透视投影变换中椭圆中心畸变误差模型及其
投影误差公式

问题 提出
5
6
RC30 ADS40(Leica/Helava) DMC
7
8
空中摄影就是 从空中一定高度上 摄取地面物体影像 的过程。
9
航摄像片的质量主要包括:
①构像质量: ②几何质量: ③表观质量:
影像的分解力,清晰度。 体现在影像的量测性能方面。 色调正常,反差适中。
航空摄影的飞行质量要求:
问题 提出
13
内 容 安 排
14
投影[Projection]
一个空间点按一定方式在一个平面上的构 像,叫做该空间点的投影。
物点、像点、投射线、像面(承影面)
平行投影[Parallel Projection ]
投射线互相平行的投影,叫做平行投影。
正射投影(垂直投影)
局部范围内,地形图可视为地面的垂直投影。
29
向量表达式
z y x S
SA λ Sa
-f
y
xA yA zA x y f
x
a
o
y
A
zA
xA
x f y f
xA zA yA zA
(1)
30
坐标变换
xA X T y A R Y z Z A
S
P yc
记为: a
f h f c c P0
倾斜误差 m0 a m a m0 yc0 hc xc,xc0 38 M
倾斜误差公式
a rc r0
rc sin sin f rc sin sin
2
2
i
yc , yc
0
r0 rc
y
c
摄影考试重点题目与答案
名词解释1。
摄影测量学:利用光学摄影机摄影的像片,研究和确定被摄物体的形状、大小、位置、性质和相互关系的一门科学技术2。
像点位移:当地面起伏、像片倾斜时,地面点在像片上的构像相对理想情况时产生的位置差异。
3.摄影比例尺:摄影像片当作水像片,地面取平均高程时,这时像片上的一段的水平距L 之比为摄影比例尺.4。
数字影像相关:利用计算机对数字影像进行数字计算的方式完成影像的相关,识别出两幅(或多幅)影像的同名像点。
5.解析空中三角测量:以像点坐标为依据,采用一定的数学模型,用少量控制点作为平差条件,解求加密点物方坐标的理论方法或作业过程。
6.摄影基线:相邻两摄站点之间的连线7.航线弯曲度:偏离航线两端像片主点间的直线最远的像主点到该直线的距离与该直线距离之比。
8.立体像对:在航空摄影时,同一条航线相邻摄站拍摄的两张像片具有60%左右的重叠度,这两张像片成为立体像对。
9.相对定向:确定一个立体像对中两张像片相对位置的参数10。
绝对定向:确定相对定向所建立的几何模型的比例尺和模型空间方位。
11。
中心投影:投影光线相互平行的投影12.影像内定向:将仪器坐标系中的像点坐标转换为像平面坐标系中坐标的过程13.摄影基线:航线方向相邻两个摄影站点间的空间距离14。
航向重叠:同一条航线上相邻两张像片的重叠度15。
像片的外方位元素:确定摄影瞬间像片在空间坐标系中位置和姿态的参数。
或称为表示摄影中心和像片在地面坐标系中的位置和姿态的参数.16。
内方位元素:确定投影中心(物镜后节点)相对于像平面位置关系的参数17。
核线相关:沿核线寻找同名像点18.DEM:数字地形模型中地形属性为高程时称为数字高程模型19。
影像数字化:将透明正片或负片放在影像数字化器上,把像片上像点的灰度值用数字形式记录下来,此过程为影像数字化20。
模型绝对定向:用已知的地面控制点求解相对定向所建立的几何模型的比例尺和模型空间方位元素21。
同名核线:同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确定的平面22.同名像点:同一地面点发出的两条光线经左右摄影中心在左右像片上构成的像点称为同名像点。
数码照相机的双目定位方法-论文
数码照相机的双目定位方法-论文数码照相机的双目定位方法数码相机定位方法是双目定位方法,双目定位能精确地确定两部相机相对位置,该方法只需在物体表面标定靶标,从靶标上把圆心的像精确地找到,标定就实现。
对物体上一个特征点,用两部固定于不同位置的相机拍摄物体的像,分别得到点在两部相机像平面的坐标。
确定靶标上圆心的像的坐标时,由于圆是椭圆的特例,从而用椭圆来处理更具有普遍性,但是椭圆的图象中心并不是椭圆中心所对应的像点,因此,我们建立坐标系,利用空间椭圆的透视变换,空间椭圆在照相机像平面上投影椭圆的中心坐标与空间椭圆中心的实际投影像点坐标的空间几何关系,再结合椭圆拟合法利用计算机编程求解出在照相机像平面上投影椭圆的中心坐标。
