中软卓越助力太原理工大学“中软杯”科技文化节
工程专业卓越工程师培养方案

工程专业卓越工程师培养方案目录一、培养目标 (2)1. 培养具有高水平的专业技能、创新能力和领导力的人才 (3)2. 培养具备工程实践能力、解决复杂问题能力和跨学科知识的复合型人才43. 培养具备工程伦理意识、社会责任感和国际化视野的优秀人才.5二、培养理念 (7)三、培养路径 (8)1. 课程体系建设 (9)1.1 专业核心课程体系 (11)1.2 专业方向特色课程体系 (12)2. 科研实践 (13)2.1 学术研讨与项目资助 (14)2.2 企业实习与合作项目 (16)2.3 国际交流与合作项目 (17)3. 创新设计 (18)3.1 创新设计竞赛与挑战 (18)3.2 创业孵化基地建设 (20)四、能力培养 (22)1. 专业技能能力 (23)2. 创新能力 (24)2.1 创造性思维 (26)2.2 问题分析与解决能力 (27)3. 跨学科知识能力 (28)4. 沟通与团队合作能力 (29)5. 工程伦理与社会责任能力 (30)五、评价体系 (32)1. 教学评价体系 (33)2. 科研成果评价体系 (35)3. 综合能力评价体系 (36)六、人才培养支撑 (37)七、持续改进机制 (39)1. 定期评估与反馈机制 (40)2. 学会创新与发展机制 (41)一、培养目标本专业卓越工程师培养方案旨在培养具有扎实的专业基础知识、工程应用能力、创新创业精神和良好职业素养的走出国门、领跑未来的卓越工程师。
具备雄厚的专业知识:掌握工程学原理、基本理论、核心技术和专业技能,能够熟练运用工程数学、物理、化学、材料学等科学知识解决实际问题。
精通工程设计与实践:掌握工程设计规范、标准和技术,能够独立进行工程设计、项目管理、施工组织和技术管理,并拥有较强的工程实践能力和解决问题的能力。
拥有创新思维与实践能力:培养学生对于新知识与新技术的敏感性和学习能力,鼓励学生积极参与科研项目,提升科研、创新和创业的能力,能够推动工程技术的进步和发展。
科技文化节颁奖典礼(新闻)
电信学部“东软杯”第三届科技文化节颁奖典礼暨“大连理工大学—东软”嵌入式雏鹰计划启动仪式圆满成功2013年3月14日,电信学部“东软杯”第三届科技文化节颁奖典礼暨“大连理工大学—东软”嵌入式雏鹰计划启动仪式在研教楼报告厅举行。
本次活动由大连理工大学电子工程与电气工程学部和东软集团大连有限公司联合举办,出席的嘉宾有……晚六点半,活动正式开始。
在回顾了历时2个多月的“东软杯”第三届科技文化节后,电信学部分党委副书记副部长杨雪岩副教授宣布了在本次科技文化节软件设计大赛一、二、三等奖及优秀奖获的奖奖名单。
由东软集团(大连)有限公司嵌入式软件事业部常务副总经理兼技术支持中心主任蒋韬博士、东软嵌入式软件事业部(大连)开发中心主任徐利老师、高级人力资源经理张斌老师,以及高级人力资源经理潘亮老师为获奖者颁发奖金、奖状、奖品并合影留念。
“……(从获奖者演讲稿中摘录一句)”提及本次软件设计大赛,获得一等奖的李裕曚同学这样说道。
他认为这样的比赛不仅锻炼了同学们的动手能力,鼓励同学们从日常生活出发学会思考,更强调了理论联系实践的重要性,从另一个侧面表明社会需要的是理论知识与动手能力并重的综合型人才。
在随后的东软先锋汇核心会员聘书授予仪式上,电信学部学生会副主席东软先锋汇主席宋萍同学对东软校园俱乐部进行了简要介绍,指出俱乐部的建设不仅是让东软集团能更好地与在校大学生交流,不断选拔优秀的人才充实企业自身,更是要通过构建这样直接稳固的桥梁,帮助在校大学生了解社会需求,为毕业生走入社会奠定良好基础。
在此之后,袁茂林老师和林鸿飞教授为东软先锋汇核心会员授发了聘书。
聘书授予仪式之后,电信学部分党委书记张晓华教授为企业嘉宾——蒋韬、徐利、袁茂林授予电信学部职业指导师称号。
为了让同学们对导师有更深入的了解,现场设置了观众和导师互动环节——对蒋韬、徐利和袁茂林老师进行现场访问,使得每位同学对于自己未来的职业规划更加明确。
“东软嵌入式雏鹰计划”启动仪式将活动现场的氛围推向了高潮。
校企合作再升级 太原理工大学设立“中软国际奖学金”

校企合作再升级太原理工大学设立“中软国际奖学金”4月9日,太原理工大学“中软国际奖学金”设立大会在迎西校区博学馆报告厅隆重召开。
太原理工大学副校长李晋平、太原理工大学软件学院院长陈俊杰、中软国际执行董事、高级副总裁,中软国际教育科技集团CEO唐振明、中软国际教育科技集团北京ETC总经理罗娅、中软国际教育科技集团校企合作部总监郭薇等双方相关领导及师生出席了本次大会。
致辞中,李晋平首先表达了对中软国际在太原理工大学设立奖学金的欢迎和感谢。
他指出,太原理工大学与中软国际签订战略合作框架协议的一年多来,双方恪守约定,真诚相待,共同发展,为开创校企合作的新局面不懈努力,尤其是双方都在人才培养创新方面进行了积极探索。
希望双方今后进一步加强合作,推动互惠互赢,为中国信息技术产业的腾飞,为培养高素质软件人才做出贡献。
随后,唐振明表示,能为中国的人才培养,尤其是软件工程高级人才培养做出应有的贡献,是中软国际更是自己的梦想,与太原理工大学的合作正是实现这一梦想的重要途径。
截至目前,中软国际已经与全国400多所高校建立了良好的合作关系,而太原理工大学作为211工程院校,更是中软国际重要的战略合作伙伴。
此次在太原理工大学设立“中软国际奖学金”,是中软国际对深化校企合作的首次尝试,希望能够不断推进校企合作模式创新。
同时,唐振明还希望软件学院的同学能够锐意进取、积极创新,争做适应IT行业未来发展的高端人才。
针对奖学金细则,郭薇宣读了《太原理工大学“中软国际奖学金”评审及管理办法》。
在现场,太原理工大学与中软国际举行了“中软国际奖学金”支票转赠仪式。
与此同时,软件学院2012级学生代表也在会上作了发言。
在奖学金相关环节完毕后,中软国际教育科技集团北京ETC副总经理周海向软件学院的同学详细讲解了IT行业的技术发展趋势以及首届“中软卓越杯”软件应用创意大赛相关情况,现场反应热烈。
甚至会后有同学在申请中软卓越校园大使时表示,周海老师的演讲使自己充分认识了软件行业,对未来充满信心。
大学生课外学术科技竞赛活动目录-太原理工大学现代科技学院
附表:大学生课外学术科技竞赛活动目录S类:1、世界大学生超级计算机竞赛(ASC)2、国际水中机器人大赛3、国际(美国)大学生数学建模竞赛4、ACM国际大学生程序设计竞赛5、飞思卡尔杯国际智能车比赛6、中国“互联网+”大学生创新创业大赛A类1、全国大学生“飞思卡尔”杯智能汽车竞赛2、中国大学生物联网创新创业大赛(原美新杯中国MEMS传感器应用大赛)3、全国大学生数学建模竞赛4、全国大学生节能减排社会实践与科技竞赛5、全国高校学生DV作品大赛6、全国大学生结构设计竞赛7、全国大学生化学实验竞赛8、全国大学生软件创新大赛9、全国大学生工程训练综合能力竞赛10、全国大学生电子设计竞赛11、全国大学生电子商务创新、创意及创业挑战赛12、全国大学生“西门子杯”工业自动化挑战赛(原全国大学生控制仿真挑战赛)13、全国大学生机械创新设计大赛14、全国大学生物理实验竞赛15、AUTODESK REVIT杯全国大学生可持续建筑设计竞赛16、全国大学生物流设计大赛17、全国大学生广告艺术大赛18、“挑战杯”课外科技作品竞赛19、“创青春”全国大学生创业大赛20、中国机器人大赛暨 RoboCup公开赛21、全国普通高校信息技术创新与实践活动(高校NOC活动)22、“未来之星”全国大学生视觉设计大赛23、全国大学生公益广告作品征集活动24、全国大学生艺术展演活动25、“中国软件杯”大学生软件设计大赛B类1、全国周培源大学生力学竞赛2、全国虚拟仪器设计大赛3、ACM全国大学生程序设计大赛4、中国教育机器人大赛(原中国智能机器人大赛)5、“博创杯”模块化机器人设计大赛6、全国大学生英语竞赛8、全国三维数字化创新设计大赛9、全国大学生焊接创新大赛10、全国大学生过程装备实践与创新大赛11、全国大学生基础力学实验竞赛12、全国高校GIS技能大赛13、中国大学生铸造工艺设计大赛14、全国大学生水利创新设计大赛15、ThinkQuest International CompetitionThinkQuest projects digital Media Application Development16、全国大学生物联网创新应用设计大赛17、全国ITAT教育工程就业技能大赛18、Honda中国节能竞技大赛19、瑞萨超级MCU模型车大赛20、全国“电脑鼠走迷宫”竞赛21、“长城脚下﹒建筑艺术博览园”全国大学生设计比赛22、外研社杯英语演讲大赛23、中译杯口译大赛24、山西省大学生化学实验竞赛25、“昆山杯”全国优秀大学生创业团队大赛26、环艺学年奖28、“兴晋挑战杯”课外科技作品大赛29、“创青春” 