点光源跟踪系统设计方案
点光源跟踪系统(四路)

电子设计报告点光源跟踪系统(B题)组员:樊华姚文涵沈洁学校:南京师范大学中北学院专业:电子信息工程指导老师:朱晓舒目录摘要 (3)关键词 (3)一、引言 (4)二、系统方案选择与论证 (5)2.1各种方案设想及论证、优缺点 (5)2.1.1 光敏元件选择方案 (5)2.1.2 光源检测方案 (6)2.1.3 传感器布局方案 (7)2.1.4光电跟踪系统前置放大电路方案 (7)2.1.5 外界环境干扰及其消除方案 (8)三、理论分析与计算 (8)3.1 LED亮度可调电路的理论分析与计算 (8)3.2光电跟踪系统前置放大电路理论分析与计算 (9)四、电路与程序设计 (11)4.1系统的硬件设计 (11)4.1.1微处理和微控制系统单片机 (11)4.1.2电机类型选择 (11)4.1.3系统供电电源设计 (11)4.1.4点光源LED亮度可调电路 (12)4.1.5 光电跟踪系统前置放大电路(跨阻放大器) (12)4.1.6步进电机驱动电路 (12)4.1.7 机械部分的设计 (12)4.1.8系统总体硬件电路框图 (13)4.2系统的软件设计 (13)4.2.1 软件设计总体思想 (13)4.2.2 系统软件结构设计框图 (13)五、测试方案、结果及分析 (15)六、部分设计亮点及调试难点解决方案 (16)6.1 硬件电路设计创意 (16)6.2 用光的特性(直线性)设计检测方法,进行位置精确定位 (16)6.3 软件部分控制精髓 (17)七、总结 (17)八、结束语 (17)九、附录 (18)附录一:系统+12V、+5V供电电源电路图 (18)附录二:LED亮度可调电路 (18)附录三:光源跟踪系统前置放大电路(I-V转换电路) (19)附录四:TLV1544 AD转换电路 (19)附录五:步进电机驱动电路图 (19)附录六:整机系统相关电路图 (20)附录七:整机系统实物图 (20)十、参考文献 (21)摘要本设计以TI公司的超低功耗MCU MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,该光源跟踪系统能够跟踪点光源位置并由激光笔尽快指向点光源的光电方式定位,以考核光源跟踪系统跟踪点光源的灵敏度以及激光瞄准点光源的精确性来评判设计完成指标。
基于MSP430的点光源跟踪系统的设计
中图分类号:TP311 文献标识码:A 文章编号:1009-2552(2010)11-0160-03基于M SP430的点光源跟踪系统的设计朱丽霞(常州轻工职业技术学院,常州213164)摘 要:系统是以T I公司的超低功耗M C U M SP430为核心,利用光敏二极管排列成矩阵对摄像头采集点光源在液晶屏所成的像进行采样,经过单片机运算后适时的调整和控制步进电机来实现工作台X/Y方向移动,以达到精确定位的目的。
经过实际的参数的测试和分析,验证了系统的可行性和有效性。
关键词:M SP430;跟踪;光敏检测;步进电机控制;摄像头Desi gn of tracki ng syste m for a poi nt source based on M SP430Z HU Li x ia(Changzhou Institu te of L igh t I ndu stry T echnology,Changzhou213164,Ch ina) Abstract:A point source fro m the ca m era LCD screen is captured using Pho tod i o des arranged i n a m atrix i n to the i m age of the sa m p le i n th is desi g n syste m tak i n g ultra l o w-po w er MCU M SP430.The stepper m otor is adjusted ti m e l y and controlled to achieve the tab le X/Y d irecti o n i n order to ach ieve the purpose of precise position i n g after the m icr ocontr o ller operati o n.A fter the act u al test and analysis of para m eters,the feasi b ility and effecti v eness of the syste m is verified.Key words:MSP430;track i n g;sensitive detecti o n;stepper mo tor con tro;l ca m era0 引言文中设计的系统是源自于2010年T I杯江苏省电子设计大赛,要求是设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
点光源跟踪系统的研究

点光源跟踪系统的研究[摘要] 本系统采用MSP430F2274作为控制核心,通过键盘修改参数,全面实现了题目中的基本要求和发挥部分要求。
建立二维坐标,使用两个舵机分别控制随动系统垂直方向和水平方向,使得激光笔能够更加快速准确的指向光源,尤其是当光源沿直线运动时。
当光源移动30cm时,随动系统能够快速自动找到光源。
[关键词] MSP430 随动系统实时跟踪伺服电机一、方案比较与论证本设计要求实现随动系统能够定点找到光源,随动追踪光源,光源沿弧线和直线运动时均能够找到光源等。
根据题目要求,本系统由单片机、LED光源、捕获光强、放大电路、舵机等五个模块构成,各模块经过多个方案的比较与论证,最终提出了使系统最优化的整个系统方案。
系统总体框图如图B-1所示。
1、捕获光强系统模块捕获光强系统模块主要由光敏三极管、激光笔组成。
方案一:一维随动系统,采用一个光敏三极管和一个激光笔的方式。
如图B-2所示。
G为光敏三极管J为激光笔光敏三极管G位于激光笔J的上方,两者在垂直方向处于同一直线上,以光敏三极管为中心可水平转动。
初始调整位置时,光敏三极管的轴线与激光笔的轴线要相交于光源B。
光敏三极管接收来自光源B的光照,如图B-3。
首先找到让光敏三极管扫描一次,得到最大电压值Um,从而找到最大的光强位置,即光源。
当光源发生移动时,光敏三极管接收到的光强减小,此时控制随动系统跟踪光源的运动方向进行移动。
此方案电路简单,容易调整三极管和激光笔的初始位置。
但是光源沿直线运动时,光敏三极管和激光头的轴线不可能交与一点,导致跟踪光源时出现偏差。
