四元数,欧拉角,矩阵的相互转换
旋转矩阵、旋转向量、欧拉角、四元数的关系

旋转矩阵、旋转向量、欧拉⾓、四元数的关系向量的矩阵形式有两个向量:→a =(a 1,a 2,a 3)→b =(b 1,b 2,b 3)叉乘的结果表⽰⼀个向量,这个向量向量垂直于a,b 向量构成的平⾯。
→a ×→b =‖e 1e 2e 3a 1a 2a 3b 1b 2b 3‖=a 2b 3−a 3b 2a 3b 1−a 1b 3a 1b 2−a 2b 1=0−a 3a 2a 30−a 1−a 2a 10b 1b 2b 3=a ∧b将向量a 对应的矩阵表⽰出来,为⼀个反对称矩阵,每⼀个向量都对应着⼀个反对称矩阵。
这就引出向量的矩阵形式。
a ∧=0−a 3a 2a 30−a 1−a 2a 1坐标变换的易混点在齐次变换中p 1=T 12·p 2p 2=T 23·p 3T 12表⽰,把坐标系{2}的向量变换到坐标系{1}中,T 23同理,如果把坐标系{3}下的向量变换到坐标系{1}中为:p 1=T 12·T 23·p 3旋转向量和欧拉⾓: SO(3)的旋转矩阵有9个量,但是只有3个⾃由度,同理SE(3)有16个量,但是也只有6个⾃由度。
在实际的旋转中,任意的旋转都可⽤⼀个旋转轴和⼀个旋转⾓来表⽰,我们使⽤⼀个向量,⽅向与旋转轴⼀致,长度等于旋转⾓,这样只需要⼀个三维向量即可描述旋转。
对于SE(3),⽤⼀个旋转向量和⼀个平移向量即可表达,恰好⾃由度为6.如果⽤旋转向量来描述R :旋转轴为⼀个单位长度的向量n,⾓度为θ,那么θn 可以表⽰这个旋转。
旋转矩阵R 和旋转向量θn 的转换过程为罗德⾥格斯变换:R =cos θI +(1−cos θ)nn T +sin θn ∧此处末尾的n ∧ 如上⾯所⽰,代表矩阵表⽰的向量。
那么反过来通过旋转矩阵获取转⾓ θ;θ=arccostr (R )−12tr(R)为矩阵R 的迹。
对于转轴n,Rn=n;表⽰为转轴绕⾃⾝转动不⽣改变,从数学来说n 是矩阵R 特征值为1时对应的特征向量。
旋转矩阵、欧拉角、四元数理论及其转换关系

旋转矩阵、欧拉⾓、四元数理论及其转换关系1. 概述旋转矩阵、欧拉⾓、四元数主要⽤于表⽰坐标系中的旋转关系,它们之间的转换关系可以减⼩⼀些算法的复杂度。
本⽂主要介绍了旋转矩阵、欧拉⾓、四元数的基本理论及其之间的转换关系。
2、原理2.1 旋转矩阵对于两个三维点p1(x1,y1,z1),p2(x2,y2,z2),由点 p1 经过旋转矩阵 R 旋转到 p2,则有注:旋转矩阵为正交矩阵RR^T=E任意旋转矩阵:任何⼀个旋转可以表⽰为依次绕着三个旋转轴旋三个⾓度的组合。
这三个⾓度称为欧拉⾓。
三个轴可以指固定的世界坐标系轴,也可以指被旋转的物体坐标系的轴。
三个旋转轴次序不同,会导致结果不同。
2.2 欧拉⾓欧拉⾓有两种:静态:即绕世界坐标系三个轴的旋转,由于物体旋转过程中坐标轴保持静⽌,所以称为静态。
动态:即绕物体坐标系三个轴的旋转,由于物体旋转过程中坐标轴随着物体做相同的转动,所以称为动态。
使⽤动态欧拉⾓会出现万向锁现象;静态欧拉⾓不存在万向锁的问题。
对于在三维空间⾥的⼀个参考系,任何坐标系的取向,都可以⽤三个欧拉⾓来表现。
参考系⼜称为实验室参考系,是静⽌不动的。
⽽坐标系则固定于刚体,随着刚体的旋转⽽旋转。
如图1,设定xyz-轴为参考系的参考轴。
称xy-平⾯与XY-平⾯的相交为交点线,⽤英⽂字母(N)代表。
zxz顺规的欧拉⾓可以静态地这样定义:α是x-轴与交点线的夹⾓,β是z-轴与Z-轴的夹⾓,γ是交点线与X-轴的夹⾓。
图中三个欧拉⾓分别为:(α,β,γ);蓝⾊的轴为:xyz轴红⾊的轴为:XYZ轴绿⾊的线为交线:Nα∈[0,2π],β∈[0,π],γ∈[0,2π]很可惜地,对于夹⾓的顺序和标记,夹⾓的两个轴的指定,并没有任何常规。
科学家对此从未达成共识。
每当⽤到欧拉⾓时,我们必须明确的表⽰出夹⾓的顺序,指定其参考轴。
实际上,有许多⽅法可以设定两个坐标系的相对取向。
欧拉⾓⽅法只是其中的⼀种。
此外,不同的作者会⽤不同组合的欧拉⾓来描述,或⽤不同的名字表⽰同样的欧拉⾓。
ABB机器人欧拉角与四元数转化

ABB机器人欧拉角与四元数转化转载请先后台留言,大家一起支持原创,推动机器人使用和发展本公众号对各类ABB机器人应用,仿真,毕业设计提供技术支持,详细后台留言本公众号诚挚希望与各机器人培训机构,机器人使用单元合作,提供技术支持,详细后台留言1. 机器人空中点位表示方法通常是x,y,z,a,b,c,其中a,b,c表示该点的旋转姿态。
定义分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
2. 通过用于描述坐标系各轴相对于参考系统的方向的旋转矩阵,描述坐标系的姿态(诸如工具的姿态)(参见下图)。
旋转后的坐标系轴(x,y,z)为矢量,其可以用参考坐标系表示如下:x = (x1, x2, x3)y = (y1, y2, y3)z = (z1, z2, z3)这意味着参考坐标系中x矢量的x轴向分量将为x1,y轴向分量将为x2,以此类推。
这三个矢量可在一个矩阵(旋转矩阵)中组合,各矢量由此构成一栏:四元数仅仅是一种描述此旋转矩阵的更为简洁的方式;根据旋转矩阵的各元素,计算四元数:3. 综合以上,可以得到欧拉角--四元数的转化如下4 可以得到四元数--欧拉角的转化如下arctan和arcsin的结果是,这并不能覆盖所有朝向(对于角的取值范围已经满足),因此需要用atan2来代替arctan5. ABB机器人提供了欧拉角与四元数转化的相关函数,其中object.rot := OrientZYX(anglez, angley, anglex) 函数为欧拉角-四元数函数,注意函数中的顺序为rz,ry,rxanglex := EulerZYX(X, object.rot); 函数为四元数-欧拉角函数,此处举例提取绕X旋转角度,也可提取绕Y和绕Z旋转角度。
6. 在RAPID端可以自己编写函数,得到欧拉角与四元数转化函数,如下•••••••••••••••••••••••••••••••••••••••••••FUNC orient eulerAnglesToQuaternion(num hdg,num pitch, num roll) //返回四元数VAR num cosRoll; VAR num sinRoll;VAR num cospitch; VAR num sinpitch; VAR num cosheading; VAR num sinheading; VAR orient orient1; cosRoll:=Cos(roll*0.5);sinRoll:=Sin(roll*0.5); cosPitch:=Cos(pitch*0.5);sinPitch:=Sin(pitch*0.5); cosHeading:=Cos(hdg*0.5); sinHeading:=Sin(hdg*0.5);orient1.q1:=cosRoll*cosPitch*cosHeading+sinRoll*sinPitch*s inHeading; orient1.q2:=sinRoll*cosPitch*cosHeading-cosRoll*sinPitch*sinHeading;orient1.q3:=cosRoll*sinPitch*cosHeading+sinRoll*cosPitch*sinH eading; orient1.q4:=cosRoll*cosPitch*sinHeading-sinRoll*sinPitch*cosHeading; RETURN orient1; ENDFUNC FUNC num quaternionT oEulerAngles(\switch X|switch Y|switch Z,orient orient1) //返回欧拉角VAR num q0 VAR num q1; VAR num q2; VAR num q3; q0:=orient1.q1; q1:=orient1.q2; q2:=orient1.q3; q3:=orient1.q4; IF present(x) return atan2(2*(q2*q3+q0*q1),q0*q0-q1*q1-q2*q2+q3*q3); IF present(y) return asin(2*(q0*q2-q1*q3)); IF present(z) RETURN atan2(2*(q1*q2+q0*q3),q0*q0+q1*q1-q2*q2-q3*q3); //roll=atan2f(2. f*(q2q3+q0q1),q0q0-q1q1-q2q2+q3q3); //pitch=asinf(2. f*(q0q2-q1q3)); //yaw=atan2f(2. f*(q1q2+q0q3),q0q0+q1q1-q2q2-q3q3); ENDFUNC********************************如何获取更多经典文章?。
四元数与欧拉角(RPY角)的相互转换

