智能网联汽车测试评价关键技术
智能网联汽车技术发展现状及关键技术
智能网联汽车技术发展现状及关键技术摘要∶随着社会的进步与发展,我国的科学技术在快速发展。
各种新技术应用在汽车领域。
电动化与智能化成为未来发展的重点,为人们提供更多的便利成为了现代汽车发展的方向,而这一切都要建立在现代技术之上。
本文从智能网联汽车技术的发展现状及关键技术出发,旨在结合当下我国技术来展望未来汽车的发展。
关键词:智能网联汽车;发展现状;关键技术1引言现代汽车具备的功能越来越多,如前向碰撞预警系统、车道偏离预警系统、驾驶员疲劳预警系统、车道保持辅助系统以及智能决策等技术成为了现代汽车迈向未来的发展基础。
智能网联汽车是指基于通信互联建立车与车之间的连接,车与网络中心和智能交通系统等服务中心之间的连接的一种汽车,智能网联汽车实现了车内网络与车外网络之间、人-车-路-环境之间的信息交互。
在现代技术的辅助下,智能网联汽车的发展更能满足当下的需求和生活方式。
2智能网联汽车研究现状美国是智能网联汽车应用的先行者,以交通运输部为代表的政府机构长期致力于推动发展汽车和交通行业。
2013年,NHTSA发布了《关于自动驾驶车辆政策的初步声明》政策,这是第一个关于自动驾驶汽车的政策,该政策明确了NHTSA在自动驾驶领域支持的研究方向,主要包含人为因素的研究、系统性能需求开发、电控系统安全性三个方面。
2014年,美国交通运输部与ITS联合项目办公室共同提出(ITS战略计划2015-2019),提出了美国ITS未来五年的发展目标和方向。
美国ITS联合项目办公室当前正在推进的项目中,大多与网联化技术相关,主要有网联汽车的安全性应用研究、移动性应用研究、政策研究、网联汽车技术研究、网联汽车示范应用工程等多个维度。
日本在2017年的ITS构想及线路图中,明确了自动驾驶技术的推广计划:2020年左右实现高速公路上的L3自动驾驶、L2自动驾驶和特定区域的L4自动驾驶。
到2025年,将实现高速公路上的L4自动驾驶。
2018年3月,日本政府在“未来投资会议”上提出了《自动驾驶相关制度整备大纲》,明确了L3级汽车驾驶事故责任的定义。
2023-智能网联汽车产品测试评价白皮书-1

智能网联汽车产品测试评价白皮书随着智能互联技术的不断进步,智能网联汽车成为了未来汽车行业的一大趋势。
然而,新技术的应用也给汽车行业带来了新的风险和挑战,如何保障智能网联汽车的安全性和可靠性便成为了一个亟待解决的问题。
针对这一问题,中国汽车技术研究中心和中国电子信息产业发展研究院已经联合发布了《智能网联汽车产品测试评价白皮书》,这份白皮书提供了一系列测试评价方案,从而更好地保证智能网联汽车的质量。
第一步:测试评价流程白皮书中确定了智能网联汽车产品测试评价的流程,包括产品类型确认、测试策略制定、产品测试实施、测试数据分析与处理、测试结果评价。
通过以上流程,可以全面系统地对智能网联汽车产品进行测试,从而保证它的性能、安全性和可靠性。
第二步:测试项目在测试实施阶段,白皮书确定了智能网联汽车测试所需的各项测试项目,主要包括通信性能测试、驾驶辅助性能测试、安全性能和可靠性测试等。
这些测试项目可以评估智能网联汽车的各项性能指标,为用户提供更好的驾驶体验。
第三步:测试评价指标为了更准确地评价智能网联汽车的各项性能指标,白皮书特别列出了测试评价指标,包括通信性能、车辆控制性能、驾驶辅助性能、安全性能和可靠性等多个方面。
这些指标可以帮助测试人员更全面地评估智能网联汽车产品的质量。
第四步:测试评价标准最后,在对智能网联汽车进行测试评价的过程中,白皮书中也对测试评价标准进行了详细规定。
这些标准主要是从汽车技术、质量和用户需求等多个方面出发,为智能网联汽车的制造商、测试机构和用户提供了统一的测试评价标准,从而保证了智能网联汽车产品的一致性和可比性。
总之,《智能网联汽车产品测试评价白皮书》提供了一套完整的测试评价方案,为保障智能网联汽车的安全性和可靠性提供了有力保障。
相信在未来的智能网联汽车领域,这份白皮书将会发挥越来越重要的作用,推动智能网联汽车行业的健康发展。
第八章 智能网联汽车测试与评价技术 电子课件
2.1相似第一定理
相互相似的物理现象必须遵循相同的客观规律。如果定律可以用方程来表示,那么物
理方程必须是相同的。如果这两种流动现象在机械上相似,那么空间中相应的点和相应的
瞬时物理量彼此成一定比例。这些相似参数的选择不能是任意的,而是符合一定的规律并
相互制约。此外,物理现象中的相似性准则在不同的时间和不同的空间位置具有不同的值,
评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,可以全
可以全面系统的评价智能汽车的性能,为研发与生产提供方向。
面系统的评价智能汽车的性能,为研发与生产提供方向。
测评的分类
在进行测试和评价时,需要研究测评目的。可以根据测评对象对汽车的测评目的进行分
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
和合理的实验方法进行信号分析和数据处理。
行信号分析和数据处理。评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,
场对汽车性能和功能的要求,满足大众汽车对汽车的多样化需求,研发阶段的测试和评估
范围非常广泛。为了适应新技术,特别是当前的汽车智能化和自动化,测试和评估方法需
要不断更新。
8.1.2 通用测试原理
1.测试方案设计方法
常见的试验方案设计方法包括单因素试验方案设计、双因素试验方案设计、疲劳试验
