水上救援机器人
新型水上急救机器人设计与研究

新型水上急救机器人设计与研究随着人们对生命安全的重视,水上急救事故的频繁发生引起了人们的广泛关注。
目前,机器人技术已经成为了解决水上急救事故的有效手段。
本文设计并研究一种新型水上急救机器人,能够实现对水上急救事故的救援。
一、机器人设计该水上急救机器人由机器人主体、摄像头和螺旋桨组成。
机器人主体采用结实的防水材料制成,能够在水中浮起;摄像头可以拍摄周围环境,为机器人主体提供方向指引;螺旋桨则提供动力,能够向前快速移动。
二、机器人功能1、搜索和识别机器人通过摄像头搜索水面上的人员、船只等,使用智能识别技术对其进行分析,进行分类和标记,并建立相关的数据。
2、求救响应当机器人搜索并找到水上急救事故的人员时,机器人会自动响应,向急救人员发出声音报警并尽快移动到目标位置。
3、传输图像和数据当机器人找到水上急救事故的人员后,机器人会自动拍摄并传输图像和数据到与机器人相连接的电脑或手机设备上,以便进一步分析和处理。
4、自主导航该机器人拥有自主导航功能,能够根据周围环境和自身目的地进行移动,检测水中的障碍物并自动避开。
5、紧急救援机器人主体上配有特殊装置,能够紧急救援水上急救事故中的人员。
同时,机器人还可以向急救人员发出声音提示,并提供相关救援设备。
三、机器人实现原理机器人实现原理主要涉及机器人搜索人员的算法以及机器人自主导航算法。
关于搜索算法,可以采用深度学习算法,根据图像和声音数据进行识别和搜索水上急救事故的人员和船只。
在这个算法中,要学习使用图片和声音识别技术。
自主导航算法主要涉及机器人自动避开障碍物的算法。
在这个算法中,使用遗传算法和粒子群优化算法提高机器人自动避开障碍物的能力。
四、机器人测试及应用前景该机器人设计测试表明,机器人具有良好的水上移动能力,能够快速定位水上急救事故的人员,收集有效图像和声音数据,完成相关救援工作。
该机器人的应用前景非常广泛。
它可以应用于航运、渔业、旅游等场合中,为人们提供安全保障。
新型水上急救机器人设计与研究

新型水上急救机器人设计与研究
随着社会的发展,水上事故和水上救援变得越来越常见。
为了提高水上急救的效率和准确性,我们设计了一种新型水上急救机器人。
下面是关于这种机器人的设计与研究的描述。
我们的水上急救机器人采用了先进的无人驾驶技术。
机器人配备了一套高精度的定位和导航系统,可以根据事故发生地点快速定位并自主导航到达事故现场。
这样可以节省宝贵的时间,并确保机器人快速到达事故现场,进行紧急救援。
机器人的外观和形状也经过精心设计。
机器人采用了流线型的外观,以提高其在水上的机动性和稳定性。
机器人的形状也经过优化,使其能够轻松穿越复杂的水域环境,并适应不同的救援任务。
机器人还配备了多个功能模块,包括船上急救设备、水上搜索设备和通信设备等。
船上急救设备包括医疗器械、急救药物和防护用品等,可以为事故中的人员提供及时的急救救助。
水上搜索设备包括声纳和摄像头等,可以帮助机器人及时探测和发现被困的人员。
通信设备可以与指挥中心进行实时的通信,以便及时了解救援情况和调度其他救援资源。
机器人的操作控制系统也是我们研究的重点。
机器人配备了先进的人机交互界面和智能决策系统,可以实时监测和分析救援现场的情况,并提供相应的操作指令。
机器人还可以根据事故的严重程度和需要救援的人员数量,自主决策救援策略和行动计划。
我们设计的新型水上急救机器人具有先进的技术和功能模块,可以提高水上急救的效率和准确性。
我们相信,通过这种机器人的应用,可以在水上救援中发挥重要的作用,挽救更多的生命。
新型水上急救机器人设计与研究
新型水上急救机器人设计与研究作者:丛高翔张宏宇马天洋樊雪松秦峰来源:《中国科技纵横》2019年第24期摘; 要:自古至今,人类生存环境充斥着洪水海啸等自然灾害,水上灾难也一直威胁着人类的生命和财产安全,如今的水上灾难遍布湖泊、河流,甚至海滨浴场、游泳池场地。
严重影响了我们正常的生活,据世界卫生组织数据显示,2015年全世界不完全统计有37.2萬人溺水身亡,使“溺水”成为全球一个主要的公共卫生问题。
