永磁同步电机双闭环矢量控制系统仿真实验指导书剖析
双闭环永磁同步电机矢量控制仿真研究
TECHNIQUE RESEARCH双闭环永磁同步电机矢量控制仿真研究Research on Vector Control Simulation of Double Closed Loop Permanent MagnetSynchronous Motor大连交通大学电气信息工程学院严航 (Yan Hang) 唐明新(Tang Mingxin) 聂启鹏(Nie Qipeng)永磁同步电机因其运行稳定、体积小、结构灵活等优点,在空调压缩机、电梯传动、船舶推进以及电动汽车领域都有着越来越广泛的应用。
在此根据永磁同步电机的结构,通过数学模型对永磁同步电机进行描述,并在Matlab/Simulink中搭建了一种用于汽车能量回收的矢量控制模型。
采用空间矢量脉宽调制技术和速度、电流双反馈的方式,控制永磁同步电机恒转速输出。
同时该双闭环永磁同步电机矢量控制能够在高性能电机驱动控制系统方面提供一定的指导意义。
关键词:永磁同步电机;矢量控制;电动汽车;MATLAB/Simulink软件Abstract: Permanent magnet synchronous motor (PMSM) is widely used in air-conditioning compressor, elevator drive, ship propulsion and electric vehicle because of its stable operation, small size and flexible structure. Accordi ng to the structure of permanent magnet synchronous motor, the permanent magnet synchronous motor is describ ed by mathematical model, and a vector control model for vehicle energy recovery is built in MATLAB/Simulink. The output of permanent magnet synchronous motor (PMSM) at constant speed is controlled by space vector pulse wi dth modulation (SVPWM) and double feedback of speed and current. At the same time, the vector control of doub le closed-loop permanent magnet synchronous motor can provide guidance for high performance motor drive con trol system.Key words: Permanent magnet synchronous motor; Vector control; Electric vehicle; MATLAB/Simulink software 【中图分类号】TM743【文献标识码】B 【文章编号】1561-0330(2019)05-0072-061 引言当今时代,全球气温变暖、生物多样性的锐减及雾霾的肆虐使得环境保护成为人们关注的大问题。
MATLABSIMULINK永磁同步电机矢量控制系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
《2024年永磁同步电机的矢量控制系统》范文
《永磁同步电机的矢量控制系统》篇一一、引言随着现代电力电子技术的不断发展,永磁同步电机(PMSM)已成为许多工业应用中首选的驱动系统。
由于PMSM的高效率、高精度和强适应性等特点,其在汽车、风电、工业机器人等领域的应用日益广泛。
为保证永磁同步电机的高性能和可靠性,一套优秀的控制系统尤为重要。
本文将深入探讨永磁同步电机的矢量控制系统,其重要性、工作原理以及在实际应用中的优势。
二、永磁同步电机的矢量控制系统1. 系统组成永磁同步电机的矢量控制系统主要由电源模块、功率转换模块、电机模块和控制系统模块四部分组成。
其中,控制系统模块是实现电机高效控制的核心,通过控制电流和电压等参数来调整电机的运行状态。
2. 工作原理矢量控制技术是一种先进的电机控制方法,其核心思想是将电机的电流分解为励磁分量和转矩分量,分别进行控制。
在永磁同步电机的矢量控制系统中,通过传感器获取电机的位置和速度信息,控制系统根据这些信息计算所需的电流值,并控制功率转换模块将直流电源转换为三相交流电源,以驱动电机运转。
3. 矢量控制策略在永磁同步电机的矢量控制系统中,常用的控制策略包括i-q 解耦控制和直接转矩控制等。
i-q解耦控制通过将电流分解为励磁分量和转矩分量,分别进行独立控制,实现电机的高效运行。
直接转矩控制则通过直接控制电机的电磁转矩,实现电机的高动态响应和快速性。
三、矢量控制系统的优势1. 高效率:通过精确控制电机的电流和电压等参数,实现电机的高效运行。
2. 高精度:通过实时调整电机的位置和速度等信息,提高电机的运动精度和定位精度。
3. 强适应性:针对不同的应用场景和需求,可以通过调整控制策略和参数设置来实现电机的高性能运行。
4. 易于维护:采用模块化设计,各部分独立运行,方便故障排查和维护。
四、实际应用中的优势案例分析以工业机器人为例,采用永磁同步电机的矢量控制系统可以大大提高机器人的工作效率和精度。
在机器人的关节运动中,矢量控制系统可以实时获取关节的位置和速度信息,并根据这些信息精确控制电机的电流和电压等参数,从而实现机器人的高精度运动和高效率工作。
永磁同步电机双闭环矢量控制系统仿真实验指导书剖析

题目1:永磁同步电机双闭环矢量控制系统仿真一.实验目的.加深理解永磁同步电机矢量控制系统的工作原理1.掌握永磁同步电机驱动系统仿真分析方法2二.实验要求:1.永磁同步电机双闭环控制系统建模2.电流控制器设计3.电流环动态跟随性能仿真实验4.转速控制器设计5.转速环抗负载扰动性能仿真实验6.给出仿真实验结果与理论分析结果的对比及结论三.预习内容注:以下所有找不到的器件均可以通过搜索框搜索Simulink的启动在MATLAB中键入>>Simulink,进入Simulink library,2014版本的可直接点击MATLAB界面上的Simulink library,在Simulink界面上选择File->New->Model。