由于随动系统只能水平转动不能垂直转动,导致当光源沿直线LM移动时,激光笔不能准确的指向光源,存在固有误差图B-3三极管接受光源示意图方案二:二维随动系统。
采用四个光敏三极管成十字形排列,一个激光笔位于十字中心。
如图B-4所示。
图B-4方案二其中采用一个伺服电机控制L和R两个光敏三极管三极管用于沿水平方向捕获光强,另一个伺服电机控制S和X用于沿垂直方向捕获光强,最终寻找的光源位置为水平扫描和垂直扫描的交点。
基于LM3S811单片机的LED点光源跟踪系统的设计

Ke o d y w r s: L 3 1sn l—hp m ir c mp tr ED p i ts u c ;a t mai rc n y tm ;lsr p n M S8 igec i c o o u e ;L on o re u o t ta kig s se 1 c ae e
t s t he ys em c m akc he as r an t l e pe m ove n a l n i l di e tons r ci qui ckl a y nd c ntnuous y t r lz t o i l o ea i e he
t a k n o t e p i O r e w h n h o nt S U C o e l w l n s o hl a o g a c r l n r c i g f h o nt S U C e t e p i O r e m v s s o Y a d mo t y l n ic e a d s r i ht ln i a c r a n n l n it n e. t a g i e 1 e t i a g e a d d s a c 3 _
设 计 并实 现 了 ‘ 点光 源 自动 跟踪 系 统 . 个
崔 鸣 ,尚 丽
( 州 市职 业 大 学 电子信 息工 程 系 ,江 苏 苏州 2 5 0 ) 苏 1 14
摘
要 : 以T公 司的超低功耗 M U M S 1 单 片机 为核 心控 制 器, I C L 6 8 1 设计 并制作 了一 个L D E 点光 源 自
基于单片机msp430的点光源跟踪系统设计
基于msp430的点光源跟踪系统设计周小军 何志龙 武小栋摘要 本设计采用MSP430F149 单片机作为整个系统的控制核心,利用4个光敏三极管来接收点光源发出的光并将检测到的信号放大后传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的位置,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于传感器中间的激光笔将精确的指向点光源。
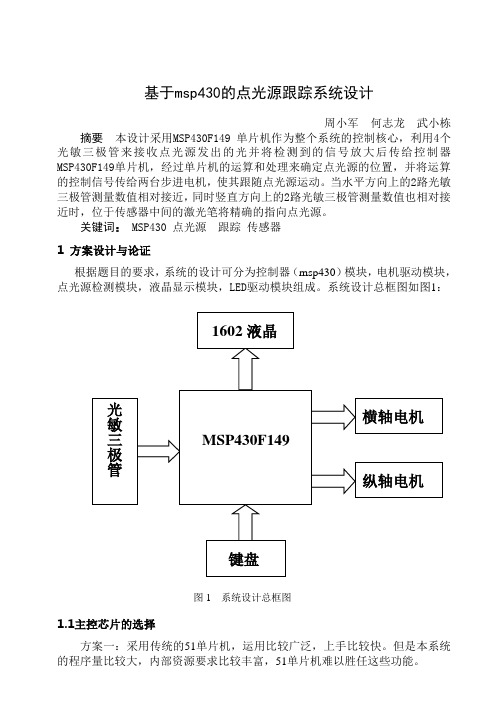
关键词: MSP430 点光源 跟踪 传感器1 方案设计与论证根据题目的要求,系统的设计可分为控制器(msp430)模块,电机驱动模块,点光源检测模块,液晶显示模块,LED 驱动模块组成。
系统设计总框图如图1:1.1主控芯片的选择 方案一:采用传统的51单片机,运用比较广泛,上手比较快。
但是本系统的程序量比较大,内部资源要求比较丰富,51单片机难以胜任这些功能。
光敏三极管键盘MSP430F149 1602液晶纵轴电机 横轴电机 图1 系统设计总框图方案二:采用MSP430F149低功耗单片机,其I/O口资源丰富,有12位AD转换、16位定时器、精密的比较器等,信息处理功能强大,能够很好的实现系统的要求。
故选择此方案。
1.2电动机的选择本系统电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
方案二:直流减速电机。
此电机在正常通电状态下,转速平稳,角度的变化也近乎连续,控制简单方便。
根据设计的要求可知,直流减速电机的速度不容易控制,而步进电机的控制和实现相对简单一些。
因而选用方案一。
1.3电动机驱动方案的选择本系统中选的是步进电机,步进电机驱动有一下三种方案可选择:方案一:采用功率三极管作为功率放大器的控制步进电机。
点光源跟踪设计报告

“点光源跟踪系统”的设计与实现摘要:本点光源跟踪系统由MSP430F5438单片机、bh1750fvi-e光强传感器,LED 灯和云台等组成闭环控制系统,主要模块有LED驱动电路模块、云台控制模块和光能检测模块。
在芯片TPS61062控制的驱动电路作用下产生电流可调的点光源,通过光能检测模块比较各方位光照强度,控制不同继电器的导通从而控制云台向某个方向转动,实现追光功能。
而且,需要校准时也可以用红外进行手动调节。
关键词:MSP430单片机,光能检测,云台控制“The point source Tracking System” 的设计与实现Abstract:The point source tracking system by the MSP430F5438 MCU, bh1750fvi-e light intensity sensors, LED lights and head composed of closed-loop control system, the main module has LED driver circuit module, PTZ control module and the light detection module. TPS61062 chip under the control of drive circuit produces current adjustable light source, light detection module by the parties to place light intensity compared to control conduction of different relays to control head rotation in a certain direction, to achieve functional recovery of light. Moreover, the need for calibration can also be adjusted manually using infrared.Key Words:MSP430 microcontroller, light detection, PTZ control一、方案比较与论证1、LED驱动模块的方案比较与论证方案一:用电源直接在LED的两端加一个电压使LED发光,但这样需要一个可调电压源,通过调节电压来改变LED的电流,从而实现亮度的调节,由于电压的调节很难实现精确的步进,使得这种调节方式线性度很差,给我们监测电流造成了一定的难度,而且这种方案容易损坏LED灯,故未采用此方案。
