YKA3722MA步进电机驱动器使用说明书
3MA22100 步进电机驱动器使用手册说明书

3MA22100(三相高压)细分步进驱动器使用手册Version1.0版权所有 不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】宁波纳川自动化科技有限公司3MA22100步进电机驱动器使用说明 在使用本品前,请仔细阅读本使用说明书请妥善保管本说明书,以备日后参考本册外观图片仅供参考,请以实物为准安全注意事项请勿带电插拔连接线缆。
此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿。
驱动器为功率设备,尽量保持工作环境的散热通风。
在连上步进电机,调节好电流后使其连续工作半小时后观察步进电机是否在额定温度后方可进行后续使用,如果电机温度过高请联系制造商。
一、产品简介1.1 产品概述3MA22100是纳川科技最新推出的一款采用精密电流控制技术设计的高细分步进电机驱动器,适合驱动110-130型各种品牌的三相混合式步进电机。
由于采用了先进的抗噪声控制方法,能大幅度降低电机运转时的噪声和振动,使得步进电机运转时的噪声和平稳性趋近于伺服电机的水平。
和市场上的大多数其他细分驱动产品相比,步进电机和驱动器的发热量降幅达15-30%。
1.2 产品特点⏹高性能、低价格、超低噪声⏹电机和驱动器发热极低⏹供电电压AC110-250V⏹输出电流峰值可达8.3A(均值5.86A)⏹输入电信号TTL兼容(5V兼容)⏹静止时电流自动减半⏹可驱动三相混合式步进电机⏹高速光耦隔离信号输入,脉冲响应频率最高可达100KHz⏹抗高频干扰能力强⏹输出电流设定方便⏹有过压、欠压、过流、过热、相间短路保护功能1.2 应用领域适合各种大型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、小噪声、高速度的设备中效果特佳。
二、电气、机械和环境指标2.1 电气指标说明 3MA22100最小值 典型值 最大值 单位 输出电流 3.3(均值2.34)- 10(均值7.11) A 输入电源电压 110 180 250(含纹波)VAC 逻辑输入电流 7 10 16 mA 步进脉冲频率 0 - 40 KHZ 绝缘电阻500MΩ2.2 使用环境及参数冷却方式自然冷却使用环境场合 尽量避免粉尘、油雾及腐蚀性气体环境温度0℃-+50℃ 最高工作温度70℃湿度 40-90% RH9 (不能结露和有水珠)震动 5.9m/S2 Max 保存温度 -20℃-125℃ 重量约1500克2.3 机械安装图 单位:毫米2.4 加强散热方式(1)驱动器的可靠工作温度通常在65℃以内,电机的工作温度在80℃以内;(2)安装驱动器时请采用竖着侧面安装,形成较强的空气对流,必要时机内靠近驱动器出安装风扇,强制散热,保证驱动器在可靠的工作温度范围内工作。
步进电机驱动器说明书

步进电机驱动器说明书DHBQ30722是基于DSP控制的三相步进电机驱动器。
它是将先进的DSP控制芯⽚和三相逆变驱动模块结合⼀起所构成的新⼀代数字步进电机驱动器。
驱动电压为AC110V-220V,适配电流在7.0A以下、外径57-130mm的各种型号的三相混合式步进电机。
该驱动器内部采⽤类似伺服控制原理的电路,此电路可以使电机运⾏平稳,⼏乎没有震动和噪⾳,电机在⾼速时,⼒矩⼤⼤⾼于⼆相和五相混合式步进电机。
定位精度最⾼可达60000步/转。
该产品⼴泛应⽤于雕刻机、中型数控机床、电脑绣花机、包装机械等分辨率较⾼的⼤、中型数控设备上。
特●⾼性能、低价格●设有16档等⾓度恒⼒矩细分,最⾼分辨率60000步/转●最⾼反应频率可达200Kpps●步进脉冲停⽌超过1.5s时,线圈电流⾃动减到设定电流的⼀半●光电隔离信号输⼊/输出●驱动电流1.2A/相到7.0A/相分16档可调●单电源输⼊,电压范围:AC110V-220V●相位记忆功能(注:输⼊停⽌超过3秒后,驱动器⾃动记忆当时电机相位,重新上电或MF信号由低电平变为⾼电平时,驱动器⾃动恢复电机相位)。
电流设定驱动器⼯作电流由DIP-1端⼦设定,运⾏电流为正常⼯作输出电流设置开关(详见下表)运⾏电流(A) 1.2 1.5 2.0 2.3 2.5 3.0 3.2 3.6 D1OFF OFF OFF OFF OFF OFF OFF OFF D2OFF OFF OFF OFF ON ON ON ON D3OFF OFF ON ON OFF OFF ON ON D4OFF ON OFF ON OFF ON OFF ON运⾏电流(A) 4.0 4.5 5.0 5.3 5.8 6.2 6.57.0 D1ON ON ON ON ON ON ON ON D2OFF OFF OFF OFF ON ON ON OND3OFF OFF ON ON OFF OFF ON ON D4OFF ON OFF ON OFF ON OFF ON细分设定驱动器细分由DIP-2端⼦设定,共16档,由6位拨码开关的前四位分别设定(后两位为功能设定)。
步进电机的应用—三相混合式步进电机驱动器使用说明书

三相混合式步进电机驱动器使用说明书1.特点★AC80~220V交流供电,能适应恶劣的电网环境★双极恒相流细分驱动★最大输出驱动电流6A/相(有效值,峰值达8A)★最大30000步/转的十六种细分模式可★过压、过流保护★输入信号光电隔离★可适应共阳、共阴、单/双脉冲多种模式★脱机保持功能★提供节能的自动半电流锁定功能2.性能指标供电电源80V~220VAC,容量0.8KVA输出电流有效值6A/相(峰值可达8A)(输出电流可由面板拨码开关设定)驱动方式恒相流PWM控制励磁方式400步/转,500步/转,600步/转,750步/转,1000步/转1500步/转,2000步/转,2500步/转,3000步/转,3750步/转5000步/转,6000步/转,7500步/转,10000步/转,15000步/转30000步/转绝缘电阻在常温常压下>500MΩ绝缘强度在常温常压下1KV,1分钟3.使用环境及参数冷却方式强制风冷使用环境场合尽量避免粉尘、油雾及腐蚀性气体温度0℃~+50℃湿度<80%RH,无凝露,无结霜震动 5.9m/s2Max保存温度-20℃~+65℃外形尺寸187×116×81mm重量 1.3Kg4.功能及使用★电源电压驱动器内部的开关电源设计保证了其可以适应较宽的电压范围,推荐使用80~220VAC,提高电压对提高电机的高速力矩有效,但是同时会加大运行噪音。
由于电机电磁感应回导致电机外壳生出一定的电荷,为确保使用者安全,请务必使用线径2mm2以上的机壳保护线和驱动器的机壳接地端子与保护大地可靠连接,并采用隔离变压器为驱动器供电★输出电流选择本驱动器采用双极恒流方式,最大输出电流值为6A/相(有效值),通过驱动器侧板第7,8四位开关的不同组合可以方便的选择4种电流值,从2A到6A(详见电流选择表),(注意:这里所说的电流是指驱动器每相输出电流的有效值,使用串电流表的方式不能得到正确的读数。
步进驱动器使用说明书
步进驱动器使用说明书一、产品介绍步进驱动器是一种用于控制步进电动机运动的装置。
它将电脉冲输入转换为电机的步进运动,广泛应用于各种自动控制系统中。
二、产品特点1. 高精度控制:步进驱动器能够精确控制步进电动机的旋转角度,可实现精细的位置控制。