如图1所示:图1 Simulink界面拖入空白文件作为转速)阶跃函数step(将source一级标题下点击Simulink在.给定,也可用两个ramp函数相减,使转速缓慢达到预定转速,如图2:图2 转速给定在Simulink一级标题下点击Ports & Subsystems 选择Subsystem放入空白文件并双击,删除In1和Out1的连线,如图3:图3 子函数模块选择Simulink>Continuous下的integrator、Simulink>discontinuous下的Saturation、Simulink>math operation下的gain和Add,连好线后保存并返回,作为PI调节器,其中saturation可设置上下限为100和-100,如图4:图4 PI子函数模块设置此PI调节器输出结果作为Iq的电流给定,同样方法得到一个PI调节器,输出结果作为电压给定,并设置saturation上下限为380和-380,Simulink下math operation选择sum双击并修改第二个“+”为“-”,如图5:图5 转速和电流反馈PI调节选择Simulink>Ports & Subsystems下的Subsystem 拖入并双击进入子系统,并添加2个In1和1个Out1如图6:图6 接口模块Simulink>math operation 下选择Trigonometric Function、Product、Subtract、Add 加入文件,设置好后保存并退出,作为逆Park变换,如图7:图7 反Park变换再生成一个PI调节器,作为d轴电流调节器,Simulink>source中选择constant 并设置为0,如图8:图8 静止坐标系电压生svpwm模块建立过程过于复杂,可参考文献[1][2],只列出总体框图如图9和图10,其中Ts为开关周期,Udc为直流母线电压。
《2024年永磁同步电机矢量控制系统的研究与设计》范文
《永磁同步电机矢量控制系统的研究与设计》篇一摘要:随着科技的发展和工业自动化水平的不断提高,永磁同步电机因其高效率、高精度和良好的控制性能被广泛应用于工业领域。
本文详细探讨了永磁同步电机矢量控制系统的基本原理,深入研究了其系统设计、实现过程及其在实际应用中的表现。
通过分析永磁同步电机的工作特性,我们提出了一种先进的矢量控制策略,以优化电机控制系统的性能。
一、引言永磁同步电机(PMSM)作为现代电机技术的代表,因其结构简单、高效和可靠性高等特点,在电动汽车、工业机器人等领域得到广泛应用。
为了满足高性能应用需求,开发高效的控制系统是关键。
本文研究的重点在于矢量控制系统的设计与优化,通过这种控制系统能够更精确地控制电机的工作状态和输出。
二、永磁同步电机的工作原理与特性永磁同步电机由定子和转子两部分组成,其工作原理基于电磁感应定律和安培环路定律。
转子上的永磁体产生恒定磁场,而通过调节定子电流产生的磁场与转子磁场同步,从而驱动电机转动。
PMSM具有高效率、高转矩/质量比和高速度等特点,且能在宽广的调速范围内运行。
三、矢量控制系统的基本原理与优势矢量控制技术是现代电机控制的核心技术之一。
它通过精确控制电机的电流和电压,实现对电机转矩的精确控制。
与传统的标量控制相比,矢量控制具有更高的控制精度和更好的动态响应性能。
在永磁同步电机中应用矢量控制技术可以大大提高电机的效率和输出转矩性能。
四、永磁同步电机矢量控制系统的设计与实现本节将详细描述矢量控制系统设计的各个环节,包括硬件设计、软件算法以及整体系统架构的设计。
在硬件设计部分,包括电机的选择、驱动器的设计以及传感器配置等;在软件算法部分,将详细介绍矢量控制的算法原理和实现过程;在整体系统架构设计部分,将讨论如何将硬件与软件相结合,形成一个高效稳定的控制系统。
五、系统性能分析与优化本节将通过实验数据和仿真结果来分析系统的性能表现,并针对可能存在的问题进行优化。
我们将通过对比优化前后的系统性能指标(如响应速度、稳态误差等),来验证优化措施的有效性。
【精品】永磁同步电机矢量控制仿真
永磁同步电动机矢量控制仿真1.前言随着微电子和电力电子技术的飞速发展,越来越多的交流伺服系统采用了数字信号处理器(DSP)和智能功率模块(IPM),从而实现了从模拟控制到数字控制的转变。
空间矢量PWM调制,它具有线性范围宽,高次谐波少,易于数字实现等优点,在新型的驱动器中得到了普遍应用。
永磁同步电机(PMSM)具有较高的运行效率、较高的转矩密度、转动惯量小、转矩脉动小、可高速运行等特点,在诸如高性能机床进给控制、位置控制、机器人等领域PMSM得到了广泛的应用。
近几年来,国内外学者将空间矢量脉宽调制算法应用于永磁同步电机控制中,并取得了一定的成就。
同时,永磁同步电机交流变频调速系统发展也很快,已成为调速系统的主要研究和发展对象。
数字仿真技术一直是交流调速系统分析计算的有用工具。
但随着对PMSM控制技术要求的提高,空间矢量PWM控制系统成为首选方案。
本文对其进行MATLABSIMULINK下仿真,并给出了仿真结果。
2.永磁同步电动机矢量控制原理矢量控制的目的是为了改善转矩控制性能,而最终实施仍然是落实到对定子电流(交流量)的控制上。
由于在定子侧的各个物理量,包括电压、电流、电动势、磁动势等等,都是交流量,其空间矢量在空间以同步转速旋转,调节、控制和计算都不是很方便。
因此,需要借助于坐标变换,使得各个物理量从静止坐标系转换到同步旋转坐标系,然后,站在同步旋转坐标系上进行观察,电动机的各个空间矢量都变成了静止矢量,在同步坐标系上的各个空间矢量就都变成了直流量,可以根据转矩公式的几种形式,找到转矩和被控矢量的各个分量之间的关系,实时的计算出转矩控制所需要的被控矢量的各个分量值,即直流给定量。
按照这些给定量进行实时控制,就可以达到直流电动机的控制性能。
由于这些直流给定量在物理上是不存在的,是虚构的,因此,还必须再经过坐标的逆变换过程,从旋转坐标系回到静止坐标系,把上述的直流给定量变换成实际的交流给定量,在三相定子坐标系上对交流量进行控制,使其实际值等于给定值。
永磁同步电机矢量控制系统仿真研究
总第329期2017年第3期计算机与数字工程Computer &• Digital EngineeringVol.45 No.3459永磁同步电机矢量控制系统仿真研究|郎宝华1康标1孙鲁艳2(1.西安工业大学电子信息工程学院西安710021) (2.西北工业集团有限公司西安710043)摘要矢量控制是永磁同步电机控制系统中非常重要的一种控制方式,通过分析永磁同步电机数学模型和矢量控 制原理的基础上,采用Matlab/Smulmk搭建永磁同步电机矢量控制系统的仿真模型,对PMSM矢量控制系统进行仿真和 实验分析,经过比较仿真结果和实验结果证明该仿真模型的有效性以及控制算法的正确性,为永磁同步电机控制系统设计 和调试提供了理论基础。
关键词永磁同步电机;矢量控制;Matlab/Simulink仿真中图分类号TP273 DOI:10. 3969/j. issa 1672-9722. 2017. 03. OilSimulation of PMSM Vector Control SystemLANG Baohua1KANG Biao1SUN Luyan2(1. School of Electronic Information Engineering,Xi’an Technological University,Xi’an 710021)(2. Northwest Industrial Group Co. , Ltd, Xi’an 710043)Abstract Vector control of permanent magnet synchronous motor control system is very important in a controlled manner, by analyzing the mathematical model and the permanent magnet synchronous motor vector control theory, Matlab/Simu- lation is used to build a simulation model of PMSM vector control system, PMSM vector control system is simulated and experimentally analyzed, by comparison simulation and experimental results demonstrate the validity of the simulation model and correctness of the control algorithm, a theoretical bosis is provided for permanent magnet synchronous motor control system design and commissioning.KeyWords PMSM, vector control, Matlab/Simulink simulationClass Number TP273i引言近些年来,随着电力电子技术及微电子技术的 快速发展,新型电机控制理论的不断涌现,稀土永 磁材料性能的大幅度提高和价格的降低,各种交流 7欠磁同步电动机伺服系统成为交流伺服系统的主 流。