-》基于光敏技术的点光源跟踪系统的设计

基于光敏技术的点光源跟踪系统的设计夏淑丽张江伟(徐州工业职业技术学院,江苏徐州221140)摘要本系统以MSP430F4270单片机为控制核心,用光敏电阻作为光源检测传感器,舵机构成执行机构,以舵机驱动激光笔水平或上下移动;由单片机根据光源传感器的信号,采用PID算法输出PWM波控制舵机带动激光笔指向光源。
关键词MSP430F4270LM358TLV1117-3.3reg1117光敏电阻中图分类号TP23文献标识码B文章编号1000-3932(2011)03-0291-03在太阳能电池、太阳能热水器等很多领域中都要对光源进行跟踪,这样做能够使太阳能设备的工作效率、能量吸收率更高。
笔者利用激光笔对点光源进行跟踪,其原理和自动跟踪太阳能设备是一样的。
笔者以1W白光LED作为光源,固定在一支架上。
且LED的电流能够在150 350mA范围内调节。
在一定角度、范围内移动支架,且确保光源跟踪系统中的激光笔可以通过现场设置参数的方法尽快指向点光源。
1方案设计1.1方案分析由于光源为1W白色LED,为使其稳定工作,最好使用恒流源供电;要实现跟踪装置且要检测光照强度判断光源的位置,因此光电传感器的选择也尤为重要。
①1.2设计方案选择1.2.1恒流源的选择对于恒流源电路,本设计选用LM358芯片构成恒流源。
LM358内部包括有两个独立的、高增益、内部频率补偿的双运算放大器。
电源电压范围宽,单电源(3 30V),双电源(ʃ1.5 ʃ15V)低功耗电流,低输入偏流、输入失调电压和失调电流,使用更灵活[1]。
1.2.2光敏器件的选择光敏器件包括光敏二极管、光敏三极管及光敏电阻等。
其中光敏电阻是利用光的入射引起半导体电阻的变化来进行工作的。
光敏电阻属半导体光敏器件具有灵敏度高、光谱响应范围宽、重量轻、机械强度高、耐冲击、抗过载能力强、耗散功率大以及寿命长等特点[2]。
同时考虑到本设计需要实现元器件在结构上的连续排列,因此本设计采用光敏电阻。
点光源跟踪系统课程设计
实用文档指导教师评定成绩:审定成绩:重庆邮电大学自动化学院计算机控制技术课程设计报告设计题目:光源随动系统单位(二级学院):学生姓名:专业:班级:学号:指导教师:设计时间: 2013 年 6 月重庆邮电大学自动化学院制摘要本设计给出了一种基于单片机的点光源自动跟踪系统设计方案, 该设计使用TI公司的超低功耗的AT89C52单片机作为整个系统的控制核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
利用8路光敏电阻来检测点光源的位置并将检测到的信号经过放大后进行AD转换,将转换的结果传给控制器AT89C52单片机,经过过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号控制两台步进电机,使其跟随点光源运动。
本设计可以扩展为以后的太阳能发电的自动跟踪系统。
该系统不仅能自动根据太阳光方向来调整太阳能电池板朝向, 结构简单、成本低, 而且在跟踪过程中能自动记忆和更正不同时间的坐标位置, 不必人工干预, 特别适合天气变化比较复杂和无人值守的情况, 有效地提高了太阳能的利用率, 有较好的推广应用价值。
关键词:AT89C52单片机、光源、自动跟踪、传感器目录摘要.................................... 错误!未定义书签。
目录.. (3)一设计题目 (4)1.1 基于单片机的光源自适应控制系统设计 (4)1.2 设计要求 (4)二设计报告正文 (5)2.1 设计方案总体方向的选择 (5)2.1.1 系统方案的拟定 (5)2.1.2 方案选择 (5)2.2 硬件电路的设计 (6)2.2.1 A/D转换模块 (6)2.2.2 步进电机模块 (9)2.2.3 电机驱动模块 (11)2.2.4 检测模块 (13)2.2.5 单片机模块 (14)2.3 系统软件设计 (18)三总体调试 (19)3.1 总体调试 (19)3.2 问题及解决方案 (19)3.2.1 通道比较阀值的设置 (19)3.2.2 电机的防抖 (19)四设计总结 (20)五参考文献 (21)六附录 (22)一、设计题目1.1基于单片机的光源自适应控制系统设计设计一控制系统,假设有一个太阳能电池板,为了使电池板最大限度的接受光照强度,通过控制器调节电池板的角度使电池板始终正对光线。
点光源跟踪器系统设计
点光源跟踪系统组员:王立冬卢晓文许甲海摘要:本文设计的是一个点光源跟踪系统,主要由光敏三极管的照度检测与处理,控制器分析与处理,执行机构运行和液晶显示模块这几个部分构成。
整个系统是以LM3S1138为控制核心,通过八个个光敏三极管来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度,以达到跟踪光源的效果。
关键词:点光源定位,二维运动分析,LM3S1138一、系统方案设计与论证1.主控芯片根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:方案一:MSP430系列单片机。
16位低功耗单片机,性能良好。
方案二:Cortex-M3系列。
具有32位处理器内核的高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。
本系统选取Cortex-M3系列的LM3S1138作为控制器,LM3S1138支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案二。
2.传感器的选择本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:硅光电池。
硅光电池是一种直接把光能转换为电能的半导体器件,根据硅光电池光照强度曲线特性可知,硅光电池的开路电压或短路电流与光强成很好的线性关系。
方案三:光敏二极管。
光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
方案四:光敏三极管。
原理与光敏二极管相同,但是与光敏二极管相比,它具有很大的光电流放大作用,即很高的灵敏度,因此传感器选择方案四。
3.电机的选择电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。
点光源跟踪器
点光源跟踪器【摘要】:本点光源跟踪器主要组成模块有主控制模块、光照检测模块、光驱动模块、继电器控制模块等。