2. 可编程性:步进驱动器支持编程控制,用户可以通过编写程序实现复杂的运动控制逻辑。
3. 稳定性:步进驱动器采用高质量的电子元件和先进的控制算法,具有良好的稳定性和可靠性。
4. 多种控制模式:步进驱动器支持脉冲/方向控制模式和脉冲/脉冲控制模式,适应不同的应用需求。
三、使用步骤1. 连接电源:将步进驱动器连接到适当的电源电压,并确保电源线接线正确,避免短路或接错线的情况发生。
2. 连接步进电动机:将步进电动机的接线端子与驱动器的对应接口相连,并确保连接牢固、接触良好。
3. 连接控制信号:根据需要选择合适的控制模式,将控制信号(脉冲信号和方向信号)连接到驱动器的相应输入端口。
4. 参数设置:根据实际应用需求,通过驱动器上的参数设置面板或软件界面,设置步进驱动器的相关参数,如工作电流、步进角度等。
5. 运动控制:通过发送适当的脉冲信号,控制步进驱动器使步进电动机按照预定的步进角度和方向运动。
6. 系统调试:在开始正式运行之前,对步进驱动器和步进电动机进行系统调试,检查运动是否符合预期,如有异常及时进行排除。
四、注意事项1. 避免过载:在使用步进驱动器时,应根据步进电动机的额定电流和工作环境的要求,合理设置驱动器的工作电流,避免电机过载。
2. 防止过热:长时间工作时,步进驱动器和步进电动机可能会产生热量,应确保散热良好,避免过热对设备造成损坏。
3. 中断电源前停止运动:在断开电源之前,应先停止步进电动机的运动,避免突然停止对电机造成冲击。
4. 防止电源浪涌:在连接电源时,应注意防止电源浪涌对步进驱动器和步进电动机造成损坏。
可以采用稳压电源和过流保护装置等措施。
5. 定期检查和维护:定期检查步进驱动器和步进电动机的工作状态,如有异常及时进行维护和保养,延长设备寿命。
步进电机控制器-说明手册
步进电机,伺服电机可编程控制器KH-01使用说明一、系统特点•控制轴数:单轴;•指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);•最高输出频率:40KHz(特别适合控制细分驱动器);•输岀频率分辨率:1Hz;•编程条数:99条;•输入点:6个(光电隔离);•输岀点:3个(光电隔离);• 一次连续位移范围:一7999999〜7999999;•工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;•升降速曲线:2条(最优化);•显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;•自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;•手动运行功能:可调整位置(手动的点动速度和点动步数可设定);•参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;•程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;•回零点功能:可双向自动回到零点;•编程指令:共14条指令;•外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作;•电源:AC220V(电源误差不大于土15%。
一、前面板图前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输岀状态指示灯4、CP脉冲信号指示灯5、CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:脉冲------- 步进脉冲信号方向------- 电机转向电平信号+5V ---------- 前两路信号的公共阳端CP CW勺状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
5相步进马达驱动器使用说明书

●電源逆接保護:輸入電壓極性接反時自動斷流
保護功能
●過電流保護:輸入電流超過額定值時自動斷流
●過熱保護:當驅動器超過 80˚ C 時自動斷流*2
燈號顯示
電源,TIMING
外形尺寸
90 (L) ×65 (W) ×32 (H)mm
重量
270g
使用環境溫度範圍
0 ˚ C ~ 40 ˚ C
*1. [a] 瞬間最大電壓為 40V,平常使用請勿超過 36V,以免造成驅動器損壞。
0
0.36
0.75
1
0.36
0.75
2
0.36
0.75
3
0.38
0.76
4
0.44
0.87
5
0.53
1.04
6
0.62
1.25
7
0.70
1.39
8
0.79
1.57
9
0.88
1.75
A
出廠設定值 0.97
出廠設定值 1.93
B
1.06
2.11
C
1.14
2.27
D
1.23
2.44
E
1.32
2.63
F
1.40
5 相馬達內部結線圖
泰映 TROY 出線 5 線 10 線
A 藍 藍/黑 B 紅 紅/棕 C 橙 紫/橙 D 綠 黃/綠 E 黑 白/灰
山洋電氣 SANYO DENKI 5 線 5*線 10 線
黑 藍 黑/黃 橙 紅 黑白/橙 藍 橙 橙白/藍 紅 綠 紅白/白 黃 黑 黃白/紅
多摩川 TAMAGAWA 5 線 10 線
過熱時會閃爍
全步進時 10 個脈波 LED 燈亮一次,
步进电机驱动器使用手册说明书

步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
三相混合式步进电机驱动器设计原理和控制详解
上海昀研自动化科技有限公司自2004年起致力于三相混合式步进电机及驱动器的开发,42系列低压三相混合式步进电机,57系列低压、高压三相混合式步进电机,86系列低压、高压三相混合式步进电机,110、130系列高压三相混合式步进电机,YK3605MA,TK3411MA,YK3822MA,YKA3722MA等多款产品已成功应用于市场。
上海昀研自动化科技有限公司生产的三相混合式步进电机采用交流伺服原理工作,转子和定子的直径比高达50%,高速时工作扭矩大,低速时运行极其平稳,几乎无共振区。
其配套驱动器YK3822MA具有单相220V/50Hz输入,三相正弦输出,输出电流可设置,具有十细分和半流额定值60%功能;控制方式灵活,有“脉冲+方向控制”,也有“正转脉冲+反转脉冲”控制方式;有过热保护功能,因此使用起来十分的方便。
1.前言步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。
与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。
但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等,又严重制约了步进电机的应用范围。
步进电机的运行性能与它的驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。
相对于其他的驱动方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨率,而且可以减少或消除低频振动,使电机运行更加平稳均匀。
总体来说,细分驱动的控制效果最好。
因为常用低端步进电机伺服系统没有编码器反馈,所以随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。
