转台计算机伺服控制系统设计
方位双稳定转台伺服系统的设计与实现剖析
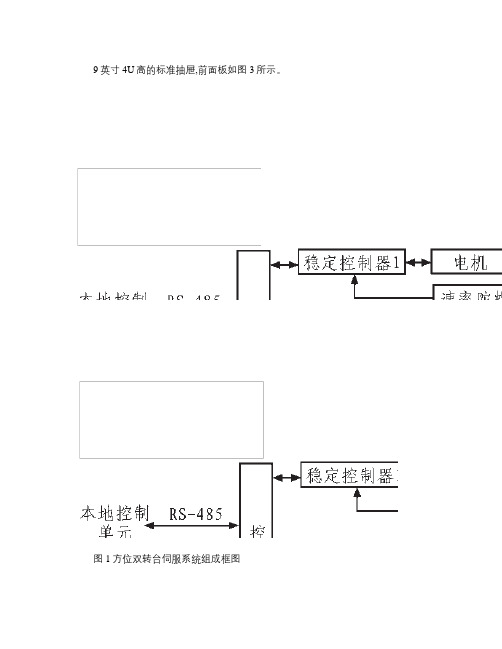
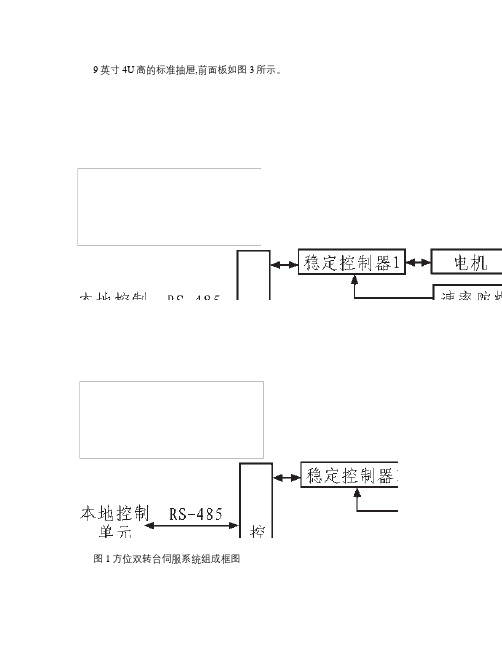
9英寸4U高的标准抽屉,前面板如图3所示。
图1方位双转台伺服系统组成框图-71-《电子设计工程》2010年第6 期图3转台控制器前面板示意图图4加固PC-104计算机好的抗振性,适用于环境恶劣的机载设备。
经过加固后的PC-104计算机如图4所示。
转台控制计算机软件采用Windows NT 操作系统[3],便于开发,具有高可靠性、安全性等特点。
软件模块主要包括实时控制和人机接口两部分。
实时控制部分主要包括数据采集、坐标变换、网络及串口通讯、控制保护等;人机接口部分主要包括显示管理、参数管理、故障监测等模块。
驱动电路由电机-测速机组、功率放大器、电流环、速度环和EMI 滤波电路组成。
主要用于功率放大、电流控制等。
驱动电机选用永磁直流力矩电机,功率放大选用线性功率放大器,动态性能好,电磁干扰小、简单、可靠。
稳定陀螺选用航空速率陀螺,构成陀螺稳定环,以隔离动载体姿态变化对跟踪的影响。
转台控制器的主要工作方式有待机、指向、程序跟踪。
3转台双转台是安装于某工程动载体上的机电设备,转台采用高精度齿轮驱动,为控制转台的重量及满足动载体设备的环境要求,选用铝合金材料柔性加工,齿轮及轴采用合金钢,轴承采用高精度圆锥滚子轴承及球轴承[4],以便于提高转台刚度和机械性能。
4稳定转台引导原理稳定转台引导原理图如图5所示,它利用惯性导航系统(INS 给出动载体所在的地理经度、纬度,动载体姿态参数(动载体相对正北方向的航向角k 、动载体相对水平面的横滚角Φ、动载体相对水平面的俯仰角θ,再根据上位机的位置指令,通过控制计算机计算两个转台的方位角,进行引导,使转台实时随动[5]于上位机指令。
根据本地控制单元的命令和动载体上的INS 测出的动载体位置经纬度和动载体姿态,可以计算出转台对目标跟踪的机体角度,假设动载体经度为λ0,纬度为φ0;目标点经度为λA ,纬度为φA ;则两点的方位角αα=tan-1sin (λA -λ0cos φAcos φ0sin φA -sin φA cos (λA -λ0(1α为大地角度,通过坐标转换成甲板角度α′α′=tan -1sin Φsin θcos EL cos (α-k +cos Φcos EL sin (α-k -sin Φcos θsin EL((2因为转台只在水平方向作一维转动,所以式(2中转台俯仰角EL 为0°,则简化式(2α′=tan -1sin Φsin θcos (α-k +cos Φsin (α-kcos Φcos (α-k(3若α′>45°且α′<135°,为转台1工作,转动角度为:若α′-90°;α′>225°且α′<315°,为转台2工作,转动角度为:α′-270°。
双轴跟踪转台伺服控制系统的建模及控制方法研究

摘要高精度转台在军事、航天航空、光电领域等得到越来越广泛的应用。
转台伺服系统一般是由转台机械本体和运行控制系统等构成,是雷达、坦克、射电天文望远镜等装备的重要组成部分。
主要性能指标包括系统的响应速度、低速运行平稳度和跟踪精度、抗干扰能力等。
本文以某双轴跟踪转台为研究对象,对其进行稳定跟踪控制算法的研究。
因为摩擦、齿隙、机械形变等扰动因素的存在使得双轴跟踪转台系统具有非线性的特点,滑模变结构控制算法对非线性系统有着较好的控制效果,本文设计的基于积分型切换增益的滑模变结构控制方法能保证控制系统的跟踪稳定性并且有较好的摩擦干扰抑制能力。
本文的主要内容是研究双轴跟踪转台的系统稳定跟踪控制问题,具体的工作如下:第一,通过机理模型建立双轴转台系统的单轴数学模型,同时对摩擦扰动进行LuGre模型的数学模型建立,并且根据坐标变换得到转台双轴联动的数学模型,这些工作为后续控制算法的构建和仿真模型奠定了基础。
第二,本文针对双轴跟踪转台的结构,基于RTU-BOX实时仿真平台开发了包含上位机的实时控制系统。
通过以太网通信实现串口通讯,实时数据读取、保存双轴跟踪转台系统的转速,为后续的LuGre模型参数辨识和控制算法做好实验准备。
第三,根据所建立的双轴跟踪转台伺服系统模型,设计了PD控制算法、基于趋近律算法的滑模控制算法和基于积分型切换增益的滑模控制算法对双轴跟踪转台的稳定控制和稳定跟踪问题进行研究。
其中,基于积分型切换增益的滑模控制算法不仅对摩擦扰动的抑制能力更强,而且鲁棒性更好。
Simulink仿真和RTU-BOX实时仿真结果证明了本文提出方法的有效性。
本文获得国家自然科学基金项目复杂电机系统关键基础问题研究51637001和国家自然科学基金青年基金( 51507001)的资助。
关键词:双轴跟踪转台,LuGre摩擦模型,滑模控制,实时仿真AbastractHigh-precision turntables have become more and more widely used in military, aerospace, and photovoltaic fields. The turntable servo system is generally composed of the turntable mechanical body and operation control system, etc. It is an important part of equipment such as radar, tanks, and radio astronomical telescopes. The main performance indicators include the system's response speed, low-speed operation stability and tracking accuracy, anti-interference ability, etc. In this paper, a dual-axis tracking turntable is taken as the research object, and the stable tracking control algorithm is studied. Because of the existence of disturbance factors such as friction, backlash, mechanical deformation, etc., the dual-axis tracking turntable system has nonlinear characteristics, and the sliding mode variable structure control algorithm has a better control effect on the nonlinear system. The sliding mode control method can ensure the tracking stability of the control system and has better interference suppression ability.The main content of this article is to study the system stability tracking control problem of dual-axis tracking turntable. The specific work is as follows:Firstly, the single-axis mathematical model of the dual-axis turntable system is established through the mechanism model, and the mathematical model of the dual-axis linkage of the turntable is obtained according to the coordinate transformation. At the same time, the mathematical model of the LuGre model for friction disturbance is established. These work are the construction of subsequent control algorithms And the simulation model laid the foundation.Secondly, this paper develops a real-time control system including a host computer for the structure of a dual-axis tracking turntable based on the RTU-BOX real-time simulation platform. Serial communication is realized through Ethernet