主要芯片是MSP430F4270单片机、白光驱动TPS61062、光敏三极管3DU33、运放TLV2711和云台激光笔等组成的系统。
能够实现跟踪点光源的功能。
在1W的白光LED光照条件下,光能检测模块将光强转换为电压,单片机的SD 对电压采样比较,然后选择输出高电平。
这个高电平会使相应的继电器工作,则云台转动,使光电检测部分指向点电源的正确位置。
一、系统方案方案一:采用目前比较通用的51系列单片机。
此单片机的运算能力强,软件编程灵活,自由度大。
虽然该系统采用单片机为核心,能够实现对外围电路的智能控制部件。
由于光强度的变化是微小的变化,单片机为达到设计精度的要求,外围电路必须加上12位的A/D,这使得整个系统硬件电路变得复杂,而且12位的A/D器件价格较高,使得系统的性价比偏低。
方案二:采用TI的16位MSP430F4270单片机。
此单片机功能较强、兼容性好、性价比高;易扩展、可靠性、功耗小以及具有较高的数据处理和运算能力,系统时钟频率高,运行速度快,而且由于MSP430F5438单片机内部集成了16位的SD模/数转换器,不需外加模/数转换器,就可以很精确地将光强度的变化转换为电压值。
通过采样取样,结合内部A/D,构成闭环反馈调整控制。
此种方案既能实现智能化的特点,简化硬件电路,提高测量精度,同时也能利用软件对测量误差进行补偿,这给调试、维护和功能的扩展,性能的提高,带来了极大的方便。
鉴于上面考虑,我们采用第二个方案。
根据题目要求系统框图如下:图1系统框图系统工作原理:系统是由主控制模块、光照检测模块、光驱动模块、继电器控制模块等组成。
打开电源,操作单片机使白光LED 在300mA 下工作,用两对光敏三极管分别监测左右,上下的光强信号。
光电采集模块将光度强弱信号转换为电压值(三极管感应到的光度越强则采样的电压会越大),然后单片机16位的SD 对其中一对电压采样并比较两值的大小,当这两个电压值之差超过一定的门限,这时单片机输出高低电平,控制继电器的工作,使云台向光度强的方向运动。
5-点光源跟踪系统(LM3S1138 TPS61087 光敏三极管 步进电机 激光笔 点光源跟踪)

摘要:本设计以TI 的LM3S1138处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,当LED 光源在圆弧或直线上运动时,检测模块检测信号后经过放大滤波送入LM3S1138进行处理,用电机驱动模块控制检测模块在水平和竖直方向上的旋转使激光笔指示光源位置,即实现点光源跟踪。
系统主要由四个模块构成:LED 驱动模块、检测及其转换模块、LM3S1138处理模块和电机控制模块。
其中用TPS61087驱动LED,光敏三极管检测光照强度,由两个步进电机分别控制激光笔水平和竖直方向上的旋转。
关键字:LM3S1138 TPS61087 光敏三极管 步进电机 激光笔 点光源跟踪一 系统方案根据题目的要求,设计任务是通过使用光敏器件检测光照强度来判断光源的位置并用激光笔指示光源的位置。
为了完成上述功能,将整个系统设计为两个模块,点光源模块和指示光源模块。
整个系统的总体框图如图1-1所示:图1-1 系统总体框图1.1 LED 驱动模块方案选择与论证方案一:采用LM317做LED 驱动模块。
LM317是三端可调正稳压器集成电路,它的输出电压范围是1.2V 至37V ,负载电流最大为1.5A 。
由LM317构成的驱动电路简单,但功耗较大,而且要注意散热问题。
方案二:采用TPS61087做LED 驱动模块。
TPS61087是具有强制PWM 模式的650kHz/1.2MHz 升压DC-DC 转换器,输入电压范围为2.5~6V ,输出电压可高达18.5V 。
采用TPS61087的驱动电路的输出电流可达500mA 以上,足够用来驱动150~350mA 范围的白光LED 。
因此本设计采用方案二。
1.2 光敏传感器的选择与论证LED 驱动模块 光敏三极管检测模块放大模块 滤波模块LM3S1138 处理模块步进电机 控制模块 按键控制方案一:采用光敏电阻检测光照强度。
它在强光照射下光电转换线性较差,频率响应很低。
方案二:采用光敏二极管检测光照强度。
基于51单片机点光源自动跟踪系统设计
指导教师评定成绩:审定成绩:重庆邮电大学自动化学院综合设计报告设计题目:基于单片机的光源自适应控制系统设计单位(二级学院):自动化学院学生姓名:专业:自动化班级:学号:指导教师:蒋建春设计时间: 2012 年 10 月重庆邮电学院自动化学院制摘要本设计给出了一种基于单片机的点光源自动跟踪系统设计方案, 该设计使用TI公司的超低功耗的AT89C52单片机作为整个系统的控制核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
利用8路光敏电阻来检测点光源的位置并将检测到的信号经过放大后进行AD转换,将转换的结果传给控制器AT89C52单片机,经过过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号控制两台步进电机,使其跟随点光源运动。
本设计可以扩展为以后的太阳能发电的自动跟踪系统。
该系统不仅能自动根据太阳光方向来调整太阳能电池板朝向, 结构简单、成本低, 而且在跟踪过程中能自动记忆和更正不同时间的坐标位置, 不必人工干预, 特别适合天气变化比较复杂和无人值守的情况, 有效地提高了太阳能的利用率, 有较好的推广应用价值。
关键词:AT89C52单片机,光源,自动跟踪,传感器目录摘要............................................... 错误!未定义书签。
目录. (3)一设计题目 (4)1.1 基于单片机的光源自适应控制系统设计 (4)1.2 设计要求 (4)二设计报告正文 (5)2.1 设计方案总体方向的选择 (5)2.1.1 系统方案的拟定 (5)2.1.2 方案选择 (5)2.2 硬件电路的设计 (6)2.2.1 A/D转换模块 (6)2.2.2 步进电机模块 (9)2.2.3 电机驱动模块 (11)2.2.4 检测模块 (13)2.2.5 单片机模块 (14)2.3 系统软件设计 (18)三总体调试 (19)3.1 总体调试 (19)3.2 问题及解决方案 (19)3.2.1 通道比较阀值的设置 (19)3.2.2 电机的防抖 (19)四设计总结 (20)五参考文献 (21)六附录 (22)一、设计题目1.1基于单片机的光源自适应控制系统设计设计一控制系统,假设有一个太阳能电池板,为了使电池板最大限度的接受光照强度,通过控制器调节电池板的角度使电池板始终正对光线。
