计算机控制技术课件+于海生
《微型计算机控制技术》于海生_清华社_第1章

R/ C ×
12/ 8 ×
A0 ×
工作状态 禁止
×
×
1 1 1 1 1
1
0 0 0 0 0
×
0 0 1 1 1
×
× × 接+5V 接地 接地
×
0 1 × 0 1
禁止
启动12位转换 启动8位转换 12位并行输出有效 高8位并行输出有效 低4位加上尾随4个0有效
AD574A/1674 逻辑真值表
国家精品课程《计算机控制技术》
译码电路不仅与地址信号有关,而且与控制信号有关。 其中,ISA总线中,使用A0~A9 、IOW、IOR 等信号组合。
国家精品课程《计算机控制技术》
2.I/O端口地址译码方法及电路形式 (1)固定地址译码
国家精品课程《计算机控制技术》
(2)开关选择译码
国家精品课程《计算机控制技术》
2.1.3 基于ISA总线端口扩展
国家精品课程《计算机控制技术》
2.5 硬件抗干扰技术
2.5.1 过程通道抗干扰技术 2.5.2 CPU抗干扰技术 2.5.3 系统供电与接地技术
国家精品课程《计算机控制技术》
干扰:就是有用信号以外的噪声或造成计算机设备不能正常工作的 破坏因素。 克服干扰的措施:硬件措施,软件措施,软硬结合的措施 干扰的来源:外部干扰和内部干扰。 外部干扰:主要是空间电或磁的影响,环境温度、湿度等气象 条件。 内部干扰:主要是分布电容、分布电感引起的耦合感应,电磁 场辐射感应,长线传输的波反射,多点接地造成的电位差引起的 干扰,寄生振荡引起的干扰,甚至元器件产生的噪声。 分布电容:除电容器外,由于电路的分布特点而具有的电容 叫分布电容。 分布电感:由于导线布线和元器件的分布而存在的电感叫分 布电感 。 根据电感器的频率特性,由于分布电感的数值一般不大,在低频
课件:4.3 常规及复杂控制技术(三)
ω=2π/T)。
5.PID控制参数的自整定法
被控对象大多用近似一阶惯性加纯滞后环节来表示,
其传递函数为
Gc
(
s
)
Ke 1 T
s
s
对于典型PID控制器
1 D( s ) KP(1 TI s TDs )
有Ziegler-Nichols整定公式
K
P
1.2T Kτ
Δu(k)= KP[2.45e(k)-3.5e(k-1)+1.25e(k-2)] 这样,整个问题便简化为只要整定一个参数KP。 改变KP,观察控制效果,直到满意为止。 该法为实现简易的自整定控制带来方便。
3.优选法
优选法是经验法的一种。 具体作法:根据经验,先把其它参数固定,然后用 0.618法(黄金分割法)对其中某一参数进行优选,待选出 最佳参数后,再换另一个参数进行优选,直到把所有的参 数优选完毕为止。 最后根据T、KP、TI、TD诸参数优选的结果取一组最佳 值即可。
① 给定值的变化频率越高,采样频率就应越高。 ② 被控对象是快速变化的,采样周期应小。 ③ 执行机构的惯性大,采样周期应大。 ④ 控制算法的类型:T太小会使得PID算法的微分积分作 用不明显;控制算法也需要计算时间。 ⑤ 控制的回路数:
n
T Tj
j 1
Tj 指第j回路控制程序执行时间和输入输出时间。
2.按简易工程法整定PID参数
(1)扩充临界比例度法
① 选择一个足够短的采样周期,采样周期为被控对象纯 滞后时间的十分之一以下。
② 用选定的采样周期使系统工作。这时,数字控制器去 掉积分作用和微分作用,只保留比例作用。然后逐渐减小比 例度δ(δ=1/KP),直到系统发生持续等幅振荡。记下使系 统发生振荡的临界比例度δk及系统的临界振荡周期Tk。
《计算机控制技术》课件

主题二:传感器与执行器
传感器的作用和种类
探索传感器的工作原理和不同应 用领域,了解它们在自动化系统 中的重要性。
执行器的作用和种类
学习执行器的工作方式和不同类 型,了解它们在实际机械系统中 的应用。
传感器与执行器的应用
深入研究传感器与执行器在实际 工程中的具体应用案例,探索其 优势和限制。
主题三:控制系统的设计与实施
ቤተ መጻሕፍቲ ባይዱ
《计算机控制技术》PPT 课件
欢迎来到《计算机控制技术》课程的世界!本课程将向您介绍计算机控制系 统的基础知识、传感器与执行器的应用、以及控制系统的设计与实施。让我 们一起探索这个令人着迷的领域吧!