四元数与欧拉⾓(RPY⾓)的相互转换RPY⾓与Z-Y-X欧拉⾓ 描述坐标系{B}相对于参考坐标系{A}的姿态有两种⽅式。
第⼀种是绕固定(参考)坐标轴旋转:假设开始两个坐标系重合,先将{B}绕{A}的X轴旋转γ,然后绕{A}的Y轴旋转β,最后绕{A}的Z轴旋转α,就能旋转到当前姿态。
可以称其为X-Y-Z fixed angles或RPY⾓(Roll, Pitch, Yaw)。
Roll:横滚 Pitch: 俯仰Yaw: 偏航(航向) 由于是绕固定坐标系旋转,则旋转矩阵为(cα is shorthand for cosα, sα is shorthand for sinα,and so on.)R XYZ(γ,β,α)=R Z(α)R Y(β)R X(γ)=cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ 另⼀种姿态描述⽅式是绕⾃⾝坐标轴旋转:假设开始两个坐标系重合,先将{B}绕⾃⾝的Z轴旋转α,然后绕Y轴旋转β,最后绕X轴旋转γ,就能旋转到当前姿态。
称其为Z-Y-X欧拉⾓,由于是绕⾃⾝坐标轴进⾏旋转,则旋转矩阵为:R Z′Y′X′(α,β,γ)=R Z(α)R Y(β)R X(γ)=cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ 可以发现这两种描述⽅式得到的旋转矩阵是⼀样的,即绕固定坐标轴X-Y-Z旋转(γ,β,α)和绕⾃⾝坐标轴Z-Y-X旋转(α,β,γ)的最终结果⼀样,只是描述的⽅法有差别⽽已。
In gerenal: three rotations taken about fixed axes yield the same final orientation as the same three rotations taken in opposite order about the axes of the moving frame.Axis-Angle与四元数 绕坐标轴的多次旋转可以等效为绕某⼀转轴旋转⼀定的⾓度。
四元数转欧拉角的雅可比矩阵
四元数转欧拉角的雅可比矩阵四元数是一种用来表示旋转的数学工具,它可以将旋转操作转化为数学计算。
而欧拉角则是一种常用的旋转表示方法,它通过三个角度来描述物体在空间中的旋转状态。
那么,如何将四元数转换为欧拉角呢?本文将介绍四元数转欧拉角的雅可比矩阵,并探讨其应用。
我们需要了解什么是雅可比矩阵。
雅可比矩阵是用来描述函数的局部线性近似的矩阵,它可以将函数的变化率与输入的变化率联系起来。
在四元数转欧拉角的问题中,雅可比矩阵可以帮助我们计算四元数对欧拉角的导数,从而实现四元数到欧拉角的转换。
四元数可以表示为q = [w, x, y, z],其中w为实部,x、y、z为虚部。
欧拉角通常使用三个角度表示,如yaw(偏航角)、pitch(俯仰角)和roll(翻滚角)。
我们可以使用雅可比矩阵来计算四元数对欧拉角的导数,如下所示:J = [d(yaw)/dq, d(pitch)/dq, d(roll)/dq]其中,d(yaw)/dq表示yaw角对四元数的导数,其他类似。
这个雅可比矩阵的计算可以通过数学推导得到,具体过程不再赘述。
在实际应用中,我们可能需要根据物体的旋转状态来计算其在不同坐标系下的位置。
这时,我们可以使用四元数转欧拉角的雅可比矩阵来实现。
首先,我们根据物体的旋转状态得到四元数表示,然后使用雅可比矩阵计算四元数对欧拉角的导数。
最后,根据导数的计算结果,我们可以将四元数转换为欧拉角表示。
雅可比矩阵的计算涉及到复杂的数学推导和矩阵运算,这里不再详细介绍。
需要注意的是,由于四元数的性质和欧拉角的定义,四元数转欧拉角的雅可比矩阵存在一些特殊性质,例如奇异性和非唯一性。
在具体应用中,我们需要根据实际情况进行调整和处理,以确保结果的准确性和稳定性。
总结一下,本文介绍了四元数转欧拉角的雅可比矩阵,并探讨了其应用。
雅可比矩阵可以帮助我们计算四元数对欧拉角的导数,从而实现四元数到欧拉角的转换。
在实际应用中,我们可以根据物体的旋转状态使用雅可比矩阵来计算其在不同坐标系下的位置。
三维旋转:旋转矩阵,欧拉角,四元数

三维旋转:旋转矩阵,欧拉⾓,四元数原⽂见我的,欢迎⼤家过去评论。
如何描述三维空间中刚体的旋转,是个有趣的问题。
具体地说,就是刚体上的任意⼀个点P(x, y, z)围绕过原点的轴(i, j, k)旋转θ,求旋转后的点P\'(x\', y\', z\')。
旋转矩阵旋转矩阵乘以点P的齐次坐标,得到旋转后的点P',因此旋转矩阵可以描述旋转,$$\begin{bmatrix}x'\\ y'\\ z'\\ 1\end{bmatrix}=R\cdot \begin{bmatrix}x\\ y\\ z\\ 1\end{bmatrix}$$绕x,y,或z轴旋转θ的矩阵为:$$R_{x}(\theta)=\begin{bmatrix}1 & 0 & 0\\ 0 & \cos\theta & -\sin\theta\\ 0 & \sin\theta & \cos\theta\end{bmatrix}$$$$R_{y}(\theta)=\begin{bmatrix}\cos\theta & 0 & -\sin\theta\\ 0 & 1 & 0\\ \sin\theta & 0 & \cos\theta\end{bmatrix}$$$$R_{z}(\theta)=\begin{bmatrix}\cos\theta & -\sin\theta & 0\\ \sin\theta & \cos\theta & 0\\ 0 & 0 & 1\end{bmatrix}$$所以,绕任意轴旋转的矩阵为$$R_{x}(-p)\cdot R_{y}(-q)\cdot R_{z}(\theta)\cdot R_{y}(q)\cdot R_{x}(p)$$这表⽰:1. 绕x轴旋转⾓度p使指定的旋转轴在xz平⾯上2. 绕y轴旋转⾓度q使指定的旋转轴与z轴重合3. 绕z轴旋转⾓度θ4. 绕y轴旋转⾓度-q5. 绕x轴旋转⾓度-p其中,p和q的值需要⽤i,j,k计算出来。
eigen中四元数、欧拉角、旋转矩阵、旋转向量