但传统的溺水救援以低效、高代价的人工救援为主。
尽管这些年科学技术取得了飞速发展,目前市场上并没有水上自动救援智能机器人,本文以一种水上多功能追踪预警播报装置的远程控制方式,使其迅速且稳定的运送救生装备至所需救援地点,完成救援任务。
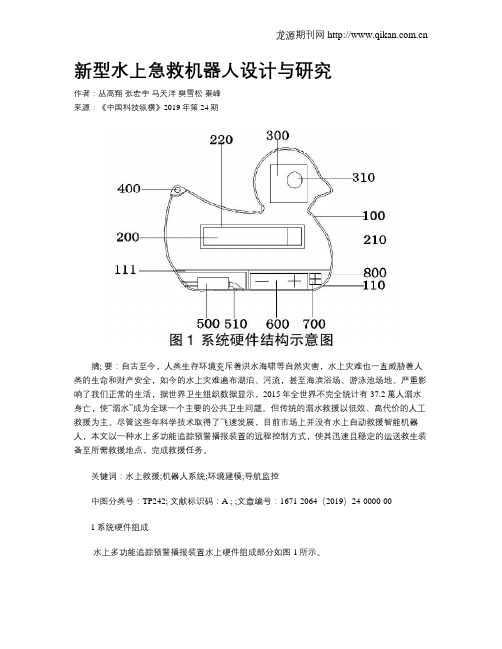
关键词:水上救援;机器人系统;环境建模;导航监控中图分类号:TP242; 文献标识码:A ; ;文章编号:1671-2064(2019)24-0000-001系统硬件组成水上多功能追踪预警播报装置水上硬件组成部分如图1所示。
水上多功能追踪预警播报装置的基本结构,其特征在于,包括外壳(100)、智能设备主板(200)、超声波避障传感器(300)、警报装置(400)、喷水推进器(500)、电池(600)、水压传感器(700)、温度传感器(800),所述外壳(100)的底部通过密封胶(140)固定安装在底部壳体(100)的顶部,所述外壳(100)内壁固定安装所述智能设备主板(200),所述外壳(100)顶部设有顶部壳体(120),所述顶部壳体(120)内壁固定安装所述超声波避障传感器(300),所述外壳(100)顶部左端设有尾部壳体(130),所述尾部壳体(130)内壁固定安装所述警报装置(400),所述底部壳体(110)内壁顶部固定安装隔板(111),所述底部壳体(110)内壁底部左端固定安装所述喷水推进器(500),所述底部壳体(110)内壁底部右端固定安装所述电池(600),所述电池(600)右端固定安装水压传感器(700),所述水压传感器(700)右端固定安装温度传感器(800)。
科技实践活动成果小学

一、前言科技是第一生产力,创新是引领发展的第一动力。
为了培养小学生的创新精神和实践能力,提高他们的科学素养,我国教育部高度重视科技实践活动。
近年来,全国各地的小学纷纷开展了形式多样的科技实践活动,取得了丰硕的成果。
本文将介绍一些小学科技实践活动的成果,以展示我国科技教育的蓬勃发展。
二、小学科技实践活动成果展示1. 创意机器人比赛近年来,创意机器人比赛在我国小学生中逐渐兴起。
通过参加比赛,学生们不仅锻炼了动手能力,还培养了团队合作精神。
以下是一些优秀作品:(1)智能垃圾分类机器人:该机器人能识别垃圾种类,将可回收垃圾、有害垃圾、厨余垃圾等进行分类处理。
(2)水上救援机器人:该机器人能在水中快速移动,用于水上救援任务。
(3)无人驾驶小车:该小车能自动规划路线,实现无人驾驶。
2. 科普知识竞赛科普知识竞赛是检验小学生科学素养的重要手段。
以下是一些优秀选手的竞赛成果:(1)小学生科学知识达人:该选手在比赛中表现出色,获得了科普知识竞赛冠军。
(2)小小发明家:该选手凭借自己的创意,发明了一种新型环保产品,获得了评委的一致好评。
3. 3D打印技术应用3D打印技术在教育领域的应用越来越广泛。
以下是一些小学3D打印技术的应用成果:(1)3D打印创意作品:学生们利用3D打印技术,创作出各种创意作品,如3D打印模型、3D打印玩具等。
(2)3D打印辅助教学:教师利用3D打印技术,将抽象的物理、化学知识直观地呈现在学生面前,提高了教学效果。
4. 航模比赛航模比赛是小学生科技实践活动的重要组成部分。
以下是一些优秀航模作品的展示:(1)遥控飞机:该飞机在比赛中表现稳定,赢得了评委们的青睐。
(2)无人机表演:学生们利用无人机进行表演,展示了我国航空科技的进步。
5. 低碳环保实践低碳环保是当今社会的重要议题。
以下是一些小学低碳环保实践活动的成果:(1)垃圾分类宣传活动:学生们通过宣传垃圾分类知识,提高了大家的环保意识。
(2)低碳出行活动:学生们积极参与低碳出行活动,如步行、骑自行车等,为环保事业贡献力量。
水上自动救援智能机器人

总609期第4期2017年4月河南科技Henan Science and Technology 水上自动救援智能机器人李一鸣1杨中原2王冰冰3(1.郑州大学物理工程学院,河南郑州450000;2.郑州大学机械工程学院,河南郑州450000;3.郑州大学信息工程学院,河南郑州450000)摘要:据世界卫生组织的实况报道,2015年全世界不完全统计有37.2万人死于溺水,使溺水成为全球一个主要的公共卫生问题。