communication, real-time data is read, and the rotation speed of the dual-axis tracking turntable system is saved, so that itis ready for the experiment of subsequent LuGre model parameter identification and control algorithm.Thirdly, based on the established dual-axis tracking turntable servo system model, the PD control method, sliding mode control method based on approach law method and sliding mode control method based on integral switching gain are designed to stabilize the dual-axis tracking turntable and stability tracking issues. Among them, the sliding mode control method based on integral switching gain not only has stronger ability to suppress friction disturbance, but also has better robustness. Simulink simulation and RTU-BOX real-time simulation results prove the effectiveness of the proposed method.This thesis was supported by the National Natural Science Foundation of China 51637001, a study on key basic problems of complex motor systems and the National Natural Science Foundation of China Youth Fund (51507001).Key words: Dual-axis tracking turntable, LuGre friction model, Sliding mode control, Real-time simulation目录第一章绪论 (1)1.1课题的研究背景及意义 (1)1.2 国内外双轴转台伺服系统的研究现状 (3)1.3 论文主要研究内容 (5)第二章双轴跟踪转台系统建模 (7)2.1 摩擦模型简介 (7)2.1.1 Stribeck摩擦力的基本原理简介 (7)2.1.2 LuGre摩擦模型 (9)2.1.3 LuGre模型参数的辨识设计 (10)2.2 双轴跟踪转台的数学模型 (13)2.2.1双轴系统的动力学建模 (15)2.3 本章小结 (21)第三章双轴跟踪转台硬件结构和控制系统 (22)3.1 系统硬件介绍 (22)3.2 RTU-BOX实时仿真控制系统 (26)3.3 本章小结 (29)第四章基于趋近律方法的双轴跟踪转台滑模控制器设计 (30)4.1 滑模变结构控制基本原理 (30)4.2 基于趋近律方法的滑模变结构控制器设计 (32)4.3 稳定性证明 (33)4.4 仿真结果分析 (34)4.4.1 基于PD模型的仿真模型 (34)4.4.2 基于趋近律方法的滑模控制器的摩擦补偿仿真模型 (34)4.5 本章小结 (38)第五章基于积分型切换增益的双轴跟踪转台滑模控制器设计 (39)5.1 具有积分型切换增益的滑模控制器设计 (39)5.2 稳定性证明 (40)5.3 仿真结果分析 (40)5.4 RTU-BOX实时仿真结果分析 (43)5.5 本章小结 (46)总结与展望 (47)总结 (47)工作展望 (47)参考文献 (49)致谢 (53)攻读学位期间发表的学术论文 (54)安徽大学硕士学位论文1 第一章 绪论1.1 课题的研究背景及意义转台系统的发展不断受到世界各国的重视。
基于频谱响应的伺服转台控制系统设计及改进
基于频谱响应的伺服转台控制系统设计及改进频谱响应是伺服转台控制系统中的重要指标之一,它反映了系统的频率响应特性。
基于频谱响应的控制系统设计和改进可以提高系统的稳定性和性能。
本文将从控制系统设计的角度出发,讨论基于频谱响应的伺服转台控制系统的设计及改进。
我们需要确定系统的频谱响应要求。
在伺服转台控制系统中,频谱响应通常要求具有较高的增益和相位裕度,以确保系统的稳定性和性能。
增益和相位裕度越大,系统的稳定性越好。
对于一般的伺服转台控制系统,通常需要保证在所需频率范围内,系统的增益不小于某个给定的值,相位裕度不小于某个给定的值。
我们需要选择合适的控制器结构。
常见的控制器结构包括比例控制器、积分控制器、微分控制器和PID控制器等。
根据系统的频谱响应要求,我们可以选择合适的控制器结构。
一般来说,PID控制器是一种常用且有效的控制器结构,它可以根据系统的频谱响应要求来调整控制器的各个参数,以实现系统的稳定性和性能。
然后,我们需要对控制器参数进行优化。
常见的控制器参数优化方法包括试验法、经验法和理论法等。
试验法是一种常见而直接的优化方法,它可以通过实验来调整控制器的参数。
经验法是基于经验的优化方法,它通过对类似系统的调试经验来确定合适的控制器参数。
理论法是通过理论分析来确定控制器的参数,它可以根据系统的频谱响应要求来确定控制器的最佳参数。
我们需要对控制系统进行仿真和实验验证。
仿真和实验验证是评估控制系统设计效果的重要手段。
通过对控制系统进行仿真和实验验证,可以验证系统的频谱响应是否符合要求,以及控制器参数优化是否有效。
如果控制系统设计效果不理想,我们可以进一步改进控制器参数,以达到系统的频谱响应要求。
基于频谱响应的伺服转台控制系统设计及改进是一个复杂而关键的技术问题。
通过合理选择控制器结构、优化控制器参数和进行仿真和实验验证,可以实现系统的稳定性和性能的提升。
基于频谱响应的伺服转台控制系统设计及改进

基于频谱响应的伺服转台控制系统设计及改进一、绪论随着数字化的发展,伺服技术的应用越来越广泛,其复杂性也随之增加,控制环节则是保证系统正常运行的重要组成部分。
伺服系统转台控制准确度高是保证整个系统运行平稳的关键所在,常见的伺服系统控制方式有两种,如PID及基于频谱响应的控制。
本文以数字化伺服系统应用为背景,以基于频谱响应的伺服系统转台控制系统为研究范围,介绍频谱响应控制的实现过程以及其优势。
1、频谱响应的概念频谱响应控制是一种系统优化技术,它利用系统谱的概念确定最佳的PID控制参数以及各种额外的控制因素,能够有效的改善系统谱的形状,从而改善系统的效果与性能。
它可以在低频振荡、高频振荡和高频可压缩振荡之间进行抉择。
2、转台控制系统的设计转台控制系统涉及传感器、移动装置、控制处理器、控制算法等环节,其设计需要满足速度、加速度、稳定度等性能指标,一般包括以下几个部分组成:(1)传感器件;(2)控制处理器;(3)控制算法;(4)移动机构等。
3、基于频谱响应的改进基于频谱响应的伺服控制方法能够较好地提高系统转台性能,进而解决转台控制系统存在的高抗性、慢响应和大抗扰度等问题。
采用频谱响应控制可将转台操作任务分解为无级的响应,高可调节性和精确控制,从而达到可容忍的振荡、更低的抗扰度和更强稳定性的转台控制。
三、结论以上介绍了基于频谱响应的伺服转台控制系统的设计和改进,通过基于频谱响应的控制方法不但可以优化现有的伺服系统转台的控制,而且还可以改善系统的效率,达到一定的抗干扰性和稳定性。
基于频谱响应的控制是一种有效的优化伺服系统性能的方式,将在未来得到更广泛的应用。
二维雷达转台伺服控制系统的设计与开发
二维雷达转台伺服控制系统的设计与开发二维雷达转台伺服控制系统的设计与开发引言随着科技的不断进步和应用的广泛推广,雷达技术在军事、民用、科研等领域起着重要作用。
而二维雷达系统中的转台伺服控制系统是实现雷达目标跟踪和测量的关键部分。
本文将介绍二维雷达转台伺服控制系统的设计与开发过程,通过分析系统的结构、功能和工作原理,进一步提升系统的控制性能和稳定性。
一、系统设计理念和要求二维雷达转台伺服控制系统的设计是基于对雷达运行过程中需要实现的目标跟踪和测量要求的分析。
系统要求具备以下特点:1.精确性:转台伺服控制系统需要能够精确定位并跟踪目标,准确测量目标与雷达之间的距离和方位角。
2.稳定性:系统需要具备稳定的控制性能,能够快速响应信号,抵抗外界干扰和噪声。
3.可靠性:转台伺服控制系统要求具备高可靠性,保证雷达在长时间运行中的稳定性和准确性。
4.可扩展性:系统需要能够灵活适应不同工作环境和场景的需求,并具备可扩展性。
二、系统结构设计基于对系统设计理念和要求的分析,我们提出了以下系统结构设计方案:1.硬件结构:转台伺服控制系统由转台部分、伺服电机、传感器和控制器等组成。
其中转台部分实现转动功能,伺服电机驱动转台运动,传感器用于获取目标信息,而控制器根据传感器数据实现对伺服电机的精确控制。
