激光雷达门控控制系统的设计讲解
激光雷达测距系统的设计与实现
激光雷达测距系统的设计与实现随着科技的不断发展和进步,激光雷达测距技术在物联网、自动驾驶、智能机器人等领域的应用越来越广泛。
本文将介绍一种基于激光雷达的测距系统的设计与实现。
一、需求分析设计一个基于激光雷达的测距系统,需要解决以下几个问题:1.测距精度:系统应具备较高的测距精度,以满足各种应用场景的实际需求。
2.扫描角度:激光雷达的扫描范围应能满足应用场景的需求。
同时,扫描角度越大,激光雷达所涉及到的场景就越广泛。
3.响应速度:系统应能够在较短的时间内响应并输出距离数据,以实现实时控制。
二、系统设计1.硬件设计激光雷达测距系统的硬件主要包括激光器、接收器、信号处理器等模块。
激光器:激光雷达使用的是红外激光器,其波长为905nm。
激光器的输出功率一般在几mW到几十mW之间,越高的功率通常意味着更远的测距距离和更高的探测灵敏度。
接收器:接收器主要是将激光雷达反射回来的光信号转换成电信号。
通常采用光电二极管作为接收器,其响应速度可以达到纳秒级。
信号处理器:信号处理器主要是对接收到的信号进行数字信号处理,提取出有用的距离信息并输出到终端设备。
现代激光雷达系统通常使用FPGA或DSP等高性能处理器来完成数字信号处理。
2.软件设计激光雷达测距系统的软件主要包括驱动程序、信号捕获程序、数据处理程序等。
驱动程序:激光雷达测距系统的驱动程序通常基于通用的串行或USB接口协议。
驱动程序主要负责将计算机通过串行或USB接口连接到激光雷达系统并控制其工作。
信号捕获程序:信号捕获程序主要用于捕获激光雷达反射回来的信号,并将其转换成数字信号。
此外,由于激光雷达的工作需要精准的时序控制,因此信号捕获程序还需要精确的时钟同步机制。
数据处理程序:数据处理程序主要用于对采集到的距离信息进行处理,并将处理后的数据输出到终端设备上。
数据处理程序一般分为实时处理和离线处理两种方式。
三、实现过程1.硬件实现我们选用TI公司出品的16位单片机TMS320F28377S来实现激光雷达测距系统硬件设计。
利用激光雷达实现的智能楼宇管理系统
利用激光雷达实现的智能楼宇管理系统近年来,随着科技的飞速发展,智能楼宇的概念逐渐被人们所接受和重视。
利用激光雷达实现的智能楼宇管理系统成为了一项引人注目的新技术。
本文将探讨这一系统的原理、应用和未来发展趋势。
智能楼宇管理系统基于激光雷达技术,通过对楼宇内外环境进行实时监测和数据分析,实现对楼宇设备和能源的高效管理。
激光雷达是一种利用激光束测量距离和产生高质量图像的技术。
在智能楼宇管理系统中,激光雷达主要用于人员定位、室内导航、安全监测等方面。
首先,利用激光雷达实现的人员定位功能对于楼宇管理来说至关重要。
通过激光雷达的高精度测量,系统能够准确记录人员的位置和行为轨迹。
这使得在紧急情况下进行人员疏散成为可能,大大提高了楼宇安全性。
同时,楼宇管理者也可以根据人员流动情况进行楼宇规划和资源分配,提高楼宇的效率。
其次,激光雷达在室内导航方面也有广泛的应用。
通过定位人员的准确位置和楼层信息,系统能够为用户提供室内导航服务,指引用户前往目的地。
这对于一些大型办公楼、商场和机构来说尤为重要。
不仅可以提升用户体验,还可以简化楼宇管理的工作流程。
此外,激光雷达还能够实现楼宇安全监测。
通过对楼宇环境进行实时监测,如火灾和煤气泄漏等危险情况,系统能够迅速发出警报并及时采取应对措施,从而保护楼宇和人员的安全。
这种智能监测系统不仅可以提高楼宇的防灾能力,还能为楼宇管理者提供预警和数据分析的支持。
尽管利用激光雷达实现的智能楼宇管理系统在安全性、导航性和效率方面有着巨大的潜力,但仍存在一些挑战。
首先是激光雷达设备本身的成本较高,这限制了系统的普及和应用范围。
其次,对于复杂的楼宇结构或大型场所,激光雷达可能存在探测盲区,并且难以应对多人同时定位的问题。
此外,系统的数据处理和隐私保护也是需要进一步研究的方向。
未来,随着激光雷达技术的进一步发展和成本的降低,利用激光雷达实现的智能楼宇管理系统将迎来更广阔的应用前景。
同时,结合物联网和人工智能等技术,进一步优化系统的功能和性能也是未来的方向。
