电液伺服系统同步控制研究
港口登船桥升降平台液压同步系统的研究
[1 ]
2012 年第 8 期
液压与气动
45
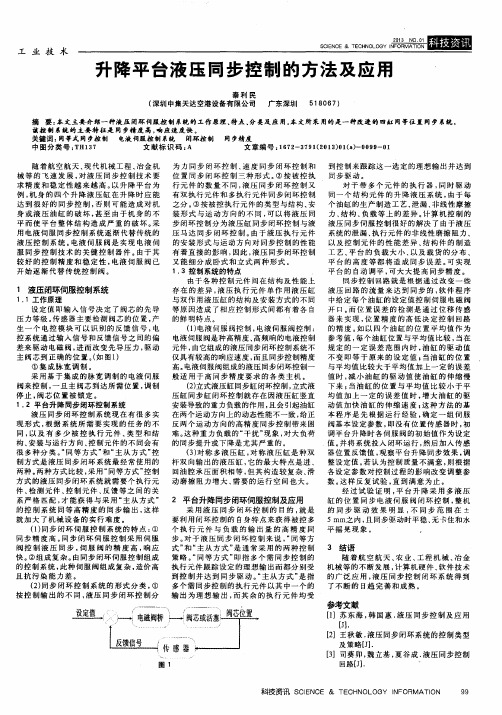
于电液伺服控制。根据登船桥旅客通道两侧为玻璃结 以及液压同步闭环控制系统的技术 构升降的特殊性, 特点, 本文提出了同步马达 + 电液伺服阀放油补偿同 步系统设计方案, 其响应速度快、 抗负载刚度大、 同步 精度高、 控制方便、 可靠性高、 结构简单, 且易于实现计 。 算机控制 3 系统的工作原理 登船桥旅客通道升降平台同步马达 + 电液伺服阀 放油补偿双向同步系统的工作原理如图 1 所示。 止因自重下滑时的超速运行。理论上可实现四缸同步 但实际中由于同步马达和油缸存在制造误差 , 其 运动, 容积效率、 摩擦阻力存在差异, 管路系统及控制元件的 泄漏、 负载不同等因素的影响, 必然导致四缸存在同步 误差。为了消除 4 个油缸在升降过程的同步误差, 回 。 路中设置了同步控制系统 该系统由放油补偿伺服阀 5、 位移传感器 9 、 位移控制模块 10 、 放大器 11 等组成, 回路的显著特点是可实现双向同步精确控制 , 同步控 制精度可达 5 mm 以内。 同步控制原理: 平台上升过程中同步的实现, 系统 始终将运行速度最低的液压缸作为主动缸 , 控制器将 其 运行速度最低的主动缸的位移信号作为标准信号 , 它从动缸的位移信号与之相比较。 用 PLC 作为整个 控制系统的核心, 信号由 PLC 运算处理。 电控器将其 控制阀的流量, 从 输入电压转换为伺服阀的控制电流 , 而控制缸的工作速度。通过各缸的光栅线位移传感器 其输出值为电压 V i , 各缸电压 测出各缸的即时位移, 存在差值反映了四缸伸出长度的不一致 , 将其作为反 馈电路输入, 经放大作为系统负反馈叠加至系统输入 , 端 从而控制从其它速度较快的三个油缸中放出油量 的大小, 即时修正位移, 达到四缸的同步控制目的。平 台下降过程中同步的实现与上升原理相同 。由于伺服
矫直机电液伺服系统的PSO二自由度内模同步控制

要 :对矫 直机 液 压 系统 多缸 同步 伺 服 控 制 方 法 进 行 了 研 究 ,提 出 了对 系 统 采 用 P I D N N辨 识 ,
~ ~ 一 ~ 一 一 一 一 一 一 一 . ~ 藿 一 ~ 一 ~ 一
D h 出 洲 h 一 m 己 吝
B A I L i n , H U A N G Q i n g — X U e , Z H A N G H u a — j u . , Y U E G u a n g
( He a v y Me c h a n i c a l E n g i n e e r i n g Re s e a r c h Ce n t e r o f E d u c a t i o n De p a r t me n t ,
越来越高 ,导致 工艺 过 于复 杂 ,最 终 质量 由矫 直
机完 成 。全 液 压矫 直 机 具 有 节 约 能 源 ,少 投 入 ,
元控制等 。这些算 法 调 整参 数 过 多 ,并 且 只是 一
自由度控 制 ,只 能在系 统 的跟 随性 和鲁 棒性 及 抗
多产 等多种优点 ,使 它越来 越受 到钢厂 的青睐 。
・
5 6・
重 型 机 械
2 0 1 3 NO . 6
矫直机 电液伺服系统 的 P S O二 自由度 内模 同步控制
柏 林 ,黄 庆 学 ,张 华 君 ,岳 光
太原
( 太原 科 技 大 学 重 型 机 械 教 育 部 T程 研 究 中 心 ,山 西
0 3 0 0 2 4 )
协
摘
A 就 可 以独 立调 整 系统 的 目标 跟 随特 性 和 干 扰 抑制 特性 。 因此 ,采用本 文提 出 的二 自由度控 制 方 法可 以使 系 统 同时 具 有 良好 的 目标 值 跟 随 特 性 、干扰 抑制 特性 和鲁棒 特性 。 1 . 2 P I D N N 系统辨识
基于自抗扰和反馈控制的电液位置同步系统
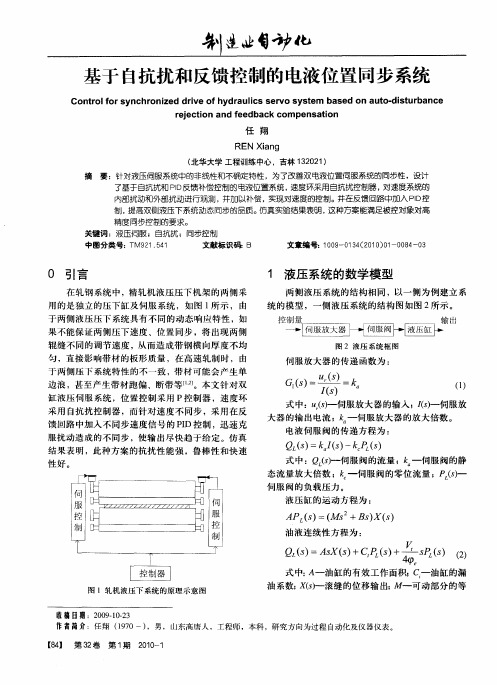
1 液压 系统的数学模 型
两 侧 液压 系统 的结构 相 同 ,以一 侧为例 建立 系
统 的模型 ,一侧 液压 系统 的结 构 图如 图 2所示 。
果 不能保 证两 侧压下 速度 、位 置 同步 ,将 出现两 侧
了基 于自抗扰和 PD I反馈补偿控制的电液位置系统 , 速度环采用 自抗扰控制器 , 对速度系统的 内部扰动和外部扰动进行观测 ,并加以补偿 ,实现对速度 的控 制。并在反馈回路中加入 PD控 I 制 , 高双侧液压下系统动态 同步的品质。仿真实验结果表 明 , 提 这种方案能满足被控对象对高
() 3
差 反馈 ”设计 出理 想 的控 制器 。在非 线性 状 态误差
G ) =
= i V 2 t
—
kn ks
反 馈控 制 器 中 ,由于扩张 状 态观 测器 能 实时观 测 未
伺服 放大器 的传 递 函数 为 :
边 液压伺 服 系统 ,位置 控制 采用 P控 制器 ,速 度环 采 用 自抗扰 控制 器 ,而针 对速 度不 同步 ,采 用在 反 馈 回路 中加 入不 同步 速度信 号 的 PD控 制 ,迅速 克 I
