控制系统的PD校正设计及仿真
自控原理课件 第7章-自动控制系统控制器及其校正与设计
31
32
33
比例控制器另一作用是调整系统的开环放大 倍数,加快系统的响应速度。 考虑图7.14所示带有比例控制器校正的控制系 统,系统的闭环传递函数为
34
可见,Kp 愈大,稳态精度愈高,系统的时间常 数τ=T/(1+Kp )愈小,则系统响应速度愈快。 [例7.4]被控对象为一阶惯性的比例控制器控 制时SIMULINK仿真 如图7.15所示,一阶惯性环节为10/(5s+1) ,比例控制器增益为1时,系统输出为指数上升 形式。 如图7.16所示,被控对象不变,比例控制器 增益为10,系统输出仍为指数上升形式,输出与 输入不相等,仍为有差系统,但误差减小,且响 应速度加快,读者可计算验证。
67
由图7.36可见,校正前原系统是O型系统(无积 分器)是有静差系统。校正后系统成为I型系统(含 有一个积分器),在阶跃输入下能实现无静差,改 善了系统的稳态性能。校正前原系统相位裕量= 88º ,校正后相位裕量=65,相位裕量是减小的, 意味着系统的超调量将增加,降低了系统的稳定 性。总之,采用PI校正,能改善系统的稳态性能, 而动态性能可能受到一定的影响。
第7章 自动控制系统控制器及其 校正与设计
本章主要讲述自动控制系统中常用的控制器 及其校正。在对自动控制系统分析后,发现系统 不能满足性能指标的要求,需要对系统进行改进, 在原有的系统中,有目的地增添一些装置和元件, 人为地改变系统的结构和性能,使之满足所要求 的性能指标,这种方法就称为校正。常用的校正 方法有串联校正、反馈校正和顺馈补偿。同时, 本章还简要叙述常用的工程上的设计方法。
38
SIMULINK仿真结果如图7.20所示,输出波形 虽有振荡,但超调量减小,振荡次数减少,系统响 应得到了改善。 7.2.3 积分控制器(I)校正
基于PD控制方式的9A开关电源Multisim仿真研究

基于PD控制方式的9A开关电源Multisim仿真研究学院:电气与光电工程学院专业:电气工程及其自动化班级:13电气卓越姓名:**学号: ********绪论Buck变换器最常用的变换器,工程上常用的拓扑如正激、半桥、全桥、推挽等也属于Buck族,其优点有输出电流纹波小,结构简单,变比可调,实现降压的功能等。
然而其输出电压纹波较大,buck电路系统的抗干扰能力也不强。
为了使其具抗干扰能力,输出电流达到所需的等级,减小其电压纹波,现设计校正网络使其闭环,提高系统的能力。
常用的控制器有比例积分(PI)、比例微分(PD)、比例-积分-微分(PID)等三种类型。
本文将通过用multisim实例来研究PD控制器的调节作用。
一.设计要求及设计背景1.设计要求依据技术指标设计主功率电路,采用参数扫描法,对所设计的主功率电路进行仿真;掌握小信号建模的方法,建立Buck变换器原始回路增益函数;采用Matlab绘制控制对象的Bode图;根据控制对象的Bode图,分析所需设计的补偿网络特性进行补偿网络设计。
采用所选择的仿真软件进行系统仿真,要求有突加、突卸80%负载和满载时的负载特性,分析系统的静态稳压精度和动态响应速度。
2.设计背景Buck变换器最常用的变换器,工程上常用的拓扑如正激、半桥、全桥、推挽等也属于Buck族,其优点有输出电流纹波小,结构简单,变比可调,实现降压的功能等。
然而其输出电压纹波较大,buck电路系统的抗干扰能力也不强。
为了使其具抗干扰能力,输出电流达到所需的等级,减小其电压纹波,现设计校正网络使其闭环,提高系统的能力。
二.Buck变换器主电路设计1.1技术指标:输入直流电压(V IN):12V;输出电压(V O):5V;输出电流(I N):9A;输出电压纹波(V rr):50mV;基准电压(V ref):1.5V;开关频率(f s):100kHz;1.2主电路及参数计算 1.2.1主电路图1 buck 主电路1.2.2滤波电容计算输出纹波电压只与电容容量及ESR 有关:0.2rr rr C l NV VR i I ==∆(1) 电解电容生产厂商很少给出ESR ,而且ESR 随着电容的容量和耐压变化很大,但C 与R C 的乘积趋于常数,约为50~80μ·ΩF 。
PID控制算法及MATLAB仿真分析

题目:以PID控制进行系统仿真学院自动化学院专业班级工业自动化111班学生姓名黄熙晴目录1 引言 (1)1.1本论文研究内容 (1)2 PID控制算法 (1)2.1模拟PID控制算法 (1)2.2数字式PID控制算法 (3)2.3PID控制算法的改进 (5)2.3.1微分项的改进 (5)2.3.2积分项的改进 (9)2.4模糊PID控制算法 (11)2.4.1模糊推理的系统结构 (12)2.4.2 PID参数在线整定原则 (12)2.5PID控制器研究面临的主要问题 .................................. 错误!未定义书签。
3 MATLAB编程和仿真 (13)3.1PID控制算法分析 (13)3.2MATLAB仿真 (15)4结语 (20)参考文献...................................................................................... 错误!未定义书签。
1 引言PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
光学表面等离子共振生物传感技术受温度影响很大,因此设计高精度的温度控制器对于生物分析仪十分重要。
研究PID的控制算法是PID控制器整定参数优化和设定的关键技术之一。
在工业过程控制中,目前采用最多的控制方式依然是PID方式。
它具有容易实现、控制效果好、鲁棒性强等特点,同时它原理简单,参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。
在实际的应用中,许多被控过程机理复杂,具有高度非线性、时变不确定性和纯滞后等特点,特别是在噪声、负载扰动等因素的影响下,参数复杂烦琐的整定过程一直困扰着工程技术人员。
为了减少参数整定的工作量,克服因环境变化或扰动作用造成系统性能的降低,就要提出一种PID控制参数的自动整定。
1.2本论文研究内容本文在介绍传统的PID控制算法,并对传统算法改进后,在学习的基础上提出一种模糊参数自整定方法,这种模糊控制的PID算法必须精确地确定对象模型。
异步电机矢量控制系统的设计及仿真研究

在定子 电流的两 个分 量之 间实 现 了解耦 , i 唯一 决定 磁链 i则 只影 响转矩 , 与直流 电机 中的励磁 电流和 电枢 电流
相对应 , 这样就大大简化 了多变量强耦合 的交流变频调 速系
