二维抛物线方程数值解法(ADI隐式交替法)方法
CO2驱油数值模拟研究现状与发展趋势
注气驱油数值模拟方法研究现状与发展趋势姬泽敏,秦积舜,李实,廉黎明(提高石油采收率国家重点实验室—中国石油勘探开发研究院,北京市 100083)摘要:注气驱油技术是提高石油采收率的重要方法之一,应用和发展前景广阔。
气驱油过程伴随着油气体系间的组分传质和系统压力变化,进而引起油气体系的相态转化,使得注气驱油过程的物理化学现象的表征和数学描述变得十分复杂,至今尚未形成统一和精确的油气体系相态表征和描述方法。
通过考察国内外已有的相关数学模型和计算模拟方法,本文较为系统的梳理了注气驱油数值模拟方法的发展历程,评价了现有方法的优缺点,并结合我国油藏储层及流体特征,提出了适合中国油藏特点的注气驱油数值模拟方法的发展方向。
关键词:注气驱油技术;油气体系;数值模拟;组分传质;相态Research Status of Gas Flooding NumericalSimulation and Its Development TrendJi Zemin1,Qin Jishun,Li Shi,Lian Liming(The State Key Laboratory of Enhanced Oil Recovery—RIPED, Beijing 100083,China)Abstract: Gas flooding technology is one of the pivotal EOR methods, which has a broad prospect of application and development. However, mass transfer and change of system pressure during the process of gas flooding lead to the change of phase behavior, which draws great difficulties to the mathematical description and characterization of physical and chemical phenomenon during the process, so far there has not been a set of uniform and accurate methods to describe and characterize the phase behavior of oil and gas system. According to the mentioned above, based on the investigation of several gas flooding numerical simulation methods at home and abroad, this paper hackled the development process of the gas flooding numerical simulation methods, evaluated the advantages and disadvantages of these methods. Finally, combined with the characters of reservoirs and fluid, development direction of gas flooding numerical simulation with Chinese characteristics was proposed.Key words:gas flooding,oil-gas system,numerical simulation,compositional transfer,phase 1收稿日期:第一作者简介:姬泽敏(1985—),男,博士研究生,主要从事注气提高采收率技术及数值模拟研究。
高中数学学习中的抛物线与双曲线方程求解方法
高中数学学习中的抛物线与双曲线方程求解方法在高中数学学习中,抛物线与双曲线是重要的二次函数的图像形式。
学生们需要掌握求解抛物线和双曲线方程的方法,以便能够准确地描述并解决与这些图形相关的问题。
本文将介绍高中数学学习中抛物线与双曲线方程求解的方法。
首先,我们来讨论抛物线的方程求解。
一般来说,抛物线的方程通常是二次函数的形式:y = ax² + bx + c。
在求解抛物线方程时,我们通常要考虑以下几种情况:一种情况是已知抛物线上的三个点,我们需要确定抛物线的方程。
对于已知三个点(x₁,y₁)、(x₂,y₂)、(x₃,y₃),我们可以建立三个方程:(1) y₁ = ax₁² + bx₁ + c(2) y₂ = ax₂² + bx₂ + c(3) y₃ = ax₃² + bx₃ + c通过解这个方程组,我们可以找到抛物线的方程。
另一种常见情况是已知抛物线的顶点和一点,需要确定抛物线的方程。
对于已知顶点(h,k)和一点(x₁,y₁),我们可以通过将这两个点代入抛物线的一般方程,得到下面的方程:(1) y₁ = a(x₁ - h)² + k通过解这个方程,我们可以得到抛物线的方程。
在实际问题中,我们常常需要求解与抛物线相关的问题。
例如,给定一个抛物线,我们需要找到它的焦点和准线。
对于抛物线方程 y = ax² + bx + c,我们可以通过求解以下方程得到焦点(p,q)和准线的方程:(1) p = -b / (2a)(2) q = c - (b² - 1) / (4a)通过求解这两个方程,我们可以找到焦点和准线的方程。
接下来,我们转到双曲线的方程求解。
与抛物线类似,双曲线的方程也是二次函数的形式:y = a/x。
在求解双曲线方程时,我们同样需要考虑不同的情况。
一种情况是已知双曲线上的两个点,我们需要确定双曲线的方程。
对于已知两个点(x₁,y₁)和(x₂,y₂),我们可以建立以下方程:(1) y₁ = a/x₁(2) y₂ = a/x₂通过解这个方程组,我们可以找到双曲线的方程。
高中数学解二次曲线方程的常用技巧和注意事项
高中数学解二次曲线方程的常用技巧和注意事项在高中数学学习中,解二次曲线方程是一个重要的内容。
掌握解二次曲线方程的常用技巧和注意事项,不仅可以帮助我们更好地理解和应用数学知识,还可以提高解题的效率和准确度。
本文将介绍一些常用的解二次曲线方程的技巧和需要注意的事项,并通过具体的题目进行举例,帮助读者更好地理解和掌握。
一、一元二次方程的解法在解二次曲线方程时,首先要确定方程中未知数的个数。
如果方程中只有一个未知数,我们称之为一元二次方程。
解一元二次方程的常用方法有因式分解法、配方法和求根公式法。
以因式分解法为例,我们来看一个具体的例子:求解方程$x^2-5x+6=0$。
首先,我们观察方程中的系数,发现$a=1$,$b=-5$,$c=6$。
然后,我们寻找两个数,使得它们的和等于$b$,乘积等于$c$。
在这个例子中,我们可以找到两个数2和3,满足条件。
因此,我们可以将方程进行因式分解:$(x-2)(x-3)=0$。
根据乘法零原理,我们知道当两个数的乘积等于0时,至少有一个数等于0。
因此,我们可以得到两个解:$x=2$和$x=3$。
二、二元二次方程的解法除了一元二次方程,高中数学中还会遇到二元二次方程。
解二元二次方程的常用方法有代数法和图形法。
以代数法为例,我们来看一个具体的例子:求解方程组$\begin{cases}x^2+y^2=25\\x-y=3\end{cases}$。
首先,我们可以将第二个方程变形为$x=y+3$,然后将其代入第一个方程中,得到$(y+3)^2+y^2=25$。
展开并整理后,我们可以得到$2y^2+6y-16=0$。
接下来,我们可以使用一元二次方程的解法,求解这个二次方程。
解得$y=-4$或$y=2$。
将这两个解分别代入$x=y+3$,得到$x=-1$和$x=5$。
因此,方程组的解为$(-1,-4)$和$(5,2)$。
三、注意事项在解二次曲线方程时,还需要注意一些细节和特殊情况。
1. 方程的判别式:对于一元二次方程$ax^2+bx+c=0$,判别式$D=b^2-4ac$可以告诉我们方程的解的性质。
二维抛物型方程的交替方向隐格式
二维抛物型方程的交替方向隐格式二维抛物型方程的交替方向隐格式是一种数值解法,用于求解二维抛物型方程的数值解。
这种解法将二维问题分解为两个一维问题,并采用隐式差分方法来求解。
具体来说,二维抛物型方程可以表示为:u_t = a^2 u_{xx} + b^2 u_{yy} + f(x,y,u)其中,u是待求解的函数,t是时间,a和b是两个不同的参数,f是右侧的非线性函数。
为了求解这个问题,我们可以采用交替方向隐式差分方法,将问题分解为两个一维问题:1、在x方向上,从左到右扫描每一行数据,更新每个点的u值。
这个过程可以使用隐式差分方法来实现:u^[i,j]^(n+1) = u^[i,j]^(n) + dt a^2 (u^[i+1,j]^(n) - 2u^[i,j]^(n) + u^[i-1,j]^(n)) / h^2 + dt f^[i,j]^(n) 其中,u^[i,j]^(n)表示第n个时间步中,位置为(x[i],y[j])的点的u值,h是x方向上的步长,dt是时间步长,f^[i,j]^(n)表示第n个时间步中,位置为(x[i],y[j])的点上的非线性函数f的值。
2. 在y方向上,从上到下扫描每一列数据,更新每个点的u值。
这个过程也可以使用隐式差分方法来实现:u^[i,j]^(n+1) = u^[i,j]^(n) + dt b^2 (u^[i,j+1]^(n) - 2u^[i,j]^(n) + u^[i,j-1]^(n)) / h^2 + dt f^[i,j]^(n) 其中,u^[i,j]^(n)表示第n个时间步中,位置为(x[i],y[j])的点的u值,h是y方向上的步长,dt是时间步长,f^[i,j]^(n)表示第n个时间步中,位置为(x[i],y[j])的点上的非线性函数f的值。
通过交替更新每个点的u值,我们可以逐步逼近方程的数值解。
这种解法具有二阶精度和稳定性,可以应用于多种二维抛物型方程的问题。
探讨高中数学抛物线的解题方法与技巧
探讨高中数学抛物线的解题方法与技巧高中数学中,抛物线是一种非常重要的曲线,对于学习与应用数学都具有重要意义。
本文将对高中数学抛物线的解题方法与技巧进行详细探讨,帮助同学们更好地理解与掌握这一知识点。
一、了解抛物线的基本特征抛物线是一种平面曲线,具有对称轴、顶点、焦点等基本特征。
在解析几何中,常用的抛物线方程有三种形式。
顶点形式、一般形式与焦点形式。
不同形式的方程适用于不同的题型,因此学生需要熟练掌握它们的转换与运用。
二、求抛物线的焦点与顶点1.平移法求焦点。
通过将抛物线平移至标准位置(顶点为原点),可以简化求解焦点的过程。
平移法还可以被运用在其他抛物线的应用题中,如求凸面镜或抛物面的顶点与焦点位置等。
2.定义法求焦点。
对于给定的抛物线方程,可以利用定义法求解焦点。
定义法是以准线和焦点的定义出发,利用准线与焦点到平面上任意一点的距离和定义(如焦点到准线距离等于焦点到该点的距离)得到焦点的坐标。
3.判断抛物线的开口方向。
可以通过方程的二次项系数的符号来判断抛物线的开口方向。
当二次项系数大于零时,抛物线开口向上;当二次项系数小于零时,抛物线开口向下。
三、求抛物线与坐标轴交点通过解方程来求解抛物线与坐标轴的交点,这是很常见的题型。
有两种常用的方法。
1.因式分解法。
将抛物线的方程进行因式分解后,可以得到解析解或根的个数。
进一步,通过观察与分析,可以得出与坐标轴交点的具体坐标。
2.二次函数求根公式。
通过应用二次函数求根公式,可以得到抛物线与坐标轴交点的解析解。
需要注意的是,二次函数求根公式只适用于已经化为标准形式的抛物线。
四、求抛物线的切线与法线求抛物线的切线与法线是一类较难的题型,需要熟练掌握相关的知识与求解方法。
下面将介绍两种常见的方法。
1.切线与法线的斜率法。
通过斜率法可以求得切线与法线的斜率表达式。
具体而言,对于给定的抛物线方程,我们可以通过计算其导数来求得切线或法线的斜率表达式,然后利用该斜率表达式求解切线或法线的方程。
ADI(交替方向隐格式)求解二维抛物方程(含matlab程序)
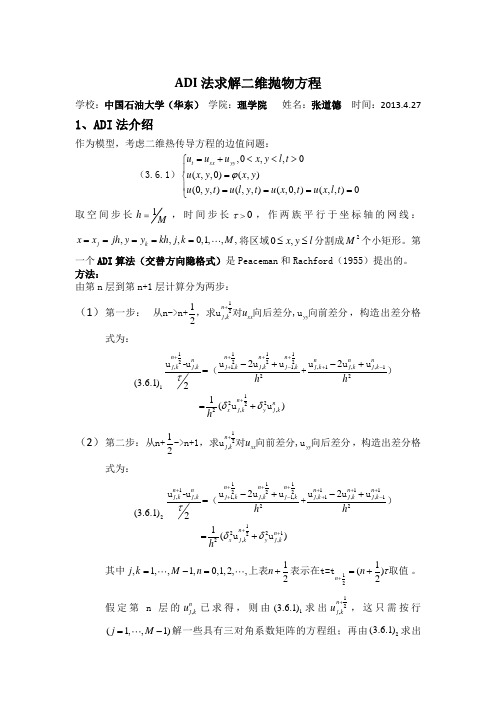
ADI 法求解二维抛物方程学校:中国石油大学(华东) 学院:理学院 姓名:张道德 时间:2013.4.271、ADI 法介绍作为模型,考虑二维热传导方程的边值问题:(3.6.1),0,,0(,,0)(,)(0,,)(,,)(,0,)(,,)0t xx yy u u u x y l t u x y x y u y t u l y t u x t u x l t ϕ=+<<>⎧⎪=⎨⎪====⎩取空间步长1hM,时间步长0,作两族平行于坐标轴的网线:,,,0,1,,,j k x x jh y y kh j k M =====将区域0,x y l ≤≤分割成2M 个小矩形。
第一个ADI 算法(交替方向隐格式)是Peaceman 和Rachford (1955)提出的。
方法:由第n 层到第n+1层计算分为两步:(1) 第一步: 12,12n j k xx yy u +从n->n+,求u 对向后差分,u 向前差分,构造出差分格式为:1(3.6.1)11112222,,1,,1,,1,,1221222,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hhhτδδ+++++-+-+-+-+=+uu uuuu u u (+)u u(2) 第二步:12,12n j k xx yy u +从n+->n+1,求u 对向前差分,u 向后差分,构造出差分格式为:2(3.6.1)1111111222,,1,,1,,1,,12212212,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hh hτδδ++++++++-+-++-+-+=+uu uuuu u u (+)u u其中1211,1,,1,0,1,2,,()22n j k M n n n τ+=-=+=+上表表示在t=t 取值。
二维抛物型方程的交替方向隐格式

二维抛物型方程的交替方向隐格式在数学领域中,二维抛物型方程是一类重要的偏微分方程,它们在众多实际问题的数学建模中起着关键作用。
对于这类方程,交替方向隐格式是一种常用且有效的数值求解方法。
本文将详细介绍二维抛物型方程及其交替方向隐格式的原理和应用,希望能为读者提供一份生动、全面且有指导意义的参考材料。
首先,我们来了解什么是二维抛物型方程。
通常,二维抛物型方程可以表示为以下形式:∂u/∂t = α(∂²u/∂x² + ∂²u/∂y²) + βu + f(x, y, t)其中,u是未知函数,t是时间变量,x和y是空间变量,α和β是常数,f(x, y, t)是已知函数。
二维抛物型方程广泛应用于物理、工程、生物等领域的问题求解,比如热传导、扩散、扩散反应等。
为了求解这类方程,数学家们开发了各种求解方法,交替方向隐格式是其中一种。
交替方向隐格式是一种时间和空间交替迭代的求解方法,它通过将二维抛物型方程离散化为一组代数方程,然后通过迭代求解这些代数方程得到数值解。
具体来说,交替方向隐格式先将时间方向离散化,将时间变量t划分为一系列离散时间步长。
然后,对于每个时间步长,交替方向隐格式将二维抛物型方程中的时间导数∂u/∂t进行近似。
最常用的近似方法是向后差分格式,即用u(n+1) - u(n)来近似∂u/∂t,其中u(n)表示第n个时间步长的数值解,u(n+1)表示第n+1个时间步长的数值解。
这样,二维抛物型方程可以离散为一组代数方程。
接下来,交替方向隐格式将空间方向离散化,将空间变量x和y划分为一系列离散网格点。
然后,在空间离散化的基础上,通过引入交替方向(例如,先按x方向更新,再按y方向更新,或者反之)和隐格式(例如,使用向后差分格式近似二阶导数项),将二维抛物型方程中的空间导数进行近似。
通过交替迭代求解这组离散代数方程,我们可以得到二维抛物型方程的数值解。
当离散网格点的数量足够多时,数值解将趋近于方程的解。
二维抛物线方程数值解法(ADI隐式交替法)方法
ADI隐式交替法三种解法及误差分析(一般的教材上只说第一种)理论部分参看孙志忠:偏微分方程数值解法注意:1.最好不要直接看程序,中间很多公式很烦人的(一定要小心),我写了两天,终于写对了。
2.中间:例如r*(u(i-1,m1,k)+u(i+1,m1,k))形式写成分形式:r*u(i-1,m1,k)+r*u(i+1,m1,k)后面会出错,我也不是很清楚为什么,可能由于舍入误差,或者大数吃掉小数的影响。