基于激光雷达的智能楼宇管理系统
基于激光雷达的智能楼宇管理系统随着科技的不断发展,智能楼宇管理系统逐渐成为现代建筑行业的趋势。
在这个系统中,激光雷达技术扮演着重要的角色。
本文将介绍基于激光雷达的智能楼宇管理系统的原理、应用和未来发展。
一、原理激光雷达是一种使用激光器辐射物体并通过测量反射光来获取目标位置信息的技术。
它能够高精度地获取目标物体的距离和位置等信息。
基于此原理,激光雷达被广泛应用于楼宇管理系统中,用于实时监测和控制楼宇内的各种设备和系统。
二、应用1. 安全管理基于激光雷达的智能楼宇管理系统可以通过实时监测楼宇内的人员和物体的位置信息,快速发现异常情况。
例如,当系统检测到未经授权的人员进入某个区域时,可以立即发出警报并采取预防措施。
这种安全管理方式不仅提高了楼宇的安全性,而且减少了人力监控的成本和工作负担。
2. 能耗管理智能楼宇管理系统基于激光雷达技术可以实时监测楼宇内每个房间的人数和活动情况,并通过调整灯光、空调等设备的工作模式,实现能耗的智能控制。
例如,当系统检测到房间内没有人时,可以自动关闭灯光和空调。
这种智能的能耗管理方式不仅有助于节省能源和降低成本,而且符合环保的理念。
三、未来发展基于激光雷达的智能楼宇管理系统在未来还有许多发展的空间和机会。
1. 人体监测激光雷达技术可以实时监测人体的姿态、动作和心率等信息,并通过数据分析和人工智能算法实现身体健康和运动监测。
这种智能楼宇管理系统可以提供健康管理和预警功能,帮助人们实时掌握自己的身体状况。
2. 空间优化基于激光雷达的智能楼宇管理系统可以通过实时获取楼宇内各个房间的使用情况和人流量等信息,帮助楼宇管理员合理调整楼宇空间的利用。
例如,在某个时间段内,系统可以分析出哪些房间需要增加座位或者减少工作区域,以满足实际需求,并提升工作效率。
3. 智能导航激光雷达技术可以实时获取楼宇内的地理信息,并通过地图导航功能为用户提供准确的室内导航。
这种智能楼宇管理系统可以帮助用户快速找到目的地并避开拥堵区域,提高行动的便捷性。
基于CPLD的激光雷达采集门控系统
基于CPLD的激光雷达采集门控系统文章介绍了一种基于复杂可编程逻辑器件(CPLD)和89S52单片机的激光雷达数据采集门控系统。
该系统采用CPLD构建计数器对激光雷达的开启实现门控,同时采用89C51单片机进行计算、控制和连接外围接口,同时用液晶显示器(LCD)显示目标的大致距离,实现人机交互友好的效果。
标签:复杂可编程逻辑器件单片机门控计数器门控系统是激光雷达系统的一个重要组成部分,高精度的门控可以保证探测精度及观测数据的质量。
在大气遥感激光雷达的光学接收装置中,一般采用的是PMT来接收回波,实现光子计数。
由于雷达回波能量与距离的平方成反比,因此在低空反射的回波能量大,通常会超过PMT的接收阈值。
此时就会使PMT 的响应函数产生畸变,导致接收的数据可信度降低。
所以,设计一个门控系统来控制近距离强回波,限制PMT饱和是十分必要的。
高精度门控系统可以精确控制PMT工作时序,保证了激光雷达系统的探测精度和准确性。
本文介绍的系统主要通过运用VHDL硬件描述语言对CPLD(复杂可编程逻辑器件)进行编程,使其与单片机协调工作,以实现激光雷达门控系统功能,其分辨率达500ns。
具有成本低、精度高的优点。
系统主要功能描述本系统主要完成以下功能:预先估计激光雷达探测目标的距离范围,系统根据目标距离范围计算出门控信号开启和关闭的时间。
系统由激光雷达脉冲触发开始工作,并输出门控信号控制激光雷达接收器,只有当门控信号有效(高电平)时接收器才开始接收回波。
图1是激光脉冲频率为50Hz条件下的工作时序图。
系统方案设计和实现(一)方案设计本设计采用脉冲计数法,对2MHz方波信号进行技术,达到500ns的控制精度。
由单片机构建键盘和LCD显示模块,并由键盘输入探测目标距离最大值和最小值,单片机根据这两个值分别计算出门控开启和关闭时间所对应的计数值,传送给CPLD构成的计数器。
计数器根据两个预置的计数值输出门控信号。
激光雷达探测系统所要求的目标距离范围为0.2-150km,则要求门控关闭时间达1ms,当计数脉冲为2M,计数器最大值至少为2000(二进制12位),故设计一个双预置数16位计数器。