r b s e s h p e e u ao n ec re t e l tro a i o a e trc n rlu e P o tolr a d t e s e d o u t s .T e s e d r g l tra d t u r n g ao ft d t n lv c o o t s 1 n r l , n h p e n h ru r i o c e r s o s s o e v rh o n t e c n r lp o e s n o d rt o v h s rb e ,we p o o e e in meh d o e p n e f n o e s o ti h o t r c s .I r e o s l e t e e p o lms t o rp s d a d sg t o f s e d c n rl ri h n u t n mo o e trc n r l o e p r o e o u p e sn p e e p n e o es o t n i— p e o t l n t e id ci trv co o to rt u p s fs p r si g s e d r s o s v r h o n oe o f h i d ci n mo o e trc n r la d e h n i g i u t trv co o to n n a cn mmu i . T e i d ci n moo s d f l r n e e tr c n rl t — o nt y h n u t tr u e ed o e t d v c o o t o a o i i o
自动控制6第六章控制系统的综合与校正

复合校正
同时采用串联校正和反馈校正的方法,对系 统进行综合校正,以获得更好的性能。
数字校正
利用数字技术对控制系统进行校正,具有灵 活性和高精度等优点。
02 控制系统性能指标及评价
控制系统性能指标概述
稳定性
准确性
系统受到扰动后,能否恢复到原来的 平衡状态或达到新的平衡状态的能力。
系统稳态误差的大小,反映了系统的 控制精度。
针对生产线上的各种工 艺要求,设计相应的控 制策略,如顺序控制、 过程控制等。
系统校正方法
根据生产效率和产品质 量要求,采用适当的校 正方法,如PID参数整定、 自适应控制等。
仿真与实验验证
通过仿真和实验手段, 验证综合与校正后的工 业自动化生产线控制系 统的稳定性和效率。
控制系统综合与校正的注
06 意事项与常见问题解决方 案
仿真与实验验证
通过仿真和实验手段,验证综合与校正后 的导弹制导控制系统的精确性和可靠性。
系统校正方法
针对导弹制导控制系统的性能要求,采用 适当的校正方法,如串联校正、反馈校正 等。
实例三
01
02
03
04
控制系统结构
分析工业自动化生产线 控制系统的组成结构, 包括传感器、执行机构、 PLC等部分。
控制策略设计
考虑多变量解耦控制
对于多变量控制系统,可以考虑采 用解耦控制策略,降低各变量之间 的相互影响,提高系统控制精度。
加强系统鲁棒性设计
考虑系统不确定性因素,加强 系统鲁棒性设计,提高系统对 各种干扰和变化的适应能力。
THANKS FOR WATCHING
感谢您的观看
控制系统综合与校正的注意事项
明确系统性能指标
实验四 PID校正

微分 — 积分
图 6.1 模拟 PID 控制系统原理框图
PI 控制器 —
被控对象
D 控制器
图 6.2 微分先行 PID 控制原理图
I 控制器 —
被控对象
PD 控制器
图 6.3 伪 PID 控制原理图
PID 控制器是一种线性控制器,它根据给定值 r (t ) 与实际输出值 y (t ) 构成控制偏差 e(t ) :
6)
点击“
”编译程序,编译成功后在 MATLAB 命令窗口中有提示信息(如果没有修改控制界面结
构,在编译一次后,不需再进行此步骤) :
7) 8) 9)
点击“ ”连接程序,此时可听到电控箱中继电器接通时发出一声轻响。 点击“ ”运行程序, 电机开始转动,任其运行 10 秒钟左右,然后点击 停止程序, 双击打开示波器“Scope”,观察加入 2000rpm 的阶跃信号时直流伺服电机转速响应曲线,测量并 记录超调量 ,峰值时间
打开”Scope”,点击窗口左上角的 name”,“Format”选为 Array。
,勾选“Save data to workspace”,并可自定义输出的“Variable
10) 从“Simulink\ Commonly Used Blocks”中拉一个“Sum”到“untitled”窗口中:
11) 双击“Sum”模块,打开如下窗口,反馈设置如下图:
统的性能指标达到:ts≤1.5 秒,δp≤4.3%,稳态误差为 0。
三、实验设备
1. 2. GSMT2014 型直流伺服系统控制平台; PC、MATLAB 平台。
四、实验原理
1. PID 简介 PID 的控制算法有很多,不同的算法各有其针对性。图 6.1,图 6.2,图 6.3 给出了三种不同的算法。 在模拟控制系统中, 控制器最常用的控制规律是 PID 控制。 模拟 PID 控制系统原理框图如图 6.1 所示。 系统由模拟 PID 控制器和被控对象组成。 比例 被控对象
控制系统I_PD控制器参数的优化设计

第25卷第3期苏 州 大 学 学 报(工 科 版)Vol.25No.32005年6月JOURNA L OF SOOCH OW UNIVERSIT Y(ENGINEERING SCIENCE E DITION )J un.2005文章编号:1673-047X (2005)03-0050-03控制系统I 2PD 控制器参数的优化设计Ξ王福永(苏州大学机电工程学院,江苏苏州215021)摘 要:介绍I 2PD 调节器的设计方法,仿真结果表明,对同一被控对象,I 2PD 控制比传统的PID 控制,系统的动态品质要优越。
关键词:I 2PD 控制器;优化设计;单纯形法;MA TLAB ;仿真中图分类号:TP13 文献标识码:A在控制领域中,按偏差的比例(P )、积分(I )和微分(D )进行的PID 控制具有原理简单,易于实现等优点,得到广泛应用。
但传统的PID 控制器都是和控制对象G (s )串联,置于前向通路,存在微分突变现象,I 2PD 控制器就能很好地解决这个问题。
1 传统的PID 控制器及其参数调整图1 具有PID 控制器的闭环系统图1是具有PID 控制器的闭环系统。
PID的Kp 、Ti 和T d 三个参数的大小,影响系统的动态性能,正确调整它们,十分重要。
文献[1]指出,对被控对象难于用解析法建立数学模型时,要用齐格勒-尼可尔斯(Z -N )法则去调整PID 控制器的参数。
例1 在图1中,G (s )=1s (s +1)(s +5),根据Z -N 法则,G C (s )的有关参数[1]是:Kc =30;Tc =2.81s ;Kp =0.6Kc =18;Ti =0.5Tc =1.405;T d =0.125Tc =0.3514图2 Z -N 法则校正后系统的单位阶跃响应曲线Gc (s )=Kp (1+1Tis +T ds )=18×(1+11.405s+0.3514s )用MA TLAB 对图1所示系统仿真,得P 0=61.7786%t s (2%)=10.2355sZ -N 法则校正后系统的单位阶跃响应曲线如图2所示。
控制系统校正装置仿真
目录0绪论 01 控制系统介绍 (1)1.1控制系统的分类 (1)1.2 控制系统的组成 (2)2系统的设计及校正方法 (2)2.1系统设计的问题 (2)2.2性能指标 (3)2.3校正结构 (3)2.4校正装置的设计方法 (4)2.5串联校正 (5)2.6反馈校正 (9)3设计应用仿真 (10)3.1仿真软件简介 (10)3.2利用串联校正和反馈校正来实现系统校正 (12)3.3利用串联超前—滞后校正实现系统校正 (16)4结论 (21)参考文献 (22)控制系统校正装置仿真绪论在科学技术飞速发展的今天,自动控制所起的作用越来越重要,无论是在宇宙飞船,导弹制导的尖端技术领域,还是在机器制造业及工业过程控制中,它所取得的成就是惊人的。
自动控制理论与实践的不断发展,为人们提供了最佳的设计系统的方法,大大提高了生产效率,同时促进了技术的进步。