eigen中四元数、欧拉⾓、旋转矩阵、旋转向量⼀、旋转向量1.0初始化旋转向量:旋转⾓为alpha,旋转轴为(x,y,z)Eigen::AngleAxisd rotation_vector(alpha,Vector3d(x,y,z))1.1旋转向量转旋转矩阵Eigen::Matrix3d rotation_matrix;rotation_matrix=rotation_vector.matrix();Eigen::Matrix3d rotation_matrix;rotation_matrix=rotation_vector.toRotationMatrix();1.2旋转向量转欧拉⾓(Z-Y-X,即RPY)Eigen::Vector3d eulerAngle=rotation_vector.matrix().eulerAngles(2,1,0);1.3旋转向量转四元数Eigen::Quaterniond quaternion(rotation_vector);Eigen::Quaterniond quaternion;Quaterniond quaternion;Eigen::Quaterniond quaternion;quaternion=rotation_vector;⼆、旋转矩阵2.0初始化旋转矩阵Eigen::Matrix3d rotation_matrix;rotation_matrix<<x_00,x_01,x_02,x_10,x_11,x_12,x_20,x_21,x_22;2.1旋转矩阵转旋转向量Eigen::AngleAxisd rotation_vector(rotation_matrix);Eigen::AngleAxisd rotation_vector;rotation_vector=rotation_matrix;Eigen::AngleAxisd rotation_vector;rotation_vector.fromRotationMatrix(rotation_matrix);2.2旋转矩阵转欧拉⾓(Z-Y-X,即RPY)Eigen::Vector3d eulerAngle=rotation_matrix.eulerAngles(2,1,0);2.3旋转矩阵转四元数Eigen::Quaterniond quaternion(rotation_matrix);Eigen::Quaterniond quaternion;quaternion=rotation_matrix;三、欧拉⾓3.0初始化欧拉⾓(Z-Y-X,即RPY)Eigen::Vector3d eulerAngle(yaw,pitch,roll);3.1欧拉⾓转旋转向量Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitX()));Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitZ()));Eigen::AngleAxisd rotation_vector;rotation_vector=yawAngle*pitchAngle*rollAngle;3.2欧拉⾓转旋转矩阵Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitX()));Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitZ()));Eigen::Matrix3d rotation_matrix;rotation_matrix=yawAngle*pitchAngle*rollAngle;3.3欧拉⾓转四元数Eigen::AngleAxisd rollAngle(AngleAxisd(eulerAngle(2),Vector3d::UnitX()));Eigen::AngleAxisd pitchAngle(AngleAxisd(eulerAngle(1),Vector3d::UnitY()));Eigen::AngleAxisd yawAngle(AngleAxisd(eulerAngle(0),Vector3d::UnitZ()));Eigen::Quaterniond quaternion;quaternion=yawAngle*pitchAngle*rollAngle;四、四元数4.0初始化四元数Eigen::Quaterniond quaternion(w,x,y,z);4.1四元数转旋转向量Eigen::AngleAxisd rotation_vector(quaternion);Eigen::AngleAxisd rotation_vector;rotation_vector=quaternion;4.2四元数转旋转矩阵Eigen::Matrix3d rotation_matrix;rotation_matrix=quaternion.matrix();Eigen::Matrix3d rotation_matrix;rotation_matrix=quaternion.toRotationMatrix();4.4四元数转欧拉⾓(Z-Y-X,即RPY)Eigen::Vector3d eulerAngle=quaternion.matrix().eulerAngles(2,1,0);代码⽰例:#include<iostream>#include<Eigen/Eigen>using namespace std;#define pi 3.14159265359int main(){cout << "##-------------------搞清旋转关系-------------------##" << endl;Eigen::Vector3d v1(1, 1, 0);//列向量(1系下)Eigen::AngleAxisd angle_axis1(pi / 4, Eigen::Vector3d(0, 0, 1));//1系绕z轴逆时针旋转45得到2系Eigen::Vector3d rotated_v1 = angle_axis1.matrix().inverse()*v1;cout << "绕z轴逆时针旋转45°(R12):" << endl << angle_axis1.matrix() << endl;cout << "(1, 1, 0)旋转后:" << endl << rotated_v1.transpose() << endl;cout << "------------------------------------------------------" << endl;Eigen::Vector3d v2;v2 << 0, 1, 1;Eigen::AngleAxisd angle_axis2(pi / 4, Eigen::Vector3d(1, 0, 0));//1系绕x轴逆时针旋转45得到2系Eigen::Vector3d rotated_v2 = angle_axis2.matrix().inverse()*v2;cout << "绕x轴逆时针旋转45°(R12):" << endl << angle_axis2.matrix() << endl;cout << "(0, 1, 1)旋转后:" << endl << rotated_v2.transpose() << endl;cout << "------------------------------------------------------" << endl;Eigen::Vector3d v3(0, 0, 0);v3.x() = 1;v3[2] = 1;Eigen::AngleAxisd angle_axis3(pi / 4, Eigen::Vector3d(0, 1, 0));//1系绕y轴逆时针旋转45得到2系Eigen::Vector3d rotated_v3 = angle_axis3.matrix().inverse()*v3;cout << "绕y轴逆时针旋转45°(R12):" << endl << angle_axis3.matrix() << endl;//注意和绕x轴z轴不⼀样 cout << "(1, 0, 1)旋转后:" << endl << rotated_v3.transpose() << endl;cout << "##-------------------常⽤数学运算-------------------##" << endl;Eigen::Vector3d v4(1, 1, 0);cout << "(1, 1, 0)模长:" << v4.norm() << endl;cout << "(1, 1, 0)单位向量:" << v4.normalized().transpose() << endl;Eigen::Vector3d v5(1, 0, 0),v6(0, 1, 0);cout << "(1, 0, 0)点乘(0, 1, 0):" << v5.dot(v6) << endl;cout << "(1, 0, 0)叉乘(0, 1, 0):" << v5.cross(v6).transpose() << endl;cout << "##----------------------使⽤块----------------------##" << endl;Eigen::Matrix<double, 4, 4> T12;T12.Identity();//设为单位阵Eigen::AngleAxisd angle_axis(pi / 4, Eigen::Vector3d(0, 0, 1));Eigen::Matrix3d R12(angle_axis);//⽤⾓轴初始化旋转矩阵Eigen::Vector3d t12;t12.setOnes();//各分量设为1//t.setZero();//各分量设为0T12.block<3, 3>(0, 0) = R12;T12.block<3, 1>(0, 3) = t12;cout << "旋转R12:" << endl << T12.topLeftCorner(3, 3) << endl;cout << "平移t12:" << T12.topRightCorner(3, 1).transpose() << endl;//2系原点在1系下的坐标cout << "##---------------欧式变换矩阵(Isometry)-------------##" << endl;Eigen::Isometry3d T = Eigen::Isometry3d::Identity();//虽然称为3d,实质上是4x4的矩阵(旋转R+平移t)T.linear() = Eigen::Matrix3d::Identity();//旋转部分赋值//T.linear() << 1, 0, 0, 0, 1, 0, 0, 0, 1;//cv::Mat赋值//T.rotate(Eigen::Matrix3d::Identity());//T.rotate(angle_axis);T.translation() = Eigen::Vector3d(1, 1, 1);//平移部分赋值//Eigen::Isometry3d T(quaterniond);//T(0,3) = 1; T(1,3) = 1; T(2,3) = 1;cout << "R_12: " << endl << T.linear().matrix() << endl;//输出旋转部分cout << "t_12:" << T.translation().transpose() << endl;//输出平移部分cout << "T_12: " << endl << T.matrix() << endl;//输出4x4变换矩阵cout << "T_12*(1, 2, 3): " << endl << (T*Eigen::Vector3d(1, 2, 3)).transpose() << endl;//相当于R21*v+t21,隐含齐次坐标(1,2,3,1) //Eigen::Quaterniond q = T.rotation();//Eigen::Quaterniond q(T.linear());//cout << "q: " << q.w() << " " << q.x() << " " << q.y() << " " << q.z() << endl;cout << "##旋转向量(轴⾓)、旋转矩阵、欧拉⾓、四元素相互转换##" << endl;//旋转向量(轴⾓)Eigen::AngleAxisd rotation_vector(pi / 4, Eigen::Vector3d(0, 1, 0));//绕y轴逆时针旋转45度(转yaw)cout << "axi: " << rotation_vector.axis().transpose() << " angle: " << rotation_vector.angle() * 180 / pi << endl;//旋转向量->旋转矩阵Eigen::Matrix3d rotation_matrix3d = rotation_vector.matrix();//Eigen::Matrix3d rotation_matrix3d = rotation_vector.toRotationMatrix();cout << "rotation_matrix:" << endl << rotation_matrix3d << endl;//旋转矩阵->欧拉⾓Eigen::Vector3d euler_angles = rotation_matrix3d.eulerAngles(0,1,2);//(0,1,2)表⽰分别绕XYZ轴顺序,即pitch yaw roll顺序,逆时针为正 cout << "pitch yaw roll = " << euler_angles.transpose() * 180 / pi << endl;//旋转向量->四元素Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector);//或⽤旋转矩阵cout << "q: " << q.w() << "" << q.x() << "" << q.y() << "" << q.z() << endl;//旋转矩阵->旋转向量Eigen::AngleAxisd rotation_vector2;rotation_vector2.fromRotationMatrix(rotation_matrix3d);cout << "axi: " << rotation_vector.axis().transpose() << " angle: " << rotation_vector.angle() * 180 / pi << endl;//四元素->旋转矩阵Eigen::Quaterniond q2 = Eigen::Quaterniond(1, 0, 0, 0);//(w,x,y,z)cout << "q2:" << endl << q2.toRotationMatrix() << endl;cout << "##------------------解线性⽅程------------------##" << endl;//AX = 0//(AX)`(AX)//X`(A`A)XEigen::SelfAdjointEigenSolver<Eigen::Matrix4d> self_adjoint_solver;self_adjoint_pute(ATA);cout << "eigenvalues:\n" << self_adjoint_solver.eigenvalues();cout << "eigenvectors:\n" << self_adjoint_solver.eigenvectors();Eigen::Vector4d wxyz = self_adjoint_solver.eigenvectors().col(0);Eigen::EigenSolver<Eigen::Matrix4d> general_solver;general_pute(ATA);cout << "eigenvalues:\n" << general_solver.eigenvalues();cout << "eigenvectors:\n" << general_solver.eigenvectors();//wxyz = general_solver.eigenvectors().col(0);//AX=BEigen::Vector3d t = A.bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(B);getchar();return0;}参考:。
四元数、欧拉角、旋转矩阵
四元数、欧拉角、旋转矩阵四元数、欧拉角和旋转矩阵是三种常用的描述三维空间中物体旋转的方法。
它们在计算机图形学、物理模拟、机器人学等领域发挥着重要作用。
本文将分别介绍这三种描述方法的原理和应用以及它们之间的关系。
首先,我们来介绍四元数。
四元数是一种具有四个实数分量的数学工具,在三维空间中可以用来表示旋转。
一个四元数可以表示为q = a + bi + cj + dk,其中a、b、c和d都是实数,且满足单位长度条件a^2 + b^2 + c^2 + d^2 = 1。
四元数与旋转的关系可以通过四元数乘法来描述,即两个四元数p和q的乘积pq表示将p所表示的旋转应用到q所表示的向量上。
四元数旋转具有很好的插值性质和无歧义性,因此在计算机图形学等领域得到了广泛应用。
接下来,我们介绍欧拉角。
欧拉角是一种将旋转表示为一系列基本旋转的方法。
在三维空间中,常用的欧拉角包括绕X轴旋转的俯仰角(pitch)、绕Y轴旋转的偏航角(yaw)和绕Z轴旋转的滚转角(roll)。
欧拉角可以通过矩阵乘法来表示旋转,即将三个基本旋转矩阵按顺序相乘。
欧拉角相对直观,易于理解和可视化,但存在万向锁问题,即当某个旋转角接近90度时,会出现无法唯一表示旋转的情况。
最后,我们介绍旋转矩阵。
旋转矩阵是一个3x3的正交矩阵,它通过乘法作用在向量上实现旋转。
旋转矩阵具有正交性和行列式等于1的特点,因此可以保持向量的长度和直角关系。
旋转矩阵也可用于表示三维空间中的旋转,其旋转效果等价于欧拉角表示和四元数表示。
旋转矩阵相对简单,容易计算和处理,但在插值和融合等方面相对复杂。
三种旋转描述方法之间存在着数学上的对应关系。
欧拉角和旋转矩阵可以相互转换,通过旋转矩阵可以计算出对应的欧拉角,反之亦然。
四元数和旋转矩阵也可以相互转换,通过旋转矩阵可以计算出对应的四元数,反之亦然。
尽管存在转换关系,但在实际应用中,需要根据具体需求选择合适的旋转描述方法。
综上所述,四元数、欧拉角和旋转矩阵是描述三维空间物体旋转的常用方法。
python欧拉角,旋转矩阵,四元数之间转换