山西省大学生创业计划大赛30、全国机器人运动会31、全国高校健身气功比赛32、人工环境工程学科奖学金33、三一(中国)工程机械工业设计大赛34、“中国电机工程学会杯”全国大学生电工数学建模竞赛35、“蓝桥杯”全国软件和信息技术专业人才大赛(原“蓝桥杯”全国软件专业人才设计与创业大赛)36、全国大学生混凝土设计大赛37、“则泰杯”全国高校测绘学科大学生科技论文竞赛38、国际空中机器人大赛39、全国大学生职业生涯规划大赛40、全国大学生纱线设计大赛41、中国(国际)传感器创新大赛42、山西省大中学生武术锦标赛43、全国大学生海洋知识竞赛44、全国大学生工业设计大赛45、全国大学生地质技能综合应用竞赛46、全国高等学校采矿工程专业学生实践作品大赛47、“越隆杯”中国高校纺织品(面料)设计大赛48、“汉帛奖”中国国际青年设计师时装作品大赛49、“为中国而设计”全国环境艺术类大赛50、中国之星设计艺术大奖51、全国旅游纪念品设计大赛52、中国国际面料设计大赛53、“蓝星杯”全国大学生建筑设计方案竞赛54、高校大学生金相制样比赛55、“霍普杯”国际大学生建筑设计竞赛56、全国高等院校计算机核心技能与信息素养大赛57、“华为杯”全国大学生智能设计竞赛58、山西省大中学生定向越野锦标赛59、华北五省(市、自治区)大学生人文知识竞赛60、华北五省(市、自治区)及港澳台大学生计算机应用大赛61、华北五省(市、自治区)大学生机器人大赛62、全国并行应用挑战赛(原全国教育科研并行应用程序优化大赛)63、中国制冷空调行业大学生科技竞赛64、全国大学生信息安全竞赛65、绿色建筑创意全国邀请赛66、“深圳杯”山西省大学生数学建模竞赛67、“中软卓越”杯全国大学生Android应用创意大赛68、全国大学生网络虚拟运营创业专项赛69、中国大学生方程式汽车大赛70、全国大学生绿色建筑课程设计竞赛71、山西省大学生机器人大赛72、全国高校物联网应用创新大赛73、中国大学生服务外包创新创业大赛74、“台达杯”两岸高校自动化设计大赛75、全国大学生物联网设计竞赛(TI杯)76、“学创杯”全国大学生创业综合模拟大赛77、全国高等学校大学生测绘技能竞赛78、科研类全国航空航天模型锦标赛79、全国海洋航行器设计与制作大赛80、山西省大学生电子设计竞赛81、SuperMap杯全国高校GIS大赛82、“21世纪杯”全国英语演讲比赛83、山西省大学生艺术展演活动84、“晋商杯”大学生创业大赛C类1、省城青年创业大赛2、中英创业大赛3、山西省健身气功交流赛4、太原市数学建模竞赛(原省城数学建模联赛)5、全国高校环保科技创意设计大赛6、中国移动Mobil Market 百万青年创业计划7、中国国际动漫节8、全国大学生传统运动会9、靳埭强设计奖全球华人大学生设计比赛10、全国大学生海洋文化创意设计大赛11、全国大学生网络商务创新应用大赛12、“金蝶杯”全国大学生创业大赛13、冰心文学大赛14、“石狮杯”全国高校毕业生设计大赛15、全国高校市场营销大赛16、全国多媒体课件大赛17、浙江省大学生多媒体设计大赛18、全国数字媒体专业大学生科技作品竞赛19、全国商科院校商务谈判技能大赛(网络赛)20、全国信息技术应用水平大赛21、中国大学生计算机设计大赛22、中国商业地产摄影大展23、世界大学生影展24、千人摄影展25、山西省摄影艺术展26、国际商业艺术大展27、全国摄影艺术展28、平遥国际摄影大展29、中国凤凰国际摄影双年展30、中国武当(国际)摄影作品大展31、腾龙镜头杯中国大学生现代摄影大赛32、CCTV模特电视大赛33、中国模特之星大赛34、“临港”杯环球时尚超级模特大赛35、敦煌国际服饰模特艺术节国际职业模特大赛36、寰球旅游美皇后大赛37、国际新星模特大赛38、山西青年精英模特大赛39、地球小姐40、世界广告模特大赛41、“同至人杯”华谊新面孔影视模特大赛42、哥本哈跟皮草幸福代言人大赛43、世界模特小姐大赛44、世界旅游小姐45、中国职业模特大赛46、东方国际模特大赛47、新丝路模特大赛48、环球时尚模特大赛49、化妆造型大赛50、全国发型化妆大赛51、中国影视与时尚造型化妆大赛52、艾莱依CCTV2《时尚中国》“化妆造型”设计比赛53、巴黎世界杯发型化妆大赛54、“美丽盛典”中国国际时装周彩妆设计大赛55、上海东卫视——美丽学院化妆大赛56、“四美国际杯”发型化妆大赛57、天山南北新疆主题美术展58、全国中国画作品展59、风华三晋山西省青年美术展60、挖掘与发现全国油画艺术展61、山西省美术作品展62、山西省青年美展63、山西省油画写生展64、山西省水彩画展65、全国中国画作品展66、山西省工笔画作品展67、山西省写意画作品展68、山西省山水画作品展69、山西省人物画作品展70、全国漆画展71、传统工艺美术精品展72、中国佛山国际城市雕塑73、中国厦门漆画展74、湖北当代漆画展75、“从河姆渡走来”国际漆艺展76、广州漆画双年展77、扬州漆器精品展78、中日韩现代陶艺新世纪交流展79、陶瓷艺术类创新评比大奖赛80、中国当代陶瓷艺术大展81、陶雷青春石湾杯全国大学生陶艺大赛82、“恒福杯”茶具创新设计大赛83、“指南针计划”中国古代发明创造动漫大赛84、“动漫北京”首届民族原创动漫形象大赛85、山西省青少年预防艾滋病漫画动漫作品征集评选活动86、中国国际广告节“中国元素国际创意大赛”87、动画学院学院奖88、中国(北京)国际大学生动画节也称“白杨奖”89、山西省动漫艺术节90、全国数字艺术大赛91、“金麒麟”动漫艺术节92、wocom数字艺术大赛93、全国大学生原创动画大赛94、金龙奖原创动画漫画艺术大赛95、全国青年现代剪纸艺术设计大赛96、“火凤凰”杯第五届全国美术与艺术设计大赛97、中国高等院校设计艺术大赛98、台湾国际学生创意设计大赛99、中国家居设计大赛100、全国高校室内设计大赛101、“新人杯”全国青年学生室内设计竞赛102、“WA·总统家杯”建筑手绘设计大赛103、中国手绘艺术类大赛104、中国国际空间环境艺术类大赛105、名家具设计大赛106、山西省室内设计大赛107、“世界学生之星”国际包装设计奖108、中国包装“创意设计”大奖赛——“设计之星”奖109、山西省高校平面设计展110、白金创意全国大学生平面设计大赛111、全国大学生外贸单(纺织)职业能力大赛112、“金丽杉”杯羊绒时装设计大赛113、中国家居服创新设计大赛114、全国大学生“云蝠杯”纱线设计暨“金辉杯”面料设计大赛115、全国高职高专学生纺织面料检测技能大赛116、全国高职高专学生纺织面料设计大赛117、中国包装创意大赛118、中国休闲装设计精英大奖赛119、中国国际家用纺织品创意设计大赛120、高校平面设计暨“双合成”杯包装设计展121、全国高职高专学生服装制版与工艺技能大赛122、“威丝曼”中国针织时装设计大赛123、中国国际时装创意设计大赛124、“COCOON”中国国际女装设计师大奖赛125、中国(大朗)毛织服装设计大赛126、“CFW”中国服装设计师网络设计大赛127、中国国际大学生家纺织品设计大赛128、“从洛桑到北京”国际纤维艺术年展129、中国国际经编设计大赛130、全国设计艺术大奖赛131、中国当代纤维艺术展132、山西省职业装设计大赛133、中国时装设计新人奖134、中国国际院校师生设计大赛135、全国高校优秀毕业生服装设计大赛136、全国时装画艺术大赛137、中国家居服装设计大赛138、中国真维斯杯休闲装设计大赛139、大连杯中国青年时装设计大赛140、东华杯中国青年时装设计大赛141、全国高校服装表演专业优秀学生邀请赛142、北京电影学院学院奖143、银河创业训练营活动144、“阳光杯”高校行政管理专业辩论赛145、山西省“黄河律师杯”大学生模拟法庭大赛146、中国大学生广告艺术节学院奖147、联想平板笔记本Yoga创意营销大赛148、中国BIM技术交流暨优秀案例作品推荐会。
太原理工大学软件开发实训个人总结
太原理工大学软件开发实训个人总结太原理工大学软件开发实训个人总结个人总结俗话说,实践是检验真理的唯一标准,这句话说的很是恰当。
在实训的这四个星期中,在各种各样老师的辅导和小组同学们精诚合作中我学会了很多小东西,同时了解了软件工程在现代软件开发过程中同的重要性,加深计算机网络了对软件工程所学知识的理解,初步掌握进行软件系统开发的基本,而且分析问题、解决实际问题的能力也了很大的提升,为后续课程的学习以及一定从事软件项目开发与管理工作打下了将来的基础。
