PX4源码开发人员文档(一)——软件架构
PX4源码分析以及思路随笔1

PX4源码分析以及思路随笔1PX4源码分析,以及思路随笔。
目录:1.0 环境安装1.1 roll pitch yaw2.1 loop()3.1 fastloop()3.1 .1 read_AHRS()3.1.1.1 ins.update()3.1.2 rate_controller_run()3.1.2.1 _motors.set_roll()(嵌套了rate_bf_to_motor_roll)3.1.3 motors_output()3.1.3.1 update_throttle_filter()3.1.3.2 update_battery_resistance()3.1.3.3 update_lift_max_from_batt_voltage()1.0环境安装1.首先安装px4_toolchain_installer_v14_win.exe,并配置好java 环境(安装jdk,32位)。
2.安装GitHub网站:/dev/docs/building-px4-with-make.html若提示失败,在IE浏览器中打开网页,http变为https,不断尝试。
3.克隆程序(需要翻墙),可能多次失败。
4.从C:\px4\toolchain\msys\1.0内的eclipse批处理文件打开eclipse。
5.按照/dev/docs/editing-the-code-with-eclips e.html从第二张图开始。
注:第二张图位置为ardupilot的位置。
返回目录2.1 loop函数:1.Setup各种初始化,先忽略。
2.初始定义第一个是函数名,第二个单位为赫兹为过多少时间调用一次,第三个单位为微秒,即为最大花费时间。
const AP_Scheduler::Task Copter::scheduler_tasks[] = {SCHED_TASK(rc_loop, 100, 130), /* 控制角 */SCHED_TASK(throttle_loop, 50, 75), /*油门控制*/SCHED_TASK(update_GPS, 50, 200), /* GPS更新*/3.从Loop()开始。
PX4的无人机飞控应用开发

1、PX4/Pixhawk飞控软件架构简介PX4是目前最流行的开源飞控板之一。
PX4的软件系统实际上就是一个firmware,其核心OS 为NuttX实时ARM系统。
其固件同时附带了一系列工具集、系统驱动/模块与外围软件接口层,所有这些软件(包括用户自定义的飞控软件)随OS内核一起,统一编译为固件形式,然后上传到飞控板中,从而实现对飞控板的软件配置。
PX4配套的软件架构主要分为4层。
理解其软件架构是开发用户自定义飞控应用软件的基础。
a) API层:这个好理解。
b) 框架层:包含了操作基础飞行控制的默认程序集(节点)c) 系统库:包含了所有的系统库和基本交通控制的函数d) OS内核:提供硬件驱动程序、网络、UAVCAN和故障安全系统上述是个面向PX4系统实现者的相对具体的软件架构。
实际上还有另外一种面向PX4自定义飞控应用开发者的高层软件架构描述,相对抽象,但更简单,就是整个PX4的软件从整体上分为2层:a) PX4 flight stack:一系列自治无人机自动控制算法的集合b) PX4 Middleware:一系列针对无人机控制器、传感器等物理设备的驱动及底层通信、调度等机制的集合PX4软件架构中,最有意思的一点在于整个架构的抽象性(多态性)。
即,为了最大限度保障飞控算法代码的重用性,其将飞控逻辑与具体的底层控制器指令实现进行了解耦合。
一套高层飞控算法(如autopilot、GeoFence等)在不做显著修改的情况下,能够适用于固定翼、直升机、多旋翼等多种机型的控制场合,这时候就体现出PX4飞控的威力来了:在用户程序写好之后,如果需要替换无人机机架的话,仅需简单的修改一下机架配置参数即可,高层的用户自定义飞控应用几乎无需修改。
理解上述初衷至关重要。
有很多搞自动化出身、没太多软件经验的朋友倾向于直接使用底层控制协议来控制飞控板,但实际上PX4架构已经在更高的抽象层面上提供了更好的选择,无论是代码维护成本、开发效率、硬件兼容性都能显著高于前者。
xc2c64 开发流程

xc2c64 开发流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!xc2c64 是一款可编程逻辑器件,以下是一般的开发流程:1. 设计规划:确定项目需求和功能,制定设计方案。
开发环境搭建PX4

PX4/Pixhawk---快速成为开发者(Windows)2015-07-101 快速成为开发者入门教程(翻译)---官方1.1 编译环境(1)安装MSysGIT安装完成后,配置GIT。
∙安装注意安装过程中除了下面一步外,其他的步骤都采用默认安装。
∙GIT中文乱码D:\Program Files (x86)\Git\etc中的git-completion.bash文件最后一行加上:aliasls=‘ls --show-control-chars --color=auto‘∙在GIT终端输入下面的命令可以提高GIT的输出格式gitconfig --global color.branch autogitconfig --global color.diff autogitconfig --global color.interactive autogitconfig --global color.status auto∙配置用户名和邮箱(GIT注册用户名和邮箱)gitconfig --global "Your Name"gitconfig --global user.email you@∙检查FTDI电缆和PX4的连接system_profilerSPUSBDataType(测试无用,可能是没连接问题)(2)安装TortoiseGIT安装完后,桌面上右键菜单中就会有TortoiseGIT的选项了。
右键菜单点击"GitInit..",再右键,菜单发生改变,变为如下:1.2 工具链安装和配置(1)本次使用的工具链版本为px4_toolchain_installer_v14_win.exe(2)安装好后,路径为D:\px4(默认的为C:\px4);附带的PX4的驱动程序也安装好了(win8需另外配置);(3)通过PX4 Toolchain下载PX4源码:开始菜单--->应用程序--->PX4 Toolchain--->PX4 Software Download(4)下载的源码包含路径和文件夹:px4o Firmware – PX4 固件(所有模块),包括MAVLinkNuttX – NuttX实时操作系统(RTOS)o libopencm3 –可选:开源Cortex Mx 库, 仅仅用于引导(bootloaders)o Bootloader –可选: Bootloaders, 通常不需要操作、修改。
PX4源码开发人员文档(三)——进程间通讯的开发者指南