方案设计和寿命试验方案设计等。
验证,提早发现算法中问题和错误,在开发的过程中不断验证。
智能网联汽车测试与评价技术
目录分析
从整体上看,这本书的目录结构清晰,层次分明。作者根据智能网联汽车测 试与评价技术的特点,将其分为理论和实践两个部分。理论部分主要介绍了智能 网联汽车的基本概念、技术原理以及测试评价的基本方法,为读者提供了扎实的 基础知识。实践部分则重点介绍了智能网联汽车的测试场景、测试工具以及实际 应用案例,使读者能够更加深入地了解这一技术的实际应用。
精彩摘录
“在智能网联汽车的研发过程中,我们不仅要技术的先进性,更要注重其实 用性和可靠性。只有将先进的技术与实际应用相结合,才能真正推动智能网联汽 车的可持续发展。”
精彩摘录
“随着智能网联汽车的普及,与之相关的法规和政策也需与时俱进。政府和 企业应共同合作,建立起完善的法规体系,为智能网联汽车的健康发展提供有力 保障。”
目录分析
在理论部分,作者详细介绍了智能网联汽车的定义、发展历程以及关键技术。 通过这一章节,读者可以全面了解智能网联汽车的基本概念和技术背景。作者还 对智能网联汽车的测试评价方法进行了深入探讨,包括性能测试、功能测试、安 全测试等方面。这一章节为后续的测试实践提供了重要的理论支持。
目录分析
进入实践部分,读者将了解到智能网联汽车的测试场景和测试工具。作者根 据实际应用需求,将测试场景分为城市道路、高速公路、停车场等多个方面,并 针对每个场景的特点进行了详细的测试方法介绍。作者还介绍了多种先进的测试 工具和技术,如传感器、通信设备、仿真软件等,为读者提供了全面的测试手段。
智能网联汽车Biblioteka 试与评价技术读书笔记01 思维导图
03 精彩摘录 05 目录分析
目录
02 内容摘要 04 阅读感受 06 作者简介
思维导图
本书关键字分析思维导图
评价
专利视域的智能网联汽车分析与研究——以江苏省智能网联汽车测试与评价为例

第21期2023年7月江苏科技信息Jiangsu Science and Technology InformationNo.21July,2023基金项目:江苏省知识产权局软科学研究计划项目;项目名称:智能网联汽车产业链专利分析及发展战略研究;项目编号:JSIP -2022-R -C01㊂ 江苏省大学生创新创业训练计划 项目;项目名称:自动辅助驾驶系统功能测试与评价方法研究;项目编号:202313654022Y ㊂作者简介:谢继鹏(1984 ),男,江苏溧阳人,副教授,博士;研究方向:智能车辆工程技术与教学研究及专利分析㊂专利视域的智能网联汽车分析与研究以江苏省智能网联汽车测试与评价为例谢继鹏1,方㊀煜1,华国栋2(1.南京理工大学紫金学院,江苏南京210023;2.江苏智行未来汽车研究院,江苏南京211111)摘要:文章基于专利视角,以江苏省智能网联汽车测试与评价产业链为研究对象,对该领域的技术发展现状进行了分析和研究㊂首先,在数据来源和分析方法方面,通过收集专利数据㊁运用专利分析工具等手段进行分析;其次,在专利分析部分,分别从专利申请趋势㊁区域分布㊁申请主体㊁关键领域和技术流向等角度进行深入研究;最后,得出江苏省智能网联汽车测试与评价领域仍将保持良好的发展趋势,南京地区在该领域专利数量领先于其他地市,学术和研究机构是该领域专利申请人的主要来源,江苏省民企和高新技术企业具有很强的创新能力等结论,并提出了相应的政策建议㊂这些研究结论可以为相关企业和研究机构提供参考,有助于优化江苏省在智能网联汽车领域的专利布局,提升江苏省智能网联汽车产业的竞争力㊂关键词:智能网联汽车;专利分析;测试与评价;申请主体;关键技术中图分类号:U467;G306㊀㊀文献标志码:A 0㊀引言㊀㊀智能网联汽车(Intelligent Connected Vehicle,ICV)是指搭载先进的车载传感器㊁控制器㊁执行器等装置,并融合现代通信与网络技术,实现车与X(车㊁路㊁人㊁云端等)智能信息交换㊁共享,具备复杂环境感知㊁智能决策㊁协同控制等功能,可实现安全㊁高效㊁舒适㊁节能行驶,最终可替代人工驾驶操作的新一代汽车[1]㊂智能网联汽车已成为中国及欧美日等国家和地区的战略性产业之一,是‘中国制造2025“的重点支持产业[2]㊂为保证自动驾驶车辆在道路上的稳定性㊁安全性和可靠性,测试与评价体系的建设显得至关重要㊂2018 2022年,中国相继发布了‘智能网联汽车道路测试与示范应用管理规范“等政策文件,对智能网联汽车道路测试的管理要求和程序进行了规范㊂在测试和评价环节开展技术分析与研究,可以进一步优化测试和评价资源的有效配置,加快实现智能网联汽车领域关键核心技术的突破,推动我国智能网联汽车产业的高质量发展㊂1㊀研究背景㊀㊀对智能网联汽车开展全方位的测试评价是智能网联汽车安全上路与产业落地的重要保障㊂智能网联汽车测试技术包括自动驾驶功能测试㊁虚拟仿真测试㊁网联测试㊁大规模并发测试和互联互通测试等㊂其中,自动驾驶功能测试是依托自动驾驶测试管理平台实现对自动驾驶车辆行为的实时监测,完成车辆测试数据分析和结果输出;虚拟仿真测试通过计算机模拟各种测试场景;网联测试是根据车用通信标准中的接口协议在实际道路场景中开展车路协同功能的测试;大规模并发测试是通过部署大量车载和路侧终端,依托高性能计算平台和网络通信技术,模拟现实场景下的交通流,对车辆网联系统进行评估和验证㊂除了智能网联汽车测试,还需要对智能网联汽车的人机交互和可靠性进行评价,具体内容包括用户体验评价㊁可靠性评价㊁安全性评价等㊂其中,用户体验评价是指用户使用智能网联汽车,对便利