双三相永磁同步电机双电机矢量控制剖析
双三相永磁同步电机矢量控制技术开题报告1. 课题来源及研究目的和意义多电机驱动系统作为运动控制研究领域的重要内容之一,广泛应用于地铁,机车牵引,挤压机组,机器人等应用场合。
而要推出性能优良的机车牵引,机器人等工业驱动以及综合电力舰船系统就需要解决同一直流母线电源和同一逆变器供电的多台电机独立运行问题[1]。
在过去的二十多年,越来越多的研究人员关注研究多相电机,因为多相电机相对于传统的三相电机存在诸多的显著优点,包括:减少转矩脉动,降低直流母线电流谐波含量,潜在的高效率,降低各相功率,由于较高的容错能力大大提高可靠性[2]。
最常见的一种多相电机是双三相电机[3],而双三相永磁同步电机是目前研究较为广泛的一种多相电机,与传统的三相电机相比,双三相电机将基波电流产生的最低次谐波磁势提高到了11次,消除了对电机性能影响最大的5次、7次谐波磁势,大大减少了电机的转矩脉动,提升了电机性能[4]。
所以我以双三相永磁同步电机为例来研究多相电机的多电机串联控制。
多相电机驱动控制策略中,最具影响力和代表性的是基于空间矢量解耦的矢量控制。
矢量控制方式的实质是将交流电动机等效为直流电动机,分别对速度,磁场两个分量进行独立控制。
通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
简单的说,空间矢量控制就是通过坐标变换将交流电机模型等效为直流电机,实现磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
所以对双三相永磁同步电机空间矢量控制技术的研究具有一定的研究意义。
2. 国内外双三相电机矢量控制技术的历史和现状1995年Yifan Zhao和T.A.Lipo等人从向量空间解耦的角度构造了相移30°双三相感应电机的变换矩阵[5]。
该方法通过适当的坐标变化,将自然坐标系下六维空间中的变量映像到新基下的六维空间,新的一组基形成三个相互正交的二维子空间,从而可以在每个子空间中分别进行控制,而且每一个子空间中的分量对应于电机变量中一定次数的谐波。
永磁同步电机矢量控制系统建模与仿真

第31卷 第6期2011年 11月河北大学学报(自然科学版)Journal of Hebei University(Natural Science Edition)Vol.31No.6Nov.2011永磁同步电机矢量控制系统建模与仿真王涛1,李勇2,王青1,贾克军1(1.河北大学质量技术监督学院,河北保定 071002;2.北京科技大学车辆工程研究所,北京 100083) 摘 要:基于永磁同步电机具有多变量、非线性的复杂特性,为研究需要,对其物理模型进行简化,建立了电机的数学模型及其基本方程.在矢量控制众多方法中采用最为简单的使直轴电流id=0方法进行研究,得到了基于转子磁场定向矢量控制下的电机电磁转矩方程.在Matlab/Simulink搭建整个系统仿真模型、转速和电流控制模块,并对这些模块进行仿真.仿真结果表明所得波形符合理论分析,系统响应快、超调量小,系统运行稳定,具有良好的动、静态特性.该模型的建立和分析对电机的实际控制提供了新的研究思路.关键词:永磁同步电机;矢量控制;建模;仿真中图分类号:TH 39 文献标志码:A 文章编号:1000-1565(2011)06-0648-05Modeling and Simulation Research on PMSM Vector Control SystemWANG Tao1,LI Yong2,WANG Qing1,JIA Ke-jun1(1.College of Quality and Technology Supervision,Hebei University,Baoding 071002China;2.Institute of Vehicle Engineering,Beijing University of Science and Technology,Beijing 100083,China)Abstract:Based on the complex system of Permanent Magnetic Synchronous Motor(PMSM)withmulti-variable and nonlinear,in this paper,the physical model of PMSM is simplified and the mathematicalmodel of the motor is established in order to facilitate research.This paper uses id=0control mannerwhich is the simplest manner in vector control methods,motor electromagnetic torque equation is estab-lished based on rotor field oriented vector control.The system model,speed and current control block arebuilt and simulated with Matlab/Simulink.Simulation results show that the waveform is consistent withtheoretical analysis;the model has fast response and small overshoot.The system runs stably with gooddynamic and static characteristics.So,the establishment and analysis of PMSM model provide a new studyfor its actual control.Key words:permanent magnetic synchronous motor;vector control;modeling;simulation永磁同步电机与励磁同步电机相比取消了励磁电源和励磁绕组,取而代之的是能够产生稳定磁场的永磁体,这就使得永磁同步电机结构更加紧凑,重量减轻,体积减小,又由于同时也取消了励磁系统的损耗, 收稿日期:2011-06-11 基金项目:河北省教育厅高等学校科学技术研究青年基金项目(2011206);2011年河北大学自然科学研究计划项目;校企横向课题项目(2011-3) 第一作者:王涛(1982-),男,山东泰安人,河北大学讲师,博士,主要从事新能源电动汽车研发技术. 