进程/应用之间的通信(例如将传感器应用的传感器数据发送到姿态滤波应用)是PX4软件架构的关键部分。
进程(通常又被叫做节点(node))通过命名为总线(buses)进行消息交换的过程被称作订阅主题(topics)。
在PX4中,一个订阅主题仅包含一个消息类型,比如vehicle_attitude订阅主题传输一个包含姿态结构(滚转、俯仰和偏航估计)的消息。
节点可以在总线/订阅主题上发布(publish)一个消息(发送数据)或者订阅(subscribe)一个总线/订阅主题(接收数据)。
应用并不知道在与谁通信,1个订阅主题可以有多个发布器和订阅器。
这种设计模式阻止了锁定的问题(locking issues),在机器人领域非常常见。
为了使这更为高效,通常在总线上只有一个消息,并且不会有队列。
这种发布/订阅机制由微对象请求处理器microobject request broker (uORB)实现。
快速开始这是一个简单但是完整的发布器(publisher) /订阅器(subscriber)组合,发布器发布一个叫做random_integer 的订阅主题,并使用随机的整数更新订阅主题。
订阅器检查并打印这些更新。
topic.h1./* declare the topic */2.ORB_DECLARE(random_integer);3./* define the data structure that will be published where subscribers canseeit */4.struct random_integer_data{5.int r;6.};publisher.c1.#include <topic.h>2./* create topic metadata */3.ORB_DEFINE(random_integer);4./* file handle that will be used for publishing */5.staticint topic_handle;6.int init()7.{8./* generate the initial data for first publication*/9.struct random_integer_data rd={ .r= random(),};10./* advertise the topic and make the initialpublication */11. topic_handle = orb_advertise(ORB_ID(random_integer),&rd);12.}13.int update_topic()14.{15./* generate a new random number forpublication */16.struct random_integer_data rd={ .r= random(),};17./* publish the new data structure */18. orb_publish(ORB_ID(random_integer), topic_handle,&rd);19.}subscriber.c1.#include <topic.h>2./* file handle that will be used forsubscribing */3.staticint topic_handle;4.int init()5.{6./* subscribe to the topic */7. topic_handle = orb_subscribe(ORB_ID(random_integer));8.}9. voidcheck_topic()10.{11.bool updated;12.struct random_integer_data rd;13./* check to see whether the topic has updatedsince the last time we read it */14. orb_check(topic_handle,&updated);15.if(updated){16./* make a local copy of the updated datastructure */17. orb_copy(ORB_ID(random_integer), topic_handle,&rd);18. printf("Random integer is now %d\n", rd.r);19. }20.}发布过程发布过程包含三个独立却相关联的动作:定义订阅主题,通告订阅主题,并且发布更新。
PX4源码开发人员文档(四)——创建后台程序(应用)
在Unix和其他多任务计算机操作系统中,后台程序是指,作为后台进程运行的计算机,而不是由交互用户直接控制。
后台程序概念的主要好处是,后台程序可以直接启动,而不需要将其发送到精确的用户或者shell的后台(然而,这不适用于Nuttx),其状态可以在运行的时候,通过shell查询。
也可以终止。
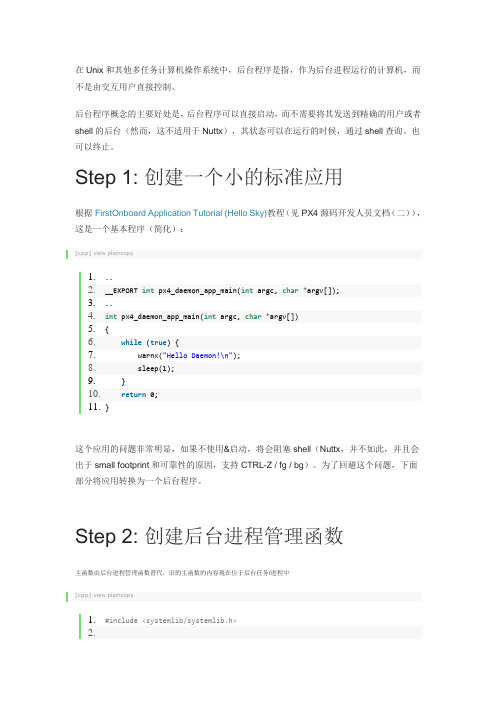
Step 1: 创建一个小的标准应用根据FirstOnboard Application Tutorial (Hello Sky)教程(见PX4源码开发人员文档(二)),这是一个基本程序(简化):[cpp]view plaincopy1...2.__EXPORT int px4_daemon_app_main(int argc, char *argv[]);3...4.int px4_daemon_app_main(int argc, char *argv[])5.{6.while (true) {7. warnx("Hello Daemon!\n");8. sleep(1);9. }10.return 0;11.}这个应用的问题非常明显,如果不使用&启动,将会阻塞shell(Nuttx,并不如此,并且会出于small footprint和可靠性的原因,支持CTRL-Z / fg / bg)。
为了回避这个问题,下面部分将应用转换为一个后台程序。
Step 2: 创建后台进程管理函数主函数由后台进程管理函数替代,旧的主函数的内容现在位于后台任务/进程中[cpp]view plaincopy1.#include <systemlib/systemlib.h>2.3...4.__EXPORT int px4_daemon_app_main(int argc, char *argv[]);5...6.int mavlink_thread_main(int argc, char *argv[]);7...8.int mavlink_thread_main(int argc, char *argv[])9.{10.while (true) {11. warnx("Hello Daemon!\n");12. sleep(1);13.if (thread_should_exit) break;14. }15.16.return 0;17.}18...19.int px4_daemon_app_main(int argc, char *argv[])20.{21.if (argc < 1)22. usage("missing command");23.24.if (!strcmp(argv[1], "start")) {25.26.if (thread_running) {27. warnx("daemon already running\n");28./* this is not an error */29. exit(0);30. }31.32. thread_should_exit = false;33. daemon_task = task_spawn_cmd("daemon",34. SCHED_RR,35. SCHED_PRIORITY_DEFAULT,36. 4096,37. px4_daemon_thread_main,38. (argv) ? (const char **)&argv[2] : (const char **)NULL);39. thread_running = true;40. exit(0);41. }42.43. usage("unrecognized command");44. exit(1);45.}这将会启动一个新的任务,具有4096字节的堆栈,并传递非后台程序的具体指令行选项到后台主函数。
软件体系结构架构设计文档

