多潮位站改正
2022-2023年注册测绘师《测绘综合能力》预测试题11(答案解析)
2022-2023年注册测绘师《测绘综合能力》预测试题(答案解析)全文为Word可编辑,若为PDF皆为盗版,请谨慎购买!第壹卷一.综合考点题库(共50题)1.下列关于我国高程基准与深度基准关系的说法中,正确的是()。
A.二者是两个不同的大地水准面B.二者是同一个大地水准面C.二者是两个不平行的空间曲面D.二者是是两个不平行且相差一个常数的平面正确答案:C本题解析:高程基准是推算国家统一高程控制网中所有水准高程的起算依据,它包括一个水准基面和一个永久性水准原点。
通常理论上采用大地水准面,它是一个延伸到全球的静止海水面,也是一个地球重力等位面,实际上确定水准基面则是取验潮站长期观测结果计算出来的平均海面。
而深度基准面实际上是海图所载的水深起算面,不同时刻的水深测量的水深不同,存在的差数随各地的潮差而大小不同,把不同时刻测量的水深归算到这个深度基准面上,通常取在当地多年平均海面下深度为L 的位置。
2. 在制作遥感影像地图时,一般要叠加的矢量要素包括()。
A.植被B.交通网C.行政驻地名称D.境界线E.房屋面正确答案:A、B、E本题解析:ABE三项,植被、交通网与房屋面是在制作遥感影像地图时,一般要叠加的矢量要素。
CD两项,行政驻地名称和境界线是遥感影像上没有的地理要素。
3.产权人甲、乙共用一宗土地,无独自使用院落。
该宗地内,甲、乙分别拥有独立建筑物面积为 100 ㎡、200 ㎡,建筑占地总面积为 150 ㎡。
不考虑其他因素,如甲分摊得到宗地院落使用面积为100 ㎡,则该宗地面积为()㎡。
A.150B.300C.450D.600正确答案:C本题解析:甲分摊到的院落使用面积=100=100/(100+200)×总院落使用面积总院落使用面积=300 宗地面积=总院落使用面积+建基面积=300+150=450。
4.下列不属于房产测绘作用的是()。
A.法律方面作用B.社会服务作用C.地形方面作用D.经济方面作用正确答案:C本题解析:暂无解析5.数字空中三角测量中,下列关于影像内定向的说法正确的有()。
浅析单波束测深精度的影响因素及提升措施陆星浩1郭增长2连增增2
浅析单波束测深精度的影响因素及提升措施陆星浩1 郭增长2 连增增2发布时间:2021-10-06T06:55:45.330Z 来源:《基层建设》2021年第18期作者:陆星浩1 郭增长2 连增增2 [导读] 对单波束水深测量技术中影响测深精度的因素进行研究,指出影响数据精度的误差类型和来源,并对各种误差的特点进行分析,在综合各种因素的基础上重点从波束角、声速、延时、姿态、测线布设5个方面进行讨论,提出相应方面的测深精度提升措施,确保测深的高精度、高质量要求。
河南理工大学河南焦作 454150摘要:对单波束水深测量技术中影响测深精度的因素进行研究,指出影响数据精度的误差类型和来源,并对各种误差的特点进行分析,在综合各种因素的基础上重点从波束角、声速、延时、姿态、测线布设5个方面进行讨论,提出相应方面的测深精度提升措施,确保测深的高精度、高质量要求。
关键词:单波束;水深测量;影响因素;精度0 引言海洋测绘是海洋科学技术的其中一部分,海洋科学技术属于测绘科学与技术学科的一个重要分支,在政治、经济、科研和海洋资源开发及利用方面都发挥着不可替代的作用,尤其处于新世纪海洋空间全面开发的全新时代,海洋活动日益增多,对于海洋的探索和现代化建设正在全面展开,但是人类在海洋开发利用方面还面临着许多问题,最重要的就是海洋探测的技术手段和探测设备落后,这也使得海洋测绘落后于其他学科的发展[1][2]。
水深测量作为一项基础性的工作,随着海洋资源和空间的开发利用而使其自身需求不断增多,同时伴随着的是水深测量技术和手段的不断发展和完善,现如今单波束测深技术以其自身的便捷性、易操作、成本低等优势仍被广泛的应用于海洋及湖泊的水深测量工作中。
单波束测深包括传统验潮测量和RTK无验潮测量两种方法[3],虽然两种方法都可以满足常规特定条件下的水深测量要求,但是其测深过程的各种影响因素会给测量结果带来较大干扰,给水深测量过程的效率和测深数据的精度带来影响。
多潮位站时差法

多潮位站时差法
多潮位站时差法是一种潮汐观测方法,通过同时观测多个潮位站的潮汐变化,计算它们之间的潮汐时差,进而确定潮汐规律和潮汐预报。
多潮位站时差法的基本步骤如下:
1.选择多个潮位站,并安装潮汐观测设备,记录潮汐变化数据。
2.对于每个潮位站,根据观测数据计算其所对应的潮汐时刻,例如高潮时刻和低潮时刻。
3.计算不同潮位站之间的潮汐时差。
例如,如果在潮位站A观测到高潮时刻为t1,在潮位站B观测到高潮时刻为t2,则可以计算出两个潮位站之间的潮汐时差为t2-t1。
4.通过分析多个潮位站之间的潮汐时差,可以确定潮汐规律,例如潮汐相位、潮汐频率等。
5.根据潮汐规律,可以进行潮汐预报,预测未来某个时刻的潮汐状态。