2.软件结构:软件部分主要是指转台控制算法和数据处理模块。
转台控制算法主要根据传感器数据计算出目标的位置,再通过控制器将控制信号传递给伺服电机实现转台的定位和跟踪。
数据处理模块负责对获取的数据进行处理和分析,提取有效信息并进行存储和显示。
三、系统功能设计基于系统的设计理念和要求,我们确定了以下系统功能设计:1.目标跟踪功能:通过传感器获取目标的信息,计算目标的位置和方位角,并通过控制算法实现对伺服电机的控制,实现目标的准确跟踪和定位。
2.测量功能:通过传感器获取雷达和目标之间的距离和方位信息,根据传感器数据进行精确计算,实现目标与雷达的测量。
方位双稳定转台伺服系统的设计与实现(精)
9英寸4U高的标准抽屉,前面板如图3所示。
图1方位双转台伺服系统组成框图-71-《电子设计工程》2010年第6 期图3转台控制器前面板示意图图4加固PC-104计算机好的抗振性,适用于环境恶劣的机载设备。
经过加固后的PC-104计算机如图4所示。
转台控制计算机软件采用Windows NT 操作系统[3],便于开发,具有高可靠性、安全性等特点。
软件模块主要包括实时控制和人机接口两部分。
实时控制部分主要包括数据采集、坐标变换、网络及串口通讯、控制保护等;人机接口部分主要包括显示管理、参数管理、故障监测等模块。
驱动电路由电机-测速机组、功率放大器、电流环、速度环和EMI 滤波电路组成。
主要用于功率放大、电流控制等。
驱动电机选用永磁直流力矩电机,功率放大选用线性功率放大器,动态性能好,电磁干扰小、简单、可靠。
稳定陀螺选用航空速率陀螺,构成陀螺稳定环,以隔离动载体姿态变化对跟踪的影响。
转台控制器的主要工作方式有待机、指向、程序跟踪。
3转台双转台是安装于某工程动载体上的机电设备,转台采用高精度齿轮驱动,为控制转台的重量及满足动载体设备的环境要求,选用铝合金材料柔性加工,齿轮及轴采用合金钢,轴承采用高精度圆锥滚子轴承及球轴承[4],以便于提高转台刚度和机械性能。
4稳定转台引导原理稳定转台引导原理图如图5所示,它利用惯性导航系统(INS 给出动载体所在的地理经度、纬度,动载体姿态参数(动载体相对正北方向的航向角k 、动载体相对水平面的横滚角Φ、动载体相对水平面的俯仰角θ,再根据上位机的位置指令,通过控制计算机计算两个转台的方位角,进行引导,使转台实时随动[5]于上位机指令。
根据本地控制单元的命令和动载体上的INS 测出的动载体位置经纬度和动载体姿态,可以计算出转台对目标跟踪的机体角度,假设动载体经度为λ0,纬度为φ0;目标点经度为λA ,纬度为φA ;则两点的方位角αα=tan-1sin (λA -λ0cos φAcos φ0sin φA -sin φA cos (λA -λ0(1α为大地角度,通过坐标转换成甲板角度α′α′=tan -1sin Φsin θcos EL cos (α-k +cos Φcos EL sin (α-k -sin Φcos θsin EL((2因为转台只在水平方向作一维转动,所以式(2中转台俯仰角EL 为0°,则简化式(2α′=tan -1sin Φsin θcos (α-k +cos Φsin (α-kcos Φcos (α-k(3若α′>45°且α′<135°,为转台1工作,转动角度为:若α′-90°;α′>225°且α′<315°,为转台2工作,转动角度为:α′-270°。
基于频谱响应的伺服转台控制系统设计及改进
基于频谱响应的伺服转台控制系统设计及改进一、引言伺服转台是一种用于精确定位和跟踪目标的关键设备,被广泛应用于天文观测、飞行模拟器、光学成像以及雷达跟踪等领域。
伺服转台的控制系统对其性能起着至关重要的作用。
在伺服转台控制系统设计中,频谱响应是一种重要的分析工具,它可以用来评估系统的稳定性和性能,并进一步指导改进设计。
本文将介绍基于频谱响应的伺服转台控制系统设计及改进的方法和技术。
首先将介绍伺服转台的控制系统基本原理和结构,然后介绍频谱分析在伺服转台控制系统设计中的作用,最后讨论一些改进设计的方法和技术。
二、伺服转台的控制系统伺服转台的控制系统通常由传感器、执行器、控制器和反馈环路组成。
传感器用于测量转台的实际位置和速度,控制器根据传感器的反馈信号计算出控制指令,执行器根据控制指令驱动转台执行相应的动作。
反馈环路通过将控制指令和实际位置进行比较,实现对转台位置的闭环控制。
伺服转台的控制系统需要具备良好的动态性能和稳定性,以实现对目标的精确跟踪和定位。
传统的控制方法如PID控制器可以实现基本的稳定控制,但在一些要求更高的应用场景下,需要对控制系统进行进一步的设计和改进。
频谱分析是一种用于分析信号的频率特性的方法,它可以通过对信号在频域上的表示来揭示信号的频率成分和振荡特性。
在伺服转台控制系统设计中,频谱分析可以用来评估系统的频率响应特性,分析系统的稳定性和性能。
在伺服转台控制系统设计及改进中,可以采用频谱分析和改进设计的方法和技术,来提高系统的性能和稳定性。
1. PID控制器参数调整传统的PID控制器是一种常用的闭环控制方法,但在频率响应特性上存在一些不足。
可以通过频谱分析得到系统的频率响应特性,然后进一步对PID控制器的参数进行调整,以满足系统的性能要求。
如通过频谱分析可以得到系统在低频和高频下的增益和相位特性,然后对PID控制器的比例、积分和微分参数进行调整,以实现对系统频率响应的更好控制。
2. 频率补偿设计在伺服转台控制系统设计中,可以使用频率补偿技术来改善系统的频率响应特性。
基于频谱响应的伺服转台控制系统设计及改进

基于频谱响应的伺服转台控制系统设计及改进1. 引言1.1 研究背景当前,伺服转台控制系统在工业生产、科研领域以及军事应用中扮演着重要角色,其性能的稳定性和精准性对系统整体运行起着至关重要的作用。
随着科学技术的不断进步,对伺服转台控制系统的要求也日益提高,如何提高其控制性能及性能指标成为学术界和工程界共同关注的焦点。
基于频谱响应的伺服转台控制系统设计及改进是当前研究的热点之一,通过对频谱响应分析和伺服转台特性分析,可以更好地理解系统的工作原理和特性。
控制系统设计方法和控制算法改进是提高系统响应速度和稳定性的关键,通过实验验证可以验证新算法的有效性和性能优势。
本研究旨在探讨基于频谱响应的伺服转台控制系统设计及改进的方法,旨在通过研究对控制系统性能的提高,为实际工程应用提供技术支持和方法指导。
本研究对于提高伺服转台控制系统的稳定性和精准性具有重要意义,并将为相关领域的研究和应用带来新的思路和方法。
1.2 研究目的本文的研究目的旨在探讨基于频谱响应的伺服转台控制系统设计及改进的方法与技术。
通过研究控制系统设计方法、频谱响应分析、伺服转台特性分析、控制算法改进和实验验证等内容,旨在提高伺服转台系统的控制性能和稳定性,从而满足不同应用场景下的精密定位和跟踪需求。
通过深入分析系统的特性和响应规律,我们希望能够提出有效的控制算法改进方案,进一步优化系统性能。
通过实验验证,验证改进控制算法的有效性和可靠性,为伺服转台系统的应用提供更好的技术支持。
通过本次研究,我们旨在为伺服转台控制系统的设计和改进提供新的思路和方法,推动相关领域的技术进步和发展。
1.3 研究意义研究意义是本研究的重要性所在,伺服转台控制系统在现代工程领域中扮演着重要角色。
通过基于频谱响应的控制系统设计及改进,可以提高伺服转台系统的性能和稳定性。
这对于一些需要精准控制和高速响应的行业来说具有重要意义,比如航空航天、军事装备、工业自动化等领域。
通过对伺服转台控制系统进行优化和改进,可以提高系统的精度、响应速度和抗干扰能力,从而提升系统的整体性能,降低生产成本,提高生产效率。
单轴转台伺服控制系统电路设计

关 键 词 : 轴 转 台 :永磁 同步 电机 ; 能 功 率模 块 ; R K 0 单 智 IMC 2 3
中 图分 类 号 : P 9 ; M3 1 T 3 1T 4 文献标识码 : A
3 硬 件 设 计
图 1为 基 于 I M K 0 R C 2 3的 永 磁 同 步 电 机 伺 服 控 制 系 统 结构原理图 。
整 个 系 统 由主 电路 、 制 电路 和 辅 助 电路 组 成 。其 中 主 控
F g S r c u e o h e v o t ls se f rPMS i .1 tu t r ft e s r o c n r y t m o o M
算 、 lr 换 等 闭 环 控 制 所 需 的 所 有 功 能 单 元 . 有 功 能 全 C ak变 所
调节器参数 、 电流 反 馈 范 围 、W M 载 频 等 ) P 和监 视 系统 状 态 。 因 此 , 课 题 将 I MC 2 3作 为 主 控 芯 片 进 行 永 磁 同 步 本 R K0 电机伺服控制系统的硬件和软件设计 。
电路 由 电 源 模 块 、功 率 驱 动 电 路 和 永 磁 同 步 电 机 等 组 成 ; 控 制 电 路 由 T S 2 F 8 2 D P和 I M K 0 M 3 0 2 1 S R C 2 3以及 外 围 电 路 联
三 相 驱 动 电源 输 入 端 V F V F V B与 驱 动 电 源 G D U B、 V B、 WF N