基于机器学习的分布式系统故障诊断系统架构设计⽂档本⽂档的⽬的是详细地介绍基于机器学习的分布式系统故障诊断系统所包含的需求。
基于机器学习的分布式系统故障诊断系统是⼀个利⽤机器学习和深度学习技术对分布式系统的故障数据进⾏分析的⼯具,旨在帮助⽤⼾准确地识别和分类分布式系统中的故障,并实现分布式系统故障运维的智能化。
为了确保客⼾能够明确了解产品的具体需求,并使开发⼈员能够根据这些需求进⾏设计和编码,我们将在以下部分描述基于机器学习的分布式系统故障诊断系统的功能、性能、⽤⼾界⾯、运⾏环境和外部接⼝。
此外,我们还将详细说明针对⽤⼾操作的各种系统响应。
2.1 需求介绍该项⽬是为满⾜分布式系统故障⾼效、准确诊断的需求⽽开发的。
基于机器学习的分布式系统故障诊断系统不仅可以对分布式系统的故障数据进⾏深⼊的分析,还可以设计出准确的故障诊断模型。
此外,它还为分布式系统故障的智能化运维提供了有效的技术⽀持。
通过本系统,⽤⼾可以实现对分布式系统故障的快速检测和恢复,从⽽降低运维难度,减少⼈⼒资源消耗。
2.2 需求分析2.2.1 ⼀般性需求操作系统适配性:系统应能够适配主流的操作系统,如W indows、L inux等。
性能和可靠性:系统需保证⾼性能运⾏,同时确保在各种故障情况下的可靠性。
可维护性:系统应当有良好的⽂档和代码结构,确保后期可以轻松地进⾏维护和升级。
可扩充性:随着业务的增⻓和技术的更新,系统应具有良好的可扩充性,以满⾜未来的需求。
适应性:系统需能够适应不同的技术和业务场景,以确保其在多种环境下都能够稳定运⾏。
2.2.2 功能性需求2.2.2.1 ⽤⼾需求1 基于机器学习的故障诊断功能故障诊断与分类:⽤⼾需要系统能够准确地诊断和分类分布式系统中的故障。
KPI指标监控:⽤⼾希望在所有节点正常运⾏时,所有KPI指标都在正常范围内。
故障检测:⽤⼾希望系统能够检测到节点的故障,并识别导致KPI指标异常的故障。
故障传播识别:⽤⼾希望系统能够识别故障在分布式系统中的传播情况。
Px4源码框架结构图