然而在进行系统的设计时,常常遇到初步设计出来的系统往往不能满足已经给出的所有性能指标的要求。
而直接去改变未校正系统的其他参数是比较困难的,这样就得在原系统的基础上采取另外的一些措施,即对系统加以“校正”。
所谓校正其实就是在所设计的未能满足预期设计要求的系统中加入一些参数,可以根据需要而改变原有系统的机构或装置,从而使系统的整个特性发生变化,满足给定的各项性能指标。
这附加的装置使未校正的系统的缺陷得到补偿,这就是校正的作用。
所以一个系统的校正装置的校正效果直接影响该系统的性能指标以及工作状况。
随着自动控制理论的不断发展,目前在控制系统的校正方式中,比较常用的校正方式主要有:串联校正,反馈校正,前馈校正和复合校正。
在实际系统中不同的系统所侧重的性能指标也是不一样的,不同的校正方式校正的效果也是不一样的,这就需要设计人员有选择性地选用适合系统实际状况的校正方式进行设计。
紧接着,如何去设计校正装置的方法问题被提出来了。
随着计算机技术的高速发展,计算机仿真技术随着计算机语言的不断更新,也在不断发展。
自动控制控制系统的校正及仿真

课程设计报告题目控制系统的校正及仿真课程名称自动控制原理院部名称机电工程学院专业班级学生姓名学号课程设计地点课程设计学时一周指导教师金陵科技学院教务处制目录1、课程设计达到的目的、题目及要求 (3)1.1课程设计应达到的目的 (3)1.2课程设计题目及要求 (3)2、校正函数的设计 (4)2.1校正函数理论分析 (4)2.2校正函数计算过程及函数的得出 (4)3、传递函数特征根的计算 (8)3.1校正前系统的传递函数的特征根 (8)3.2校正后系统的传递函数的特征根 (8)4、系统动态性能的分析 (10)4.1校正前系统的动态性能分析 (10)4.2校正后系统的动态性能分析 (13)5、系统的根轨迹分析 (16)5.1校正前系统的根轨迹分析 (16)5.2校正后系统的根轨迹分析 (18)6、系统的幅相特性 (20)6.1校正前系统的幅相特性 (20)6.2校正后系统的幅相特性 (20)7、系统的对数幅频特性及对数相频特性 (22)7.1校正前系统的对数幅频特性及对数相频特性 (22)7.2校正后系统的对数幅频特性及对数相频特性 (23)8、心得体会 (26)9、参考文献 (27)1、课程设计达到的目的、题目及要求1.1课程设计应达到的目的(1)掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
(2)学会使用MATLAB 语言及Simulink 动态仿真工具进行系统仿真与调试。
1.2课程设计题目及要求(1)课程设计题目:已知单位负反馈系统被控制对象的传递函数为)1125.0)(1()(0++=s s s K s G ,试用频率法设计串联滞后校正装置,使系统的相角裕量 30>γ,静态速度误差系数110-=s K v 。
(2)课程设计要求:1)首先, 根据给定的性能指标选择合适的校正方式对原系统进行校正,使其满足工作要求。
实验十 控制系统的PID校正设计及仿真word精品文档6页
实验十 控制系统的PID 校正设计及仿真1000810203--陆俊芝一、实验目的1.学会用MA TLAB 对系统进行仿真;2.应用频率综合法对系统进行PID 校正综合。
二、设计原理与步骤1.设计原理超前校正的主要作用是增加相角裕量,改善系统的动态响应特性。
滞后校正的作用是改善系统的静态特性,两种校正结合起来就能同时改善系统的动态和静态特性。
滞后超前校正(亦称PID 校正)综合了前两种校正的功能。
滞后超前校正(亦称PID 校正)的传递函数为:它相当于一个滞后校正与一个超前校正相串联,其对数频率特性如图10-1所示:2.设计步骤基于频率法综合滞后-超前校正的步骤是:(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;(2)根据动态指标要求确定c ω,检查系统固有部分在c ω的对数幅频特性的斜率是否为-2,如果是,求出c ω点的相角;(3)按综合超前校正的步骤(3)~(6)综合超前部分G C1(S )(注意在确定m θ时要计入滞后校正带来的0012~5的相角滞后量)。
在第(6)步时注意,通常)()(c c c g L L ωω+比0高出很多,所以要引进滞后校正;(4)令βlg 20=)()(c c c g L L ωω+求出β;(5)按综合滞后校正的步骤(4)~(5)综合滞后部分)(2S G c ;(6)将滞后校正与超前校正串联在一起,构成滞后超前校正:)()()(21S G S G S G c c c ⋅=三、实验内容练习10-1反馈控制系统的开环传递函数为:要求:(1)速度偏差系数Kv 50≥(2)相位裕度γ%5400±=(3)增益穿越频率%510±=c ω要求:(1)设计满足上述要求的滞后-超前控制器;(2)用Simulink 进行仿真;(3)画出校正前后的Bode 图(4)分析讨论设计过程及结果。
解:(1)滞后-超前控制器 (2)用Simulink 进行仿真,校正前用Simulink 进行仿真,校正后(3)校正前的Bode 图校正后的Bode 图(4)因为经过滞后——超前校正后系统的相位裕度γ07.43=增益穿越频率10=c ω。
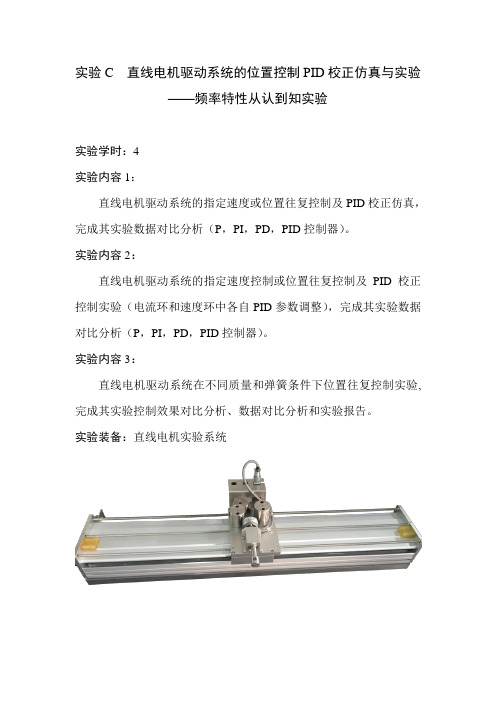
实验C 直线电机PID校正仿真与实验
u(t)
KP
e(t)
1 TI
t
e(t)dt TD
0
de(t)
dt
或写成传递函数的形式:
(4.2)
G( s)
U (s) E(s)
KP 1
1 TI s
TDs
(4.3)
式中: K P ——比例系数;TI ——积分时间常数;TD ——微分时间常数。
3) 双击“PID”模块,分别设置参数为 KP,KI,KD 参数
4) 点击“ ”运行程序, 双击示波器“Scope1”,点击“ ”得到系统的阶跃响应曲线: 相应的控制器输出,示波器“Scope2”曲线为:
2. 实时控制 1) 打开倒立摆电控箱上的电源按钮,并将弹簧小车扶至中间。 2) 在 MATLAB/Current Folder 中打开文件“e4\demo04.slx”,会弹出如图所示的实时控 制界面。
在控制系统设计和仿真中,也将传递函数写成:
G(s) U(s) E(s)
KP
KI s
KDs
KDs2
Kps KI s
(4.4)
式中: K P ——比例系数; K I ——积分系数; KD ——微分系数。上式从根轨迹角度
看,相当于给系统增加了一个位于原点的极点和两个位置可变的零点。
(1.3)
由上式可知,系统的两个开环极点为
7.1263i
注意
此处 M 为小车及所有砝码总和,如无特殊说明,本手册以下推导均基于(1.3) 模型
2. 在 MATLAB/Simulink 中建立数学模型(1.3)所对应的开环系统的结构图如下所示: A. 建立如式(1.3)所示的数学模型的开环系统 I:
基于PID控制算法的温度控制系统的设计与仿真

摘要本设计是一种温度控制系统,温度控制在工业生产和科学研究中具有重要意义。
其控制系统属于一阶纯滞后环节,具有大惯性、纯滞后、非线性等特点,导致传统控制方式超调大、调节时间长、控制精度低。
采用单片机进行炉温控制,具有电路设计简单、精度高、控制效果好等优点,对提高生产效率、促进科技进步等具有重要的现实意义。
PID控制法最为常见,控制输出采用PWM波触发可控硅来控制加热通断。
使系统具有较高的测量精度和控制精度。