3.下面有三个程序4.具体理论看书,先仔细看书(孙志忠:偏微分方程数值解法)或者网上搜一些理论。
Matlab程序:1.function [u u0 p e x y t]=ADI1(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u0(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))]; u0([1 m2+1],j,k)=[exp(0.5*x(j)-t0(k)) exp(0.5*(1+x(j))-t0(k))];endendr=h2/(h1*h1);r1=2*(1-r);r2=2*(1+r);for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r2*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+...h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r2*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend2.function [u p e x y t]=ADI2(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(D'Yakonov交替方向隐格式)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u'(i,j,k)(引入的过渡层),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;y=(0:m2)*h1+0;t=(0:n)*h2+0;t0=(0:n)*h2+1/2*h2;%定义t0是为了f(x,y,t)~=0的情况% for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));%编程时-t0(k)写成了+t0(k),导致错误;endendend%初始条件for i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endend%边界条件for k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))];endendr=h2/(h1*h1);r4=1+r;r5=r/2;for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=r4*u(i,[1 m1+1],k+1)-r5*(u(i-1,[1 m1+1],... k+1)+u(i+1,[1 m1+1],k+1));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendr1=r-r*r;r2=2*(r-1)*(r-1);r3=r*r/2;for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=2*r4*ones(1,m1-1);d(1)=r*u0(i,1,k)+r1*(u(i-1,2,k)+u(i,1,k)+u(i+1,2,k)+...u(i,3,k))+r2*u(i,2,k)+r3*(u(i-1,1,k)+...u(i+1,1,k)+u(i-1,3,k)+u(i+1,3,k))+2*h2*f(i,2,k);for l=2:m1-2d(l)=r1*(u(i-1,l+1,k)+u(i,l,k)+u(i+1,l+1,k)+...u(i,l+2,k))+r2*u(i,l+1,k)+r3*(u(i-1,l,k)+...u(i+1,l,k)+u(i-1,l+2,k)+u(i+1,l+2,k))+2*h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r1*(u(i-1,m1,k)+u(i,m1-1,k)+...u(i+1,m1,k)+u(i,m1+1,k))+r2*u(i,m1,k)+...r3*(u(i-1,m1-1,k)+...u(i+1,m1-1,k)+u(i-1,m1+1,k)+u(i+1,m1+1,k))+2*h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);end%回代过程%u0(i,m1,k)=d(m1-1)/b(m1-1);for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=2*r4*ones(1,m2-1);d(1)=r*u(1,j,k+1)+2*u0(2,j,k);for l=2:m2-2d(l)=2*u0(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=2*u0(m2,j,k)+r*u(m2+1,j,k+1);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend3.function [u u0 p e x y t]=ADI5(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,未截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u1(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendr=h2/(h1*h1);r1=2*(1-r);r2=r/4;r3=2*(1+r);for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=u1(i,[1 m1+1],k)-r2*(u(i-1,[1 m1+1],k+1)-...2*u(i,[1 m1+1],k+1)+u(i+1,[1 m1+1],k+1)-u(i-1,[1 m1+1],k)+...2*u(i,[1 m1+1],k)-u(i+1,[1 m1+1],k));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendfor k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组%for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r3*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+... h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r3*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解 e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend[up e x y t]=ADI2(0.01,0.001,100,100,1000);surf(x,y,e(:,:,1001)) t=1的误差曲面下面是三种方法的误差比较:1.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)(t=1时的误差)2.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) surf(x,y,e(:,:,11))(表示t=1时的误差)下面是相关数据:1: [u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00040947 0.00025182 0.00019077 0.00017112 0.000176040 0.00057359 0.00042971 0.00035402 0.00032565 0.000336280 0.00066236 0.00054689 0.00047408 0.00044596 0.000462670 0.00072152 0.00062001 0.00055081 0.00052442 0.000545530 0.00076164 0.0006576 0.00058522 0.00055732 0.000579840 0.00078336 0.00065993 0.00057557 0.00054161 0.000562090 0.00078161 0.00061872 0.00051646 0.00047429 0.000489640 0.00073621 0.0005148 0.00039979 0.00035439 0.000363130 0.00056964 0.00031688 0.00022051 0.0001884 0.000191920 0 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00027006 0.00016305 0.00012104 0.0001071 0.000109950 0.00037754 0.00027817 0.0002253 0.00020483 0.000211160 0.00043539 0.00035386 0.00030207 0.00028124 0.00029140 0.00047398 0.00040104 0.00035113 0.00033111 0.000344050 0.0005003 0.00042535 0.00037309 0.0003519 0.000365710 0.00051479 0.00042699 0.00036681 0.00034164 0.00035410 0.00051415 0.00040056 0.00032887 0.0002985 0.000307640 0.00048504 0.0003335 0.00025411 0.0002221 0.000227060 0.00037609 0.00020532 0.00013956 0.00011718 0.000119020 0 0 0 0 03.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 8.6469e-006 1.4412e-005 1.8364e-005 2.091e-005 2.2174e-0050 1.4412e-005 2.4777e-005 3.2047e-005 3.6716e-005 3.8961e-0050 1.8364e-005 3.2047e-005 4.1789e-005 4.8054e-005 5.1008e-0050 2.091e-005 3.6716e-005 4.8054e-005 5.5353e-005 5.8764e-0050 2.2174e-005 3.8961e-005 5.1008e-005 5.8764e-005 6.2389e-0050 2.2118e-005 3.8698e-005 5.0523e-005 5.8126e-005 6.171e-0050 2.055e-005 3.5581e-005 4.6157e-005 5.2942e-005 5.6197e-0050 1.707e-005 2.8951e-005 3.7128e-005 4.2365e-005 4.4952e-0050 1.0851e-005 1.7698e-005 2.2265e-005 2.5203e-005 2.672e-0050 0 0 0 0 01.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)Columns 7 through 110 0 0 0 00.00020348 0.00026228 0.00038338 0.00066008 00.00038607 0.00048321 0.00064717 0.00091668 00.00052635 0.00064203 0.00081637 0.0010517 00.0006174 0.00074272 0.00092111 0.0011417 00.00065651 0.00078964 0.00097724 0.0012051 00.00064051 0.00078116 0.00098594 0.0012433 00.00056474 0.00070822 0.00093332 0.0012478 00.00042547 0.00055526 0.00078616 0.0011844 00.00022735 0.00030946 0.00049004 0.00092402 00 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)Columns 7 through 110 0 0 0 00.00012826 0.00016798 0.00024986 0.00043637 00.00024444 0.00031023 0.00042173 0.00060513 00.00033401 0.00041257 0.00053179 0.00069358 00.00039216 0.00047742 0.00059986 0.00075263 00.00041704 0.00050761 0.00063642 0.00079439 00.00040657 0.0005021 0.00064226 0.00081984 00.00035784 0.000455 0.00060828 0.00082334 00.00026866 0.00035628 0.00051263 0.0007824 00.00014262 0.00019789 0.00031956 0.0006113 00 0 0 0 0 3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) Columns 7 through 110 0 0 0 02.2118e-005 2.055e-005 1.707e-005 1.0851e-005 03.8698e-005 3.5581e-005 2.8951e-005 1.7698e-005 05.0523e-005 4.6157e-005 3.7128e-005 2.2265e-005 05.8126e-005 5.2942e-005 4.2365e-005 2.5203e-005 06.171e-005 5.6197e-005 4.4952e-005 2.672e-005 06.1116e-005 5.5803e-005 4.4817e-005 2.6785e-005 05.5803e-005 5.1239e-005 4.1529e-005 2.5153e-005 04.4817e-005 4.1529e-005 3.42e-005 2.126e-005 02.6785e-005 2.5153e-005 2.126e-005 1.3869e-005 00 0 0 0 0。
二维抛物线方程数值解法方法

二维抛物线方程数值解法方法二维抛物线方程是数学中常见的偏微分方程之一,表示一个二维区域中的传热、扩散、波动等现象。
求解二维抛物线方程通常需要使用数值解法,其中ADI(Alternating Direction Implicit)隐式交替法是一种有效的数值解法之一、本文将详细介绍ADI隐式交替法的原理和步骤。
首先,我们来看一下二维抛物线方程的一般形式:∂u/∂t=α(∂²u/∂x²+∂²u/∂y²)+f(x,y,t)其中u(x,y,t)是未知函数,表示二维区域中的一些物理量(如温度),α是扩散系数,f(x,y,t)是源(即外力项)。
ADI隐式交替法的基本思想是将偏微分方程中的时间导数项进行分离,然后通过交替方向的半隐式差分逼近来求解。
具体步骤如下:1.将时间导数项进行分离,得到两个互相独立的方程:∂u/∂t=α(∂²u/∂x²)+α(∂²u/∂y²)+f(x,y,t)等价于:∂u/∂t=α(∂²u/∂x²)+f(x,y,t),考虑到y方向上的导数已经被分离出来。
∂u/∂t=α(∂²u/∂y²)+f(x,y,t),考虑到x方向上的导数已经被分离出来。
2. 对第一个方程应用隐式差分(比如Crank-Nicolson差分格式),得到一个关于未知函数u的线性方程组Ax=b。
3.利用ADI思想,对第二个方程同样进行隐式差分,得到另一个关于未知函数u的线性方程组Ay=c。