PX4自动驾驶仪软件可分为三大部分:实时操作系统、中间件和飞行控制栈。
1.NuttX实时操作系统提供POSIX-style的用户操作环境(如printf(), pthreads,/dev/ttyS1,open(),write(),poll(),ioctl()),进行底层的任务调度。
2.PX4中间件PX4中间件运行于操作系统之上,提供设备驱动和一个微对象请求代理(micro object request broker,uORB)用于驾驶仪上运行的单个任务之间的异步通信。
Px4被3DR开源后,整个代码结构被⼤改,原先的系统被摒弃,进而采用Nuttx,但是核心思想没变-为了简化开发而采用牺牲部分效率的消息传递机制,这是Px4 与ArduPilot 最本质的差别。
3.PX4飞行控制栈飞行控制栈可以使用PX4的控制软件栈,也可以使用其他的控制软件,如APM:Plane、APM:Copter,但必须运行于PX4中间件之上。
此部分又可分为决策导航部分:根据飞行器自身安全状态和接收到的命令,决定工作于什么模式,下一步应该怎么做。
位置姿态估计部分:根据传感器得到自身的位置和姿态信息,此部分算法含金量最高,算法也相当多。
位置姿态控制部分:根据期望位置和姿态设计控制结构,尽可能快、稳的达到期望位置和姿态。
控制器输出部分:mixer和执行器,pwm限幅。
算法在Firmware/src/modules,驱动在Firmware/src/drivers px4原生固件模块列表:系统命令程序mavlink–通过串口发送和接收mavlink信息sdlog2–保存系统日志/飞行数据到SD卡tests–测试系统中的测试程序top–列出当前的进程和CPU负载uORB–微对象请求代理器-分发其他应用程序之间的信息驱动mkblctrl–blctrl电子模块驱动esc_calib–ESC的校准工具fmu–FMU引脚输入输出定义gpio_led–GPIO LED驱动gps–GPS接收器驱动pwm–PWM的更新速率命令sensors–传感器应用px4io–px4io驱动uavcan–uavcan驱动飞行控制的程序飞行安全和导航commander–主要飞行安全状态机navigator–任务,失效保护和RTL导航仪估计姿态和位置attitude_estimator_ekf–基于EKF的姿态估计ekf_att_pos_estimator–基于EKF的姿态和位置估计position_estimator_inav–惯性导航的位置估计multirotor姿态和位置控制器mc_att_control–multirotor姿态控制器mc_pos_control–multirotor位置控制器fixedwing姿态和位置控制器fw_att_control–固定翼飞机的姿态控制fw_pos_control_l1–固定翼位置控制器垂直起降姿态控制器vtol_att_control–垂直起降姿态控制器3.1决策3.1.1 任务决策。
软件架构文档(样例)
4In1 System软件架构文档版本 <1.1>修订文档历史记录目录软件架构文档1.简介1.1目的本文档将从架构方面对系统进行综合概述,其中会使用多种不同的架构视图来描述系统的各个方面。
它用于记录并表述已对系统的架构方面作出的重要决策。
1.2范围本文档用于4In1小组正在开发中的4In1系统。
4n1系统是为ABC汽车4S店设计的业务管理系统,将提供汽车的整车销售、配件销售、售后服务以及信息反馈等功能。
1.3定义、首字母缩写词和缩略语见4In1系统术语表1.4参考资料1. 4In1系统术语表,1.0版,4In1小组2. 4In1系统前景文档,1.1版,4In1小组3. 4In1系统软件需求规约,1.0版,4In1小组4. 4In1系统软件开发计划,1.1版,4In1小组5. 4In1系统初始迭代计划,1.1版,4In1小组6. 4In1系统细化迭代计划,1.0版,4In1小组7. 4In1系统风险列表,1.0版,4In1小组8. RUP的软件架构文档模板2.架构表示方式本文档将通过以下一系列视图来表示4In1系统的软件架构:用例视图、逻辑视图、部署视图。
本文档不包括进程视图和实施视图。
这些视图都是通过PowerDesigner工具建立的UML模型。
3.架构目标和约束1.系统在开发过程中有如下设计约束:开发语言为Java,采用关系型数据库存放数据,采用基于UML的面向对象分析与设计方法进行开发,采用B/S架构。
2.系统应支持100人以上同时访问服务器并支持500人以上同时访问数据库,服务器的响应时间不应该超过5秒。
3.所有用户在保证网络连接的情况下可同时通过局域网和互联网访问系统。
4.系统必须保证数据的安全访问,用户需要通过用户名和密码进行身份认证,同时对数据的访问要进行授权认证。
4.用例视图本章是对软件架构的用例视图的描述。
由于4In1系统的用例数量太多,因此本章只选了部分与架构设计相关的用例。
PX4飞控源码系统框架介绍

PX4飞控源码系统框架介绍⼀、build_px4fmu-v2_default 编译以后⽣成的⽂件:内部主要需要在意的就是topics_temporary_header(所有的任务是要的头⽂件,在创建任务和使⽤数据结构时可以从该处检索);topics_temporary_sources(系统中所有的任务函数)⼆、Cmake 配置⽂件,主要使⽤ nuttx_px4fmu-v2_default.cmake。
该处主要是关于系统使⽤的⽂件的路径配置,在 PX4 系统所有的.CPP 和.C ⽂件都是通过在该处进⾏路径包含的。
在需要⾃⼰创建私有任务或者 sensor 驱动程序时需要添加到该处。
三、mavlink 主要负责和地⾯站QGC通信的协议部分,这部分可以直接调⽤。
分为1.0版本和2.0版本,以后都更新到2.0版本了四、msg uORB manger 的缩写:msg。
该部分主要是 PX4 系统的使⽤的所有的数据结构的集合部分,各种任务和 sensor 驱动中需要获取的 sensor 数据都在此部分,还包含各种运⾏状态的数据结构。
其中需要注意的是该⽂件夹下的 Cmakelists.txt,该⽂档是整个 msg 部分的配置部分,类似第⼆部分的 Cmake 中的配置⽂件⼀样,在开发者创建任务或者 sensor 驱动程序时创建对应的数据结构(***.msg)以后,需要把开发者创建的***.msg 添加到Cmakelists.txt 中,否则编译时识别不到开发者创建的数据结构。
在该部分创建好以后,直接编译可以⾃动⽣成相对应的 C/C++下的标准头⽂件,即在第⼀部分所介绍的 topics_temporary_header,在 PX4 系统的任何⼀个地⽅引⽤所需要的数据结构,都需要把这个头⽂件包含进去。
五、NuttX PX4 所使⽤的操作系统,其类似 UCos,关于 OS 的基本概念以及够不部分不在详述。
六、ROMFS ROM file_system 的简写,内部的 px4fmu_common ⽂件夹中的 init.d 是关于 px4 系统初始上电启动的启动脚本,即⼀系列的启动过程和系统配置。
软件架构设计师教程第4版 pdf