所以在速度和精度要求不高的领域,其应用非常广泛。
因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以三相混合式步进电机比二相步进电机有更好应用前景。
传统的三相混合式步进电机控制方法都是以硬件比较器完成,本文主要讲述使用DSP及空间矢量算法SVPWM来实现三相混合式步进电机控制。
步进电机控制说明

实训名称步进电机控制一、实训目的1.掌握步进电机控制系统的接线、调试、操作二、实训设备序号名称型号与规格数量备注1实训装置THHAJS-1 12实训挂箱B10 13导线3号若干45通讯编程电缆SC-90 1 三菱6实训指导书THHAJS-1 17计算机(带编程软件) 1 自备三、面板图+四、控制要求1.总体控制要求:如面板图所示,利用可编程控制器输出信号控制步进电机运行。
2.按下“SD”启动开关,系统准备运行。
3.打开“MA”手动开关,系统进入手动控制模式,选择电机旋转方向,再按动“SE”单步按钮,步进电机运行一步。
4.关闭“MA”手动开关,系统进入自动控制模式,此时步进电机开始自动运行。
5.分别按动速度选择开关“V1”、“V2”、“V3”,步进电机运行在不同的速度段上。
6.步进电机开始运行时为正转,按动“MF”开关,步进电机反方向运行。
再按动“MZ”开关,步进电机正方向运行。
五、功能指令使用及程序流程图六、端口分配及接线图1.端口分配及功能表 序号 PLC 地址(PLC 端子)电气符号(面板端子) 功能说明1 X00 SD 启动开关2 X01 MA 手动3 X02 V1 速度14 X03 V2 速度25 X04 V3 速度36 X05 MZ 正转7 X06 MF 反转8 X07 SE 单步 9Y00 A A 相 10 Y01 B B 相 11 Y02 C C 相 12 Y03DD 相 13 面板V+ 接电源+24V电源正端 14主机COM 、COM0、COM1、COM2接电源GND电源负端2.PLC 外部接线图七、操作步骤1. 检查实训设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实训模块之间的接线,认真检查,确保正确无误。
2.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-90通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
步进电机使用
两相混合式步进电机驱动器使用说明书一、概述HST884A细分型两相混合式步进电机驱动器,采用直流16~50V供电,适合驱动电压24V~50V,电流小于4.0A外径42~86毫米的两相混合式步进电机。
此驱动器采用交流伺服驱动器的电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。
高速时力矩也大大高于其它二相驱动器,定位精度高。
广泛适用于雕刻机、数控机床、包装机械等分辩率要求较高的设备上。
主要特点1 平均电流控制,两相正弦电流驱动输出2 直流24~50V供电3 光电隔离信号输入/输出4 有过压、欠压、过流、相间短路保护功能5 十六档细分和自动半流功能6 八档输出相电流设置7 具有脱机命令输人端子8 电机的扭矩与它的转速有关,而与电机每转的步数无关9 高启动转速10.高速力矩大二、控制信号接口图1是驱动器的接线原理图1、控制信号定义PLS/CW+:步进脉冲信号输入正端或正向步进脉冲信号输入正端PLS/CW-:步进脉冲信号输入负端或正向步进脉冲信号输入负端DIR/CCW+:步进方向信号输入正端或反向步进脉冲信号输入正端DIR/CCW-:步进方向信号输入负端或反向步进脉冲信号输入负端ENA+:脱机使能复位信号输入正端ENA-:脱机使能复位信号输入负端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2、控制信号连接上位机的控制信号可以高电平有效,也可以低电平有效。
当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端。
现在以集电极开路和PNP输出为例,接口电路示意图如下:图1. 输入接口电路(共阳极接法)控制器集电极开路输出图2. 输入接口电路(共阴极接法)控制器PNP输出注意:VCC值为5V时,R短接;VCC值为12V时,R为1K,大于1/8W电阻;VCC值为24V时,R为2K,大于1/8W电阻;R必须接在控制器信号端。
步进电机驱动器使用说明
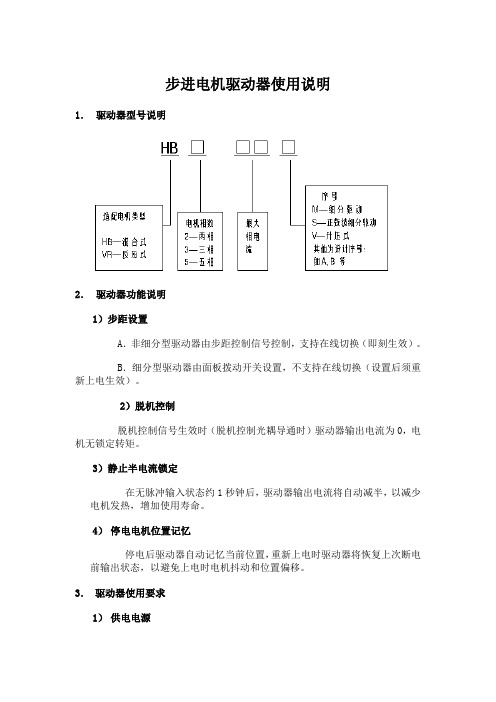
步进电机驱动器使用说明1.驱动器型号说明2.驱动器功能说明1)步距设置A.非细分型驱动器由步距控制信号控制,支持在线切换(即刻生效)。
B.细分型驱动器由面板拨动开关设置,不支持在线切换(设置后须重新上电生效)。
2)脱机控制脱机控制信号生效时(脱机控制光耦导通时)驱动器输出电流为0,电机无锁定转矩。
3)静止半电流锁定在无脉冲输入状态约1秒钟后,驱动器输出电流将自动减半,以减少电机发热,增加使用寿命。
4)停电电机位置记忆停电后驱动器自动记忆当前位置,重新上电时驱动器将恢复上次断电前输出状态,以避免上电时电机抖动和位置偏移。
3.驱动器使用要求1)供电电源我公司生产的系列步进电机驱动器都采用单电源供电,有直流、交流、交直流三种方式,随型号而异。
供电电源都支持宽电压范围。
供电电压的合适与否关系到步进电机的运行性能:A.低的电压有利于减少输出电流纹波,提高电机运行的平稳性,但较低的电压会影响电机的启动转矩和高频运行转矩,导致启动频率和最高运行频率降低。
B.偏小的电源容量(输出电流能力)也会影响电机高频运行转矩,并容易导致欠压保护。
C.为了使驱动器更可靠地工作,避免产生欠压、过压保护和损坏,在电压波动严重的情况下应该使用电源稳压器。
D.220V供电时须使用隔离变压器,同时进行可靠接地。
一般情况下用户应该使用驱动器标明的额定电压供电。
特殊情况要使用非额定电压的,必须保证电压在安全范围内。
2)电机接口A.驱动器和电机型号必须匹配,如三相混合式电机必须使用三相混合式驱动器,否则会导致工作异常甚至损坏驱动器和电机。
B.电机线必须和驱动器输出端子一一对应,否则会导致工作异常甚至损坏驱动器和电机。
C.电机额定电流必须和驱动器输出电流一致。
驱动器输出电流大于电机额定电流时会导致电机过热甚至烧坏,驱动器输出电流小于电机额定电流会导致输出转矩不足。
3)信号接口输入电压:3.5V< in V <9V输入电流:5mA< in I <20mA如果信号不在此范围内,须外接分压∕分流电阻 out R 使信号匹配。
步进电机的使用流程
步进电机的使用流程1. 准备工作在开始使用步进电机之前,我们需要进行一些准备工作,确保我们能够顺利地使用步进电机。
•确定步进电机的型号和规格•确定步进电机的电源和控制系统•准备相应的驱动器和控制器•确保工作环境安全可靠2. 连接步进电机系统在连接步进电机系统之前,请确保已经阅读并理解相关的使用手册和技术说明书。
1.将步进电机连接到驱动器–根据步进电机的型号和规格,确定正确的连接方式,并将驱动器连接到步进电机上。
–确保连接正确并牢固。