多潮位站时差法是一种较为精确的潮汐观测方法,可以提高潮汐预报的准确性。
同时,多潮位站时差法还可以用于海洋地质勘探、海洋环境保护等领域。
潮汐对多波束测深的影响及改正 (1)
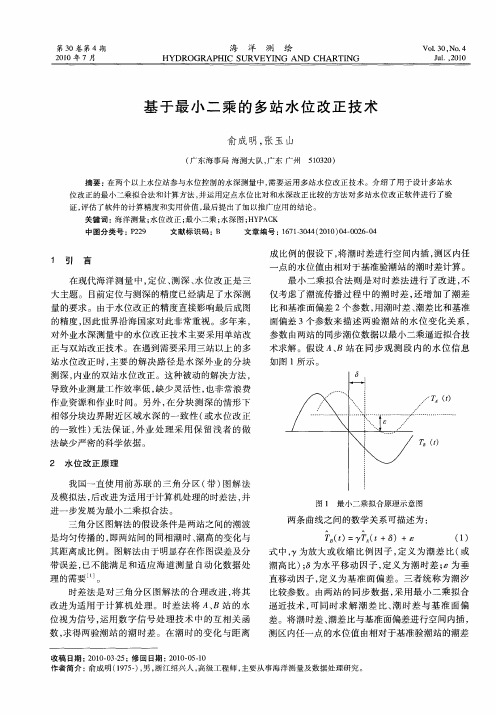
平均海面和 1985国家高程基准之间的关系 Δh。因
(11天津市塘沽区测绘所 ,天津 300450; 21海军海洋测绘研究所 ,天津 300061; 3192899 部队 ,浙江 宁波 315200 )
摘要 : 讨论了潮汐对多波束测深的影响 ;通过分析验潮站控制及潮汐场解算的潮汐改正传统模式的特点 ,设计 了该模式的工作流程 ;比较了传统改正模式与 GPS无验潮模式的不同 ,研究了无验潮模式及陆海图拼接所涉及的 垂直基准转换技术 。
第 28卷第 2期 2008年 3月
海 洋 测 绘
H YD RO GRA PH IC SU RV EY IN G AND CHA R T IN G
V o l128, N o12 M ar. , 2008
潮汐对多波束测深的影响及改正
徐永斌 1 ,黄辰虎 2, 3 ,申家双 2 ,欧阳永忠 2 ,徐广袖 2 ,韩建国 2
10cm ,通过 (8)式可以实现 GPS大地高 H0和 GPS无 验潮成果水深 h之间的转换 。
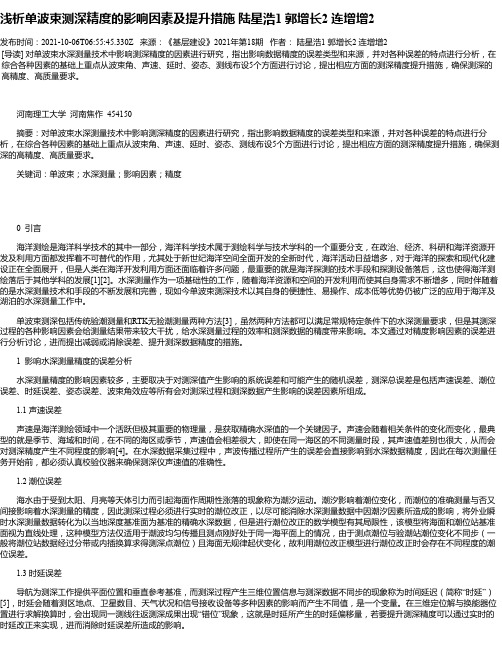
在沿岸浅水域 ,验潮站存在几种重要的基准面 ,
对于在该区域实施 GPS无验潮测量并将其成果水 深 h转化为海底地形高程从而实现海图与陆图的无 缝拼接具有重要意义 ,如图 3所示 。
图 3 沿岸浅水域几种重要的垂直基准面
国际海道测量标准 IHO S - 44 已明确规定 ,在 重要的海峡 、航道 、港口 、码头和锚地等海区 ,要求实 现全覆盖测量 ,目前浅水多波束测深系统已广泛应 用于以上重点浅水域的海底地形测量 。另外在大陆 架和专属经济区勘测 、海上油田的井场调查 、海底管 线路由调查等方面 ,多波束测深系统也得到了大量 的应用 。我国沿岸浅水域潮差一般可达到 2 ~8m , 近海水域潮差也达到 2 ~5m ,潮汐改正已成为影响 多波束测深成果精度的最主要因素之一 。本文将分 析多波束测深潮汐改正技术的传统改正模式及 GPS 无验潮改正模式各自特点及应用 。
水深测量误差来源及分析
水深测量误差来源及分析水深测量误差来源及分析摘要随着社会的发展,陆地不可再生资源的减少,围海造地、港口开发、水下资源探测开发等工程建设项目层出不穷,基于此的水深测量项目也越来越多,对水深测量速度,精度等方面要求也越来越高。
水下测量系统已愈来愈被广泛采用。
相应的测量误差也不可避免,本文简述了现代海洋水深测量的基本特点及误差产生原因,并对提高测量精度提出了一些建议。
关键词:水深测量、误差、精度分析中图分类号: P716+.11 文献标识码: A 文章编号:1 水深测量系统组成及基本原理1.1 系统组成水深测量系统由基站和测船移动站、测深仪、计算机和内业处理系统构成,基站和移动站由GPS接收天线、电台天线、主机、数据传输组成:测深仪由换能器、主机和数据传输部分组成。
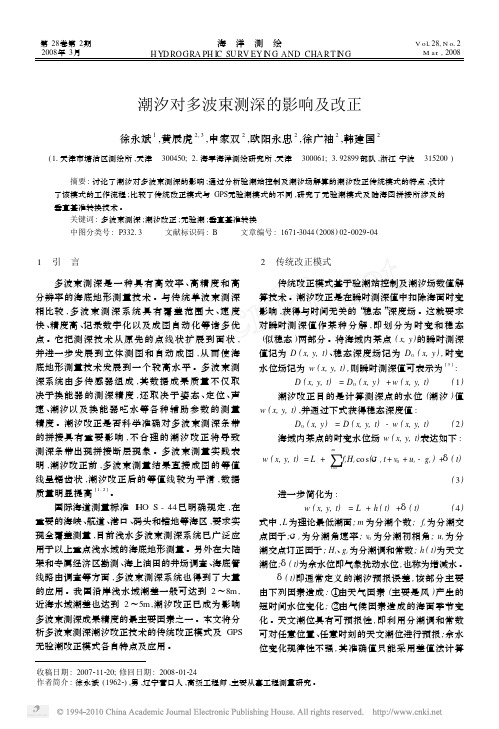
1.2 测深原理图2-1测深系统基本原理如图2-1,常规测深法是利用水准测量方法,计算水面与深度基准面之间的关系,用回声定位法测出水面到泥面距离,计算出泥面高程。
无验潮测深法是利用GPS接收天线中心获得测点的位置和基准面的关系,与常规测深法相同,量取GPS接收天线中心到测深仪换能器距离以及测深仪换能器测得与泥面的距离,得出泥面高程。
测深仪换能器连续的向水下发射声波,利用回声定位的原理测得声波在水下传播的时间,从而得到相应位置水深值,经过测量软件处理,可得到水下地形特征点高程。
水下地形测量包括定位和水深测量。
就目前水下地形测量主流技术而言,定位采用的是GPS定位模式,而水深测量采用的是回声测深仪。
这样就可以确定测点的高程:式中,为水底高程,为水面高程,为测量水深,为换能器的静吃水。
2 水深测量流程3 误差分析现代海洋测量误差来自多个方面,主要包括测深误差、定位误差、潮位改正误差、测量环境误差。
3.1测深误差,根据回声测深仪工作原理,水面至水底的深度是通过声波传递时间计算得出。
其数学公式为:H=Cm*Δt/2式中Cm为平均声速,Δt 为发射与接收信号时间差。
HiMAX海洋测量软件使用说明书

HiMAX 海洋测量软件使用说明书
目录
概述......................................................... 1 1.1 软件概述............................................. 2 1.2 技术参数............................................. 4 1.3 安装与卸载........................................... 4 1.4 本章小结 ............................................ 11