基于激光雷达的警卫系统设计与实现

基于激光雷达的警卫系统设计与实现一、引言随着现代科技的不断进步,智能化安防系统已经成为了保障人们生命财产安全的重要手段之一。
激光雷达作为一种高精度、高效率的传感器,被广泛应用于智能化安防领域中。
本文将介绍基于激光雷达的警卫系统设计与实现。
二、激光雷达的原理与特点1. 激光雷达原理激光雷达利用激光束发射出去,并接收反射回来的信号,通过计算反射信号的时间差和相位差来确定目标物体的距离和位置。
其工作原理类似于声纳和超声波传感器。
2. 激光雷达特点(1)高精度:激光雷达可以实现毫米级别的测距精度。
(2)长寿命:激光器寿命长,可靠性高。
(3)快速测量:激光雷达可以在几微秒内完成一次测量。
(4)适应性强:激光雷达可以适应不同环境下的复杂场景。
三、基于激光雷达的警卫系统设计1. 系统架构基于激光雷达的警卫系统主要由激光雷达、计算机、摄像头和报警器等组成。
其中,激光雷达负责测量周围环境的距离和位置信息,计算机负责处理和分析这些信息,摄像头负责捕捉图像信息,报警器则根据分析结果进行报警。
2. 系统流程(1)激光雷达扫描周围环境,并将测量结果传输给计算机。
(2)计算机对测量结果进行处理和分析,判断是否存在异常情况。
(3)如果存在异常情况,计算机将触发报警器进行报警。
(4)同时,摄像头也会捕捉到异常情况的图像,并将图像传输给计算机。
四、基于激光雷达的警卫系统实现1. 硬件实现硬件方面需要选用高精度、高灵敏度的激光雷达传感器,并配合相应的计算机、摄像头和报警器等设备。
其中,激光雷达可以选择Velodyne HDL-32E或HDL-64E型号。
2. 软件实现软件方面需要编写激光雷达数据采集程序、数据处理程序和报警程序等。
其中,数据采集程序需要实现对激光雷达传感器的控制和数据获取,数据处理程序需要实现对采集到的数据进行滤波、分析和判断,报警程序则需要实现对异常情况的判断和报警。
五、系统优化与改进1. 系统优化(1)提高激光雷达的测量精度和速度。
3D激光雷达系统设计与应用
3D激光雷达系统设计与应用激光雷达是一种高精度、高分辨率的测量工具,被广泛应用于遥感、地质测量、自动驾驶等领域。
随着技术的不断发展,3D 激光雷达系统的设计与应用成为研究的热点。
3D激光雷达系统由激光发射器、接收器、扫描器和数据处理单元等组成。
激光发射器发出的激光束经过扫描器进行水平和垂直扫描,然后被目标物体反射回来,接收器接收到反射回来的激光并转化为电信号。
数据处理单元对接收到的信号进行处理和分析,从而得到目标物体的距离、位置和形状等信息。
3D激光雷达系统的设计需要考虑多个方面的因素。
首先是激光发射器的选择,需要选择合适的激光器类型和参数,以保证发射的激光束具有足够的功率和精度。
其次是扫描器的设计,需要考虑扫描的范围和速度,以及扫描器的机械稳定性和耐用性。
还需要考虑接收器的灵敏度和动态范围,以及数据处理单元的算法和计算能力等。
3D激光雷达系统的应用十分广泛。
在遥感领域,激光雷达可以获取地表的高程和形状信息,用于地形测量和地质勘探。
在自动驾驶领域,激光雷达可以实时获取道路和障碍物的距离和位置信息,用于智能车辆的导航和避障。
在工业制造领域,激光雷达可以用于三维扫描和测量,用于产品质量控制和制造过程的优化。
然而,3D激光雷达系统还存在一些挑战和问题。
首先是成本问题,高精度的激光雷达系统价格昂贵,限制了其在一些应用领域的推广。
其次是数据处理问题,大量的数据需要进行实时处理和分析,对数据处理单元的算法和计算能力提出了更高的要求。
此外,环境干扰也是一个需要解决的问题,例如雨雪天气和强光照射都会对激光雷达的测量精度产生影响。
综上所述,3D激光雷达系统的设计与应用是一个复杂而有挑战性的课题。
随着技术的不断进步和创新,相信激光雷达系统将在更多的领域发挥重要作用,为我们的生活和工作带来更多便利和进步。
基于半导体激光器的激光雷达系统设计与实现
基于半导体激光器的激光雷达系统设计与实现激光雷达系统是一种利用激光束进行距离测量的仪器。