在确定两台照相机的相对位置时,首先分析简单的平视双目立体视觉的三维测量原理,再对两个照相机的摆放位置不做特殊要求时利用照相机的透视变换对模型进行分析,用两个相机定位是利用空间点在两照相机像面上的透视成像点坐标来求取空间点的三维坐标。
为了简化分析,设两台照相机水平放置,视觉系统的坐标原点为其中一台照相机的投影中心。
对模型检验时考虑到精度和稳定性对模型的影响,建立了双目定位系统精度模型,从系统结构参数对精度的影响和照相机焦距对精度的影响两方面进行了分析,检验结果符合预期目标。
最后用靶标的坐标得出了两部固定照相机的相对位置。
关键词:椭圆拟合;几何关系;透视投影变换;双目定位;非线性最小二乘,无约束化问题一问题的重述数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
第3讲 中心投影与透视变换
投影中 心
Center of Projectio n (COP). -摄站
S
S
S
2、中心投影与平行投影 [Central Projection & Parallel Projection ] 正片位与负片位 之间的关系及转 换
b' a'
中心投影
正射投影
A
2013-5-16
B
C
36 《航空摄影测量学》—第一讲
2航片存在两项误差:像片倾斜引起的像点 位移,地形起伏引起的像点位移
s b c A A B a a0 b b0 p B0 B
s a p
C
E
A0
2013-5-16
《航空摄影测量学》—第一讲
37
3比例尺的不同:地图有统一比例尺,航片无 统一比例尺 4表示方法的不同:地图为线划图,航片为影 像图 5表示内容的不同:地图需要综合取舍 6几何上的不同:可组成像对立体观察
v i
P S
a
A b v B E n
v
T1 T
v
2013-5-16
《航空摄影测量学》—第一讲
34
[四]航摄像片与地形图的区别
航片
2013-5-16 《航空摄影测量学》—第一讲
地形图
35
[四]航摄像片与地形图的区别
1投影方式的不同:地形图为正射投影,航
摄像片为中心投影
A B
C c b a
a b
c
S
hi
i Phi
主垂线(SN)
j
R J W
t
j
V N t
E
机器视觉工程师招聘笔试题及解答(某大型国企)

招聘机器视觉工程师笔试题及解答(某大型国企)一、单项选择题(本大题有10小题,每小题2分,共20分)1、以下哪项是机器视觉系统中最常用的光源类型?A. 红外线光源B. 自然光C. LED光源D. 激光光源答案:C解析:在机器视觉系统中,光源的选择对于图像的质量和后续处理至关重要。
LED 光源因其高亮度、长寿命、低发热、易于控制以及可制成多种颜色和形状的优点,成为机器视觉中最常用的光源类型。
LED光源能够均匀地照亮被检测物体,减少阴影和反光,提高图像的对比度和清晰度,从而有利于后续的图像处理和识别。
2、在机器视觉图像处理中,以下哪种算法常用于图像边缘检测?A. Sobel算子B. 霍夫变换C. K-means聚类D. 傅里叶变换答案:A解析:在机器视觉图像处理中,边缘检测是提取图像中对象边界的重要步骤。
Sobel 算子是一种常用的边缘检测算法,它通过计算图像中每个像素点的梯度强度和方向来检测边缘。
Sobel算子利用水平和垂直方向的卷积核对图像进行卷积运算,从而得到每个像素点在水平和垂直方向上的梯度值,进而计算出梯度强度和方向。
当梯度强度超过某个阈值时,即可认为该点是一个边缘点。
因此,Sobel算子在机器视觉中广泛应用于图像边缘检测。
而霍夫变换主要用于直线和圆形的检测,K-means聚类是一种聚类算法,用于将数据分为多个类别,傅里叶变换则主要用于图像的频域分析和处理。
3、在机器视觉系统中,用于将图像从模拟信号转换为数字信号的设备是:A. 光源B. 相机C. 图像处理软件D. 镜头答案:B解析:在机器视觉系统中,相机是负责捕捉图像并将其从模拟信号转换为数字信号的关键设备。
光源用于照亮被检测物体,以便相机能够清晰地捕捉图像;图像处理软件则用于对相机捕捉到的数字图像进行进一步的处理和分析;而镜头则负责将光线聚焦到相机的感光元件上,但它并不直接参与信号的转换过程。
因此,正确答案是B,即相机。