单片机控制部分采用AT89S51单片机为核心,采用Keil 软件进行编程,同时采用分块的模式,对整个系统的硬件设计进行分析,分别给出了系统的总体框图、温度检测调理电路、A/D转换接口电路,按键输入电路以及显示电路,并对相应电路进行相关的阐述软件采用PID算法进行了建模和编程,在Proteus环境中进行了仿真。
关键词:PID;单片机;温度控制;Keil;ProteusAbstractThis design is a kind of temperature control system,The temperature control in industrial production and scientific research is of great significance.Belongs to pure first-order lag link, the control system has the characteristics of big inertia, pure lag and nonlinear, the traditional control overshoot and adjustment time is long, low control precision.By single chip microcomputer temperature control, has simple circuit design, high accuracy and good control effect, to improve the production efficiency, promote the progress of science and technology has important practical significance.PID control is the most common, the control output PWM wave triggering thyristor is used to control the heating on and off.Make the system has high accuracy of measurement and control precision.Single-chip microcomputer control part adopts single chip microcomputer A T89S51 as the core,Using Keil software programming,Using block pattern at the same time, analyzes the hardware design of the whole system, respectively, of the overall system block diagram is given, the temperature detection circuit, A/D conversion interface circuit, key input circuit and display circuit, and the corresponding circuit are related in this paper, the software, the PID algorithm is used for modeling and programming in the Proteus simulation environment.Key words:PID;Single chip microcomputer;The temperature control;Keil;Proteus目录1绪论 (1)2设计方案 (2)3系统硬件仿真电路 (3)3.1 温度测量调理电路 (3)3.2 A/D转换电路 (4)3.3 按键输入电路 (5)3.4 数码管显示电路 (6)3.5 温度控制电路 (7)4程序设计 (9)4.1 程序整体设计 (9)4.2 子程序设计 (1111)4.3源程序设计 (119)5软件调试与运行结果 (41)结论 (42)致谢 (43)参考文献 (44)1绪论现代工业生产过程中,用于热处理的加热炉,需要消耗大量的电能,而且温度控制是纯滞后的一阶大惯性环节。
控制系统的PD校正设计及仿真
实验八控制系统的PD 校正设计及仿真一、实验目的1.用频率综合法对系统进行综合设计;2.学习用MA TLAB 软件对系统进行仿真。
二、实验设计原理与步骤1.设计原理超前校正(亦称PD 校正)的传递函数为:)1(11)(>++=ααTs Ts S G C 其对数频率特性如图8-1所示,超前校正能够产生相位超前角,超前校正的强度可由参数α表征。
超前校正的相频特性函数是:Tarctg T arctg ωαωωθ-=)(最大相移点位于对数频率的中心点,即:T m 11⋅=αω最大相移量为:11arcsin1)(+-=-==ααααωθθarctarct m m 或者11sin +-=ααθm mm θθαsin 1sin 1-+=容易求出,在m ω点有:αωlg 10)(=m L 2.设计步骤基于频率法综合超前校正的步骤是:(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;(2)根据动态指标要求预选c ω,从Bode 图上求出系统固有部分在c ω点的相角;(3)根据性能指标要求的相角裕量,确定在c ω点是否需要提供相角超前量。
如需要,算出需要提供的相角超前量m θ;(4)如果所需相角超前量不大于60度,按mmθθαsin 1sin 1-+=式求出超前校正强度α;(5)令)(1T c m αωω==从而求出超前校正的两个转折频率Tα1和T1;(6)计算系统固有部分在c ω点的增益)(dB L g ;及超前校正装置在c ω的增益)(dB L c 。
如果0>+c g L L 则校正或系统的截止频率'c ω比预选的值要高。
如果高出较多,应采用滞后超前校正,如果只是略高出一些,则只需核算'c ω点的相角裕量。
若满足要求,综合完毕;否则重复步骤(3);如果0<+c g L L 则实际的'c ω低于预选的c ω,可将系统的开环增益提高到0=+c g L L (即将系统的开环比例系数提高20)]([lg1c g L L +--倍)。
基于Matlab的控制系统PID校正的仿真总结
四、结论
PID控制系统结构简单、稳定性好、 工作可靠、调整方便。PID校正响应速 度比P校正和PI校正都要快,但是超调 量比较大。
控制工程与控制理论课程设计讲座
先进PID控制及 其MATLAB仿真
主讲人 付冬梅 自动化系
第1章 数字PID控制
1.1
PID控制原理 连续系统的模拟PID仿真 数字PID控制
程序运行以后,还得到经P、PI、PID校正(用Ziegler-Nichols整定公式计算)系统阶跃给 定响应曲线,如图所示。
图 3-1 Ziegler-Nichols的P、PI、PID控制阶跃响应曲线
由图可见,用Ziegler-Nichols整定公式计算的P、PI、PID校正器对系统 校正后,其阶跃给定响应曲线中的P、PI校正两者响应速度基本相同。 因为这两种校正求出的Kp不同,所以两种校正的被调量终了值不同。PI 校正的超调量比P校正的要小些。PID校正的比前两者的响应速度都要快, 但是超调量最大。
D I
C P
I
C
P
D
D
C
P
I
P
D
I
C
P
D
I
1 G ( s ) K P (1 TD s ) TI s