但传统的溺水救援以低效、高代价的人工救援为主,目前市场上并没有水上自动救援智能机器人。
本文详细介绍水上自动救援智能机器人,此机器人填补了自动救援史的空白。
关键词:溺水;自动救援;机器人中图分类号:TP242文献标识码:A 文章编号:1003-5168(2017)04-0106-02Automatic Rescue Intelligent Robot on WaterLi Yiming 1Yang Zhongyuan 2Wang Bingbing 3(1.School of Physics Engineering ,Zhengzhou University ,Zhengzhou Henan 450000;2.School of Mechanical Engineering ,Zhengzhou University ,Zhengzhou Henan 4500000;3.College of Information Engineering ,Zhengzhou University ,ZhengzhouHenan 450000)Abstract:According to the WHO report,in 2015,372thousand people died from drowning in the world,which makes drowning a major public health problem in the world.However,the traditional rescue of drowning is mainly based onartificial rescuewith low efficiency,high cost,and there is no such intelligent rescue robot on the water.This paper in⁃troduced in detail the automatic rescue robot on water,which fills the blank of the automatic rescue history.Keywords:drowning ;automatic rescue ;robot 1水上自动救援智能机器人简介水上自动救援智能机器人由监测主体、无人自动巡航搜救船、救生圈及接收端APP 四部分组成。
无人机应用知识:无人机在水上救援、救生衣、潜水潜艇和水底机器人中的应用

无人机应用知识:无人机在水上救援、救生衣、潜水潜艇和水底机器人中的应用随着科技的不断发展,无人机的应用领域越来越广泛,其中水上救援、救生衣、潜水潜艇和水底机器人是无人机应用的重要方向。
这些应用领域的出现,不仅为救援行业带来了全新的技术装备,也为水下勘探和科学研究提供了更多可能。
本文将详细介绍无人机在水上救援、救生衣、潜水潜艇和水底机器人中的应用。
一、无人机在水上救援中的应用水上救援是救援行业中非常重要的一部分,一直以来都是一项高风险的工作。
然而,由于无人机的出现,水上救援变得更加安全和高效。
无人机配合摄像头、声纳、热成像仪等各种传感器,可以迅速地发现溺水者并实现精确定位,从而在最短的时间内为他们提供救援。
而且,在夜间等恶劣环境下也能有效工作。
二、无人机在救生衣中的应用救生衣是实现溺水者的最重要的装备之一。
如果事先装备好了智能救生衣,那么当溺水者失去意识或者无法自救的时候,救生衣将会起到很大的作用。
现在的救生衣一般都配备了一些小型传感器,可以测量溺水者的体温、呼吸和移动状况,而无人机可以用来监测这些传感器所测量到的数据,并在救援人员到达之前提前向救援人员报告溺水者的情况。
此外,无人机还可以向溺水者发送安全提示。
三、无人机在潜水潜艇中的应用潜水潜艇是一种潜行在水下的特种装备,被广泛应用于救援任务、海洋资源开发等。
随着无人机技术的不断发展,许多先进的无人机正在被用于潜水潜艇的监测和控制。