# 欧拉角到旋转矩阵 r4 = R.from_euler('zxy', [-179.99564367, -87.99992566, 179.99579836], degrees=True) rm = r4.as_matrix() # 0:array([ 1.00000000e+00, -2.74452529e-06, 2.55936075e-06]) # 1:array([-2.65358765e-06, -3.49007933e-02, 9.99390782e-01]) # 2:array([-2.65352955e-06, -9.99390782e-01, -3.49007933e-02])
# 符号相反的四元数, 仍表示同一个旋转 Rq1= [0.71934025092983234, -1.876085535681999e-06, -3.274841213980097e-08, -0.69465790385533299] # 四元数到旋转矩阵 r1 = R.from_quat(Rq1) Rm1 = r1.as_matrix() # 0:array([ 1.00000000e+00, -2.74458557e-06, 2.55936079e-06]) # 1:array([-2.65358979e-06, -3.49007932e-02, 9.99390782e-01]) # 2:array([-2.65358979e-06, -9.99390782e-01, -3.49007932e-02])
欧拉角转四元数 转旋转矩阵

欧拉角转四元数转旋转矩阵欧拉角、四元数和旋转矩阵是常用的表示旋转的方法。
在计算机图形学、机器人学等领域广泛应用。
本文将介绍如何将欧拉角转换为四元数,以及如何将四元数转换为旋转矩阵。
欧拉角是表示旋转的一种方式,它包括三个角度值:俯仰角、偏航角和滚转角。
欧拉角的表示方法有很多种,如 XYZ、ZYZ 等。
这里我们以 XYZ 欧拉角为例。
XYZ 欧拉角表示先绕 x 轴旋转一定角度,再绕 y 轴旋转一定角度,最后绕 z 轴旋转一定角度。
欧拉角的旋转顺序是很重要的,不同的旋转顺序会得到不同的旋转结果。
四元数是一种表示旋转的数学工具,它包含一个实部和三个虚部,可以用一个四维向量表示。
四元数的运算比矩阵运算更快,也更容易组合多个旋转。
四元数旋转的基本原理是将旋转轴和旋转角度转换为一个四元数,然后将这个四元数与待旋转向量相乘得到旋转后的向量。
旋转矩阵是一个 3x3 的矩阵,它可以用来将一个向量绕某个轴旋转一定角度。
旋转矩阵的每一列表示旋转后的 x、y、z 轴方向的向量。
旋转矩阵的乘法是不可交换的,即不同的旋转顺序会得到不同的旋转结果。
下面将介绍如何将欧拉角转换为四元数,以及如何将四元数转换为旋转矩阵。
1. 欧拉角转四元数将 XYZ 欧拉角转换为四元数的公式如下:q = cos(roll/2) * cos(pitch/2) * cos(yaw/2) + sin(roll/2)* sin(pitch/2) * sin(yaw/2) * i- sin(roll/2) * cos(pitch/2) * sin(yaw/2) * j + cos(roll/2) * sin(pitch/2) * sin(yaw/2) * k其中,roll、pitch、yaw 分别表示滚转角、俯仰角和偏航角。
i、j、k 分别表示四元数的虚部,它们满足 i^2=j^2=k^2=ijk=-1。
2. 四元数转旋转矩阵将四元数转换为旋转矩阵的公式如下:R = [1-2*(qj^2+qk^2), 2*(qi*qj-qk*qr), 2*(qi*qk+qj*qr)] [2*(qi*qj+qk*qr), 1-2*(qi^2+qk^2), 2*(qj*qk-qi*qr)][2*(qi*qk-qj*qr), 2*(qj*qk+qi*qr), 1-2*(qi^2+qj^2)] 其中,q 是一个四元数,qi、qj、qk、qr 分别表示四元数的虚部和实部。
四元数与欧拉角间的转换