4.对线性方程组Ax=b和Ay=c进行求解,得到u的一个时间层的近似解。
5.重复步骤2至4,直到得到整个时间区间内的数值解。
ADI隐式交替法的关键在于递归地求解两个互相独立的线性方程组。
在每个时间步长中,先求解一个方向(比如x方向)上的方程组,然后用该方程组的解代入另一个方向(比如y方向)的方程组中求解。
通过交替进行,可以逼近二维抛物线方程的解。
二维抛物方程的有限差分法
二维抛物方程的有限差分法二维抛物方程的有限差分法摘要二维抛物方程是一类有广泛应用的偏微分方程,由于大部分抛物方程都难以求得解析解,故考虑采用数值方法求解。
有限差分法是最简单又极为重要的解微分方程的数值方法。
本文介绍了二维抛物方程的有限差分法。
首先,简单介绍了抛物方程的应用背景,解抛物方程的常见数值方法,有限差分法的产生背景和发展应用。
讨论了抛物方程的有限差分法建立的基础,并介绍了有限差分方法的收敛性和稳定性。
其次,介绍了几种常用的差分格式,有古典显式格式、古典隐式格式、Crank-Nicolson隐式格式、Douglas差分格式、加权六点隐式格式、交替方向隐式格式等,重点介绍了古典显式格式和交替方向隐式格式。
进行了格式的推导,分析了格式的收敛性、稳定性。
并以热传导方程为数值算例,运用差分方法求解。
通过数值算例,得出古典显式格式计算起来较简单,但稳定性条件较苛刻;而交替方向隐式格式无条件稳定。
关键词:二维抛物方程;有限差分法;古典显式格式;交替方向隐式格式FINITE DIFFERENCE METHOD FORTWO-DIMENSIONAL PARABOLICEQUATIONAbstractTwo-dimensional parabolic equation is a widely used class of partial differential equations. Because this kind of equation is so complex, we consider numerical methods instead of obtaining analytical solutions. finite difference method is the most simple and extremely important numerical methods for differential equations. The paper introduces the finite difference method fortwo-dimensional parabolic equation.Firstly, this paper introduces the background and common numerical methods for Parabolic Equation, Background and development of applications. Discusses the basement for the establishment of the finite difference method for parabolic equation And describes the convergence and stability for finite difference method.Secondly, Introduces some of the more common simple differential format,for example, the classical explicit scheme, the classical implicit scheme, Crank-Nicolson implicit scheme, Douglas difference scheme, weighted six implicit scheme and the alternating direction implicit format. The paper focuses on the classical explicit scheme and the alternating direction implicit format. The paper takes discusses the derivation convergence,and stability of the format . The paper takes And the heat conduction equation for the numerical example, using the differential method to solve. Through numerical examples, the classical explicit scheme is relatively simple for calculation, with more stringent stability conditions; and alternating direction implicit scheme is unconditionally stable.Keywords:Two-dimensional Parabolic Equation; Finite-Difference Method; Eclassical Explicit Scheme; Alternating Direction Implicit Scheme目录摘要........................................................................................................................... .. (I)Abstract .............................................................................................................. ............................ II 1绪论. (1)1.1课题背景 (1)1.2发展概况 (1)1.2.1抛物型方程的常见数值解法 (1) 1.2.2有限差分方法的发展 (2)1.3差分格式建立的基础 (3)1.3.1区域剖分 (3)1.3.2差商代替微商 (3)1.3.3差商代替微商格式的误差分析 (4) 1.4本文主要研究容 (5)2显式差分格式 (7)2.1常系数热传导方程的古典显式格式 (7) 2.1.1古典显式格式格式的推导 (7)2.1.3古典显式格式的算法步骤 (8)3隐式差分格式 (10)3.1古典隐式格式 (10)3.2 Crank-Nicolson隐式格式 (12)3.3 Douglas差分格式 (13)3.4加权六点隐式格式 (14)3.5交替方向隐式格式 (15)3.5.1 Peaceman-Rachford格式 (15) 3.5.2 Rachford-Mitchell格式 (15)3.5.3 Mitchell-Fairweather格式 (15) 3.5.4交替方向隐式格式的算法步骤 (16) 4实例分析与结果分析 (17)4.1算例 (17)4.1.1已知有精确解的热传导问题 (17) 4.1.2未知精确解的热传导问题 (19)4.2结果分析 (20)5稳定性探究与分析 (21)5.1稳定性问题的提出 (21)5.2 几种分析稳定性的方法 (21)5.3 r变化对稳定性的探究 (23)5.3.1 古典显式格式的稳定性 (23)5.3.2 P-R格式格式的稳定性 (24)结语 (26)参考文献 (27)附录P-R格式的C++实现代码 (28)致谢 (30)1绪论1.1课题背景抛物方程是一类特殊的偏微分方程,二维抛物方程的一般形式为u Lu t=? (1-1) 其中1212((,,))((,,))(,,)(,,)(,,)u u u u u u L a x y t a x y t b x y t b x y t C x y t x x y y x y=++++ 120,0,0a a C >>≥。
二维波动方程的解法
二维波动方程的解法二维波动方程是一种常见的偏微分方程形式,它描述了二维空间中的波动现象,如水波、电磁波等。
解决二维波动方程,对于理解复杂物理问题有很大帮助。
本文将介绍二维波动方程的解法,包括分离变量法、变换方法等。
二维波动方程是指一个偏微分方程,如下所示:$$\frac{\partial^2 u}{\partial x^2}+\frac{\partial^2 u}{\partialy^2}=\frac{1}{v^2}\frac{\partial^2 u}{\partial t^2}$$其中,$u$是波函数,$v$是波速,$t$是时间,$x$和$y$是二维空间的坐标。
我们假设边界条件为$u(x,0)=f(x)$和$u(x,y)|_{\partial D}=0$。
其中,$f(x)$是已知函数,$\partial D$是区域D的边界。
接下来,我们将介绍几种解决二维波动方程的方法。
分离变量法在这种方法中,我们假设解的形式为$u(x,y,t)=X(x)Y(y)T(t)$。
将$X(x)$,$Y(y)$和$T(t)$代入原方程,可以得到:$$\frac{X''(x)}{X(x)}+\frac{Y''(y)}{Y(y)}=\frac{1}{v^2}\frac{T''( t)}{T(t)}$$由于每个因子只与对应的变量相关,所以我们可以令每个因子等于一个常数,即$$\frac{X''(x)}{X(x)}=-k^2_x$$$$\frac{Y''(y)}{Y(y)}=-k^2_y$$$$\frac{T''(t)}{T(t)}=-v^2k^2$$这样,我们就得到了三个常微分方程,它们的解分别为:$$X(x)=A_x\sin(k_xx)+B_x\cos(k_xx)$$$$Y(y)=A_y\sin(k_yy)+B _y\cos(k_yy)$$$$T(t)=C\sin(vkx)$$其中,$A_x$,$B_x$,$A_y$,$B_y$和$C$是常数,$k_x$,$k_y$和$k$是相应常数。
二维Laplace方程Dirichlet问题的数值解法
2 8
高 师 理 科 学 刊
第3 O卷
若 其连续 密度 函数 (是 积分方 程 )
( 一 ( nt d ): 2(( r 2 ) c y) , 一f ) ) ) F , f ) ( ) ∈ ’
() 2
的 则双 位势 解, 层 是内Dil 问 解, ( )=2)i 一 l是L le 程的 解. i ht 题的 其中: , (t n y r e c ,) r aa 方 基本 一 pc
对 2 积 方 : 2 , : 分 子( )) 2 ( I )山) ∈ , 于 第 类 分 程 一 一 其中 积 算 ( : ) U y ( , r 由 f :÷ ' I f) )
NI ) f 并且具有连续或者弱奇异核的积分算子是紧算子 … 据 R s F do (— :0 ) , iz r hl e — e m定理, 2 第 类积分方
调和方程是最典型也是最简单的椭圆型偏微分方程 ,又称 Lpae方程.它可以用来描述流体、电磁 al c 及渗透流 、轴扭 曲等问题.目前在一些具有复杂边界形状的区域中求 出方程的解析解是非常困难的 .因 ~
此寻求有效简单的数值解法对于求解该方程具有非常重要 的实用价值.用边界元 法求解 Lp c 边值问 劈 a le a 题 ,降低了计算维数 ,减少 了前处理数据输入 ,特别适用于外问题 ,比有限元精度高.但标准边界元也带
抛物线方程解法
抛物线方程解法抛物线是一种常见的曲线形式,它在物理学、工程学和数学中都有广泛的应用。
抛物线方程是描述抛物线形状的数学表达式,通常采用二次方程的形式。
在本文中,我们将介绍如何通过抛物线方程来解决相关问题。
抛物线方程的一般形式为 y = ax^2 + bx + c,其中 a、b、c 是常数,x 和 y 分别表示坐标轴上的点的横坐标和纵坐标。
我们可以通过已知的条件,如焦点、顶点和对称轴等,来确定抛物线方程的具体形式。
让我们来看一个简单的例子,以帮助理解抛物线方程的解法。
假设我们已知一个抛物线的焦点为 (1,2),并且过顶点 (0,0)。
我们的目标是找到抛物线的方程。
根据抛物线的定义,我们知道焦点到顶点的距离等于焦点到抛物线上任意一点的距离。
因此,我们可以使用焦点和顶点的信息来确定常数 a 的值。
在这个例子中,焦点到顶点的距离是 2,因此 a = 1/2a。
由此得到抛物线方程的一部分: y = 1/2ax^2 + bx + c。
接下来,我们可以使用顶点的信息来确定常数 b 和 c 的值。
由于顶点 (0,0) 在抛物线上,我们可以将其代入抛物线方程中,得到 c = 0。
此时,抛物线方程变为 y = 1/2ax^2 + bx。
现在,我们还需要确定常数 b 的值。
由于我们已知焦点 (1,2) 在抛物线上,我们可以将其代入抛物线方程中,得到 2 = 1/2a + b。
根据这个方程,我们可以求解出常数 b 的值。
通过以上步骤,我们成功地找到了抛物线方程的解法。
最终的抛物线方程为 y = 1/2x^2 + 3/2x。
除了上述例子中的解法,我们还可以通过其他已知条件来确定抛物线方程。
例如,如果我们已知抛物线的对称轴是 x = 1,我们可以利用这个信息来推导出抛物线方程。
对称轴是抛物线的镜像轴,因此对称轴上的点到焦点的距离等于对称轴上的点到抛物线上任意一点的距离。
通过将对称轴上的点 (1,y) 代入抛物线方程,并根据已知条件求解常数 a 和 c 的值,可以得到抛物线方程。
抛物线中2p的算法及应用
抛物线中2p的算法及应用抛物线是一个非常重要的数学概念,它在日常生活和科学研究中都有广泛的应用。
在数学中,抛物线由二次方程表示,一般的标准公式为y=ax^2+bx+c,其中a、b、c分别是抛物线的参数。
在抛物线中,2p是与焦点有关的一个关键量。
根据抛物线的定义,焦点是距离直线与抛物线对称的一点,同时这个焦点对于抛物线的性质和图像有着重要的影响。
首先,我们来介绍一下如何求解抛物线中2p的具体算法。
对于一般的标准公式y=ax^2+bx+c来说,2p的值可以通过以下步骤求解:步骤1:首先,将二次项系数a化简为1,即将原方程变形为y=x^2+bx+c。
步骤2:然后,根据抛物线的定义,焦点的横坐标可以通过-b/2a求得,即x=-b/2a。
步骤3:接着,将x的值代入原方程中,即可求得焦点的纵坐标,即y=(-b^2+4ac)/4a。
步骤4:最后,通过焦点的横纵坐标可以求得焦距2p的值,即2p=4a。
上述算法是求解抛物线中2p的一种常见方法,它简单而直接,可以在计算机编程和数值计算中得到广泛应用。
接下来,我们来讨论一下抛物线中2p的应用。
抛物线是非常常见的一种曲线,它的性质和特点使得它在许多领域都有着重要的应用。
首先,在物理学中,抛物线是描述自由落体运动的重要曲线。
当物体在重力作用下自由下落时,其运动轨迹符合抛物线。
通过研究抛物线的性质和参数,可以推导出自由落体运动的各种规律和公式,进而研究物体的速度、加速度、位移等物理量。
其次,在工程学中,抛物线也有着广泛的应用。
例如,在建筑设计和道路规划中,抛物线的美学和功能性都被广泛考虑。
通过合理地设计抛物线的参数,可以使得建筑物或道路的结构更加稳定和美观。
此外,在电子技术中,抛物线也被广泛应用于天线设计。
通过研究抛物线天线的性质和参数,可以实现天线的聚焦和增益效果,提高信号的接收和发送能力。
另外,在经济学中,抛物线也被用于描绘一些经济现象的变化趋势。
通过研究抛物线的参数和变化规律,可以预测和分析一些经济指标的发展趋势,对经济决策和政策制定有着重要的参考作用。
ADI(交替隐式求求解抛物型偏微分方程)程序.