a c u t r n RMC 0 s s r oc n r l ri p o o e h sp p r T e t e h r w r n ot a e a e d sg e a e s tao dI a a K2 3 a e v o t l r p s d i ti a e . h n, h ad a e a d s f r r e in d b s d oe s n w o eP 2 8 7 I M n RMC 0 . nt S 1 6 h P a dI K2 3
基于DSP和运动控制芯片的转台伺服控制设计

基于DSP和运动控制芯片的转台伺服控制设计随着现代工业自动化程度的不断提高,越来越多的设备需要实现高速转动并保持精准定位。
传统的基于机械传动的控制方式已经难以满足这种需求,而基于数字信号处理(DSP)和运动控制芯片的转台伺服控制成为了当前较为流行的控制方式。
该控制系统主要由DSP和运动控制芯片、电机和传感器等组成。
其中,DSP作为中央控制单元,负责接收来自传感器的反馈信号,并根据预设的运动规划算法进行控制,控制芯片则通过控制电机实现高精度、高速的转动。
在该控制系统中,反馈信号的采集和处理十分重要,基于光学原理的光栅尺和脉冲码盘成为了常用的选择。
当光栅尺或脉冲码盘与电机轴线相连时,传感器会持续对电机转动的速度、位置和加速度进行监测,将数据发送到DSP进行分析处理。
而在控制算法方面,PID控制器是应用最广泛的控制算法之一。
在PID控制器中,通过对反馈信号与预设信号的比较,计算误差,反馈给系统,并计算控制信号来调整电机的位置和速度,从而使电机实现精准控制。
除了PID控制器,其他控制算法也可根据具体场景进行选择。
此外,在该控制系统中,电机的选择也非常重要。
常见的电机类型有步进电机和伺服电机,它们各有优缺点。
步进电机相对简单,成本低,但其控制精度以及速度上都相对较低;伺服电机性能相对较优,可实现高速、高精度的控制,但相应的成本也更高。
总之,在基于DSP和运动控制芯片的转台伺服控制设计中,精准的传感器、优秀的控制算法以及适合的电机,都是实现高效、精确定位控制的必要条件。
随着技术的不断进步,相信该控制方式将在工业自动化控制领域中得到广泛应用。
为了更好地进行数据分析,需要明确数据来源和采集方法。
在这里,我们假设数据来源为某公司运营数据,采集方式为鼠标点击和键盘输入记录。
首先,我们可以列出以下相关数据:1. 月度销售额:包括每个月的销售额、同比增长率以及环比增长率等指标。
2. 产品类别销售额比例:分析不同产品类别的销售额比例,以及各类别的销售额排名。
基于频谱响应的伺服转台控制系统设计及改进
基于频谱响应的伺服转台控制系统设计及改进伺服转台是一种能够以高精度控制角度的位置、速度、加速度和扭矩输出的模块化设备。
它常被用于天文望远镜、激光精密加工、卫星通信等领域中。
设计一个高精度的伺服转台控制系统需要考虑许多因素,复杂的电子电路和通信协议使得这个过程变得更加复杂。
因此,本文将基于频谱响应的理论来介绍如何设计和改进一个具有高精度响应的伺服转台控制系统。
1. 理论基础频谱响应是指对于一个线性时不变系统,在输入信号变化的不同频率下系统的输出响应。
在数字信号处理领域中,频谱响应通常采用傅里叶变换的方式进行分析。
傅里叶变换将输入信号从时域转换到频域,使得我们可以更好地理解信号的频率特性。
基于频谱响应的系统设计可以更好地了解受控对象的响应规律,在设计控制器时提供更加精确的参考数据。
2. 设计原则在设计伺服转台控制系统时,需要考虑到以下几点原则:(1)稳定性:控制系统需要保证在全部工作范围内稳定。
(2)快速性:控制系统需要快速响应系统输入的变化。
(3)精度:控制系统需要提供高精度的控制信号以确保输出质量。
(4)低干扰:控制系统需要具有抗干扰能力,能够在噪声和干扰影响下仍然保持稳定。
(5)可靠性:控制系统需要具有高可靠性,能够在长时间工作中保持良好的性能。
3. 控制系统设计在设计伺服转台控制系统时,需要设计与受控物体匹配的控制器,以实现精确的姿态和位置控制。
控制器通常采用电子电路完成,接口电路通过数字通信与上一层控制系统连接。
关于控制器的设计,下面将具体介绍。
(1)控制器类型目前伺服转台控制器的类型主要有PID控制器和模糊控制器两种。
PID控制器具有优良的调整质量,稳定性高,但无法有效消除系统的不确定性。
模糊控制器具有较强的适应性,能够适应多变的工作环境,但其控制误差一般较大。
因此,在设计伺服转台控制系统时,可以通过PID控制器与模糊控制器两者的综合使用达到更好的控制效果。
在PID控制器中,P(比例)、I(积分)、D(微分)三者的参数需要在设计中根据实际条件进行优化,以达到更好的响应速度和稳定性。
基于频谱响应的伺服转台控制系统设计及改进

基于频谱响应的伺服转台控制系统设计及改进
伺服转台是一种常用于实验室、工业自动化等领域的运动控制设备。
它能够精确控制转台的位置、速度、加速度等参数,实现特定的运动轨迹。
为了提高伺服转台的运动控制性能,我们可以采用基于频谱响应的控制系统设计及改进方法。
我们需要进行系统的频谱响应测试。
通过在频率范围内输入一系列不同幅值和频率的输入信号,我们可以得到系统的频谱响应曲线。
频谱响应曲线可以反映系统的动态特性,包括增益、相位等信息。
接下来,根据频谱响应曲线,我们可以设计控制系统的频谱补偿器。
频谱补偿器是一种滤波器,可以根据频谱响应曲线来调整系统的频率响应。
通过将频谱补偿器作为系统的前馈控制器,可以使系统在特定频率范围内具有更好的控制性能。
在设计控制系统时,我们还可以采用PID控制器。
PID控制器是一种经典的控制器结构,可以根据系统的误差、变化率和积分误差来调整输出信号。
通过调整PID控制器的参数,我们可以得到系统的良好动态响应和鲁棒性。
我们还可以采用自适应控制算法来进一步提高控制系统的性能。
自适应控制算法可以根据系统的频谱响应和输入信号来自动调整控制器的参数。
通过自适应控制算法,系统可以根据实际情况来调整控制器的响应,从而提高系统的控制精度和稳定性。
基于频谱响应的伺服转台控制系统设计及改进可以通过频谱响应测试、频谱补偿器设计、PID控制器调节、自适应控制算法以及反馈控制等方法来实现。
这些方法可以提高系统的控制性能,使伺服转台能够实现更精确、稳定的运动控制。
程控双轴姿态转台伺服控制系统设计及应用
计算机测量与控制!"#""!$#!%"!!"#$%&'()'*+%('#',&-!",&(".!!#&#$!#收稿日期 "#"&#'".$!修回日期 "#"&&&"'%作者简介 肖支才!&'--"&男&湖北汉川人&博士&副教授&主要从事飞行器控制与测试方向的研究%通讯作者 侯鹏森!&''("&男&河南滑县人&硕士&主要从事飞行器控制与测试方向的研究%引用格式 肖支才&侯鹏森&刘玄冰&等!程控双轴姿态转台伺服控制系统设计及应用',(!计算机测量与控制&"#""&$#!%")&#$&#(!文章编号 &.-&%*'( "#"" #%#&#$#.!!/01 &#!&.*". 2!3456!&&7%-." 89!"#""!#%!#&(!!中图分类号 :;"-$^*文献标识码 <程控双轴姿态转台伺服控制系统设计及应用肖支才 侯鹏森 刘玄冰 代飞扬!海军航空大学岸防兵学院&山东烟台!".%##&"摘要 针对自主研发的程控双轴姿态转台伺服控制系统&阐述了其运动控制系统的基本工作原理$针对传统转台转速慢*精度差*系统动态性能和稳定性不佳等问题&设计了基于位置环*速度环和电流环三闭环控制的数字控制器$完成了控制系统控制算法的软件实现&利用`H X[64N I Z T=a1交互式编程平台研发了转台控制软件&可以对串口设置*;1/设置*驱动器设置等参数进行任意更改&使系统操作简便*可移植性强$最后对系统开展位置和速度跟踪性测试&测试结果表明系统性能达到预期&具有超调小*响应快*跟踪精度高和鲁棒性好等特点&满足系统设计要求&具有良好的应用价值%关键词 伺服系统$数字;1/控制器$复合控制器$三环控制4'+1;,*,56$$.17*&1","8P(";(*##*=.'J2"M*W1+6&&1&%5'J%(,&*=.':'(0"!",&(".:<+&'#B1<0>G63H6&?0b;E4D T E4&`1b B Q H4X64D&/<1\E6U H4D!=I K K E D E I L=I H T8/E L E43E<O S&@H V H K<E O I4H Q863H Kb46V E O T68U&)H48H6!".%##&&=G64H"6=+&(*7&)<6S64D H88G E T E O V I3I48O I K T U T8E S L I O T E K L W N E V E K I9E N9O I D O H S S H X K E N Q H K W H C6T H8868Q N E8Q O48H X K E&8G EX H T639O64369K EI L 68TS I86I43I48O I K T U T8E S6T E K H X I O H8E N!