我是一名新近大四的学生,纵观现在的就业形势,国家高校的扩招,世界大萧条的横扫,大学生应该有一种居安思危的紧迫感,特别是对已经已经度过两年大学的我而言,毕业并不是一个遥远的词汇。
宝剑锋从磨砺出,梅花香自苦寒来,缺乏了平时的锻炼,没有厚积更何况不能有薄发。
首先我得有思想上的紧迫感,在补习学校学习的都是理论知识,实战经验则是少之又少。
综合能力强的人才才是这个社会需要较弱的,成长成为社会需要的人才是我的个人奋斗目标。
有了强大的精神动力,有了坚如磐石的毅力,相信如愿并不遥远。
首先对于编码第三阶段,虽然早些被强调过了很多遍但是我一直没有很深的体会。
但在这次参与编码的过程对这点感慨颇深。
下述从一开始关于软件功能的定位到具体实现过程中,和其他序列人员之间人员的沟通协调必不可少。
代码的编写也不是一蹴而就,而是随着开发的过程中不断需要进行进行动态平衡。
其次在测试吃尽了苦头才深刻认识到这点。
不管是最开始的单元测试还是最后的集成测试,这些测试都必须进行不止一次。
在测试中十分痛苦的是,有错却无法判断错在何处。
我发现有一些偏差是和开发人员的编程水平和习惯有很大关系的。
拿我自己举例,在测试过程中才中总是不太规范,导致代码最后格式混乱,也空耗了大量的时间。
当然这次课程实践最重要的斩获就是我们完整模拟培训课程了一次软件开发的流程,从最开始的需求分析,到最后的测试,用户手册的编写都全程参与。
山西广播电视台_企业报告(业主版)

盖传输服务结果公告
络股份有限公司
1108.6
2022-12-06
TOP2 TOP3
山西广播电视台广播电视节目覆 东方有线网络有限
盖传输服务
公司
山西广播电视台包 1 项目
北京流金岁月传媒 科技股份有限公司
288.0 265.0
2022-12-09 2022-12-09
TOP4 广播电视节目覆盖传输服务
企业基本信息
单位名称: 营业范围:
山西广播电视台 广播、电视舆论宣传与监督制作、播出广播、电视节目、新闻、信息相关产业经营广播、电 视研究、业务培训相关社会服务
一、采购需求
1.1 总体指标
近 1 年(2022-09~2023-08):
项目数(个)
443
同比增长:57.1%
项目总金额(万元)
(不含费率与未公示金额)
本报告于 2023 年 08 月 14 日 生成
1/29
近 3 年(2020-09~2023-08):
1.3 项目规模
1.3.1 规模结构 近 1 年山西广播电视台的项目规模主要分布于 10-100 万区间,占项目总数的 47.7%。500 万以上大 额项目 8 个。 近 1 年(2022-09~2023-08):
列微视频项目项目
限公司
158.9
2023-01-03
TOP6
山西广播电视台《晋风晋韵》系 山西中晋视纪文化
列微视频项目
传媒有限公司
149.9
2023-01-03
本报告于 2023 年 08 月 14 日 生成
4/29
重点项目
项目名称
中标单位
中标金额(万元) 公告时间
TOP7
第五届“中国软件杯”大学生软件设计大赛圆满落幕唱响青春 筑梦未来

第五届“中国软件杯”大学生软件设计大赛圆满落幕唱响青春筑梦未来作者:杨光来源:《中国信息化周报》2016年第34期8月22日-27日,由工业和信息化部、教育部、江苏省人民政府联合主办,中国电子信息产业发展研究院、江苏省经济和信息化委员会、江苏省教育厅、教育部高等学校计算机类专业教学指导委员会联合承办的第五届“中国软件杯”大学生软件设计大赛决赛(以下简称“大赛”)在南京成功举办,落下帷幕。
五年耕耘,五年收获,大赛有太多精彩、太多激动人心的时刻值得回味:决赛答辩现场,参赛选手们对答如流,侃侃而谈,博得阵阵掌声;招聘会上学子们勇于展示,英姿飒爽,频获青睐;投融资对接会上,队员们口吐莲花,雄心勃勃,满载而归。
创新人才辈出整体水平高本届大赛以“点燃软件梦想,共创世界未来”为主题,大赛历时1年,共有来自31个省市及地区的4093支队伍积极参与。
晋级决赛的219支队伍历时三天,历经激烈的三轮角逐,最终决出特等奖队伍1支,一等奖16支,二等奖60支,三等奖141支。
此外,大赛另设表现奖6支、创新奖6支、最佳指导教师奖10人、最佳学校组织奖30支、最佳地方组织奖10支,企业突出贡献奖11支。
来自四川大学的“Shadow-Team”代表队,以其优异作品,在众多优秀赛队中脱颖而出,荣获本届大赛特等奖,赢得8万元的大赛最高项目奖金。
8月26日晚上,大赛颁奖典礼在南京航空航天大学新大学生活动中心隆重举行。
中国工程院院士倪光南、中国科学院院士何积丰、工业和信息化部信息化和软件服务业司司长谢少锋、教育部职业教育与成人教育司副司长王扬南、工业和信息化部信息化和软件服务业司巡视员李颖、中国电子信息产业发展研究院院长卢山、江苏省经济和信息化委员会副主任龚怀进、江苏省教育厅副厅长丁晓昌、南京航空航天大学书记郑永安、南京航空航天大学副校长黄志球、南京信息职业技术学院副院长杜庆波、北京航空航天大学计算机学院院长吕卫锋;来自各经信委、教育厅的领导和来自高校的众多评审专家;以及来自中国民航信息网络股份有限公司、用友网络科技有限公司、同方股份有限公司、石化盈科信息技术有限责任公司、东软集团股份有限公司、金山WPS 、江苏国瑞信安科技有限公司、广州中望龙腾股份有限公司、天津南大通用数据技术有限公司、南京擎天科技有限公司、江苏远望神州软件有限公司等软件骨干企业的代表参加了颁奖典礼。
智绘青春 数创未来

智绘青春数创未来作者:杨光来源:《中国信息化周报》2019年第27期百舸争流,奋楫者先;千帆竞发,勇进者胜。
7月18 日,第八届“中国软件杯” 大学生软件设计大赛总决赛(以下简称“大赛”)及颁奖典礼在中国(南京)软件谷科创城圆满落下帷幕。
本届大赛已历时1年,共有来自31 个省市及地区的5254 支队伍积极参与, 204 支队伍在现场经过激烈角逐,最终决出特等奖队伍2支,一等奖20支,二等奖80支,三等奖 101支。
最佳指导教师奖22人,最佳学校组织奖队伍61支、最佳地方组织奖队伍15支。
中国民航信息网络股份有限公司、中国(南京)软件谷、同方股份有限公司、东软集团股份有限公司、航天信息股份有限公司、北京课工场教育科技有限公司、新华三集团股份有限公司、百度在线网络技术(北京)有限公司、北京点石通科技有限公司、中兴通讯股份有限公司、南瑞集团有限公司等14家企业获得企业突出贡献奖。
南京航空航天大学“手打标签”队和长春工业大学“灵境”队以其优异作品,在众多优秀赛队中脱颖而出,荣获本届大赛特等奖,共赢得8万元的项目奖金。
中国工程院院士倪光南、工业和信息化部信息化和软件服务业司司长谢少锋、教育部职业教育与成人教育司副司长谢俐、江苏省人民政府副秘书长张乐夫、江苏省工业和信息化厅副厅长池宇、中国电子信息产业发展研究院副院长刘文强、江苏省工业和信息化厅副巡视员李裕桃、南京航空航天大学副校长黄志球、北京理工大学计算机学院院长黄河燕、中国(南京)软件谷管委会主任谢祖国,中共雨花台区委常委、区政府常务副区长蒋冰,中国(南京)软件谷管委会副主任黄敖齐、中国(南京)软件谷管委会副主任彭金斌,以及来自全国各地工业和信息化主管部门和教育主管部门的领导,对本届大赛提供大力支持的企业家代表、媒体代表们共近千人出席颁奖典礼。
大赛颁奖典礼在线直播平台点击观看数量达百万人次。
激发创新潜能培育软件人才创新已成为融入大赛血脉的基因。
“中国软件杯”大学生软件设计大赛连续八年成功举办,对释放软件人才创造力,培育产业发展新动能,发挥了积极作用,已形成显著的工作成效和广泛的社会影响。
中国软件杯”中国软件设计大赛活动流程

中国软件杯”中国软件设计大赛活动流程下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!1. 活动简介。
中国软件杯是中国软件设计大赛的别称,是由中国计算机学会主办的一项旨在推动软件技术发展和人才培养的重要赛事。
学校科技节的活动方案
学校科技节的活动方案目录一、活动背景与目的 (2)1.1 科技节的意义 (2)1.2 活动目标 (3)二、活动主题与时间 (4)2.1 主题设定 (4)2.2 活动时间安排 (5)三、活动内容与形式 (5)3.1 科技展览 (6)3.2 科技竞赛 (8)3.3 科技讲座 (9)3.4 其他活动形式 (10)四、活动组织与参与 (11)4.1 组织机构设置 (12)4.2 参与人员 (12)4.3 各部门职责 (14)五、活动宣传与推广 (15)5.1 宣传方式 (16)5.2 宣传渠道 (17)5.3 宣传效果评估 (18)六、活动预算与资源支持 (19)6.1 预算编制 (20)6.2 资源支持 (20)七、活动评估与总结 (22)7.1 活动效果评估 (22)7.2 活动经验总结 (23)一、活动背景与目的随着科技的不断发展和创新,培养学生的科技素养和创新精神已成为现代教育的重要任务之一。