警告:警告提示的内容一般为非常重要的提示,如果没有按 照警告内容操作,将会造成仪器的损害,数据的丢 失,以及系统的崩溃,甚至会危及到人身安全。
责任免除
使用本软件之前,请您务必仔细阅读使用说明书,这会有助于您更好 地使用本软件。广州市中海达测绘仪器有限公司不对您未按照使用说明书 的要求而操作本软件,或未能正确理解使用说明书的要求而误操作本软件
项目管理.................................................... 17 3.1 项目设置 ............................................ 18 3.2 本章小结 ............................................ 19
坐标参数.................................................... 20 4.1 坐标转换参数设置 .................................... 21 4.2 本章小结 ............................................ 31
连云港港30万吨级航道疏浚工程施工难点及控制措施

中国港湾建设Construction difficulties and control measures of 300000tons waterwaydredging project in Lianyungang PortLIAO Hong-gang 1,ZHU Lin-lin 2(CC Dredging (Group)Co.,Ltd.,Shanghai 200082,China;CC Guangzhou Dredging Co.,Ltd.,Guangzhou,Guangdong 510290,China )Abstract :Taking the second phase of the 300000tons waterway project of Lianyungang Port as an example,aiming at the construction difficulties such as long channel length,difficult soil excavate,and complicated weather,we proposed more comprehensive control measures to enable dredging ships to exert higher dredging efficiency,effectively control costs,complete engineering tasks safely and smoothly,and summarized a set of technical experience,which can provide better reference and demonstration for follow-up projects or similar projects.Key words :Lianyungang Port;300000tons waterway;dredging project;construction difficulties;control measures摘要:以连云港港30万吨级航道二期工程为例,面对航道里程长、土质难挖、气象复杂等施工难点,提出了较为全面的控制措施,可使疏浚船舶发挥较高的挖泥效率,有效控制成本,安全顺利地完成工程任务,并总结了一套技术经验,可为后续工程或同类型项目提供借鉴和示范。
GPS精密定位中的海潮位移改正

从图 2 中同样可以看出一定的周期性 ,尤其在 垂直(U) 方向的周期性较为明显。表 2 (2d 平差结 果) 的数据则说明一个月的海潮改正的平均值很小 (其中 ,N 方向的月平均改正值为 - 0. 1mm ,E 方向为 - 0. 4mm ,U 方向为 1. 1mm) ,所以对长时间连续观测 的测站来说 ,海潮改正对基线分量的影响不大 ,对于 短基线来说 ,甚至可以忽略。与海潮改正对基线 影响的周日变化规律类似 (图1) ,对于上海2乌鲁木
多 ,从而占据了主导地位 ,而对内陆测站的影响却 几乎可以忽略。那么 ,海潮改正对基线分量的影响 就近似地表现为对沿海测站的影响。反之 ,如果当 两个测站都位于内陆时 ,海潮改正对它们的影响之 间的相对差别较小 ,故不会表现为接近于对其中某 个测站的影响 ,而是它们的非线性叠加。