课程内容概述
主题一:控制系统基础知识
深入了解控制系统的定义、组成和分类,以及控制系统的性能指标。
主题二:传感器与执行器
探索各种传感器和执行器的作用、种类,以及它们在实际应用中的重要性。
主题三:控制系统的设计与实施
学习控制系统设计的步骤、实施的关键要点,以及如何进行调试与优化。
课程目标和重要性
1 深入理解控制系统
通过学习本课程,您将全 面了解计算机控制系统的 概念和原理。
2 掌握传感器与执行器
的应用
学习不同传感器和执行器 的使用方式,为实际工程 提供解决方案。
3 控制系统的设计与实
施能力
掌握控制系统的设计步骤 和调试方法,提高工程实 施的效率和质量。
主题一:控制系统基础知识
1
什么是控制系统
了解控制系统的概念和功能,探索其在自动化领域中的应用。
2
控制系统的组成和分类
学习控制系统的结构和分类方式,了解不同类型的系统。
3
控制系统的性能指标
微型计算机控制技术(于海生版)课后答案 ppt课件

曲线 。
ppt课件
26
解:首先求取广义对象的脉冲传递函数
1 es G(s) H (s)Gc (s) s3
滞后一个周期
G(z) Z[G(s)]
单位圆上零点
0.5z1(1 z1 ) (1 z1 )2
单位圆上极点
ppt课件
27
单位速度输入信号,设计最少拍无纹波控制器
e (z) (1 z1 )2 1 a0z1
ppt课件
24
Y (z) (z)R(z) z1 z2 z3 z4 L
E(z) e (z)R(z) 1 U(z) D(z)E(z) 0.111z1 0.01233z2 0.001368z3 L
求输出响应y(k)、控制信号u(k)、误差序列e(k) y(0) 0, y(1) y(2) L 1 u(0) 0.111, u(1) 0.01233, u(3) 0.002368, u(4) L e(0) 1,e(1) e(2) e(3) L 0
按极点配置方法设计状态反馈控制规律l使闭环系统的极点配置在z平面1208025101010102可控性分析1208025000368006320003680007670063200233fgrankw且f非奇异状态完全可控因此可任意配置闭环极点3极点配置比较系数可得080251607025006320003681368036800026400632162462162462162462在第2题中进行全状态直接反馈但只有测到一个状态变量现设计一个状态观测器预报观测器极点配置在试求观测器的增益矩阵
位置型
uk 1.3ek 0.6ek 1 0.3uk 1
ppt课件
《计算机控制技术》课件

contents
目录
• 计算机控制技术概述 • 计算机控制系统组成 • 计算机控制系统的基本原理 • 计算机控制系统的设计方法 • 计算机控制系统的实现技术 • 计算机控制系统的应用实例
01
计算机控制技术概述
定义与特点
总结词
计算机控制技术的定义和特点
详细描述
计算机控制技术是指利用计算机对工业生产过程进行自动控制的技术。它具有 高精度、高效率、高可靠性的特点,能够实现生产过程的自动化、智能化和信 息化。
动控制。
监控软件
用于实时监控系统的运行状态 ,显示各种参数和数据,以及
进行故障诊断和报警等。
数据库软件
用于存储和管理各种数据,如 历史数据、实时数据等。
操作系统
提供计算机控制系统的运行环 境和基础服务。
人机接口
01
02
03
界面设计
设计易于操作的人机界面 ,包括图形界面和文本界 面等。
交互方式
提供多种交互方式,如鼠 标操作、键盘输入等,方 便用户进行操作和控制。
常见的开环控制系统有步进电机 控制系统、温度控制系统等。
闭环控制系统
闭环控制系统是一种包含反馈环节的控制系统,通过检测系统输出结果,将检测结 果反馈给输入端,与输入信号进行比较,根据比较结果调整输入信号。
闭环控制系统的优点是能够实时调整系统输出,提高控制精度和稳定性,但结构相 对复杂。
常见的闭环控制系统有伺服电机控制系统、数控机床控制系统等。
自适应控制
通过调整控制器参数,使系统能够自动适应环境变化和不确定性, 保持最优性能。