通信作者:李勇(1986-),男,山东菏泽人,北京科技大学在读博士,主要从事交流传动控制系统、故障诊断方向的研究.E-mail:liyongthinkpad@gmail.com第6期王涛,等:永磁同步电机矢量控制系统建模与仿真其效率、功率因数得到了很大的提高[1-2].永磁同步电机的励磁磁场由转子上的永磁体产生,按转子磁场定向的矢量控制实现类似于直流电机对转矩和转子磁链的分别控制,从而获得类似于直流电机的宽范围调速性能.随着电力电子技术和控制技术的发展,永磁同步电机具有精度高、动态性能好、调速范围大以及定位控制准确等优点,常被应用于伺服系统和高性能的调速系统,因此引起了国内外越来越多学者的广泛关注[3].本文对永磁同步电机建立数学模型得到其基本方程,对矢量控制众多控制方法中最为简单的id=0方法进行研究,在Matlab/Simulink平台下建立该控制方法的仿真模型并进行仿真,并对仿真结果进行分析.该模型的建立和分析对电机的实际控制提供了新的研究思路.1 永磁同步电机的数学模型1.1 永磁同步电机基本结构永磁同步电机的定子与一般交流电机的定子绕组相同,采用三相交流绕组.定子铁心由带有齿和槽的冲片叠成,在槽中嵌入交流绕组.当三相对称电流通入三相对称绕组时,在气隙中产生同步旋转磁场,为简化问题同时又不影响数学模型的精度,常作如下假设:1)气隙磁场即永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场呈正弦分布,定子三相绕组磁通产生的感应电动势也呈正弦分布;2)由于永磁同步电机的气隙比较大,所以不计定子磁路的饱和和铁损;3)转子上没有阻尼绕组,永磁体没有阻尼作用[4-5].1.2 永磁同步电机基本方程将永磁同步电机模型建立在三相静止坐标系(abc坐标系)上,可得到其各绕组电压平衡方程[6-7]uaubu熿燀燄燅c=Rs+ddtLa ddtMab ddtMcaddtMab Rs+ddtLb ddtMbcddtMca ddtMbc Rs+ddtL熿燀燄燅ciaibi熿燀燄燅c+eaebe熿燀燄燅c,(1)式中,ea,eb,ec为永磁体磁场在a,b,c三相电枢绕组中感应的旋转电动势,Rs为定子绕组电阻,La,Lb,Lc为定子绕组自感,Mab,Mbc,Mca为绕组间的互感.由于转子结构不对称,将abc坐标系(三相静止坐标系)中的a,b,c三相绕组先变换到αβ坐标系(两相静止坐标系),然后再由αβ坐标系变换到dq坐标系(两相旋转坐标系)中.采用的坐标变换关系式为[8-11]idi[]q=cosθ cosθ-2π()3 cosθ+2π()3-sinθ -sinθ-2π()3 -sinθ+2π()熿燀燄燅3iaibi熿燀燄燅c,(2)得到dq坐标系上的电压方程为udu[]q=Rs+ddtLd -ωLq-ωLd Rs+ddtL熿燀燄燅qidi[]q+0ωrψ[]f,(3)式中,Ld,Lq为定子绕组自感,id,iq为d,q轴电流分量,Rs为定子绕组电阻,ud,uq为d,q轴电压分量,ωr为转子角速度,ψf=槡6ψfm/2,ψfm为与定子a,b,c三相绕组交链的永磁体磁链的幅值.电机在dq坐标系中转矩方程为Te=32p(ψdiq-ψqid),(4)dq向abc转换关系如式(5)所示.·946·河北大学学报(自然科学版)2011年iaibi熿燀燄燅c=槡23 cosθ -sinθcosθ-2π()3 -sinθ-2π()3cosθ+2π()3 -sinθ+2π()熿燀燄燅3idi[]q.(5)永磁同步电机的矢量控制方法有很多种,其中使直轴电流id=0控制是最常用的方法.此时电流矢量随负载状态的变化在q轴上移动.根据式(4),id=0时的电磁转矩为Te=32pψdiq.采用该方法消除了直轴电流带来的电枢反应,电机所有电流都用来产生电磁转矩,电流控制效率得到提高,产生最大的电磁转矩.永磁同步电机矢量控制结构图1所示.图1 永磁同步电机矢量控制结构Fig.1 PMSM vector control structure2 Simulink仿真模型根据永磁同步电机矢量控制结构图[12-15],在Matlab/Simulink中搭建仿真模型,如图2所示.图2 永磁同步电机仿真模型Fig.2 PMSM simulation mode本文采用永磁同步电机电流、速度的双闭环控制,如图3所示.内环为电流环,外环为速度环.·056·第6期王涛,等:永磁同步电机矢量控制系统建模与仿真图3 永磁同步电机电流、转速控制系统结构Fig.3 PMSM speed &current control system structure将电流环看作是速度调节系统中的一个环节,其作用是提高系统的快速性,抑制电流环内部干扰,限制最大电流以保障系统安全运行,速度环的作用是增强系统抗负载扰动的能力,抑制速度波动[16].转速调节模块如图4所示.该模块由PI调节器和限幅输出模块组成.通过反复调整kp,ki参数使系统输出达到最佳状态.电流调节其实就是转矩调节模块,将转速调节器的输出电流作为转矩调节器的输入.该模块也由PI调节器和限幅输出模块组成,电流调节模型图与转速调节模型图相同[17-18].图4 永磁同步电机转速调节器仿真模型Fig.4 PMSM ASR simulation model3 仿真和结果分析仿真参数设置:逆变器直流电源电压380V,永磁同步电机定子绕组电阻Rs=2.67Ω,d轴电感Ld=0.007H,q轴电感Lq=0.007H,极对数p=2,电机转动惯量J=0.006kg·m2.电机空载启动,启动转速给定n=3 000r/min;待系统进入稳态后在0.05s时突加Tl=6N·m的负载,仿真时间t=0.1s.仿真结果如图5a-c所示.从图5a中可以看出电机在启动后的0.02s内转速快速上升,并在经过0.01s的波动之后迅速达到稳定状态,电机动态响应性能良好.图5b中看出0.03s之前出现很大的振荡,这是因为电机启动初期转子转速低于定子旋转磁场转速,定子磁链和永磁体磁链产生的转矩在较短的时间内起到制动作用.当牵引转矩小于制动转矩时,电机总转矩下降,从而出现振荡现象.在0.05s突加6N·m的负载时,转速、转矩均有相应响应,但经过短暂的波动之后均达到稳定状态.由于仿真过程中使用PWM逆变器供电,定子电流中出现一定的谐波分量,影响到电磁转矩,使转矩和转速均出现一定的脉动,但不影响系统的稳定性.图5c为电机的机械特性曲线,可以看出机械特性较为理想.a.转速响应曲线;b.转矩响应曲线;c.机械特性曲线.图5 永磁同步电机转速、扭矩及机械特性曲线Fig.5 Curve of the PMSM speed response、torque response and mechanical characteristic·156·河北大学学报(自然科学版)2011年4 结论在分析永磁同步电机数学模型的基础之上,建立了电机的数学方程,通过数学的方法去研究永磁同步电机,并在Matlab/Simulink里搭建模型并进行仿真.由电机仿真波形可以看出,系统响应快速且平稳,转速和转矩超调量非常小,系统起动后保持恒定转矩;突加扰动时系统波动较小,充分说明系统具有较好的鲁棒性.仿真结果证明了本文所提出的永磁同步电机仿真建模方法的有效性.参 考 文 献:[1]曾毅.