另外 ,笔者还对上述 6 个 IGS 站 2001 年 020 ~050 天 (1 月 20 日至 2 月 19 日) 为期 1 个月 的观测数据分别按加入与不加入海潮改正用 GAMIT软件进行了计算 。在计算中 , 同样利用 IGS 提供的精密星历 ,但是固定乌鲁木齐站坐标 进行基线求解 。图 2 给出了上海2乌鲁木齐 、上海 2武汉 和 乌 鲁 木 齐2武 汉 的 基 线 分 量 之 差 的 变 化 (图中横向连续曲线 ,单位为 mm ,横坐标为年积 日 DOY(day of year) ) 和计算误差 (图中纵向短线 , 单位为 cm ;图中 1mm 相当于 2cm 的误差 ,误差大 小为 2σ) ,上海2乌鲁木齐基线分量变化的月平均 数值列于表 2 (2d 平差结果) 。
海洋测绘中多站潮汐改正预报技术的研究
海洋测绘中多站潮汐改正预报技术的研究
黄德全;黄悦
【期刊名称】《实验室研究与探索》
【年(卷),期】2008(027)007
【摘要】潮汐改正是水深测量中一个比较关键的技术.作者在分析单站潮汐改正方法的基础上,对多站潮汐改正的技术进行了分析、研究并提出了相关的技术方法.该方法可以广泛地应用于海洋测绘、港湾工程、航道建设等.
【总页数】5页(P42-46)
【作者】黄德全;黄悦
【作者单位】中山大学,地理科学与规划学院,广东,广州,510275;增城市规划局城市建设测量队,广东,广州,511300
【正文语种】中文
【中图分类】P288.4
【相关文献】
1.基于海洋潮汐动力模型的水位改正方法研究 [J], 刘洪博;潘国富;应元康;黄潘阳;胡涛骏
2.海洋磁力测量中多站地磁日变改正值计算方法研究 [J], 边刚;刘雁春;卞光浪;于波
3.基于海洋数值模型的潮汐潮流业务化预报技术研究 [J], 王彪; 卢士强; 陈义中
4.基于海洋数值模型的潮汐潮流业务化预报技术研究 [J], 王彪; 卢士强; 陈义中
5.海洋测绘中船速效应及测深延迟效应误差分析与改正 [J], 梁乃安;符信皇;李伟恩
因版权原因,仅展示原文概要,查看原文内容请购买。
多波束多验潮站水位改正方法浅析
一 一
【 8 】Or s z a g h o v a J ,Bo t r h wi e k A. G. L . a n d Ty a l o r P H. F r o m t h e
p a d d l e t o t h e b e a c h — — a b o u s s i n e s q s h a l l o w wa t e r n u me i r c a l wa v e t a n k b a s e d o n ma d s e n a n d S o r e n s e n’ s
【 6 】 Ma d s e n P . A. ,S o r e n s e n O. R. A n e w or f m o f t h e B o u s s i n e s q
e q u a t i o n s wi t h i mp r o v e d l i n e a r d i s p e r s i o n c h a r a c t e i r s t i c s . P a r t
2 . A s l o wl y — v a r y i n g b a t h y me t r y [ J ] . Co a s t a l E n g i n e e r i n g ,
1 9 9 2 ,1 8( 3 —4) :1 8 3 — 2 0 4 . 【 7 ] K i m G. ,L e e C. ,S u h K. E x t e n d e d B o u s s i n e s q e q u a t i o n s or f
【 5 】房克照,邹志利 ,孙 家文等. 扩展型 B o u s s i n e s q水波方程
前进到达斜面最大爬高。受重 力影 响,t * = - 6 5 时刻 ,水体 回 落沿斜坡下滑 ,仅在坡面上残 留一层浅水 。总体来看模 拟结
浅述多波束测深系统水下地形测量中质量控制措施与质量分析

浅述多波束测深系统水下地形测量中质量控制措施与质量分析◎ 王文胜 福建省港航勘察科技有限公司摘 要:文章针对多波束测深系统在水下地形测量中影响测量精度的因素、质量控制措施和成果数据精度评估进行了讨论。
笔者介绍了多波束测深系统的原理和应用,从质量控制措施和成果质量分析两个方面进行了详细阐述,提出了外业数据采集阶段和内业数据后处理阶段一些控制措施的方法。
在成果质量分析方面,介绍了比较分析方法对多波束系统的精度评估方法。
文章最后总结了多波束测深系统的测量精度是水下地形测量中的关键问题,通过合理的措施可以提高测量结果的准确性和可靠性,同时呼吁进一步研究和改进多波束系统,以满足不同精度要求的水下地形测量需求。