<6S64D H88G E9O I X K E S T I L T K I ZT9E E N&9I I O H33Q O H3U&9I I O T U T8E SN U4H S639E O L I O S H43E H4N T8H X6K68U L I O8O H N686I4H K8Q O48H X K E T&H N6D68H K3I48O I K K E O X H T E NI48G O E E3K I T E N W K I I93I48O I K I L9I T686I4K I I9&T9E E N K I I9H4N3Q O O E48K I I9 6TN E T6D4E N!8G E T I L8Z H O E H K D I O68G SI L8G E3I48O I K T U T8E S6T3I S9K E8E N!b T64D8G E`H X[64N I Z T=a1648E O H386V E9O I D O H S S64D9K H8L I O S8IN E V E K I98G E8Q O48H X K E3I48O I K T I L8Z H O E&U I Q3H43G H4D E8G E T E O6H K9I O8T E8864D T&;1/T E8864D T&N O6V E O T E8864D T H4NI8G E O9H O H S E8E O TH O E H O X68O H O6K U3G H4D E N&H4N8G E T U T8E S6T E H T U8I I9E O H8E H4NS6D O H8E!\64H K K U&8G E9I T686I4H4N T9E E N8O H3564D8E T8I L8G E T U T8E S Z H T3H O O6E NI Q8!:G E8E T8O E T Q K8T T G I Z8G H88G E9E O L I O S H43E I L8G E T U T8E SO E H3G8G E E C9E38E N3G H O H38E O6T863TI L T S H K K I V E O T G I I8&L H T8O E W T9I4T E&G6D G8O H3564D H33Q O H3U H4N T8O I4D O I X Q T84E T T!:G E T U T8E S S E E8T8G E N E T6D4O E Y Q6O E S E48T H4NG H T D I I NH99K63H86I4V H K Q E!>'<2"(5+)T E O V E O T U T8E S$N6D68H K;1/3I48O I K K E O$3I S9I Q4N3I48O I K K E O$8G O E E K I I93I48O I K!引言双轴转台是一种用于高精度运动测试的数字化设备&广泛应用国防工业*航空航天工业等众多领域'&(&它是惯导*陀螺测试系统的关键设备之一&可用于惯导*陀螺*加速度计等惯性器件的测试和标定&其对系统稳定性和动态性能有着较高的要求%双轴转台的控制系统是一个复杂的伺服控制系统&它能够控制转台以给定速度在规定时间内运动到给定位置处&而伺服驱动器控制策略和控制算法的好坏直接影响到双轴转台的控制精度'"(%目前常用的控制方法有;1/控制*复合控制等&文献'$(针对三环控制系统&对位置环参数采用了改进遗传算法进行优化&系统较好地实现了位置伺服$文献'%(采用模糊自整定;1/控制器对转台伺服控制系统进行设计&经验证系统具有超调小*响应快*精度高和鲁棒性好等特点$文献'*(在三环控制结构的基础上&采用神经网络对各环;1/参数进行优化$文献'.(对速度环的设计采用了滑膜控制器&并加入了非线性扩张状态观测器!@F J0"&有效提高系统的抗干扰性能%本文介绍的程控双轴转台的运动控制系统采用系统采用基于三闭环控制的数字控制器&三闭环从外之内依次为+位置环*速度环和电流环,&通过对;1/参数进行整定&可以提高转台的动态性能和静态性能&实现高精度控制'-(%@!系统结构及原理程控双轴转台的电气控制系统是一种典型的反馈闭环控制系统&主要由控制装置*执行机构*放大元件*反馈元件*测量元件和校正元件等部分组成'((&其中&直流伺服驱动器和直流伺服电机作为执行机构&圆同步感应器和解码芯片作为角位置和角速率反馈元件%三闭环控制系统三闭环采用全数字;1/算法&由主计算机控制器实现位置物理量的运动控制和管理%直流伺服驱动器采用;[M方式驱动直流电机转动&内嵌电流传感器产生电流反馈&构成;1电流闭环&可恒扭矩和恒功率输出控制%!!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#&#%!#直流伺服驱动器的控制接口为速度模拟电压指令信号&需要外部提供速度<-_脉冲反馈信号&才能构成速度闭环&这个反馈信号由解码器-数字解码芯片提供%圆同步感应器码盘无缝地固定在主轴和俯仰轴的转动轴承上&与两个轴同步转动&其输出的T 64和3I T 两路正交信号经高精度仪表放大器不失真地放大后&送给高精度宽带分解器-数字解码芯片&产生与转台角位置角度的&"位分辨率<-_信号送给直流伺服驱动器的速度反馈端&构成速度闭环%位置信号还可由位置寄存器直接读出&通过串行总线接口实时地发送给主计算机控制器&控制器上的用户软件通过读取这个当前位置信号&并以与目标指令位置相比较&误差值经过数字滤波处理后产生位置控制信号&发送给电机驱动器构成位置闭环%图&为三闭环伺服控制系统原理框图%图&!三闭环伺服控制系统原理框图程控双轴姿态转台电气控制系统有两个独立的控制回路&分别是主轴控制回路和俯仰轴控制回路&两个控制回路都由同一块控制板进行控制&主要实现角度和角速度的测量解算控制&解算出来的角度信号和角速度信号分别通过数字接口和<*_角增量脉冲信号送出%因为驱动器本身具有电流*速度双闭环控制&<-_脉冲作为转台对应的速度反馈信号形成速度闭环控制&角度信号通过转台控制器形成角度闭环控制%两个回路的伺服驱动器通过驱动信号电缆与台体内的直流电机相连&以控制电机的转动%A !控制系统数字控制器设计;1/控制器是连续系统控制理论中一种发展成熟*应用广泛的控制方法&其在实际工程实践中占有至关重要的地位''(&大多数控制回路都采用了;1/控制&其有着原理简单*结构灵活*鲁棒性好*参数整定方便等优点%目前数字;1/控制器已经完全取代模拟;1/控制器'&#(&常用的数字控制器设计方法有直接法和间接法%本论文介绍的双轴转台运动控制器采用间接法设计&首先设计出系统连续传递函数&然后通过双线性变换法离散化设计数字控制器%A B @!电流环控制器设计在三闭环伺服控制中&电流环起到了调节电流*保护电机和抗干扰等作用%在一般情况下&电流要比速度变化的快&因此对电流环调节进行设计时&常忽略感应电动势的影响&常用采用无静差输出的;1调节%同时&电流环一般只与;[M 逆变器和电机参数有关&可以将;[M 逆变器近似看作一阶惯性环节R =-!E ==9&"'&&(&其中R =为;[M装置的放大倍数&E =为;[M 装置的时间常数&得到电流环的闭环控制如图"所示%图"!电流环控制结构图其中)4<为积分时间常数&R ?为比例系数&R 6为积分系数&且有R 6.R ?-4<%E #为电枢回路电磁时间常数&且有E #."-A &'为电流环反馈系数%从图中可以看出电流环控制对象是;[M 逆变器和电机电枢回路这两个惯性环节的叠加&电流采样电路设计为一个低通滤波器&也可将其近似看作一阶惯性环节'&(%由此求得图中的开环传递函数为)F !=".R F R ='!4<=9&"4<=A !E ==9&"!E #=9&"!&"!!选择4<.E #."-A 可以使得电流调节器的零点与被控对象的大时间常数对消&考虑到电流环主要功能是加快电流的跟随效应&因此可以将电流环校正成-型系统%经过简化后的电流环开环传递函数为)F !=".R W=!E ==9&"!""!!其中)R W .R ?R ='-4<A %对应的电流环闭环传递函数为)Q <!=".F !="&9F !=".R W -E =="9=-E =9R W -E =!$"!!为了使超调量#)*_&令阻尼比0.#^-#-&同时设定;[M 逆变器输出电压与初始电压相等&有R =.&&求得R W E =k #^*&最终得到电流调节器的设计参数公式)R ?.R W A '4<.A '4<-"E =."'-"E =R 6.R ?-4<.A '-"0E !%"!!可以看出&由双惯性环节的控制对象构成的复杂系统经闭环控制后&简化为一个惯性环节&加快了电流的跟随作用'&"(%A B A !速度环控制器设计直流电机控制系统通常为双闭环结构&除了前面提到的电流环作为内环&还将速度环作为外环'&"(%电流环在速度环中等效为)W L !="Z -6!=".F !="'@&-'&-R W =9&!*"!!速度环的作用是控制转速跟随给定电压值的变化&将速度调节器的输出作为电流环的输入便可以得到速度电流双闭环结构&见图$%其中&)为速度环反馈系数&R (为速度调节器比例系数&4(为积分时间常数&^为转动惯量%图中可以看出&速度调节器采用了;1调节器&这是由于速度环要求实现速度无静差&因此扰动点后设计了一个积分环节&整个速度环的开环传递函数需要有两个积分环节&但同时其前向通道已经!第%期肖支才&等)""""""""""""""""""""""""""""""""""""""""""""""""""""程控双轴姿态转台伺服控制系统设计及应用#&#*!#图$!速度环控制结构图有了一个惯性环节&那么积分环节只能涉及到速度调节器中&所以采用了;1调节器'&$(%考虑到速度环要求具有高动态抗扰性&因此可以将速度环校正为典型.