四元数与欧拉角之间的转换早在1843年哈米尔顿就提出了四元数的基本概念[138],但当时仅停留在理论概念的讨论上。
20世纪以来,随着航天、航空工业的发展,四元数得到了广泛地实际应用[139-142]。
四元数的定义为[143]4q ⎛⎫≡ ⎪⎝⎭Q q(0-1)式中:123(,,)sin 2T q q q α≡=Q e (0-2)4cos2q α= (0-3)其中,e 是沿旋转轴的单位向量,α是旋转角度。
四元数满足约束条件1T =q q(0-4)四元数与姿态矩阵具有如下关系:224334222212341234132422221234123423142222132423141234()22[]()()2()2()2()2()2()2()T T q I q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q ⨯=-+-⨯=Ξψ⎛⎫--++-⎪=--+-++ ⎪⎪+---++⎝⎭A Q QQ Q q q q(0-5)其中,33⨯I 是33⨯单位矩阵,433[]()T q ⨯+⨯⎛⎫Ξ≡ ⎪-⎝⎭I Q q Q(0-6)433[]()T q ⨯-⨯⎛⎫ψ≡ ⎪-⎝⎭I Q q Q(0-7)3231210[]00q q q q q q -⎛⎫ ⎪⨯=- ⎪ ⎪-⎝⎭Q (0-8)地面坐标系Axyz 和弹体坐标系O 1x 1y 1z 1的关系可以用下式来表示=b Ar(0-9)其中,b 、r 分别为某向量在弹体坐标系和地面坐标系中的表示形式,A 的表达形式见错误!未找到引用源。
,具体为cos cos sin cos sin sin cos cos sin sin cos cos sin sin cos cos sin sin cos sin sin cos cos sin sin sin sin cos cos ϑψϑϑψϑψγψγϑγϑψγψγϑψγψγϑγϑψγψγ-⎛⎫⎪=-++ ⎪ ⎪+--+⎝⎭A(0-10)比较式(0-5)和式(0-10),得到姿态角的四元数表示131324222211123412123432231422222212342()arctan arctan arcsin arcsin 2()2()arctan arctan q q q q q q q q q q q q q q q q q q q q ψθφ⎧-=-=-⎪--+⎪⎪==+⎨⎪-⎪=-=-⎪-+-+⎩q q q q q A A A A A (0-11)也可以用姿态角来表示四元数q ,即(cossinj)(cossinj)(cos sin j)222222ψψθθφφ=+⊗+⊗+q(0-12)其中,符号⊗表示四元数乘法,其定义如下[144-145]41234123(i j k)(i j k)A A A A B B B B ⊗=+++⊗+++A B44123114322341232143B A A A A B A A A A A A A A B A A A A B ---⎛⎫⎛⎫ ⎪ ⎪- ⎪⎪= ⎪⎪- ⎪ ⎪ ⎪-⎝⎭⎝⎭44112233144132232431421334211243()()i ()j ()kA B A B A B A B A B A B A B A B A B A B A B A B A B A B A B A B =---++-++++-+-++(0-13)其中,4123i j k A A A A =+++A 和4123i j k B B B B +++B =均为四元数。
欧拉角与四元数
四元数与旋转一.四元组基础Q(x,y,z,w),其中x,y,z用来确定旋转轴,w为旋转的角度Q=w+xi+yj+zk,i,j,k为三个虚轴的单位分量I*j=kJ*k=i;K*i=j;叉乘:c=a × b=| i j k||a1 b1 c1||a2 b2 c2|=(b1c2-b2c1,c1a2-a1c2,a1b2-a2b1)c也为一个向量,且c的长度为|a||b|sin(theta),垂直于a和b所在的平面,方向由右手法则来判定,用右手的四指先表示向量a的方向,然后手指朝着手心的方向摆动到向量b的方向,大拇指所指的方向就是向量c 的方向1.四元组相乘:Q1=w1+x1i+y1j+z1k=(w1,v1)Q2=w2+x2i+y2j+z2k=(w2,v2)Q1*Q2=(w1*w2-<v1,v2>,w1*v2+w2*v1+v1xv2)( w1+x1i+y1j+z1k)*( w2+x2i+y2j+z2k)=w1*w2-x1*x2-y1*y2-z1*z2+(W1*x2+x1*w2+y1*z2-z1-y2)i+(y1*w2+w1*y2+z1*x2-x1*z2)j+(w1*z2+z1*w2+x1*y2-y1*x2)k对于其中的轴部分,假如v1//v2,则有v1 x v2=0(平行向量的叉乘结果为0)2.四元组的点乘,点乘积为数值:Q1.*Q2=w1*w2+<v1,v2>=w1*w2+x1*x2+y1*y2+z1*z2;3.数乘s为一实数,q为四元组,则有sq=qs4.共轭p=(w,v),则p*=(w,-v)(pq)*=q*p*N(q)=w2+x2+y2+z2q-1=q*/N(q)---------------显然可得qq-1=(1,0)二.使用四元数旋转向量假如有一表示向量的四元组q=(w,v),对其应用旋转量p后的结果为:q’=pqp-1=(w,v’)从上可以看出,计算的结果q’的实部和q的实部是相等的,并且有N(v)=N(v’)如果N(q)=1,则可以令q=(cosa,usina),u也为一个单位向量,则q’是q绕u旋转2a个弧度的结果假如S(q)表示q的实部,则有2S(q)=q+q*2S(pqp-1)= pqp-1+( pqp-1)*=pqp*+(pqp*)*=pqp*+pq*p*=p(q+q*)p*=2S(q)(这里由于p是单位四元数,所以有p-1等于p*)欧拉角到四元数的转换定义pitch, yaw, roll分别为绕X轴、Y轴、Z轴的旋转弧度float p = pitch * PIOVER180 / 2.0;float y = yaw * PIOVER180 / 2.0;float r = roll * PIOVER180 / 2.0;float sinp = sin(p);float siny = sin(y);float sinr = sin(r);float cosp = cos(p);float cosy = cos(y);float cosr = cos(r);this->x = sinr * cosp * cosy - cosr * sinp * siny;this->y = cosr * sinp * cosy + sinr * cosp * siny;this->z = cosr * cosp * siny - sinr * sinp * cosy;this->w = cosr * cosp * cosy + sinr * sinp * siny;normalise();三.使用matlab进行相关计算计算两个向量v1和v2之间的旋转量四元数p,使得v1应用p后到达v2假如v1转到v2的旋转轴为v,旋转角为theta,则q=[v*cos(theta/2)sin(theta/2)]Matlab代码:function q=vector2q(v1,v2)%..normalize....len1=sqrt(v1*v1');len2=sqrt(v2*v2');v1=v1/len1;v2=v2/len2;angle=v1*v2';axis=cross(v1,v2);alen=sqrt(axis*axis');axis=axis/alen;t=acos(angle);t=t/2;q(1)=axis(1)*sin(t);q(2)=axis(2)*sin(t);q(3)=axis(3)*sin(t);q(4)=cos(t);end计算出了q之后,可以获得对应的旋转矩阵,旋转矩阵的计算Matlab里面的矩阵是以列为主顺序的function r=q2rot(q)w=q(4);x=q(1);y=q(2);z=q(3);r=zeros(3,3);r(1,1)=1-2*y*y-2*z*z;r(1,2)=2*x*y+2*w*z;r(1,3)=2*x*z-2*w*y;r(2,1)=2*x*y-2*w*z;r(2,2)=1-2*x*x-2*z*z;r(2,3)=2*z*y+2*w*x;r(3,1)=2*x*z+2*w*y;r(3,2)=2*y*z-2*w*x;r(3,3)=1-2*x*x-2*y*y;r=r';end同时,也可以根据四元数来计算欧拉角function R=q2euler(q)w=q(4);x=q(1);y=q(2);z=q(3);t11=2*(w*x+y*z);t12=1-2*(x*x+y*y);R(1)=atan2(t11,t12);t2=2*(w*y-z*x);R(2)=asin(t2);t31=2*(w*z+x*y);t32=1-2*(y*y+z*z);R(3)=atan2(t31,t32);end计算出来的欧拉角rx,ry,rz,分别为绕X轴、Y轴和Z轴的旋转角,假如有:Rotq=q2rot(q)R=q2euler(q)[rotx roty rotz]=Rotation(R)可以发现Rotq==rotz*roty*rotx从这里可以看出,上面使用四元数这样计算出来的旋转矩阵的旋转顺序分别是X轴、Y轴和Z轴的ra=pi/4;qz=[0 0 -sin(ra) cos(ra)] %绕z旋转-90度qy=[0 sin(ra) 0 cos(ra) ] %绕y旋转90度qyz=qmult(qy,qz)r=q2euler(qyz)上面的r得出的结果为r = -1.5708 0.0000 -1.5708也就是说其几何意义变成先绕X轴旋转-90度,再绕Z轴旋转-90度,而根据qy和qz的相乘我们实际进行的操作却是先绕Z轴旋转-90度,再绕Y轴旋转90度,但是结果却是这两种操作等价,这说明由四元数到欧拉角可以有多个解两个四元数,假如它们的方向是相反的,用它们作用于向量得到的新向量的值仍然相等q1=[0.024666 -0.023954 0.504727 0.862594];arm=[-8.881719 6.037597 -2.36776];q2=-q1;rot1=q2rot(q1);rot2=q2rot(q2);v1=rot1*arm'v2=rot2*arm'上面计算出来的v1等于v2四元数的余弦值为它们的内积假如余弦值小于0,则需要将其中的一个取反,因为上面我们知道一个四元数和它的反方向的四元数对一个向量起相同的作用四元数的相乘,代表旋转的累积pq=p*q;rotp=q2rot(p);rotq=q2rot(q);rotpq=q2rot(pq);rotmul=rotp*rotq;这里rotpq与rotmul相等四. OGRE中Quaternion类的几个函数1.四元数到旋转向量void Quaternion::ToRotationMatrix (Matrix3& kRot) const1 - 2*qy2 -2*qz22*qx*qy -2*qz*qw2*qx*qz +2*qy*qw2*qx*qy + 2*qz*qw 1 - 2*qx2 -2*qz22*qy*qz -2*qx*qw2*qx*qz -2*qy*qw 2*qy*qz +2*qx*qw1 - 2*qx2 -2*qy22.旋转量到四元数根据1中的表格,有:4 *(1-qx2-qy2-qz2) = 1 + m00 + m11 + m22又qw2=1-qx2-qy2-qz2,可得4 *qw2= 1 + m00 + m11 + m22这里解qw必须保证1 + m00 + m11 + m22>=0,如果不是的话,就构造其他的等式来计算,OGRE中分成两种情况,一种是m00 + m11 + m22>=0,就可以直接先解出qw,否则的采用另外的等式计算3.Local axisVector3 xAixs(void) const;取得旋转矩阵的第一列,旋转矩阵和一个向量相乘的话,第一列的数据均和向量的x分量相乘Vecotr3 yAxis(void) const;取得旋转矩阵的第二列,旋转矩阵和一个向量相乘的话,第二列的数据均和向量的y分量相乘Vecotr3 zAxis(void) const;取得旋转矩阵的第三列,旋转矩阵和一个向量相乘的话,第三列的数据均和向量的z分量相乘。
在matlab和pythontf中的旋转变换(四元数、欧拉角、旋转矩阵等)