关键词:多波束测深系统;影响测量精度的因素;质量控制措施;成果质量分析水下地形测量是海洋科学和海洋工程中的重要研究内容,而测量精度控制与精度评估是水下地形测量中的关键问题。
在水下地形测量中,多波束测深系统作为一种广泛用于水下地形测量的技术,具有高效、高精度的特点,在测量过程中,能实现水深的完全覆盖,在呈现水下地貌方面能做到更准确、更生动[1]。
多波束测深系统通过同时发送多个声波束并接收反射波,能够获得多个测深值,提高测量的效率和精度。
因此,对多波束测深系统的质量控制和精度评估具有重要意义。
1.多波束测深系统的工作原理多波束测深系统是基于声学原理进行水下地形测量的技术。
它利用多个声纳传感器发射扇形波束,并接收水底反射回波信号,通过对信号的处理和计算,可以准确地获取水下地形的信息[2]。
多波束测深系统的工作原理如下:1)多声波束发射:系统中的多个声纳传感器同时发射多个声波束。
每个声波束的发射方向和角度可以根据测量需求进行调整。
2)声波传播和反射:发射的声波束在水中传播,当遇到水下地形时,一部分声波会被地形表面反射,形成回波信号。
3)回波信号接收:多个声纳传感器接收到反射的回波信号,并将其转化为电信号。
4)信号处理:接收到的回波信号经过放大、滤波、时域和频域处理等,以提取出与水下地形相关的信息。
多潮位站数据程序化处理及其在远岸水深测量中的应用
多潮位站数据程序化处理及其在远岸水深测量中的应用吴卫平;孙洪瑞【摘要】In order to realize offshore bathymetric survey,triangulation-zone correction method is used to get tide level correction data rapidly and accurately,realize the program processing of multi-station tidal level data and generate automatically survey point elevation,which is also compared with the traditional method to analyze the superiority of the above method applied in bathymetric survey.%为实现远岸水深测量的需要,本文利用三角分带改正法,快速准确地获得潮位改正数,实现多潮位站的数据程序化处理,自动生成测点高程,并与传统方法进行比较,分析该方法在水深测量中的优越性。
【期刊名称】《港工技术》【年(卷),期】2014(000)004【总页数】3页(P87-89)【关键词】潮位推算;水位改正;水深测量【作者】吴卫平;孙洪瑞【作者单位】中交第三航务工程勘察设计院有限公司,上海 200032;中交第三航务工程勘察设计院有限公司,上海 200032【正文语种】中文【中图分类】P333引言潮位(水位)的控制与改正是水深测量过程中非常重要和关键的环节,在沿海水运工程测量中,水位改正主要采用分带法。
分带方法一般分为三种:单站分带水位改正、双站分带水位改正,三角(三站)分带改正[1]。
传统的人工分带法(图解法)计算繁琐,工作量繁重,且处理精度不高,严重制约了成图进度和精度。
注册测绘师海洋测绘考试要点
注册测绘师海洋测绘考试要点海洋测绘考试基本要求1.根据工程要求按海洋测绘进行项目分类,依据项目分类,选择测量方法,制定测量方案。
2.依据海道测量定位、测深原理和使用仪器的实际情况,分析水深定位方法的可行性及其对水深测量成果的影响。
3.根据测区已有深度基准面资料情况,确定深度基准面联测和传递方案;依据潮汐理论和测区潮汐变化情况,分析潮波传播规律;分析各相关因素对数据采集质量的影响,分析数据处理和数据检查方法对成果质量及判断的影响。
4.根据实际情况,提出提供成果的形式和要求;按照制图原理,结合海图实际确定制图原则。
第 1 章海洋定位及水深测量1.1 海洋测绘的作用与任务1.1.1 海洋测绘的作用1.1.2 海洋测绘的任务海洋测绘是海洋测量和海图绘制的总称,是对整个海洋空间,包括海面水体和海底进行全方位、多要素的综合测量,获取包括大气(气温、风、雨、云、雾等)、水文(海水温度、盐度、密度、潮汐、波浪、海流等)以及海底地形、地貌、底质、重力、磁力、海底扩张等各种信息和数据并绘制成不同目的和用途的专题图件,为经济、军事和科学服务。
其任务是对海洋及其邻近陆地和江河湖泊进行测量和调查,获取海洋基础地理信息,编制各种海图和航海资料,为航海、国防建设、海洋开发和海洋研究服务。
根据海洋测量工作的目的不同,可把海洋测量任务划分为科学性任务和实用性任务两大类:( l )科学性任务。
包括:①为研究地球形状提供更多的数据资料;②为研究海底地质的构造运动提供必要的资料;③为海洋环境研究工作提供测绘保障。
( 2 )实用性任务。
包括:①海洋自然资源的勘探和离岸工程;②航运、救援与航道;③近岸工程;④渔业捕捞;⑤其他海底工程。