鲁棒控制
设计具有鲁棒性的控制系统,使系统在存在不确定性和干扰的情况 下仍能保持稳定和良好的性能。
计算机控制技术课件+于海生
n i i 1 n
得
2
Z[ y(k 2) 1.5 y(k 1) 0.5 y(k )] 0
2 1
z [Y ( z) y(T ) z y(2T ) z ] 1.5z [Y ( z) zy(T )] 0.5Y ( z) 0
于海生计算机课件计算机基础课件计算机网络基础课件计算机图形学课件计算机网络课件计算机应用基础课件计算机病毒课件计算机的组成课件小学计算机课件
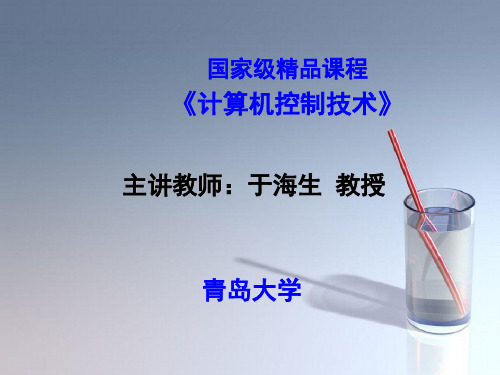
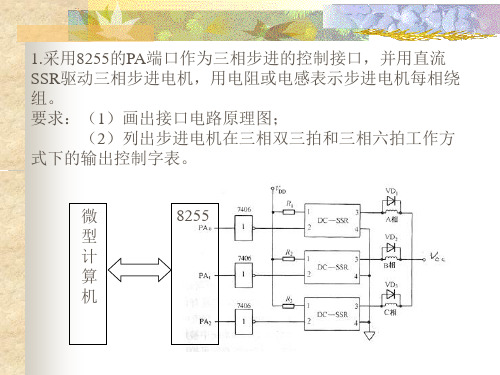
1.采用8255的PA端口作为三相步进的控制接口,并用直流 SSR驱动三相步进电机,用电阻或电感表示步进电机每相绕 组。 要求:(1)画出接口电路原理图; (2)列出步进电机在三相双三拍和三相六拍工作方 式下的输出控制字表。 微 型 计 算 机
s
U ( z) 2.7 z 0.7 2.7 0.7 z 1 D( z ) E ( z ) 1.85 z 0.15 1.85 0.15 z 1
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z )
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z ) 1.85U ( z ) 0.15 z 1U ( z ) 2.7 E ( z ) 0.7 z 1 E ( z )
1 e ( z ) 1 ( z ) [ (1 ai z 1 )](1 z 1 ) q F1 ( z ) (1 z )
v j i 1
1 ( z ) z d [ (1 bi z 1 )]F2 ( z ) f 21 z
u
ቤተ መጻሕፍቲ ባይዱ
《微型计算机控制技术》于海生第1章PPT课件

2)其它性能: 并行操作、地址/数据线复用、支持64位寻址等。
计算机控制技术
3)PCI总线信号定 义
主控设备49条,目标设 备47条,可选引脚 51条 (主要用于64位扩展、中断 请求、高速缓存支持等), 总引脚数 120条(包含电源、 地、保留引脚等)。
计算机控制技术
2 外部总线
1)RS-232串行通信总线
引脚号 1 2 3 4 5 6 7 8 9 10 11 12 13
功能 保护地 发送数据 接收数据 请求发送(RTS) 允许发送(CTS,或清除发送) 数传机(DCE)准备好 信号地(公共回线) 接收线信号检测 (保留供数传机测试) (保留供数传机测试) 未定义 (辅信道)接收线信号检测 (辅信道)允许发送(CTS)
引脚号 14 15 16 17 18 19 20 21 22 23 24 25
功能 (辅信道)发送数据 发送信号无定时(DCE为源) (辅信道)接收数据 接收信号无定时(DCE为源)
未定义 (辅信道)请求发送(RTS)
数据终端准备好 信号质量检测 振铃指示
数据信号速率选择(DTE/DCE为源) 发送信号无定时(DTE为源) 未定义
给定
输入 通道
计算机
输出通道 D/A
被控量 对象
y
输入通道 A/D
计算机控制技术
2. 在线方式和离线方式
在线方式(on-line): 生产过程和计算机直接连接,并受计 算机控制的方式称为在线方式或联机方式。
离线方式(off-line): 生产过程不和计算机相连,且不受计 算机控制,而是靠人进行联系并做相应操作的方式称为离线方 式或脱机方式。
微型计算机控制技术于海生

yR y x xR
如果在校准时,计算并存放 yR / xR 的值,则测量 校准时,只需行一次乘法即可。有时也可用yi代替yR 人工自动校准特别适于传感器特性随时间会发生 变化的场合。如常用的湿敏电容等湿度传感器。
6.1.3 高级语言I/O控制台编程