性㊁舒适性感受等多方面的评价;可靠性评价是指对智能网联汽车系统在各种工作条件下可靠性的评价;安全性评价是指对智能网联汽车的操作安全性㊁道路安全性等多方面进行评价㊂国内学者对智能网联汽车在封闭式测试场㊁公开道路测试㊁智能车子系统测试场景等进行研究,并建立相应的评价体系和评价方法[3-5],不断完善和提高测试评价技术,以确保智能网联汽车的安全性和可靠性㊂专利分析是一种有效的研究方法,可以通过对相关专利文献的系统分析,揭示技术领域的关键技术点㊁技术方向以及创新动态㊂如王健美等[6]和董文波[7]从全球ICV专利的角度,对技术研发趋势㊁竞争区域㊁主体和价值等方面进行了计量分析;戚湧等[8]基于专利数据识别智能网联汽车产业关键核心技术主题,通过LDA模型识别出8个关键技术㊂从智能网联汽车关键核心技术专利分析角度来看,张莹等[9]对车联网信息安全技术㊁王军雷等[10]对智能网联汽车决策技术等的发展趋势㊁重要申请人㊁各技术分支分布情况进行了分析㊂基于专利分析的智能网联汽车测试与评价技术研究,可以全面了解该领域的技术创新和专利布局情况,识别技术热点和趋势,从而为技术研发㊁标准制定和政策支持提供重要参考㊂2㊀数据来源与分析方法2.1㊀数据来源㊀㊀本文采用智慧芽专利分析系统,检索智能网联汽车测试与评价技术下级分支技术,主要包括测试装备㊁仿真㊁评价方法㊁试验方法等技术的专利㊂检索采用关键词和主要字段相结合的方式,采用MAINF:() AND TAC:()的检索式,其中,关键词涵盖自动驾驶㊁智能网联㊁测试装备㊁试验方法㊁并发测试㊁V2X测试㊁评价方法等㊂为确保准确性,剔除了无关关键词(如轨道车㊁无人机领域)㊂由于本文重点研究江苏省区域,因此在检索式中加入了搜索字段AN_ PROVINCE:(江苏)对检索区域进行限制;而检索时间限定在2012年1月1日 2022年12月31日,共检索出4593条江苏省智能网联汽车测试与评价领域的专利㊂2.2㊀分析方法㊀㊀在梳理智能网联汽车测试与评价的概念和基本现状的基础上,采用数理统计分析㊁数据关联分析㊁聚类分析㊁词云分析等方法,提取和统计专利申请量㊁专利申请人㊁区域分布㊁重要领域分析和技术流向分析5个方面分析对象目前所处的发展趋势,为江苏省制定相关的产业政策提供参考㊂3㊀智能网联汽车测试与评价技术专利分析3.1㊀专利申请趋势㊀㊀江苏省在智能网联汽车测试与评价关键技术领域的专利申请趋势与全国发展趋势相似,如图1所示㊂2000 2011年,该领域专利申请量几乎为零,仍处于探索阶段;2012 2015年,进入缓慢发展阶段,每年有少量专利进行申请,并逐年增加;2016 2022年,江苏省的专利申请数量显著加速增长,从115项增加到1140项,增长速度明显加快,尤其是2017 2019年申请数量大幅增长㊂根据专利申请数量的增长趋势,可以预见江苏省在智能网联汽车测试与评价关键技术领域的研究和开发活动将持续增加㊂图1㊀江苏省及全国专利申请趋势3.2㊀申请区域分析㊀㊀北京㊁广东和江苏是全国智能网联汽车测试与评价关键技术领域的主要专利申请地区,专利申请数量分别为9206项㊁7696项和4593项,3个地区的专利申请数量占比超过52%(见图2)㊂尤其是江苏省,在该领域专利申请量超过了传统汽车研发大省上海市,表明江苏省在智能网联汽车领域的研发实力正在不断提升㊂尽管江苏省在该领域专利申请数量远高于全国平均水平,但仍落后于北京㊁广东,只占全国总量的11%左右㊂南京和苏州是江苏省在智能网联汽车测试与评价关键技术领域的主要创新中心,两地的专利申请数量占总数的70.7%(见图3)㊂此外,无锡㊁镇江和常州等地也在该领域有较多的专利申请,表明江苏省多个地市在这一领域非常活跃,与国家和江苏省智能网联汽车产业政策在各地市布局基本一致㊂值得注意的是,无锡市是国家级车联网先导区之一,通过近几年的建设,无锡已成为全国首个全域测试㊁示范城市,但无锡在该领域的专利申请数量相对较低,仅占江苏省总数的7.05%㊂图2㊀全国各省市申请数量与排名情况图3㊀江苏省各地市专利申请数量与排名情况3.3㊀专利申请主体分析㊀㊀根据智慧芽检索出的数据,江苏省在智能网联汽车测试与评价关键技术领域中,企业和院校/研究机构是专利申请数量最多的类型,分别有2417和2099项㊂由表1筛选出Top50的企业和高校/研究机构等专利竞争主体分析可看出, 双一流 高校有1449项专利,远超其他专利申请人,占比44.2%;企业次之,其中民企或高新技术企业表现突出㊂表1㊀江苏省内企业、高校和研究机构专利申请数量对比类别企业属性高校国企民企高新技术 双一流 非 双一流研究机构Top10专利数量/项9018918911702090Top30专利数量/项1824334361420253144Top50专利数量/项1825995691449314165比例/%5.618.317.444.29.65.0智能网联汽车领域的发展势头迅猛,各大院校和研究所也积极参与其中,且在该领域中的表现备受关注㊂东南大学㊁南京航空航天大学㊁江苏大学㊁南京理工大学㊁南京邮电大学是江苏省汽车测试与评价领域具有重要影响力的院校/研究机构类申请人,占该类型申请人的76.8%,大部分是 双一流 