型系统&得到双闭环系统的开环传递函数为)Q (!=".R (!4(=9&"4(=.R ()!4(=9&"4('^="!=-R W 9&"!."!!根据文献'&%(可以得到速度调节器的设计参数公式)4<.;-R W R (.!;9&"'^R W -";0)!-"式中&;为中频带宽&结合系统的动态性能要求&取;.*时&系统动态响应最快'&%(%A B C !位置环控制器设计在双闭环控制的最外环加入位置环&便可以实现三闭环伺服控制%位置环的作用是实现高精度的位置控制&因此在设计时要尽可能保证输入位置信号能被准确复现&同时不希望出现超调和振荡&因此一般位置调节器采用比例调节器'&*(%跟电流环类似&位置环也要求具有良好的跟随性能&因此位置环的设计可以参考电流环的设计&将系统校正为典型-型系统%考虑到位置环截止频率远小于速度环时间常数的倒数&可以将其简化为一阶惯性环节和积分环节的组合&速度环的开环传递函数可近似等效为)X (!=".R :=!E :=9&"!("!!其中)E :为等效惯性环节时间常数&R :为速度环放大倍数%得到位置环的开环传递函数为)Q !!=".R ?R :=!E :=9&"!'"!!其中)R ?为位置调节器比例系数%通过分析式!'"&为了使系统超调量为零&R ?需要很小&但如果R ?过小&会影响系统动态响应性能&降低了系统的跟随性能%因此&为了加强位置环的跟踪特性&可以采用增加前馈环节的复合控制'&.(%采用比例加前馈控制的复合控制系统结构原理如图%所示%图%!复合控制结构图图中&Q &!="为比例控制器&Q "!="为控制对象&X !="为前馈补偿器&很容易求出其闭环传递函数)!!="!-!=".Q &!="Q "!="9X !="Q "!="&9Q &!="Q "!="!&#"!!设计前馈补偿器的传递函数为X !=".&Q "!="&则误差传递函数为)K !!="!-!=".&/!!="!-!=".&/Q &!="Q "!="9X !="Q "!="&9Q &!="Q "!=".#!&&"!!系统无稳态误差%由图%可以得到位置环的传递函数为)Q !!=".R F K !!="9X !="!-!="!&""!!取其差分方程得到位置环控制器的数学表达式为)Q !!Y ".R F K !!Y "9&R :'!-!Y "/!-!Y /&"(9E :R :'!-!Y "/"!-!Y /&"9!-!Y /""(!&$"式中&K !!Y "为位置给定值与实际输出值之间的偏差&!-!Y "为Y 时刻的位置采样值%C !控制系统的软件设计C B @!系统总体架构程控双轴姿态转台控制系统软件的主要功能是实现对主轴和俯仰轴两个控制回路的数字控制&同时对转台工作状态的实时监测与信息反馈%工作时&上位机通过]J "$"串口向驱动器发送控制指令&同时接受来自测速模块的信息&控制平台执行闭合*闲置*运行*停止*归零等操作&并将监测到的状态信息反馈至上位机%从功能上来看&程控双轴姿态转台控制系统软件主要由通信模块*控制模块和数据处理模块$部分组成&$个模块采用串口通信进行信息交互&完成对转台主轴和俯仰轴的运动控制以及速度信息和位置信息的数据采集与处理%图*为系统软件流程图%C B A !通信模块上位机与测速模块*数字驱动器之间均采用串口通信%直流伺服驱动器通过]J %""串口接受来自上位机发出的控制指令&波特率为'.##X 9T &同时上位机读取主轴和俯仰轴的位置*工作状态以及故障信息%每次返回的故障信息为一个&$位的字符串&数字驱动器发送某类错误保护&则将其对应的&变为#%例如&返回+/#####&###,d #C #/d #C #<&则表示驱动器发生失速保护$上位机与测速模块只进行单向通信&只读取主轴和俯仰轴的速度信息和位置信息&表&为测速模块串口协议%C B C !控制模块控制模块是控制转台运动的核心模块&主要实现电流环*速度环*电流环三闭环的数字程序调节%前面介绍&该控制模块的电流环和速度环采用;1算法&位置环采用比例加前馈控制的复合控制算法%具体工作步骤为&控制模块接收来自上位机的位置控制指令&首先进行位置计算与调节&随后进行速度环;1调节&主要完成测速与调速的功能&最后进行电流环的;1调节&速度环的输出作为电流环!!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#&#.!#图*!系统软件流程图表&!测速模块串口协议串口数据发送位数&&位串口波特率设置&&*"##串口发送周期&#S T 位置数据存放位#!$速度数据存放位%!-零位信号存放位(奇偶校验位'结束位&#的给定值&电流环当前状态下的电流值作为反馈&最终输出;[M 波占空比的控制量&该量被送至直流伺服电机控制电机&通过改变电机电枢两端的电压&改变电机的速度&以此控制电机的运动%图.为控制模块程序流程图%C B D !数据处理模块由于直流伺服驱动器的控制接口为速度模拟电压指令信号&需要外部提供速度<-_脉冲反馈信号&该信号需经过<-/转换成为数字信号&作为速度指令传输至驱动器&最终构成速度闭环&但经<-/转换后的数字信号将会出现噪声&因此需要进行滤波处理%每采集一次速度值&上位机都会给出相应的估计值%&将采集到的速度值与估计值做差&设定在&##!j -T"范围内为有效值&剔除不在此范围的无效值&之后对采取中值滤波的方法&对采集到的速图.!控制模块程序流程图度值进行平滑处理%D !实物平台验证D B @!平台介绍双轴姿态转台由机械台体和电气控制系统组成&其中机械台体为b W :结构&台面式:型主轴!即T 轴"为航向环&b 型俯仰轴!即%轴"为姿态环&用于转台引入北向基准&见图-%机械台体主要由主轴*俯仰轴*b 形座*底座*工作台面*角编码器和垫铁等部件组成%同时&台体上安装$!第%期肖支才&等)""""""""""""""""""""""""""""""""""""""""""""""""""""程控双轴姿态转台伺服控制系统设计及应用#&#-!#图-!转台外形正视图个直流伺服电机*"个圆感应同步器&"块前置放大板&它们的接口信号通过电缆与电气控制系统连接%电气控制系统包含控制器和驱动器两个机箱%控制器机箱内置高性能稳压线性多路输出电源&多功能信号处理板和=;b 主板等部件&共同构成了一个嵌入式计算机控制系统%驱动器机箱内装有主轴和俯仰轴直流伺服驱动器%主轴直流伺服驱动器与俯仰轴直流伺服驱动器通过驱动信号电缆与台体内的直流电机相连&以控制电机的转动%D B A !系统性能测试系统设计主要性能指标见表"%表"!系统部分性能指标角位置测量精度-!j ""h $测角重复性-!j ""h $速率精度-!&#j -T "#!"!j -T "速率平稳性-!&#j -T "#!"!j -T "主轴速率范围-!j -T "n #!#&!n &##俯仰轴速率范围-!j -T"n #!#&!n &##为了验证转台性能指标是否满足设计要求以及伺服控制系统控制策略的有效性&对其开展速度和位置跟踪测试%测试以主轴作为对象&利用基于`H X [64N I Z T =a 1"#&$开发的测试软件开展测试&测试软件交互面板见图(和图'%图(!系统管理软件主界面测试前&将经参数整定得到的控制器代入到实际系统中&通过软件依次输入位置给定值%图&#是在设定采样时间为#^#&T &转台速率为&#j -T 的情况下&依次输入'#j *&(#j*图'!软件参数设置界面"-#j *$.#j 共%个角度&得到角位置跟踪测试结果见图&#%图&#!主轴角位置跟踪测试结果速度跟踪测试结果见图&&&从图&&!H"可以看出&速度响应曲线能够快速平稳地上升到给定值处&上升时间为#^&"T &速度误差在7#^"!#^"!j -T "范围内&速率精度为&#^#*!j -T "%按照&#T 为间隔计算转速误差&连续进行%个周期的测量&将%次测量值计算均方差为速率平稳性误差为&#^#$!j -T"%均满足系统设计要求%图&&!主轴速度跟踪测试结果为了研究位置闭环的控制性能是否达到系统设计要求&!!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#&#(!#在控制速率不变的情况下&对%个测试角度分别开展.次测试%以'#j 为例&从图&"!H "可以看出&角位置响应曲线与理想曲线基本吻合&显示出系统的位置控制具有良好的跟踪性能%图!X"展示了在系统到达并维持给定位置值时的角度误差&角位置测量精度为7(^$&h %!j "&通过对角度控制重复误差求均方根得到该控制角度下的角位置重复精度为7(^$*h %!j"&与表&比照&均满足系统设计要求%图&"!给定值为'#j时主轴位置跟踪测试结果其它测试角度的结果与#j 转到'#j 时类似&经计算后均满足系统设计要求&不再赘述%F !结束语本文以自主研发的程控双轴姿态转台伺服控制系统为研究对象&采用基于位置环*速度环*电流环三闭环控制器的数字化设计&其中电流环和速度环采用;1控制&位置环采用比例加前馈控制的复合控制$利用`H X [64N I Z T=a 1交互式编程平台研发了转台控制软件&完成控制算法的软件实现$最后对转台开展实物验证&结果表明系统性能达到预期%但本文针对运动控制器的设计也有不足&只采用了传统控制策略&尤其在位置环控制器的设计上可以采用更为先进的控制方法&如模糊;1/控制*神经网络控制*滑膜变控制等&这也是系统需要改进的地方%整体来看&本系统满足程控双轴姿态转台高精度*高稳定性*高数字化设计要求%参考文献'&(王!