(2-2)
由式(2-2)可以看出,PID控制是通过三个
参量起作用的。这三个参量取值的大小不同, 就是比例、积分、微分作用强弱的变化。为 了说明每个参数单独变化时对于系统较正时 的影响,特列举以下实例。
1.3.2 连续系统的数字PID控制 仿真
本方法可实现D/A及A/D的功能,符合数字实
时控制的真实情况,计算机及DSP的实时 PID控制都属于这种情况。 采用MATLAB语句形式进行仿真。被控对象 为一个电机模型传递函数: 1
PI、PD、PID控制器系统的Matlab仿真及特点分析
自动控制原理课外作业PI、PD、PID控制器系统的Matlab仿真及特点分析上海大学机自学院自动化系电气工程及其自动化专业**:***学号:********2015年1月13日PID控制器系统的Matlab仿真及特点分析姓名:王文涛学号:12123405 摘要:比例、积分、微分控制简称PID(Propotional-Integrate-Differential)控制,它是工业生产过程中最常用的控制算法,在工业生产过程控制中,PID控制占了85%~90%,随着科学技术的发展,特别是计算机的发展,许多先进的PID 控制涌现出来得到了广泛的应用。
那么这次我们就用matlab来对带有PID控制器的系统进行仿真来研究分析PID控制器的特点。
关键词:PID控制器;matlab仿真;控制系统一、概述PID控制器又称为PID调节器,是按偏差的比例P、积分I、微分进行控制的调节器的简称,它主要针对控制对象来进行参数调节。
PID控制分为模拟式PID 控制和数字式PID控制。
模拟式PID控制是以模拟的连续控制为基础的,理想的模拟式PID控制算法为:u(t)=K p[e(t)+1T I∫e(t)dt+T Dde(t)dt1]式中K p——比例放大系数;T1——积分时间常数;T D——微分时间常数。
另外,e(t)=r(t)−y(t)为系统输入和输出在t时刻的偏差值。
理想PID控制器的传递函数为:G(s)=U(s)E(s)=K p[1+1T I s+T D s]P作用的输出与偏差成比例,成为比例控制作用;I作用的输出与偏差的积分成比例,成为积分控制作用;D作用的输出与偏差的微分成比例,称为微分控制作用。
控制流程图为二.在单位阶跃函数作用下,若反馈系统控制参数的数学模型传递函数为:G O(s)=1(s+1)(S+2)(S+3)(S+4)方块图如下:列写出PI,PD,PID 控制器的数学表达式,并用MTLAB 软件对该系统进行仿真,通过仿真曲线和理论说明相结合的方式,说明三种控制器的特点。
第三章MATLAB及基本PD控制系仿真
采样时间为1ms,采用Z变换进行离散化,进过Z变换后的 离散化对象为: yout(k)=-den(2)yout(k-1)-den(3)yout(k-2)den(4)yout(k-3) +num(2)u(k-1)+num(3)u(k-2)+num(4)u(k-3) 分别对阶跃信号、正弦信号和方波信号进行位置响应,设 计离散PID控制器。其中,S为信号选择变量,S=1时为阶 跃跟踪,S=2为方波跟踪,S=3为正弦跟踪。
PID控制器参数整定
PID控制器参数整定的方法很多,概括起来有两大类: (1)理论计算整定法 主要依据系统的数学模型,经过理论计算确定控制器参数。 这种方法所得到的计算数据未必可以直接使用,还必须通 过工程实际进行调整和修改。 (2)工程整定方法 主要有Ziegler-Nichols整定法、临界比例度法、衰减曲 线法。这三种方法各有特点,其共同点都是通过试验,然 后按照工程经验公式对控制器参数进行整定。但无论采用 哪一种方法所得到的控制器参数,都需要在实际运行中进 行最后调整与完善。 工程整定法的基本特点是:不需要事先知道过程的数学模 型,直接在过程控制系统中进行现场整定;方法简单,计 算简便,易于掌握。
第三章 MATLAB与基本PID控制系统仿真
3.1 PID控制概述 3.2 PID控制系统仿真 作业
3.1 PID控制概述
比例
rin(k)
+ 微分 _ 积分 + 被控对象
yout(k)
PID控制器是一种线性控制器,它根据给定值rin(t)与实 际输出值yout(t)构成控制偏差:
error(t ) rin(t ) yout(t )
PD调节器课程设计
PD调节器课程设计一、课程目标知识目标:1. 学生能理解PD调节器的基本原理,掌握其数学模型及相关公式。
2. 学生能够描述PD调节器在控制系统中的作用,了解其在实际工程中的应用。
3. 学生了解PD调节器参数调整对系统性能的影响,能够分析不同参数设置下的系统响应。
技能目标:1. 学生能够运用所学知识,设计简单的PD调节器控制算法,进行模拟实验。
2. 学生通过实验数据分析,能够调整PD参数,优化系统性能。
3. 学生能够运用图表、报告等形式,清晰表达PD调节器的实验过程和结果。
情感态度价值观目标:1. 学生通过学习PD调节器,培养对自动控制技术的兴趣,激发探索精神。
2. 学生在实验过程中,学会与他人合作,培养团队精神和沟通能力。
3. 学生认识到自动控制技术在国家经济发展和民生改善中的重要性,增强社会责任感和使命感。
课程性质:本课程为自动化与控制学科的基础课程,以理论教学与实践操作相结合的方式进行。
学生特点:学生具备一定的数学基础和物理知识,对自动化技术有一定了解,但缺乏实际操作经验。
教学要求:注重理论与实践相结合,通过实例分析和实验操作,使学生掌握PD调节器的原理和应用。
同时,关注学生的个体差异,鼓励学生积极参与,培养其自主学习和解决问题的能力。
教学过程中,将目标分解为具体的学习成果,以便进行有效的教学设计和评估。
二、教学内容1. PD调节器基本原理:讲解PD调节器的定义、工作原理,分析其数学模型,包括比例(P)和微分(D)控制的作用。
教材章节:第二章第三节“PD调节器的基本原理”2. PD调节器的数学描述:介绍PD调节器的传递函数、状态空间表达式,以及PID控制器与PD调节器的关系。
教材章节:第二章第四节“PD调节器的数学描述”3. PD调节器参数调整:分析PD参数对系统性能的影响,包括稳定性、快速性和超调量等指标。
教材章节:第三章第一节“PD调节器参数调整”4. 实践操作:设计实验,让学生动手搭建PD调节器控制系统,进行参数调整和性能优化。
基于PD的多关节机器人控制器设计与仿真

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊摘要本课题研究一种全局指数收敛的PD自适应轨迹跟踪算法,该算法直接利用机器人期望轨迹,而不需要定义虚拟参考轨迹。
对于给定的跟踪轨迹,期望轨迹可以离线计算,这将大大减少在线计算量。
而且由于没有参数缓慢变化的限制,本课题只需知道动力学模型结构,不需要确定不确定参数,其好处是结构简单,容易实现。
自适应轨迹跟踪算法能够完全克服模型误差产生的轨迹误差,能使有界不确定性干扰产生的轨迹误差任意小。
通过利用MATLAB软件对两关节直接驱动机器人的仿真实验研究,证明了基于PD的多关节机器人控制方法的有效性和对模型不确定性的鲁棒性。
了解控制系统的设计方法,对该控制系统进行研究,以说明系统设计的可行性。