随着半导体激光器技术的不断进步,基于半导体激光器的激光雷达系统的研究和应用越来越广泛。
本文将介绍基于半导体激光器的激光雷达系统的设计和实现。
一、激光雷达系统概述激光雷达系统主要由发射机、接收机、信号处理器和数据处理器等组成。
激光雷达系统最核心的部分是发射器和接收器。
发射器主要由激光器、光学系统和扫描系统等组成,光学系统将激光束聚焦为尽可能小的光斑,并通过扫描系统使激光束沿着扫描区域进行扫描。
接收器主要由接收光电二极管和接收光学系统组成,接收光学系统将接收到的反射光线聚焦到光电二极管的光敏区上,产生电信号。
信号处理器对接收到的电信号进行滤波、放大和数字化处理,将信号传输到数据处理器进行分析和处理。
二、基于半导体激光器的激光雷达系统设计基于半导体激光器的激光雷达系统的设计首先需要确定激光器的参数和特性。
半导体激光器具有体积小、重量轻、寿命长、能耗低、调制速度快等优点,因此在激光雷达系统中应用广泛。
在激光器的设计过程中,需要考虑到激光器的波长、功率、光斑大小、光束发散角度、调制速度等参数。
根据应用需求选择合适的激光器。
接下来需要设计激光雷达系统的光学系统。
光学系统主要包括聚焦透镜、扫描镜和光学滤波器等部分。
聚焦透镜的作用是将激光束聚焦为尽可能小的光斑,扫描镜的作用是控制激光束扫描区域,光学滤波器的作用是滤除掉不需要的光线。
在光学系统的设计过程中需要考虑到对系统的误差修正和稳定性的保证。
同时还需要确定光学系统的参数,如数值孔径、焦距等。
三、基于半导体激光器的激光雷达系统实现基于半导体激光器的激光雷达系统实现需要涉及到硬件设计和软件开发等方面。
在硬件设计方面,需要选择合适的激光器、光电二极管、光学器件和信号处理器等部件,并进行适当的组合和调试。
在软件开发方面,需要开发激光雷达系统的控制程序和数据处理程序,并与硬件进行连接和测试。
激光设备电气控制系统介绍讲解课件

稳定性
稳定性是指激光设备电气控制系统在长时间运行过程中保持稳定的能力。该系统 采用了先进的控制算法和优化设计,确保了在各种复杂环境条件下都能够稳定运 行。
稳定性还体现在其对外部干扰的抑制能力。在生产过程中,各种外部因素可能会 对设备产生干扰,而该系统能够有效地抑制这些干扰,确保设备的正常运行。
安全性
液压元件
如液压缸、液压阀等,在需要大功率驱动时使用,提高执行机构的 刚性和精度。
传感器及检测系统
位置传感器
检测执行机构的位移和位置, 实现位置闭环控制。
速度传感器
检测执行机构的转速和速度, 实现速度闭环控制。
激光功率传感器
检测激光器的输出功率,确保 激光加工的质量和效果。
安全传感器
用于设备安全防护,如光幕传 感器、压力传感器等,防止设 备在运行过程中出现危险情况
安全性是指激光设备电气控制系统具有完善的安全保护功能。该系统采用了多重安全保护机制,确保 了设备和人员的安全。
安全性还体现在其符合各种安全标准和规范的能力。在设计和制造过程中,该系统严格遵守了各种国 家和国际安全标准,从而确保了设备和人员的安全。
智能性
智能性是指激光设备电气控制系统具有高度智能化的特点。该系统采用了先进的控制算法和人工智能技术,能够自动适应各 种复杂环境条件下的工作需求。
激光设备电气控制系统介绍 讲解课件
• 激光设备概述 • 激光设备电气控制系统基本组成 • 激光设备电气控制系统工作原理 • 激光设备电气控制系统特点与优势
• 激光设备电气控制系统未来发展趋 势与挑战
• 激光设备电气控制系统案例分析
01
激光设备概述
激光设备的定义与分类
激光设备的定义
激光设备是一种能够产生激光束的装 置,它利用受激辐射产生高能量密度 的光束,具有高亮度、单色性好、方 向性强等优点。
激光雷达视场范围测量系统设计原理
激光雷达视场范围测量系统设计原理激光雷达视场范围测量系统设计原理激光雷达视场范围测量系统是一种基于激光技术的测量设备,可以用来确定目标物体在地面上的距离和位置。
它主要由激光发射器、接收器、扫描机构和数据处理单元组成。
下面将一步步介绍激光雷达视场范围测量系统的设计原理。
第一步,激光发射器。
该系统中的激光发射器是整个测量系统的核心部分。
它通过发射激光束来照射目标物体,并记录激光束的发射时刻。