在matlab 和pythontf 中的旋转变换(四元数、欧拉⾓、旋转矩阵等)⽬录1. 基本的认识空间中的坐标变换包括平移和旋转。
平移变换较为简单,只需要加上⼀个位置⽮量即可。
旋转变换常见的有三种表⽰⽅式:旋转矩阵、欧拉⾓、四元数。
注:由于博主本⼈知识有限以及篇幅的缘故,博⽂⼗分简略,阅读本篇博客前需要⼀定的知识基础,有问题欢迎⼀起交流讨论。
2. 变换矩阵根据《机器⼈学导论》,我们⽤平移算⼦A P BO 和旋转算⼦A B R 进⾏变换矩阵的计算。
A P14×1=AB RA PBO014×4B P 14×11. 平移算⼦A P BO平移将空间中的⼀个点沿着⼀个已知的⽮量⽅向移动⼀定距离。
A PBO=q x q yq z 3×12. 旋转算⼦A B R通常是绕坐标系的x 、y 、z 轴旋转⼀定⾓度的旋转算⼦,遵循右⼿旋转法则。
例如:绕z 轴旋转θ⾓度的算⼦:A B R=cos θ−sin θ0sin θcos θ13×3具体原理的话可以参考原书,也可以参考,。
3. 欧拉⾓欧拉⾓⽤三个数描述从⼀个坐标系到另⼀个坐标系的变换,每个数分别是绕某⼀个坐标轴转动的⾓度。
⽹上对于欧拉⾓对应坐标轴的名称不是很统⼀,这⾥参考,所指的欧拉⾓是偏航、俯仰和滚转(yaw, pitch and roll ),分别对应z,y,x 轴的转⾓。
通常的欧拉⾓是intrinsic rotations ,⼜称内在旋转,动态旋转等,每次旋转参照的坐标系是旋转后的新坐标系,也可以理解为刚体坐标系。
⽽还有⼀种欧拉⾓是extrinsic rotations ,⼜称固定⾓,外在旋转,静态旋转等,每次旋转参照的坐标系是原始的固定坐标系,两者存在⼀⼀对应的关系,以下摘⾃维基百科:三个基本旋转可以围绕原始坐标系的轴发⽣,它保持不动(extrinsic rotations ,外在旋转),或者围绕旋转坐标系的轴,在每次基本旋转后改变其⽅向(intrinsic rotations ,内在旋转)。
4.6-4.7欧拉角和四元数表示