海洋测绘与陆地测绘的有关理论和方法关系密切。
陆地上的许多测绘学理论和方法,如测量数据处理理论、大地测量技术、地图制图方法,都可运用到海洋测绘中,但海洋测绘又有许多不同于陆地测绘的特点。
1.2 平面定位1.2.1 海上定位方法.卫星定位是目前海上定位的主要手段。
水深测量中多站潮位的数据处理程序设计

水深测量中多站潮位的数据处理程序设计1 前言在沿海工程的施工测量工作中,潮位的控制及改正是非常重要的环节。
以往采用传统的人工分带进行潮位改正,不但计算方法繁琐,工作量大,费时费力,处理精度也较低,严重限制了成图工期,影响作业进度,最新的HYPACK MAX软件进行潮位处理技术也只能同时处理最多三个潮位站且只能为同一天的数据,现有的潮位处理技术已不能适应测绘技术发展的需求。
为提高水深测量数据处理的自动化程度,减少测绘人员工作量,加快出图速度,本文结合实际生产的工程实例进行了软件的开发,针对潮位改正中的潮位插值计算方法、潮位分区区域的划分等几个方面进行了探讨,并编制出相应软件,使之能适应各种复杂的测区潮位控制情况,操作方便,处理结果可靠,具有重要的实用价值。
2 潮位数据处理方法在进行多站潮位内插改正时,不论图解还是由软件自动改正都必须遵循如下的潮位分带假设。
假定潮位站间潮波以一定速度匀速传播,潮波整个潮波匀速传播意味着相邻站潮波周期相似,潮高相关。
也就是潮位站间的潮位的潮时、潮高变化与其距离成比例。
软件实现多站潮位内插改正的原理:采用现有的计算机技术,借助AUTO CAD平台,通过潮位记录文件绘制各站潮位过程曲线,使用水深原始记录文件中水深定位点的时间,在图上内插各潮位站潮位,使用水深定位点的位置信息,不再沿用传统潮位每0.1m为一分带的潮位分带方法,消除了传统的分带改正方法存在潮位人工分带的人为造成的水位台阶式跳跃,而与实际潮位面是一个连续的曲面情况不相符的情况。
在CAD平面图中,根据水深点与潮位站的几何关系,根据潮位站分布、潮位改正方案划分测区分区,内插瞬时潮位,此方法较以往通过数学计算内插法相比,克服潮位改正不直观,准备数据复杂,不容易发现错误的弱点。
2.1单站潮位改正方法在单站潮位站能够控制的测区范围内,在Auto CAD中,以潮高为纵轴,时间为横轴,绘制该站的潮位过程曲线,根据水深原始文件中的水深点的时间,在潮位过程曲线上内插潮位值,将每点的潮位数据添加到水深原始文件中。
水深测量误差来源及分析

水深测量误差来源及分析摘要随着社会的发展,陆地不可再生资源的减少,围海造地、港口开发、水下资源探测开发等工程建设项目层出不穷,基于此的水深测量项目也越来越多,对水深测量速度,精度等方面要求也越来越高。
水下测量系统已愈来愈被广泛采用。
相应的测量误差也不可避免,本文简述了现代海洋水深测量的基本特点及误差产生原因,并对提高测量精度提出了一些建议。
关键词:水深测量、误差、精度分析中图分类号: p716+.11 文献标识码: a 文章编号:1 水深测量系统组成及基本原理1.1 系统组成水深测量系统由基站和测船移动站、测深仪、计算机和内业处理系统构成,基站和移动站由gps接收天线、电台天线、主机、数据传输组成:测深仪由换能器、主机和数据传输部分组成。
1.2 测深原理图2-1测深系统基本原理如图2-1,常规测深法是利用水准测量方法,计算水面与深度基准面之间的关系,用回声定位法测出水面到泥面距离,计算出泥面高程。
无验潮测深法是利用gps接收天线中心获得测点的位置和基准面的关系,与常规测深法相同,量取gps接收天线中心到测深仪换能器距离以及测深仪换能器测得与泥面的距离,得出泥面高程。
测深仪换能器连续的向水下发射声波,利用回声定位的原理测得声波在水下传播的时间,从而得到相应位置水深值,经过测量软件处理,可得到水下地形特征点高程。
水下地形测量包括定位和水深测量。
就目前水下地形测量主流技术而言,定位采用的是gps定位模式,而水深测量采用的是回声测深仪。
这样就可以确定测点的高程:式中,为水底高程,为水面高程,为测量水深,为换能器的静吃水。
2 水深测量流程3 误差分析现代海洋测量误差来自多个方面,主要包括测深误差、定位误差、潮位改正误差、测量环境误差。
3.1测深误差,根据回声测深仪工作原理,水面至水底的深度是通过声波传递时间计算得出。
其数学公式为:h=cm*δt/2式中cm为平均声速,δt 为发射与接收信号时间差。
3.1.1声速改正声波在水中传播速度受水温及盐度影响而不同,一般按下列经验公式计算:c=1450+4.206t-0.0366t2+1.137(s-35)式中:c为平均声速, t为水温,单位0,s为含盐度。
注册测绘师海洋测绘案例讲义
其中,某海岛验潮站附近GPS点A基于国家高程基准的高程为1.986m,基于当地深度基准面的高程为 4.434m,该区域高程异常0.77cm.该验潮站附近海域中有一暗礁B,海图上标注的最浅水深为1.2m.