院校或该领域优势学科院校(见图4)㊂同时值得注意的是南京航空航天大学的失效专利比例稍偏高,达到18.5%,该校可能在专利保护方面存在一定的问题或挑战,例如专利的可靠性和有效性不够高㊁专利维护欠缺等问题,可能需要进一步加强该领域的专利保护㊁布局㊁维护和转让等工作㊂结合地市申请数量,南京地区在该领域的专利数量领先于其他地市,主要归因于南京拥有相对较多的高层次高校/科研机构和高新技术型企业;相比之下,苏州以高新技术型企业为主导力量,而镇江则以高校为主导力量㊂江苏省智能网联汽车测试与评价领域的企业申请人持有的专利数量不像高校/科研机构那样集中在几家单位中,而是广泛分散在诸多企业中;其中,领域专利数量超过50件以上的企业是的卢技术㊁苏州智加㊁中汽创智㊁苏州浪潮㊁苏州挚途5家企业(见图5),他们申请的专利数量占企业类型的16.7%,也说明这些企业在智能网联汽车测试与评价关键技术领域中具有重要影响力㊂从专利状态来看,苏州智加是申请专利最多的企业,共有80项有效专利权,占85.1%,其专利法律状态相对较稳定㊂的卢技术共有95件专利,其中在审专利占50.5%;同时中汽创智共有94件专利,在审专利占81.9%,在审专利的数量反映企业的创新能力和研发实力,如专利获得授权,将有助于进一步提高企业未来的核心竞争力和巩固其市场地位㊂初速度(苏州)授权专利占总专利76.9%,在审专利数量仅有1件,说明专利目前稳定性较高,但在该领域专利布局不足,后期可能会影响到该公司的专利战略和竞争优势㊂图4㊀江苏省主要高校专利申请人及专利状态图5㊀江苏省主要企业专利申请人及专利状态㊀㊀江苏省汽车测试与评价领域的企业竞争力较强,但由表2可见,与国内该领域的头部企业以及外企在国内专利布局相比还有较大的差距,江苏省企业在科研投入和专利布局上还要进一步加强㊂表2㊀国内外及江苏省重要企业专利申请人对比分析排名国内国外江苏省名称数量/人名称数量/人名称数量/人1华为2289本田839的卢技术952腾讯2014辉达410苏州智加943百度网讯579英特尔313中汽创智944重庆长安443丰田305苏州挚途555百度在线375高通287苏州浪潮733.4㊀重要领域分析㊀㊀从图6的技术主题分类关键词云图可见,江苏省智能网联汽车测试与评价主要围绕自动驾驶测试方面展开,其中涉及的关键技术有5大类:(1)数据处理与分析类,包括数据集㊁成像数据㊁数据传输㊁数据采集㊁目标检测㊁特征提取等;(2)控制算法与系统类,包括网络模型㊁深度学习㊁卷积神经网络㊁强化学习算法㊁自适应控制㊁车辆控制㊁转向控制㊁转向系统㊁控制单元等;(3)传感器与设备类,包括雷达(激光雷达㊁波雷达㊁毫米波)㊁视觉㊁电子设备㊁基站等;(4)安全性类,包括行车安全㊁障碍避免㊁路径追踪㊁驾驶员监控等;(5)模拟仿真类,包括模拟测试㊁测试场景㊁仿真测试㊁模式模拟等㊂图6㊀技术主题分类关键词云图根据图7所示的IPC分类号和专利申请数量可以总结出,江苏省智能网联汽车测试与评价的关键技术主要集中在以下几方面㊂3.4.1㊀基于生物学模型的计算机系统(G06N3)㊀㊀该类技术主要用于研究人工智能与生物系统的结合,如神经网络等技术,以实现更加智能化的自动驾驶和交通管理㊂3.4.2㊀图像或视频识别或分析(G06K9,G06V10, G06T7)㊀㊀包括图像增强㊁复原㊁场景元素识别㊁特征提取㊁目标分类㊁图像匹配和识别等㊂这些技术可用于智能网联汽车的环境感知㊁目标识别和行为预测㊂3.4.3㊀自动驾驶控制(G05D1,B60W30,B60W50, B60W40,B60W60)㊀㊀该类技术主要涉及自动驾驶仪㊁驾驶控制系统㊁位置㊁航道㊁高度或姿态的控制等㊂通过使用传感器数据㊁地图信息和控制算法等技术,实现车辆的自动驾驶和驾驶参数判断与计算㊂3.4.4㊀车联网V2X及测试场景(G08G1,G01M17, G06V20)㊀㊀该类技术主要用于在各种与道路和车辆交通控制相关复杂场景下对车辆网系统进行测试与验证,这些技术可以提高道路交通的安全性和效率以及车联网的智能化㊂3.4.5㊀传感器数据处理(G06F17,G01S17,G01C21)㊀㊀该技术主要涉及传感器数据的采集㊁处理和分析,包括雷达㊁摄像头㊁激光雷达㊁惯性测量单元等多种类型的传感器㊂通过使用这些传感器的数据,可以实现车辆的精确定位㊁环境感知和障碍物检测等功能㊂3.4.6㊀车辆通信(H04W4,G01S19)㊀㊀该类技术主要涉及车辆间通信和与基础设施的通信,以实现车辆之间的协同㊁实时信息交换和数据共享等功能㊂这些技术可用于交通流优化和交通安全等方面㊂图7㊀主要IPC分类号及专利数量统计3.5㊀技术流向㊀㊀江苏省的汽车测试与评价专利技术合作主要涉及东南大学㊁江苏大学㊁南京航空航天大学㊁南京理工大学等高校,以及中汽创智和苏州智加等企业㊂江苏的高校内部合作与技术交流较多,此外,相关技术也被吉林大学㊁清华大学以及百度在线网络技术(北京)有限公司等频繁引用,体现这些机构/企业在汽车测试与评价领域展示了较强的研发实力和技术创新能力(见图8)㊂图8㊀江苏省测试与评价专利技术流向4㊀结语㊀㊀江苏省智能网联汽车测试与评价领域目前处于上升期,随着自动驾驶技术由车辆智能化向网联化进一步发展,江苏省在该领域仍将保持良好的发展趋势㊂从地域分布上来看,南京地区在该领域的专利数量领先于其他地市,主要归因于南京拥有相对较多的高层次高校/科研机构和高新技术型企业;相比之下,苏州以企业为主导力量,而镇江则以高校为主导力量;虽然无锡是智能网联汽车的先导区,但其相关企业的专利布局与维护还有待进一步加强㊂在该领域内的传统学术和研究机构仍然是这些领域专利申请人的主要来源,还持续保持着在该领域的竞争优势,同时,江苏智能网联产业的高新技术型企业也表现出了较强的技术创新能力;但不管是江苏省的高校还是企业,与国内头部高校和企业相比,在专利申请量上仍存在较大差距㊂从专利政策层面考虑,可以设置产业联盟㊁专利联盟等组织,协助企业进行专利布局㊁维护和优先申请审查等环节工作以巩固其专利稳定性和持续性,设置关键技术地方标准委员会编制江苏省地方标准和团体标准,进一步推动建设智能网联汽车产业强省㊂参考文献[1]中国汽车工程学会.