统中常用的操作系统有哪些?A. WindowsB. LinuxC. macOSD. Android14. 在嵌入式系统中,硬件和软件是如何协同工作的?A. 硬件负责数据处理,软件负责程序执行B. 硬件负责程序执行,软件负责数据处理C. 硬件和软件共同负责数据处理和程序执行D. 硬件和软件独立工作,不相互依赖15. 嵌入式系统中的实时性是指什么?A. 系统能够立即响应外部事件B. 系统处理任务的效率C. 系统的功耗低D. 系统的可扩展性好16. 嵌入式系统设计中,硬件和软件的划分依据是什么?A. 功能B. 性能C. 成本D. 可用资源17. 在嵌入式系统开发过程中,哪些步骤是必要的?A. 系统需求分析B. 硬件设计C. 软件编程D. 调试和测试18. 嵌入式系统中的存储设备通常有哪些?A. 硬盘B. RAMC. ROMD. CD-ROM19. 在嵌入式系统调试过程中,常用的工具和技术有哪些?A. 调试器B. 版本控制系统C. 性能分析工具D. 图形用户界面(GUI)工具20. 嵌入式系统的显著特点包括:A. 低功耗B. 高性能C. 可定制性D. 上下文感知21. 嵌入式系统通常用于哪些领域?A. 消费电子产品B. 工业控制系统C. 汽车电子22. 下列哪个不是嵌入式系统的组成部分?A. 硬件组件B. 软件组件C. 用户界面D. 外部设备23. 嵌入式系统中的实时操作系统(RTOS)具有哪些特点?A. 高精度计时B. 快速响应C. 无需用户干预D. 易于维护24. 在嵌入式系统中,硬件抽象层(HAL)的主要作用是什么?A. 提供硬件特定的接口B. 实现操作系统内核C. 进行系统级优化D. 管理系统资源25. 嵌入式系统开发中常用的编程语言有哪些?A. CB. C++C. JavaD. Python26. 嵌入式系统中的软件开发通常分为几个阶段?A. 系统设计B. 应用开发C. 硬件定制D. 测试与验证27. 在嵌入式系统调试过程中,常用的工具有哪些?B. 跟踪器C. 驱动程序D. 版本控制工具28. 嵌入式系统工程师应具备哪些技能和知识?A. 编程能力B. 系统设计能力C. 硬件知识D. 软件开发经验29. 下列哪个不是嵌入式系统常用的操作系统?A. LinuxB. VxWorksC. QNXD. Windows CE30. 嵌入式系统中的“嵌入式”一词意味着什么?A. 系统可以嵌入到更大的系统中B. 系统只能使用特定类型的硬件C. 系统不能进行远程更新D. 系统没有图形用户界面31. 在嵌入式系统中,哪种编程语言通常用于实时应用?A. CB. C++C. JavaD. Python32. 嵌入式系统设计中,硬件和软件之间的接口被称为?A. 数据总线B. 控制总线C. 通信总线D. 地址总线33. 嵌入式系统中的程序通常存储在哪里?A. 硬盘驱动器B. RAMC. ROMD. CD-ROM34. 在嵌入式系统中,硬件抽象层(HAL)的作用是什么?A. 提供硬件特定的功能B. 管理硬件资源C. 实现操作系统内核D. 连接应用程序和硬件35. 嵌入式系统的发展趋势包括哪些?A. 更高的性能B. 更低的功耗C. 更多的连接性D. 以上都是36. 嵌入式系统通常用于控制哪些类型的设备?A. 大型机B. 小型机C. 手机D. 微型计算机37. 嵌入式系统的基本编程语言包括哪些?A. 汇编语言B. C语言C. JavaD. Python38. 在嵌入式系统中,通常使用哪种类型的存储器?A. 随机存取存储器(RAM)B. 只读存储器(ROM)C. 闪存(Flash Memory)D. 硬盘驱动器(HDD)39. 嵌入式系统中的操作系统通常具有哪些特点?A. 多任务处理B. 强大的网络功能C. 高度可定制D. 高度并发40. 嵌入式系统设计中,常用的开发工具包括哪些?A. 集成开发环境(IDE)B. 仿真器C. 调试器D. 版本控制系统41. 在嵌入式系统开发中,硬件描述语言(HDL)通常用于:A. 编写应用程序代码B. 描述硬件结构和工作原理C. 进行软件调试D. 进行系统测试42. 嵌入式系统中的无线通信技术通常包括哪些?A. 蓝牙B. Wi-FiC. NFCD. 有线以太网43. 在嵌入式系统设计中,如何确保系统的可靠性和稳定性?A. 使用高质量的组件B. 优化软件代码C. 提供冗余设计D. 以上都是二、问答题1. 什么是嵌入式系统?请简要描述其特点。