激光发射器通常采用半导体激光二极管,可以在短时间内发出高强度、窄束的激光。
第二步,扫描机构。
激光雷达视场范围测量系统需要扫描整个视场范围内的目标物体。
为了实现这一目标,系统通常配备了一个旋转或摆动的扫描机构,它可以将激光束在视场范围内进行快速而准确的扫描。
扫描机构可以使用电动机驱动或者微机械系统实现。
第三步,激光接收器。
激光接收器用于接收从目标物体反射回来的激光束,并记录接收到激光束的时间。
接收机通常配备高灵敏度的光电二极管或光敏电阻,它们可以将光信号转换为电信号,并传递给数据处理单元进行处理。
第四步,数据处理单元。
数据处理单元是激光雷达视场范围测量系统的核心控制部分。
它通过计算激光发射和接收的时间差,并结合已知的激光速度,可以计算出目标物体与激光雷达的距离。
同时,数据处理单元还可以根据扫描机构的位置和角度信息,确定目标物体在地面上的位置坐标。
综上所述,激光雷达视场范围测量系统的设计原理主要包括激光发射器、扫描机构、激光接收器和数据处理单元。
它通过发射激光束、接收反射的激光束,并计算时间差和角度信息,可以确定目标物体的距离和位置坐标。
这种系统在无人驾驶、机器人导航等领域具有广泛的应用前景。
基于激光雷达的智能安全门技术
基于激光雷达的智能安全门技术智能安全门已经成为现代社会安全管理的重要组成部分。
它利用先进的技术手段,如基于激光雷达的技术,为人们提供了更安全、便捷的通行体验。
本文将围绕基于激光雷达的智能安全门技术展开讨论,从其工作原理、应用场景以及未来发展等方面,深入探究这项技术的优势和前景。
激光雷达作为一种高精度距离测量仪器,常用于自动驾驶、环境感知等领域。
而在智能安全门技术中,激光雷达的应用不仅提供了准确的人体检测能力,还能够实现有效的远程控制和自动化管理。
其工作原理基于利用激光脉冲测量物体的距离,结合闪光灯和红外线传感器等装置,实现对通行者的快速识别和追踪。
通过精准的距离测量,激光雷达能够避免误判和漏检的问题,提高了安全门的准确性和可靠性。
基于激光雷达的智能安全门技术具有广泛的应用场景。
首先,它可以广泛应用于公共场所,如地铁站、机场、购物中心等,用于快速安检和人流管理。
通过激光雷达的远程控制和自动化识别,智能安全门能够快速识别不携带危险物品的人员,大幅提升安全检查的效率。
其次,基于激光雷达的技术还可以应用于住宅小区和商业办公楼等私人场所,用于门禁管理和安全防护。
相比传统的门禁系统,智能安全门能够更准确地判断人员身份,并实现无感通行,为用户提供更便捷的生活体验。
此外,基于激光雷达的技术还可以应用于物流仓储行业,实现对货物的快速扫描和识别,提高物流管理的效率和安全性。
基于激光雷达的智能安全门技术在未来的发展前景也十分广阔。
首先,随着激光雷达技术的不断创新和进步,其精度和稳定性将得到进一步提升,使智能安全门能够更加准确地判断人员和物品。
其次,随着智能空间和物联网技术的普及,智能安全门可以与其他智能设备进行联动,实现更高层次的安全防护。
比如,智能安全门可以与视频监控系统、人脸识别系统等设备相连接,形成一个完整的智能安防系统,为人们提供更全面的安全保障。
此外,基于激光雷达的智能安全门技术还可以与人工智能、大数据等技术相结合,实现更智能、更高效的安全管理。
《激光雷达智能综合控制系统的设计与实现》
《激光雷达智能综合控制系统的设计与实现》一、引言随着科技的飞速发展,激光雷达技术逐渐成为智能交通、无人驾驶、机器人等领域的重要技术之一。
激光雷达智能综合控制系统作为激光雷达技术的核心组成部分,其设计与实现对于提高系统性能、保障安全、优化用户体验具有重要意义。
本文将详细介绍激光雷达智能综合控制系统的设计与实现过程,为相关领域的科研工作者和实践者提供参考。
二、系统需求分析首先,对激光雷达智能综合控制系统的需求进行分析。
系统需满足高精度、高稳定性、实时性等要求,同时需具备自动控制、远程控制、故障自诊断等功能。
针对不同应用场景,系统还需具备适应性强的特点,以满足复杂多变的实际需求。
三、系统设计(一)硬件设计激光雷达智能综合控制系统的硬件设计主要包括激光雷达模块、控制器模块、通信模块等。