对于PC总线工业控制机,我们以Turbo C为例来说明其访问I/O端口 的编程。 Turbo C通常有库函数,允许直接访问I/O端口,头文件〈conio.h〉 中定义了I/O端口例程。 例如: a=inportw(0x210) b=inportb(0x220) 第一条指令表示将端口210H的16位二进制数(一个字)输入给变量a, 第二条指令表示将端口220H的8位二进制数(一个字节)输入给变量b。在 C语言中,0x起头的是16进制数。 又如: outportw(0x230,0x3435) outportb(0x240,0x26) 第一条指令表示将二字节数3435H输出到端口230H中,第二条指令 表示将单字节数26H输出到端口240H中。
6.2.1
误差自动校准
系统误差定义:是指在相同条件下,经过多次测量,误差的 数值(包括大小符号)保持恒定,或按某种已知的规律变化的 误差。 特点:在一定的测量条件下,其变化规律是可以掌握的, 产生误差的原因一般也是知道的。 方法:偏移校准在实际中应用最多,并且常采用程序来 实现,称为数字调零。 数字调零:在测量时,先把多路输入接到所需测量的一 组输入电压上进行测量,测出这时的输入值为x1,然后把多路 开关的输入接地,测出零输入时A/D转换器的输出为x0,用x1 减去x0即为实际输入电压x。图6-3 除了数字调零外,还可以采用偏移和增益误差的自动校 准。
《微型计算机控制技术》于海生第2章

硬件设计: 输入输出接口与过程通道设计
接口:接口是计算机与外部设备(部件与部件之间)交换 信息的桥梁,它包括输入接口和输出接口。
接口技术:接口技术是研究计算机与外部设备之间如何交 换信息的技术。
过程通道:过程通道是在计算机和生产过程之间设置的信 息传送和转换的连接通道,它包括模拟量输入通道、模拟量 输出通道、数字量(开关量)输入通道、数字量(开关量)输出通 道。 AI/AO、DI/DO.
2.1 总线扩展技术
2.1.1 微型计算机系统I/O端口与地址分配
1.I/O端口及I/O操作 (1)数据端口(data port):CPU与外设之间数据缓冲。 (2)状态端口(state port):外设状态,ready ; busy;
error等。 (3)命令端口(command port):命令字、控制字。
板卡地址:03ExH
A3 A2 A1 A0 端口地址 0 0 0 X(NA) 03E0H Y0 0 0 1 X 03E2H Y1 …… 1 1 1 X 03EEH Y7
2.1.3 基于ISA总线端口扩展
1.板选译码与板内译码 2.总线驱动及逻辑控制 3.端口及其读写控制
2.2 数字量输入输出接口与过程通道
2. I/O端口编址方式 (1)统一编址(M map I/O):I/O端口与存储单元统一编址。 优点指令集无需I/O指令;缺点地址长、译码复杂,速度慢。 (2)独立编址(I/O map):单独I/O编址,专门I/O指令。 优点指令长度短,译码简单,速度快;缺点功能不强。
2.1.2 I/O端口地址译码技术
AD526可以在透明与锁存两种模式下工作。(P36表2-2状态表) 透明模式是13脚CLK端接地。 锁存模式是CLK内逻辑信号提供。
计算机控制技术课件

第0章 课程简介
本课程所涵盖的相关基础知识(1) 本课程所涵盖的相关基础知识(1)
计算机技术
(包括硬件,软件,网络,通讯等) 包括硬件,软件,网络,通讯等)
自动控制理论
(包括系统建模,控制理论,仿真等) 包括系统建模,控制理论,仿真等)
检测技术及仪表 工程技术
2010-1-4 计算机控制技术 9
第0章 课程简介
作业要求
作业应独立完成,发现抄袭作业计0分 作业应独立完成, 发现抄袭作业计 分, 作业通过email( anshiqi@) 作业通过 ( ) 所有作业必须采用word文件格式 , 并压 文件格式, 交 , 所有作业必须采用 文件格式 推荐用winRAR),文件名由以下几部分 缩(推荐用 ) 组成:学号-姓名 作业次数. 姓名-作业次数 组成:学号 姓名 作业次数.平时成绩占总成 绩的30%(包括作业,考勤,测验,课堂提问 绩的 (包括作业,考勤,测验, 等).