2.连接驱动器和控制器–将驱动器通过正确的接口连接到控制器上。
–确保连接正确并牢固。
3.连接电源和控制系统–将电源接线连接到步进电机系统的电源输入端口。
–将控制系统的接口与电源和驱动器连接,确保连接正确并牢固。
3. 设置步进电机参数在开始使用步进电机之前,需要设置一些参数,以确保步进电机能够正常工作。
1.设置步进电机的分辨率–根据步进电机的型号和规格,设置步进电机的分辨率。
–分辨率决定了步进电机每一步的角度大小。
2.设置步进电机的运行模式–根据实际需求,设置步进电机的运行模式,可以是全步进模式或半步进模式。
–全步进模式提供较高的转速和较低的扭矩,适用于高速运动。
–半步进模式提供较低的转速和较高的扭矩,适用于高精度位置控制。
3.设置步进电机的驱动电流–根据步进电机的额定电流和使用条件,设置步进电机的驱动电流。
–驱动电流过高可能会导致步进电机过热,而驱动电流过低可能会导致步进电机无法输出足够的力矩。
4. 控制步进电机运动设置完成步进电机的参数后,可以开始控制步进电机的运动。
1.编写控制程序–使用合适的编程语言(如C、Python等)编写步进电机的控制程序。
–根据实际需求,编写相应的运动控制算法,实现步进电机的位置控制、速度控制等功能。
2.调试控制程序–运行控制程序,观察步进电机的运动情况。
–如有需要,调整控制程序中的参数,以达到预期的运动效果。
3.监测步进电机状态–在步进电机运动过程中,定期监测步进电机的状态,如温度、电流等参数。
步进电机驱动器说明书

1. How the motor controller control the motor speedIn the motor controller, there is a hardware timer T1 that is used to generate stepping pulse for stepper motor or reference position for servomotor. The input clock’s frequency of the timer, plus the preset value of this timer, determine the slewing speed of the motors.When T1 generates an interrupt, it mighto Drive the motor to move 1 step (1 micro-step or 1 encoder tick) for low speed slewing.o Drive the motor to move up to 32 steps for high speed slewing. This method applies to motor controller firmware version 2.xx. For motor controller with firmware 3.xx or above,the motor controller always drive the motor controller 1 steps/interrupt.2. Two motion modeGOTO mode: The master device tells the motor controller the desired destination, and then send a "Start" command. The motor controller will control the motor to move to that destination. The master device can check the motor status, real-time position, cancel the slewing during the GOTO. Speed(Tracking) mode: The master device calculate a proper preset value for T1 and send it to the motor controller, and then send a "Start" command. The motor controller will control the motor to slew at the desired speed. The master device can check the motor status, real-time position, cancel the slewing during the GOTO.There is a command which is used to select between the two motion mode for the next "Start"command. Generally, the motor should be at full stop status before setting the motion mode.Generally, the motor controller returns to "Speed Mode" when the motor stops automatically.A typical slewing session include:o Check whether the motor is in full stop status. If not, stop it.o Set the motion mode.o Set the parameters, for example, destination or preset value of T1.o Set the "Start" command.o For a GOTO slewing, check the motor status to confirm that the motor stops (Generally means arriving the destination. ). For a Speed mode slewing, send "Stop" command to endthe session.3. Calculation on Master DeviceA Skywatcher motor controller does not do complex calculation. The master device do it instead.Calculate the angleA Skywatcher motor controller only counts the step or the ticks of an incremental encoder on themotor shaft. But a master device can inquire the motor controller the resolution of the telescope axis (how many steps the telescope axis have for one revolution). We called it CPR (Counts per revolution). With CPR, the master device can