其中,激光雷达模块负责感知周围环境信息,控制器模块负责处理感知信息并发出控制指令,通信模块负责与上位机或其他设备进行数据传输。
硬件设计需考虑各模块的兼容性、稳定性及功耗等因素。
(二)软件设计软件设计包括操作系统设计、算法设计等。
操作系统需具备实时性、稳定性等特点,支持多任务处理。
算法设计包括数据采集、数据处理、路径规划、避障算法等,需保证系统的高精度、高稳定性及实时性。
四、系统实现(一)开发环境搭建根据系统需求及设计,搭建相应的开发环境。
包括硬件设备的选型与采购、软件开发环境的搭建等。
(二)编程实现根据软件设计,进行编程实现。
包括操作系统开发、算法实现等。
在编程过程中,需注意代码的可读性、可维护性及效率。
(三)系统调试与优化完成编程后,进行系统调试与优化。
包括硬件设备的调试、软件算法的测试与优化等。
确保系统性能达到预期要求。
五、系统测试与评估(一)测试环境搭建为验证系统的性能及稳定性,搭建相应的测试环境。
包括模拟实际场景的测试环境、实际场景的测试等。
(二)测试方法与步骤根据测试环境,制定相应的测试方法与步骤。
包括对系统各项功能的测试、性能测试、稳定性测试等。
室内激光雷达导航系统设计_史风栋

第44卷第12期红外与激光工程2015年12月Vol.44No.12Infrared and Laser Engineering Dec.2015室内激光雷达导航系统设计史风栋1,刘文皓2,汪鑫3,丁娟2,史屹君2,修春波1(1.天津工业大学工程教学实习训练中心,天津300387;2.天津中环创新科技有限公司,天津300190;3.天津津航技术物理研究所,天津300308)摘要:小型无人机和移动机器人技术迅速发展,对室内导航技术的要求越来越高,针对当前室内导航精度不高、导航设备比较复杂的问题,提出一种采用激光雷达定位和地磁传感器检测相结合的室内主动导航方法。
该方法首先使用激光雷达扫描室内环境,用采集到的数据拟合出室内地图,根据目的地信息和室内的环境信息来规划行进的路线;然后在行进中使用激光雷达连续地扫描得到数据与地图数据进行比较,来确定所处的位置,同时使用地磁传感器取得行驶的方向,二者相结合判断是否在规划的路线上行驶,及时地对出现的偏差进行纠正;最后通过搜索RFID地标确定是否已经到达指定位置。
仿真和实验的结果表明:所设计的室内激光雷达导航系统结构简单、可靠性高,能够较好地满足室内导航的要求。
关键词:激光雷达;室内导航;地磁传感器;RFID中图分类号:TP23文献标志码:A文章编号:1007-2276(2015)12-3570-06Design of indoor laser radar navigation systemShi Fengdong1,Liu Wenhao2,Wang Xin3,Ding Juan2,Shi Yijun2,Xiu Chunbo1(1.Engineering Teaching Training Center,Tianjin Polytechnic University,Tianjin300387,China;2.Tianjin Zhonghuan Innovation Science and Technology Co.,LTD,Tianjin300190,China;3.Tianjin Jinhang Institute of Technical Physics,Tianjin300308,China)Abstract:With the rapid development of micro aerial vehicle technology and mobile robots technology, the requirements for indoor navigation technology are becoming higher and higher,but navigation presence is low and equipment is relatively complex in indoor navigation system.To address this problem,an indoor