4.7 物体朝向的四元数表示和插值技术
. e i j k
e e i j k
i i -e -k j
j j k -e -i
k k -j i -e
即e作为乘法单位元,而i,j,k按i->j->k->i的次序,相邻两单位元按箭头顺 序相乘等于第三单位元,与箭头顺序反方向相乘则等于第三个单位元的负元.
计算机动画的算法基础
4.6 物体朝向的欧拉角表示和插值技术
4.7 物体朝向的四元数表示和插值技术
4.7.1 四元数的定义及基本性质
4.7.2 四元数、欧拉角、旋转矩阵之间的相互转换
任 歆
4.6 物体朝向的欧拉角表示和插值技术
物体朝向最常见的表示方法为欧拉角,如图:
4.6 物体朝向的欧拉角表示和插值技术
4.7.2 四元数、欧拉角、旋转矩阵之间的相互转换
4.7.2 四元数、欧拉角、旋转矩阵之间的相互转换
三个欧拉角对应的齐次旋转矩阵为
4.6 物体朝向的欧拉角表示和插值技术
复合成旋转矩阵
:
若不了解这个特定的次序,有可能得到和意愿不同的反转。
4.6 物体朝向的欧拉角表示和插值技术
欧拉角在应用中的缺点:
1.用欧拉角难以建立任意的朝向
2.在插值朝向时会带来问题
4.6 物体朝向的欧拉角表示和插值技术
“万向节死锁”现象,即自由度的突然丧失:
4.7 物体朝向的四元数表示和插值技术
满足乘法结合律,分配律,但是不满足交换律:
4.7 物体朝向的四元数表示和插值技术
刚体在三维空间的旋转(关于旋转矩阵、DCM、旋转向量、四元数、欧拉角)
刚体在三维空间的旋转(关于旋转矩阵、DCM、旋转向量、四元数、欧拉角)最近学习了一些关于三维空间旋转相关的知识,借此梳理一下备忘。
三维空间的旋转(3D Rotation)是一个很神奇的东东:如果对某个刚体在三维空间进行任意次的旋转,只要旋转中心保持不变,无论多少次的旋转都可以用绕三维空间中某一个轴的一次旋转来表示。
表示三维空间的旋转有多种互相等价的方式,常见的有旋转矩阵、DCM、旋转向量、四元数、欧拉角等。
本篇文章主要梳理一下这些表示方式及相互转换的方法。
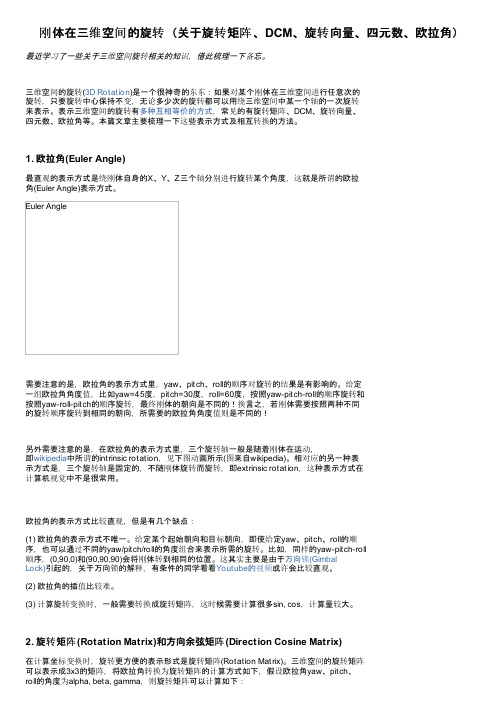
1. 欧拉角(Euler Angle)最直观的表示方式是绕刚体自身的X、Y、Z三个轴分别进行旋转某个角度,这就是所谓的欧拉角(Euler Angle)表示方式。
Euler Angle需要注意的是,欧拉角的表示方式里,yaw、pitch、roll的顺序对旋转的结果是有影响的。
给定一组欧拉角角度值,比如yaw=45度,pitch=30度,roll=60度,按照yaw-pitch-roll的顺序旋转和按照yaw-roll-pitch的顺序旋转,最终刚体的朝向是不同的!换言之,若刚体需要按照两种不同的旋转顺序旋转到相同的朝向,所需要的欧拉角角度值则是不同的!另外需要注意的是,在欧拉角的表示方式里,三个旋转轴一般是随着刚体在运动,即wikipedia中所谓的intrinsic rotation,见下图动画所示(图来自wikipedia)。
相对应的另一种表示方式是,三个旋转轴是固定的,不随刚体旋转而旋转,即extrinsic rotation,这种表示方式在计算机视觉中不是很常用。
欧拉角的表示方式比较直观,但是有几个缺点:(1) 欧拉角的表示方式不唯一。
给定某个起始朝向和目标朝向,即使给定yaw、pitch、roll的顺序,也可以通过不同的yaw/pitch/roll的角度组合来表示所需的旋转。
比如,同样的yaw-pitch-roll顺序,(0,90,0)和(90,90,90)会将刚体转到相同的位置。
threejs 欧拉角和四元数 转换

threejs 欧拉角和四元数转换【知识】三维图形编程中的欧拉角与四元数转换1. 引言在三维图形编程中,欧拉角和四元数是两种常见的旋转表示方法。
它们可以在计算机图形学、游戏开发等领域中用于描述物体的旋转。
本文将介绍欧拉角和四元数的概念和转换方法,以及它们在Three.js中的应用。
2. 欧拉角的定义和转换欧拉角是一种常用的旋转表示方法,它由三个角度组成,分别表示物体绕x、y、z轴旋转的角度。
在Three.js中,欧拉角可以通过Euler 类进行表示和转换。
2.1 欧拉角的定义在Three.js中,欧拉角可以使用以下方式定义:```var euler = new THREE.Euler(x, y, z, order);```其中,x、y、z是绕x、y、z轴旋转的角度,order是旋转的顺序。
常见的旋转顺序有"XYZ"、"YXZ"、"ZXY"等。
2.2 欧拉角的转换在Three.js中,欧拉角可以和旋转矩阵、四元数进行相互转换。
下面是欧拉角和旋转矩阵、四元数的转换方法:- 欧拉角转换为旋转矩阵:```var euler = new THREE.Euler(x, y, z, order);var matrix = newTHREE.Matrix4().makeRotationFromEuler(euler);```- 旋转矩阵转换为欧拉角:```var matrix = new THREE.Matrix4();var euler = new THREE.Euler().setFromRotationMatrix(matrix, order);```- 欧拉角转换为四元数:```var euler = new THREE.Euler(x, y, z, order);var quaternion = new THREE.Quaternion().setFromEuler(euler); ```- 四元数转换为欧拉角:```var quaternion = new THREE.Quaternion();var euler = new THREE.Euler().setFromQuaternion(quaternion, order);```3. 四元数的定义和转换四元数是一种用于表示旋转的数学工具,它由一个实部和三个虚部组成。
四元数转欧拉角奇异值问题

四元数转欧拉角奇异值问题四元数和欧拉角作为常见的表示方法,在计算机图形学和机器人领域中广泛应用。
在四元数表示角度时,存在着一些奇异值问题,会使得欧拉角的转换结果出现异常,本文将对此进行详细的阐述。
一、四元数简介四元数是一种扩充了实数的数学结构,它包括一个实数部分和三个虚数部分,可以表示旋转和剪切等变换。
四元数形式上可以写成 $q = w + xi + yj + zk$,其中 $w, x, y, z$ 都是实数,$i, j, k$ 是三个虚数单位,它们的平方分别等于-1。
四元数通过旋转的方式来表示角度。
例如,单位四元数可以表示3D中的转动180度绕轴 $(1,1,1)$,则可以写成:$$q = [\cos(\theta/2),\sin(\theta/2)\frac{1}{\sqrt{3}},\sin(\theta/2)\frac{1}{\sqrt{3}},\sin(\theta/2)\frac{1}{\sqrt{3}}]$$其中,$\theta$ 是旋转的角度。
二、欧拉角简介欧拉角是一种表示旋转的方式,它通过描述旋转的三个角度来确定旋转的方向。
欧拉角可以通过任何航向、俯仰、翻转(yaw-pitch-roll)的组合来表示。
例如,将 3D 物体绕 X 轴旋转30度,然后绕 Y 轴旋转45度,再绕 Z 轴旋转 60 度,这个过程可以用以下的欧拉角表示:$$\alpha = 30^\circ,\beta = 45^\circ,\gamma = 60^\circ$$当然,在欧拉角的表示中也存在固有的问题,例如欧拉角的万向锁问题等。
但是,在本文中,我们主要探讨的问题是四元数转为欧拉角时可能会遇到的问题。
三、四元数转换为欧拉角在将四元数转换为欧拉角时,我们可以首先计算对应的旋转矩阵,然后通过该矩阵计算欧拉角。
假设四元数为$q = [w, x, y, z]$,则相应的旋转矩阵可以表示为:$$\left[\begin{matrix} 1 - 2(y^2+z^2)& 2(xy-wz)& 2(xz+wy)\\ 2(xy+wz)& 1-2(x^2+z^2)& 2(yz-wx)\\ 2(xz-wy)& 2(yz+wx)& 1 - 2(x^2+y^2)\end{matrix}\right]$$根据四元数到旋转矩阵的转换方法,我们可以通过这个矩阵计算出欧拉角,例如:$$\alpha = \tan^{-1}(\frac{-m_{23}}{m_{33}})$$$$\beta = \sin^{-1}(m_{13})$$$$\gamma = \tan^{-1}(\frac{-m_{12}}{m_{11}})$$其中 $m_{ij}$ 表示旋转矩阵中的第 $i$ 行第$j$ 列的元素。
旋转矩阵 旋转向量 欧拉角 四元数 转换关系