–积极主动地学习 –一方面虚心请教,一方面技术上不要保密 一方面虚心请教, –学习上要大气,不要纠缠太多的细节 学习上要大气,
2010-1-4
计算机控制技术
7
第0章 课程简介
主要参考源
有关书籍
–比较慢,但理论相对上系统与成熟一些 比较慢,
有关会议论文集
–快,新思想与新方法多,但较为粗糙 新思想与新方法多,
有关期刊,报纸 有关期刊,
–期刊要慢一些,报纸快,但不易保存 期刊要慢一些,报纸快,
有关网站
–信息量大,检索查询容易,但垃圾信息较多 信息量大,检索查询容易,
2010-1-4 计算机控制技术 8
第0章 课程简介
常见国内自动化类杂志
《微型计算机控制技术》于海生第章

1.模块化程序设计
(1) 首先对最低层模块进行编码、测试和调试。这些模块正 常工作后,就可以用它们来开发较高层的模块。这种方法 是汇编语言设计常用的方法。 (2) 首先对最高层进行编码、测试和调试。为了测试这些最 高层模块,可以用“结点”来代替还未编码的较低层模块, 这些“结点”的输入和输出满足程序的说明部分要求,但 功能少得多。 该方法一般适合用高级语言来设计程序。
除了数字调零外,还可以采用偏移和增益误差的自动校准。
1.全自动校准
自动校准:自动测量基准参数,计算误差模型,获得并存储误差补偿因子。
先把开关接地,测出这时的输入值x0,然后把开关接基准电
压VR,测出输入值x1,并存放x1、x0,在正式测量时,如测
出的输入值为x,则这时的V可用下式计算
V
(
x x0 x1 x0
第一条指令表示将二字节数3435H输出到端口230H中,第二条指令 表示将单字节数26H输出到端口240H中。
6.2 测量数据预处理技术
传感器把生产过程的信号转换成电信号,然后用A/D转换器 把模拟信号变成数字信号,读入计算机中。
对于这样得到的数据,一般要进行一些预处理,其中最基本 的处理有线性化处理、标度变换和误差自动校准。
y yR x xR
如果在校准时,计算并存放yR/xR的值,则测量校 准时,只需行一次乘法即可。有时也可用yi代替yR
人工自动校准特别适于传感器特性随时间会发生变 化的场合。如常用的湿敏电容等湿度传感器。
6.2.2 线性化处理和非线性补偿
1.铂热电阻的阻值与温度的关系
离线计算温度与铂热电阻阻值对应关系表即分度表, 然后分段进行线性化。
2.热电偶的热电势与温度的关系
《微型计算机控制技术》于海生第8章

不同于令牌环的是,在令牌总线中,信息可以双向传送、任何 结点都能“听到”其它结点发出的信息。为此,结点发送的信息 中要有指出下一个要控制的结点的地址。由于只有获得令牌的结 点才可发送信息(此时其它结点只收不发),因此该方式不要检测 冲突就可以避免冲突。
特点:
1.网络必须要有初始化功能,即能够产生一个顺序访问的次序。 这就是一个争用的过程,争用的结果是只有一个站能够获得标记, 并产生次序。
第8章 分布式测控网络技术
数据通信是工业测控网络和分散型测控系统的关键技术 。 对于大规模工业测控系统,需要将任务分给多个计算机系 统并行工作,不同地理位置和不同功能计算机之间需要按 照统一的协议连接和交换信息就构成计算机分布式测控网 络系统。
本章主要介绍工业网络和通信技术、分布式控制系统、 现场总线技术、综合自动化技术和分布式测控网络设计举 例。
网络结构,该种结构最适于信息管理系统、办公室自动化系统、 教学系统等领域的应用。
(4)树形结构
结构: 分层结构,适用于分级管理和控制系统。
特点: ①通讯线路总长度较短,连网成本低,易于扩展,但结构较 星形复杂; ②网络中除叶结点外,任一结点或连线的故障均影响其所在 支路网络的正常工作。
2.介质访问控制技术
① 当某结点检测到信道被占用后,继续检测,发现空闲,立 即发送;
② 当某点检测到信道被占用后就延迟一个随机时间,然后再 检测。重复这一过程,直到信到空闲,开始发送。 冲突的解决方法:
由于传输线上不可避免的有时间的延迟,有可能多个站同时 监听到线上空闲并开始发送,从而导致冲突。因此,当结点开 始发送信息时,该结点继续对网络检测一段时间,且把收到的 信息和自己发送的信息进行比较,若相同,则发送正常进行; 若不同,说明由其它结点发送信息,引起混乱,应立即停止, 等待一个随机时间,在重复上述过程。
微型计算机控制技术 (于海生 著)清华大学出版社

1.12 1.2 1.212DDS3SCC4DCS5FCSDCS1.411234--521231234562.12.2 74LS24474LS273PC8819 2.1 2.2portMOV DX portIN AL , DXMOV AL , DATAMOV DX , portOUT DX AL2.3 8A/D ADC08098255A PC8828 2.158ADC0809 PROC NEARMOV CX , 8CLDMOV BL , 00HLEA DI , DATABUFNEXT: MOV DX , 02C2HMOV AL , BLOUT DX , ALINC DXMOV AL , 00000111B //OUT DX , ALDEC DXNOSC: IN AL , DXTEST AL , 80HJNZ NOSC //NOEOC: IN AL ,DXTEST AL ,80HJZ NOEOC // EOC=0MOV DX , 02C0H //IN AL , DXSTOS DATABUFINC BL //LOOP NEXTRETADC0809 ENDP2.5 I/V I/V32 2.191R3AC5R31 2.18CD5V D2R2R5V2.6T0T2T kTA/DA/D2.7A/D2.8 8A/D100s A/D0.4%6.4Zf H2.9 8255A AD574LF398CD4051PC8836 2.258255A2C0H2C3H8255A DS ES BUF837 2.26AD574A PROC NEARCLDLEA DI , BUFMOV BL , 00000000B //MOV CX , 8ADC : MOV DX , 2C2HMOV AL , BLOUT DX , ALNOPNOPOR AL , 01000000B OUT DX , ALAND AL , 10111111B OUT DX , AL MOV DX , 2C0HPULLING: IN AL , DXTEST AL , 80H JNZ PULLING MOV AL , BLOR AL , 00010000B MOV DX , 2C2H OUT DX , ALOR AL , 01000000B OUT DX , AL MOV DX , 2C0H IN AL , DX AND AL , 0FH MOV AH , AL INC DXIN AL , DX STOSW INC BL LOOP ADCMOV AL , 00111000B MOV DX ,2C2H OUT DX , AL RETADC574A ENDP 2.10 DAC0832PCD/A412.29DAC0832200H,8 2 6DHMOV DX 200H MOV AL 6DH OUT DX AL HLT 2.12D/AD/A442.331OUT V DREFV nD/A1*2OUT REF nDV V 2OUT V 32112(*)OUT REF OUT REF R V V V V R 2.13DAC0832CD4051PC 88482.408BUF0BUF78DSDOUT PROC NEARMOV BX , OFFSET BUFNEXT: MOV AL , [BX]OUT DX , AL INC DX OUT DX , AL CALL DELAY INC AH DEC DX LOOP NEXT RETDOUT ENDPDELAY4.11D S2T3D SD Z454.2()D s DZsD s1211()11T z T z D z T z Tz()()()U z D z E z 112211()(2)(2)()()(2)(2)()U z TT T T z U z E z TT T T z E z 112()2)()(2)(1)(2)(1)]u k TT e k TT e k TT u k sD s()D z 11221()[()()(1)()(1)]u k T e k T T e k T T u k T sDs()D z211()(1)()()(1)]u k T u k T T e k T e k 4.3PIDPID()[()()p Du k K e k k T PID(1)[(1)()()()(1)P Du k K e k i T u k u k u k PID1234.4()()()U s D s E s T=0.2SC()()()U s D s E s()()t t()(),[0.2]k e k Ts m=0.085()(()(1)(1)((1)(2)()()(1)(1)(()((1)u k k k k u k k k k u k u k u k u k u k e k e k k ()0.298[(1)(2)] 1.298[()(2)] 1.895(1)u k u k u k e k e k e k 4.5123110()0()()u k u k u u ku PID1(1)u k u ()0e k ()e k 1(1)uku ()0e k 1z12()atf t e 2()F s 12()akTf k e 222()1aT aTaT e z F z ee z2()F s 2()2ttf t ee2()2()kTkTf k e eF z2z1()F z 2()F z 1Z1113115()0.813115z F z z z22211()(1)(2)zF z z zz z z3()F z 2(0)lim () 1.6z f F z 111()lim(1)()0z zf z F z 4z(2)4(1)3()2(0)(1)0y k y k y k ky y 5z1()G s 211()()()(1()()()(1TsTse G s k k ka b a b a b ab e k k ka ab b a b ab G z z 2()G z 4.61A/D,D/A234564.7PID(1) (2)1IT 180%IT (3)DT 012PkT 3DDC4,,,p I DT K T T 123c,,,p I DT K T T 4.81()G z 2([()()]()]G z H s G s Z s3(D z 4()D z 10101(()()()()()()mi ii mn iii i i i mni i i i bz D z U z bz