active navigation method that combines laser radar positioning and geomagnetic sensors measurement was proposed.First,laser radar was used to scan the indoor environment,the map be constructed by collected data,the route be planed based on the destination information and the indoor environment information;and then the data which was obtained by laser radar continuously scanning environment was compared with the map data when the vehicle was traveling,the location was determined,direction of travel was obtained by geomagnetic sensor,whether the vehicle was on the right road was determined by the combination of position and direction of travel,the deviation will be corrected in time;last,whether arriving at designated location was determined by searching RFID收稿日期:2015-04-05;修订日期:2015-05-03基金项目:国家自然科学基金(6120330);天津市应用基础与前沿计划(14JCYBJC18900)作者简介:史风栋(1977-),男,工程师,硕士,主要从事自动控制及流量检测方面的研究。
室内激光雷达导航系统设计
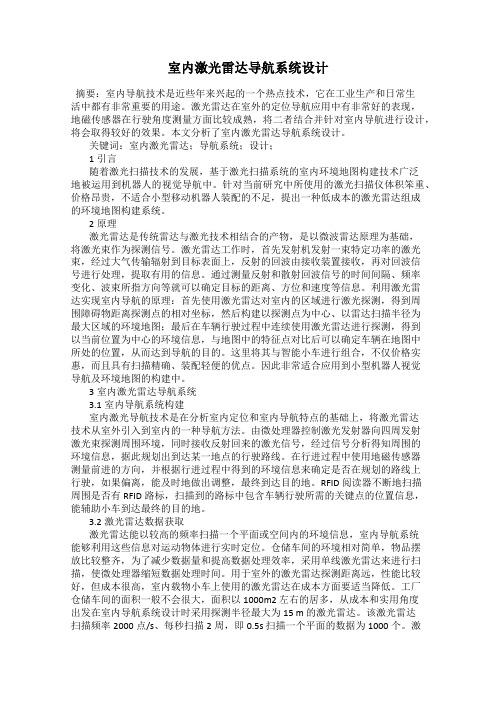
室内激光雷达导航系统设计摘要:室内导航技术是近些年来兴起的一个热点技术,它在工业生产和日常生活中都有非常重要的用途。
激光雷达在室外的定位导航应用中有非常好的表现,地磁传感器在行驶角度测量方面比较成熟,将二者结合并针对室内导航进行设计,将会取得较好的效果。
本文分析了室内激光雷达导航系统设计。
关键词:室内激光雷达;导航系统;设计;1引言随着激光扫描技术的发展,基于激光扫描系统的室内环境地图构建技术广泛地被运用到机器人的视觉导航中。
针对当前研究中所使用的激光扫描仪体积笨重、价格昂贵,不适合小型移动机器人装配的不足,提出一种低成本的激光雷达组成的环境地图构建系统。
2原理激光雷达是传统雷达与激光技术相结合的产物,是以微波雷达原理为基础,将激光束作为探测信号。
激光雷达工作时,首先发射机发射一束特定功率的激光束,经过大气传输辐射到目标表面上,反射的回波由接收装置接收,再对回波信号进行处理,提取有用的信息。
通过测量反射和散射回波信号的时间间隔、频率变化、波束所指方向等就可以确定目标的距离、方位和速度等信息。
利用激光雷达实现室内导航的原理:首先使用激光雷达对室内的区域进行激光探测,得到周围障碍物距离探测点的相对坐标,然后构建以探测点为中心、以雷达扫描半径为最大区域的环境地图;最后在车辆行驶过程中连续使用激光雷达进行探测,得到以当前位置为中心的环境信息,与地图中的特征点对比后可以确定车辆在地图中所处的位置,从而达到导航的目的。
这里将其与智能小车进行组合,不仅价格实惠,而且具有扫描精确、装配轻便的优点。
因此非常适合应用到小型机器人视觉导航及环境地图的构建中。
3室内激光雷达导航系统3.1室内导航系统构建室内激光导航技术是在分析室内定位和室内导航特点的基础上,将激光雷达技术从室外引入到室内的一种导航方法。
由微处理器控制激光发射器向四周发射激光束探测周围环境,同时接收反射回来的激光信号,经过信号分析得知周围的环境信息,据此规划出到达某一地点的行驶路线。