2-点光源跟踪

点光源跟踪系统摘要:本系统是以单片机的最小系统为控制核心,分为点光源、信号采集、信号放大、步进电机和人机交互模块等部分。
该系统通过控制步进电机正反转来追踪在一定范围内移动的点光源;当支架用手动方式沿着以跟踪系统为圆心、半径r约173cm的圆周在不大于±45º的范围内移动,也可以沿直线以该圆的一个切线移动,该追踪系统都能锁定点光源的位置。
一、方案论证和比较a)信号采集元件的选择方案一:利用光敏电阻在不同光照强度下电阻阻值随光照强度的增强而减小的原理来提取信号。
光敏电阻比较稳定,能够很好的把光信号转变为电信号,而且经济适用;但其反应不够灵敏,而且受周围环境温度的影响比较大。
方案二:使用光敏二极管作为采光元件。
当遇到外界光照时,光敏电阻内PN结的电子和空穴会增多从而其值会下降。
它感光性能良好,稳定而且反应速度快;但是其电流值太小,不便于信号的提取,后级需要很大的信号放大,这样就导致误差增大。
方案三:使用光敏三极管作为信号提取原件。
光敏三级管不仅采光性能灵敏稳定,而且其本身就具备电流放大作用;如果仍不能达到要求可以使用达林顿光敏三极管来放大电流。
综合考虑上述三种方案,我们最终选择方案三。
b)电机的选择电机是整个系统的动力源,而题目并没有规定使用何种电机,所以在系统设计之初首先面临的一个问题便是选用什么电机。
方案一:采用直流电动机。
直流电机输出功率大,带负载能力强,驱动电路简单,但精确控制直流电机转动角度不易实现。
方案二:使用步进电机,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
给电机加一个脉冲信号,电机就转过一个步距角,具有较强的快速启停能力。
其控制特性如图所示。
θ= ck ,其中θ为步进电机的角位移量,k 为脉冲数, c 为常数。
这一线性关系的存在,使得步进电机只有周期性的误差而无累积误差,这一特性是整个系统方案的基础。
我们采用的是四相八拍步进电机。
C)电机驱动模块的选择方案一:直接用单片机输出四相脉冲来控制L298驱动步进电机正反转,当顺序为A-B、B、B-C、C、C-D、D、D-A时,步进电机正转,当顺序为A-D、D、D-C、C、BC-B、B-A、A时步进电机反转。
点光源跟踪系统设计报告
点光源跟踪系统设计报告____年湖北赛区点光源跟踪系统设计报告点光源跟踪系统(B题)方案设计报告摘要:本方案使用TI公司生产的MSP430F247为主控芯片,以TPS61062为核心设计了白光LED驱动电路,应用OPA2335作放大器制作了光源检测电路。
本系统利用以激光笔为中心水平和垂直方向上对称分布的四个光敏三极管为探测端接收光源信号,再利用自适应环境算法、电机分段调速等多种算法实现激光束对白光光源的实时跟踪。
本系统成功完成了基础部分和发挥部分的要求,最终定位误差可控制在1.5cm以内。
关键字: 减速步进电机控制 LED电流控制自适应算法一、系统方案的选择1. 系统测光部件的选择方案一:以四个光敏电阻为探测端分别对称分布于激光笔水平和垂直方向上,中心处即激光束发光点。
利用光敏电阻在不同光强下电阻值的变化与一个定值电阻串联来输出不同分压值进行判断,当光敏电阻正对光源时电压最大,偏离时电压值线性下降。
方案二:使用四个光敏三极管为测光部件采用方案一的布局方式和工作方式制作探测端,但因三极管有β倍的电流放大作用且光源偏离三极管正对方向时电压值下降的波形斜率更大,所以微小位移的幅值变化更明显。
考虑到二者光敏特性曲线的斜率和幅值变化范围等方面因素,故最终选择方案二。
2. 光源跟踪系统转动的控制方案选择方案一:光源跟踪系统由双舵机构成“云台”式结构,机械结构简单、稳定,且舵机在两个方向上都可以做到180__176;自由的转动,转动速度通过PWM波的占空比控制,但舵机本身控制转角的精度可能使连续小角度定位时产生抖动。
方案二:水平方向利用带减速箱的步进电机控制,垂直方向上利用舵机控制转动。
由于减速箱的使用相当于使步进电机的步长角度变得非常小,使在2米外的光源附近的激光束移动时很平滑,可以做到精确步长控制的连续定位,但缺点是减速箱和电机的完全啮合有一定难度,需要较高的机械加工精度。
综上所述,方案一控制方法最为简易,但控制稳定性可能不足;方案二控制精确度高。
第四组--点光源跟踪系统

全国大学生电子设计竞赛2010年TI杯模拟电子系统专题邀请赛设计报告参赛题:点光源跟踪系统(B题)参赛学校:黄冈师范学院参赛成员:马沁、王亮、赵娟点光源跟踪系统(B题)摘要本设计主要以TI公司的超低功耗MCUMSP430处理器为核心,控制步进电机带动激光笔实现白光LED点光源的跟踪,并设计制作了一个点光源跟踪的系统,达到了题目规定的基本和发挥部分的要求,效果较好。
该系统由430单片机最小系统、点光源检测、步进电机驱动等电路组成,利用八个光电二极管实现点光源强度和移动方向的检测,通过信号放大和处理,送单片机内部八路AD采样电路,单片机将采样结果经过两次数字程序滤波后,进行分析和处理,控制步进电机运转的步距和方向,从而达到点光源的精确跟踪。
光源偏离方向检测和光强度检测采用八个廉价的光电传感器,并将它们分为两组,采用对两组传感器采集的数据分别求平均值的算法,实现对环境光线的滤除和光源偏离方向的判断,算法简单,合理高效。
同时增加了电机转动角度的测量和显示功能。
关键字:单片机LED点光源光敏二极管步进电机一、系统设计方案、控制算法选择与论证1.1 系统设计方案设想与论证1.1.1测光和运动方向判断电路的比较与论证为了选择符合设计系统所需的光电传感元件,以及能更好的实现光源跟踪功能,通过对常见半导体光敏元件进行试验和测试比较,结果如下表:感光元件都有共同点,即将光信号转换为电信号。
但在不同的工作环境要求中,各自都存在优缺点,如就检测距离而言,红外接收管探测距离远,但电压变化率相对较大。
而光敏电阻探测距离近,电压变化相对平稳等。
本次设计要求探测距离在100cm 处,且能准确快速探测到光源,根据以上器件比较,光敏二极管具有较宽的检测范围,红外接收管具有较强的方向性和抗干扰能力,为满足设计需要和实现准确定位功能,选择光敏二极管和红外接收管两者优点相结合的方式是最佳选择。
1.1.2 光源跟踪方案选择方案一:直流电机带动激光笔。
点光源跟踪系统设计报告

点光源跟踪系统摘要:本文设计了一个基于低功耗单片机MSP430F2618的光源跟踪系统,系统分为可移动光源、光信号接收及处理、亮斑位置调整三个主模块。
可移动光源利用1W白光LED和驱动芯片TPS61062发出亮度可调的光信号;光信号接收及处理模块利用光敏三极管并经过信号调理电路,完成光信号的接收和处理;亮斑位置调整模块由步进电机及其驱动电路组成,是调整亮斑位置的执行电路,MCU对采集的光信号进行处理,并运用比例积分(PI)控制算法与脉宽调制(PWM)完成对电机的控制,从而实现激光亮斑对可移动光源位置的跟踪。