无人机可以帮助潜水员进入潜艇、监听和控制潜艇的一系列操作,从而避免了潜水员承受水下巨大的压力和危险。
四、无人机在水底机器人中的应用水底机器人是一种看上去像是小型潜水艇的装备,广泛应用于海底资源开发和水下勘探等领域。
在这些任务中,水底机器人被用于收集和传输数据、进行水下工作和搜寻失踪物品。
而对于无人机来说,它可以用遥感硬件对水面上方的目标进行实时监测,以便掌握海况信息,使无人机更加高效地实现水下工作。
总之,随着无人机技术和应用的不断发展,越来越多的应用场景被发掘出来。
r1水上救援机器人说明书

r1水上救援机器人说明书一、引言随着水上救援的需求不断增加,传统的救援方式已经无法满足迅速、高效的救援要求。
为了提高救援行动的效率和安全性,我们设计了一款名为r1的水上救援机器人。
本说明书将详细介绍r1机器人的功能特点、使用方法和注意事项。
二、r1机器人的功能特点2.1 抗风浪能力强•采用先进的液压控制系统,能够稳定在风浪较大的水面工作。
•设有自动调节平衡系统,使得机器人在不平稳的水面上保持平衡。
2.2 快速响应能力•配备了强大的动力系统,可迅速前往事故现场,并迅速启动救援行动。
•机器人配备GPS导航系统,能够在最短时间内找到事故发生地点。
2.3 多功能救援系统•前装有机械手臂,可实现抓取、拖拽等操作,帮助落水者上岸或辅助其他救援任务。
•机器人配备了红外线热成像仪、可见光摄像机和声纳等多种传感器,能够在黑暗、浑浊的水面进行搜索和救援工作。
2.4 远程操作与自主导航•支持遥控器操控,能够通过遥控器对机器人进行远程操控和指挥。
•内置智能识别系统,能够自主判断救援任务优先级,根据具体情况进行决策和行动。
三、使用方法3.1 准备工作1.检查机器人的电量是否充足,保证机器人能够正常运行。
2.安装并连接遥控器与机器人,确保遥控器与机器人的信号稳定。
3.2 救援操作1.启动机器人,确保各个系统正常运行。
2.通过遥控器操控机器人的移动和操作。
3.当发生水上事故时,迅速将机器人送至事故现场。
4.利用机械手臂可进行抓取、拖拽等操作,将落水者或其他救援物品送至安全地带。
5.根据实际情况选择使用红外线热成像仪、可见光摄像机和声纳等传感器进行搜索和救援工作。
6.在救援行动结束后,及时对机器人进行清洁和维护,以保证下一次救援行动的顺利进行。
四、注意事项4.1 安全注意事项•在操作机器人时,请确保操作人员具备必要的水上救援知识和技能。
•请勿将机器人用于非法用途或危险区域。
4.2 维护与保养•请定期对机器人进行检查和维护,确保各个部件的正常运行。
水上机器人的用途和功能
水上机器人的用途和功能
水上机器人的用途和功能包括:
1.海底资源勘探:通过水下机器人,可以进行深海勘探和收集海底物质,如矿物、油气等。
2.海洋科学研究:通过水上机器人,可以进行海洋认知和海洋生态研究,探索海洋环境、海洋生物等。
3.海上巡逻和监测:通过水上机器人,可以进行海上巡逻、监测和搜索救援等任务,如打击海盗、打捞失事船只等。
4.海上运输和物流:通过水上机器人,可以进行海上物流运输、港口管理和船只搬运等任务,提高海运效率和安全性。
5.海洋教育和娱乐:通过水上机器人,可以进行海洋科学教育和海洋游乐活动,如水下拍摄、潜水、海底探险等。
6.海上军事和国防:通过水上机器人,可以进行海上监视、侦察、侦击和攻击等任务,加强国家安全和防御能力。
新型水上救援机器人设计研究

Ab ta t sr c :Th e in b c go n ed sg a k r u d,me h n c lsr cu e o kn rn i l n p l ain s o e a o tNo e ae c a ia tu tr ,w r ig p icpe a d a pi t c p b u v lW tr c o
o h s eet g o b s p dI, moinwt y1miam0 e n f a ersti r o u t e : t i d f c I v me l p nf r bi oo o h a