关键词:PD,自适应,跟踪轨迹,仿真┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊AbstractThis subject focus on a PD adaptive tracking algorithm with overall index of convergence, which directly uses desired trajectories of robots to track, without virtual trajectory defined. For a given tracking trajectory, a desired trajectory can be calculated offline and it can reduce computation online. Without a limit of slow changes of parameters, we only have to know dynamics model structure and there is no need to determine uncertain parameters. So the structure is simple and easy to realize. What’s more, this algorithm can completely overcome the trajectory errors arise from model errors to make the trajectory errors arise from boundary uncertain disturbances small. According to research on simulation of directly driven robots with two joints by using MATLAB software, we prove the effectiveness and the robustness to the uncertainness of model of this control method on the basis of PD. Having a good knowledge of the design method of control system, we have a research on the control system to explain the feasibility of system design.Key word: PD;adaptability;tracking trajectory;simulation┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊目录第一章引言1.1 机器人控制简介 (5)1.2 机器人研究背景和发展状况 (6)1.3 本设计的主要内容 (7)第二章PID控制原理及常规PID控制系统2.1 PID控制原理 (8)2.2 连续系统的模拟PID仿真 (8)2.3数字PID控制................................................................ . (9)2.3.1连续系统的数字PID 控制仿真 (10)2.3.2 基于前馈补偿的PID 控制算法及仿真 (11)2.3.3不完全微分PID 控制算法及仿真 (14)2.3.4微分先行PID 控制算法及仿真 (16)2.4 常用的PID控制系统 (19)2.4.1单回路PID控制系统 (19)2.4.2串级PID控制系统 (19)2.4.2.1串级PID 控制原理........................................... (19)2.4.2.2仿真程序及分析 (20)第三章机器人的动力学模型结构与控制3.1机器人控制 (22)3.1.1 刚性机器人控制 (22)3.1.2 柔性机器人控制 (25)3.2动力学模型结构 (26)3.3机器人自适应控制 (27)3.3.1机器人模型参考自适应控制 (28)3.3.2机器人自校正自适应控制 (29)3.3.3基于机器人特性的自适应控制 (31)3.4机器人轨迹跟踪控制研究 (32)3.4.1 机器人的自适应轨迹跟踪算法 (32)3.4.2基于n关节机器人轨迹跟踪迭代学习控制 (36)第四章基于PD的多关节机器人控制器设计及仿真4.1 两关节机器人的PD控制 (42)4.2 控制系统设计方案的选择 (43)4.2.1系统方案选择 (43)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊4.2.2控制器的设计 (43)4.2.3控制器方案的选择 (43)4.3两关节直接驱动机器人的MATLAB仿真 (44)4.3.1 引言 (44)4.3.2 PD控制的两关节系统的仿真模型 (45)4.3.3 系统的仿真、仿真结果的输出及结果分析 (46)第五章结论 (51)参考文献 (52)致谢 (53)附录 (54)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊第一章引言1.1 机器人控制简介机器人控制可以分为刚性机器人控制和柔性机器人控制两种。
液位控制系统设计
2013-2014 学年_第一学期山东科技大学电工电子实验教学中心创新性实验研究报告实验项目名称_液位控制系统设计组长姓名学号联系电话E-mail成员姓名学号成员姓名学号专业班级指导教师及职称2014年月日四、实验内容积分(I)比例积分(PI)比例微分(PD)惯性环节(T)比例积分微分(PID)各典型环节的模拟电路图及输出响应各典型环节名称模拟电路图输出响应比例(P)U0(t)=K (t≥0)其中K=R1/R0 Ui(s)1TSUo(s)Ui (s)TSUi(s)Uo(s) 11TS Uo(s)Ui(s)KKUi(s)Uo(s)TS1TS+1KUi(s)Uo(s)KTS+1 Uo(s)Ui(s)1TSUo(s)1KUi(s)Uo(s)(TS+1)K P TiS1Ui(s)Uo(s)T d S积分(I)U0(t)=tT1(t≥0)其中T=R0C比例积分(PI)U0(t)=tTK1+(t≥0)其中K=R1/R0,T=R1C比例微分(PD)U0(t)=KTδ(t)+K其中δ(t)为单位脉冲函数21RRRK+=2121RRRRT+=惯性环节(T)U0(t)=K(1-e-t/T) 其中K=R1/R0,T=R1C比例积分微分(PID)tTKtTtUipdO1)()(++=δ其中δ(t)为单位脉冲函数Kp=R1/R0 ;T i=R0C1T d=R1R2C2/R0离散系统的采样本实验采用“采样—保持器”LF398芯片,它具有将连续信号离散后以零阶保持器输出信号功能。
其管脚连接如图4-1所示,采样周期T等于输入至LF398第8脚(PU)的脉冲周期,此脉冲由多谐振荡器(用组件MC1555或MC1455及组容元件构成)发生的方波经单稳态电路(用组件MC14538及组容元件构成)产生,改变多谐振荡器的周期,即改变采样周期。
图4-1 LF398连接图图4-2是LF398采样——保持器功能的原理方块图。
图4-2 LF398功能图信号的采样保持电路如图4-3所示。
无线网络控制系统的fuzzy_pd控制器设计与仿真