此外,该系统还包含电源、声光报警、液晶显示、拨码开关等模块,人机交互界面友好,使用方便。
关键字: PI控制算法 PWM控制 LED光源步进电机1一、系统方案1. 整体方案选择根据题目要求,此光源跟踪系统可按功能划分为可移动光源、光信号接收及处理、亮斑位置调整三个主模块。
利用光敏三极管将可移动光源发出的光信号转化为电信号后,由MCU对采集的信号进行计算处理,并控制电机和舵机以调整激光笔的角度,实现激光亮斑对可移动光源的跟踪。
系统整体框图如下图所示:2.主控制器的论证与选择方案一:采用FPGA作为系统的主控制器,对光信号接收及处理系统产生的电信号进行处理,并控制电机运动。
FPGA速度快,但成本偏高,算术运算能力不强。
方案二:采用MSP430F2618单片机作为控制核心。
该单片机拥有包括ADC 在内的丰富外设资源,且算术运算能力较强,软件编程灵活,可以实现各种灵活的运动控制。
考虑到本系统对速度要求不高,最终采用了方案二。
3. 光信号接收及处理模块的论证与选择此模块的主要功能是利用三组光敏三极管,把可移动光源发出的光信号转化为电信号,其中两组位于水平面,一组位于竖直面,且每组的两个光敏三极管关于中心对称。
要实现此模块功能,有以下可选方案:方案一:利用比较器,并设置门槛电压为0V,输入信号为每组的两个光敏三极管的分压。
点光源跟踪系统硬件设计(含软件)
基于单片机msp430的点光源跟踪系统硬件设计设计总说明目前太阳能是一种清洁无污染的能源, 发展前景非常广阔, 太阳能发电已成为全球发展速度最快的技术。
然而它也存在着间歇性、光照方向和强度随时间不断变化的问题, 这就对太阳能的收集和利用提出了更高的要求。
目前很多太阳能电池板阵列基本上都是固定的, 没有充分利用太阳能资源, 发电效率低下。
据实验, 在太阳能光发电中, 相同条件下, 采用自动跟踪发电设备要比固定发电设备的发电量提高35%,因此在太阳能利用中进行跟踪是十分必要的。
本设计给出了一种基于单片机的点光源自动跟踪系统设计方案, 该设计使用TI公司的超低功耗的MSP430F149 单片机作为整个系统的控制核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
利用4路光敏三极管(3DU33)来检测点光源的位置并将检测到的信号经过放大传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。
同时将光敏三极管检测的信号显示在LCD液晶屏幕上。
本设计可以扩展为以后的太阳能发电的自动跟踪系统。
该系统不仅能自动根据太阳光方向来调整太阳能电池板朝向, 结构简单、成本低, 而且在跟踪过程中能自动记忆和更正不同时间的坐标位置, 不必人工干预, 特别适合天气变化比较复杂和无人值守的情况, 有效地提高了太阳能的利用率, 有较好的推广应用价值。
关键词:MSP430;光源;跟踪;检测;传感器Msp430 microcontroller-based point source tracking systemHardware DesignDesign DescriptionCurrently solar energy is a clean and pollution-free energy, the development prospects are very bright, solar power has become the world's fastest-growing technology. But it also has intermittent, light direction and intensity of the problem change over time, which the collection and use of solar energy put forward higher requirements. At present, many solar arrays are basically fixed, do not make full use of solar energy resources, power generation efficiency is low. According to experiment, solar power, the same conditions, power generation equipment using automatic tracking equipment than the fixed power generating capacity increased by 35%, so to track utilization of solar energy is necessary.This design gives a light source based on single chip design of automatic tracking system, the design uses TI's MSP430F149 ultra-low power microcontroller controls the whole system as the core, mainly by the motor drive module, point source detection module, power supply conversion module and other modules. Using 4 phototransistor (3DU33) to detect the location of a point source is detected and amplified signal to pass the controller MSP430F149 microcontroller, operation and processing through the MCU to determine trends in the movement of light source, and operation of the control signal transmission to two stepper motors, to follow the point source movement. When the horizontal direction, 2-way