piivs 【 ] P edns f h IE S ltrai a r te mi C / meeig / o te E UR J ue t n n o
B s d R s u s R b t r n r d c d a e e c e o o c ito u e .Au o tc c n r l n n a o to r o i e y u i g a v n e s n o sS a t ma i o to d ma u le n r la e c mb n d b s n d a c e s r .o a i p o i e v r b e g a a t e a e u iy f rp o l o a e b d u l i g a e sd rn t t ru t r v d st o a l u r n e t c rt o e p e wh r o y b i n ts a i e o a a o i m. a s d
水上救援机器人的设计

收稿日期:2019-09-02水上救援机器人的设计杨健玮,龚椿彭,姜逸川,潘伟文,何伟锋(东莞理工学院机械工程学院,广东东莞523808)摘要:随着城市化进展速度加快,景区公园中湖泊、河道等水域存在的行人落水问题需要得到解决。
介绍一种能够在水中自动巡航以及遥控的救援机器人,采用嵌入式主控板作为系统核心,保证较高的动态性能,电源控制模块为系统各部分供电,通过汽油发动机驱动救援机器人前后移动,舵机控制转动方向。
系统无线通信与测距模块完成无线定位功能及信号反馈功能,从而让机器人实现自动或者手动控制救援工作。
该机器人在系统测试和实际试验后具有一定的可行性,满足应急性安全救援要求,为城市景区公园增添一分安全保障。
关键词:救援;机器人;嵌入式;自动中图分类号:TP24文献标志码:A文章编号:1009-9492(2020)03-0028-02A Design of Water Rescue RobotYANG Jianwei ,GONG Chunpeng ,JIANG Yichuan ,PAN Weiwen ,HE Weifeng(Dongguan University of Technology ,School of Mechanical Engineering ,Dongguan ,Guangdong 523808,China )Abstract:With the acceleration of urbanization ,the problem of pedestrian falling in lakes and other waters in the construction of scenic parks needs to besolved.A rescue robot which can cruise automatically in water and controlled by remote control was introduced.The embedded main control board was used as the core of the system to ensure high dynamic performance.The power control module supplied power to each part of the system.The rescue robot was driven by gasoline engine to move forward and backward ,and the rotation direction was controlled by the steering gear.The wireless positioning function and signal feedback function were completed by wireless communication and ranging module of the system ,so that the robot can control the rescue