精度 同步控制的要求。 关键 词 :液 压伺服 ;自抗扰 ;同步控制 中图分类号: M9 1 5 1 T 2 .4 文献标识码: B 文章编号: 0 - 14 2 1 )l 0 8 — 3 1 9 0 ( 0 o o - 04 0 0 3
0 引言
在轧钢 系统 中,精 轧机 液压压 下机 架 的两 侧采
辊 缝不 同的调 节速度 ,从而 造成带 钢 横 向厚 度不 均
高频响电液伺服阀与比例阀在机器人控制中的应用研究

高频响电液伺服阀与比例阀在机器人控制中的应用研究摘要:机器人技术在自动化领域中发挥着越来越重要的作用。
高频响电液伺服阀和比例阀是机器人控制中的关键元件,它们能够实现精确且快速的运动控制。
本文将研究并探讨高频响电液伺服阀与比例阀在机器人控制中的应用,包括其原理、优势以及在不同领域中的具体应用案例。
1. 引言随着科技的发展,机器人技术逐渐成为各个行业中提升生产效率和质量的重要工具。
机器人控制系统中的高频响电液伺服阀和比例阀起着重要作用,能够实现精确、高速的运动控制。
本文将对这两种元件的原理进行研究,并探讨它们在机器人控制中的应用案例。
2. 高频响电液伺服阀原理高频响电液伺服阀是一种通过电流信号控制液压流量的元件。
其原理是通过电压信号的输入,驱动电磁铁开关阀芯,从而控制液压流量的大小。
高频响电液伺服阀具有响应速度快、工作精度高等优点,在机器人控制中扮演重要角色。
3. 高频响电液伺服阀在机器人控制中的应用3.1 机械臂运动控制在机器人的机械臂运动控制中,精细的运动调节是十分关键的。
高频响电液伺服阀能够快速响应和实现高精度的控制,从而使机械臂的运动更加准确和稳定。
3.2 机器人协作在多台机器人协作的场景中,高频响电液伺服阀可以实现机器人之间的精确同步控制。
例如,当一个工作任务需要多台机器人同时进行配合时,高频响电液伺服阀能够确保多台机器人动作的一致性和准确性。
4. 比例阀原理比例阀是一种通过改变控制信号的电流或电压大小来调节阀口开度的元件。
其原理是根据输入信号的大小,改变阀芯的开度,从而控制流体的流量。
比例阀具有调节范围广、工作精度高的优点,在机器人控制中应用广泛。
5. 比例阀在机器人控制中的应用5.1 工作环境控制在一些特殊的工作环境中,机器人需要根据外界环境的变化来调节自身的动作。
比例阀可以根据传感器信号的变化,实时调节机器人的动作,从而适应不同的工作环境。
5.2 工装夹持力控制在某些工装夹持任务中,精确的夹持力是非常重要的。
双缸同步提升电液系统建模和控制
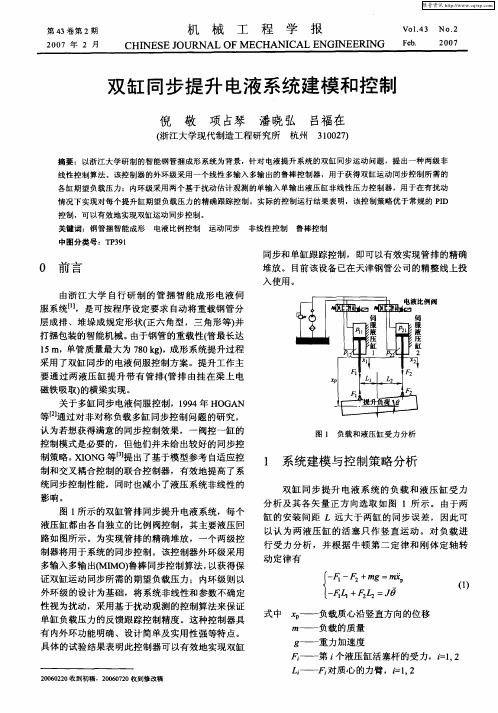
图 1 示 的双缸 管排 同步提 升 电液 系统 ,每个 所 液压 缸都 由各 自独立 的 比例 阀控 制 ,其 主要 液压 回
路如 图所 示 。为实现 管排 的精确 堆 放 ,一个 两级控
制器将 用 于系统 的同步控 制 。该控 制器外 环 级采用
f●● -
oXo —— 液压缸 的稳 态负 载压 力 , 6 ]
— —
f — — 第 i个 液 压 缸 的 无 杆 腔和 有 杆 腔 面 l , 恐
积 ,i 12 = .
液压缸 的期 望 负载力
V = 1 F 2 p [ p ]
而—— 第 f 液压 缸沿 竖直 方 向的位移 个 m — — 第 i 液压 缸 的活塞杆 质量 ,i 12 f 个 = .
中 图 分类 号 :T 3 1 P 9
电液 比例控制
运动 同步
非线性控制
鲁棒控制
0 前 言
由浙 江 大 学 自行 研 制 的管 捆 智 能成 形 电 液 伺 服 系统 【,是可按 程序 设 定要 求 自动将 重 载钢 管分 J J
同步 和单 缸跟 踪控制 ,即可 以有 效实现 管 排 的精 确 堆放 。 目前 该 设备 已在 天津钢 管 公司 的精 整线 上投
式中
‰—— 负载 质心 沿 竖直方 向的位移
— —
负载 的质 量
g ——重力加速度 第i 个液压 缸 活塞杆 的 受力 ,i 1 2 = ,
— —
厶—— 对质 心 的力臂 ,卢l2 ,
20 0 2 到初稿 ,20 0 2 到修 改稿 06 20收 06 70收
维普资讯
入使 用 。
基于智能算法的多缸同步控制系统研究
选取 两缸 同步控 制 系统 作 为研 究 对象 , 再 多 几 个
缸 的情形 类似 , 主要 是 以其 中一个 缸 的运动作 为标准 , 其他 缸来 跟 随这个 标 准 缸 。其 工 作 原理 如 下 : 活 动 横
梁 为工作 平 面 , 滑块 的左 、 右 两端 分别装 有位 置检测 装
r E
L — — — — — — 垡 重 堡 壁 堡r _ — — — — — — — 一
图 2 单 回 光 栅尺 ( 也 可 以选 择 磁栅 尺 ) ; 光 栅尺 将 检 测 到 的 检测值 传送 到 同步 控 制器 进 行 分 析处 理 , 经 过 所设 计 的算法 控 制 , 得 出相 应 的控 制作 用 量 ; 经D / A 转换 器 转换 , 用 得 到 的控 制 信 号 来控 制 液压 阀向运 行 较 慢 的 一个油 缸补偿 油 量 , 从 而 使慢 行 的油 缸赶 上 超 前 的
第 5期 ( 总第 1 8 0期 ) 2 0 1 3年 l O月
机 械 工 程 与 自 动 化 ME CH ANI CAL ENGI NEERI NG & AUTOM ATI ON
N0. 5 Oc t .