变频调速控制系统的设计和维护[M].2版.济南:山东科学技术出版社,2002.[2]张铁军.永磁同步电机数字化控制系统研究[D].长沙:湖南大学,2006.[3]王成元.电机现代控制技术[M].北京:机械工业出版社,2007.[4]杨文峰,孙韶元.参数自调整模糊控制交流调速系统的研究[J].电工技术杂志,2001(9):11-13.[5]BARRERO F,GONZ LEZ A,TORRALBA A,et al.Speed control of induction motors using a novel fuzzy sliding modestructure[J].IEEE Transactions on Fuzzy Systems,2002,10(3):375-380.[6]薛峰,谢运祥,吴捷.直接转矩控制系统的转速估算模型及其参数补偿方法[J].电工技术学报,1998,13(5):26-30.[7]EBERHART R,KENNEDY J.A new optimizer using particl swarm theory[Z].Proceedings of Sixth International Sym-posium MicroMachine and Human Science,Nagoya,Japan,1995.[8]陈伯时.电力拖动自动控制系统[M].2版.北京:机械工业出版社,2001.[9]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.[10]黄永安,马路,刘慧敏.MATLAB 7.1/Simulink 6.1建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.[11]李学文,李学军.基于SIMULINK的永磁同步电机建模与仿真[J].河北大学学报:自然科学版,2007,27(S1):28-31.[12]BOUCHIKER S,CAPOLINO G A.Vector control of a permanent magnet synchronous motor using AC matrix converter[J].IEEE Transactions on Power Electronics,1998,13(6):1089-1099.[13]沈艳霞,吴定会,李三东.永磁同步电机位置跟踪控制器及Backstepping方法建模[J].系统仿真学报,2005,17(6):1318-1321.[14]薛花,姜建国.基于EKF永磁同步电机FMRC方法的仿真研究[J].系统仿真学报,2006,18(11):3324-3327.[15]林伟杰.永磁同步电机两种磁场定向控制策略的比较[J].电力电子技术,2007,41(1):26-29.[16]LI Yong,MA Fei,CHEN Shunxin,et al.PMSM simuation for AC drive in mining dump truck[Z].The Ninth Interna-tional Conference on Information and Management Sciences(IMS2010),Urumchi,2010.[17]KENNEDY J,EBERHART R.Particle swarm optimization[Z].Pro IEEE Int Conf on Neural Networks,Perth,1995.[18]钱昊,赵荣祥.永磁同步电机矢量控制系统[J].农机化研究,2006(2):90-91.(责任编辑:孟素兰)·256·。
永磁同步电机矢量控制系统仿真研究

永磁同步电机矢量控制系统仿真研究摘要:随着电力电子、电机制造技术以及新型材料的飞速发展,交流调速理论以及新型控制理论研究的不断深入,永磁交流调速系统在机电一体化、机器人、柔性制造系统等高科技领域中占据了日益重要的地位。
永磁同步电动机具有能量转换效率高、体积小,运行可靠性高、调速范围广,动、静特性好等优点,这使得永磁同步电动机技术得到了迅速发展。
PWM控制技术从最早追求电压波形正弦,到电流波形正弦,再到磁通正弦,得到了不断创新和完善。
本文是在此基础上,参照了众多学者的研究,对永磁同步电机进行了矢量控制的研究,并通过建立仿真模型,对矢量控制下永磁同步电机进行仿真,并对结果进行分析。
关键词:永磁交流调速,PWM控制技术,永磁同步电动机1 PMSM数学模型介绍精确的电机数学模型是电机控制理论得以研究与实现的基础,因此首先给出三相永磁同步电动机数学模型。
推导前作如下假设:1)定子三相绕组对称,Y型连接;2)反电动势正弦;3)铁磁部分磁路线性,即不计饱和、剩磁、涡流、磁滞损耗等影响;4)转子无阻尼绕组,永磁体没有阻尼作用;PMSM在a-b-c坐标系统中电压方程用矩阵形式表示为:(1)其中定子电枢相电阻;、、定子绕组端电压瞬时值;、、定子绕组相电流瞬时值;、、磁链瞬时值;微分算子,。
PMSM定子绕组电感系数是转子位置角的函数,其电压方程、磁链方程都是含有时变系数的微分方程组,在分析PMSM工作过程时用解析法求解时变系数方程组是比较困难的,需要采取数值法求解,不便于工业控制应用。
因此采用park变换矩阵,将PMSM数学模型变换到固定在其转子上的两相旋转坐标系d-q坐标系中,将上述含时变系数的微分方程组变换为易于求解的常系数微分方程组,这对于分析PMSM动态过程和稳态过程都是十分有意义的。
从而得到建立在dq旋转坐标中和三相静止坐标中电机模型之间具有如下关系:(2)(3)PMSM中定子绕组一般为无中线的Y型连接,固。
永磁同步电机矢量控制仿真实验总结
永磁同步电机矢量控制实验总结矢量控制是交流电机的一种高性能控制技术,最早由德国学者Blaschke 提出。
其基本思想是根据坐标变换理论将交流电机两个在时间相位上正交的交流分量转换为空间上正交的两个直流分量,从而把交流电机定子电流分解成励磁分量和转矩分量两个独立的直流控制量,分别实现对电机磁通和转矩的控制,然后再通过坐标变换将两个独立的直流控制量还原为交流时变量来控制交流电机,大大提高了调速的动态性能。
随着新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机(PMSM )成为近年来发展较快的一种电机。
它具有气隙磁密度高、转矩脉动小、转矩/ 惯量比大的优点,与传统的异步电机相比,节能效果明显、效率高、结构轻型化、维护容易、运行稳定、可靠性高、输出转矩大,得到了越来越广泛的应用和重视,是目前交流伺服系统中的主流电机。
1 永磁同步电机的数学模型永磁同步电机模块可工作于电动机方式或发电机方式,运行方式由电机电磁转矩符号决定(为正则是电动机状态,为负则是发电机状态)。
对永磁同步电机模型作如下假设:不考虑铁心饱和,忽略端部效应;涡流损耗、磁滞损耗忽略不计;定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状,忽略磁场的高次谐波;不考虑转子磁场的突极效应;永磁材料的电导率为零,永磁体的磁场恒定不变。
运用坐标变换理论,可以得到在同步旋转的两相坐标系下(d-q )的永磁同步电机的数学模型。