%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_t = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % Exact solution: u(t,x,y) = exp(-t) sin(pi*x)sin(pi*y) % % Source term: f(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) (2pi^2-1) % % % % Files needed for the test: % % % % adi.m: This file, the main calling code. % % f.m: The file defines the f(t,x,y) % % uexact.m: The exactsolution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 40; tfinal = 1; m = n; h = (b-a)/n; dt=h; h1 = h*h; r=dt/h1; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = uexact(t,x(i),y(j)); end end %---------- Big loop for time t -------------------------------------- k_t = fix(tfinal/dt); for k=1:k_t t1 = t + dt; t2 = t + dt/2; %--- sweep in x-direction -------------------------------------- for i=2:m, % Boundary condition. u2(1,i) = -r/2*uexact(t1,x(1),y(i-1)) + (1+r)*uexact(t1,x(1),y(i)) + -r/2*uexact(t1,x(1),y(i+1));u2(m+1,i) = -r/2*uexact(t1,x(m+1),y(i-1)) + (1+r)*uexact(t1,x(m+1),y(i)) + -r/2*uexact(t1,x(m+1),y(i+1)); end for j = 2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = r^2/4*( u1(i-1,j-1) + u1(i-1,j+1) + u1(i+1,j-1) + u1(i+1,j+1) ) ... +r/2*( 1-r )*( u1(i-1,j) + u1(i+1,j) + u1(i,j-1) + u1(i,j+1) )... + ( 1-2*r+r^2 )*u1(i,j) -3/2*dt*exp( 1/2*( (i-1)*h + (j-1)*h ) -t2 ); end b(1) = b(1) + r/2 * u2(1,j); b(m-1) =b(m-1) + r/2 * u2(m+1,j); A = diag( (1+r)*ones(m-1,1) ) + diag( -r/2*ones(m-2,1),1 ) ... + diag(-r/2*ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1,u2(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i=1:m+1, % Boundary condition u1(i,1) = uexact(t1,x(i),y(1));u1(i,n+1) = uexact(t1,x(i),y(m+1)); u1(1,i) = uexact(t1,x(1),y(i)); u1(m+1,i) =uexact(t1,x(m+1),y(i)); end for i = 2:m, for j=2:m, b(j-1) = u2(i,j); end b(1) = b(1) + r/2*u1(i,1); b(m-1) = b(m-1) + r/2*u1(i,m+1);A = diag( (1+r)*ones(m-1,1) ) + diag( -r/2*ones(m-2,1),1 ) ... + diag(-r/2*ones(m-2,1),-1); ut = A\b; for j=1:n-1, u1(i,j+1) = ut(j); end end % Finish y-sweep. t = t + dt; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end [xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u1) title('数值解图') pause surf(xx,yy,ue) title('精确解图') pausesurf(xx,yy,u1-ue) title('误差图') e = max(max(abs(u1-ue))) % The infinityerror. %******%表示原来程序编写错误 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_tt = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % 精确解: u(t,x,y) = exp( 1/2*(x+y) - t ) % % 右端函数: f(t,x,y) = 1/2*exp( 1/2*(x+y) - t ) % % 初始条件: g1 = exp( 1/2*(x+y) ) % % 初始导数条件: g2 = -exp( 1/2*(x+y) ) % % 需要函数 % % g1.m g2.m 初始条件 % % f2.m: The file defines the f(t,x,y) % % uexact.m: The exactsolution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 10; tfinal = 1; m = n; h = (b-a)/n; dt=h; s=(dt/h)^2; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = g1(x(i),y(j)); end end %-- Initial deriavtive condition: for i=1:m+1, for j=1:m+1, %******% u2(i,j) = g1(x(i),y(j)) + dt * g2( x(i),y(j) ) + dt^2/4 * ( g1(x(i),y(j)) + f2 (t, x(i),y(j) ) ); u2(i,j) =g1(x(i),y(j)) + dt * g2( x(i),y(j) ) + dt^2/2 * ( g1(x(i),y(j))/2 + f2 (t, x(i),y(j) ) ); endend %---------- Big loop for time t -------------------------------------- k_t = fix(tfinal/dt); for k=2:k_t t1 = t + dt; t2 = t1 + dt; %--- sweep in x-direction --------------------------------------for i=1:m+1, % Boundary condition. u4(1,i) = ( uexact(t,x(1),y(i)) -2*uexact(t1,x(1),y(i)) + uexact(t2,x(1),y(i)) )/dt^2 ; u4(m+1,i) = ( uexact(t,x(m+1),y(i)) - 2*uexact(t1,x(m+1),y(i)) + uexact(t2,x(m+1),y(i)) )/dt^2 ; u4(i,1) = ( uexact(t,x(i),y(1)) - 2*uexact(t1,x(i),y(1)) + uexact(t2,x(i),y(1)) )/dt^2 ; u4(i,m+1) = ( uexact(t,x(i),y(m+1)) - 2*uexact(t1,x(i),y(m+1)) + uexact(t2,x(i),y(m+1)) )/dt^2 ; end for i=2:m u3(1,i)=-s/2*u4(1,i-1) + (1+s)*u4(1,i) - s/2*u4(1,i+1); u3(m+1,i)=-s/2*u4(m+1,i-1) +(1+s)*u4(m+1,i) - s/2*u4(m+1,i+1); end for j = 2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = ( u2(i-1,j) + u2(i+1,j) + u2(i,j-1) + u2(i,j+1) -4*u2(i,j) )/h^2 +f2 (t1, x(i),y(j) ); end b(1) = b(1) + s/2 * u3(1,j); b(m-1) = b(m-1) + s/2 * u3(m+1,j); A = diag( (1+s)*ones(m-1,1) ) + diag( -s/2*ones(m-2,1),1 ) ... + diag(-s/2*ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1, u3(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i = 2:m, forj=2:m, b(j-1) = u3(i,j); end b(1) = b(1) + s/2*u4(i,1); b(m-1) = b(m-1) + s/2*u4(i,m+1); ut = A\b; for j=1:n-1, u4(i,j+1) = ut(j); end end % Finish y-sweep. for i=1:m+1, % Boundary condition u5(i,1) = uexact(t2,x(i),y(1)); u5(i,m+1) = uexact(t2,x(i),y(m+1));u5(1,i) = uexact(t2,x(1),y(i)); u5(m+1,i) = uexact(t2,x(m+1),y(i)); end for i=2:m, forj=2:m, u5(i,j) = dt^2 * u4(i,j) + 2*u2(i,j) - u1(i,j); end end u1=u2; u2=u5; %******%t = t2 + dt; t = t+dt ; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end[xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u2) title('数值解图') pausesurf(xx,yy,ue) title('精确解图') pause %******%surf(xx,yy,u2-ue) surf(xx,yy,u2-ue) title('误差图') e = max(max(abs(u2-ue))) %******%e = max(max(abs(u1-ue))) % The infinityerror. %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Example of ADI Method for 2D heat equation % % % % u_t = u_{xx} + u_{yy} + f(x,t) % %a<x<b;c<y<d % % Test problme: % % Exact solution: u(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) % % Source term: f(t,x,y) = exp(-t) sin(pi*x) sin(pi*y) (2pi^2-1) % % % % Files needed for the test: % % % % f.m: The file defines the f(t,x,y) % % uexact.m: The exact solution. % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear; close all; a = 0; b=1; c=0; d=1; n = 20; tfinal = 1; m = n; h = (b-a)/n; h1 = h*h; dt=h1; r=dt/h1; x=a:h:b; y=c:h:d; %-- Initial condition: t = 0; for i=1:m+1, for j=1:m+1, u1(i,j) = uexact(t,x(i),y(j)); end end %---------- Big loop for time t -------------------------------------- k_t = ceil(tfinal/dt); for k=1:k_t t1 = t + dt; t2 = t + dt/2; %--- sweep in x-direction -------------------------------------- for j=2:m, % Boundary condition. u2(1,j) = (1/12-r/2)*uexact(t1,x(1),y(j-1)) + (5/6+r)*uexact(t1,x(1),y(j)) + (1/12-r/2) *uexact(t1,x(1),y(j+1)); u2(m+1,j) = (1/12-r/2)*uexact(t1,x(m+1),y(j-1)) +(5/6+r)*uexact(t1,x(m+1),y(j)) + (1/12-r/2) * uexact(t1,x(m+1),y(j+1)); end for j =2:n, % Look for fixed y(j) b=zeros(m-1,1); for i=2:m, b(i-1) = (1/144+r/12+r^2/4) * ( u1(i-1,j-1) + u1(i-1,j+1) + u1(i+1,j-1) + u1(i+1,j+1) ) ... + ( 10/144+r/3-r^2/2 )*( u1(i-1,j) + u1(i+1,j) + u1(i,j-1) + u1(i,j+1) )... + ( 100/144 - 40 * r/24 + r^2 )*u1(i,j)... + dt * ( f(t2,x(i-1),y(j-1)) + f(t2,x(i-1),y(j+1)) + f(t2,x(i+1),y(j-1)) + f(t2,x(i+1),y(j+1))... + 10 * ( f(t2,x(i-1),y(j)) + f(t2,x(i+1),y(j)) + f(t2,x(i),y(j-1)) + f(t2,x(i),y(j+1)) )... + 100 *f(t2,x(i),y(j)) ) / 144; end b(1) = b(1) + ( r/2 -1/12 ) * u2(1,j); b(m-1) = b(m-1) + ( r/2 -1/12 ) * u2(m+1,j); A = diag( (5/6+r)*ones(m-1,1) ) + diag( (1/12-r/2) * ones(m-2,1),1 ) ... + diag( (1/12-r/2) * ones(m-2,1),-1); ut = A\b; % Solve the diagonal matrix. for i=1:m-1, u2(i+1,j) = ut(i); end end % Finish x-sweep. %-------------- loop in y -direction -------------------------------- for i=1:m+1, % Boundary condition u1(i,1) = uexact(t1,x(i),y(1)); u1(i,n+1) = uexact(t1,x(i),y(m+1)); u1(1,i) = uexact(t1,x(1),y(i));u1(m+1,i) = uexact(t1,x(m+1),y(i)); end for i = 2:m, for j=2:m, b(j-1) = u2(i,j); end b(1) =b(1) + ( r/2 -1/12 ) * u1(i,1); b(m-1) = b(m-1) + ( r/2 -1/12 ) * u1(i,m+1); ut = A\b; for j=1:n-1, u1(i,j+1) = ut(j); end end % Finish y-sweep. t = t + dt; %--- finish ADI method at this time level, go to the next time level. end %-- Finished with the loop in time %----------- Data analysis ---------------------------------- for i=1:m+1, for j=1:n+1, ue(i,j) = uexact(tfinal,x(i),y(j)); end end [xx,yy]=meshgrid(x,y); xx=xx';yy=yy'; mesh(xx,yy,u1) title('数值解图') pause surf(xx,yy,ue) title('精确解图') pause surf(xx,yy,u1-ue) title('误差图') e = max(max(abs(u1-ue))) % The infinity error. %算例1.1.3,见课本第17页 %首先网格剖分 xl=0.; xr=pi;%左右端点 n=20; h=(xr-xl)/n;%步长 %解差分格式形成的方程组 U=zeros(n-1,1); aa=-1+h^2/12; bb=2+5/6*h^2; A=diag(bb*ones(n-1,1))+diag(aa*ones(n-2,1),1)+diag(aa*ones(n-2,1),-1);%系数矩阵 F=zeros(n-1,1); for i=1:n-1 F(i)=h^2/12*(exp(xl+(i-1)*h)*(sin(xl+(i-1)*h)-2*cos(xl+(i-1)*h))+10*exp(xl+i*h)*(sin(xl+i*h)-2*cos(xl+i*h))+exp(xl+(i+1)*h)*(sin(xl+(i+1)*h)-2*cos(xl+(i+1)*h)));%右端项 end U=inv(A)*F;%得到数值解 %精确解与数值解误差绝对值的最大值 ana=zeros(n-1,1); for i=1:n-1 ana(i)=exp(xl+i*h)*sin(xl+i*h);%精确解 end wucha=max(abs(U-ana)) %可视化处理 x=xl:h:xr; U=[0 U' 0];%U表示数值解ana=[0 ana' 0];%ana表示精确解 plot(x,U,'r*',x,ana); %向后Euler差分格式 %Ut-Uxx=0,0<x<1,0<t<1 %u(x,0)=exp(x) %u(0,t)=exp(t),u(1,t)=exp(1+t) %%%%%%%网格剖分%%%%%%%%% % first set up the attributes h = 0.1; % the step-size in the x dimension%空间步长 r=1; %步长比 dt = h^2 * r; % the step-size in the t dimension%%时间步长 T0 = 1; % the time-interval over which we will calculate u 时间长度 TN = ceil(T0 / dt); % the number of steps in the time-interval%时间网格 X0 = 1; % the x-interval over which we will calculate u空间长度 XN = ceil(X0 / h); % the number of steps in the x-interval%空间网格 U = zeros(XN + 1, TN + 1); % set up an array of zeros %初始化 % Next we set up the initial conditions%初始值及边界值 x = 0 :h: X0; for j=1:XN+1 U(j , 1) = exp( (j-1)*h ); end for k=1:TN+1 U(1,k) =exp( (k-1) *dt);U(XN+1,k)=exp(1+ ( k-1 ) *dt); end %%%%%%形成系数矩阵%%%%%%%% A=diag((5/6+r)*ones(XN-1,1))+diag( (1/12-r/2) *ones(XN-2,1),1 )+diag( (1/12-r/2)*ones(XN-2,1),-1 ); B=diag((5/6-r)*ones(XN-1,1))+diag( (1/12+r/2) *ones(XN-2,1),1 )+diag( (1/12+r/2)*ones(XN-2,1),-1 ); %右端项初始化 F = zeros( XN-1,1 ); %迭代求解 for k = 1 : TN F(1)=(1/12+r/2)*exp((k-1)*dt)-(1/12-r/2)*exp(k*dt); F(XN-1)=(1/12+r/2)*exp((k-1)*dt+1)-(1/12-r/2)*exp(k*dt+1); U(2:XN,k+1)= A \ ( B * U(2:XN,k) + F ); end; %给出精确解 ana = zeros(XN + 1, TN + 1); for k = 1 : TN+1 for j = 1 : XN+1 ana(j, k ) = exp ( (j-1) *h + (k-1)*dt); end; end; %给出在T=1时的最大误差 max( abs ( U (:,TN+1) -ana (:,TN+1) ) ) %图示化 t=0:dt:T0; [xx,tt]= meshgrid(x,t); xx=xx'; tt=tt'; mesh(xx,tt,ana); title('analytical solution');ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(xx,tt,U); title('numerical solution'); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(xi,tk)'); pause mesh(xx,tt,U-ana); title('diffeence beween analical and numeical soluion'); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); xlabel(sprintf('steps in time-domain\nfrom 0 to 1')); zlabel('U(xi,tk)'); pauseplot(x,U(:,TN+1),'-or',x,ana(:,TN+1)) title('向前Euler格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)')%Crank-Nicolson schemes % 显差分格式 %算例4.1.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/20; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n-1,m-1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% for k=2:n for i=2:m u (k+1 , i) = s^2 * u (k , i-1) +2*( 1-s^2 )*u (k , i) ... + s^2 * u (k , i+1) - u (k-1 , i) + dt^2 * f( k , i); endend %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end;end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % compace 差分格式 %算例4.3.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/100; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 fori=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (5/6+s^2 )*ones( m-1,1 ) )+diag( (1/12-1/2*s^2) * ones (m-2,1),1 )+diag( (1/12-1/2*s^2) * ones (m-2,1),-1 ); B=diag( -(5/6+s^2 )*ones( m-1,1 ) )+diag( (1/2*s^2-1/12) * ones (m-2,1),1 )+diag( (1/2*s^2-1/12) * ones (m-2,1),-1 ); C=diag(5/3*ones(m-1,1))+diag(1/6*ones(m-2,1),1)+diag(1/6*ones(m-2,1),-1); for k=2:n for i=2:m F(i-1)=1/12*dt^2*( f(i-1)+10*f(i)+f(i+1) ); end F(1)=F(1) + (1/2*s^2-1/12) * ( u(k+1,1) + u(k-1,1) )+1/6*u(k,1); F(m-1)=F(m-1) + (1/2*s^2-1/12) * ( u(k+1,m+1) + u(k-1,m+1) )+1/6*u(k,m+1); y = A \ ( B * u(k-1,2:m )' + F' + C* u( k,2:m )' ); for i=1:m-1u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % implicit difference scheme %算例4.2.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt = 1/10; %时间步长 s = a *dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (1+s^2 )*ones( m-1,1 ) )+diag( -1/2*s^2 * ones (m-2,1),1 )+diag( -1/2*s^2 * ones (m-2,1),-1 ); B=diag( -(1+s^2 )*ones( m-1,1 ) )+diag( 1/2*s^2 * ones (m-2,1),1 )+diag( 1/2*s^2 * ones (m-2,1),-1 ); for k=2:n F = dt^2 * f( k,2:m ); F(1)=F(1) + 1/2*s^2*( u(k+1,1) + u(k-1,1) ); F(m-1)=F(m-1) +1/2*s^2*( u(k+1,m+1) + u(k-1,m+1) ); y = A \ ( B * u(k-1,2:m )' + F' + 2 * u( k,2:m )' ); for i=1:m-1 u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana= zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt';mesh(tt,xx,ana); title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1')); ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pausemesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1')); ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pausemesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion');xlabel(sprintf('steps in time- domain\nfrom 0 to 1')); ylabel(sprintf('steps in xdomain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') % compace 差分格式 %算例4.3.1 %%%%%%%网格剖分%%%%%%%%% h = 1/10; %%空间步长 a = 1; dt =1/100; %时间步长 s = a * dt/h; %步长比 T = 1; % 时间长度 n = ceil(T / dt); % 时间网格 X0 = 1; % 空间长度 m = ceil(X0 / h); %空间网格 u = zeros(n + 1, m + 1); %%数解初始化u(tk,xi) % %初始值及边界值 x=0:h:X0; phi=exp(x); u(1,:)=phi; %u的第一行表示初始状态 t=0:dt:T; u(:,1)=exp(t'); %左界u(:,m+1)=exp(1+t'); %%%%%%%%%%%%%%% f=zeros(n+1,m+1); for k=1:n+1 for i=1:m+1 f(k,i)=0; end end %%%%%%%%%%%%%%% psi=exp(x); for i = 2:m u(2,i) = dt * psi(i) + s^2/2 * ( phi(i-1) + phi(i+1) ) ... + ( 1 - s^2 ) * phi(i) + dt^2/2 * f(1,i);end %%%%%%%%%%%%%%% A=diag( (5/6+s^2 )*ones( m-1,1 ) )+diag( (1/12-1/2*s^2) * ones (m-2,1),1 )+diag( (1/12-1/2*s^2) * ones (m-2,1),-1 ); B=diag( -(5/6+s^2 )*ones( m-1,1 ) )+diag( (1/2*s^2-1/12) * ones (m-2,1),1 )+diag( (1/2*s^2-1/12) * ones (m-2,1),-1 ); C=diag(5/3*ones(m-1,1))+diag(1/6*ones(m-2,1),1)+diag(1/6*ones(m-2,1),-1); for k=2:n for i=2:m F(i-1)=1/12*dt^2*( f(i-1)+10*f(i)+f(i+1) ); end F(1)=F(1) + (1/2*s^2-1/12) * ( u(k+1,1) + u(k-1,1) )+1/6*u(k,1); F(m-1)=F(m-1) + (1/2*s^2-1/12) * ( u(k+1,m+1) + u(k-1,m+1) )+1/6*u(k,m+1); y = A \ ( B * u(k-1,2:m )' + F' + C* u( k,2:m )' ); for i=1:m-1u(k+1,i+1)=y(i); end end %%%%%%%%%%%%%%%%给出精确解 ana = zeros(n + 1, m + 1); for k = 1 : n+1 for i = 1 : m+1 ana( k, i ) = exp ( (i-1) *h + (k-1)*dt); end; end; %%%%%%%%%%%%%%%给出在T=1时的最大误差 max( abs ( u (n+1,:) -ana (n+1,:) ) ) %图示化 [tt,xx]= meshgrid(t,x); xx=xx'; tt=tt'; mesh(tt,xx,ana);title('analytical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('U(x,y)'); pause mesh(tt,xx,u); title('numerical solution'); xlabel(sprintf('steps in time domain\nfrom 0 to 1'));ylabel(sprintf('steps in x-domain\nfrom 0 to 1')); zlabel('u(xi,tk)'); pause mesh(tt,xx,u-ana); title('diffeence beween analical and numeical soluion'); xlabel(sprintf('steps intime- domain\nfrom 0 to 1')); ylabel(sprintf('steps in x domain\nfrom 0 to 