文章 编 号 : 1 6 7 2 — 6 4 1 3 ( 2 0 1 3 ) 0 5 — 0 1 4 0 — 0 3
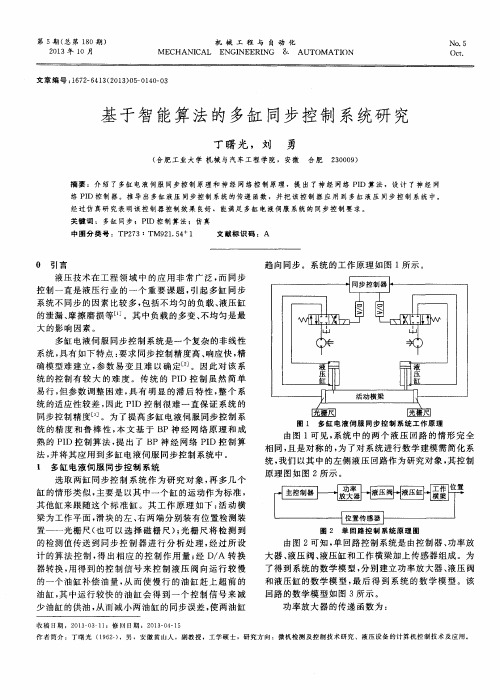
0 引 言
趋 向同步 。系统 的工 作原 理 如图 1所示 。
液压 技术 在工 程 领域 中 的应 用 非 常广 泛 , 而 同 步 控制 一直 是液 压行 业 的一 个 重 要 课题 , 引起 多 缸 同 步 系统 不 同步 的因素 比较 多 , 包 括不 均匀 的负载 、 液压缸 的泄 漏 、 摩 擦磨 损等 ] 。其 中负载 的多变 、 不 均匀 是最 大 的影 响因素 。 多缸 电液伺 服 同步 控制 系统 是一个 复杂 的非线性 系统 , 具有 如 下特点 : 要 求 同步控制 精度 高 、 响应 快 , 精 确模 型难 建立 , 参数 易 变 且 难 以 确 定[ 2 ] 。因此 对 该 系 统 的控制 有 较 大 的难 度 。传 统 的 P I D 控 制 虽 然 简单 易行 , 但参 数 调整 困难 , 具有 明显 的滞后 特 性 , 整 个 系 统 的适应 性较 差 , 因此 P I D控制 很 难 一直 保证 系 统 的 同步控制 精度c 3 ] 。为 了提 高 多缸 电液 伺 服同步控 制 系
双缸电液位置伺服同步控制系统的智能控制

第 l 期 1
西
安
交
通
大
学 学
报
V o. 5 N O 1 14 .1
NO . 2 1 V O1
2 1 年 1 月 01 1
J OURNAL OF XIAN I JAOTONG UNI VERSTY I
双 缸 电液 位 置 伺 服 同步 控 制 系统 的 智 能控 制
DE io ,S W e bn ,GUO n a g ,L N Ta HANG An NG Ba U n i Qiy n I o ,Z
( . c o l f c a i l n i e r g i n J o o gUnv ri , n 7 0 4 , h n ; 1 S h o o Me h nc gn e i ,X i t n ie s y Xi 1 0 9 C ia aE n a a t a
2 Th e o d Ari ey En ie rngI siut . eS c n tl r gn e i n tt e,xia 1 0 5,Chn ) l n7 0 2 ia
Ab ta t Ai ig a h e u rm e t ft eh g r cso n a tr s o s n ee to h d a l sr c : m n tt er q ie n so h ih p e iin a d f s ep n ei lcr — y r u i c p sto e v y c r ncc n r ls se t o b ec l d r ,p o o t n l n e r t n dfe e — o iin s r o s n h o i o to y tm wi d u l yi e s r p ri a— tg ai - i r n h n o i o f ta t r t e1a nn o to ta e y wa mp o e o d sg n mp e e tt e c n r 1s se il e ai e r i g c n r lsr t g se ly d t e in a d i lm n h o to y tm i v wh r wo co e —o pa dt —e e o to r d p e om a et et lcr y r ui o i e et -l s d- o n wo lv l n r l l — c we ea o t dt k h woee toh d a l p s- — c — to e v y tms ta k e c t e n n u et ed n m i s n h o ia in o h o b ec l — in s r o s se r c a h o h ra d e s r h y a c v c r nz to ft ed u l yi n d r .Th o i o ro ewe n t yi d r n o s se o t u in l sfd b c i h es ep st n e r rb t e woc l e si t y t m u p tsg a i n wa e a k whl t e e
拖曳收放系统的电液伺服研究
Re s e a r c h o n El e c t r o- hy d r a ul i c S e r v o S y s t e m o f Re l e a s i ng a n d Re t r a c t i n g To wi n g Sy s t e m
拖曳 收 放 系统 的 电液 伺 服研 究
姜飞龙 ,鄢华林 ,李亚南,袁威 ,周超 ,赵 瑞
( 江 苏科技 大 学机 械 工程 学院 ,江 苏镇 江 2 1 2 0 0 3 )
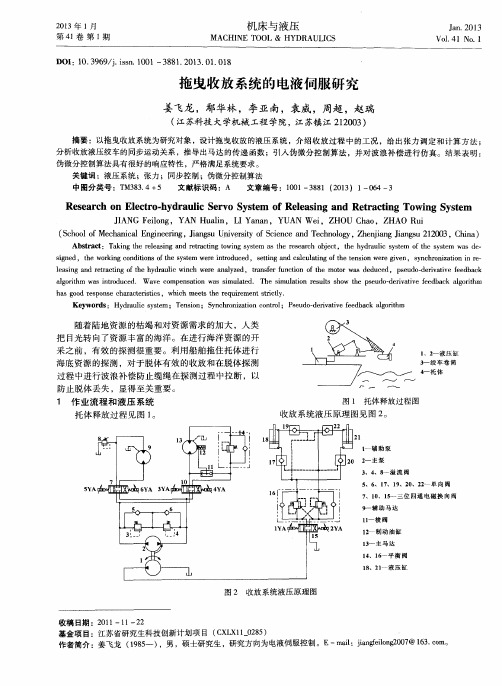
摘要 :以拖曳收放系统为研究对象 ,设计拖 曳收放 的液压 系统 ,介绍 收放过程 中的工况 ,给 出张力 调定 和计 算方 法 ;
2 0 1 3年 1 月 第4 1卷 第 1 期
机床与液压
MACHI NE TOOL & HYDRAUL I CS
J a n . 2 0l 3
Vo 1 . 41 No .1
DOI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 0 1 . 0 1 8
A b s t r a c t :T a k i n g t h e r e l e a s i n g a n d r e t r a c t i n g t o w i n g s y s t e m a s t h e r e s e a r c h o b j e c t ,t h e h y d r a u l i c s y s t e m o f t h e s y s t e m w a s d e —