节能与新能源汽车技术路线图2.0[M].2版.北京:机械工业出版社,2021. [2]李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报, 2017(1):1-14.[3]曾立锵,连鑫,王旭,等.智能网联汽车公开道路测试评价方法[J].机器人产业,2022(6):87-98. [4]宗晨宏,马健霄,陆涛.封闭式智能网联汽车测试场可靠性评价方法[J].重庆理工大学学报(自然科学),2023(4):105-114.[5]林国庆,逯超,韩龙飞,等.汽车自动紧急制动系统行人测试与评价方法[J].汽车安全与节能学报, 2020(3):296-304.[6]王健美,魏晨,胥彦玲,等.专利视角下全球智能网联汽车技术竞争态势分析[J].汽车技术,2021 (8):20-29.[7]董文波.专利视域下全球智能网联汽车技术发展动态与竞争态势研究[J].中国发明与专利,2023 (3):28-37.[8]戚湧,陈墨.专利视角下智能网联汽车关键核心技术主题识别研究[J].中国发明与专利,2022(11): 5-11.[9]张莹,李华,郭利娜.车联网信息安全专利技术综述[J].网络安全技术与应用,2022(2):123-124. [10]王军雷,吕惠,王亮亮,等.基于专利分析的智能网联汽车决策技术发展现状分析[J].汽车技术,2019 (12):12-17.(编辑㊀何琳)Analysis and research of intelligent connected vehicle in patent horizon taking the test and evaluation of ICV in Jiangsu province as an exampleXie Jipeng1Fang Yu1Hua Guodong21.Nanjing University of Science and Technology Zijin College Nanjing210023 China2.Jiangsu ZhixingFuture Automobile Research Institute Co. Ltd. Nanjing211111 ChinaAbstract This article analyzes and studies the technological development of intelligent connected vehicle testing and evaluation in Jiangsu province from a patent perspective.Firstly by collecting patent data and using patent analysis tools the article conducts an analysis on data sources and analysis methods.Secondly in the patent analysis part the article explores the trends in patent applications application areas competitors important fields and technology trends.Finally the article concludes that the field of intelligent connected vehicle testing and evaluation in Jiangsu province will continue to maintain a good development trend Nanjing has the highest number of patents in this field compared to other cities traditional academic and research institutions are the main applicants for patents in this field and the private enterprises or high-tech enterprises in Jiangsu province have strong innovation capabilities.Some corresponding policy suggestions are also proposed.These research results not only provide reference for relevant enterprises and research institutions but also help optimize the patent layout of Jiangsu province in the field of intelligent connected vehicles and enhance its competitiveness.Key words intelligent connected vehicle patent analysis testing and evaluation application subject key technology。
智能网联汽车(V2X)测试的实践与思考