1')); zlabel('u-ana'); pause plot(x,u(n+1,:),'-or',x,ana(n+1,:)) title('显格式数值解与精确解的比较') legend('uh(x,1)','u(x,1)') function pdegui(action) %PDEGUI Demonstrate soluton of model partial differential equations. % PDEGUI demonstrates the finite difference solution of model problems % involving Laplace's operator: % del^2_U =partial^2_U/partial_x^2 + partial^2_U/partial_y^2. % The PDEs are: % Poisson equation, del^2_U = 1. % Eigenvalue equation, del^2_U + lambda U = 0. % Heat equation, partial_U/dt = del^2_U. % Wave equation, partial^2_U/partial_t^2 =del^2_U. % Various regions can be selected: % Square, -1 = x = 1, -1 = y = 1. % L-shaped MathWorks logo made from 3/4 of the square. % Curved 'L', with a quarter circle in the 4-th square. % Disc of radius one. % Annulus with outer radius = 1, inner radius = 1/3; % Heart-shaped cardioid. % Exterior of a "Butterfly". % Cross section of a double ridge microwave waveguide. % For the eigenvalue problem, you can set the eigenvalue index. % For the heat equation, you can set sigma = (delta_t)/(delta_x)^2. % For the wave equation, you can set sigma = ((delta_t)/(delta_x))^2. % If sigma is too large, the time-stepping methods are unstable. if nargin == 0 Initialize_GUI action ='restart'; end set(findobj('tag','stop'),'userdata',0) drawnow if isequal(action,'restart') % Retrieve parameters from GUI r = findobj('tag','region'); s = get(r,'string'); region = s{get(r,'value')}; eqn = get(findobj('tag','eqn'),'value'); n =eval(get(findobj('tag','edit1'),'string')); text2 = findobj('tag','text2'); edit2 =findobj('tag','edit2'); if eqn == 1 set(text2,'vis','off'); set(edit2,'vis','off');set(findobj('string','+'),'vis','off'); set(findobj('string','-'),'vis','off'); else set(text2,'vis','on'); set(edit2,'vis','on'); set(findobj('string','+'),'vis','on'); set(findobj('string','-'),'vis','on'); end sigma = []; indx = []; switch eqn case 1 case 2 set(text2,'string','index =')set(edit2,'string','1') indx = 1; case 3 set(text2,'string','sigma =') set(edit2,'string','0.250') sigma = .250; case 4 set(text2,'string','sigma =') set(edit2,'string','0.500') sigma = .500; end % Generate the grid. G = gengrid(region(1),n); % Generate the discrete Laplacian.A = Laplacian(G); m = size(A,1); % Initialize the solution [x,y] = meshgrid(-1:2/n:1); if eqn == 1; u = []; v = []; lambda = []; elseif eqn == 2 v = []; h = 2/n; [u,lambda] = eigswatch(-(1/h^2)*A,10); else k = (G > 0); u = zeros(m,1); v = zeros(m,1); r =sqrt((x(k)-.5).^2 + (y(k)+.5).^2); if eqn == 3 u(:) = -(15/n)*exp(-5*r); else v(:) = -(15/n)*exp(-5*r); end lambda = []; end % Save everything in figure's userdata. data.eqn = eqn; data.G = G; data.A = A; data.x = x; data.y = y; data.n = n; data.m = m; data.u = u; data.v = v; data.sigma = sigma; data.indx = indx; mbda = lambda;set(gcf,'userdata',data); else % New value of sigma or index. data = get(gcf,'userdata'); edit2 = findobj('tag','edit2'); if data.eqn == 2 data.indx = eval(get(edit2,'string')); ifisequal(action,'+') data.indx = data.indx + 1; elseif isequal(action,'-') data.indx =max(1,data.indx - 1); end set(edit2,'string',sprintf('%6.0f',data.indx)) else data.sigma = eval(get(edit2,'string')); if isequal(action,'+') data.sigma = data.sigma + .001; elseif isequal(action,'-') data.sigma = data.sigma - .001; endset(edit2,'string',sprintf('%6.3f',data.sigma)) end set(gcf,'userdata',data); end data =get(gcf,'userdata'); A = data.A; u = data.u; v = data.v; sigma = data.sigma; eqn = data.eqn; m = data.m; n = data.n; indx = data.indx; x = data.x; y = data.y; G = data.G; set(findobj('tag','stop'),'userdata',0); while get(findobj('tag','stop'),'userdata') == 0 switch eqn case 1 % Solve sparse linear system Au = 1 u = A\(ones(m,1)); u = u/max(max(abs(u))); set(findobj('tag','stop'),'userdata',1) case 2 % Some eigenvalues already computed; maybe need more. while indx >length(mbda) k = length(mbda)+10; h = 2/n; [u,lambda] = eigswatch(-(1/h^2)*A,k); mbda = lambda; data.u = u; end lambda = mbda(indx); u = data.u(:,indx); u = u/max(max(abs(u))); set(findobj('tag','stop'),'userdata',1) case 3 % One step for heat equation u = u + sigma*A*u; data.u = u; case 4 % One step for wave equation w = u; u = 2*u - v + sigma*A*u; v = w; data.u = u; data.v = v; end % Map the solution onto the grid and display it. z = G; k = find(G>0); z(k) = u(z(k));contour(x,y,z,-1:.05:1) axis square set(gca,'color','k') if eqn == 2title(sprintf('lambda(%2d) = %9.4f',indx,lambda)) end drawnow set(gcf,'userdata',data) end % ------------------------------------------------------------------------ functionInitialize_GUI clf reset set(gcf,'pos',[150 260 710420],'doublebuffer','on','menubar','none', ... 'numbertitle','off','name','PDEgui','userdata',1); set(gca,'pos',[.11 .11 .6 .815]) uicontrol( ... 'tag','region', ...'style','list', ... 'units','normal', ... 'position',[.75 .55 .20 .35], ... 'string',{'Square','L (Logo)','Curved L','Disc','Annulus',... 'Heart','Butterfly','Waveguide'}, ... 'fontsize',12, ... 'value',2, ... 'callback','pdegui(''restart'')') uicontrol( ... 'tag','eqn', ... 'style','list', ...'units','normal', ... 'position',[.75 .35 .20 .18], ...'string',{'Poisson','Eigenvalue','Heat','Wave'}, ... 'fontsize',12, ... 'value',1, ...'callback','pdegui(''restart'')') uicontrol( ... 'tag','text1', ... 'style','text', ... 'units','normal', ... 'position',[.75 .27 .10 .06], ... 'string','grid size =', ... 'fontsize',12) uicontrol( ...'tag','edit1', ... 'style','edit', ... 'units','normal', ... 'position',[.85 .27 .10 .06], ...'string','32', ... 'backgroundcolor',[1 1 1], ... 'fontsize',12, ... 'callback','pdegui(''restart'')') uicontrol( ... 'tag','text2', ... 'style','text', ... 'units','normal', ... 'position',[.75 .19 .10 .06], ... 'string','', ... 'fontsize',12) uicontrol( ... 'tag','edit2', ... 'style','edit', ... 'units','normal', ... ' position',[.85 .19 .08 .06], ... 'string','0.5', ... 'backgroundcolor',[1 1 1], ... 'fontsize',12, ... 'callback','pdegui(''sigint'')') uicontrol( ... 'style','pushbutton', ... 'units','normal', ...'position',[.93 .19 .02 .03], ... 'string','-', ... 'fontsize',12, ... 'callback','pdegui(''-'')') uicontrol( ... 'style','pushbutton', ... 'units','normal', ... 'position',[.93 .22 .02 .03], ...'string','+', ... 'fontsize',12, ... 'callback','pdegui(''+'')') uicontrol( ... 'tag','stop', ...'style','pushbutton', ... 'units','normal', ... 'position',[.80 .11 .12 .06], ... 'string','stop', ... 'fontsize',12, ... 'userdata',0, ... 'callback','set(gcbo,''userdata'',1)'); uicontrol( ...'style','pushbutton', ... 'units','normal', ... 'position',[.80 .03 .12 .06], ... 'string','close', ... 'fontsize',12, ... 