为了响应这一号召,我校决定举办科技节活动,旨在进一步激发学生们的科技创新热情,提高学生的动手实践能力,培养科技创新型人才,营造浓厚的校园科技氛围。
本次活动将为学生提供一个展示科技创新成果、交流学习心得的平台,同时增强学生对前沿科技的认知与兴趣,从而推动学校科技教育的发展。
通过此次活动,我们期望能够激发更多学生的创新潜能,为培养未来的科技创新人才打下坚实的基础。
1.1 科技节的意义科技节作为学校文化的重要组成部分,旨在通过一系列丰富多彩的活动,激发学生对科技的兴趣和好奇心,培养他们的科学素养和创新精神。
科技节也是展示学校科技教育成果的重要平台,有助于提升学校的知名度和影响力。
科技节为学生提供了一个亲身体验科技魅力的机会,通过参与各种有趣的科技实验、科技作品制作等活动,学生可以直观地感受到科技的魅力,从而培养起对科学的浓厚兴趣。
科技节是培养学生创新思维的重要途径,在科技节期间,学生可以自由发挥想象力,进行各种科技创新和实践。
大学生就业指导中软”实力影响分析
大学生就业指导中软”实力影响分析作者:胡芹龙董杉来源:《赤峰学院学报·哲学社会科学版》 2014年第7期芹龙,董杉(成都理工大学环境与土木工程学院,四川成都 610059)摘要:素质教育不仅是大学生就业创业的核心与灵魂,也是我国高等教育事业发展的一项重大任务。
为使高校教育工作者准确把握素质教育对未来大学生就业创业的实际影响,有效地开展大学生思想素质教育,积极探索大学生思想素质教育的有效途径,对未来大学生就业创业发展具有非常重要的现实意义。
关键词:大学生软实力;思想素质教育;就业创业中图分类号:G646文献标识码:A文章编号:1673-2596(2014)07-0252-02近年来大学生就业问题一直受到高度重视,大学生就业困难户日益增多,政府的政策引导、高校的就业指导、家长的积极斡旋及学生不厌其烦的应聘,都是为解决大学生就业问题所做的积极应对。
在全国加强和改进大学生思想教育工作会议上,胡锦涛总书记指出:“培养什么人,如何培养人,是我国社会主义教育事业发展中必须解决好的根本问题,为培养中国特色社会主义事业建设者和接班人,不仅要大力提高大学生科学文化素质,更要大力提高他们的思想政治素质。
”可见要解决大学生就业问题,为国家培养新一代建设者和接班人,思想素质教育就毋庸置疑地成为了大学生教育的核心与灵魂。
一、大学生“软实力”素质的内涵高素质的体现是一种情绪的智慧,主要是指人在情绪、感情、意志、耐受挫折等方面的品质,包括信心、恒心、毅力、忍耐、直觉、抗挫力、合作精神等一系列与人的素质有关的感情心理素质和处理情绪的能力。
当代大学生“软实力”素质的内涵是指大学生思想、精神、信仰、追求等集中一体的没有办法用证书考核的能力。
通过对大学生思想、精神、信仰、追求的了解做出正确的指导,从而使他们无论是从思维能力、沟通能力、表达能力、领导力、快速学习能力、团队协作能力、性格品质等方面得到极大的提升,最终提高他们的未来竞争力。
一种适用于胶囊机器人的肠道几何参数感知方法

计算机测量与控制!"#"$!$%!&"!!"#$%&'()'*+%('#',&-!",&(".!!#""$!#收稿日期 "#"$#"""$!修回日期 "#"$#""&%基金项目 国家自然科学基金!*""'*#$)&&")"$$,'"$先进制造技术山西省重点实验室开放基金!<+^^"#"%#%"$山西省重点研发计划!"#%(#$-$"%%&,"$中北大学校内人才支持计划!c<"#%)#)"%作者简介 周锦山!%((("&男&山西运城人&硕士研究生&主要从事胶囊机器人及其无线供能方向的研究%引用格式 周锦山&高晋阳!一种适用于胶囊机器人的肠道几何参数感知方法'+(!计算机测量与控制&"#"$&$%!&")""$"$#!文章编号 %&'%,*() "#"$ #&#""$#)!!-./ %#!%&*"& 0!1234!%%5,'&" 67!"#"$!#&!#$,!!中图分类号 8;"%"!(!!文献标识码 :一种适用于胶囊机器人的肠道几何参数感知方法周锦山% 高晋阳% "!%`中北大学动态测试技术国家重点实验室&太原!#$##*%$"`中北大学山西省先进制造技术重点实验室&太原!#$##*%"摘要 胶囊机器人被认为是实现肠道疾病微创诊查最具前景的器件&肠道的几何参数!即半径和厚度"感知对于机器人在未知的肠道环境中实现主动运动具有重要意义&然而现阶段胶囊机器人均不具备这一感知功能$为此提出一种基于扩张机构和薄膜压力传感器的肠道几何参数感知方法$通过在扩张机构末端安装薄膜压力传感器&测量不同扩张半径下肠道的收缩压力&并基于压力值和以本构方程为核心构建的感知模型&实现对肠道初始半径及厚度的感知$搭建实验平台对该感知方法测试发现)针对五段具有不同几何参数的离体猪肠道&可在%*G内完成对肠道几何参数感知&对于初始厚度的感知误差范围为#`#),!#`"$(P P&初始半径的感知误差范围为#`%)&!#`$$(P P%关键词 肠道几何参数$感知方法$胶囊机器人$扩张机构$薄膜压力传感器<,3,&'+&0,*.U'"#'&(0:G*(*#'&'(+5',+0,1)'&H"24"(*!*$+%.'8"="&^A.=+42G J D2%&N:.+42X D2I%&"!%`>6D6K[K X C D T H O D6H O X H L-X2D P41@K D G F O K P K268K1J2H S H I X&8D4X F D2!#$##*%&R J42D$"`>J D2W4[K X C D T H O D6H O X H L:Q U D21K Q@D2F L D16F O42I8K1J2H S H I X&8D4X F D2!#$##*%&R J42D"<=+&(*:&)R D7G F S K O H T H6G D O K1H2G4Q K O K Q6J KP H G67O H P4G42I P K Q41D S42G6O F P K26L H O O K D S4B42I P424P D S S X42U D G4U KQ4D I2H G4GH L6J K 426K G642D S Q4G K D G K G!>K2G42I6J K426K G642D S I K H P K6O417D O D P K6K O G H L O D Q4F G D2Q6J4132K G G4G H L I O K D6G4I24L41D21K L H O O H T H6k G D164U K S H1H V P H64H2426J K F232H Z2426K G642D S K2U4O H2P K26!?F6G H L D O&1D7G F S K O H T H6G Q H2H6J D U K6J4G G K2G42I L F2164H2!_H O6J4G O K D G H2&T D G K Q H2 6J K K W7D2Q42I P K1J D24G PD2Q6J42V L4S P7O K G G F O K G K2G H O G&D2426K G642D S I K H P K6O417D O D P K6K O G K2G42I P K6J H Q4G7O H7H G K Q!?X42G6D S S42I 6J42V L4S P7O K G G F O K G K2G H O G H26J K647G H L6J K K W7D2Q42I P K1J D24G P&6J K1H26O D164H27O K G G F O K H L426K G642K G42Q4L L K O K26K W7D2Q K Q O D Q4F G 1D2T KP K D G F O K Q!:2Q6J K7O K G G F O K D2Q G K2G42I P H Q K S D O K6D3K2D G6J K1H O K H L1H2G646F64U K K Y F D64H2&6J K42464D S O D Q4F G D2Q6J4132K G G H L 426K G642K G1D2T K G K2G K Q!:2K W7K O4P K26D S7S D6L H O P4G G K6F76H U K O4L X6J K7O H7H G K QP K6J H Q42L4U K K W V U4U H74I426K G642K GZ46JQ4L L K O K26I K H P K6O417D O D P K6K O G&D2Q6J K O K G F S6G G J H Z6J D66J K426K G642D S I K H P K6O417D O D P K6K O G1D2T K G K2G K Q H F6Z46J42%*G&D2Q6J K G K2G42I K O VO H O G H L426K G642D S O D Q4F G D2Q6J4132K G G D O K426J K O D2I K G H L!