软件架构设计师教程第4版 pdf 标题:软件架构设计师教程第4版 PDF引言概述:软件架构设计师教程第4版是一本广受欢迎的书籍,它为软件架构设计师提供了全面而深入的指导。
本文将从五个大点出发,详细阐述该教程的内容,帮助读者了解该书的价值和重要性。
正文内容:1. 简介软件架构设计师教程第4版(SAD4):1.1 作者简介1.2 书籍概述1.3 目标读者群体2. SAD4的核心概念和原则:2.1 软件架构基础知识2.2 架构设计原则2.3 架构视图和模型2.4 架构决策和评估2.5 架构演化和管理3. SAD4的实践方法和技巧:3.1 需求分析和架构设计3.2 架构风格和模式3.3 架构框架和工具3.4 架构重构和优化3.5 架构文档和沟通4. SAD4的案例研究和实例分析:4.1 典型软件架构案例4.2 架构设计过程分析4.3 架构决策和权衡4.4 架构评估和验证4.5 架构演化和维护5. SAD4的进阶学习和应用:5.1 架构师的职业发展5.2 架构团队的协作与领导5.3 架构教育和认证5.4 架构创新和趋势5.5 架构实践和经验分享总结:软件架构设计师教程第4版是一本全面而深入的指导书籍,它涵盖了软件架构设计的核心概念、原则、方法和技巧。
通过案例研究和实例分析,读者可以深入了解架构设计的实践应用。
此外,该教程还提供了进阶学习和应用的内容,帮助读者在架构设计领域取得更高的职业发展。
无论是初学者还是有经验的架构师,都能从中受益匪浅。
因此,软件架构设计师教程第4版是每位软件架构师必备的学习资料。
软件架构文档

求和
2.2 用例实现 ·游戏设置:分析类包含 SettingFile(用来记录设置)、SettingController(用来控 制设置)、SettingForm(用来显示设置界面)三个类。
·人机对战:分析类包含 PlayForm(用来进行游戏界面显示)、Player(用来表征游戏 玩 家 )、ComputerPlay er( 用 来 表 征 电 脑 )、Boar d( 用 来 记 录 当 前 的 游 戏 界 面 棋 子 分 布 )、 RepFile( 用 来 进 行 游 戏 的 保 存 记 录 ) 、 PlayerController( 用 来 进 行 游 戏 的 控 制 ) 、 IPlayerController(游戏控制接口类)7 个类
1.5 概述 本文档以一系列的视图表示构架,包括用例视图、流程视图、部署视图和实现视图。 这些视图表示为 Rose Model 并使用统一建模语言 (UML)。
2. 用例视图
2.1 用例
关 于 软 件 构 架 用 例 视 图 的 说 明 。对 于 所 选 择 的 场 景 集 和( 或 )作 为 迭 代 焦 点 的 用 例 集 , 用 例 视 图 是 很 重 要 的 输 入 。用 例 视 图 描 述 那 些 代 表 了 某 些 重 要 的 核 心 功 能 的 场 景 集 和 /或用例集。它还要描述那些在构架方面的涉及范围很广(使用了许多构架元素)的 场景集和/或用例集,或者那些强调或阐明了构架的某一具体的细微之处的场景集和 / 或用例集。 ·游戏设置:这个用例允许玩家在进入游戏后可以对游戏的各种选项进行设置。 ·人机对战:这个用例允许玩家在单机的时候可以和电脑 AI 进行五子棋对战。 · 联机对战:这个用例允许玩家连入局域网进行联机双人对战。 ·局域网旁观:这个用例允许观看者加入局域网对战房间观看其他玩家对战。 ·复盘查看:这个用例描述用户通过复盘对下过的棋局进行查看。 ·游戏帮助:这个用例允许用户查看该游戏软件使用帮助。
PX4Pixhawk程序研究笔记

PX4 Pixhawk程序研究笔记编译环境建立参考链接:1、首先确保电脑安装了Java运行环境。
2、下载并安装PX4 Toolchain,链接:3、在开始菜单中选择:PX4 Toolchain -> PX4 Software download来获取一个初始软件设置。
它会在安装路径下(默认为C:\px4)下载如下文件夹:▪px4▪Firmware – PX4 firmware (for all modules), includes MAVLink▪NuttX – The NuttX Real Time Operating System (RTOS)▪libopencm3 – Optional: Open Source Cortex Mx library, used only in the bootloaders▪Bootloader – Optional: Bootloaders, does normally not need to be touched4、配置Eclipse,开始菜单 -> 所有程序–> PX4 Toolchain -> PX4 Eclipse默认的workspace路径是刚好正确的:New → Make with Existing Code:选择Cross GCC,并指定文件夹位置为:“c:\px4\Firmware”。
打开右边的“Make Target” 并点击“New Make Target”:你应当创建如下Targets:▪archives– builds the NuttX OS▪all– builds the autopilot software (depends on archives)▪distclean– cleans everything, including the NuttX build▪clean– cleans only the application (autopilot) part▪upload px4fmu-v1_default– uploads to PX4FMU v1.x boards▪upload px4fmu-v2_default– uploads to PX4FMU v2.x boards编译方法:参考链接:1、双击distclean;2、双击archives;3、双击all;4、双击upload px4fmu-v1_default(PX4)或upload px4fmu-v2_default(Pixhawk)来上传固件。
PX4源码开发人员文档(一)——软件架构