电压方程为:q d d d P Ri u ωψψ-+=d q q q P Ri u ωψψ-+=定子磁链方程为:f d d d i L ψψ+=q q q i L =ψ电磁转矩方程为:)(q d d q p e i i n T ψψ-=式中:d u 、q u 、d i 、q i 、d ψ、q ψ分别为d-q 轴上的定子电压、电流和磁链分量;R 为电机定子绕组电阻;d L 和q L 分别为永磁同步电机d-q 轴上的电感;f ψ为永磁体在定子上产生的耦合磁链;ω 为d-q 坐标系的旋转角频率;e T 为电机电磁转矩;p n 为磁极对数;p 为微分算子。
永磁同步电机转速电流双闭环控制系统研究
永磁同步电机转速电流双闭环控制系统研究0 引言随着永磁材料和控制技术的发展,永磁同步电机得到了广泛的应用。
建立永磁同步电机控制系统的仿真模型,对验证各种控制算法,优化整个控制系统具有十分重要的意义。
本文运用模块化的思想,借助Simulink的仿真建模,将整个控制系统分成几个独立的模块:坐标变换模块、本体模块、SVPWM矢量调制模块和电压逆变模块。
并对这些模块进行有机整合,搭建出控制系统的仿真模型。
1 坐标变换模块:坐标变换模块的目的是将同步电机的定子相电流变换到与i1、i2同步的旋转坐标系中。
与参考输入相比较,得到的偏差作为电流调节器(PI)的输入。
2 SVPWM调制模块:空间电压矢量脉宽调制技术(SVPWM),以三相正弦波电压供电时交流电机的理想磁通轨迹为基准,用逆变器的8 种开关模式产生的实际磁通去逼近基准磁通圆,使电机获得幅值恒定的圆形磁场(正弦磁通),从而达到较高的控制性能。
SVPWM 方法通过8 个基本空间矢量中两个相邻的有效矢量及零矢量,并根据各自作用时间不同来等效电机所需的空间电压矢量。
3 Universal Bridge(电压逆变模块)模型:逆变器对BLDC来说,首先是功率变换装置,也就是电子换向器,每一个桥臂上的一个功率器件相当于直流电动机的一个机械换向器,还同时兼有PWM电流调节器功能。
对逆变器的建模,采用Simulink的SimPowerSystem工具箱提供的三相全桥IGBT模块。
由于在Matlab中SimPowerSystem工具箱和Simulink 工具箱不是随便可以相连的,中间必须加上受控电压源(或者受控电压源、电压表、电流表)。
逆变器根据电流控制模块所控制PWM信号,顺序导通和关断,产生方波电流输出。
4 永磁电机本体模块:该模块完成转子角速度、转子位置角和电磁转矩的计算,将0到无穷的角度转换成-180到180度的角。
然后通过角度选择确定转角作用的有效角度。
6 仿真结果:对搭建的基于PMSM 控制系统模型进行仿真试验。
永磁同步电机双滑模无传感器矢量控制初探

永磁同步电机双滑模无传感器矢量控制初探摘要本文主要针对同步电机双滑模无传感器矢量控制技术进行分析,文章提出了双滑模无传感器矢量控制方法。
该方法建立于永磁同步电机数学闭环模型之上,并且引入正切函数完成滑模控制器控制,替代传统的开关函数,也能够有效控制整个系统的高频振动频次。
另外,双滑模无传感器矢量控制方法摒弃传统PI速度外环,增强了系统抗干扰性能。
与传统的PI控制相比,提出的双滑模无传感器矢量控制动态性能更优,具有更高的跟踪精度,使电机在运行过程始终保持良好的估算性能。
关键词:永磁同步电机;双滑模速度控制器;双曲正切函数永磁同步电机是具有全面优势的电机设备,该电机的抗过载能力更高、电机应用安全稳定,转矩比以及功率密度也比传统电机更有优势。
因此,永磁同步电机在现代社会生产中应用逐渐广泛。
永磁同步电机在应用过程中,最初控制方式是利用传感器采集电机转速和转子信息,继而完成PMSM控制。
但是,该控制方法在实际的应用过程中,容易受到外部环境因素影响,控制系统的稳定性存在不同。
而本文在分析文献和实践研究之后,提出了双滑模无传感器矢量控制方法,该方法是利用控制算法取代传统传感器数据获取,继而减少传感器受到的外部影响,实现高精度矢量控制。
1.双滑模无传感器矢量控制方法研究现状探讨研究双滑模无传感器矢量控制方法,主要目的是进一步提升永磁同步电机的控制精度,解决传统传感器数据获取的偏差问题。
如,专家在研究无传感器矢量控制方法的过程中,主要是以自适应观测器为基础开展讨论。
在控制系统中应用滤波器观测设备、滑模观测设备等实现控制优化。
另外,进一步研究发现,采用Sigmoid函数替代原有的开关函数是实现控制的主要方法,能够控制系统的抖振频率、估算误差,继而实现控制方法优化。
通过上述研究分析,本文提出双滑模无传感器矢量控制方法。
该方法应用将滑模控制器取代原有的传统滑模观测器,也利用无传感器控制替代PI控制模块。
整个闭环控制时,为了减少不必要因素干扰,主要设计应用双曲正切函数,提升转子位置获取精度,继而实现矢量控制。
【精选】基于Matlab永磁同步电机矢量控制的仿真分析 doc资料
基于Matlab永磁同步电机矢量控制的仿真分析《工业控制计算机》2021年第24卷第9期本文应用Matlab 强大的建模和仿真能力,在Matlab /Simulink 中搭建PMSM 矢量控制系统的仿真模型,这为PMSM伺服控制系统的分析与设计提供了有效的手段和工具。
1PMSM 的数学模型以及矢量控制原理1.1PMSM 的数学模型为了便于分析,电机的数学模型推导前作如下假设:①忽略铁心饱和、涡流和磁滞损耗;②永磁转子没有阻尼作用;③三相定子绕组在空间呈星形对称分布,定子各绕组的电枢电阻和电感相等;④感应电动势及气隙磁场均按正弦分布,且不计磁场的各项谐波。
则电机三相绕组的电压回路方程如下:u au b u c=r 000r 000M M r i ai b i c+p L M M M L M M M M MLi ai b i c+p φf sin (θr φf sin (θr -2π3φf sin (θr +2π3(1其中:u a 、u b 、u c 分别为三相定子绕组电压;i a 、i b 、i c 分别为三相定子绕组电流;r 每相定子绕组电阻;φf 转子永磁体磁链;L 每相绕组的自感;M 每相绕组的互感;θr 转子位置角,即转子q 轴与a 相轴线的夹角;p 微分算子,p=d /dt 。
因为三相绕组为星形连接,有i a +i b +i c =0(2将(2代入(1中,则可得到PMSM 在abc 静止坐标系的电压方程:u a u b u c MM =r+p (L-M000r+p (L-M00r+p (L-M MMi a i b i cMM+pφfsin (θrφfsin (θr-2πφfsin (θr +2π3(3利用clark 和park 变换,先将三相abc 静止坐标系变换到两相αβ静止坐标系,再变换到两相dq 旋转坐标系,得到相应的动态磁链以及电压方程:φd =L d i d +φf φq =L q i qM (4u d =ri d +L d pi d -ωr φq u q =ri q +L q pi q +ωr φdM(5其中:ωr 为转子电角速度,有θr =ωr t ;电机是表面式PMSM ,所以L d =L q =L-M ,分别为直、交轴同步电感;u d ,u q ,i d ,i q ,φd ,φq 分别为直、交轴上的电压、电流和磁链分量。
永磁同步电动机两种矢量控制方式的仿真研究
2 转子磁场定向下的永磁同步电动机数学模型
永磁同步电动机是交流同步调速系统的主要环节,分 析其数学模型对把握其调速特性尤为重要。取转子永磁体基 波励磁磁场轴线为 d 轴,q 轴顺着旋转方向超前 d 轴 90 度 电角度,dq 轴系随同转子以电角度ωr 一道旋转,它的空间 坐标以 d 轴与参考轴 as 间的电角度θr 来表示,则理想永磁
通过 MATLAB 语言中的 Simulink 和 Power System Block 模块建立了控制系统的仿真模型,并将