s i g n e d, t h e wo r k i n g c o n d i t i o n s o f t h e s y s t e m w e r e i n t r o d u c e d,s e t t i n g a n d c a l c u l a t i n g o f t h e t e n s i o n w e r e g i v e n ,s y n c h r o n i z a t i o n i n r e l e a s i n g a n d r e t r a c t i n g o f t h e h y d r a u l i c wi n c h w e r e a n a l y z e d, t r a n s f e r f u n c t i o n o f t h e mo t o r w a s d e d u c e d,p s e u d o — d e f v a t i v e f e e d b a c k a l g o r i t h m w a s i n t r o d u c e d . Wa v e c o mp e n s a t i o n w a s s i mu l a t e d .T h e s i mu l a t i o n r e s u l t s s h o w t h e p s e u d o — d e r i v a t i v e f e e d b a c k a l g o r i t h m h a s g o o d r e s p o n s e c h a r a c t e is r t i c s ,w h i c h me e t s t h e r e q u i r e me n t s t r i c t l y . Ke y wo r d s : Hy d r a u l i c s y s t e m; T e n s i o n ;S y n c h r o n i z a t i o n c o n t r o l ;P s e u d o — d e iv r a t i v e f e e d b a c k a l g o r i t h m
升降平台液压同步控制的方法及应用
升 降平 台 液 压 同步 控 制 的 方 法 及 应 用
秦利 民 ( 深圳 中集天达 空港设备 有 限公 司 广 东深圳 5 1 8 0 6 7 ) 摘 要: 本文 主要介 绍一种液 压 闭环 伺服控 制 系统 的工作 原理 、 特点, 分类及 应 用。 本文所 采 用的是一种 改进 的四缸 同等位置 同 步系统, 霞控 制 秉统 的主要 特征是 同步精度 高 , 响应速 度 快 关键词 : 同等式同 步控制 电液 伺服控 制 系统 闭环控 制 同步精度 中 图分 类 号 : T H1 3 7 文献标识码 : A 文章 编号 : 1 6 7 2 - 3 7 9 1 ( 2 0 1 3 ) 0 1 ( a ) 一0 0 9 9 — 0 1 随着航空航天 、 现代机械工程 、 冶 金 机 械 等的飞速 发展 , 对 液 压 同 步 控 制 技 术 要 求精 度和稳定性 越来越高 。 以 升 降 平 台 为 例 , 机 身 的 四 个 升 降 液 压 缸 在 升 降 时 应 能 达 到很好的 同步控制 , 否 则 可 能 造 成 对 机 身或 液压油缸 的破坏 , 甚 至 由 于 机 身 的 不 平 而 使 平 台 整体 结 构 造 成 严 重 的 破 坏 。 采 用 电液 伺 服 同 步 控 制 系 统 逐 渐 代替 传统 的 液压控 制系统 。 电 液 伺 服 阀 是 实 现 电液 伺 服 同步 控 制 技 术 的 关 键 控 制 器 件 。 由于 其 较好 的控制精度 和稳定性 , 电 液 伺 服 阀 已 开始逐渐代 替传统控制阀 。 为 力 同 步 闭环 控 制 、 速 度 同 步 闭 环 控 制 和 位 置同步闭环控制 三种形式 。 ② 按 被 控 执 行元件 的数量不 同 , 液 压 同步 闭 环 控 制 又 有 双 执 行 元 件 和 多 执 行 元 件 同 步 闭 环控 制 之分 。 ③ 按 被控 执 行 元 件 的 类 型 与 结 构 、 安 装形式 与运动方 向的不 同 , 可 以 将 液 压 同 步 闭 环 控 制 分 为 液 压 缸 同 步 闭 环控 制 与 液 压马达 同步闭环控 制。 由于 液 压 执 行 元 件 的 安 装 形 式 与 运 动 方 向 对 同 步 控 制 的 性 能 有着直接的影响 , 因此 , 液 压 同 步 闭 环 控 制 又能细分成 卧式和立式两种 形式 。 1 . 3控 制 系统 的特 点 由于 各 种 控 制元 件 间 在 结 构 及 性 能 上 存在 的差异 , 液 压 执 行 元 件 单 作 用 液 压 缸 与 双 作 用液 压缸 的结 构及 安 装 方式 的不 同 等 原 因 造成 了相 应 控 制 形 式 间都 有 着各 自 的 鲜 明特 点 。 、 ( 1 ) 电液 伺 服 阀 控 制 , 电液 伺 服 阀 控 制 : 电液 伺 服 阀是 种 高精 度 、 高 频 响 的 电液 控制 元件 , 由 它组 成 的液 压 同步 闭 环控 制 系统 不 仅具 有 较高 的 响应 速 度 , 而 且 同步 控 制精 度 高。 电 液伺 服 阀组 成 的液 压 同 步 闭环 控制 一 般 适 用 于 高 同步 精 度 要 求 的 各 类 主机 。 ( 2 ) 立式 液压 缸 同步 缸 闭环 控 制 , 立式 液 压 缸 同步 缸 闭环 控 制 就 存 在 因液 压 缸 竖 直 安 装 导 致的 重 力 负载 的 作用 , 且 会 引 起油 缸 在两 个 运动 方 向上 的动 态性 能 不 一致 , 给 正 反 两个 运 动 方 向 的高 精 度 同步 控 制 带 来 困 难。 这种重力负载的“ 干扰 ” 现象 , 对 大 负 荷 的 同步 提 升 或 下 降是 尤 其 严 重 的 。 ( 3 ) 对称多液压缸 , 对 称 液 压 缸 是 种 双 杆 双 向输 出的 液 压 缸 , 它 的最 大 特 点是 进 、 回油 腔 承 压 面 积 相 等 , 但其构造较复杂 、 滑 动磨擦 阻力增大 、 需要的运行空 间也大。 到 控 制 来 跟 踪 这 一 选 定 的 理 想 输 出 并 达 到 同步 驱动 。 对于带 多个元 件的 执行 器 , 同 时 驱 动 同一 个 结 构 元 件 的 升 降 液 压 系 统 , 由于 每 个油缸的生产制造工艺、 泄漏 、 非 线 性 摩 擦
模型参考和重复控制在电液伺服协调加载系统中的应用研究

( hn u y rnn eT s C ne , ai h ax 7 4 0 ,C ia C iaH a i O d a c et etr HuynS an i 2 0 n 1 hn )
Ab t a t T e c n r ls a e y o d lr fr n e c n r la d r p t ie c nr l n c mb n t n wa r p s d I wa p l d t s r c : h o t t t g fmo e e ee c o t n e ei v o t o i ai s p o e . t s a p i o o r o t o i o o e t e mu i h n e lc r y r u i h r n z d s n h o - r e s r o l a i g s se h h - a n lee ti h d a l a mo ie y c r n f c e o d n y tm.T e c n r la i t ft e s se w s d mo s a c c c o h o t b l y o y tm a e n t — o i h r t d,a d t e c mp trr a i t n f rag r h wa i e .T e s lt n r s l h w a e s se s l- d p ie a i t mp v d e n h o u e e l a i o i m sg v n z o o l t h i a i e u t s o t tt y t m e f a t l y i i r e mu o s h h a v b i s l w n p s n h o o sp e i o n o u t e sa e i r v d y t i o to t tg r y n h ol i g u y c r n u r cs n a d r b sn s r mp o e ,w ih i u e s rf r n e f rs n o i h c s s d a ee e c y - o c r n u o t lo o h o o s c nr f mmo n et i y tm. o c nu c r ns s a e