work automatically or manually.The robot has certain feasibility after the system test and the actual test ,meets the timely and safe rescue request ,and adds a safety guarantee for the urban scenic park.Key words:rescue ;robot ;flushbonading ;automationDOI:10.3969/j.issn.1009-9492.2020.03.011第49卷第03期Vol.49No.03机电工程技术MECHANICAL &ELECTRICAL ENGINEERING TECHNOLOGY杨健玮,龚椿彭,姜逸川,等.水上救援机器人的设计[J ].机电工程技术,2020,49(03):28-29.0引言在如今的城市景区公园建设中,大多数情况下都有湖畔区域的建设,为了保证游客的人身安全,湖畔边缘都尽可能设置一定高度的安全围栏。
智能水面搜救机器人的设计方案_精选精选
智能水面搜救机器人的设计方案温馨提示:本文是笔者精心整理编制而成,有很强的的实用性和参考性,下载完成后可以直接编辑,并根据自己的需求进行修改套用。
智能水面搜救机器人的设计方案本文关键词:搜救, 设计方案, 机器人, 水面, 智能智能水面搜救机器人的设计方案本文简介:摘要:智能水面搜救机器人坚持以人为本的设计理念, 采用人工手动控制和智能自动化控制为一体的控制方式, 通过机器人底座皮划艇上配备的三轴陀螺仪、三轴加速度计、全向压力传感器、电子罗盘传感器、碰撞传感器、回充传感器等的驱动装置正常、快速运行, 利用机体内的人体红外感应器、LDS激光测距传感器、超声波传感器和图智能水面搜救机器人的设计方案本文内容:摘要:智能水面搜救机器人坚持以人为本的设计理念, 采用人工手动控制和智能自动化控制为一体的控制方式, 通过机器人底座皮划艇上配备的三轴陀螺仪、三轴加速度计、全向压力传感器、电子罗盘传感器、碰撞传感器、回充传感器等的驱动装置正常、快速运行, 利用机体内的人体红外感应器、LDS激光测距传感器、超声波传感器和图像成影防水摄像及视频装置进行搜索并定位被搜救对象, 借助可伸缩承重机器人长臂、360度旋转腰部的伸缩调控以及具有轻柔微调性能的机器力量托抱起被救对象, 采用光电编码器、电动船控制器、钓鱼船速度控制器等配合实现水面灵活回转快速靠站功能, 第一时间把被搜救对象托放至水上救援艇上, 实现省时、省力、精准、安全的水面救援。
关键词:水面搜救;智能;人体红外感应;全向压力传感;光电编码器1方案概述本方案产品坚持以人为本的设计理念, 采用人工手动控制和全智能机器人自动化为一体的合二为一的控制方式, 通过机器人底座皮划艇的驱动装置快速运行于水面, 利用机体内的红外线装置和图像成影或防水摄像头视频装置进行搜索并定位被搜救对象, 使用机械臂灵活的伸缩调控性能和强大的又具有温柔微调性能的机器力量托抱起被救对象, 再加上水面灵活回转快速靠站功能, 快速高效安全第一时间把被搜救对象托放至水上救援艇上, 实现省时、省力、精准、安全的水面救援。
应急装备在水灾救援中的技术应用
应急装备在水灾救援中的技术应用水灾是一种常见的自然灾害,给人们的生命和财产带来了巨大的威胁。
在水灾救援中,应急装备的技术应用起着至关重要的作用。
这些装备不仅能够提高救援效率,还能在危险的环境中保障救援人员和受灾群众的安全。
一、水上救援装备1、冲锋舟和橡皮艇冲锋舟和橡皮艇是水灾救援中常用的水上交通工具。
它们具有轻便、灵活、速度快等特点,能够在湍急的水流和复杂的水域环境中快速行驶,将救援人员和物资运送到受灾区域。
冲锋舟通常由铝合金或玻璃钢等材料制成,具有较强的抗风浪能力和承载能力;橡皮艇则由橡胶或 PVC 材料制成,便于携带和操作。
2、水上救生机器人水上救生机器人是一种新型的救援装备,它可以通过遥控操作在水面上快速移动,将溺水者拖回岸边。