'callback','close(gcf)'); % ------------------------------------------------------------------------ function [u,lambda] = eigswatch(A,k) % [u,lambda] = eigswatch(A,k) % Modify pointer and text while computing k smallest % eigenvalues and eigenvectors of sparse matrix A. ps = get(gcf,'pointer'); set(gcf,'pointer','watch') text2 =findobj('tag','text2'); edit2 = findobj('tag','edit2'); str = get(text2,'string');set(text2,'string','computing') set(edit2,'vis','off') drawnow opts.disp = 0; [u,lambda] = eigs(A,k,0,opts); [lambda,p] = sort(diag(lambda)); u = u(:,p); % Make first eigenvector positive to % distinguish it from Poisson solution. u(:,1) = abs(u(:,1));set(text2,'string',str) set(edit2,'vis','on') set(gcf,'pointer',ps) % ------------------------------------------------------------------------ function G = gengrid(R,n) %GENGRID Number the grid points in a two dimensional region. % G = GENGRID('R',n) numbers the points on an n-by-n grid in % the subregion of -1=x=1 and -1=y=1 determined by 'R'. %SPY(GENGRID('R',n)) plots the points. % LAPLACIAN(GENGRID('R',n)) generates the 5-point discrete Laplacian. % The regions currently available are: % 'S' - the entire square. % 'L' - the L-shaped domain made from 3/4 of the entire square. % 'C' - like the 'L', but with a quarter circle in the 4-th square. % 'D' - the unit disc. % 'A' - an annulus. % 'H' - a heart-shaped cardioid. % 'B' - the exterior of a "Butterfly". % 'W' - cross section of a double ridge microwave waveguide. [x,y] = meshgrid(-1:2/n:1); switch(R) case 'S' G = (x > -1) & (x 1) & (y > -1) & (y 1); case 'L' G = (x > -1) & (x 1) & (y > -1) & (y 1) & ( (x > 0) | (y > 0)); case 'C' G = (x > -1) & (x 1) & (y > -1) & (y 1) & ((x+1).^2+(y+1).^2 > 1); case 'D' G = x.^2 + y.^2 1; case 'A' G = ( x.^2 + y.^2 1) & ( x.^2 + y.^2 > 1/3); case 'H' rho = .75; sigma= .75; G = (x.^2+y.^2).*(x.^2+y.^2-sigma*y) rho*x.^2; case 'B' t = atan2(y,x); r =sqrt(x.^2 + y.^2); G = (r >= sin(2*t) + .2*sin(8*t)) & ... (x > -1) & (x 1) & (y > -1) & (y 1); case 'W' G = (x > -1) & (x 1) & (y > -1) & (y 1) & (abs(x)>1/2 | abs(y)<1/2); otherwise error('Invalid region type.'); end k = find(G); G = zeros(size(G)); G(k) = (1:length(k))'; % ------------------------------------------------------------------------ function D = Laplacian(G) %LAPLACIAN Construct five-point finite difference Laplacian. % Laplacian(G) is the sparse form of the two-dimensional, % 5-point discrete Laplacian。
抛物线问题解决中的一些技巧

抛物线问题解决中的一些技巧抛物线是三大圆锥曲线之一,在高考中占有重要的地位。
求解抛物线问题我们应掌握一些解题的技巧,从而使得我们的解题更简洁、思路更清晰。
一、正确选用标准方程例1、求以原点为顶点,坐标轴为对称轴,并且经过点(24)P --,的抛物线的标准方程. 解:由题意,抛物线有两种情形:(1)设抛物线22(0)y px p =>,将(24)P --,代入得4p =.故标准方程为28y x =-; (2)设抛物线22(0)x py p =->,将(24)P --,代入得12p =,故标准方程为2x y =-. 所以满足条件的抛物线的标准方程为28y x =-或2x y =-.点评:求圆锥曲线的标准方程,关键是确定类型,设出方程,待定系数法是常用方法之一。
本题应结合图形,分析出两种情形,避免漏解。
练习1:已知抛物线的顶点在原点,焦点在y 轴上,抛物线上一点(,3)M m -到焦点距离为5,求m 的值。
解:设抛物线方程为22(0)x py p =->,准线方程:2p y =∵点M 到焦点距离与到准线距离相等,∴532p=-+,解得:4p =,∴抛物线方程为28x y =-。
把(,3)M m -代入得:m =±二、合理使用定义例2、已知点(32)P ,在抛物线24y x =的内部,F 是抛物线的焦点,在抛物线上求一点M ,使MP MF +最小,并求此最小值.解:过M 作准线l 的垂线MA ,垂足为A ,则由抛物线的定义有M F M A =.MP MF MP MA +=+∴,显然当P M A ,,三点共线时,MP MF +最小. 此时,M 点的坐标为(12),,最小值为4. 点评:抛物线的定义用法:一是根据定义求轨迹;二是两个相等距离(动点到焦点的距离与动点到准线的距离)的互化.在解题中,应正确合理地使用定义,同时应注意“看到准线想焦点,看到焦点想准线”。
练习2:已知动点M 的坐标满足方程,则动点M 的轨迹是( )A. 椭圆B. 双曲线C. 抛物线D. 以上都不对解:由题意得:,即动点到直线的距离等于它到原点(0,0)的距离。
一类二维抛物型方程的ADI格式
一类二维抛物型方程的ADI格式【摘要】本文针对一类二维抛物型方程,建立了一个在空间和时间方向上均具有二阶精度的ADI格式,并分析其稳定性. 比较以往算法,此格式具有精度较高,无条件稳定等优点,同时,该方法通过求解两个线性代数方程得到原问题的解,避免了非线性迭代运算,提高了计算效率.【关键词】二维抛物型方程;ADI格式;稳定性;截断误差1.引言抛物型偏微分方程在研究热传导过程、一些扩散现象及电磁场传播等许多问题中都有广泛的应用,对这一类方程数值解法的研究一直是科研工作者关注的热点问题之一,其中高精度的有限差分方法更是受到了越来越多的重视. 考虑如下的初边值问题[1]:其中,为常数.在文献[1]中对问题(1)建立了差分格式,格式的截断误差阶为.本文将在文献[1]的基础上进一步研究问题(1)的高效差分格式,建立了一个高精度的交替方向隐式差分格式(即ADI格式),提高了时间方向上的精度,并给出相应的稳定性分析。
2.差分格式的建立为了得到问题(1)的有限差分格式,首先将求解区域进行网格剖分,结点为. 选取正整数L和N,并令为方向上的网格步长,为方向上的网格步长,记假定第层的已知,则由第(Ⅰ)步,通过解一个三对角线性代数方程组求出,再由第(Ⅱ)步,再解一个三对角线性代数方程组即可求出. 所以,只要利用追赶法求解两个三对角线性代数方程组即可,此时计算量与储存量都较小. 另外,在处理边界条件时,为了提高精度,采取中心差分,这样会出现虚拟值,此时,只要再与格式中的方程联立,即可消去虚拟值[2].3. 稳定性分析下面采用von Newmann方法[3]对上述D格式进行稳定性分析. 一般地,低阶项不影响差分格式的稳定性,所以不妨略去项,并对(3)、(5)式消去中间变量得:利用Taylor展开式求误差,可知此处建立的D格式的截断误差阶为.参考文献:[1]管秋琴.一类二维抛物型方程的有限差分格式[J]. 赤峰学院学报(自然科学版). 2010,26(1):7.[2]Richtmyer R D ,Morton KW. Difference methods for initial - value problems (2nd edition)[J ] . John wiley &sons. 1967.[3]戴嘉尊,邱建贤. 微分方程数值解法[M]. 南京:东南大学出版社.2002.;安庆师范学院青年科研基金项目(KJ201020)。
时域有限差分法发展综述
时域有限差分法发展综述潘忠摘要:时域有限差分法(FDTD)是解决复杂电磁问题的有效方法之一,目前FDTD法的许多重要问题得到了很好的解决,已经发展成为一种成熟的数值计算方法。
随着计算机数据处理性能的快速提高和计算机价格的下降,使得FDTD法的应用范围越来越广,而FDTD法本身在应用中又有新的发展.本文介绍并分析了时域有限差分法,对各种条件的应用进行了比较和分析,给出了具有一定参考价值的结论。
关键词:时域有限差分法;研究与发展;比较;分析A Summary of FDTD and Development at Home and AbroadZhong PanAbstract: The finite difference time-domain (FDTD) method is one of the most effective methods to solve electromagnetic problems. Many important questions of FDTD method have been solved well through many scientists’ effort. Now, FDTD method is a mature numerical method. Especially in few years, the range of using FDTD method is becoming wider and wider because of the faster data processing and processing and cheaper price of computer. FDTD method has also been developed during using. FDTD method is introduced and discussed in this paper. The applications of various conditions are compared and analyzed. Finally, some valuable conclusions are drawn.Key words: FDTD; Research and Development; Comparison; Analysis1966年,K.S.Yee首次提出电磁场数值计算的新方法—时域有限差分法(Finite Difference- Time Domain,简称FDTD)。
ADI(交替方向隐格式)求解二维抛物方程(含matlab程序)
ADI 法求解二维抛物方程学校:中国石油大学(华东) 学院:理学院 姓名:张道德 时间:2013.4.271、ADI 法介绍作为模型,考虑二维热传导方程的边值问题:(3.6.1),0,,0(,,0)(,)(0,,)(,,)(,0,)(,,)0t xx yy u u u x y l t u x y x y u y t u l y t u x t u x l t ϕ=+<<>⎧⎪=⎨⎪====⎩取空间步长1hM,时间步长0,作两族平行于坐标轴的网线:,,,0,1,,,j k x x jh y y kh j k M =====将区域0,x y l ≤≤分割成2M 个小矩形。
第一个ADI 算法(交替方向隐格式)是Peaceman 和Rachford (1955)提出的。
方法:由第n 层到第n+1层计算分为两步:(1) 第一步: 12,12n j k xx yy u +从n->n+,求u 对向后差分,u 向前差分,构造出差分格式为:1(3.6.1)11112222,,1,,1,,1,,1221222,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hhhτδδ+++++-+-+-+-+=+uu uuuu u u (+)u u(2) 第二步:12,12n j k xx yy u +从n+->n+1,求u 对向前差分,u 向后差分,构造出差分格式为:2(3.6.1)1111111222,,1,,1,,1,,12212212,,2-22=21()n n n n n n n n j kj kj kj k j kj k j k j k n n x j k y j k hh hτδδ++++++++-+-++-+-+=+uu uuuu u u (+)u u其中1211,1,,1,0,1,2,,()22n j k M n n n τ+=-=+=+上表表示在t=t 取值。
(整理版)破解抛物线问题“五法”

破解抛物线问题“五法〞1、定义法抛物线是一种重要的圆锥曲线,解题中活用它的定义,常常能收到事半功倍之效.例1动点P 到点F(4,0)的距离比它到直线x+5=0的距离小1,求动点P 的轨迹方程. 解析:此问题的条件可转化为“动点P 到定点F(4,0)和它到定直线x=-4的距离相等〞.由抛物线的定义可知, 动点P 的轨迹是以F(4,0)为焦点、定直线x=-4为准线的抛物线. 显然,8,42==p p , 动点P 的轨迹方程是.162x y = 2、取特殊位置动点、动直线、动弦、动角、动轨迹常常是抛物线问题中出现的动态图形,利用这些动态图形的特殊位置往往能帮助我们迅速解决某些选择题或填空题. 例2设坐标原点为O ,抛物线y 2=2x 与过焦点的直线交于A 、B 两点,那么OA 与OB 的数量积为〔 〕 A.43 B.43- C.3 D.-3解析:对动直线AB ,取其垂直于x 轴的特殊位置,即线段AB 为抛物线的通径(如图1). 由于焦点F 的坐标为)0,21(,那么A )1,21(-B )1,21(,于是OA . OB=)1,21(- .)1,21(=.43141-=- 可知,答案B 正确3、巧设方程确定抛物线的方程是一类重要的题型,在许多情况下,假设恪守常规,不但过程繁琐,运算量大,对于有些问题甚至还可能陷入困境.假设能根据题目的特点,采用相应的设法,那么可到达避繁就简的目的.例3 抛物线的顶点为原点,焦点在x 轴上,且被直线1y x =+所截的弦长为解:设抛物线的方程为2y ax =〔0a ≠,那么有21y ax y x ⎧=⎨=+⎩,消去y 得2(2)10x a x +-+=,设弦AB 的端点为11(,)A x y ,22(,)B x y ,那么122x x a +=-,121x x ===解得1,a =-或5a =所以所求抛物线方程为2y x =-或25y x =..4、整体相减法涉及到抛物线上假设干个动点的问题,我们常常由点的坐标满足抛物线的方程而得到假设干个方程,将这假设干个方程实施整体相减,往往能帮助我们顺利解题.例4求抛物线y x 22-=中斜率为2的平行弦的中点的轨迹方程.解析:设斜率为2的平行弦〔动弦〕的两个端点A 、B 的坐标分别为),(),,(2211y x y x ,中点M 的坐标为),(y x . 那么2221212,2y x y x -=-=.两式整体相减得,()()()2121212y y x x x x --=-+. 显然,21x x ≠ ∴2121212x x y y x x --⋅-=+. 而,2,2212121x x x x x y y =+=--∴42-=x , .02=+x 联立y x 22-=与02=+x 解得,.2-=y 因此抛物线y x 22-=中斜率为2 的平行弦的中点的轨迹方程是)2(02-<=+y x .5、向量法由于平面向量在直角坐标系下可以用坐标表示,这就为用向量法处理抛物线问题提供了可能性. 对于某些抛物线问题,假设能活用平面向量知识求解,往往十分简捷, 给人以耳目一新之感.例5 A(x 1, y 1), B(x 2, y 2)是抛物线x 2=2py(p >0)上的两点,且OA ⊥OB(O 为原点). 求证:x 1x 2=-4p 2,y 1y 2 = 4p 2.证明:如图2,∵x 12= 2py 1, x 22= 2py 2,∴y 1= px 221, y 2= p x 222. o ∴OA=(x 1,y 1)=(x 1, px 221), OB=(x 2, y 2)=(x 2, p x 222). (图2) ∵OA ⊥OB ,∴OA ·OB=0,即 x 1x 2+241p(x 1x 2)2=0, 而x 1x 2≠0, ∴x 1x 2= -4p 2. 进而y 1y 2=241p (x 1x 2)2=4p 2. 以上介绍了破解抛物线问题的五种方法. 解题的关键在于根据问题的特征选择恰当的方法, 有时候还需要几种方法融为一体, 共同发挥作用.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADI隐式交替法三种解法及误差分析(一般的教材上只说第一种)理论部分参看孙志忠:偏微分方程数值解法注意:1.最好不要直接看程序,中间很多公式很烦人的(一定要小心),我写了两天,终于写对了。