软件架构PX4 在广播消息网络,按照一组节点(nodes )的形式进行组织,网络之间使用像如“姿态”和“位置”之类的语义通道来传递系统状态。
软件的堆栈结构主要分为四层:•应用程序接口:提供给app开发人员,使开发人员可以使用ROS或者DroneAPI。
这一接口设计尽可能简洁和扁平,并尽量多的隐藏复杂性。
•应用框架:这是一组核心缺省应用程序(节点),运行核心的飞行控制。
•函数库:这一层包括针对机器核心操作的所有系统函数库和功能•操作系统:最后一层,提供硬件驱动、网络通信、UAVCAN和故障安全(failsafe)系统。
部进程通信(Inter ProcessCommunication,IPC)PX4 平台的封装提供了跨平台的无锁发布-订阅模式( publish–subscribepattern) 对象请求处理器。
取决于平台/操作系统,完成这个的后端可能是uORB,或者Linux上的ROS / DDS (data delivery service)。
封装可扩展,也可作为消息系统提供支持,比如ØMQ。
所有这些后端的共同特点是,它们都允许发送数据到一个像如“位置”这样的语义订阅主题(topic),并使多个接收器跨进程的收到这一数据。
IPC性能发布(Publication)到订阅(subscription)之间的延迟:•uORB: 23 us 168 MHz STM32F4•ROS: TBD•ROS2 / DDS: 185 us 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)•ZeroMQ: 170 us 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)安全和保护模型飞行核心与主要应用级处理过程隔离,以确保独立于高层级系统状态的机器核心操作,保持稳定。
代码框架结构文档-概述说明以及解释

代码框架结构文档-概述说明以及解释1.引言1.1 概述代码框架结构文档是一份旨在介绍代码框架的概念、设计原则、主要组成部分以及应用意义的文档。
在软件开发中,代码框架扮演着重要的角色,它是一种提供基本结构和功能的代码库,可以帮助开发人员快速搭建和开发应用程序。
本文将围绕代码框架的概念展开讨论,首先简要介绍代码框架的定义和作用,然后探讨设计代码框架的原则以及其主要组成部分。
通过全面了解代码框架的结构和设计,开发人员可以更好地理解和利用代码框架,提高开发效率和代码质量。
总的来说,本文旨在帮助读者深入了解代码框架的重要性和作用,以及如何合理设计和应用代码框架,从而提升软件开发的效率和质量。
文章结构部分包括对整篇文章的组织和安排的描述。
在代码框架结构文档中,我们将按照以下方式组织文章的内容:1. 引言部分:1.1 概述:介绍本文主题,即代码框架结构文档。
1.2 文章结构:本部分,对整篇文章的结构和组织进行说明。
1.3 目的:说明本文撰写的目的,以及对读者有何帮助。
2. 正文部分:2.1 代码框架概念:详细介绍代码框架的概念,包括定义、特点和作用。
2.2 设计原则:探讨设计代码框架时应遵循的原则,以确保其高效性和可维护性。
2.3 主要组成部分:介绍代码框架结构中的主要组成部分,包括模块、接口、类等。
3. 结论部分:3.1 总结:总结本文讨论的内容,强调代码框架结构的重要性。
3.2 应用意义:探讨代码框架结构在实际开发中的应用意义,以及对开发效率的影响。
3.3 展望:展望未来代码框架结构的发展趋势,以及可能的进一步研究方向。
通过以上结构,读者可以清晰地了解本文的组织框架,帮助他们更好地理解和利用文章中的内容。
1.3 目的本文的目的是为了提供一个清晰的框架结构文档,帮助读者了解代码框架的设计原则、主要组成部分以及应用意义。
通过阐述代码框架的概念和重要性,读者可以更好地理解如何构建和维护一个高效的代码框架,提高代码的可维护性、可扩展性和可重用性。
PX4源码开发人员文档(二)——Hello Sky

前提∙用UART1连接PX4FMU和计算机∙安装PX4Toolchain∙注册Github账户Step 1: 准备源码文件为了方便管理代码,可以使用GIT 版本控制系统,在GitHub上fork和更新源码。
不注册GitHub的话,可以在PX4 console中输入下面的命令:1.git clone https:///PX4/Firmware更新the git submodules,在PX4 console上输入:1.cd Firmware2.git submodule init3.git submodule update文件准本完成,编译操作系统,输入:1.make archives当submodules或者NuttX 配置改变,重新编译。
在Firmware/src/examples/ 新建目录px4_simple_app,在目录中新建文件module.mk并添加如下内容:1.MODULE_COMMAND = px4_simple_app2.SRCS = px4_simple_app.cStep 2: 最小程序在px4_simple_app目录下创建px4_simple_app.c文件。
遵循PX4 CodingStyle编辑如下代码:1./**2. * @file px4_simple_app.c3. * Minimal application example for PX4 autopilot.4. */5.6.#include <nuttx/config.h>7.#include <stdio.h>8.#include <errno.h>9.10.__EXPORT int px4_simple_app_main(int argc, char *argv[]);11.12.int px4_simple_app_main(int argc, char *argv[])13.{14. printf("Hello Sky!\n");15.return OK;16.}Step 3: 在NuttShell中注册应用并build完成了应用并可以运行,但是没有在NuttShell 命令中注册。
手把手教你在Windows7建立PX4的Eclipse开发环境 - 知乎专栏
手把手教你在Windows7建立PX4的Eclipse开发 环境
常青藤 · 7 个月前
ቤተ መጻሕፍቲ ባይዱ
手把手教你在Windows系统建立PX4的Eclipse开发环境
常青藤 转载注明出处
写在前面
这几年无人机和开源飞控发展很快,Pixhawk是一款性能和可扩展性都很不错的硬件飞控开发平 台。PX4是这个硬件平台搭载的开源软件,近几年的更新一直很活跃,架构越来越完善,功能越 来越多。而且这个软件也不限于在Pixhawk上使用,对其他平台比如树莓派等的支持也越来越多。 针对众多初次进入这个领域的开发者可能会遇到的问题,笔者在官方文档和网上众多教程的基础 上,针对性的做了一些整理和总结,如有侵犯您的权益,请联系修改。 本文主要介绍了在Windows系统下配置PX4的eclipse开发环境的方法,文中主要内容来自网上分 享,针对实际情况做了一些整理。按照这个步骤,最终可得到一个包含所有源码的PX4开发环 境。
https:///p/25198079
8/19
2017/9/17
手把手教你在Windows7建立PX4的Eclipse开发环境 知乎专栏
这是因为gccarmnoneeabi版本不对,需要将armnoneeabigcc 4.7.4换成4.8.4,下载4.8.4版本 的压缩文件。目前GCC可能有更高的版本,当4.8.4不可用时换成4.9.4或5.4.3。注意要下 载“.ZIP”文件。 官网地址: GNU ARM Embedded Toolchain | Downloads – ARM Developer 官网不好找老版本,转到其他网站:GNU ARM Embedded Toolchain 或者直接点击下面链接下载: /gccarme... 下载后解压文件如图。
pixhawk源码分析