这种机器人具有体积小、速度快、操作简单等优点,能够在救援人员无法到达的危险区域发挥作用。
例如,在水流湍急、水深较大的区域,水上救生机器人可以迅速接近溺水者,为其提供救生圈或绳索,将其安全带回。
3、潜水装备在水灾救援中,有时需要潜水员深入水下进行救援和搜寻工作。
潜水装备包括潜水服、氧气瓶、面镜、脚蹼等。
潜水服能够提供保暖和防护作用,氧气瓶为潜水员提供呼吸所需的氧气,面镜和脚蹼则有助于潜水员在水下观察和行动。
二、通信与照明装备1、卫星电话在水灾发生时,地面通信设施往往会遭到破坏,导致通信中断。
卫星电话则可以通过卫星信号进行通信,不受地面通信网络的影响。
救援人员可以使用卫星电话与指挥中心保持联系,及时汇报救援情况和接收指令。
2、对讲机对讲机是一种短距离通信设备,在水灾救援现场广泛应用。
它具有操作简单、通话清晰、无需基站支持等优点,能够让救援人员之间进行实时沟通和协调。
3、应急照明设备水灾发生后,往往会出现电力中断的情况,导致受灾区域一片漆黑。
应急照明设备如手电筒、头灯、应急灯等能够为救援工作提供必要的照明。
这些设备通常具有防水、防爆、耐用等特点,能够在恶劣的环境中正常工作。
机器人技术在灾后救援中的应用研究

机器人技术在灾后救援中的应用研究在自然灾害和人为灾难发生后,及时、高效的救援行动对于拯救生命、减少损失至关重要。
近年来,机器人技术的快速发展为灾后救援工作带来了新的希望和可能性。
机器人能够在危险、复杂和人类难以到达的环境中执行任务,为救援人员提供关键的支持和帮助。
一、灾后救援面临的挑战灾后的环境通常充满了各种危险和不确定性。
例如,地震可能导致建筑物倒塌、道路阻塞和山体滑坡,洪水可能引发泥石流、淹没大片区域,火灾可能产生高温、有毒烟雾和不稳定的结构。
这些情况使得救援工作异常艰难,救援人员面临着生命威胁,而且救援行动往往受到时间、空间和资源的限制。
此外,灾后的信息获取也非常困难。
通信设施可能被破坏,现场情况混乱,难以准确了解被困人员的位置、数量和状况。
传统的救援方法在这些情况下可能效率低下,甚至无法实施。
二、机器人技术在灾后救援中的优势机器人具有许多独特的优势,使其能够在灾后救援中发挥重要作用。
首先,机器人可以进入危险区域而不受生命威胁。
它们能够承受高温、高压、有毒气体等恶劣环境,执行搜索、探测和救援任务,减少救援人员的伤亡风险。
其次,机器人可以携带各种传感器和设备,如摄像头、热成像仪、生命探测仪等,能够更准确、全面地获取灾区的信息。
这些信息对于制定救援策略、确定被困人员位置和评估灾区状况至关重要。
再者,机器人能够长时间工作,不受疲劳和体力限制。
它们可以持续执行任务,提高救援工作的效率和连续性。
三、常见的灾后救援机器人类型1、搜索救援机器人这类机器人通常配备多种传感器,能够在废墟、狭小空间和复杂地形中进行搜索。
它们可以通过声音、图像和生命迹象检测来寻找被困人员。
一些搜索救援机器人还具有攀爬、穿越障碍物的能力,能够深入到难以到达的地方。
2、排险机器人在灾后的危险环境中,如火灾现场、化学品泄漏区域等,排险机器人可以执行灭火、清除障碍物、处理危险物品等任务,为救援人员创造安全的通道和工作环境。
3、运输机器人运输机器人可以携带救援物资和设备,穿越困难地形,将急需的物品送达灾区。
水上救援机器人相关题目

水上救援机器人相关题目朋友们!今天咱们来聊聊那些超级酷的水上救援机器人。
你能想象吗?在波涛汹涌的水面上,有一群不用喘气、不会疲惫的“救援侠”随时准备大显身手,拯救那些身处险境的人们。
这可不是科幻电影里的情节,而是实实在在正在发展的高科技哦!首先呢,咱得问问,这些水上救援机器人到底是怎么在水里“行走”的呀?是像鱼儿一样摆动尾巴,还是像船儿一样靠螺旋桨推动呢?其实呀,它们的推进方式多种多样。
有的靠强大的喷水系统,就像个小小的水上喷气式飞机,往后喷水,自己就往前冲啦;还有的呢,装备了先进的螺旋桨,在水里转得飞快,带着机器人迅速驶向目标。
而且呀,它们的转向也特别灵活,不管是来个急转弯还是绕个小圈子,都不在话下,就像在水面上跳着欢快的舞蹈。
那它们又是怎么发现需要救援的人的呢?这就不得不提到它们那些厉害的“眼睛”和“耳朵”啦。