#`#),P P&#`"$(P P"D2Q!#`%)&P P&#`$$(P P"&O K G7K164U K S X!>'7?"(2+)426K G642D S I K H P K6O417D O D P K6K O G$G K2G42I P K6J H Q$1D7G F S K O H T H6$K W7D2Q42I P K1J D24G P$6J42V L4S P7O K G G F O K G K2G H O@!引言肠道疾病如溃疡*炎症*结直肠癌等是严重危害人类的顽症&据估计全球每年约新增一百八十万结直肠癌患者&这些疾病给个人和医疗系统带来了严重的负担'%(%早期筛查和诊治是降低治疗费用*提高患者生存质量的重要手段'"$(%目前用于辅助肠道诊查和治疗的主要医疗器械是插入式肠镜&然而检查时给患者带来的严重不适和多种并发症使其并不适合用于肠道疾病的普查',*(%微型胶囊机器人作为肠镜的替代品&有望应用于肠道的微创诊查&以克服肠镜检查时带来的不适和风险%现有的胶囊机器人通常具备两种功能模块)运动模块以及肠道环境感知模块%运动模块用于帮助机器人在湿滑黏弹的肠道环境中实现主动运动&目前可大致分为腿式*履带式*磁控式和仿尺蠖式四种类型)腿式机器人'&)(依靠机体四周的超弹性腿与肠壁之间的相互作用实现有效运动&但由于超弹性腿通常较细&在与肠壁接触时存在一定安全问题%履带式机器人'(%%(依靠花纹履带与肠壁之间的静摩擦力实现运动&但由于其尺寸固定&在面临管径变化的肠道环境时&会因为履带与肠壁间的接触压力不足&出现运动失效的问题%磁控式胶囊机器人'%"%,(依靠外部磁场的牵引实现主动运动&但由于磁牵引力较小&常常无法克服肠道中的摩擦阻力&另外&在诊查前需要灌肠使肠道处于液体充盈状态%仅尺蠖式机器人'%*%((在具备双向运动功能和肠道扩张功能的同时&又不存在安全问题%它的运动模块通常包括两个扩张机构以及一个平移机构&其中平移机构用于使机器人在肠道中实现双向运动&扩张机构用于扩张塌陷的肠道%!投稿网址 Z Z Z!0G01S X3B!1H PCopyright©博看网. All Rights Reserved.!!计算机测量与控制!第$%""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"",!#当胶囊机器人在肠道中进行病灶检查*施药*活检等工作时&往往需要扩张肠道&抵抗肠蠕动力'"#(&以稳定驻留在当前位置%并且由于肠道的半径变化范围较大!成人大肠半径变化范围为%*!$#P P &且从直肠到盲肠半径逐渐增大"&机器人还需要扩张肠道以获得足够的牵引力%因此&扩张机构是胶囊机器人获得与插入式肠镜相同诊查效果的必要机构%肠道环境感知模块用于感知肠道内的各种生理信息&是对胶囊机器人进行控制和进行疾病检查的基础%文献'"%(中&E![!N F 等人研制的一种可搭载在胶囊机器人上的&摄像机模块&其拍摄照片对肠道的覆盖率高达()g &且单次照片无线传输功耗仅为'`%PM %文献'""(中&;!!C 4等人通过在胶囊上集成一种压力传感器模块&能够有效监测到小肠的收缩速率和收缩压力%文献'"$(中&[`:S K W D 2Q O H G 等人通过在胶囊表面安装一种轮式里程计&依靠滚轮与小肠之间的相对滚动&使得胶囊能够实时提供从十二指肠到小肠的实际距离信息&以帮助病灶定位%文献'",(中&R !@!R D L L O K X 等人通过在胶囊上集成一个多电极电子舌传感器&能够有效监测肠道液体特性&以辅助诊断胃肠道疾病%肠道几何参数!即半径和厚度"的感知对于机器人在未知肠道环境中实现主动运动*病灶定位等功能均有重要意义%例如&结合前置摄像头&胶囊机器人可以基于几何参数对患者的肠道三维模型进行构建&标记出病灶位置&为后续的治疗和复查的等提供参考%同时&肠道半径和厚度的异常还能够反映出多种肠道疾病&如梗阻性病变*炎症性肠病和肿瘤等'"*(%然而&现有胶囊机器人均无法实现对肠道几何参数的感知%因此&本文提出了一种基于扩张机构和薄膜压力传感器的肠道环境感知方法&通过在胶囊机器人的扩张机构末端集成薄膜压力传感器&测量不同扩张半径下肠道产生的环向收缩力&结合本文构建的感知模型&可以实现对肠道几何参数的感知%其中&薄膜压力传感器尺寸仅为#*P Pi #`"P P %在$`$a 的额定工作电压下&传感器整体电路的功耗小于*PM &而胶囊机器人的工作功耗通常大于,##PM &因此该方法几乎不会增加胶囊机器人的整体尺寸和功耗%全文的整体结构如下)第一章对感知方法的原理进行了详细的介绍%第二章搭建了实验平台&测量了不同扩张半径下猪肠道产生的收缩力%第三章中&基于测量数据&对该感知进行了验证%并基于感知结果&对感知方法进行了优化%第四章总结%A !感知方法原理图%中展示了一种典型尺蠖式胶囊机器人的扩张机构'%((%扩张机构通常由一组丝杠螺母机构和三组多连杆机构构成%当丝杠在电机驱动下转动时&螺母沿丝杠轴线作直线运动%三组多连杆机构以等角度的方式铰接在螺母上&在螺母的带动下&可沿径向扩张%扩张机构的顶端安装有一枚接触装置&以增大与肠道的接触面积&保证安全%从扩张机构的结构可以看出&通过控制电机的转动圈数&可以对其扩张半径进行精准的控制%通过在接触装置中安装一枚薄膜压力传感器&能够有效测量出肠道的环向收缩压力%图%!一种典型的扩张机构图%的左上角展示了薄膜压力传感器的具体安装方法%接触装置可分为上中下三层&下端为底座&用于与多连杆机构的末端相连$上端为盖板&用于与肠道接触$薄膜压力传感器压在二者中间&通常还会在压力传感器力敏区域表面覆盖软膜&以确保传感器受力均匀&提高测量数据的准确性%通过测量多组肠道同一位置在不同扩张半径下的环向收缩压力&可以计算出当前的位置肠道的初始半径和厚度&实现对肠道几何参数的感知&具体感知原理如下)当机器人进入肠道后&控制扩张机构扩张&接触装置与肠道的接触状态如图"所示%接触装置总共会受到来自:*?和R 三个区域肠道的环向收缩压力&根据拉普拉斯定律&:区域肠道产生的环向收缩压强41可表示为)图"!扩张机构与肠道接触状态示意图41#"#($=!%"式中&=为被扩张后肠道的半径&"为此时肠道的厚度&($为肠道的环向应力%($可通过本构方程'"&(计算得到)($!4$"#E $4$"-A $4$!""!投稿网址 Z Z Z!0G 01S X3B !1H P Copyright ©博看网. All Rights Reserved.第&期周锦山&等)""""""""""""""""""""""""""""""""""""""""""""""""""""一种适用于胶囊机器人的肠道几何参数感知方法#""*!#式中&E $和A $是与肠道相关的常数&可通过单轴拉伸实验测得'"'(&4$为肠道的应变比&可计算为)4$#!=%=#"=#!$"式中&=#为肠道的初始半径%因此&式!%"可改写为以下形式)41#"#($=%=#=!"#=!,"式中&41*"和=可以通过扩张机构的半径=G 和所有压力传感器的测量值之和2计算得到&因此式!,"是关于初始半径=#和初始厚度"#的二元函数&并可改写成如下方程组)41%#"%#($=%%=#=!"#=%41"#""#($="%=#=!"#=>@"!*"!!通过采集多组同一位置肠道在不同扩张半径下的环向收缩压力&依次代入到关于=#和"#二元方程组中并求取平均值&便可以计算得到当前位置肠道的初始半径和厚度%关于=*"和41的具体计算过程将分别在章节%`%*%`"和%`$中给出%这一感知方法在实际场景中的具体应用流程如图$所示)首先&医生控制机器人运动到肠道中的指定位置并驻留$然后&通过电脑或上位机发出指令控制扩张机构扩张$接着&机器人的内置电路将对压力传感器的数据进行采集&并记录相应的扩张机构半径$之后&数据将通过无线传输芯片发送至体外的接收器&接收器将数据上传至电脑进行解算和显示$最后命令机器人移动至下一位置&并重复上述流程&从而完成对整个肠道几何参数的感知%图$!感知方法流程图A C A !被扩张肠道半径计算原理由于扩张机构特殊的形状&被扩张肠道的横截面并非一个标准的圆形&其形状主要与扩张机构中多连杆机构的数量有关%当前&胶囊机器人主流的扩张机构大多都具有三组多连杆机构&因此&被扩张肠道的横截面可看为一个六边形%而根据式!