convert an angle to steps or vise versa.Please note that CPR might be different for the two axes of a mount.Calculate the T1 preset value.A Skywatcher MC can report the T1’s input clock frequency TMR_Freq (Mention at the beginningof this article). A master device can use TMR_Freq and CPR to calculate the T1 preset value for desired motor speed.Speed_CountsPerSec = Speed_DegPerSec * CPR / 360T1_Preset = TMR_Freq / Speed_CountsPerSec= TMR_Freq * 360 / Speed_DegPerSec / CPRCalculate the T1 preset value for high speed slewingT1 preset value can be too small for high speed slewing, if T1’s input clock frequency is low. To solve this problem, the motor use a slightly different way to control motor speed when highspeed slewing is required (For example, move an axis with higher then 128x sidereal rate). When T1 generates an interrupt, the motor controller moves N micro-steps for a stepper motor, orchange the reference position for N steps for a DC servo motor. That means, for the same T1preset value, the motor will run N times faster than changing only 1 steps for each T1 interrupt event.Currently, N is a fixed number, and a master device can inquire the motor controller for it. Itmight be 16, 32 or 64.The formula for calculating T1 preset value for high speed slewing is:T1_Preset = N * TMR_Freq * 360 / Speed_DegPerSec / CPRWhen a master wants an axis to slew at high speed, it should let the motor controller know when it configures the motor to the Speed (Tracking) Mode. For GOTO mode, the motor controller will take care of it automatically.4. Command Format:The command always starts with a ":" character and ends with a carriage return character 0x0D.If a second ":" character is received by the motor controller before the carriage return character, then the motor controller will abandon the characters received and starts receiving a newcommand.Motor controller will process the command and send response after it receives the carriage return character.A response from the motor controller always starts with a "=" character and ends with a carriagereturn character, if the response is normal.If there is something wrong, the motor will response a message starts with a "!" character, followed by error code and a carriage return character.All the character in the command and the response are ASCII characters.A command from the master device has the following parts:o1 byte Leading character: ":"o1 byte command word, check command set table for detailso1 byte channel word: "1" for RA/Az axis; "2" for Dec/Alt axis.o1 to 6 bytes of data, depending on command word: character "0" to "9", "A" to "F"o1 byte Ending character: carriage return character.A normal response from the motor controller has the following parts:o1 byte Leading character: "="o1 to 6 bytes of data, depending on which command is processed: "0" to "9", "A" to "F"o1 byte Ending character: carriage return character.An abnormal response from the motor controller has the following parts:o1 byte Leading character: "!"o2 bytes of error code: "0" to "9", "A" to "F"o1 byte Ending character: carriage return character.Data format:o24 bits