E z az U z u k be k i au k i 4.9(c G s 1T s1()D z ()y k ()u k ()e k2()D z ()y k ()u k ()e k : (1)1()(1)11G z Z z Z 0,0,1,1,11d u v j q j q m u d u v j q 11()(11Tz z r t t R z 1111()1()[1](1)()1v jq e i i i z z a z z F z z 112112111()1()1,()()e z z z f z f z z z z D z1()()()(1110()01,2,.....e E z z R z z k e k k1()()()00()11,2,...z Y z R z z k y k k ()()()1()0,1,2,...9k U z E z D z u k k2(1G z 0,1,0,2,1d v w q j j q 12mw d n v j q ()()()1r t t R z 12122122212212()(1)()()1() 2.1()2e e z z z f zf z z z f f z z z1121()D z z121()()()(1)()(1)e E z z R z z z e k k 234()()()234...00,1()2,3,...Y z R z z z z z k y k kk 1()()()()0.1*(1)k U z E z D z u k kThis document was created with Win2PDF available at . The unregistered version of Win2PDF is for evaluation or non-commercial use only.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
5 c2 ( s 5) F (s) s 5 2 s
1 , 5 s 5
1 1 1 F ( s) 2 s 5s 5( s 5) 查表得
z 1 Z s z 1
整理得
Y ( z)[ z 1.5z 0.5] z y(T ) y(2T ) 1.5 y(T )
带入初始值得
2
1
1
Y ( z )[ z 2 1.5 z 1 0.5] z 1 0.5 0.75 1.5 0.5 0.5 z 1.5 0.5 z 1.5 z Y ( z ) 2 1 2 z 1.5 z 0.5 1 1.5 z 0.5 z
习题:已知被控对象的传递函数为 ,采样周 期T=1s。采用零阶保持器,要求针对单位阶跃输入信号 设计最少拍有纹波控制器,求出系统误差和系统的输出。 解: G( z) Z[ H (s) Gc (s)]
1 e Ts 10 10 Z[ ] (1 z 1 ) Z [ ] 2 s s (0.1s 1) s (0.1s 1)
三相六拍工作方式下的控制字表 存贮地址编号 AD1 AD2 AD3 AD4 AD5 AD6 A口输出字 01H 03H 02H 06H 04H 05H
2
求
5 的Z变换 F (z ) F ( s) 2 s ( s 5)
解: F ( s) c11 c12 c2 s2 s s 5 5 2 c11 s F (s) 1 s 0 s 5 s 0
u(k )T 2T2 T 2T2 u(k 1)
e(k )(T 2T1 ) (T 2T1 )e(k 1)
T 2T2 T 2T1 T 2T1 u (k ) u (k 1) e( k ) e(k 1) T 2T2 T 2T2 T 2T2
3 2
解:按要求整理得
F ( z ) 11z 15 z 6 z ( z 2)( z 1) 2
2
F ( z) c1 c21 c22 G( z ) 2 z z 2 ( z 1) z 1
11z 2 15 z 6 c1 ( z 2)G( z ) z 2 20 2 ( z 1) z 2 11z 2 15 z 6 2 c21 ( z 1) G( z ) 2 z 1 z2 z 1
E ( z ) R ( z ) e ( z )
1 (1 z 1 ) 1 1 z 1
z 1 z 2 z 3 ...
z 1 Y ( z ) R( z )( z ) 1 z 1
9 z 1 (1 0.111 z 1 ) G( z) (1 z 1 )(1 0.0000454 z 1 )
5.某系统的Z传递函数为Φ(z) = 0.5(z+0.5) / (z+1.2)(z-0.5) , 可知该系统是 。 A稳定的;B不稳定的;C 临界稳定的。 6.在确定A/D变换器精度时,通常要求它的精度应 B 传 感器的精度。 A 大于;B 小于;C 等于。 7.已知A点信号如图所示,试画出B点、C点的信号图形,设 采样周期T=/4。
Gc ( s)
10 s(0.1s 1)
9 z 1 (1 0.111 z 1 ) G( z) (1 z 1 )(1 0.0000454 z 1 )
上式中,d=0, u=0, v=1, j=1, q=1,且j≤q ,则有: m=u+d=0 F1 ( z ) 1 n=v-j+q=1 F2 ( z ) f 21 z 1 对单位阶跃输入信号,选择
递推控制算法为:
T 2T2 T 2T1 T 2T1 u (k ) u (k 1) e( k ) e(k 1) T 2T2 T 2T2 T 2T2