%"&在计算肠道环向收缩压力时&需要将其等效为一个圆形&如图,所示%图,左侧中&被扩张肠道横截面内圈周长(可计算为)(#$!M %-A "M %#槡$=G %A >@"!&"图,!被扩张肠道半径计算示意图式中&A 为接触装置的宽度&=G 为扩张机构的半径&M %已在图注进行标注%保持肠道的内圈周长(不变&将其转换为一个圆形&如图,右侧所示&则被扩张肠道的半径可计算为)=#("##槡$$=G -$A""#!'"A C B !被扩张肠道厚度计算原理由于含水量较高&肠壁组织具有准不可压缩性'")(&因此在计算过程中&假设肠壁的整体体积不发生变化&即扩张过程中肠壁的横截面面积不发生变化%由章节%`%可知&被扩张肠壁的横截面可等效为一个圆环&如图*所示&则初始状态下&该圆环的横截面积!可计算为)!###!=#-"#""%#="#!)"图*!被扩张肠道厚度计算示意图当肠道半径有初始状态=#扩张至=时&其横截面!并不会发生变化&此时具有以下等式关系)##!=-"""%#="#!!("!!因此&被扩张肠道的厚度"可计算为)"#%=-="-""#-"=槡#"!%#"A C D !被扩张肠道<区域环向收缩压力计算原理接触装置中的薄膜压力传感器一共会受到来自:*?和R 三个区域的环向收缩压力&如图&所示%其中:区域直接与接触装置接触&其产生的环向收缩压强会直接作用在接触装置上%:区域产生的环向收缩压力可计算为)2:#/:#!:#/:#"#=@!%%"式中&!:为:区域肠道的面积&@为接触装置长度&即:区域的长度%4:的方向为垂直于肠壁的切线并指向肠道的中轴线&但相较于肠壁的横截面周长&接触装置的宽度较小&4:的方向可等效为垂直于接触装置&因此&2:的方向也为垂于接触装置&如图&所示%由于肠道变形所产生的过渡区域和R &会通过:区域将压力作用在接触装置上%在计算过程中&可将这两个区域等效为一个等径的圆环&如图&左侧所示&等效圆环!投稿网址 Z Z Z!0G 01S X3B !1H P Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$%""""""""""""""""""""""""""""""""""""""""""""""""""""卷#""&!#图&!接触装置受力示意图的半径为*R 区域的最大半径&等效轴向长度M K Y 为$P P '"((%由于接触装置通常较薄!约为%!"P P "&?*R 区域的等效半径可看作与:区域的半径相等&因此&?*R 区域产生的环向收缩压强4和4R 约等于4:%?*R 区域产生的环向收缩压力2?!R "可计算为)2?!R "#/:#"#=#M K Y!%""式中&2!R "的方向同2:相同&因此&所有接触装置中&薄膜压力传感器所感受到的压力总值2计算为)2#2:-2?-2R !%$"!!则:区域产生的环向收缩压强4:与压力传感器的测量值2之间的关系可表示为)4:#2"#=#!@-"M K Y "!%,"B !实验设计B C A !实验装置实验转置总体可分为三个部分&如图'所示&其中)扩张装置用于采集不同扩张半径下肠道的环向收缩压力%所采集到的压力数据通过单片机:-R 外设采集并通过串口上传至电脑%最后使用@D 6S D T 对数据进行解算和显示%图'!实验装置整体设计"`%`%!扩张装置的设计如图)!D "所示&该扩张机构的结构与胶囊机器人的扩张机构类似&包含一组丝杠螺母对以及四组连杆机构!在实验过程中发现&相较于采用三组连杆机构&四连杆机构能够使肠道被扩张得更加均匀&因此在这里四组连杆机构"%丝杠两端使用轴承固定在亚克力板中&丝杠长度为$*1P &外径)P P &两端螺纹旋向相反&螺纹间距为"P P %丝杠顶端紧配有一枚转轮&用于控制丝杠转动%螺母直径约""P P &表面设置有铰接点&用于铰接连杆%连杆装置中的每支连杆长*,P P &每个连杆装置的末端都安装有一枚接触装置%一个法兰被固定在顶端的亚克力板上&与丝杠同心&用于固定猪肠道%扩张装置的扩张半径=f 可通过转轮进行精确控制&其完全收缩状态下半径约为%"`&P P &完全扩张后半径超过,*P P &完全能够满足实验需求%图)!扩张装置设计图"`%`"!接触装置设计接触装置如图)!T "所示&从外到内依次为;f 板*;a R 软垫*薄膜压力传感器以及底座%;f 板直接与肠道进行接触&其主要功能为增大接触装置与肠道的接触面积&使传感器能够感受到更大的肠环向收缩压力%;a R 软垫粘贴在;f 板与传感器之间&面积与传感器的力敏区域相同&其主要目的是使压力传感器受力更加均匀&提高测量的准确性%本次实验所选用的薄膜压力传感器为单点压阻型传感器&内阻随着受力的增大而减小&量程为#`#$!"`*9&内阻变化范围约为")#!$`*3%%底座用于与连杆机构连接%"`%`$!实验装置整体电路设计实验装置整体电路设计如下)由于所使用的薄膜压力传感器为压阻型&因此采用一枚%#3%的电阻进行分压&并且并联了一枚#`%)_的电容用以过滤掉高频干扰%压力传感器的输出电压使用>8@$"_%#$]R 8&单片机的%"位:-R 外设进行采集&采集后的数据进行编码后通过单片机的]>"$"串口上传至电脑并进行记录%整个电路采用稳压芯片:@>%%%'提供$`$a 的稳压直流电%B C B !薄膜压力传感的标定由于每一枚薄膜压力传感器的特性都不相同&因此在实验前搭建了装置对传感器进行标定&如图(所示%标定装置可分为两个部分)圆杆和支架%圆杆上端的圆台用于放置砝码&圆杆下端与薄膜压力传感器的力敏区域接触&支架则用于帮助圆杆定位%在传感器的上下两侧均铺有;a R 软垫&以保证传感器受力均匀&提高标定结果的准确性%标定装置的整体电路与"`%章节中实验装置的相同&传感器的输出电阻最终上传至电脑记录%四枚传感器的标定结果如图%#所示&使用单项;H Z K O 函数对传感器内阻'和压力2进行拟合&及拟合结果为)!投稿网址 Z Z Z!0G 01S X3B !1H P Copyright ©博看网. All Rights Reserved.第&期周锦山&等)""""""""""""""""""""""""""""""""""""""""""""""""""""一种适用于胶囊机器人的肠道几何参数感知方法#""'!#图(!标定装置设计'%#%"`'$#2%%`#$''"#%"`&##2%%`%*"'$#%#`(##2%%`"%$',#%"`'*#2%%`>@#('!%*"四个拟合式的决定系数分别为#`(()(*#`(((&*#`(()%和#`(($*&拟合效果较好&保证了实验的准确性%图%#!压力传感器标定及拟合结果B C D !实验过程及数据实验选取的猪肠道来自一头重约%,#3I 的猪'$#(&猪在宰杀后立刻将肠道取出并放入冷藏的生理盐水中&直至实验时取出%实验前&猪肠道本构方程中的参数E $和A $通过单轴拉伸法确定&具体流程如下)选取多段肠组织样本&组织表面标记四个墨点&两端使用拉钩固定&并可在其径向方向上施加拉力%在拉伸肠组织的过程中&通过墨点的位移记录肠组织的形变量%最后将拉力值与形变量进行拟合得到参数E $和A $%实验分别测得)E $d%#&`,3;D &A $d%$`(%3;D%具体实验过程如下)首先&截取一段约"*1P 猪肠道并使用游标卡尺测量肠道的初始半径=#与初始厚度"#$然后&将其一端用扎带固定在扩张装置的法兰上&另一端自然下垂$接着&转动转轮扩张肠道&每转动八分之一圈停止约*G以记录此时传感器的压力数值&四枚传感器的测量值之和即为当前肠道的环向收缩压力2&每次共转动%`*圈&即采集%"组数据$最后&更换具有不同初始半径和厚度的肠道并重复上述过程&首次实验过测量了三段具有不同几何参数的猪肠道&对其分别编号为;/%*;/"和;/$&具体测量数据见表%%表%!三组猪肠道实验数据肠道几何参数;/%;/";/$=#d %)!%*P P &"#d $!"#P P =#d %(!%%P P &"#d "!"*P P =#d %'!%(P P &"#d"!*#P P 实验数据编号=+P P 2+9=+P P 2+9=+P P 2+9%%(!%&#!$$"#!&'#!"(%'!"##!%*""#!&'#!($"%!(*#!*,%(!%&#!&$$"%!(*%!)$"$!#'#!)#"#!&'%!$*,"$!#'"!&#",!#'%!"%"%!(*"!%**",!#'$!"$"*!##%!)&"$!#'"!(*&"*!##,!","*!)&"!""",!#'$!)#'"*!)&,!(""&!&&"!'%"*!##,!,*)"&!&&*!)*"'!,%$!#%"*!)&*!