汽车嵌入式系统的开发流程(汽车电子技术)
步骤8:返回步骤1.通过实时测试,获得反馈信息。 以上Matlab结合dSpace Targetlink展示典型汽车ECU开发流程。
7.2 模型搭建与算法仿真
7.2.1 功能设计(建模)
功能设计,即系统逻辑结构和技术结构的确定。用户需求分析是指 在系统开发的早期阶段,对于需求和限制条件的一种结构化的处理方法。 目的是从系统用户的角度准确地描述系统的逻辑系统结构。
(3)自动代码生成(Automatic Production Code Generation) 减少编程时间和手写代码错误; 模型与C代码相互协调; 统一的编码格式; 极少的错误率。
(4)ECU仿真测试(ECU Testing with Simulator) 硬件循环仿真测试; 更少的原型和测试装置、更低的测试成本; 系统全面快速的测试; 可靠性高、风险低。
现代汽车电子技术
2019/6/29
信号与信息处理研究所 丁山
1
第7章 汽车嵌入式系统的开发流程 7.1 汽车嵌入式系统的开发流程
车载嵌入式系统的开发总是把汽车嵌入式系统划分为子系统,如 ECU(硬件和软件)、传感器和执行器(硬件),然后对各子系统进行测试和确 认,进而集成一个完整的电子系统。
7.1.1 传统的开发流程
(3)生产产品代码。将模型转换为产品代码是开发过程中最关键的一 步。
(4)第四阶段:硬件在环仿真(Hardware-in-the-Loop, HIL)
(5)第五阶段:系统集成测试/标定
以Matlab结合dSpace Targetlink工具箱为例来说明上述的具体开 发步骤:
步骤1:用线性或非线性方程建立控制对象的理论模型;
基于团队协作开发带来的技术实现方法有: 基于模型的系统开发; 代码自动生成; 在线标定; 在线和离线诊断。个方面: ①技术规范体系和标准的逐步确定。 ②开发流程的逐步统一。 ③开发理念工具化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
输入信号由原有ECU通过旁路接口进行传递,并由ECU通过一个控制 流接口触发旁路函数的计算。当原有的ECU接收到旁路输出信号和检测其 拟真性后决定是否采用新输出值或转接到内部替代值。
常用的两种旁路技术工具:
ETAS公司的INTECRIO(如图6-12所示)和dSpace公司的MicroAutoBox (如图6-13所示)。
系统设计的错误不易发现; 软件与硬件协同调试困难; 排除错误花费时间较长; 模型实时性差; C程序移植性差。
7.1.2 V模式开发流程
可视化的V模式中,过程步骤和产品如图5-30所示,该过程覆盖了从设 计阶段的需求分析、功能设计与实现到组件、集成的测试再到最后的所有 工作。
V模式开发过程是如图5-31所示。开发过程为硬件和软件同时进行, 最后联合调试,如图5-32所示。
对于ECU能够处理的数据格式,Targetlink软件都能够提供相应的定标:2 底数幂定标;非2底数幂定标;含有0偏移限制或不含0偏移限制。如图6-15所 示。
Targetlink的主要特性和优点如表6-2、表6-3所示。
2019/6/29
现代汽车电子技术
45
7.4 硬件在环测试
硬件在环测试是指采用真实的控制器,被控对象或者系统运行环境部 分采用实际的物体,部分采用实时数字模型来模拟,进行整个系统的仿真测 试。
基于模型化的功能设计有助于了解系统的功能,从而尽可能完整且无 矛盾地描述系统功能,并且在仿真模拟测试、功能校正和优化中体现更大 的灵活性和便利性。
技术系统结构必须考虑各种制约因素,如技术的和经济的制约,组织 结构和制造技术的约束。通过对逻辑系统结构分析和技术系统结构描述确 定技术系统结构,如图6-7所示。
另外,TargetLink能够针对特定的微控制器使用其独特的指令集进行 优化,从而几乎完全省去繁重的手工编码。