增量控制算法为:
2T T 2T1 T 2T1 u (k ) u (k ) u (k 1) u (k 1) e( k ) e(k 1) T 2T2 T 2T2 T 2T2
递推控制算法为:
u(k ) 0.08u(k 1) 1.46e(k ) 0.38e(k 1)
增量控制算法为:
u(k ) u(k ) u(k 1) 1.08u(k 1) 1.46e(k ) 0.38e(k 1)
R C
补充习题: 1.图1所示的有源RC网络是一种 环节。 A 积分;B 微分;C 惯性。
e ( z ) 1 ( z )
1 f 21z 1 (1 z 1 )
根据多项式相等,其系数相等的的性质,有
f 21 1
所以,
( z ) z 1 1 ( z ) D( z ) G ( z ) 1 ( z )
(1 z 1 )(1 0.0000454 z 1 ) z 1 . 1 1 9 z (1 0.111 z ) (1 z 1 ) 0.111(1 0.0000454 z 1 ) (1 0.111 z 1 )
1 e ( z ) 1 ( z ) [ (1 ai z 1 )](1 z 1 ) q F1 ( z ) (1 z )
v j i 1
1 ( z ) z d [ (1 bi z 1 )]F2 ( z ) f 21 z
u
i 1
根据上两式,有
D( z )
U ( z) (T 2T1 ) z T 2T1 E ( z ) (T 2T2 ) z T 2T2
U ( z ) (T 2T1 ) (T 2T1 ) z 1 E ( z ) (T 2T2 ) (T 2T2 ) z 1
U ( z )[(T 2T2 ) (T 2T2 ) z 1 ] [(T 2T1 ) (T 2T1 ) z 1 ]E ( z )
R
usr usc
图1
2.在单位闭环负反馈控制系统里,通常若增大系统的开环 放大系数,则系统的稳定程度 。 A 减弱;B 不变;C 增强。 3.连续系统传递函数的一个极点P=-5,Z变换后将映射到Z 平面的 。 A 单位园外;B 单位园上;C 单位园里。 4.计算机控制系统与连续系统相比,在系统结构与参数不 变的条件下,抑制干扰的能力 A 增强; B 减弱; C 不变。
2 1
z 3z Y ( z) 1 3z Y ( z) 2 2 z 2 3z z z 3z 2 Y ( z) A B z z 1 z 2 z z Y ( z ) 2 5 z 1 z2
2
z k 因为 Z [ ]a za
1
1.85u(k ) 0.15u(k 1) 2.7e(k ) 0.7e(k 1)
u (k )
0.15 2.7 0.7 u (k 1) e(k ) e(k 1) 1.85 1.85 1.85
u(k ) 0.08u(k 1) 1.46e(k ) 0.38e(k 1)
s
U ( z) 2.7 z 0.7 2.7 0.7 z 1 D( z ) E ( z ) 1.85 z 0.15 1.85 0.15 z 1
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z )
U ( z )(1.85 0.15 z 1 ) (2.7 0.7 z 1 ) E ( z ) 1.85U ( z ) 0.15 z 1U ( z ) 2.7 E ( z ) 0.7 z 1 E ( z )
1.采用8255的PA端口作为三相步进的控制接口,并用直流 SSR驱动三相步进电机,用电阻或电感表示步进电机每相绕 组。 要求:(1)画出接口电路原理图; (2)列出步进电机在三相双三拍和三相六拍工作方 式下的输出控制字表。 微 型 计 算 机
8255
(2)双三拍工作方式下的控制字表
存贮地址编号 AD1 AD2 AD3 A口输出字 03H 06H 05H
U ( s) 1 0.17 s 2、已知模拟调节器的传递函数为 D( s) E ( s) 1 0.085 s
试写出相应数字控制器的位置型和增量型的控制算式,设采 样周期T=0.2s。
解:双线性变换公式为: s
2 z 1 T z 1
2 z 1 T z 1
1 0.17 s U ( z) D( z ) D( s) s 2 z 1 1 0.085 s E( z) T z 1
Tz 1 Z 2 2 s ( z 1)
z 1 Z z e aT s a
Tz 1 z 1 z F ( z) 2 5T ( z 1) 5 z 1 5 z e
3
11z 15 z 6 z 求 F ( z) 的Z反变换 f (k ) 2 ( z 2)( z 1)
所以 y(k ) 2 (1) k 5 (2) k , k 0,1,2,3
作业: P139
4.2 4.4
U ( s) 1 T1s E ( s) 1 T2 s
1、某系统的连续控制器设计为 D( s)
试用双线性变换法、前向差分法、后向差分法分别求出数字 控制器D(z),并分别给出三种方法的递推控制算法。 解:双线性变换公式为: s
20 z 2z 9z F ( z) 2 z 2 ( z ] f (k ) 20 2 2k 9
k
1
4 用Z变换求 y(k 2) 1.5 y(k 1) 0.5 y(k ) 0的解, 已知初始条件为y(T ) 0.5, y(2T ) 0.75 解:对上述差分方程两边Z变换,利用延迟性质