$%("'!,%&!&(")!%$$!*$"&!&&*!),%#")!%$'!,#")!)%$!)&"'!,%&!'(%%")!)%)!#%"(!,&,!,(")!%$'!*,%""(!,&)!&($#!#'*!%"")!)%)!"#值得注意的是&由于实验所选用的扩张装置装有四组连杆机构&因此&被扩张肠道的横截面积为八边形&式!'"应改写为)=#槡""!=G %A ""-"A #!%&"D !感知方案验证及优化D C A !感知方法验证基于表%的实验数据对感知方法进行验证&将每段肠道所测量得到的%"组数据&依次两两代入至方程组式!*"中&然后将所得结果再求取平均值%%"组数据一共可以解算得到%%组肠道的初始半径=#和厚度"#%感知结果如图%%所示&其中横坐标8表示参与解算的数据组数&G =和G "分别代表初始半径和厚度的感知误差%%"当仅有两组数据参与解算时&对肠道初始半径的感知误差都较大&三段肠道初始半径的感知误差G =分别为#`$()P P *#`)%"P P 以及#`(&)P P %而随着参与解算数据量的增加&感知误差有了明显的下降&当数据量8从"组增加至&组后&感知误差G =明显下降&分别为#`#&,P P *#`#%)P P 以及#`%""P P %""由于肠道厚度较薄&因此该感知方法对于肠道初始厚度的结算误差相对较大&当仅有两组数据参与解算时&三段肠道初始厚度的感知误差G "较大&分比为%`#$#P P *!投稿网址 Z Z Z!0G 01S X3B !1H P Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$%""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"")!#图%%!三组猪肠道初始半径和厚度的感知结果以及感知误图%"!三组猪肠道环向收缩力理论值与测量值%`"(#P P 以及%`$,#P P %同样随着参与解算数据量的增加&感知误差有了明显的下降&当数据量8从"组增加至&组后&感知误差G "明显下降&分别为#`,%)P P *#`*&#P P 以及#`"&"P P %$"进一步对结算结果观察发现&随着参与数据量8的增加&感知误差G =和G "并没有稳定下降&甚至还有所增加%当8从&组增加至%%组时&;/%的初始半径感知误差G =和初始厚度感知误差G "分别从#`#&,P P 和#`,%)P P 增大至#`"*$P P 和#`*%$P P $当8从&组增加至%"组时&;/"的初始半径感知误差从#`#%)P P 增加至#`*#*P P $当8从&组增加至(组时&;/$的初始半径感知误差G =和初始厚度感知误差G "分别从#`%""P P 和#`"&"P P 增大至#`,#*P P 和#`$&,P P %D C B !感知误差分析基于上一节中的结算结果&对感知误差的主要来源进行分析%如图%"所示&其中&2表示通过薄膜压力传感器所测得的肠道环向收缩压力&2D 为通过本构方程&即式!""&计算得到的理论上肠道的环向收缩压力%观察发现)随着测量数据的增多&2逐渐小于2D &最大偏差分别为%`,("9*%`,#"9以及%`"&$9%出现这一偏差的主要原因是)该感知方案为降低运算量&提高感知速度&所采用的本构方程为与时间参量无关的应变能本构方程'$%(&而肠道环向收缩力具有应力松弛效应&即随着被扩张时间的增加&肠道施加在接触装置上的环向收缩压力会随着时间的增加而逐渐减小&最终导致测量值2逐渐小于理论值2D %因此&为保证感知结果的准确性&需要尽可能减短环向收缩压力的测量时间%图%$展示了;/%在测量过程中&环向收缩压力2随测量时间"的变化关系%可以看到&每次转动转轮扩张肠道&肠道环向收缩压力的变化可分为$个阶段)阶段D 表示转动转轮&肠道受到扩张&环向收缩压力增大&这一阶段耗时约为#`)!%`,G %阶段T 和阶段1表示转轮转动至指定位置&压力数据逐渐稳定&可进行数据采集%其中阶段T 中的数据还未稳定&这一阶段耗时约为#`&!!投稿网址 Z Z Z!0G 01S X3B !1H P Copyright ©博看网. All Rights Reserved.。
太原理工 宋建成
太原理工宋建成太原理工大学(太原理工,TYUT)是一所位于中国山西省太原市的综合性大学,是山西省重点支持的高校之一。
学校创建于1902年,历经百余年的发展,已成为一所以工为主,理工优势明显,工学、理学、管理学、文学、经济学、法学、教育学、艺术学等多学科协调发展的综合性大学。
太原理工坚持科学发展观,积极履行社会责任,服务地方经济社会发展,不断提高教学科研水平和人才培养质量,为山西经济社会发展做出了积极贡献。
太原理工大学以提供良好的学习环境和专业教育为宗旨,拥有一支高水平的教学队伍,教师中有国家级教学名师、国家优秀青年基金获得者、千人计划专家、省级名师等。
学校积极参与国家级专业建设和全国高校本科专业教学评估,不断提高教学质量和办学水平。
在学科建设上,太原理工大学拥有一批具有重要影响的一流特色学科,并在相关领域取得了明显的学术成果。
学校还与企业、政府等部门积极合作,促进校企合作,加强学生实践能力和创新能力培养。
太原理工大学积极开展科学研究与技术创新工作,注重学术创新和科研成果的转化。
学校拥有一批国家级、省部级重点科研平台和实验室,包括山西省重点实验室、山西省工程技术研究中心等领域,致力于人才培养和科研工作的融合发展。
学校积极发展科技成果转化和产业合作,取得了一系列具有重大影响的成果,为地方经济发展和社会进步作出了积极贡献。
在人才培养方面,太原理工大学始终把人才培养作为办学的根本任务,积极改革教育教学模式,推进课程教学改革和校园文化建设。
学校拥有一批国家级、省级和校级教学改革项目,注重培养学生的实践能力和创新能力,培养高素质的应用型人才和创新创业人才。
学校还积极推进国际化办学,开展国际合作办学,促进师生之间的学术交流和合作。
太原理工大学作为一所注重社会责任和服务的高校,积极承担社会责任,参与地方经济社会发展。
学校与政府、企业等部门积极合作,推动校地合作,促进校企合作,开展技术服务和成果转化工作,为地方经济社会发展做出了积极贡献。
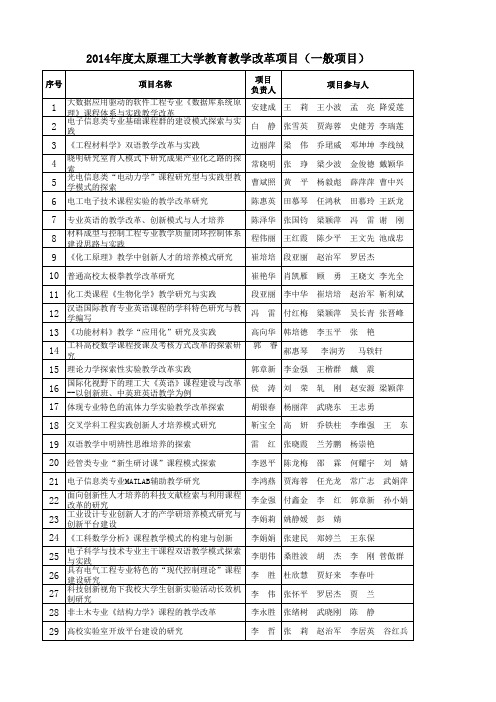
太原理工创新项目
郑婷兰
25 电子科学与技术专业主干课程双语教学模式探索 李朋伟 桑胜波 胡 杰 李 刚 菅傲群
胜 杜欣慧 伟 张怀平 贾好来 罗居杰 武晓刚 赵治军 李春叶 贾 陈 兰 静 谷红兵
28 非土木专业《结构力学》课程的教学改革 29 高校实验室开放平台建设的研究
李永胜 张绪树 李 哲 张 莉
李居英
30 安全工程专业立体化教材建设与梯队式毕业设计 李治刚 王 飞 郭红光
践与探讨 56 中外合作办学项目的实施成效评估调查
王绪柱 武彩萍 薛 温 蕾 孙晓东
娜 郝永花 陈 张 勇
王汉斌
王利舟
55 以实践能力培养为导向的流体力学实验教学的实 武晓东 李金强 张 祺
谢 刚 赵安源 张金萍 王一平 张照昱 阎高伟 张永波 付红梅 韩俊萍 高文超 韩晓霞 许月华 彭宏丽 陈军锋
胡银春 杨丽萍 靳宝全 高 雷 妍
武晓东 乔铁柱 兰芳鹏 邵 霖
王志勇 李维强 杨崇艳 何耀宇 常广志 刘 婧 王 东
红 张晓霞
李恩平 陈龙梅 李鸿燕 贾海蓉
任光龙
武娟萍
22 面向创新性人才培养的科技文献检索与利用课程 李金强 付鑫金 李 红 郭章新 孙小娟
改革的研究 23 工业设计专业创新人才的产学研培养模式研究与 李娟莉 姚静媛 创新平台建设 李娟娟 张建民 24 《工科数学分析》课程教学模式的构建与创新 与实践 26 具有电气工程专业特色的“现代控制理论”课程 李 建设研究 27 科技创新视角下我校大学生创新实验活动长效机 李 制研究 彭 婧 王东保
人才培养教学模式研究 71 理论力学考核及考试方式的改革与实践 张甲雷 张红鸽 段妙珍
70 《嵌入式单片机原理与接口技术》课程系统创新 张军朝 宋建成 马春燕 贾好来 张 灵
学校周年庆典活动策划方案

学校周年庆典活动策划方案目录一、策划背景与目标 (2)1. 活动背景介绍 (2)2. 周年庆典的重要意义 (3)3. 活动目标设定 (3)二、活动内容与安排 (5)1. 主题设定与宣传策略 (5)1.1 活动主题 (6)1.2 宣传口号 (7)1.3 宣传途径与时间安排 (7)2. 庆祝活动流程安排 (8)2.1 开幕式 (9)2.2 校史展览 (11)2.3 文艺演出 (12)2.4 校友交流座谈 (13)2.5 闭幕式与颁奖仪式 (14)三、活动时间与地点安排 (15)1. 活动时间规划 (16)2. 活动地点选择及布置规划 (16)四、嘉宾邀请与接待安排 (17)1. 嘉宾邀请对象及名单确定 (18)2. 邀请函设计与制作 (19)3. 接待服务与流程安排 (20)五、活动预算与经费筹措 (22)1. 活动经费预算表 (23)2. 经费筹措途径与方法探讨 (23)六、活动组织与执行团队构建 (24)1. 活动组织结构与职责划分 (26)2. 执行团队组建与培训安排 (27)一、策划背景与目标随着时光的推移,[学校名称]即将迎来一个重要的里程碑——学校周年庆典。