2.中间:例如r*(u(i-1,m1,k)+u(i+1,m1,k))形式写成分形式:r*u(i-1,m1,k)+r*u(i+1,m1,k)后面会出错,我也不是很清楚为什么,可能由于舍入误差,或者大数吃掉小数的影响。
3.下面有三个程序4.具体理论看书,先仔细看书(孙志忠:偏微分方程数值解法)或者网上搜一些理论。
Matlab程序:1.function [u u0 p e x y t]=ADI1(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u0(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))]; u0([1 m2+1],j,k)=[exp(0.5*x(j)-t0(k)) exp(0.5*(1+x(j))-t0(k))];endendr=h2/(h1*h1);r1=2*(1-r);r2=2*(1+r);for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r2*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+...h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r2*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend2.function [u p e x y t]=ADI2(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(D'Yakonov交替方向隐格式)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u'(i,j,k)(引入的过渡层),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;y=(0:m2)*h1+0;t=(0:n)*h2+0;t0=(0:n)*h2+1/2*h2;%定义t0是为了f(x,y,t)~=0的情况% for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));%编程时-t0(k)写成了+t0(k),导致错误;endendend%初始条件for i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endend%边界条件for k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))];endendr=h2/(h1*h1);r4=1+r;r5=r/2;for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=r4*u(i,[1 m1+1],k+1)-r5*(u(i-1,[1 m1+1],... k+1)+u(i+1,[1 m1+1],k+1));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendr1=r-r*r;r2=2*(r-1)*(r-1);r3=r*r/2;for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=2*r4*ones(1,m1-1);d(1)=r*u0(i,1,k)+r1*(u(i-1,2,k)+u(i,1,k)+u(i+1,2,k)+...u(i,3,k))+r2*u(i,2,k)+r3*(u(i-1,1,k)+...u(i+1,1,k)+u(i-1,3,k)+u(i+1,3,k))+2*h2*f(i,2,k);for l=2:m1-2d(l)=r1*(u(i-1,l+1,k)+u(i,l,k)+u(i+1,l+1,k)+...u(i,l+2,k))+r2*u(i,l+1,k)+r3*(u(i-1,l,k)+...u(i+1,l,k)+u(i-1,l+2,k)+u(i+1,l+2,k))+2*h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r1*(u(i-1,m1,k)+u(i,m1-1,k)+...u(i+1,m1,k)+u(i,m1+1,k))+r2*u(i,m1,k)+...r3*(u(i-1,m1-1,k)+...u(i+1,m1-1,k)+u(i-1,m1+1,k)+u(i+1,m1+1,k))+2*h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);end%回代过程%u0(i,m1,k)=d(m1-1)/b(m1-1);for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=2*r4*ones(1,m2-1);d(1)=r*u(1,j,k+1)+2*u0(2,j,k);for l=2:m2-2d(l)=2*u0(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=2*u0(m2,j,k)+r*u(m2+1,j,k+1);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend3.function [u u0 p e x y t]=ADI5(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,未截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u1(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendr=h2/(h1*h1);r1=2*(1-r);r2=r/4;r3=2*(1+r);for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=u1(i,[1 m1+1],k)-r2*(u(i-1,[1 m1+1],k+1)-...2*u(i,[1 m1+1],k+1)+u(i+1,[1 m1+1],k+1)-u(i-1,[1 m1+1],k)+...2*u(i,[1 m1+1],k)-u(i+1,[1 m1+1],k));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendfor k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组%for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r3*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+... h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r3*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解 e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend[up e x y t]=ADI2(0.01,0.001,100,100,1000);surf(x,y,e(:,:,1001)) t=1的误差曲面下面是三种方法的误差比较:1.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)(t=1时的误差)2.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) surf(x,y,e(:,:,11))(表示t=1时的误差)下面是相关数据:1: [u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00040947 0.00025182 0.00019077 0.00017112 0.000176040 0.00057359 0.00042971 0.00035402 0.00032565 0.000336280 0.00066236 0.00054689 0.00047408 0.00044596 0.000462670 0.00072152 0.00062001 0.00055081 0.00052442 0.000545530 0.00076164 0.0006576 0.00058522 0.00055732 0.000579840 0.00078336 0.00065993 0.00057557 0.00054161 0.000562090 0.00078161 0.00061872 0.00051646 0.00047429 0.000489640 0.00073621 0.0005148 0.00039979 0.00035439 0.000363130 0.00056964 0.00031688 0.00022051 0.0001884 0.000191920 0 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00027006 0.00016305 0.00012104 0.0001071 0.000109950 0.00037754 0.00027817 0.0002253 0.00020483 0.000211160 0.00043539 0.00035386 0.00030207 0.00028124 0.00029140 0.00047398 0.00040104 0.00035113 0.00033111 0.000344050 0.0005003 0.00042535 0.00037309 0.0003519 0.000365710 0.00051479 0.00042699 0.00036681 0.00034164 0.00035410 0.00051415 0.00040056 0.00032887 0.0002985 0.000307640 0.00048504 0.0003335 0.00025411 0.0002221 0.000227060 0.00037609 0.00020532 0.00013956 0.00011718 0.000119020 0 0 0 0 03.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 8.6469e-006 1.4412e-005 1.8364e-005 2.091e-005 2.2174e-0050 1.4412e-005 2.4777e-005 3.2047e-005 3.6716e-005 3.8961e-0050 1.8364e-005 3.2047e-005 4.1789e-005 4.8054e-005 5.1008e-0050 2.091e-005 3.6716e-005 4.8054e-005 5.5353e-005 5.8764e-0050 2.2174e-005 3.8961e-005 5.1008e-005 5.8764e-005 6.2389e-0050 2.2118e-005 3.8698e-005 5.0523e-005 5.8126e-005 6.171e-0050 2.055e-005 3.5581e-005 4.6157e-005 5.2942e-005 5.6197e-0050 1.707e-005 2.8951e-005 3.7128e-005 4.2365e-005 4.4952e-0050 1.0851e-005 1.7698e-005 2.2265e-005 2.5203e-005 2.672e-0050 0 0 0 0 01.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)Columns 7 through 110 0 0 0 00.00020348 0.00026228 0.00038338 0.00066008 00.00038607 0.00048321 0.00064717 0.00091668 00.00052635 0.00064203 0.00081637 0.0010517 00.0006174 0.00074272 0.00092111 0.0011417 00.00065651 0.00078964 0.00097724 0.0012051 00.00064051 0.00078116 0.00098594 0.0012433 00.00056474 0.00070822 0.00093332 0.0012478 00.00042547 0.00055526 0.00078616 0.0011844 00.00022735 0.00030946 0.00049004 0.00092402 00 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)Columns 7 through 110 0 0 0 00.00012826 0.00016798 0.00024986 0.00043637 00.00024444 0.00031023 0.00042173 0.00060513 00.00033401 0.00041257 0.00053179 0.00069358 00.00039216 0.00047742 0.00059986 0.00075263 00.00041704 0.00050761 0.00063642 0.00079439 00.00040657 0.0005021 0.00064226 0.00081984 00.00035784 0.000455 0.00060828 0.00082334 00.00026866 0.00035628 0.00051263 0.0007824 00.00014262 0.00019789 0.00031956 0.0006113 00 0 0 0 0 3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) Columns 7 through 110 0 0 0 02.2118e-005 2.055e-005 1.707e-005 1.0851e-005 03.8698e-005 3.5581e-005 2.8951e-005 1.7698e-005 05.0523e-005 4.6157e-005 3.7128e-005 2.2265e-005 05.8126e-005 5.2942e-005 4.2365e-005 2.5203e-005 06.171e-005 5.6197e-005 4.4952e-005 2.672e-005 06.1116e-005 5.5803e-005 4.4817e-005 2.6785e-005 05.5803e-005 5.1239e-005 4.1529e-005 2.5153e-005 04.4817e-005 4.1529e-005 3.42e-005 2.126e-005 02.6785e-005 2.5153e-005 2.126e-005 1.3869e-005 00 0 0 0 0。