旋转矩阵旋转向量欧拉角四元数转换关系示例文章篇一:《探索神奇的空间姿态表示法》嘿,同学们!你们有没有想过,我们生活的这个世界,各种东西的位置和方向是怎么被描述的呢?今天我要跟你们说一说旋转矩阵、旋转向量、欧拉角还有四元数这些神奇的东西,以及它们之间的转换关系。
先来说说旋转矩阵吧!这就好像是一个超级魔法方阵。
比如说,我们有一个小方块,想要让它在空间里转一转,旋转矩阵就能告诉我们这个小方块的每个点会跑到哪里去。
这难道不神奇吗?就像我们在玩拼图,每一块都有它特定的位置,而旋转矩阵就是那个能决定它们位置的神秘力量!那旋转向量又是啥呢?想象一下,有一根魔法棒,轻轻一挥,就能指出物体旋转的方向和大小。
这根魔法棒就是旋转向量啦!它就像是给物体的旋转指了一条明确的道路。
再讲讲欧拉角,这就像是给空间里的物体定了三个角度的规矩。
就好比我们调整玩具飞机的机头、机翼和机身的角度,让它能按照我们想要的方式飞行。
最后是四元数,哎呀,这可有点复杂啦!它就像是一个神秘的密码,能更巧妙地描述物体的旋转。
那它们之间到底有啥转换关系呢?这就好比不同的钥匙开不同的锁。
有时候我们需要用旋转矩阵来解决问题,那就得把其他的表示方法转换成旋转矩阵;有时候四元数更方便,那又得把其他的变成四元数。
比如说,我们在玩一个电脑游戏,里面的角色要做各种动作。
如果用错了表示方法,那角色可能就会乱转,这游戏不就玩砸啦?老师给我们讲这些的时候,我一开始真是一头雾水,心里想:“这都是啥呀,怎么这么难!”但是后来,经过不断地思考和练习,我好像慢慢摸到了一些门道。
我还和同桌一起讨论呢,我问他:“你能明白这旋转矩阵吗?”他摇摇头说:“太难啦,我感觉脑子都要转晕啦!”我们俩互相鼓励,一起努力去搞懂这些神奇的东西。
同学们,你们说,数学世界是不是充满了这样神奇又有趣的知识?我们可不能被它们吓倒,要勇敢地去探索!我的观点就是,虽然这些知识一开始很难,但只要我们用心去学,多思考多交流,就一定能掌握它们,让它们为我们所用!示例文章篇二:《神奇的数学世界:旋转那些事儿》嘿!同学们,你们知道吗?在数学的奇妙世界里,有好多让人头疼又着迷的东西,就比如说旋转矩阵、旋转向量、欧拉角还有四元数!这可真是太有趣啦!先来说说旋转矩阵吧!这就像是一个魔法盒子,里面装着好多数字的秘密。
全角度欧拉角与四元数转换的方法

全角度欧拉角与四元数转换的方法1.全角度欧拉角转换为四元数:首先将全角度欧拉角分别转换为弧度制,即将α、β和γ用π表示的弧度表示。
然后,根据以下公式计算四元数的各个分量:q0 = cos(α/2) * cos(β/2) * cos(γ/2) + sin(α/2) *sin(β/2) * sin(γ/2)q1 = sin(α/2) * cos(β/2) * cos(γ/2) - cos(α/2) *sin(β/2) * sin(γ/2)q2 = cos(α/2) * sin(β/2) * cos(γ/2) + sin(α/2) *cos(β/2) * sin(γ/2)q3 = cos(α/2) * cos(β/2) * sin(γ/2) - sin(α/2) *sin(β/2) * cos(γ/2)2.四元数转换为全角度欧拉角:首先,计算旋转矩阵的元素,其中旋转矩阵由以下公式得到:R(0,0)=q0^2+q1^2-q2^2-q3^2R(1,0)=2(q1q2+q0q3)R(2,0)=2(q1q3-q0q2)R(2,1)=2(q2q3+q0q1)R(2,2)=q0^2-q1^2-q2^2+q3^2然后,根据以下公式计算全角度欧拉角:β = asin(-R(2,0))α = atan2(R(2,1)/cos(β), R(2,2)/cos(β))γ = atan2(R(1,0)/cos(β), R(0,0)/cos(β))需要注意的是,在进行欧拉角与四元数之间的转换时,存在一种现象称为万向锁(Gimbal Lock)。
当旋转矩阵的一些元素接近正弦值为1或-1时,会导致计算出的欧拉角存在不确定性。
为了避免这种情况的发生,可以在转换之前,对旋转矩阵的元素进行检测,并进行修正。
综上所述,全角度欧拉角与四元数之间的转换方法比较复杂,但是在实际应用中是非常实用的。
这两种表示方法各有优劣,可以根据具体需求选择适合的方式进行旋转表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四元数,欧拉角,矩阵的相互转换
网上太多的将转换的了,翻来覆去转载没有意义。
奉上源码,TC下直接编译即可~~在附上编译好了的exe可以直接下载运行~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~不华丽的分割~~以下是源码~~~~~~~~~~~~~~~~~~~~~~
/* 输入欧拉角,能看到四元数,以及再转换回去成欧拉角Yaw范围(-180~180)Pitch范围(-90~90)Roll范围(-180~180)*/
#include "stdio.h"#include "math.h"#include
"conio.h"main(){float theta_z , theta_y ,theta_x ;float
cos_z_2;float cos_y_2;float cos_x_2;float sin_z_2;float
sin_y_2;float sin_x_2;float Pitch;float Roll;float Yaw;float
Q[4];float T[3][3];do{printf("/nYaw =
");scanf("%f",&theta_z);printf("/nPitch =
");scanf("%f",&theta_y);printf("/nRoll =
");scanf("%f",&theta_x);theta_z =
theta_z*3.1416/180;theta_y = theta_y*3.1416/180;theta_x = theta_x*3.1416/180;cos_z_2 = cos(0.5*theta_z);cos_y_2
= cos(0.5*theta_y);cos_x_2 = cos(0.5*theta_x);sin_z_2 = sin(0.5*theta_z);sin_y_2 = sin(0.5*theta_y);sin_x_2 =
sin(0.5*theta_x);Q[0] = cos_z_2*cos_y_2*cos_x_2 +
sin_z_2*sin_y_2*sin_x_2;Q[1] = cos_z_2*cos_y_2*sin_x_2 - sin_z_2*sin_y_2*cos_x_2;Q[2] = cos_z_2*sin_y_2*cos_x_2 + sin_z_2*cos_y_2*sin_x_2;Q[3] =
sin_z_2*cos_y_2*cos_x_2 -
cos_z_2*sin_y_2*sin_x_2;printf("/nQ=[ %f %f %f %f]/n/n",Q [0],Q[1],Q[2],Q[3]) ;printf("alpha
= %f/n/n",acos(Q[0])*2*180/3.1416) ;T[0][0] =
Q[0]*Q[0]+Q[1]*Q[1]-Q[2]*Q[2]-Q[3]*Q[3] ;T[0][1] =
2*(Q[1]*Q[2]-Q[0]*Q[3]);T[0][2] =
2*(Q[1]*Q[3]+Q[0]*Q[2]);T[1][0] =
2*(Q[1]*Q[2]+Q[0]*Q[3]);T[1][1] =
Q[0]*Q[0]-Q[1]*Q[1]+Q[2]*Q[2]-Q[3]*Q[3] ;T[1][2] =
2*(Q[2]*Q[3]-Q[0]*Q[1]);T[2][0] =
2*(Q[1]*Q[3]-Q[0]*Q[2]);T[2][1] =
2*(Q[2]*Q[3]+Q[0]*Q[1]);T[2][2] =
Q[0]*Q[0]-Q[1]*Q[1]-Q[2]*Q[2]+Q[3]*Q[3] ;printf("T[0][0]
= %9f,T[0][1] = %9f,T[0][2]
= %9f/n",T[0][0],T[0][1],T[0][2]);printf("T[1][0] = %9f,T[1][1] = %9f,T[1][2] = %9f/n",T[1][0],T[1][1],T[1][2]);printf("T[2][0]
= %9f,T[2][1] = %9f,T[2][2]
= %9f/n/n",T[2][0],T[2][1],T[2][2]);Pitch = asin(-T[2][0]);Roll = atan( T[2][1]/T[2][2]);Yaw =
atan( T[1][0]/T[0][0]);if(T[2][2]{if(Roll {Roll =
Roll+3.1416;}else{Roll =
Roll-3.1416;}}if(T[0][0]{if(T[1][0]>0){Yaw = Yaw +
3.1416;}else{Yaw = Yaw - 3.1416;}}printf("Yaw = %f/nPitch = %f/nRoll
= %f/n",Yaw*180/3.1416,Pitch*180/3.1416,Roll*180/3.141 6) ;}while(1);printf("Hello, world/n");getch();}。