作为一个集学术传承、文化交流以及成果展示的重要契机,此次周年庆典不仅是对学校历史的回顾与总结,更是对未来发展的规划与展望。
随着教育领域的快速发展和社会各界的高度关注,周年庆典活动的重要性愈发凸显。
以此为契机,推动学校的长远发展和社会影响力进一步提升。
一场富有特色且充满意义的周年庆典活动成为了当下迫切需要精心筹划的重要任务。
传承校园文化,展示学校发展历程与成果,增强学生及校友的荣誉感和归属感。
1. 活动背景介绍随着学校教育事业的不断发展和壮大,我们迎来了学校的周年庆典。
此次庆典不仅是对学校过去一年辛勤付出的总结,更是对未来发展的美好期许。
通过举办周年庆典活动,旨在进一步凝聚师生力量,提升学校形象,展示办学成果,并以此为契机,推动学校各项事业再上新台阶。
山西筑巢引凤为国际学生搭建创业平台

山西筑巢引凤为国际学生搭建创业平台作者:来源:《科学导报》2021年第35期5月25~26日,“太原理工大学国际学生创新创业训练营暨海创论坛——国际学生创业辅导研学会”在中国山西留学人员创业园举行。
活动由太原理工大学国际教育交流学院、中國山西留学人员创业园、山西鑫华博越文化传播有限公司主办,山西智创城NO.1、山西智创城NO.4协办,活动邀请太原理工大学国际教育学院学生、山西智创城NO.1主要企业负责人等100余人参与本次活动。
“海创论坛”是中国山西留学人员创业园推出的特色系列活动之一,是中国山西留学人员创业园打造的服务国际间人才引进、科技交流与合作的论坛活动。
旨在为海外留学归国人员、国际来晋创业人员提供更专业、更有效的服务,积极发挥综改区企业与海外高端专家对接的桥梁和纽带作用。
本次活动主要是为了讲好山西故事,展示在山西创业就业政策、创业孵化服务、工作环境,打造山西“引才、育才、用才环境”,开拓在山西留学的国际学生的创业就业思路,引导国际学生在山西创业、就业,并更好地向全世界宣传山西,实现“集聚英才入三晋、助力英才兴三晋”,促进山西更加开放的国际化发展,为我国“一带一路”发展贡献力量。
活动期间,与会人员先后调研了山西鲲鹏生态创新中心、太原恒研科技有限公司、山西殷氏细胞科技有限公司、百度数据标注基地、山西环球易贸电子商务有限公司、山西全境通国际物流有限公司、山西易通天下产业孵化基地、锦和电商孵化基地等高科技企业。
国际学生非常珍惜这次学习的机会,他们一边听介绍,一边看企业工作间,不时与讲解人员互动交流,释疑解惑,场面进取励志。
期间,中国山西留学人员创业园负责人针对国际学生创业支持政策及鼓励优秀毕业学生在中国创新创业的相关条款进行细致解读。
并邀请太原市高新技术创业服务中心主任、中国火炬创业导师宁慧青主任为国际学生进行创业培训。
培训围绕培养国际学生企业创办能力、市场经营素质等内容,以增强国际学生参与市场竞争和驾驭市场的应变能力。
中北大学携手卓智加快“智慧校园”建设步伐
中北大学携手卓智加快“智慧校园”建设步伐佚名【期刊名称】《中国教育网络》【年(卷),期】2016(000)006【总页数】2页(P62-63)【正文语种】中文当你身处五年前的校园,你是否曾想到能够享受无处不在的无线网络?是否曾想到可以用手机进行书籍借阅和网络支付?是否曾想到可以体验生动形象的网络慕课课程?如今,以物联网为基础的“智慧校园”颠覆了我们对校园学习、工作和生活的想象,我们将体验到连续的、无处不在的网络。
而有线、无线融合一体的网络环境是“智慧校园”必备的一个基础设施平台,也成为了现阶段衡量高校信息化、现代化建设的重要指标。
山西中北大学与卓智网络科技有限公司展开战略合作,共同建设智慧校园典范,取得了信息化建设的重大进展。
中北大学位于山西省太原市,并在朔州市设有校区,是一所由山西省人民政府与国家国防科技工业局共建、山西省人民政府管理的多科性教学研究型大学。
学校总占地2501亩,建筑面积近101万平方米。
现有全日制在校生3万余人。
2015年,经过与全校师生的讨论和投票表决,中北大学正式携手卓智,开展校园网络建设的战略合作,对校园基础网络进行了全面升级改造,累计部署了AP数近9000台,成为了山西第一所Wi-Fi全覆盖的高校。
全校核心骨干网升级到40G,汇聚区域万兆互联,千兆到桌面的先进网络基础架构。
新建成的校园网开户数量达到约2.5万人,高峰在线人数近2万人。
给全校师生带来了高品质的网络体验。
全校Wi-Fi全覆盖办公区、宿舍区、教学区、实训区、食堂、图书馆等区域,根据不同的区域采用定制化的产品以及解决方案,保证了Wi-Fi信号的质量。
无处不在的Wi-Fi,为中北大学未来MOOC系统、在线考试系统、监考系统等下一阶段“智慧校园”的建设项目创造了良好的网络环境。
在校园网管理与维护方面,中北大学拥有校园网的管理权,借助卓智的管理平台,将学校无线网络以及原有办公网络和新建的学生宿舍有线网统一认证管理,整合运营,打通了信息孤岛,增强校园网络的安全性和可控性。
太原促进转型创新高价值专利培育大赛启动
太原促进转型创新高价值专利培育大赛启动作者:操秀英
来源:《科学导报》2022年第30期
科学导报讯近日,“并州杯”太原促进转型创新高价值专利培育大赛在太原启动。
大赛以“聚焦高价值专利、助力产业转型升级”为主题,面向全省征集科技创新型项目,旨在营造知识产权运营体系建设氛围,激发知识产权创新。
据介绍,本次大赛赛程分为项目征集、初赛、决赛三个阶段,初赛将以专家评审的方式择优推荐16个项目入围决赛,决赛以参赛团队现场路演、专家现场评议、评委现场打分的形式决出1项一等奖、2项二等奖、3项三等奖和6项优胜奖。
大赛所有参赛项目应当具有至少一项发明或实用新型有效专利,且参赛项目所提供的專利能够有效保护参赛项目的创新成果。
山西省内注册的企业、高校、科研机构符合条件的项目均可报名参赛。
参赛项目由专利申请人(专利权人)所在单位报名参加,也可与相关机构、个人联合组队参赛。
报名截止日期为7月30日。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中软卓越助力太原理工大学“中软杯”科技文化节
近日,太原理工大学计算机科学与技术学院、软件学院共同举办的“中软杯”第七届科技文化节正式拉开帷幕。
校招就处处长袁群芳、校学生处副处长高航、校团委书记杜华云以及软件学院党政领导梁宪生、陈俊杰、池卫平、崔会文等领导,中软卓越北京ETC大区经理杨菲、区域经理罗正出席了开幕式。
据悉,本次科技文化节的宗旨是贯彻落实软件学院“生涯导航”实施纲要,丰富校园科技文化生活,展示新时代大学生创新风采和精神风貌,培养学生参与科技实践及创新的意识和能力,推进校园文化建设的进程,构建和谐校园。
作为此次科技文化节的重要合作伙伴,杨菲在致辞中指出,科技文化节为大学生提供了充分展现自我的平台,有利于提高大学生的科技文化素养,激发创新思维,在实践中强化自身能力。
中软卓越作为中软国际的人才培养中心,愿尽自身所能为太原理工大学的学生创新实践提供条件。
得益于双方在提升大学生创新能力上的高度共识,中软卓越于4月8日启动,旨在激发大学生创新意识的首届“中软卓越”安卓软件创意大赛也被列为此次科技文化节的重要实践项目,受到了校领导的高度重视。
值得一提的是,“中软卓越杯”安卓软件创意大赛校园宣讲系列活动的第一站,就选在了太原理工大学,其重要性可见一斑。
据了解,中软国际与太原理工大学多年来始终保持着密切的合作关系。
为进一步整合优势教育资源,深化高校教育改革,提高学生创新能力和实践能力,打造工程应用型人才,双方更是共同设立了“软件与服务外包学院”,将中软国际先进的实践经验融入到大学生培养过程中,建立起理论联系实际的人才联合培养机制。
与此同时,中软国际近期还在太原理工大学设立了“中软国际奖学金”,以鼓励学生积极进取、勇于创新。
此外,在科技文化节开幕仪式上,太原理工大学还举行了“太原理工大学大学生软件创业基地”揭牌仪式。
软件创业基地将为有创意、有激情、有毅力的大学生提供创业支持和技术指导。
无独有偶,“中软卓越杯”安卓软件应用创意大赛决赛阶段,中软卓越也将邀请中软国际相关业务线、风投机构、企业合作伙伴等参与作品评选,为优秀团队提供就业机会和创业机会。