问题:
在海岛验潮站附近选择GPS点点位应注意哪些事项?
计算该三边同步环的平均边长(结果取至0.01㏎)及各坐标分量 闭合差Wx,Wy,Wz的限差(结果取至0.1mm)
1、测区条件:该地区岛屿地理环境复杂,海陆交通困难,个别海岛验潮站位于地势陡峭的岸边,有些验潮 站临近码头的大型作业设施或高压输电线。为使GPS点尽量靠近验潮站水准点,给GPS点位的选择造成一定 的困难。
2、执行规范:《全球定位系统GPS测量规范》等
3、外爷观测与数据处理:
(1)新测C级GPS点若干个,外业利用双频大地型GPS接收机(标准精度5mm+1ppm)进行了同步观测。 基线解算后,对所有三边同步环的坐标闭合差Ws和各坐标分量闭合差Wx,Wy,Wz进行检核。
2~3条测深线。 (5)使用多波束测声系统全覆盖测深时,应根据水深、仪器性能,
保证测线间有10%的重叠来布设测线。 (6)其他海洋工程根据实际的需要可采用其他布设方式。
1.准备工作-多波束校准
按顺序分为: 时延校正:精确到0.1秒 横摇校正:精确到0.01° 纵摇校正:精确到0.05° 罗经校正:精确到0.05°,检校时对孤立点进行两次测量,测线重
偏差:垂直移动因子。 按站数多少分为:单站改正,一个验潮站范围内,按整点或半点
水位数据内插出改正数;双站,用两个站水位数据分带改正;多 站,用三个站水位数据分带改正。
3数据处理和质量评估
数据处理:多波束数据处理,水深改正,质量控制,归位计算
基于最小二乘的多站水位改正技术
2 水位 改正原 理
二 /
图 1 最 小 二 乘 拟 合 原 理 不 意 图
() f
我 国一 直使 用 前 苏 联 的三 角 分 区 ( ) 带 图解 法
及 模拟 法 , 改进 为适用 于计 算机 处理 的时差 法 , 后 并
进一步 发展 为最小 二乘 拟合 法 。
三 角分 区 图解 法 的假设条 件是 两站 之 间的潮波
两条 曲线之 间 的数学关 系 可描述 为 :
B
是均匀 传播 的 , 即两站 问 的同相潮 时 、 高 的变化 与 潮 其 距离 成 比例 。图解法 由于 明显存 在作 图误差 及分
带误差 , 已不 能满 足 和适 应 海 道 测量 自动 化 数 据处
第3 O卷 第 4期
2l 0 0年 7月
海
洋
测 绘
V O. 0 . . 13 NO 4 J 1 201 u .. 0
HYD R0GRAPm C SURVEYI G ND N A CHA RTI G N
基 于 最 小 二 乘 的 多 站 水 位 改 正 技 术
俞成 明, 玉 山 张
潮高 比)6 ; 为水平移动 因子 , 定义为潮时差 ; 为垂 直移动 因子 , 义 为基 准 面 偏 差 。三 者统 称 为 潮 汐 定 比较参 数 。由两 站 的 同步 数 据 , 用 最 小二 乘 拟 合 采
逼 近技 术 , 同 时 求 解 潮 差 比 、 时 差 与 基 准 面偏 可 潮
在 现代海 洋 测量 中 , 位 、 深 、 位 改 正是 三 定 测 水 大 主题 。 目前定 位 与测深 的精 度 已经满足 了水 深测
量 的要 求 。由于水 位改正 的精 度直 接影 响最后 成 图 的精 度 , 因此世 界沿 海 国家对此 非 常重视 。多年 来 , 对 外业水 深测量 中的水位 改正 技术 主要采 用单 站改 正 与双站 改正技 术 。在遇 到需要 采用 三站 以上 的多 站水 位改 正时 , 主要 的解 决 路 径是 水 深 外业 的分 块 测深 , 内业 的双 站水位 改 正 。这 种被 动 的解 决方 法 ,