健!高精度双轴光电转台运动控制系统的设计及应用'/(!南京)东南大学&"#&'!'"(林!森&于!宁!双轴转台运动控制系统',(!中国科技信息&"#&(!"%")'&'"!'$(袁海宵&王慧贞!基于无刷直流电动机伺服系统的位置环设计',(!电力电子技术&"#&&&%*!%")*"*%&(%!'%([b )M &[<@A,,&=b 1A >&E 8H K !1S 9K E S E 48H 86I 4I L 8Q O 48H X K ET E O V I3I 48O I KT U T 8E S X H T E NI 4L Q R R U T E K L W 8Q 464D ;1/',(!<N V H 43E N M H 8E O 6H K T]E T E H O 3G &"#&&)$($$'#!'*(?<0,&>?<@A [B &`1@A &M P!]E T E H O 3GI 4;1/3I 48O I KH K D I O 68G SI L_;4E 8Z I O 5X H T E NI 48Z I H C 6TN 6D 68H K 3I 48O I K 8Q O 4W 8H X K E '=(--"#F F FG 148E O 4H 86I 4H K=I 4L E O E 43EI 4=I S W 9Q 8E O H 4N 14L I O S H 86I 4:E 3G 4I K I D U &1F F F &"#&#)""$$W ""$(!'.(赵鑫昌!基于/J ;的机电执行器控制系统研制'/(!北京)北京工业大学&"#"#!'-(李世站!高精度二维转台控制方法研究'/(!西安)西安工业大学&"#&%!'((雷!巍!小型两轴光电转台控制系统设计与实现'/(!成都)电子科技大学&"#&*!''(卢志刚&吴!杰&吴!潮!数字伺服控制系统与设计'M (!北京)北京机械工业出版社&"##-!'&#(孙跃光&林怀蔚!数字;1/控制器参数的整定与仿真研究',(!科技创新导报&"#&"!&-")%*!'&&(>?0b +!]E K H 86I 4T G 69X E 8Z E E 4T 9H 3E W V E 38I OS I N Q K H 86I 4H 4N 8G O E E W 9G H T E3H O O 6E O W X H T E N ;[M )H3I S 9O E G E 4T 6V EH 4H K U T 6TK ',(!1F F F:O H 4T ^F K E 38O I 4^&"##"&%'!&")"-$'!'&"(王!刚!直流电机伺服控制技术研究与实现'/(!大连)大连理工大学&"#&$!'&$(董!恒&王!辉&黄科元!永磁同步电动机驱动系统数字;1调节器参数设计',(!电气传动&"##'&$'!&")-&#!'&%(王伟华&肖!曦!永磁同步电机高动态响应电流控制方法研究',(!中国电机工程学报&"#&$&$$!"&")&&-&"*!'&*(姜飞荣!永磁同步电机伺服控制系统研究'/(!杭州)浙江大学&"##.!'&.(王新华&刘金琨!微分器设计与应用'M (!北京)电子工业出版社&####################################################"#&#!!上接第**页"'"&(任!磊&韦!徵&龚春英&等!电力电子电路功率器件故障特征参数提取技术综述',(!中国电机工程学报&"#&*&$*!&"")$#('$&#&!'""(殷!实&谭国俊!一种基于卡尔曼滤波算法的MM =系统故障诊断策略',(!电工技术学报&"#&.&$&!&'")-%(%!'"$(王德成&林!辉!一种J aM 不平衡分类方法及在故障诊断中的应用',(!电机与控制学报&"#&"!'")%(*"!'"%(丁石川&厉雪衣&杭!俊&等!深度学习理论及在电机故障诊断中的研究现状与展望',(!电力系统保护与控制&"#"#&%(!(")&-"&(-!'"*(杨忠林&吴正国&李!辉!基于直流侧电流检测的逆变器开路故障诊断方法',(!中国电机工程学报&"##(&"(!"-")&(""!'".(汤天浩&孙今英&韩金刚!一种多电平逆变电路新的组合方式',(!电工技术学报&"##(&"$!$")%'**!'"-(吴国秋!基于自适应`J W J aM 的雷达:-]组件热管冷却故障诊断系统设计',(!计算机测量与控制&"#&'&"-!-")'-&##&&#.!!。
基于频谱响应的伺服转台控制系统设计及改进
基于频谱响应的伺服转台控制系统设计及改进伺服转台控制系统是一种用于实现转台运动控制的系统。
在实际应用中,伺服转台控制系统的设计和改进对于实现准确的转台运动控制非常重要。
基于频谱响应(Spectrum response)的伺服转台控制系统设计及改进,可以提高系统的性能和稳定性。
需要进行系统的建模和数学描述。
通过建立适当的数学模型,可以描述伺服转台控制系统的动态特性。
常见的数学模型包括线性控制模型和非线性控制模型。
线性控制模型一般适用于转台运动较小的情况,非线性控制模型适用于转台运动较大或复杂的情况。
通过对系统进行模型建立,可以更好地理解和分析系统的性能和特性。
需要进行系统的参数估计和识别。
伺服转台控制系统的参数估计和识别是基于频谱响应的控制系统设计的关键步骤。
通过对系统参数的估计和识别,可以确定系统的控制参数,以实现对转台运动的精确控制。
常见的参数估计和识别方法包括最小二乘法、系统辨识法等。
然后,需要进行系统的控制器设计。
控制器是伺服转台控制系统中的核心部件,主要用于对转台运动进行控制和调节。
常见的控制器设计方法包括比例积分微分(PID)控制器设计、模糊控制器设计、自适应控制器设计等。
通过合理选择和设计控制器,可以实现对伺服转台控制系统的精确控制和调节。
需要进行系统的性能评估和改进。
在设计完伺服转台控制系统之后,需要评估其性能和稳定性。
常见的性能评估指标包括超调量、稳态误差、响应时间等。
如果系统的性能不符合要求,需要进行系统的改进和优化。
常见的改进方法包括参数整定、系统结构优化等。
通过对系统的改进和优化,可以提高系统的性能和稳定性。
高精密伺服转台控制系统的设计
图 2 中, K v 为速度前馈系数, K a 为加速度前 2 实验结果与分析
馈系数。G 1 (s) 和 G 2 (s) 分别为位置调节器和电流调 节器的传递函数, Α为电流反馈系数, H (s) 为电机 传递函数[2 4 ]。
基 于 高 速 数 字 信 号 处 理 器 ( d ig ita l signa l p rocesso r, D SP ) 的运动控制器, 由于 D SP 具有独 立的数据存储器和指令存储器, 使得在控制单元内, 数据和指令可并行传输, 大大提高了数据处理速度, 可以实现各种复杂的控制算法, 从而大幅度提高采 用伺服电机驱动的高精密伺服转台的控制性能。
(清华大学 精密仪器与机械学系, 北京 100084)
摘 要: 该文设计并研制了高精密伺服转台的控制系统。该 控制系统采用圆光栅作为转台位移检测工具, 采用了数字位 置环和模拟电流环共同组成双闭环随动系统, 其中位置控制 器是带有速度前馈和加速度前馈的数字 P ID 伺服滤波器。 实验结果表明, 该转台运行 1. 148 h 过程中位置伺服精度在 ±1″范围内, 控制系统速度阶跃响应时间小于 50 m s; 运动 稳定, 速度变化范围小于±10% , 满足高精密伺服转台位置 伺服的精度要求。
转台及其控制系统结构如图 1 所示。
惯性导航系统在现代化技术中, 尤其是在国防 技术中, 占有非常重要的地位。而惯导测试设备是标 定、测试和检验惯性导航仪表或惯性导航系统的设
收稿日期: 2003210227 作者简介: 黄令龙 (19782) , 男 (汉) , 四川, 硕士研究生。 通讯联系人: 李庆祥, 教授, 博士生导师,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转台计算机伺服控制系统设计飞行仿真转台为高精度的复杂控制系统,是地面半实物仿真的关键设备,用以模拟飞行器在空中的各种动作和姿态,包括偏航、滚转和俯仰,实际上是一种电信号到机械运动的转换设备。
把高精度传感器如陀螺仪、导引头等安装于转台之上,将飞行器在空中的各种姿态的电信号转化为转台的三轴机械转动,以使陀螺仪、导引头等敏感飞机的姿态角运动。
“高频响、超低速、宽调速、高精度”成为仿真转台的主要性能指标和发展方向。
其中,“高频响”反映转台跟踪高频信号的能力强;“超低速”反映系统的低速平稳性好;“宽调速”可提供很宽的调速范围;“高精度”指系统跟踪指令信号的准确程度高。
1 转台系统介绍图1是国产某型号三轴转台,除外框为音叉式结构外,内、中框均为闭合式结构,三框可连续旋转,驱动均采用电动机。
被测陀螺安装于内框上,其输入输出电信号通过导电环从外框底座引出。
三框的物理定义是:内框代表滚转、中框代表俯仰、外框代表偏航,三框同时动作便可以模拟陀螺仪在三维空间的真实动作和姿态。
图1 三轴模拟转台及其示意图系统的驱动部分为:外框采用一个直流力矩电动机;中框采用两个电气并联同轴连接的直流力矩电动机;内框采用一个直流力矩电动机。
这些电动机由各自的脉冲调宽放大器(PWM)提供可控直流电源。