得出的仿真结果进行了分析比较。
关键词: 永磁同步电机; 矢量控制; 仿真
中图分类号:TP391.9
文献标识码: A
Simulation of Permanent Magnet Synchronous Motor Using Two Vector Control Methods
PMSM 测量
图 5 转子磁场定向前馈型矢量控制电路仿真
4.3 永磁同步电机反馈型矢量控制
反馈型矢量控制又名直接型矢量控制,这类控制系统 也有多种组成方案,图 6 仅是其中一种方案的 MATLAB 仿真模型。图中最关键的部分是磁通运算器,用 simulink 建立了磁通运算器模块如图 7 所示。根据永磁同步电机在 同步旋转 d,q,0 坐标系中的电压方程,将检测到得两相定 子电流和电压用于计算磁链参数,于是可以得到 d,q,0 坐 标系的磁链ψ d 和ψ q ,经过矢量合成可以得到全交链磁通
GU Guang-xu, DENG Zhi-quan
(Department of Electrical Engineering, Yancheng Institute of Technology, Yancheng 224003, China)
《2024年永磁同步电机的矢量控制系统》范文

《永磁同步电机的矢量控制系统》篇一一、引言随着电力电子技术的飞速发展,永磁同步电机(PMSM)在工业、交通、能源等领域得到了广泛应用。
为了实现PMSM的高效、稳定运行,其控制系统的设计显得尤为重要。
其中,矢量控制系统以其高精度、高动态性能的特点,成为了PMSM控制系统的主流方案。
本文将详细介绍永磁同步电机的矢量控制系统,分析其原理、设计及实施过程,并探讨其在实际应用中的优势与挑战。
二、永磁同步电机矢量控制系统的原理永磁同步电机矢量控制系统是一种基于磁场定向控制的电机驱动技术。
它通过精确控制电机的电流分量,实现对电机转矩的精确控制。
该系统主要由控制器、驱动器、逆变器等部分组成。
其中,控制器负责根据电机的运行状态和目标值,计算出所需的电流分量;驱动器则将控制器的输出信号转换为适合逆变器工作的驱动信号;逆变器则根据驱动信号,将直流电源转换为交流电源,驱动电机运行。
三、永磁同步电机矢量控制系统的设计1. 控制器设计:控制器是矢量控制系统的核心部分,其性能直接影响到整个系统的控制效果。
控制器设计主要包括参数计算和算法实现两部分。
参数计算需要根据电机的实际运行状态和目标值,计算出所需的电流分量。
算法实现则需要采用先进的控制算法,如空间矢量脉宽调制(SVPWM)等,以实现对电机的高效、精确控制。
2. 驱动器设计:驱动器负责将控制器的输出信号转换为适合逆变器工作的驱动信号。
在设计过程中,需要考虑到驱动器的响应速度、抗干扰能力等因素,以确保系统稳定、可靠地运行。
3. 逆变器设计:逆变器是矢量控制系统的执行部分,其性能直接影响到电机的运行效果。
逆变器设计需要考虑电压、电流等参数的匹配问题,以及降低损耗、提高效率等因素。
同时,为了实现电机的高效、精确控制,还需要采用合适的拓扑结构和调制策略。
四、永磁同步电机矢量控制系统的实施过程1. 参数辨识:首先需要对电机进行参数辨识,包括电机的电阻、电感、永磁体磁链等参数。
这些参数对于后续的控制器设计和算法实现至关重要。
基于Matlab永磁同步电机矢量控制的仿真分析
Smuik环 境 中搭 建 了 电 流和 速 度 双 闭 环控 制仿 真模 型 , 真 结 果 也证 明 了该 系统模 型 的有 效 性 , 证 了所 采 用 的 控 制 算 i l n 仿 验
法 , 在 实际 控 制 系统 设计 和 调 试 运 行 提 供 了充 分 的 理 论依 据 。 为
Si ik. e si ua i r ut ov d he fe t t te y tm mod a d erid t onr l a{ lt mul Th m lt n on es l pr e t e c i y of h s se S s vi el n v ie i c to c cua i wayan i l f s on , d t — a
S rv e u ie t h oei l a i frd s n g a d a js n n p a t a c nrl y tm. O po i d S f i e r c s o e i i n du t g i rci l o t se d c nt ta b s g n i c o s
K y r sP M, V W M, d l g co e - o p s lt n e wo d : MS S P mo ei , ls d lo ,i a i n mu o
本 文 应 用 Mal 强 大 的 建 模 和 仿 真 能 力 , 在 Malb tb a t / a Smuik中 搭 建 P M 矢 量 控 制 系统 的仿 真模 型 , 为 P M i l n MS 这 MS 伺 服控 制 系统 的分 析 与 设 计 提 供 了 有 效 的 手段 和工 具 。
mo eig d l me h d T c n r l o p whc a e h in r u r n —o p n t e ue s e d-o p r u e I n t o ,wo o t lo s o ih r t e n e c r t l a d h o tr p e lo a e s d n e o Ma lb t / a
永磁同步电机矢量控制系统设计分析
Internal Combustion Engine & Parts• 39•永磁同步电机矢量控制系统设计分析张健(江苏安全技术职业学院,徐州221011)摘要:永磁同步电机(PMSM)控制系统的核心控制途径为矢量控制,本课题对永磁同步电机矢量控制原理、数学模型进行了研究,并借助运用MATLAB/Simulink,针对永磁同步电机矢量控制系统开展仿真模型研究,运用仿真实验分析法探究永磁同步电机矢量控制系统,对实验及仿真结果进行对照研究,证实该控制算法比较科学,且仿真模型相对有效,为调试、设计控制系统奠定了坚实的基石出。
关键词:永磁同步电机;矢量控制系统;仿真模型0引言转矩系数大、功率密度大及结构单一是永磁同步电机最显著的特点,在稳定性较强、精度较高的领域有着普遍应用。
同步进电机、直流电机相比,永磁同步电机具有明显的优势,在伺服系统中占据着主导地位。
在原直流电机中,由于电刷、机械转向器会影响适用、可靠性能,而在基于相同体积下,永磁同步电机的直流电机要低于交流电机的输出功率,约为10%到60%。
结合国内的国情来看,我国作为主要的稀土生产国家,稀土资源种类丰富且总量较多,借此优势可以对不同类型的永磁电机进行设计,大规模的运用稀土永磁电机,推动社会经济的进步。
要想在实践中大规模的运用永磁同 步电机,必须要确保其控制系统具有良好的可靠性和稳定 性。
本研究联合运用两种不同的控制方式,包括:转速和电 流双闭环控制法、转子磁场定向矢量控制法(励磁电流id 为零),借助MATLAB/Simulink仿真实验,体现出这种控制 法的动态性能较强,且具有较强的合理性。
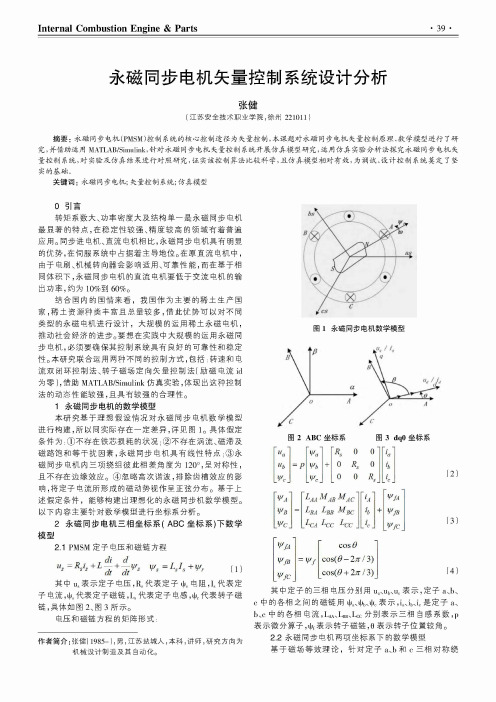
1永磁同步电机的数学模型本研究基于理想假设情况对永磁同步电机数学模型 进行构建,所以同实际存在一定差异,详见图1。