第二部分: 学习 sketch 例程代码
Sketch,是指使用.pde 文件编写的主程序 Sketch 代码的几个特点: 1、 pde 文件包含很多 includes;其中 include 为 pde 文件转变为 C++文件后,提供必要的库
引用支持。 2、 定义了 hal 引用声明;在 Sketch 例程中 hal 引用声明定义如下:
3、 其他库 AP_Mount,AP_Camera, AP_Relay:相机安装控制库,相机快门控制库 AP_Mission: 从 eeprom(电可擦只读存储器)存储/读取飞行指令相关库 AP_Buffer:惯性导航时所用到的一个简单的堆栈(FIFO,先进先出)缓冲区
第七部分:姿态控制预览:
这种有手动飞行模式,诸如自稳模式(Stabilize Mode)、特技模式(Acro Mode)等
作为程序的起点,在 AP_HAL_MAIN()里,就正式调用了 hal.init()初始化代码 程序的执行过程为:程序起点 AP_HAL_MAIN()->hal.init()->hal.main_loop()->sketch 中的 setup()和 loop()。 其中 loop()函数;usage()函数;init()函数定义在 HAL_PX4_Class.cpp 中
软件架构设计文档模板

<Project Name>Software Architecture DocumentVersion<1.0>Revision HistoryDate Version Description Author < yyyy-mm-dd > <x.x> <details> <name>目录1. 文档简介 41.1 文档目的 41.2 文档范围 41.3 定义、缩写词和缩略语 41.4 参考资料 42. 架构描述方式 42.1 架构视图阅读指南 42.2 图表与模型阅读指南 53. 架构设计目标 53.1 关键功能 53.2 关键质量属性 53.3 业务需求和约束因素 54. 架构设计原则 64.1 架构设计原则 64.2 备选架构设计方案及被否原因 64.3 架构设计对后续工作的限制(详设,部署等) 65. 逻辑架构视图 65.1 职责划分与职责确定 75.2 接口设计与协作机制 85.3 重要设计包 106. 开发架构视图 116.1 Project划分 116.2 Project 1 116.2.1 Project目录结构指导 126.2.2 程序单元组织 126.2.3 框架与应用之间的关系(可选) 126.3 Project 2 (13)6.4 Project n (13)7. 运行架构视图 137.1 控制流组织 137.2 控制流的创建、销毁、通信 137.3 加锁设计 148. 物理架构视图 148.1 物理拓扑 148.2 软件到硬件的映射 158.3 优化部署 169. 数据架构视图 169.1 持久化机制的选择 169.2 持久化存储方案 179.3 数据同步与复制策略 1710. 关键质量属性的设计原理 171.文档简介[帮助读者对本文档建立基本印象,并为阅读后续内容扫清障碍。
]1.1文档目的[文档目的,非项目目的。
PX4的无人机飞控应用开发