基于激光雷达避障的机器人控制系统设计
为了保证系统的实时性 ,简化控制系统软件的设 计 ,有必要在控制系统引入嵌入式操作系统[2] 。本设计 将嵌入式技术与机器人技术相结合 ,利用 A RM 作为硬 件平台并移入μC/ OS2 Ⅱ嵌入式实时操作系统 ,开发了 具有多线程 、多任务管理的控制终端 。嵌入式主控制器 A RM 是整个机器人控制系统的核心 ,主要完成环境感 知 、组织管理 、总体任务分配 。嵌入式主控器作为机器 人的运算层 ,一方面作为控制上位机 ,可以通过串口与
激光雷达是一种工作在从红外线到紫外光谱段的 雷达系统 ,相对于超声波 、红外 、摄像头等其他传感测距 方法 ,激光雷达具有探测距离远 ,测量精度高 ,价格相对 适中 等 优 点[4] 。在 本 设 计 中 使 用 德 国 施 克 公 司 的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光雷达门控控制系统的设计
前言激光雷达能够对大气中的气溶胶、二氧化碳、臭氧、水气等进行高时空分辨率、实时、大范围地测量,因此越来越受到环保和气象部门的重视。
目前,用于气象要素和环境污染检测的激光雷达技术发展很快。
激光雷达必定会在大气参数和环境污染检测方面扮演重要的角色。
要使激光雷达的测量范围尽可能的大,必须控制好雷达光电倍增管(PMT)门控的开关门时间,以满足各种测量的要求.如果能很好地解决这些问题将会极大地推动激光雷达的应用
前言
激光雷达能够对大气中的气溶胶、二氧化碳、臭氧、水气等进行高时空分辨率、实时、大范围地测量,因此越来越受到环保和气象部门的重视。
目前,用于气象要素和环境污染检测的激光雷达技术发展很快。
激光雷达必定会在大气参数和环境污染检测方面扮演重要的角色。
要使激光雷达的测量范围尽可能的大,必须控制好雷达光电倍增管(PMT)门控的开关门时间,以满足各种测量的要求.如果能很好地解决这些问题将会极大地推动激光雷达的应用和推广。
单片机在很多领域都有广泛的应用,其性价比很高,特别适合于激光雷达门控控制系统的要求。
我们利用单片机很好地实现了激光雷达光电倍增管门控开关门的控制,并通过上位机编程实现了软件控制门控,操作极为方便,使激光雷达的发展更加趋向于自动化。
1.控制方案设计
激光雷达接收的后向散射回波信号通过 PMT接收,由于近地面的回波信号很强,而 PMT是非常灵敏的器件,如果直接用激光器的出光信号 QSWITCH信号触发 PMT接收回波就会对PMT造成损害。
常闭型 PMT的 GATE端是上升沿触发开门,所以我们将 QSWITCH信号延时整形后得到一个正脉冲,脉冲的前沿触发 PMT开门,脉冲的宽度就是 PMT开门的时间。
常开型 PMT的 GATE端是下降沿触发关门,所以我们先将激光器的氙灯信号FLASHLAMP延时一段时间,得到一个正脉冲,脉冲的前沿调节在QSWITCH信号之前,这个时候 PMT就关门了,直到脉冲的后沿才触发 PMT开门,在这之后PMT就一直开门。
通过单片机控制单稳态触发器的延时时间,并用上位机进行软件控制,实现了精确延时,调节非常方便。
本系统以单片机为核心,按照规定的协议,上位机通过串口给单片机发送相应的指令,单片机再调节单稳态触发器中的数字电位器的值,从而输出相应的延时脉冲到光电倍增管门控,实现开门或者关门。
系统功能框图如图1:
2.系统硬件设计本系统采用 AT89S52单片机作为控制核心,控制系统主要包括数字电位器、光电耦合器、单稳态触发器、信号放大整形电路、以及串口通
信电路等部件。
2.1 单片机
AT89S52是一个低功耗,高性能 CMOS 8位单片机,片内含 8k Bytes ISP(In-system programmable)的可反复擦写 1000次的 Flash只读程序存储器, 256 bytes的随机存取数据存储器( RAM),器件采用 ATMEL公司的高密度、非易失性存储技术制造,兼容标准MCS-51指令系统及51系列单片机引脚结构,芯片内集成了通用8位中央处理器和ISP Flash存储单元,可为许多嵌入式控制应用系统提供高性价比的解决方案。