phototransistor relatively close to measured values, while 2-way vertical phototransistor on the measured values are relatively close, the sensor is located in the middle of the vertical laser pointer to point to the exact point of light. Phototransistor detected the same time are shown on the LCD liquid crystal screen.This design can be extended automatically for subsequent sun tracking system. The system can not only automatically adjust the direction of sunlight solar panels toward the simple structure, low cost, but also in the process of tracking memory and can automatically correct the coordinates of the location at different times, without human intervention, especially for more complex and non-weather people on duty, effectively improving the utilization of solar energy, has a higher value.Key Words:MSP430; light source; tracking; detection; sensor目录1绪论 (1)2点光源跟踪系统硬件设计 (2)2.1系统设计概述 (2)2.2方案论证与比较 (3)2.2.1主控芯片的选择 (3)2.2.2电机的选择 (4)2.2.3电机驱动的选择 (4)2.2.4传感器的选择 (4)2.2.5 LCD液晶显示器的选择 (5)2.3系统硬件设计 (5)2.3.1硬件方框图 (5)2.3.2单片机MSP430 (6)2.3.3步进电机 (8)2.3.4液晶显示器 (10)2.3.5信号放大器 (14)2.4硬件电路图设计 (14)2.4.1电源转换电路设计 (14)2.4.2信号检测电路设计 (15)2.4.3步进电机驱动电路设计 (15)2.4.4键盘设计 (16)2.4.5液晶显示器的设计 (16)2.4.6系统原理图 (17)3印刷电路图的绘制 (18)3.1 PCB图绘制的准备 (18)3.2 PCB的绘制 (18)4仿真步进电机的控制 (19)4.1硬件仿真 (19)4.1.1方案设计 (19)4.1.2硬件仿真原理 (19)4.2软件仿真 (22)4.2.1程序流程图 (22)4.2.3源程序 (22)4.3系统调试和结果分析 (23)4.3.1电机正转运行 (23)4.3.2电机反转运行 (24)4.3.3仿真结果与分析 (24)5总结 (25)致谢 (26)参考文献 (27)附录 (28)1绪论该设计采用TI公司的超低功耗的MSP430F149 单片机作为整个系统的核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点光源跟踪系统设计报告设计题目一、任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED,固定在一支架上。
LED的电流能够在150~350mA的范围内调节。
初始状态下光源中心线与支架间的夹角θ约为60º,光源距地面高约100cm,支架可以用手动方式沿着以A为圆心、半径r约173cm的圆周在不大于±45º的范围内移动,也可以沿直线LM移动。
在光源后3 cm距离内、光源中心线垂直平面上设置一直径不小于60cm暗色纸板。
光源跟踪系统A放置在地面,通过使用光敏器件检测光照强度判断光源的位置,并以激光笔指示光源的位置。
图1 光源跟踪系统示意图二、要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
三、说明1.作为光源的LED的电流应该能够调整并可测量;2.测试现场为正常室内光照,跟踪系统A不正对直射阳光和强光源;3.系统测光部件应该包含在光源跟踪系统A中;4.光源跟踪系统在寻找跟踪点光源的过程中,不得人为干预光源跟踪系统的工作;5.除发挥部分(3)项目外,点光源的电流应为300±15 m A;6.在进行发挥部分(3)项测试时,不得改变光源跟踪系统的电路参数或工作模式;四、评分标准设计报告项目分数系统方案 2 理论分析与计算8 电路与程序设计9 测试方案与测试结果8 设计报告结构及规范性 3小计30基本要求完成第(1)项10 完成第(2)项20 完成第(3)项20小计50发挥部分完成第(1)项15 完成第(2)项15 完成第(3)项15 其他 5小计50总分130设计总方案一:系统概述本设计是一个点光源追踪系统,主要由传感器来对光照检测与处理,控制器分析与处理,执行机构运行和模块显示这几个部分构成。
整个系统是以单片机为控制核心,通过两个光敏传感器来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,借以来控制电机。
当水平方向上的两传感器的测量数值相对接近,位于传感器中间的激光笔将精确的指向点光源。
本系统是有控制核心的单片机对传感器检测的光源的信号进行分析和处理然后控制电机,使其跟随点光源移动。
达到跟踪点光源的目的。
系统的硬件主要有控制器单片机,电机驱动模块,点光源检测模块,显示模块,键盘,电源转换模块等模块组成的系统总体框图:二:核心硬件组成模块基本: 采样模块、单片机控制模块、电机驱动模块、电源模块 扩展:点光源电流调节模块、显示模块、键盘模块1、点光源采样模块a.点光源检测的原理:2个光敏三极管分布在激光笔的两端,激光笔处于2个光敏三极管的中点,当激光笔指向点光源的时候,2个光敏三极管感光强度一样。
ADC 会实时采样的光敏三极管数据,不断地进行比较,移动点光源时,会通过比较产生判断,驱动电机使激光笔实现对点光源的跟踪。
光敏三极管单片机电机驱动芯片电机实现跟踪功能检测光源电路的主要原理是通过检测到光敏电阻的电阻变化,从而引起电压的变化,单片机通过识别不同的电压信号来控制电机的转动。