一般而言,生成的代码总是定点计算类型。为了能让控制器始终进行 定点运算,必须对控制模型中所有变量进行大小和精度范围的设置,即定 标。
每个变量都必须根据其可能的大小来分配取值范围和数据长度。变量x和 它的整数表达式x’之间关系为:
基于团队协作开发带来的技术实现方法有: 基于模型的系统开发; 代码自动生成; 在线标定; 在线和离线诊断。
汽车嵌入式系统开发方法论上特点主要体现在以下三个方面: ①技术规范体系和标准的逐步确定。 ②开发流程的逐步统一。 ③开发理念工具化。
7.3 V模式的一般流程
V模式一般流程有以下几部分组成: (1) 第一阶段:功能需求定义和控制方案设计.现代方法中采用模型方式, 如信号流图的方式(Simulink模型)
通常情况下,只有被测试ECU是实物,其余部分尽可能运用高保真的 数学模型进行仿真。
由于总线技术的发展,现代汽车已经通过网络实现分布式控制功能。 而各个ECU之间的交互作用增加,同时,网络支持多种总线系统,这些都 又可能成为潜在的错误来源。
• 高效率的C代码生成; •支持子函数不同计算频率的系统和OSEK兼容控制系统代码生成; •Stateflow生成代码自动与Simulink模型生成代码整合; •可选择不同的编译器实现最理想的转化效率; •可以生成比标准C更有利的特定的带有汇编程序的代码。
TargetLink的应用开发流程如图6-14所示。
7.2.3 旁路技术
通过将快速原型硬件系统与所要控制的实际设备相连,可以反复研究使 用不同传感器及驱动机构时系统的性能特征。而且。利用旁路(Bypass) 技术(见图6-11)将原型电控单元或控制器集成到开发过程中,从而逐 步完成从原型控制器到产品控制器的顺利转换。
旁路技术是指原有的ECU依然起着主要作用,如原有的ECU必须提 供经过有效性验证的系统的基本函数,运行所有的传感器和执行器,以及 支持到实验系统的旁路接口。
逻辑系统要求可分为功能性和非功能性系统要求;
逻辑系统要求是用参与开发过程的工程学科的语言来表达的。图 形化标志,适合于基于模型的逻辑系统的描述。比如结构框图和状态 自动机。
为了实现功能控制要求抽象化描述,就是建立一个数学模型。 图6-6所示的各个具体的功能模型可以由结构图来表示。方框表示转 换环节,可分为开环/闭环控制器模型、执行器模型、被控对象模型、 设定点发生器和传感器模型、驾驶员、运行环境。
普通采用的嵌入式系统的开发流程大多是自发的,不成系统的。
该流程的主要缺点
直到台架实验,控制器才真正与被控对象结合; 单元调试阶段,软、硬件的错误往往交织在一起; 由于软件采用手工编制的方式,错误的排除比较困难; 系统仿真阶段和实施阶段脱离; 程序的可读性、可继承性、可移植性不够好。
传统的ECU开发过程有以下缺陷;
开发流程:建立离线仿真模型,进行离线仿真;其次,在离线仿真通 过后加上I/O接口,修改为实时仿真模型;再次,为目标ECU生成目标代码, 并转换为可执行代码。最后,下载到实时内核进行实时仿真。如图6-10所示。
以Matlab为例,与实物的I/O接口是通过Simulink中的Real-Time Windows Target模块库提供I/O接口模块实现的。
功能设计,即系统逻辑结构和技术结构的确定。用户需求分析是指在 系统开发的早期阶段,对于需求和限制条件的一种结构化的处理方法。目 的是从系统用户的角度准确地描述系统的逻辑系统结构。
逻辑系统结构描述的是抽象的结果,即系统和功能的抽象逻辑模型。 如图6-5所示。
逻辑系统要求可从两方面进行描述: 描述应该具有的系统特性; 描述不应该具有的系统特性。
TargetLink软件从Simulink控制模型生成C代码,首先将Simulink/Stateflow 模型转化成TargetLink模型,可以根据实际需求进行变量定标、算法优化、设 置代码生成选项等工作,基于TargetLink模型进行各种仿真测试分析,最终生 成C代码。
其生成C代码具有以下特点:
(5)虚拟标定(ECU Calibration with the Calibration system) 简单直观的操作; 利用CAN进行标定和参数检测。 传统开发流程和V模式开发流程的特点比较见表5-1.