三框各有一个测速发电机和一个感应同步器,用以实时检测框架的旋转角速度和角位置。
不同用途的测试转台的对性能指标的要求也不同。
一般转台的主要技术指标包含:静态精度(达到千分之几度)、角速度范围(从千分之几度/秒到几百度/秒)、频率响应要求较宽,并具有一定的负载能力要求,且三个框架都具有最大速率的限制。
2 三轴测试转台的总体控制结构转台三个框架的控制是相互独立的,因此转台的控制系统可以采用如图2所示的原理方案。
该系统为上下位机结构的计算机控制系统。
以一台工控机作上位机,实现对伺服系统的监控、检测和管理。
上位机提供操作者的人机界面,实现对整个转台系统的在线检测、安全保护、性能检测和系统的运动管理以及数据处理。
下位机是直接控制机,完成三个通道的实时控制任务,采用一台工控机来实现。
各个通道的控制为并行关系,各个通道控制回路的物理结构相同。
图2三轴测试转台系统总体控制结构图系统的工作状态通过上位机的操作面板设置,工作状态信息在上位机显示。
上位机在接受输入设置命令后传送给下位机,上、下位机通过通信接口进行数据交换。
下位机快速采集测速机及数显表反馈信号,依据控制算法,实时解算出控制量,由D/A输出,经前置放大器和功放后控制电机,实现转台的实时控制。
转台是一种复杂的机电系统,存在诸如机械摩擦、电路参数的漂移、轴系间的力矩耦合、环境干扰,轴系间的不垂直度或不交度又将引起系统负载力矩的不平衡,台体刚度不足又会引起机械变形和负载的波动,电机本身还具有一种齿槽效应等非线性特性,因此,可以认为转台系统为一个具有很强非线性和不确定性的控制系统。
究其本质,飞行仿真转台是一个高精度位置/速度伺服系统。
对于驱动元件为电动机的转台系统,其本质又为一个电动机的位置或速度闭环系统。
3 转台单框的数学模型由于转台三个框架的控制是相互独立的,因此可以分别对每个框架的控制系统进行设计。
以下为转台单框的数学建模:d L f c a d J B T T k i tωω+++= (1) a a e a a a d d i u k R i L tω=++ (2) a m u k u = (3)d d tθω= (4) 其中, J 为转动惯量,包含负载和电机转子本身的转动惯量;ω为转子的机械角速度;B 为系统的粘性系数;L T 为负载的转矩;f T 为摩擦转矩;c k 为电动机的电磁转矩常数;a i 为电动机的电枢电流;a u 为电动机电枢两端电压;e k 为电动机的反电势系数;a R 为电枢电阻;a L 为电枢电感;m k 为PWM 功率放大器的放大倍数;u 为输入控制电压;θ为电动机的输出角位置。
对上述方程进行拉氏变换,记()t ω的拉氏变换为()s Ω,a ()u t 的拉氏变换为a ()U s ,注意到电枢电感a L 很小,通常将其略去。
由此推导得到电枢电压与输出角速度之间的传递函数为:c a a a c e m ()()1k s K U s R Js R B k k T s Ω==+++ (5) 其中,c a c e k K R B k k =+,a m a c eR J T R B k k =+分别为转台单框电动机的静态放大倍数和考虑粘性系数而忽略电感的情况之下的机电时间常数。
以上为在较理想的情况之下,对转台单框直流电动机的建模分析结果,对于系统精度要求不是很高的情况之下才可以采用此模型。
4 转台单框控制回路设计θ为框架参考转台单框系统的控制采用如图3所示的多环控制器结构,其中rθ为输出角位置信号。
角位置输入信号,c图3 转台控制系统框图实际的设计中,适当选择低频段和中频段参数,在保证系统稳态精度和稳定性的前提下,使系统具有良好的跟随性能,并加强对负载扰动的调节能力。
一般的设计过程是从内向外,依次设计电流环、速度环和位置环,根据系统整体的性能指标,适当分配相应的设计指标,按典型系统设计控制及补偿环节。
1)电流环设计引入电流环负反馈可以充分利用电机所允许的过载能力,同时限制电流的最大值,从而对电机起动或制动器起到快速的保护作用。
设计得到的电流环控制器直接在功放硬件电路中实现。
在电流环中引入适当的控制器,就可使电流环无静差地跟踪阶跃信号,有效减少电机回路的时间常数,为拉宽速度环频带、设计具有快速响应的速度环控制器打下良好的基础。
在电流环的具体设计中,常将功率放大器与电枢电流之间的关系用一个惯性环节来等效,参照仿真模型加入PI控制器,通过具体的实验验证设计结果。
一般要求设计后的电流环回路响应速度快、无超调或超调量很小。
2)速度环设计速度环是位置控制系统中非常重要的一个环节。
通常采用测速发电机作为速度反馈元件,构成模拟式速度反馈系统。
速度环的作用为:保证速度回路的稳态精度;在电机和框架的结构刚度不够大的情况下,尽量提高速度回路的刚度;为保证转台的快速性,尽可能拉宽速度回路的频带;为保证转台的平稳运转和抗噪声干扰,对高频段的谐振和未建模动态特性有较大的衰减;尽可能降低系统对扰动的灵敏度;减小速度环的死区电压。
采用模拟式速度反馈带来的好处是,一旦位置环控制发生故障,速度环仍然可保持系统的稳定,不至于发生“飞车”。
但是,速度环的刚度也不可太大,否则容易引起系统的机械振荡,并将影响系统的稳定性。
在进行速度环设计时,应当考虑以下两点:●速度环控制器应当包含一个积分环节,以克服伺服电机的死区和功率放大器漂移所造成的静态误差,保证稳态精度指标,提高系统静态刚度。
●将速度环的闭环特性设计为过阻尼,使其主导极点为一对实极点,从而有利于克服摩擦的影响,改善伺服电机低速运行特性。
u为为此,速度环调节器一般设计成PI控制器的形式,其结构如图4所示,nd电压量纲的速度指令,s u为转速反馈电压值。
图4模拟速度环3)位置环设计转台的位置闭环控制系统如图5所示。
在本位置环的设计中,将包括速度环调节器、脉冲调宽放大器(PWM)、力矩电动机、测速发电机和数显表在内的模拟电路部分统称为被控对象。
其中,数显表包括位置传感器和用以将模拟式位置信号转化为数字信号的A/D转换器。
位置环控制器为数字控制器,利用计算机来实现。
图5 三轴测试转台控制系统原理图位置环控制器的工作过程是:通过键盘或其他通信方式获取位置指令信号,通过位置传感器(数显表)获取系统当前输出的实际角位置,按照一定的算法计算出控制器的输出,经过D/A转换器输出控制量,使得系统的实际输出跟踪指令信号的变化。
当系统进行速度跟踪控制时,由于只能采集到精确的位置信号,没有精确的测速元件,故采用了将位置信号差分的方法来获取速度信号。
然后进行位置闭环控制,用位置环的精度来保证速度的精度。
从上述分析可以看出,无论是位置控制还是速度控制,转台的控制核心是位置环的控制算法,它是系统控制精度的保障。
适用于转台精密位置控制的方法有经典的PID、PID加前馈的复合控制,现代的自适应控制、变结构控制,智能的动态鲁棒补偿器控制、神经网络逆模型、神经网络并行控制、滑动模态控制等。
这里不深入讨论采用这些控制方法的设计过程。
5 控制系统软件设计由于转台是一个高精度的控制系统,因此,其上、下位机的采样周期都取为1ms。
考虑到转台控制系统的实时性要求较高,开发周期短,所以转台软件在DOS环境下进行开发。
1) 上位机软件需要实现的功能自检:按照一定的次序,自动检查转台各个部件的运行情况,确保状态正常。
转台回零:提供安全的回零手段,保证台体以稳定的低速精确回零。
工作状态设置:实现对转台框架和工作状态(位置/速度)的选择,对位置/速率值的设置。
数据处理:实现对系统各信号量的显示,对可能出现的数据传输错误的处理,模拟示波器对系统信号量的实时图形显示。
信号发生器:产生正弦、三角波、方波及随机信号供系统调试及工作检测使用。
通信:完成与下位机的通信,向下位机发出控制命令及从下位机得到系统当前的状态信息;完成对稳速转台控制系统的通信,发出相应的控制指令。
为提供良好的界面,软件中通过读写及显示位图文件实现Windows风格的图形界面,使用系统扩展内存技术实现1MB以上内存的访问和使用,并且不依赖汉字环境,在西文DOS下显示汉字。
上位机软件各项功能分别由对应软件界面中控制菜单:回零、设置、动态测试、静态测试、运行、演示、退出、自检等实现。
2) 下位机需要实现的功能实时控制:完成系统的数据采集、控制量解算以及系统当前状态监测等实时任务。
性能测试:作为可选模块,完成对最终系统频带的测试。
存储系统扫描结果,为绘制系统波特图提供信息。
数据处理:对系统各状态量进行采集、滤波。
通信:完成与上位机的通信,接受上位机控制命令,完成相应工作。
3) 上、下位机的通信设计上、下位机之间的通信利用NE2000兼容的以太网卡(实时通信速率可以达3ms),采用Netbios(Network basic input and output system)通信协议,实现上下位机毫秒级的实时数据传输。
Netbios是IBM公司在其网络适配器中采用的简单网络协议,位于OSI协议的传输层与应用层之间,提供类似于传输层的4类应用服务:命令支持、数据报支持、会话支持及其他通用命令。
考虑到转台控制系统中对通信实时性要求较高,传输层应用服务选用无连接的数据报服务和Client-Server机制,应用层采用简单停-等机制、累加和校验及错误重传策略。
在定义上、下位机通信协议时,尽可能减少数据帧长度。
实时工作段采用单向数据传输以减少传输量。