第11期 2009年11月工矿自动化Industr y and M ine A utomationNo.11 Nov.2009文章编号:1671-251X(2009)11-0033-04无线网络控制系统的Fuzzy-PD 控制器设计与仿真*彭丽萍1, 郭 静2, 彭 晨2(1.金肯职业技术学院计算机与通信工程系,江苏南京 211156;2.南京师范大学信息与控制工程技术研究所,江苏南京 210042)摘要:基于网络控制仿真软件T rueT ime 以及M atlab/Simulink 环境构建了一个无线网络控制系统仿真模型,对系统模型和控制策略进行了仿真实验;设计了一种Fuzzy -PD 控制器,提出了一种无线网络控制器参数离线优化的方法,即利用IT AE 作为重要参考指标对Fuzzy -PD 控制器进行离线调整,通过调整Fuzzy -PD 控制器的转换参数改善控制器在不同网络带宽占用率下的控制性能。
仿真结果验证了Fuzzy-PD 控制算法优于传统的PD 控制算法和Fuzzy 控制算法。
关键词:无线网络控制系统;仿真模型;控制策略;参数优化;Fuzzy-PD;ITAE;Matlab;T rueT ime 中图分类号:TP273 文献标识码:ADesign of Fuzzy PD Controller of Wireless Netw orked Control Syst em andIts SimulationPENG Li ping 1, GU O Jing 2, PENG Chen 2(1.Dept.of Computer and Comm unication Eng ineering of Jinken Vocational and T echnical College,Nanjing 211156,China. 2.Institute o f Information and Co ntrol T echnolo gy ofNanjing N ormal Univer sity,Nanjing 210042,China)Abstract :A simulation model of w ireless netw orked control sy stem w as established on the basis of TrueTime and M atlab/Simulink,and so me simulatio n ex periments w ere perform ed based on the sy stem model and co ntro l strategies.A Fuzzy PD controller w as desig ned,and a m ethod of param eter optimization off line w as proposed by using ITAE as an im po rtant reference index.T he control perform ance w as impr oved by adjusting the converted parameter o f the Fuzzy PD co ntroller based o n differ ent netw ork bandw idth occupied rates.T he advantage of the Fuzzy PD contro l alg orithm w as validated as compar ed w ith PD and Fuzzy contr ol alg orithm by the simulation results.Key words :wireless netw orked co ntro l system ,simulation m odel,control str ategy ,parameter optimization,Fuzzy PD,IT AE,M atlab,TrueTim e 收稿日期:2009-07-12*基金项目:国家自然科学基金资助项目(60704024)作者简介:彭丽萍(1981-),女,硕士,助教,研究方向为网络控制及其仿真。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验八控制系统的PD 校正设计及仿真一、实验目的1.用频率综合法对系统进行综合设计;2.学习用MA TLAB 软件对系统进行仿真。
二、实验设计原理与步骤1.设计原理超前校正(亦称PD 校正)的传递函数为:)1(11)(>++=ααTs Ts S G C 其对数频率特性如图8-1所示,超前校正能够产生相位超前角,超前校正的强度可由参数α表征。
超前校正的相频特性函数是:Tarctg T arctg ωαωωθ-=)(最大相移点位于对数频率的中心点,即:T m 11⋅=αω最大相移量为:11arcsin1)(+-=-==ααααωθθarctarct m m 或者11sin +-=ααθm mm θθαsin 1sin 1-+=容易求出,在m ω点有:αωlg 10)(=m L 2.设计步骤基于频率法综合超前校正的步骤是:(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;(2)根据动态指标要求预选c ω,从Bode 图上求出系统固有部分在c ω点的相角;(3)根据性能指标要求的相角裕量,确定在c ω点是否需要提供相角超前量。
如需要,算出需要提供的相角超前量m θ;(4)如果所需相角超前量不大于60度,按mmθθαsin 1sin 1-+=式求出超前校正强度α;(5)令)(1T c m αωω==从而求出超前校正的两个转折频率Tα1和T1;(6)计算系统固有部分在c ω点的增益)(dB L g ;及超前校正装置在c ω的增益)(dB L c 。
如果0>+c g L L 则校正或系统的截止频率'c ω比预选的值要高。
如果高出较多,应采用滞后超前校正,如果只是略高出一些,则只需核算'c ω点的相角裕量。
若满足要求,综合完毕;否则重复步骤(3);如果0<+c g L L 则实际的'c ω低于预选的c ω,可将系统的开环增益提高到0=+c g L L (即将系统的开环比例系数提高20)]([lg1c g L L +--倍)。
超前校正的主要作用是产生超前相角,可用于补偿系统固有部分在截止角频率c ω附近的相角滞后,以提高系统的相角稳定裕量,改善系统的动态特性。
三、实验内容练习8-1设计增益K ,使系统的相位裕度为60°。
num =[10]den =[110]g =tf(num,den)bode(g);[mag phase w]=bode(g);[gm pm wcg wcp]=margin(mag,phase,w)margin(g)a =(1+sin(49.1*pi/180))/(1-sin(49.1*pi/180))l=10*log10(a);wm =spline(20*log10(mag),w,-l)t =1/(wm*sqrt(a))at =a*t num1=[at 1]den1=[t,1]g1=tf(num1,den1)num2=[10*at 10]den2=conv([t,1],[110])g2=tf(num2,den2)bode(g2);[mag2phase2w2]=bode(g2);[gm2pm2wcg2wcp2]=margin(mag2,phase2,w2)Grid习8-2设被控对象开环传递函数为:设计技术指标要求:系统斜坡输入稳态误差e ss =0.05;系统的相位稳定裕度γ045≥;系统的幅值稳定裕度h db 10≥要求:)2(4)(+=S S k S G g(1)设计满足上述要求的超前校正装置;(2)画出校正前后的Bode图;(3)用Simulink对原系统和校正后的系统进行仿真,画出校正前后的阶跃响应图;(4)分析设计结果。