Байду номын сангаас
7.2 汽车嵌入式系统开发的方法论
汽车ECU开发过程的基本特征; 汽车嵌入式系统开发强调的是系统级的解决方案; 由于系统级的功能往往是在分布式实现; 开发流程较长,因此强调团队协同开发。
软件开发是从软件需求分析开始,首先进行软件体系结构的分析和确 定。
7.2.2 快速控制原型(算法仿真)
快速控制原型,即控制系统的快速功能测试原型,是通过一定的技术 手段,在短时间内开发与控制器产品功能一致的测试用功能原型装置,通 过它的实物实验来检测和修改设计。
采用先进的控制系统建模工具进行建模,并生成代码,用其他控制器 (PC, compact PC, 单片机)临时代替将要开发的实际控制器,快速对控制算法 进行验证和测试,在设计阶段发现问题并解决问题。如图6-9所示。
图6-8给出了一个典型的开环、闭环汽车控制系统的技术体系结构。当 确定开环和闭环控制系统的技术系统结构时,必须明确设定点发生器、传 感器、执行器、ECU网络的具体实现方法,并在具体的技术系统结构上实 现系统的逻辑体系功能。
随着技术系统结构的全部确定,接下来就是组件和子系统的实现,主要 分为硬件组件的设计实现和软件组件的设计实现。
x = LSB x’ + offset ;
其中,LSB指对应x’的最低有效位(least significant Bit),offset是指给定的偏 移量。
TargetLink软件也提供了自动定标的功能。Targetlink在仿真同时自动搜 索所有变量的最大值和最小值,确定参数运算的范围,自动定标工具以此设 定变量的LSB和offset值。
V模式各个模块的作用; (1). 功能设计(Control Design) 统一的模型,减少错误可能和缩短开发周期; 对系统模型进行快速而可靠验证; 减少开发成本; 对系统测试,发动机、动力系统的模型能够在后续开发中重复使用。
(2)功能原型(Function Prototyping) 对控制原型快速可靠地实时测试以及最优化; 原型过程中集成了各种汽车总线; 完全利用原型替代控制器; 自动执行验证Matlab/Simulink中的模型。
闭环控制任务就是通过检测控制变量X,然后被控变量X与参考变量W 相比较。根据比较结果,调整变量X使其接近参考变量W,闭环控制的目的 是是控制变量X的值接近参考变量W,尽管存在由于干扰变量Z所导致的干
扰情况。
相应的开环控制任务是一个系统的一个或多个输入变量影响某个输出 变量使其符合系统设计的特征的过程。
(3)自动代码生成(Automatic Production Code Generation) 减少编程时间和手写代码错误; 模型与C代码相互协调; 统一的编码格式; 极少的错误率。
(4)ECU仿真测试(ECU Testing with Simulator) 硬件循环仿真测试; 更少的原型和测试装置、更低的测试成本; 系统全面快速的测试; 可靠性高、风险低。
7.3 自动代码生成
相比传统的手工编码方式,自动代码生成有明显的优势,两者的对比如表 6-1所示。典型的自动代码生成工具包括Matlab RTW, dSpace公司的 TargetLink、ASCET工具包等。
TargetLink是一款产品级代码生成软件。可以直接从 Matlab/Simulink/Stateflow框图生成代码,可靠性高,易读性好,可产生定 点运算代码,适合多种处理器和编译器。
(5)第五阶段:系统集成测试/标定
以Matlab结合dSpace Targetlink工具箱为例来说明上述的具体开发步骤: 步骤1:用线性或非线性方程建立控制对象的理论模型;
步骤2:用Matlab工具箱设计一原始控制方案。这些工具包括Control System Toolbox、Nonlinear Control Toolbox,Robust Control Toolbox,Opimization Toolbox.