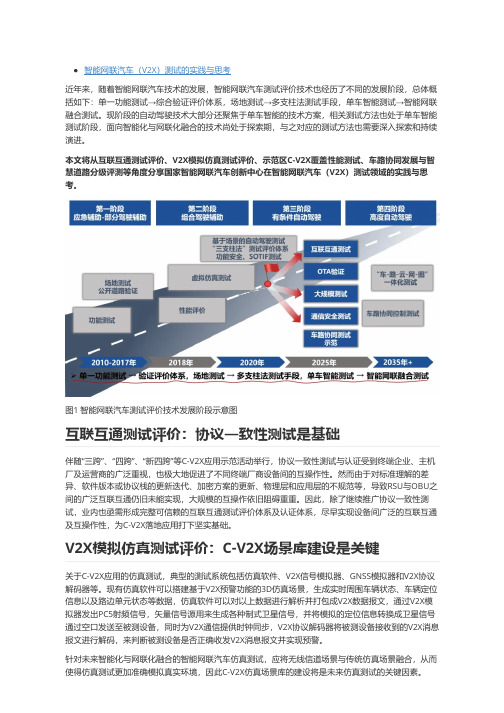
智能网联汽车(V2X)测试的实践与思考近年来,随着智能网联汽车技术的发展,智能网联汽车测试评价技术也经历了不同的发展阶段,总体概括如下:单一功能测试→综合验证评价体系,场地测试→多支柱法测试手段,单车智能测试→智能网联融合测试。
现阶段的自动驾驶技术大部分还聚焦于单车智能的技术方案,相关测试方法也处于单车智能测试阶段,面向智能化与网联化融合的技术尚处于探索期,与之对应的测试方法也需要深入探索和持续演进。
本文将从互联互通测试评价、V2X模拟仿真测试评价、示范区C-V2X覆盖性能测试、车路协同发展与智慧道路分级评测等角度分享国家智能网联汽车创新中心在智能网联汽车(V2X)测试领域的实践与思考。
图1 智能网联汽车测试评价技术发展阶段示意图互联互通测试评价:协议一致性测试是基础伴随“三跨”、“四跨”、“新四跨”等C-V2X应用示范活动举行,协议一致性测试与认证受到终端企业、主机厂及运营商的广泛重视,也极大地促进了不同终端厂商设备间的互操作性。
然而由于对标准理解的差异、软件版本或协议栈的更新迭代、加密方案的更新、物理层和应用层的不规范等,导致RSU与OBU之间的广泛互联互通仍旧未能实现,大规模的互操作依旧阻碍重重。
因此,除了继续推广协议一致性测试,业内也亟需形成完整可信赖的互联互通测试评价体系及认证体系,尽早实现设备间广泛的互联互通及互操作性,为C-V2X落地应用打下坚实基础。
V2X模拟仿真测试评价:C-V2X场景库建设是关键关于C-V2X应用的仿真测试,典型的测试系统包括仿真软件、V2X信号模拟器、GNSS模拟器和V2X协议解码器等。
现有仿真软件可以搭建基于V2X预警功能的3D仿真场景,生成实时周围车辆状态、车辆定位信息以及路边单元状态等数据,仿真软件可以对以上数据进行解析并打包成V2X数据报文,通过V2X模拟器发出PC5射频信号,矢量信号源用来生成各种制式卫星信号,并将模拟的定位信息转换成卫星信号通过空口发送至被测设备,同时为V2X通信提供时钟同步,V2X协议解码器将被测设备接收到的V2X消息报文进行解码,来判断被测设备是否正确收发V2X消息报文并实现预警。
《2024年基于场景的智能网联汽车“三支柱”安全测试评估方法研究》范文

《基于场景的智能网联汽车“三支柱”安全测试评估方法研究》篇一一、引言随着智能网联汽车的快速发展,其安全性能的测试评估显得尤为重要。
本文提出了一种基于场景的智能网联汽车“三支柱”安全测试评估方法,该方法主要针对智能网联汽车的驾驶环境、车辆性能及信息交互等关键因素进行深入研究。
通过对实际驾驶场景的模拟与评估,以提高智能网联汽车的安全性,并为其测试评估提供科学的依据。
二、智能网联汽车概述智能网联汽车是指集成了先进的传感器、控制器和通信技术,能够与周围环境进行实时交互,实现车辆与车辆、车辆与基础设施、车辆与行人之间的信息共享和协同驾驶的汽车。
其发展对于提高道路交通安全、减少交通事故具有重要意义。
然而,随着其普及程度的提高,对安全性能的测试评估也提出了更高的要求。
三、基于场景的“三支柱”安全测试评估方法(一)第一支柱:驾驶环境场景测试驾驶环境场景测试主要针对智能网联汽车在各种道路环境下的表现进行评估。
通过对不同道路类型、交通状况、天气条件等场景的模拟,测试车辆在各种环境下的感知、决策和执行能力。
同时,还需考虑道路标志、交通信号等信息的识别和处理能力,以评估车辆在复杂环境下的安全性能。
(二)第二支柱:车辆性能测试车辆性能测试主要针对智能网联汽车的硬件系统和软件系统进行评估。
硬件系统包括传感器、执行器等部件的性能和可靠性;软件系统则包括控制策略、算法等。
通过在不同场景下的实际测试,评估车辆在各种情况下的动力性、稳定性、制动性能等关键指标,以确保车辆在各种条件下的安全性能。
(三)第三支柱:信息交互安全测试信息交互安全测试主要针对智能网联汽车在与其他车辆、基础设施和行人进行信息交互时的安全性进行评估。
通过模拟各种信息交互场景,测试车辆在接收和处理其他交通参与者信息时的准确性和及时性,以及在信息交互过程中的抗干扰能力和故障处理能力。
此外,还需考虑信息安全和隐私保护等方面的问题,以确保信息交互的安全性。
四、测试评估流程与方法(一)确定测试场景和目标根据智能网联汽车的特性和需求,确定需要测试的场景和目标。
浅析智能网联汽车关键技术及其趋势
浅析智能网联汽车关键技术及其趋势摘要:简述智能网联汽车概念,分析了目前的关键技术,包括环境感知、智能决策、控制执行、通信与平台、信息安全,并阐述了其发展趋势。
关键词:智能网联;深度学习;V2X通信;自动驾驶智能网联汽车是指搭载先进传感器、控制器、执行器等装置,融合现代通信与网络技术,实现车与X(车、路、人等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终替代人操作的新一代汽车。
智能网联汽车可以提供更安全、更节能、更环保、更便捷的出行方式和综合解决方案。
1 智能网联汽车的关键技术智能网联汽车其技术架构涉及的关键技术主要有以下6种:1)环境感知技术,包括利用机器视觉的图像识别技术,利用雷达的周边障碍物检测技术,多源信息融合技术,传感器冗余设计技术等。
2)智能决策技术,包括危险事态建模技术,危险预警与控制优先级划分,群体决策和协同技术,局部轨迹规划,驾驶员多样性影响分析等。
3)控制执行技术,包括面向驱动/制动的纵向运动控制,面向转向的横向运动控制,基于驱动/制动/转向/悬架的底盘一体化控制,融合车联网通信及车载传感器的多车队列协同和车路协同控制等。