num=20;den=[120]g=tf(num,den);bode(g);%step(g1)[mag phase w]=bode(g);[gm pm wcg wcp]=margin(mag,phase,w)margin(g)a=(1+sin(30*pi/180))/(1-sin(30*pi/180))l=10*log10(a)wm=spline(20*log10(mag),w,-l)%找对应频率t=1/(wm*sqrt(a))at=a*tnum1=[at1];den1=[t1];g1=tf(num1,den1)hold onnum2=[20*at20];den2=conv([t1],[120]);g2=tf(num2,den2)hold onbode(g2)[mag2phase2w2]=bode(g2);[gm2pm2wcg2wcp2]=margin(mag2,phase2,w2) Grid练习8-3设被控对象开环传递函数为:)101.0)(11.0()(++=s S S KS G g 系统的静态速度误差系数1100-≥s Kv ,相位稳定裕度030≥ϕ,截止角频率c ω≥451-s 。
要求:(1)设计满足上述要求的超前控制器;(2)画出校正前后的Bode 图;(3)用Simulink 对原系统和校正后的系统进行仿真,画出校正前后的阶跃响应图;(4)分析设计结果。
num =[100]den =conv([0.110],[0.011])g=tf(num,den)bode(g)[mag phase w]=bode(g);[gm pm wcg wcp]=margin(mag,phase,w) margin(g)a=(1+sin(41.5*pi/180))/(1-sin(41.5*pi/180))l=10*log10(a)wm=spline(20*log10(mag),w,-l)t=1/(wm*sqrt(a))at=a*tnum1=[at1]num1=[t1]g1=tf(num1,den1)num2=[100*at100]den2=conv([t1],den)g2=tf(num2,den2)bode(g2)[mag2phase2w2]=bode(g2);[gm2pm2wcg2wcp2]=margin(mag2,phase2,w2) grid实验九控制系统的PI 校正设计及仿真一、实验目的1.应用频率综合法对系统进行PI 校正综合设计;2.学习用MA TLAB 对系统性能进行仿真设计、分析;二、实验设计原理与步骤1.设计原理滞后校正(亦称PI 校正)的传递函数为:)1(11)(>++=ββTs Ts S G C 其对数频率特性如图9-1所示,参数β表征滞后校正的强度。
2.设计步骤基于频率法的综合滞后校正的步骤是:(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;(2)根据动态指标要求试选c ω,从Bode 图上求出试选的c ω点的相角,判断是否满足相位裕度的要求(注意计入滞后校正带来的012~5的滞后量),如果满足,转下一步。
否则,如果允许降低c ω,就适当重选较低的c ω;(3)从图上求出系统固有部分在c ω点的开环增益Lg (c ω)。
如果Lg (c ω)>0令Lg (c ω)=20lg β,求出β,就是滞后校正的强度,如果Lg (c ω)〈0,则无须校正,且可将开环比例系数提高。
(4)选择C T ωω101~51(12==,进而确定Tβω11=。
(5)画出校正后系统的Bode 图,校核相位裕量。
滞后校正的主要作用是降低中频段和高频段的开环增益,但同时使低频段的开环增益不受影响,从而达到兼顾静态性能与稳定性。
它的副作用是会在c ω点产生一定的相角滞后。
三、实验内容练习9-1设系统原有开环传递函数为:)15.0)(1()(++=S S S KS G g 系统的相位裕度γ040≥系统的开环比例系数K=5S -1截止频率为c ω=0.5S -1要求:(1)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的Bode 图(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。
练习9-2设被控对象开环传递函数为:)5(10)(+=S S S G g 系统的相位裕度γ040≥系统斜坡输入稳态误差e ss =0.05;截止频率为c ω=21/S要求:(1)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的Bode 图;(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。
练习9-3已知单位反馈系统被控对象开环传递函数为:)12.0)(11.0(1)(00++=s S S K S G 试用BODE 图设计方法对系统进行滞后串联校正设计,使之满足:(1)在单位斜坡信号r (t )=t 的作用下,系统的速度误差系数K V 130-≥s ;(1)系统校正后剪切频率ωC 13.2-≥s ;(3)系统斜校正后相角裕度γ040≥要求:(1)用频率法设计满足上述要求的串联滞后校正控制器;(2)画出校正前后的Bode 图;(3)用Simulink 对校正前后的闭环系统进行仿真,求出其阶跃响应;(4)分析设计效果。
实验十控制系统的PID 校正设计及仿真一、实验目的1.学会用MA TLAB 对系统进行仿真;2.应用频率综合法对系统进行PID 校正综合。
二、设计原理与步骤1.设计原理超前校正的主要作用是增加相角裕量,改善系统的动态响应特性。
滞后校正的作用是改善系统的静态特性,两种校正结合起来就能同时改善系统的动态和静态特性。
滞后超前校正(亦称PID 校正)综合了前两种校正的功能。
滞后超前校正(亦称PID 校正)的传递函数为:)(,)1()1)(1()(121212T T S T S T S G C ααββα>>≥++++=它相当于一个滞后校正与一个超前校正相串联,其对数频率特性如图10-1所示:2.设计步骤基于频率法综合滞后-超前校正的步骤是:(1)根据静态指标要求,确定开环比例系数K ,并按已确定的K 画出系统固有部分的Bode 图;(2)根据动态指标要求确定c ω,检查系统固有部分在c ω的对数幅频特性的斜率是否为-2,如果是,求出c ω点的相角;(3)按综合超前校正的步骤(3)~(6)综合超前部分G C1(S )(注意在确定m θ时要计入滞后校正带来的0012~5的相角滞后量)。
在第(6)步时注意,通常)()(c c c g L L ωω+比0高出很多,所以要引进滞后校正;(4)令βlg 20=)()(c c c g L L ωω+求出β;(5)按综合滞后校正的步骤(4)~(5)综合滞后部分)(2S G c ;(6)将滞后校正与超前校正串联在一起,构成滞后超前校正:)()()(21S G S G S G c c c ⋅=三、实验内容练习10-1反馈控制系统的开环传递函数为:)105.0)(11.0()(++=S S S K S G 要求:(1)速度偏差系数Kv 50≥(2)相位裕度γ%5400±=(3)增益穿越频率%510±=c ω要求:(1)设计满足上述要求的滞后-超前控制器;(2)用Simulink 进行仿真;(3)画出校正前后的Bode 图(4)分析讨论设计过程及结果。