Data Sample: for HEX number 0x123456, in the data segment of a command orresponse, it is sent/received in this order: "5" "6" "3" "4" "1" "2".o16 bits Data Sample: For HEX number 0x1234, in the data segment of a command or response, it is sent/received in this order: "3" "4" "1" "2".o8 bits Data Sample: For HEX number 0x12, in the data segment of a command or response, it is sent/received in this order: "1" "2".5. Command Set6. HardwareUART: 9600bps, 1 start bit, 1 stop bit, no parity check.Signal level: 5V or 3.3V.On most of the EQ mount, the TX and RX lines are separated. The motor controller will send its response immediately after it received and process the command.On most the Alt/Az mount, TX and RX lines are connected together, and there is another line(Drop) to indicate that the TX/RX bus is busy. The Drop line is controlled by the master only, which means the master device should pull the Drop line to low level when it starts to send acommand and keep pulling it low until it receives the full response from the motor controller, or,a time-out occurs. The motor controller will send its response immediately after it received andprocess the command, thus the master device should release the TX/RX bus as soon as possible after the last bit of the command is shift out of the hardware register.The motor controller pull its TX line to high level with a 5.1K to 10K resistor, other than that, it does not strongly pull the TX line to high level and other devices can pull the TX line to low level without problem.6. Wi-Fi ConnectionThe same protocol runs on the SynScan Wi-Fi dongle or mount with built-in Wi-Fi module.The Wi-Fi dongle/module runs a UDP server and listen to UDP port 11880 to accept commands from host.The command must be sent in a single UDP package; the response is also included in a single package.When the Wi-Fi dongle/module works in access point mount, its IP address is 192.168.4.1. If it runs in station mode, the router that it links to allocates its IP address.6. Useful ResourcesSample Code: https:///archive/p/skywatcher/Documents: /download/manual/application-development/。
YKA3722MA步进电机驱动器使用说明书

YKA3722MA细分驱动器◆高性能、低价格◆设有16档等角度恒力矩细分,最高分辨率60000步/转,使运转平滑,分辨率提高◆采用独特的控制电路,有效的降低了噪音,增加了转动平稳性◆最高反应频率可达200Kpps◆步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电机过热◆双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率◆光电隔离信号输入/输出◆驱动电流从0.7A/相到7.0A/相分16档可调◆可以驱动任何7.0A相电流以下三相混合式步进电机◆单电源输入,电压范围:AC100-220V◆出错保护:――过热保护――过流、电压过低保护◆YKA3722MA驱动器体积为80x156x200mm3。
◆相位记忆功能(注:输入脉冲停止超过5秒后,驱动器自动记忆当时电机相位,重新上电或MF信号由有效变为无效时,驱动器自动恢复电机相位。
)典型应用雕刻机、分辨率较高的大、中型数控机床包装机、电脑绣花机、恒速应用简述YKA3722MA为一款等角度恒力矩细分型驱动器,驱动电压交流110V~220V,适配电流在7.0A以下、外径86~130mm的各种型号的三相混合式步进电机。
该驱动器内部采用类似伺服控制原理的电路,此电路可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大大高于两相和五相混合式步进电机。
定位精度最高可达60000步/转。
电器规格说明最小值典型值最大值供电电压(VAC)110 220 250正常工作输出电流(A)0.7 - 7逻辑输入电流(mA)15步进脉冲响应频率(KHZ)- - 200 脉冲低电平时间(uS) 2.5 - -电流设定1. STOP/Im为保持状态输出电流设置电位器,可设置为正常输出电流的20%~80%(顺时针增大,逆时针减小)2. RUN/Im为正常工作输出电流设置开关(详见下表)R-1 0 1 2 3 4 5 6 7 8 9 A B C D E F Im(A) 0.7 1.1 1.5 2.0 2.4 2.8 3.2 3.6 4.0 4.5 5.0 5.4 5.8 6.2 6.6 7.0 细分设定YKA3722MA驱动器细分设定如下表:SK 0 1 2 3 4 5 6 7 8 9 A B C D E F 脉冲/转60000 30000 20000 12000 10000 6000 5000 4000 3000 2000 1200 1000 800 600 500 400 DIP开关功能设定DP1 OFF:接受外部脉冲ON:驱动器内部自发7.5KHz脉冲DP2 OFF:脉冲信号+方向信号控制方式ON:正向脉冲+反向脉冲控制方式驱动器接线示意图输入信号波形时序图安装尺寸(单位:mm)指示灯功能说明标记符号功能注释PWR 电源指示灯接通电源时,绿色指示灯亮。