4)V2X 通信技术,包括车辆专用通信系统,车间信息共享与协同控制的通信保障机制,移动网络技术,多模式通信融合技术等。
5)云平台与大数据技术,包括云平台架构与数据交互标准,云操作系统,数据高效存储和检索技术,大数据关联分析和深度挖掘技术等。
6)信息安全技术,包括汽车信息安全建模技术,数据存储、传输与应用三维度安全体系,信息安全漏洞应急响应机制等。
2 智能网联汽车关键技术发展现状2.1 环境感知技术环境感知系统的任务是利用摄像头、雷达、超声波等主要车载传感器以及V2X通信系统感知周围环境,通过提取路况信息、检测障碍物,为智能网联汽车提供决策依据。
由于车辆行驶环境复杂,当前感知技术在检测与识别精度方面无法满足自动驾驶发展需要,深度学习被证明在复杂环境感知方面有巨大优势,在传感器领域,目前涌现了不同车载传感器融合的方案,用以获取丰富的周边环境信息,高精度地图与定位也是车辆重要的环境信息来源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能网联汽车测试评价关键技术:中国汽车工程研究院智能汽车测试评价中心副主任陈涛博士,针对智能网联汽车的相关技术的测试的核心技术作学术报告。
他主要介绍了智能网联汽车发展情况和一些具体的技术,由三个部分组成。
第一,主要介绍了智能网联汽车相关的发展大背景。
从目前来看,智能网联汽车全球发展主要是为了解决人类所面临的交通安全问题、环境问题,不同于目前的新能源汽车。
从另一个维度看,可以解决现在所面临的问题,例如交通设备问题。
以上是智能网联汽车的定义(今年十月份由中国汽车工业协会正式发布)。
从这个定义里面可以看到几个比较核心的点,它既强调了车上的各类传感器,也强调了我们和未来通信技术、网络技术以及其他领域的交互作用,这才是我们未来发展智能网联汽车的一个非常核心的部分。
从国外的发展来看,智能网联汽车分为几个非常详细的阶段。
目前,从产业化应用的角度来看,我们的ADAS系统已经进入了一个产业化阶段。
从智能化的角度来看,不管是国内还是国外,五年之后,智能网联汽车将会有一个跨越式的进步。
另一方面,从国外的角度来看,网联化发展的情况比国内的要好,它的基本通信技术包括基于通信技术的应用,还有就是它的一些基本的注册已经初具规模。
而国内很有可能在三年后实现国内自主LTV的车—车、车—路的通信技术市场化。
下面是美国的一个综合发展战略,它明确了智能化、网联化两大核心方向,也是其成为世界领先战略地位的两个非常重要的角度。
欧盟是一个协调性的组织,对于欧盟这么大的团体来讲,首要解决的是如何应用这种智能化、网联化的技术去解决安全、道路弱势群体、移动与效率、物流等问题。
日本的计划是非常有野心的,日本目前的智能交通系统在全球是处于最领先的地步,并且想要借助2020年的东京奥约会的机会,提出来要建造世界上最安全的道路。
其中最主要的技术有两类,一类是信息型的支持系统;另外一类是自动驾驶的系统。
从整个技术发展来看,国外注重的自动驾驶技术的一些应用。
从网联化的技术特点来看,网联化是为了未来能实现自动驾驶的一个重要技术支撑。
日本定了一个大的目标,根据它的时间节点来看的话,在2020年建成世界最安全的道路实现他的三级驾驶目标。
而从国内的情况来看,我们定的目标,一些技术和国外的基本保持一致。
我们国内也有一些大的发展和变化,下面是中国制造2025的一个计划。
这样将智能汽、新能源汽车、节能汽车并列为未来三大类未来汽车发展的方向,在这个大的计划支持下这才有了后面相对发展的重点的专项工作。
在这个里面,我们已经非常明确的提出来要突出中国的LET—V的技术特点,国外主要运用的是其他的技术路线,LET—V在国内主要是以大唐、华为为主的主要技术路线。
很可能在两三年之后LET—V这条技术路线会取代802.11p,这条路线用于我们车—车、车—路这条线。
另外一点也就是在支持未来网联化汽车发展的过程当中,智能汽车和智慧交通应用示范的专项工作已经进入到了国家重点支持的项目范畴。
从智能网联汽车的角度来讲,专门把应用示范提出来,不仅是示范验证而且还有测试验证,而最大的原因还是在于这个新的技术和传统车辆的技术测试验证有一些不同之处。
第二,主要讲解是智能网联汽车技术发展的特点和测试验证需求。
的状态,所以说未来在智能化、网联化的发展过程当中中国要想取得领先的优势可能需要把一些跨界的互联网技术引用到智能汽车中,也是在这个大的背景之下才提出网联化分级,网联辅助信息交互、网联协同感知、网联协同决策和控制三级。
对于自动驾驶的分级,中国处于一级阶段辅助驾驶,它仅仅会对单一的方向进行控制,到了二级我们会同时对纵向和横向进行控制,到了三级在大部分情况下实现自动驾驶,到了五级就完全不需要人操作。
整体来看智能网联汽车的发展的技术特点与传统汽车相比较最大的区别就是网联化,网联化的发展为未来的智能汽提供了很大的想象空间,它不仅是一部车和外部的交互,而且为我们后来的大数据的分析提供了非常多的可能性。
未来的车已经不再是单一主体的概念车和路、行人、交通,而是包括我们相关的社会环境是一种系统。
智能网联汽车和传统汽车有很大的区别,对于智能网联汽车的产业规划而言,要出路线图首先要定明确它的边界条件(如下图):上面两幅图是技术路线图总体的一个分级,分为智能化和网联化两个部分。
智能化的分级是参考的美国SAE的基本原则,一共是分为五级,和美国的基本一致,但网联化有一些不同之处,网联化更多的是作为一种通信技术或者是信息提供的一个来源来支持未来的自动驾驶或是智能交通的应用。