单波束测深系统水深数据

3.1水深测量精度
3.1.11 船速效应 • 换能器从发射出信号(T1)到接收到
信号(T2),测船已经移动了一段距 离,实际(T2)接收的是从(T1)发 射的波束边缘处反射而来的信号,即 得到的并非发射时刻船体正下方的水 深,而是船体后方的水深。
• 在水深较浅(<75m)、船速较慢 (<30kn)时,此项误差可以忽略。
3.1水深测量精度
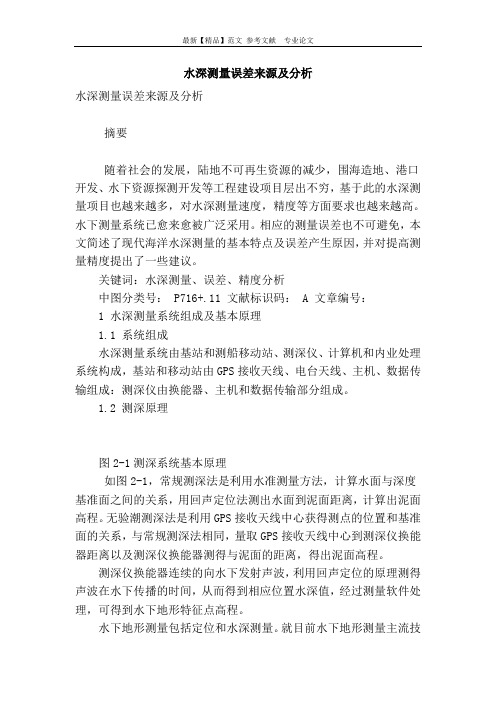
3.1.10 波束角影响 • 测船沿航线上坡,实测
水深(实线)变浅
3.1水深测量精度
3.1.10 波束角影响 • 漏测海底凹坑
3.1水深测量精度
3.1.10 波束角影响 • 海底地形起伏,造成海底
变形(峰拉长、谷压缩)。 • 这是仪器性能决定的且为
随机误差,地形起伏越大 误差越大,无法消除。海 底平坦时影响较小。
3.1.1 定位 • 指定位仪本身的固有误差和定位偏心误差。定位
偏心误差,是指定位仪天线相位中心与测深仪换 能器中心不重合造成的误差,此项误差通过使测 深仪换能器保持垂直并将定位仪天线直接安装在 测深仪换能器正上方,而得到基本消除。
3.1水深测量精度
3.1.2 信号延迟 • 定位与测深信号的不同步,
水深数据的各项改正
• 4、吃水改正。静吃水改正和动吃水改正。 实际操作中,动吃水比较难确定。不同的 船、不同速度时刻是不同的。
水深数据的各项改正
• 5、姿态改正。横摇、纵摇、升沉。在外海 区域单波束测量时,我们进行升沉改正。 在实际应用中,在船舶拐弯、受到大海浪 影响时,姿态仪数据容易失效,要重新进 行初始化计算。
潮位改正水深测量
• 1、平面定位:1:2000以下,可采用信标机 测量,1:1000的图需要rtk进行平面定位。
杭州湾跨海大桥桥位地形测绘中的潮位改正
杭州湾跨海大桥桥位地形测绘中的潮位改正
陈尚州;张奠梅
【期刊名称】《海洋学研究》
【年(卷),期】2002(020)004
【摘要】在杭州湾跨海大桥桥位地形测绘中,采用三角分带解析法进行潮位改正计算,结果表明:合理布设潮位站、合理安排测量时间,可以提高地形测量精度,正确地进行潮位计算.一般应在高平潮前后3 h时间内施测,可保证浅滩不出现测量空白区.地形测绘过程中还应布设不少于主测线数量的5%的检查线,以检查其测量精度.在所测的河口湾两岸潮位明显不等时,采用三角分带解析法进行潮位改正计算,其结果合理、正确,可达到规范的要求.
【总页数】5页(P30-34)
【作者】陈尚州;张奠梅
【作者单位】浙江省水利水电河口海岸研究设计院,勘测分院,浙江,杭州,310008;浙江省水利水电河口海岸研究设计院,勘测分院,浙江,杭州,310008
【正文语种】中文
【中图分类】P229;U442
【相关文献】
1.水下地形测绘中潮位改正误差分析 [J], 吴春节;许建宣;王智明
2.RTK技术在杭州湾跨海大桥桥位地形测绘中的应用 [J], 任少华;陈尚州
3.在CARIS HIPS中实现多潮位站水位改正 [J], 刘雷;张永合
4.GPS RTK技术在杭州湾大桥桥位地形测绘中的实践 [J], 任少华;陈尚州;等
5.GPS精密定位中的海潮位移改正 [J], 郑祎;伍吉仓;王解先;顾国华
因版权原因,仅展示原文概要,查看原文内容请购买。