电液伺服系统的同步控制研究
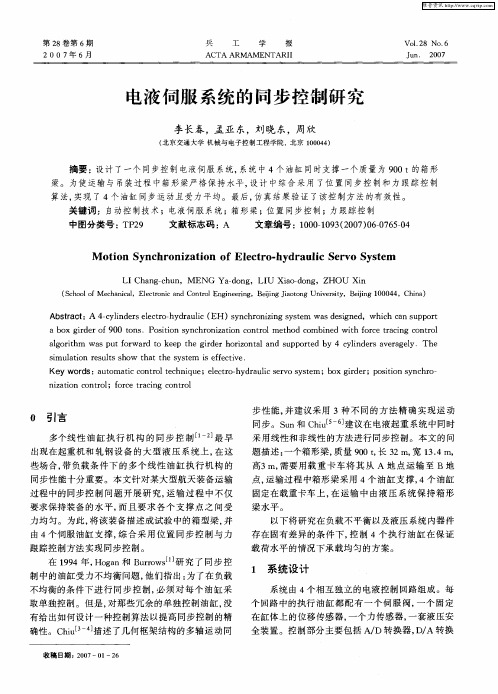
题描 述 : 一个箱形 梁, 量 9 0t长 3 宽 1 . m, 质 0 , 2m, 3 4 高3m, 需要 用 载重 卡 车 将 其 从 A 地 点运 输 至 B地 点, 输过 程 中箱 形梁 采用 4个 油 缸支 撑 , 油缸 运 4个 固定在 载重 卡车 上 , 运输 中 由液 压 系统 保持 箱 形 在
维普资讯
第 2 卷 第 6期 8
20 07年 6月
兵
工
学
报
Vo . 8 12 NO 6 .
A CTA ARM AM ENTAR I I
J n. 2 0 u 07
电液 伺 服 系统 的 同步 控制 研 究
李长春,孟亚 东,刘晓东,周欣
a b x gr e f 0 o s o i ro 0 t n .Po iin s n h o ia in c n r l t o o i e t o c r cn o to d 9 st y c r n z t o to o o me h d c mb n d wi f r e ta i g c n r l h ag r h wa u o wa d t e p t e g r e o io t l n u p r e y 4 c l d r v r g l .Th l o i m sp t r r o k e h id r h rz n a d s p o t d b y i e sa e a ey t f a n e
出现在起重 机和 轧钢 设备 的大 型 液 压系 统 上 , 这 在 些场 合 , 负载 条件 下 的 多个 线 性 油缸 执 行 机 构 的 带 同步性 能十分重 要 。本 文针 对某 大型航天 装备 运输
过程 中 的同步控 制 问题 开 展 研 究, 输 过 程 中 不仅 运 要求保 持装备 的 水平 , 而且 要 求 。为此 , 将该 装备 描述 成试验 中的箱型梁 , 并 由 4个 伺服油 缸 支撑 , 合 采 用 位置 同步 控制 与 力 综 跟踪控 制方法 实现 同步控 制 。
电液位置同步伺服系统的模糊控制研究

和 k一1 别 表示 离散 时间 系统 的 当前 时 刻和前 一 时 分
复合控制器 , , 系统 具有 鲁棒 胜和精 确 性 为 r 使 验 证控 制性能 ,本 文将 这种 控制 器应 用 于 电液位 置 同步
系统的实时控 制 。 位置 同步系统 的结 构差异会 带来不同的控制 效果 ,
2 u 一PD复合控 制器 的设计 F z I
括死区 、摩擦和滞环 等 的非 线性 环 节 又是未 知 和时变
的。为解决上述 问题 ,很 多 研究 已被提 出 ,但 各有缺
陷 ,例如 PD控 制 器很 难 获得 满意 的效果 .自适 应控 I
制器通常要求较快 的 C U执行 速 度 .对于 时变性 较 陕 P 的液压控制系统难 于达到 良好的实 时性 。 自从模糊控 制 器 出现 以来 ,得 到 了广泛 应用 一通 常模糊控制器 由语 言 性控 制规 则 构成 .对于 输 八和输
维普资讯
《 机床与液压》90 o 1 , 2 N 0
・8 3
电液 位 置 同步 伺服 系统 的模 糊控 制研 究
管杨 新 ,胡 大邦 , 王 奕豫
( 炭 科 学研 究 总 院 上 海 分 院 液 压研 究 所 ,90 3 ) 堞 _ 00 0
本文对 同步 系统 中常用 的两种 控 制策 略进行 了 比较 和 分析 因 为它 们各 自都 有局 限性 ,所以综 台采 用两 种
策略的 同步系统可 获得更好的 动态和稳态特性 。 1 电液位置 同步控 制 系统 的组成
图 2 模 糊控制 系统方框图
采用 7个语言 模 糊集来 描述 所 有的输 入 、输 出模
P M P B P 8
P M P B
( )并 、串复台联接 C
电液伺服系统同步控制研究

两个 系 统共用 一 个 液压 泵 站 , 站 采 用 恒压 变 量 泵
随着 液压技 术在 工 程 领 域 中 的应 用 1 扩 大 , 3益 大 型设 备负 载能力 增加 或 因布局 的关 系需要 多个 执行元 件 同时驱 动一个 工作 部 件 , 因此 同 步控 制 就 显 得越 来 越重要 了。但 由于每 一个 液压 系 统 的 泄 漏 、 控制 元 件 间 的性 能差异 、 执行元 件 间负载 的差 异 、 各 系统各 组成 部分 的制造误 差等 因素 的影 响 … , 造 成 多执 行 机 构 将 的同步误 差 , 果不 有 效 地加 以控 制 并 克 服这 种 同步 如 误差 , 系统将不 能正 常工 作 。 本文 以北京 市科 委 支 持 项 目为背 景 , 以北 京 交 通 大学 液压伺 服控 制实验 室 夹持 同步控 制试 验平 台 的阀 控非 对称液 压缸 为研 究 对 象 , 夹持 同步 控 制 进 行试 对
( 聊城大学 汽车与交通工程学院 ,山东 聊城
2 20 ) 50 0
摘
要 : 文 以电液伺服 系统 的 常用执行 机 构 阀控 非对 称缸 为研 究对 象 , 同步对顶伺 服 系统进 行分析 该 对
和 试验研 究 , 建立 同步控 制 系统位 置扰动 型 力 学模 型 , 出位 置 闭环 一力跟 随控 制 策略 , 过 试验 实现 亍对 提 通
图 1 同步控制实验平台系统结构图
从事 自动控制 与液压控 制方 面的科研 和教学工作。
2
液压 与气动
21 0 0年第 6期
假设 以右边 的施 力 系 统 为 研究 对 象 , 边 的位 置 左 系 统为受 力对象 。得 到施力 机构 的力 方程
电液伺服控制系统及其在TRT中的应用

维普资讯
20 年 2月 第一期 05
电液伺服控制 系统及其在 T T中的应 用 R
4 3
负载压力、 负载流量和消耗功率间的关系, 从而为
1
2频宽( ) 幅频宽和相频宽) 伺服阀通常以幅 值比为 一3B时的频率区间作为幅频宽, d 以相位滞 后 9。 0的频率区间为相频宽。频宽是伺服阀动态响 应速度的度量。根据系统执行元件的频率选择伺
阀的磨损程度。
122 动态特性 ..