它们身上配备了各种高科技的探测设备,比如高清摄像头,就像一双锐利的眼睛,能在茫茫水面上清晰地看到远处的情况。
还有红外探测器,就算是在黑暗的夜晚或者大雾弥漫的时候,也能通过人体散发的热量准确找到被困者的位置,简直就是黑夜中的“超级侦探”。
再说说它们的救援能力吧。
当发现有人落水后,它们会以最快的速度赶到现场。
有的机器人会抛出救生圈或者救生绳,就像一个贴心的小助手,把救命的工具准确地送到落水者手中。
还有更厉害的呢,有些机器人可以直接把落水者捞起来,放到自己的“救援舱”里,然后稳稳地送回岸边,就像一个温暖又安全的“水上摇篮”。
不过呀,这些水上救援机器人也不是十全十美的。
比如说,在水流特别湍急、漩涡很多的复杂水域,它们可能就会有点“晕头转向”,操作起来没那么得心应手。
还有啊,要是遇到特别恶劣的天气,像狂风暴雨、雷电交加的时候,它们的电子设备会不会出故障呢?这可都是需要解决的问题。
想象一下,未来的水上救援机器人会是什么样子呢?也许它们会变得更加智能,不仅能自己判断救援情况,还能和被困者进行简单的对话,安抚他们的情绪。
一种小型智能水上救援机器人的设计

一种小型智能水上救援机器人的设计
盛肖炜;于林鑫
【期刊名称】《江苏工程职业技术学院学报》
【年(卷),期】2022(22)4
【摘要】针对水上救援设备操作复杂、体积大、不易收纳、对操作人员专业要求高等问题,设计了一款适用城市环境、能实现快速救援的小型水上救援机器人。
机器人以树莓派Raspberry Pi 3B为主控模块,结合避障模块和热成像模块,通过YOLO算法视觉识别技术、2.4 GHz无线通信技术、TDOA(Time Difference of Arrival,到达时间差,简称TDOA)无线定位算法,实现了救援机器人的远程遥控辅助功能、智能识别溺水者功能、自主避障功能、弹射功能和智能终端显示功能,试验验证了机器人的稳定性和可靠性。
【总页数】7页(P17-23)
【作者】盛肖炜;于林鑫
【作者单位】无锡开放大学机电与信息学院;东北大学信息科学与工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种新型可变形智能救援机器人系统设计
2.一种小型智能割草机器人的设计与实现
3.一种轻小型智能扫雷机器人的设计与实现
4.一种智能仿生救援机器人的设计
5.一种轻小型智能扫雷机器人的设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水上救援机器人
品牌:浦喆
水上救援机器人是一款新型的高效救生设备,用于水域救援时对落水人员的快速施救。
救援人员可以直接驾驶或者在岸上通过手持遥控控制站操作该水上救援机器人下水施救,是目前先进的水上救生设备。
该救援机器人为充气式,储运是放在一个拉杆拖箱里,一个人即可携带,展开时间20秒钟;该救援机器人速度最快可达30公里/小时,是救生员的10倍以上,可以在波浪之中稳定转弯,抗风浪行进;机器人可同时救起7名落水者,落水者可以抓住它两边的拉手,或是趴在上面等待救援;可以拖拉救生圈、橡皮艇和浮水绳,两台机器人可以联机并排组合一起救援;还可根据用户要求增配搭载救生衣、安全头盔、防水对讲机、强光搜救灯、防水全天候摄像机、300米的水面漂浮绳等安全配套器材。
技术参数:
1、整机重量:42Kg 手持控制站重量 0.46Kg
2、尺寸:长200 ×宽 70×高15(cm)
3、储存尺寸:长109 ×宽84×高 60(cm)
4、水上速度(最大): 30.4公里/小时
5、功率(KW): 8KW
6、遥控距离(米): 2600米
7、载人浮力(kg): 160公斤
8、浮载把手数量: 7个
9、水上向前的推力:25公斤
10、快速展开充气时间(手动充气泵) :20秒钟
11、驱动电源:锂离子充电电池
12、船艇连续工作时间:≥2h
13、手持遥控控制站:可单手操作,具有防水功能,浸入水深1米、30分钟后可正常操作使用,手持遥控器能监测到机器人的机器运行性能。
14、配套安全器材:消防员专用救生衣2套、救生拖带1套。