具体假定 条件为:①不存在铁芯损耗的状况;②不存在涡流、磁滞及 磁路饱和等干扰因素,永磁同步电机具有线性特点;③永 磁同步电机内三项绕组彼此相差角度为120。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目1:永磁同步电机双闭环矢量控制系统仿真
一.实验目的
1.加深理解永磁同步电机矢量控制系统的工作原理
2.掌握永磁同步电机驱动系统仿真分析方法
二.实验要求:
1.永磁同步电机双闭环控制系统建模
2.电流控制器设计
3.电流环动态跟随性能仿真实验
4.转速控制器设计
5.转速环抗负载扰动性能仿真实验
6.给出仿真实验结果与理论分析结果的对比及结论
三.预习内容
注:以下所有找不到的器件均可以通过搜索框搜索
Simulink的启动在MATLAB中键入>>Simulink,进入Simulink library,2014版本的可直接点击MATLAB界面上的Simulink library,在Simulink界面上选择File->New->Model。
如图1所示:
图1 Simulink界面
在Simulink一级标题下点击source将step(阶跃函数)拖入空白文件作为转速
给定,也可用两个ramp函数相减,使转速缓慢达到预定转速,如图2:
图2 转速给定
在Simulink一级标题下点击Ports & Subsystems 选择Subsystem放入空白文件并双击,删除In1和Out1的连线,如图3:
图3 子函数模块
选择Simulink>Continuous下的integrator、Simulink>discontinuous下的Saturation、Simulink>math operation下的gain和Add,连好线后保存并返回,作为PI调节器,其中saturation可设置上下限为100和-100,如图4:
图4 PI子函数模块设置
此PI调节器输出结果作为Iq的电流给定,同样方法得到一个PI调节器,输出结果作为电压给定,并设置saturation上下限为380和-380,Simulink下math operation选择sum双击并修改第二个“+”为“-”,如图5:
图5 转速和电流反馈PI调节
选择Simulink>Ports & Subsystems下的Subsystem 拖入并双击进入子系统,并添加2个In1和1个Out1如图6:
图6 接口模块
Simulink>math operation 下选择Trigonometric Function、Product、Subtract、Add加入文件,设置好后保存并退出,作为逆Park变换,如图7:
图7 反Park变换
再生成一个PI调节器,作为d轴电流调节器,Simulink>source中选择constant 并设置为0,如图8:
图8 静止坐标系电压生
svpwm模块建立过程过于复杂,可参考文献[1][2],只列出总体框图如图9和图10,其中Ts为开关周期,Udc为直流母线电压。
图9 SVPWM生成结构
图10 SVPWM生成模块
三相桥模块:早期版本MATLAB选择SimPowerSystems>specialized Technology>Power Electronics 文件下的Universal Bridge(ATTENTION:这一步不在Simulink一级标题下,往下寻找), 2014 版本在Simscape> SimPowerSystems> Technology>Power Electronics, 找不到可以在搜索框中
输入对应器件名称搜索。
直流母线电压源:SimPowerSystems>specialized Technology>Electrical sources 选择DC voltage source,电压设置为530V,如图11:
图11 三相桥模块
添加PM电机模块:SimPowerSystems>specialized Technology>Machines 选择Permanent Magnet Synchronous Motor, 在添加Step信号作为转矩输入,暂时设置为0,如图12:
图12 PMSM电机模块设置
选择Simulink>Signal routing下的Bus selector,PMSM上的m连接到Bus selector 上的输入端,双击Bus selector, 选择Signals in the bus下的项,点击中间的select,可以全部添加。
如图13:
图13 输出参数设置
选择Simulink>Signal routing下的Mux, 双击将数字改为3,将Bus selector输
出端的A BC相电流连接到Mux的输入端,如图,并选择simulink>Sink添加示波器Scope观测电流, 如果需要查看波形的FFT,双击scope>parameters>history, 去掉limit data point to last并勾选save data to workspace如图14:
图14电流解耦
Clark变换:simulink>Ports & Subsystems选择Subsystem,双击进入添加Mux 和DeMux,user-defined Functions 选择Fcn, 其中Iabc为三相电流,设置如图15:
图15 Clark变换参数设置
Park变换:Clark变换的输出Ia、Ib和电机的theta角作为park变换的输入,需要添加Mux模块,其中Function设置如图16所示:
图16 park变换参数设置
双击点击模型,点击parameter选项,根据设置的电机极对数选择对电机转子输出的机械角度乘以极对数得到电角度,如图17红色圈所示.电机为感性负
载,Clark电流变换的角度有90°相位差,所以需要减去90度.
Simscape>SimpowerSystem>specialized Technology选择powergui添加到仿真图中,最终仿真图如图17所示:
图17 总体框图
仿真参数设置Simulation>model configuration parameters,仿真步长可以设置为定步长或者变步长,定步长,此处设置为开关周期的一百分之一即1/600000,变步长可以设置最大步长为开关周期的百分之一,在不同步长情况下查看仿真结果:
图18 仿真参数设置
如果仿真过程中出现Data logging exceeded available memory,可以在示波器parameters中的参数,limit to last选项后的勾去掉,或者修改图18中仿真步长。
若要添加转矩反馈,可以添加在电流反馈环之前。
调整转速PI参数看看结果变化。
以上得到了最简易的电路图,反馈的转速单位为rad/s,给定转速单位若为r/min,需要在反馈的转速乘以30/pi。
线电压显示:simpower下面找到voltage measurement 添加三个到电路图,+端连接三相桥的A相,“-”连接三相桥的B相,其余两个分别连接B-C,C-A。
相电压显示:将三相桥的直流电压给定分为两个,中间接地ground,A B C相通过voltage measurement 与ground相减连接示波器即可,如图19:
图19 实验电路全图(可加测相电压)
四.实验报告要求:
1.对电机驱动系统的转速、电流、电压等仿真波形进行分析。
2.研究转速和电流调节器参数对驱动系统动态性能的影响。
参考文献:
[1] 范心明. 基于SIMULINK的SVPWM仿真[J]. 电气传动自动化,
2009,03:19-21+34.
[2] SVPWM的原理及法则推导和控制算法详解。