检测光敏电阻主要是通过信号放大电路实现。
光敏三极管受到不同光照射时阻值不同。
通过与一个固定阻值的电阻串联分压,将阻值变化转化为电压变化。
当光照强度变化时,电压值变化。
,通过反向比例放大电路将电压值放大,放大后送入12位A/D转换模块TLC2543中的AIN0到AIN1,分别对二路光敏三极管输出电压进行采集。
采用光敏三极管(SDU5C)检测光源。
图1-1光敏三极管采样电路b.信号放大器因为传感器检测到的信号是比较微弱的,单片机不好处理,为了是单片机很好更方便的处理检测到的微弱信号,我们需要将其放大然后送给单片机处理。
在本系统中我们选择的是信号放大器LM324。
LM324是四运放集成电路,它采用14脚双列直插塑料封装,外形如图所示。
它的内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
每一组运算放大器可用图1-2所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。
两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的相位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。
图1-2 运算放大器图1-3 LM324引脚图LM324四运放电路具有电源电压范围宽,静态功耗小,可单电源使用,价格低廉等优点。
图1-4 信号采集电路2、芯片选择单片机选用常见的AT89C51。
其控制方便,功能全面,且相对廉价易得。
3、电机及驱动的选择采用步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
采用恒压桥式驱动芯片L298N和L297联合。
驱动能力强,电路简单,使用方便。
步进电机本系统中步进电机的主要作用是调整激光笔的位置,指向点光源。
我们选的是两相混合式步进电机,型号是56BYG250B-0241,步距角0.9/1.8度,相电流2.4A,保持转矩0.65N*m,转动惯量180g*cm²,重量0.48kg,外形尺寸(56*56*45)mm。
本系统中我们选用的是L298N驱动芯片,L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
步进电机的控制步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR )、永磁式步进电机(简称PM )和混合式步进电机(简称HB )。
(1)两相四拍的工作模式时序图(如表2-1所示):表2-1 两相四拍的工作模式时序图步进电机 信号输入第一步 第二步 第三步 第四步 返回第一步 正转IN10 1 1 1 返回IN2 1 0 1 1 返回 IN3 1 1 0 1 返回 IN4 1 1 1 0 返回 反转IN11 1 1 0 返回 IN2 1 1 0 1 返回 IN3 1 0 1 1 返回 IN4111返回(2)控制换相顺序两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)依次循环。
两相四线步进电机的八拍工作方式,其各相通电顺序为:(A -AB -B -BA ’-A ’-A ’B ’-B ’-B ’A)。
(3)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
(4)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
图3-1 步进电机驱动电路4、电源转换电路设计本系统中用的电压有+12V,+5V,+3V。
所以我们用下面的转换电路为系统各元件提供电源。
电路图如下图2-3所示。
图4-1 电源转换电路扩展部分一、液晶显示器本系统中显示器是用来显示光敏三极管检测到的信号,是需要显示汉字的。
所以我们选用的是LCD液晶显示器,型号:FYD12864-0402B。
FYD12864-0402B 是一种具有4位/8位并行、2线或3线串行多种接口方式,内部含有国标一级、二级简体中文字库的点阵图形液晶显示模块;其显示分辨率为128×64, 内置8192个16*16点汉字,和128个16*8点ASCII字符集.利用该模块灵活的接口方式和简单、方便的操作指令,可构成全中文人机交互图形界面。
可以显示8×4行16×16点阵的汉字. 也可完成图形显示.低电压低功耗是其又一显著特点。
由该模块构成的液晶显示方案与同类型的图形点阵液晶显示模块相比,不论硬件电路结构或显示程序都要简洁得多,且该模块的价格也略低于相同点阵的图形液晶模块。
1.基本特性:(1)低电源电压(VDD:+3.0-+5.5V)(2)显示分辨率:128×64点(3)内置汉字字库,提供8192个16×16点阵汉字(简繁体可选)(4)内置 128个16×8点阵字符(5)2MHZ时钟频率(6)显示方式:STN、半透、正显(7)驱动方式:1/32DUTY,1/5BIAS(8)背光方式:侧部高亮白色LED,功耗仅为普通LED的1/5-1/10(9)通讯方式:串行、并口可选(10)内置DC-DC转换电路,无需外加负压(11)无需片选信号,简化软件设计(12)工作温度: 0℃ - +55℃ ,存储温度: -20℃ - +60℃2.并行接口引脚说明(如表2-3所示)表2-3 并行接口引脚说明管脚号管脚名称电平管脚功能描述1 VSS 0V 电源地2 VCC 3.0+5V 电源正3 V0 - 对比度(亮度)调整4RS(CS)H/L RS=“H”,表示DB7-DB0为显示数据RS=“L”,表示DB7-DB0为显示指令数据5R/W(SID ) H/LR/W=“H”,E=“H”,数据被读到DB7-DB0R/W=“L”,E=“H→L”, DB7-DB0的数据被写到IR或DR6 E(SCLK) H/L 使能信号7 DB0 H/L 三态数据线8 DB1 H/L 三态数据线9 DB2 H/L 三态数据线10 DB3 H/L 三态数据线11 DB4 H/L 三态数据线12 DB5 H/L 三态数据线13 DB6 H/L 三态数据线14 DB7 H/L 三态数据线15 PSB H/L H:8位或4位并口方式,L:串口方式(见注释1)16 NC - 空脚17 /RESET H/L 复位端,低电平有效(见注释2)18 VOUT - LCD驱动电压输出端19 A VDD 背光源正端(+5V)(见注释3)20 K VSS 背光源负端(见注释3)*注释1:如在实际应用中仅使用并口通讯模式,可将PSB接固定高电平,也可以将模块上的J8和“VCC”用焊锡短接。