中国提网联化的分级主要是为了体现整个政府对于基于通信技术未来汽车发展的重视。
从汽车电子的发展来看国内,还处于一个比较弱势智能网联技术的边界是非常复杂的,车和车、路、后台、其他外部的环境的交互其实已经不能非常清楚分割开来,因为里面有太多的交互内容、有太多的需求。
从上图看车和车是通过通信来联系的,车和路还有其他的和后台是通过不同的通信设施来进行交互,未来的智能网联汽车应该是站在一个大的体系下来进行一个重新的认识。
现在还有许多技术问题如功能安全性、信息安全性、兼容性、人工智能不确定性问题,很多控制算法不能应用上去。
如果能用的话就不叫智能汽车了,只能说是基于传统规则的算法,因此这是一个很大的考验。
为了满足测试过程中的各中需求,保证各种接口能测试得到,还且还要保证测试的效率高、成本低,所以说我们希望在未来的智能网联汽车的验证中更能趋向于现在的虚拟仿真的技术像硬件在环的技术,仿真技术这是我们未来解决庞大的信息交互的复杂环境的一种需求。
第二个才是对开放场地测试,受控场地测试的需求。
第一个问题就是场景数据库的问题,刚刚给大家说的新能源汽车最大的特点就在于它的交互性,它和外部的连接实在是辨不清楚,如果要谈仿真,我们需要首先解决的问题从系统环境需求的角度建立符合中国场景的顶级数据库、建立评价体系。
对中汽院而言,也一直在做相关的工作,进行典型的交通环境的数据的采集及分析,包括典型的行为特性的分析,希望能够把它作为未来智能网联汽车的测试验证的基础的数据库,去支持大规模的硬件仿真。
第二个就是仿真的模型,不管是交通场景的仿真模型,具体的车辆的动力学的模型,还是控制算法的模型,都是一个完整的链。
每一个链条都有一个比较好的解决方案,从目前来讲,传统车辆的算法,包括动力学是可以解决的,麻烦的是环境的这方面的模拟,目前国外有很多这个方面的虚拟仿真的软件,例如PreScan。
国内也还有一些在团队在开发相应的软件,其实核心是环境的模拟,以及传感器的模拟,如何把传感器做到和真实的传感器一致,这可能是一个比较大的挑战。
第三个是问题就是硬件平台,硬件平台里面无碍乎就是我们现在的一些传统的接口电路,控制器,虚拟的板卡,那么这部分的话从传统来讲是比较成熟的。
第三,主要介绍测试场地中国汽研一直非常重视的一部分,叫做“受控场地测试”,受控场地测试它分为好几个部分,首先是一些标准的场地测试,有专门测试标准;那么第二类的话就是如何去支撑研发工程中的测试。
这是目前智能汽车相关的所有的测试的标准:这是典型的一种测试的工况,就是说不同的测试标准会对行人避撞,还有具体的一些典型的场景的要求。
测试的设备,从标准检测的角度需要很多高精度的测试设备,这里面我列了一些从高精度定位的角度,从自动车辆控制的角度有没有加入机器人,有标准的目标车,比如标准的假车,比如说还有行人系统,还有这种叫UFO可以用来做研发测试,这个里面最大的挑战就在于它的精度,我们要求它的控制精度要到达厘米级。
这个是我们具体的测试的场地,我们再中汽院内部有测试的场地。
这个是按照E-NCAP标准的一个测试过程的E V T的拖车,我们做自动紧急刹车的测试,为了保证安全性,这都是特别紧急的场景,所以必须用假车来进行测试,如果用真车的话,那真有可能撞上去。
那比如说在高速状态下,就像80KM/H的状态下是一定会撞上去的,这无论是国内还是国外都有百分之九十的车是会撞的,所以一定会有这种安全的目标,那么如果撞了也没关系,也撞不坏。
所以,应该从专业测试的角度来使用的一些关键的环节。
那么接下来介绍中汽院园区做的一个智能汽车的示范区,同时也正式宣布中汽院智能汽车示范区正式对外发布。
从整个示范区的定位来讲,首先就是新产品的性能试验认证的总情,也是围绕着智能网联汽车以及智能交通涉及到的各个环节;第二是未来我们需要构建一个数据总情;第三会涉及到一些新的技术标准的研究。
从全国来讲其实有好几个,像浙江、杭州、河北、北京、长春,还有像武汉,包括上海,从目前来讲,重庆和上海是全国最早启用的两个地方。
那么这个是怎么搭的框架,这是由中汽院牵头,联合长安等各大车厂来做的这个事情。
那么整个规模包含好几个部分,一个是零部件,然后是模拟城市,这个是在中汽院内部、垫江现场、两江新区都有对应的建设的任务。
这个是中汽院内部的模拟城市的环境的建设,这里面包含了各类典型道路,各类路口、交叉路口、十字路口、包括弯道、隧道、桥梁,各种典型的场景,那么也包含了高精度定位的覆盖,也包括了各种通信的基站,以及一些交通的智能检测的装置,大原则也是去构建这样一个交互的环境,去支持未来智能网联汽车,以及智能交通的测试。
那这个是二期的一些建设,是在垫江试验场,这个目前还是一个比较粗浅的规划,后面还会和长安一起进行一个智能汽车专用现场的详细设计。
这是三期开放道路,开放道路可以看到既包含了以礼嘉为核心的城市的道路,也包含外环一直到鱼嘴的外缘,既包含了各种内环外环的高速路,也包含了一些城市的道路,包括一些乡村路的场景,这个里面我们会安装相应的设施,包括一些监控的设施,收集到的这些数据都会汇总到数据监控中心里面进行统一的管理和调配。
那么提到示范区的整个建设,希望把所有的交通的要素,不如智能网联汽车它是以交互为主的测试体系,所以说这些相关的交通要素和我的环境要素是一定要放大环境的建设里面去的。
程涛博士说,智能网联汽车就是一个比较庞大的体系,需要和不同的技术领域的专家来合作,而重庆在整个汽车产业中,汽车电子都有比较好的基础,我也希望能从中汽院的角度能和行业的各个领域的专家能密切合作,一起把智能网联汽车的工作往前推进。
(本刊编辑部根据录音整理)。