步进电机驱动器的使用

浙江工业职业技术学院步进电机驱动器的使用机械设备装调与控制技术综合应用实训步进电机驱动器的使用浙江工业职业技术学院步进电机驱动器:是一种能使步进电机运转的功率放大器,能把控制器发来的脉冲信号转化为步进电动机的角位移的执行机构。
驱动驱动器步进电机浙江工业职业技术学院控制信号输入端口性能参数设置拨码电机控制输出端口电源输入步进电机驱动器的使用☐步进电机驱动器端口说明:浙江工业职业技术学院步进电机驱动器的使用1.控制信号输入端口☐步进电机驱动器端口说明:名称功能说明PUL+脉冲输入信号脉冲上升沿有效;脉冲宽度应大于1.2μs。
5~24VDC电平兼容。
PUL-DIR+方向输入信号高/低电平信号,方向信号应先于脉冲信号至少5μs建立。
电机的初始运行方向与电机绕组接线有关,互换任一相绕组(如A+、A-交换)可以改变电机初始运行的方向。
5~24VDC电平兼容。
DIR-ENA+使能控制信号此输入信号用于使能或禁止驱动器输出。
ENA接低电平时,驱动器将切断电机各相的电流使电机处于自由状态,不响应步进脉冲。
当不需用此功能时,使能信号端悬空即可。
5~24VDC电平兼容。
ENA-单方向运转时可以悬空电机控制时可以悬空浙江工业职业技术学院步进电机驱动器的使用☐步进电机驱动器端口说明:2.功率接口名称功能说明GND电源输入GND:直流电源地+V:直流电源正,范围+18V~+48V,推荐+36V+VA+、A-电机控制输出端口电机A、B相绕组B+、B-浙江工业职业技术学院步进电机驱动器的使用☐步进电机驱动器端口说明:3.性能参数设置拨码半流/全流模式设置SW1SW2SW3SW4SW5SW6SW7SW8运行电流设置细分设置浙江工业职业技术学院步进电机驱动器的使用3.性能参数设置拨码☐步进电机驱动器端口说明:运行电流设定输出峰值电流输出有效值电流SW1SW2SW31.00A0.71A ON ON ON1.46A 1.04A OFF ON ON1.91A 1.36A ON OFF ON2.37A 1.69A OFF OFF ON2.84A 2.03A ON ON OFF3.31A 2.36A OFF ON OFF3.76A 2.69A ON OFF OFF4.20A 3.00A OFF OFF OFF浙江工业职业技术学院步进电机驱动器的使用3.性能参数设置拨码☐步进电机驱动器端口说明:细分设定步数/转SW5SW6SW7SW8400ON ON ON ON 800ON OFF ON ON 1600OFF OFF ON ON 3200ON ON OFF ON 6400OFF ON OFF ON 12800ON OFF OFF ON 25600OFF OFF OFF ON 1000ON ON ON OFF 2000OFF ON ON OFF 4000ON OFF ON OFF 5000OFF OFF ON OFF 8000ON ON OFF OFF 10000OFF ON OFF OFF 20000ON OFF OFF OFF浙江工业职业技术学院步进电机驱动器的使用☐步进电机驱动器端口说明:3.性能参数设置拨码半流/全流模式设置OFF表示半流模式,ON表示全流模式。
电机驱动器说明

f
3
0
p
C
1
1
1 7 2 0 7 5 3
8
1 6
0
L298N
U
p
G
EN
B
EN
A
IN4
IN3
IN2
IN1
2
C
N 6
D 11.0592M
ISEN
B
ISEN
A
OUT4
OUT3
OUT2
OUT1
VSS
V
S
1
1
1
1
3
2
4
9
5
4
3
+5V 1
2
+5V
Download
3
4
+12V
5
6
7
8
9
ቤተ መጻሕፍቲ ባይዱ
1 0
2
1N4007
D
1N4007
P2.0
1
C
0 3
4
LM1
P1.3
P1.2
P1.1
P1.0
Vin
G
N
D Vout
LED4
LED3
LED2
LED1
220UF
LIP4
LIP3
LIP2
LIP1
C
2
+5V
LIP1 R-2
1
2 LIP2
1
2
1
2
1
2
1
1
C
2
0 4
TLP4 LIP3
TLP3
TLP2
TLP1
4
3
LIP4
4
1
步进电机驱动器使用说明

l 外形图
SW6
D45
SW5 SW4
SW3
SW2
Alarm Power
SW1
B+ BA+ A-
拨码开关X
电机 X
Alarm
DIR
CP
GND
Vcc
DIR CP
信号输入端
5V
B+
B-
电机Y
A+
A-
SW6
SW5
SW4
SW3
SW2
拨码开关Y
SW1
注:拨码开关的标号可能和上图标识不一致,以上图标识的位置为准。
4A 3A 2.5A 2A 1.7A 1.5A 1.2A 0.8A
l 细分状态
SW1
0 (ON) 0 (ON) 1 (OFF) 1 (OFF)
SW2
0 (ON) 1 (OFF) 0 (OFF) 1 (OFF)
l 电机接线
细分数 20 32 40 64
l 拨码开关定义
工作W6 SW5 SW4 SW3 SW2 SW1
l 电流设定端
SW6
OFF ON OFF OFF ON ON OFF ON
SW5
OFF OFF ON OFF ON OFF ON ON
SW4
OFF OFF OFF ON OFF ON ON ON
额定电流
一般用途中应将sw4设成秒左右电流自动减至一半左右实际值的6信号接口cp为控制脉冲信号端脉冲频率最高1khz脉冲宽度最小4时电机反转
步进电机驱动器使用说明
l 驱动器功能说明
驱动器功能
操作说明
微步细分数设定 输出电流设定 自动半流功能
信号接口 电机接口 电源接口 指示灯 安装说明
步进电机说明书
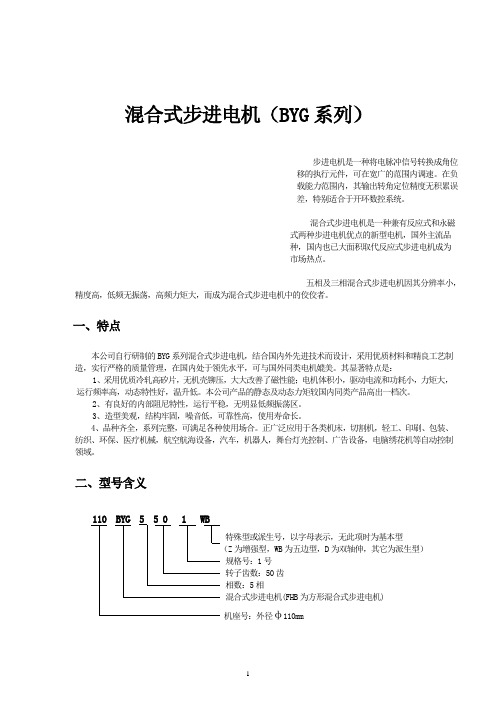
混合式步进电机(BYG系列)步进电机是一种将电脉冲信号转换成角位移的执行元件,可在宽广的范围内调速。
在负载能力范围内,其输出转角定位精度无积累误差,特别适合于开环数控系统。
混合式步进电机是一种兼有反应式和永磁式两种步进电机优点的新型电机,国外主流品种,国内也已大面积取代反应式步进电机成为市场热点。
五相及三相混合式步进电机因其分辨率小,精度高,低频无振荡,高频力矩大,而成为混合式步进电机中的佼佼者。
一、特点本公司自行研制的BYG系列混合式步进电机,结合国内外先进技术而设计,采用优质材料和精良工艺制造,实行严格的质量管理,在国内处于领先水平,可与国外同类电机媲美。
其显著特点是:1、采用优质冷轧高矽片,无机壳铆压,大大改善了磁性能;电机体积小,驱动电流和功耗小,力矩大,运行频率高,动态特性好,温升低。
本公司产品的静态及动态力矩较国内同类产品高出一档次。
2、有良好的内部阻尼特性,运行平稳,无明显低频振荡区。