1频率 响应 电液伺服 阀的频率 响应是 , ) 输入 电流在某一频率 范 围内作 等 幅变频正 弦变化 时空
载流量 与输 入 电流 的复数 比。频率 响应 用 幅值 比
用第一级静叶可调控制 , 一级静叶可做到全关 且第
闭, 并确保透平机调速 、 网 、 并 调功率和控制炉顶压
0 概述
在现代电子学 和计算机控制与液压传动密切 结合的条件下 , 电液伺服阀在 自动控制技术中得到
了广泛的应用 , 起着精确地控制执行机构的工作位
喷嘴或单喷嘴) 和射流管式三种; 4功率放大器( ) 滑阀放大器)由放大器输出的 ,
液体具有一定的压力, 驱动执行元件进行工作。 T T机组采用了 C D 3 0 R S Y —10型射流管电液 伺服阀。射 流管电液伺服同典型结构示意见图 1 。
标准的 5 级 , ~6 射流管式伺服阀要求为 N S68 A 13
标准 的 8 。 级
3射流管阀的压力效率和容积效率高, ) 可以产
生较大 的控制压力 和流量 , 就提高 了驱 动力 , 这 增
启动 、 常运行 和 紧急停 机时 , 正 可根据 各过程 的控 制要求 , 通过设 定不 同的给定值 , 实现 各个过程 的
电液双缸系统同步控制

doi:10.11832/j.issn.1000-4858.2021.02.005电液双缸系统同步控制张兵,蒋子良,黄华,蔡佳敏,谢昌昊,张新星,钱鹏飞(江苏大学机械工程学院,江苏镇江212013)摘要:由于强非线性和强耦合作用严重影响双缸同步系统的控制精度,同步误差加剧试件变形内力,具有较强的破坏能力,因此研究具有优良性能的同步控制算法具有重要的实践意义。
建立考虑系统安装误差、测量误差、负载刚度和伺服阀零偏等因素在内的双液压缸同步控制系统数学模型;分析上述各误差因素对双缸同步控制精度的影响机理;提出了基于内力补偿和位置补偿的自由度控制策略,实现双液压缸高精度位置同步和出力的高度一致性;最后,运用MATLAB/Simulink软件对双缸自由度同步控制算法进行仿真分析,验证了控制策略的有效性。
关键词:同步控制;自由度控制;内力补偿;位置补偿;MATLAB/Simulink仿真验证中图分类号:TH137文献标志码:B文章编号:10004858(2021)02-0030-06Synchronous Control of Electro-hydraulic Dual Cylinder System ZHANG Bing,JIANG Zi-liang,HUANG Hua,CAI Jia-min,XIE Chang-hao,ZHANG Xin-xing,QIAN Peng-fei (School of Mechanical Engineering,Jiangsu University,Zhenjiang,Jiangsu212013)Abstract:The control precision of two-cylinder synchronous system is seriously affected by strong nonlinear and coupling effects.The synchronous error aggravates the internal force of specimen deformation and has a strong failure ability.It is of great practical significance to study the synchronization control algorithm with excellent performance.The mathematical model of dual hydraulic cylinder synchronous control system is established,which considers installation error,measurement error and servo valve zero deviation.The influence mechanism of the above error factors on the accuracy of dual-cylinder synchronous control is analyzed.A dof control strategy based on internal force compensation and position compensation is proposed to achieve high precision position synchronization and output consistency of dual hydraulic cylinder.Finally,MATLAB/Simulink software was used to analyze the two-cylinder dof synchronization control algorithm and verify the effectiveness of the control strategy.Key words:synchronous control,degree of freedom control,internal force compensation,position compensation, MATLAB/Simulink simulation verification引言当2个以上执行机构共同工作时,需要考虑同步控制问题。
电液控制技术应用(论文)
电液控制技术应用(技术论文)中国冷库2012-2-27目录前言 (3)1.电液控制概述 (3)1.1 电液控制技术概述 (3)1.2电液比例控制技术概述 (4)1.3 电液伺服技术概述 (5)2.电液控制工程应用实例的介绍 (6)2.1汽车起重机的用途介绍 (6)2.2汽车起重机伸缩回路系统的类别 (6)2.3汽车起重机伸缩回路系统的结构 (6)2.4汽车起重机伸缩回路系统的工作过程 (6)2.5汽车起重机伸缩回路系统的性能特点 (7)3.电液控制技术与机电一体化技术的关系 (7)参考文献 (7)【摘要】电液控制技术广泛应用于现代工业中, 是工业发展水平的重要标志。
本文就电液技术发展历程、电液控制的技术特点、电液技术的应用范围等进行探讨。
并以ZY50型汽车起重机伸缩回路系统为例,介绍了ZY50型汽车起重机的用途以及电液控制技术在此机械系统中的应用,其与所学机械电子工程专业之间紧密结合的认识,并针对电液控制工程技术提出自己的看法很感想。
【关键词】电液比例技术机电一体化汽车起重机应用前言从上世纪六七十年代以来,电液控制技术已广泛应用于现代工业中, 是工业发展水平的重要标志。
现今,电液控制技术已经成为工业机械、工程建设机械及国防极端产品不可或缺的重要手段。
以挖掘机、推土机、振动压路机等为代表的工程机械对国家基础设施建设起到了至关重要的作用,而火炮控制系统、导弹运输车中的电液控制技术则推动了我国国防实力的提升。
电液控制技术在机床加工、交通运输、汽车工业等部门也有非常广阔的应用。
他对我国国民经济的推动作用不可估量。
就所学机械电子工程专业来讲,电液控制技术与其密不可分。
电液控制技术的调控精密度对于机械控制有着重要的意义。
在电子计算机大行其道的今天,将电控、液压与机械紧密结合在一起,才是机械电子工程的发展新方向。
1.电液控制概述1.1 电液控制技术概述电液控制技术发展历程。
液压技术早在公元前 240 年的古埃及就已经出现。
基于ATmega16L的电液伺服控制系统设计