PX4/PixHawk无人机飞控应用开发1、PX4/Pixhawk飞控软件架构简介PX4是目前最流行的开源飞控板之一。
PX4的软件系统实际上就是一个firmware,其核心OS为NuttX实时ARM系统。
其固件同时附带了一系列工具集、系统驱动/模块与外围软件接口层,所有这些软件(包括用户自定义的飞控软件)随OS内核一起,统一编译为固件形式,然后上传到飞控板中,从而实现对飞控板的软件配置。
PX4配套的软件架构主要分为4层。
理解其软件架构是开发用户自定义飞控应用软件的基础。
a) API层:这个好理解。
b) 框架层:包含了操作基础飞行控制的默认程序集(节点)c) 系统库:包含了所有的系统库和基本交通控制的函数d) OS内核:提供硬件驱动程序、网络、UAVCAN和故障安全系统上述是个面向PX4系统实现者的相对具体的软件架构。
实际上还有另外一种面向PX4自定义飞控应用开发者的高层软件架构描述,相对抽象,但更简单,就是整个PX4的软件从整体上分为2层:a) PX4 flight stack:一系列自治无人机自动控制算法的集合b) PX4 Middleware:一系列针对无人机控制器、传感器等物理设备的驱动及底层通信、调度等机制的集合PX4软件架构中,最有意思的一点在于整个架构的抽象性(多态性)。
即,为了最大限度保障飞控算法代码的重用性,其将飞控逻辑与具体的底层控制器指令实现进行了解耦合。
一套高层飞控算法(如autopilot、GeoFence等)在不做显著修改的情况下,能够适用于固定翼、直升机、多旋翼等多种机型的控制场合,这时候就体现出PX4飞控的威力来了:在用户程序写好之后,如果需要替换无人机机架的话,仅需简单的修改一下机架配置参数即可,高层的用户自定义飞控应用几乎无需修改。
理解上述初衷至关重要。
有很多搞自动化出身、没太多软件经验的朋友倾向于直接使用底层控制协议来控制飞控板,但实际上PX4架构已经在更高的抽象层面上提供了更好的选择,无论是代码维护成本、开发效率、硬件兼容性都能显著高于前者。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
软件架构
PX4 在广播消息网络,按照一组节点(nodes )的形式进行组织,网络之间使用像如“姿态”和“位置”之类的语义通道来传递系统状态。
软件的堆栈结构主要分为四层:
•应用程序接口:提供给app开发人员,使开发人员可以使用ROS或者DroneAPI。
这一接口设计尽可能简洁和扁平,并尽量多的隐藏复杂性。
•应用框架:这是一组核心缺省应用程序(节点),运行核心的飞行控制。
•函数库:这一层包括针对机器核心操作的所有系统函数库和功能
•操作系统:最后一层,提供硬件驱动、网络通信、UAVCAN和故障安全(failsafe)系统。
部进程通信(Inter ProcessCommunication,IPC)
PX4 平台的封装提供了跨平台的无锁发布-订阅模式( publish–subscribe
pattern) 对象请求处理器。
取决于平台/操作系统,完成这个的后端可能是uORB,或者
Linux上的ROS / DDS (data delivery service)。
封装可扩展,也可作为消息系统提供支持,比如ØMQ。
所有这些后端的共同特点是,它们都允许发送数据到一个像如“位置”这样的语义订阅主题(topic),并使多个接收器跨进程的收到这一数据。
IPC性能
发布(Publication)到订阅(subscription)之间的延迟:
•uORB: 23 us 168 MHz STM32F4
•ROS: TBD
•ROS2 / DDS: 185 us 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)
•ZeroMQ: 170 us 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)
安全和保护模型
飞行核心与主要应用级处理过程隔离,以确保独立于高层级系统状态的机器核心操作,保持稳定。
PX4应用程序框架
PX4应用程序框架在所有平台上代码兼容,(比如Pixhawk / NuttX,又比如,SnapDragon / Linux),独立并将中间设备作为传输层。
节点句柄(Node Handle)
节点句柄是每一个连接到中间设备的发布器(publisher)或者订阅器(subscriber)的核心数据结构(一个节点可以同时是发布器和订阅器)。
一个节点是一个逻辑单元,每一个进程都可以有多于一个的节点(虽然这并不是典型的形式)。
1.px4::NodeHandle n();
数据结构
对于所有相关的中间设备实现,PX4根据储存在“msg”中的定义文件自动生成据结构。
发布(publication)
通过使用节点句柄通告(advertise)订阅主题(topic)来创建一个新的发布(publication)。
注意这个模板,是订阅主题的数据结构。
1.px4::Publisher<px4::px4_rc_channels>* rc_channels_pub = n.advertise<px4_rc_channe
ls>()
从这个指向rc_channels_pub 的句柄的指针,可以用于发布数据
1.px4_rc_channels rc_channels_msg;
2.rc_channels_msg.data().timestamp_last_valid= px4::get_time_micros();
3._rc_channels_pub->publish(rc_channels_msg);
订阅(Subscription)
通过订阅一个订阅主题创建一个新的发布。
注意模板,是订阅主题的数据结构。
使用订阅共有三个选择:
1. 使用订阅主题的句柄,进行手动复制操作。
2. 作为函数的回调(callback),在订阅主题更新时,函数被调用。
3. 作为类方法的回调(相当于函数,但是是C++类型的)
单纯订阅
除非手动调用复制方法,否则数据不会被复制。
1.unsigned min_interval =500;
2._sub_rc_chan = _n.subscribe<px4_rc_channels>(min_interval);
函数回调
每次订阅主题更新,则'rc_channels_callback_function'被调用。
[cpp]view plaincopy
1.unsigned min_interval =500;
2._n.subscribe<px4_rc_channels>(rc_channels_callback_function, min_interval);
类方法回调
相当于前面函数的例子。
1._n.subscribe<px4_rc_channels>(&SubscriberExample::rc_channels_callback, this, min_
interval);
混合系统
为了解决更高级别的挑战,比如基于视觉的避障或者复杂控制问题,一个运行嵌入式Linux 的伴随计算机将非常有用。
集成ROS
PX4可以通过两种不同的API与ROS整合到一起:或者自然地将每一个应用作为ROS节点,或者通过mavros在嵌入式自驾仪上唯一地运行
DroneAPI
DroneAPI是一个高级应用程序接口,类似于一个为远程过程调用(RPC)提供语言绑定的函数库。
从本质上讲,它是面向告诉无人机去哪里或做什么,而不是核心的机器人通讯/ API 的一部分。