3、造型美观,结构牢固,噪音低,可靠性高,使用寿命长。
4、品种齐全,系列完整,可满足各种使用场合。
正广泛应用于各类机床,切割机,轻工、印刷、包装、纺织、环保、医疗机械,航空航海设备,汽车,机器人,舞台灯光控制、广告设备,电脑绣花机等自动控制领域。
二、型号含义110 BYG 5 5 0 1 WB特殊型或派生号,以字母表示,无此项时为基本型(Z为增强型,WB为五边型,D为双轴伸,其它为派生型)规格号:1号转子齿数:50齿相数:5相混合式步进电机(FHB为方形混合式步进电机)机座号:外径φ110mm三、产品系列及性能参数1.方形电机系列2.圆形电机系列注:1、打 * 者为正在开发的新产品,可供期货;型号后有“Z”者为增强型。
2、二相电机为四引出线,四相电机为八引出线,除出线方式不同外,其余参数性能完全一样,配本公司驱动电源时用二相电机。
四相电机可改接成二相电机,有串联、并联及单极性三种接法,按并联接法时,相电流应加倍,四相电机用并联接法时,高速性能要优于其它接法。
【步进电机及驱动器控制器】3轴控制器使用手册

1
三轴运动控制器操作手册
目录
一 与外部驱动器及IO (输入输出)接线图 (4)
二 用户管理操作 (5)
三 系统参数设置 (7)
四 IO (输入输出)设置 (8)
五 系统自检操作 (10)
六 手动操作
(13)
七编程操作 (15)
八自动执行 (17)
九指令详解 (19)
十电子齿轮计算及公式 (21)
十一编程案例 (24)
十二常见问题及处理 (28)
2
3
旗开得胜一与外部驱动器及IO(输入输出)接线图
1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)
2.IO(外接开关及继电器)的接线图(红色线为1号线)
4
旗开得胜
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作
注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YKA3722MA细分驱动器
◆高性能、低价格
◆设有16档等角度恒力矩细分,最高分辨率60000步/转,使运转
平滑,分辨率提高
◆采用独特的控制电路,有效的降低了噪音,增加了转动平稳性
◆最高反应频率可达200Kpps
◆步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多
场合的电机过热
◆双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率
◆光电隔离信号输入/输出
◆驱动电流从0.7A/相到7.0A/相分16档可调
◆可以驱动任何7.0A相电流以下三相混合式步进电机
◆单电源输入,电压范围:AC100-220V
◆出错保护:
――过热保护
――过流、电压过低保护
◆YKA3722MA驱动器体积为80x156x200mm3。
◆相位记忆功能(注:输入脉冲停止超过5秒后,驱动器自动记忆当时电机相位,重新上电或MF信号
由有效变为无效时,驱动器自动恢复电机相位。
)
典型应用
雕刻机、分辨率较高的大、中型数控机床包装机、电脑绣花机、恒速应用
简述
YKA3722MA为一款等角度恒力矩细分型驱动器,驱动电压交流110V~220V,适配电流在7.0A以下、外径86~130mm的各种型号的三相混合式步进电机。
该驱动器内部采用类似伺服控制原理的电路,此电路可以使电机低速运行平稳,几乎没有震动和噪音,电机在高速时力矩大大高于两相和五相混合式步进电机。
定位精度最高可达60000步/转。
电器规格
说明最小值典型值最大值
供电电压(VAC)110 220 250
正常工作输出电流(A)0.7 - 7
逻辑输入电流(mA)15
步进脉冲响应频率(KHZ)- - 200 脉冲低电平时间(uS) 2.5 - -
电流设定
1. STOP/Im为保持状态输出电流设置电位器,可设置为正常输出电流的20%~80%(顺时针增大,逆时针
减小)
2. RUN/Im为正常工作输出电流设置开关(详见下表)
R-1 0 1 2 3 4 5 6 7 8 9 A B C D E F Im(A) 0.7 1.1 1.5 2.0 2.4 2.8 3.2 3.6 4.0 4.5 5.0 5.4 5.8 6.2 6.6 7.0 细分设定
YKA3722MA驱动器细分设定如下表:
SK 0 1 2 3 4 5 6 7 8 9 A B C D E F 脉冲
/转
60000 30000 20000 12000 10000 6000 5000 4000 3000 2000 1200 1000 800 600 500 400 DIP开关功能设定
DP1 OFF:接受外部脉冲
ON:驱动器内部自发7.5KHz脉冲
DP2 OFF:脉冲信号+方向信号控制方式ON:正向脉冲+反向脉冲控制方式
驱动器接线示意图
输入信号波形时序图
安装尺寸(单位:mm)
指示灯功能说明
标记符号功能注释PWR 电源指示灯接通电源时,绿色指示灯亮。
TM 零点/脉冲输出指示灯过零点时,在有脉冲输入时,绿色指示灯点亮。
O.H 过热指示灯过热或过压等故障时红色指示灯点亮。
O.C 过流指示灯电流过高或者过低时指示灯亮。
Im
电机线圈电流设定电位
器
调整电机相电流,逆时针减小,顺时针增大。
引脚灯功能说明
标记符号功能注释PU+ 输入信号光电隔离正端接+5V供电电源+5V-+24V均可驱动,高于+5V需接限流电阻。
PU- DP2=OFF时为步进脉冲信号下降沿有效,每当脉冲由高变低时电机走一步。
输入电阻220
Ω,要求:低电平0-0.5V,高电平4-5V,脉冲宽度>2.5us。
DP2=ON时为正向步进脉冲信号
DR+ 输入信号光电隔离正端接+5V供电电源+5V-+24V均可驱动,高于+5V需接限流电阻。
DR- DP2=OFF时为方向控制信号用于改变电机转向。
输入电阻220Ω,要求:低电平0
-0.5V,高电平4-5V,脉冲宽度>2.5us。
DP2=ON时为反向步进脉冲信号
MF+ 输入信号光电隔离正端接+5V供电电源+5V-+24V均可驱动,高于+5V需接限流电阻。
MF- 电机释放信号有效(低电平)时关断电机线圈电流,驱动器停止工作,电机处于自由状态。
TM+ 原点输出光电隔离正端电机线圈通电位于原点置为有效;光电隔离输出(高电平)。
TM- 原点输出信号光电隔离负端TM+端接输出信号限流电阻,TM-接输出地。
最大驱动电流50mA,最高电压50V。
RDY+ 驱动器准备好输出信号光电隔
离正端驱动器状态正常,准备好接收控制器信号时该信号有效(低
电平)。
RDY- 驱动器准备好输出信号光电隔离负端
~AC 电源AC110V~250V
U
电机接线
V
W
!注意:
1.输入电压不能超过交流250V。
2.输入控制信号电平为5V,当超过5V时需要接限流电阻(12V串接510Ω,24V串接1200Ω)。
3.驱动器温度超过70度时停止工作,故障O.H指示灯亮,直到驱动器温度降到50度,驱动器自动
恢复工作。
出现过热保护请加装散热器。
4.过流(电流过大或电压过小)故障指示灯O.C灯亮,请检查电机接线及其它短路故障或是否电压过
低,若是电机接线及其它短路故障,排除后需要重新上电恢复。
5.电源接通时绿色指示灯PWR亮。
6.过零点时,TM指示灯在脉冲输入时亮。