基于ATmega16L的电液伺服控制系统设计李禹萱;李云红【摘要】针对电液伺服闭环控制过程中,设定信号不断发生变化,电液阀门位置定位精确度较低的难题.采用AT-mega16L作为核心控制器,并配有高精度A/D、D/A 转换器,通过对阀门开度控制信号和位置反馈信号进行采集、转换、计算和比较,发出控制信号决定并执行换向阀的换向、交流伺服电动机的起停运转,推动液压缸推杆的伸缩,进而对阀门转角大小、开度百分比进行精确定位.%In the process of electro-hydraulic servo closed loop control, set signals are constantly changing and electro-hydraulic valve location accuracy is low. Through the acqusitiion, transformation, calculation and comparison of signals to control valve opening and position feedback signals, the system with ATmegal6L as the core controller, equipped with high-precision A/D and D/A converters, sends a control signal to determine and perform the reversing of reversing valve and the operation of AC servomotor, promote the stretching of hydraulic cylinder rod, and thus realizes the precise position of the valve angle size and the opening percentage.【期刊名称】《现代电子技术》【年(卷),期】2012(035)019【总页数】4页(P141-144)【关键词】单片机微处理器;伺服控制;阀门位置;RS 485通信【作者】李禹萱;李云红【作者单位】西安电子科技大学机电工程学院,陕西西安710126;西安工程大学电子信息学院,陕西西安710048【正文语种】中文【中图分类】TN911.7-34;TP2730 引言随着电力电子技术、电机控制技术、计算机技术和传感器技术的发展,交流伺服控制技术已逐步取代了传统的直流控制技术,越来越多地应用到各种工业控制领域中。
基于AMEsim_Simulink的电液伺服比例控制的同步回路建模与仿真研究

2
同步系统组成及原理
电液伺服比例阀控非对称液压缸同步系统的原 理图如图 1 所示。 两个液压缸的结构和参数完全相同 , 用电液伺服 比例阀控制, 设定值与速度传感器输出信号的差值作 , 为阀的控制信号, 系统的控制策略采用“同等方式 ” 即两个同步液压缸同时跟踪设定的理想输出 , 分别受
收稿日期: 2012 - 04 - 20 作者简介: 于宗振( 1987 - ) , 男, 山东临沂人, 在读硕士, 主要从事机电系统控制方面的研究。
2 2 1
2( 1 + n ) βe A Vt
槡
2 Vt ( 1 + n2 ) β e m
]
的固有频率, 该值可从产品样本提供的伯德图上查 到; ξ sv 为伺服比例阀的阻尼比; 由式 ( 7 ) ~ ( 10 ) 可绘 出对称阀控非对称液压缸位置控制系统方框图如图 2 所示。 由图 2 可求得对称阀控非对称液压缸位置控制
*
( 3 ) 有些产品为了解决零漂问题, 设置了 第 4 位, 还可实现断电时的安全保护。 伺服比例阀内装放大器, 具有伺服阀的各种特 — — — 、 、 , 性 零重叠 高精度 高频响 其工作频宽和性能已 达高性能伺服阀, 而成本仅为伺服阀的 1 /3 , 对油液 清洁度要求比伺服阀低, 工作更可靠, 可用于位置、 压 [1 ] 力等要求无零位死区的闭环控制 。 笔者以电液伺服比例阀控非对称液压缸为研究 建立了电液伺服比例阀液压同步控制系统的数 对象, 学模型, 设计了 PID 控制器对同步系统的控制性能进 行优化。并利用 AMESim 和 Simulink 软件对双缸同 步液压系统进行了联合仿真, 仿真结果表明, 采用伺 服比例阀可以实现较高精度的同步控制 。
·机械研究与应用· 2012 年第 3 期 ( 总第 119 期)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 2 外 力扰动型施力系统
收稿日期: 2010 03 23 作者简介: 顾凯 ( 1983 ) , 男, 山东聊 城人, 助 教, 硕士, 主要 从事自动控制与液压 控制方面的科研和教学工作。
2
液压与气动
2010年第 6期
假设以右边的施力系统为研究对象, 左边的位置 系统为受力对象。得到施力机构的力方程
模糊自适应 P ID 控制器的实现分为两部分。第一 部分为利用 M atlab 的模糊控制箱 ( Fuzzy Contro l Box ) 实现自适应 模糊 P ID 算法; 第二部分 利用 M atlab 的 Rea l T im e W o rkshop( RTW ) 将生成的自适应模糊 P ID 算法转化 为 可执 行的 C 代码, 并 嵌 入 MFC 编写 的 W in32程序中, 最终实现自适应模糊 P ID 控制器 [ 5] 。
给定一正弦位置信号, 控制液压缸 I做位置闭环, 同时控制液压缸 II做力闭环, 调节控制参数, 确保两 缸可以夹持住试件, 并画出同步位置运动曲线和对顶 力曲线。
当正弦位置信号频率为 0. 5 H z时, 得到两缸位置 跟踪曲线和对顶力曲线, 如图 3、图 4所示; 其中在零 值波动的位置曲线为两缸位置同步误差曲线。
2010年第 6期
液压与气动
1
电液伺服系统同步控制研究
顾 凯, 李长春, 周 欣
Study on synchronization control of electro hydraulic servo system
GU Ka,i L I Chang chun, ZHOU X in
(聊城大学 汽车与交通工程学院, 山东 聊城 252000)
本文以电液伺服阀控非对称缸为研究对象, 对同 步对顶伺服系统进行分析, 建立同步控制系统位置扰 动型力学模型, 提出位置闭环 力跟随控制策略, 通过 试验实现了对试件的同 步夹持, 并 提 出 并 应 用模 糊 P ID 自适 应 控 制 算 法 对 力 闭 环 进 行 校 正, 实 验 证 明, 该算法可以有效减少系统位置扰动, 提高力控 制精度。
中图分类号: TH 137 文献标识码: B 文章编号: 1000 4858( 2010) 06 0001 03
1 引言 随着液压技术在工程领域中的应用日益扩大, 大
型设备负载能力增加或因布局的关系需要多个执行元 件同时驱动一个工作部件, 因此同步控制就显得越来 越重要了。但由于每一个液压系统的泄漏、控制元件 间的性能差异、各执行元件间负载的差异、系统各组成 部分的制造误差等因素的影响 [ 1] , 将造成多执行机构 的同步误差, 如果不有效地加以控制并克服这种同步 误差, 系统将不能正常工作。
参考文献: [ 1] H og an, P. , Burrow s, C. R. , ! Synchronizing U nevenly L oaded
H ydrau lic Cy linders∀, F luid Pow er System and T echno logy [ C] . Proceed ing s of the ASM E Interna tiona lM echan ica l En g ineer ing Congress and Exposition, Ch icago, IL, N ovem ber 6 - 11, 1994, 1: 75- 80. [ 2] 刘长年. 液压伺 服系统 优化设 计理论 [M ]. 北京: 冶金 工业出版社, 1989. 121. [ 3] 李 洪 人. 液压 控 制系 统 [ M ]. 北京: 国防 工 业出 版 社, 1990. 57. [ 4] 刘春芳, 吴 伟. 双电液 伺服 系统 同步 模糊 控制 研究 [ J]. 液压与气动, 2005, ( 9): 19. [ 5] 楼顺天, 等. 基于 M ATLAB 的系 统分 析与设 计 模糊 系统 [M ]. 西 安: 西 安 电 子 科 技 大 学 出 版 社, 2001, 36 - 37.
Q L = K x x - K ppL 其中, K x 和 K p 的零位值可分别写成
Kx =
C dw 2Cdw
1 p s, 零重叠阀
; 1 p s = Q 0, 负重叠阀
Kp =
!3w2r∀2c, 零重叠阀
Cdw ps
1 = Q2p0s, 负重叠阀
其中, Q 0 = 2Cdw
1 ps; rc 为阀芯阀套之间的径向
本文以北京市科委支持项目为背景, 以北京交通 大学液压伺服控制实验室夹持同步控制试验平台的阀 控非对称液压缸为研究对象, 对夹持同步控制进行试 验研究。 2 系统描述
夹持同步控制实验平台为 两个阀控非对 称缸系 统, 系统结构框图如图 1所示。
两个系统共用一个液压泵站, 泵站采用恒压变量 泵, 供油压力为 5 MP a, 同时有冷却器和蓄能器。两缸 均装有位移传感器, 右缸装有力传感器。
通过试验得到自适应调节后的对顶力闭环曲线, 如图 9~ 图 11所示。
图 9 0. 5 H z模糊自适应调节对顶力曲线
图 10 1 H z模糊自适 应调节对顶力曲线
图 11 2 H z模糊自适 应调节对顶力曲线
整理数据得到模糊自适应 P ID控制前后力闭环的 均方差, 如表 1所示。
表 1 模糊自适应 PID调节前后 力闭环均方差
图 3 0. 5 H z位置同步曲线
图 4 0. 5 H z对顶力曲线
改变正弦位置信号频率, 得到 1 H z, 2 H z的位置 跟踪曲线和对顶力曲线, 分别如图 5~ 图 8所示。
图 5 1 H z位置同步曲线
图 6 1 H z对顶力曲线
5 力跟随控制模糊自适应 P ID 校正 位置闭环 力跟随控制的数学模型为一个位置扰
m y + K sy = K sy f + F 其中, K s 为弹性系数, m 为加载对象的折算质量。
液压缸的力方程 F = ApL
其中, A 为活塞有效面积。 液压缸的负载流量方程
QL
=
C tpL +
V 4e
pL
+
Ay
其中, C t 为总泄漏系数, e 为弹性模数。
伺服阀的负载流量方程 [ 3]
系统数字控制器主要由研华工控机 ( IPC610)、研 华数据采集卡 ( PCL - 816)、调理电路组成。控制软件 用 V isual C+ + 6. 0编写。 3 系统建模
如果受力对象是一个位置系统, 它运动与否主要 由本身决定, 施力系统仅仅起着加载作用。这种施力 系统称为位置扰动型施力系统 [ 2 ] 。图 2是对顶同步系 统的原理图, 从图中可以看出, 子系统 I为一个位置系 统。当采用位置闭环 力跟随同步控制策略时, 子系统 II为施力系统。可以看出这是一个标准的位置扰动型 施力系统。
∃n (调节前 ) ∃ c (调节后 )
# = 0. 5 H z 0. 0725 0. 0321
#= 1Hz 0. 1052 0. 0317
#= 2 Hz 0. 0943 0. 0237
由表 1可以看出, 加入自适应模糊 P ID调节后, 力 闭环曲线有了明显的改善, 力闭环的均方差变为原来 的 30% 左右, 证明自适应模糊 P ID 调节有效地减小了 来自子系统 I的位置扰动, 增强了力闭环的控制 精度。 6 结论
缸 I运动的效果。
为了保证液压缸 II夹持试件时速度尽可能慢, 以
使整个过程平稳, 力阶跃响应的超调量尽可能的小, 设
计了从位置闭环切换到力闭环的加载过程, 即检测压
力值小于设定值时为位置控制, 大于设定值时再切换 到力闭环控制, 直至加载稳定。同时为了设备安全, 根 据力传感器量程设计位置保护闭环, 以避免意外产生 两缸对顶失控的情况。
动型的力控模型。压力反馈信号随着子系统 I的位置
2010年第 6期
液压与气动
3
图 7 2 H z位置同步曲线
图 8 2 H z对顶力曲线
变化会在瞬间产生很大的变化, 在力控制的波形中就 会产生如图 4、图 6、图 8所示的 ! 尖峰 ∀。由于子系统 I的位置扰动是随 机的, 如果 P ID 调 节参数 不变, 当 ! 尖峰 ∀出现时, 力闭环调节很难迅速跟踪上力闭环误 差信号的变化。这是我们就需要通过模糊自适应控制 来实时的调整 P ID参数, 减小子系统 I的位置扰动对 子系统 II的影响, 提高力闭环的精度。
式 ∀控制 [ 4] , 位置闭环控制和力闭环控制是位置闭环
力跟随控制策略实现的基础。对于液压缸 II, 力闭环
控制给定一个恒定的压力值, 当液压缸 I向右运动时,
两缸的对顶力增大, 为了保持闭环, 液 压缸 II会自动
向右移动; 反之, 当液压缸 I向左运动时, 两缸的对顶
力减小, 液压缸 II会自动向左移动, 达到 ! 跟随 ∀液压
摘 要: 该文以电液伺服系统的常用执行机构阀控非对称缸为研究对象, 对同步对顶伺服系统进行分析 和试验研究, 建立同步控制系统位置扰动型力学模型, 提出位置闭环 - 力跟随控制策略, 通过试验实现了对 试件的同步夹持, 并提出模糊 P ID自适应控制, 提高了控制精度。
关键词: 阀控非对称缸; 同步控制; 力跟随控制
间隙; ∀为液体黏度; 为预开口量。
联立得到位置扰动型施力机构的力学模型
F ( s) =
AK x Kt
m s+ Ks
1
x
(
s)
+
A K
2 t
syf
(
s)
4
mV eK sK
s3
t
+
m s2 Ks
+
4
V eK
t
+
A2 K sK
t
s+