4、在图像处理中,用于增强图像对比度的方法不包括:A. 直方图均衡化B. 伽马校正C. 边缘检测D. 对比度拉伸答案:C解析:在图像处理中,增强图像对比度是常见的操作之一。
matlab 透视变换径向变换 标定
文章标题:深度探讨MATLAB中的透视变换、径向变换及标定技术一、引言MATLAB作为一款强大的科学计算软件,不仅可以用于数据分析和算法开发,还可以用于图像处理和计算机视觉。
在图像处理中,透视变换、径向变换和标定技术是非常重要的内容,本文将重点探讨MATLAB中这些技术的原理、应用和实现方法。
二、透视变换的原理及应用1. 透视变换的概念透视变换是指将物体从不同角度观察时产生的透视效果纳入考虑,将图像或物体在三维空间中的投影映射到二维平面上,以实现更真实的展示效果。
2. 透视变换的应用透视变换广泛应用于摄影、虚拟现实、增强现实等领域,可以实现图像校正、图像拼接、建筑物测量等功能。
3. MATLAB中透视变换的实现方法在MATLAB中,可以使用imtransform函数实现透视变换,也可以通过使用仿射变换矩阵实现透视效果。
三、径向变换的原理及应用1. 径向变换的概念径向变换是指将图像的各个像素点的极坐标进行变换,使得图像呈现出径向拉伸或压缩的效果,常用于图像畸变校正、图像增强等场景。
2. 径向变换的应用径向变换在医学图像处理、地图纠偏、光学畸变校正等领域有着重要的应用,可以有效改善图像的质量和准确度。
3. MATLAB中径向变换的实现方法在MATLAB中,可以利用imwarp函数实现径向变换,也可以通过自定义变换函数实现特定的径向变换效果。
四、标定技术的原理及应用1. 标定技术的概念标定技术是指通过已知参考标准对相机或传感器进行校准,以获得准确的内部参数和外部参数,从而实现对图像进行定位、测量和三维重构。
2. 标定技术的应用标定技术广泛应用于计算机视觉、机器人导航、AR/VR技术等领域,可以实现姿态估计、目标跟踪、环境感知等功能。
3. MATLAB中标定技术的实现方法MATLAB提供了Camera Calibrator App和相关函数,可以通过对已知标定图像进行处理,从而获得相机的内参、外参和畸变参数,实现对图像的准确处理和分析。
专升本《计算机图形学》-试卷-答案
专升本《计算机图形学》一、(共57题,共150分)1. 下列设备中属于图形输出设备的是( )①鼠标②LCD ③键盘④LED ⑤打印机⑥扫描仪⑦绘图仪⑧触摸屏(2分)A。
①③⑥⑧ B.②④⑤⑦ C.②⑤⑥⑦ D.④⑥⑦⑧标准答案:B2. 用正负法画圆,如果圆心在原点(0,0)处,初始点(0,R ),顺时针生成圆,若当前点Pi在圆外,则下一点Pi+1向左走一步,递推公式为( )。
(2分)A。
B 。
C.D.标准答案:D3。
在三维空间中点P(3, 5, 4)绕z轴旋转180o后的坐标为:( ) (2分)A。
(3, 4, 5) B.(—5,-3, 4) C.(5, 3, 4) D.(4, 4, 4)。
标准答案:B4。
4.在三维几何实体的表示法中,( )表示法的结果难以实现绘图输出。
(2分)A。
CSG法 B.八叉树表示法C.扫描表示法 D。
对称数据结构法。
标准答案:A5. 在种子填充算法中所提到的四向连通区域算法,()填充八向连通区。
(2分)A.可以B.不一定。
标准答案:B6. 下列()是用实型量计算,且每一步需对Y进行四舍五入。
(第一象限内,0£k£1的直线) (2分)A。
DDA算法 B。
Bresenham算法C.中点画线算法D.DDA算法和Bresenham算法标准答案:A7。
在齐次坐标中,最后一维坐标H称为()因子。
(2分)A。
比例 B.旋转 C.反射 D.斜切标准答案:A 8。
线模型的数据结构简单且易于实现,只要给出所有顶点坐标及线段与其顶点的关系即可。
(2分)A.颜色 B。
角度 C.平面 D。
顶点坐标。
标准答案:D9。
参数曲线的表示有代数形式()和两种。
(2分)A.几何形式B.分数 C。
阵列 D.固定形式标准答案:A10. 多边形填充时,下述哪个论述是错误的?()(2分)A。
多边形被两条扫描线分割成许多梯形,梯形的底边在扫描线上,腰在多边形的边上,并且相间排列;B。
多边形与某扫描线相交得到偶数个交点,这些交点间构成的线段分别在多边形内.外,并且相间排列;C。
基于透视投影和坐标变换的相机成像原理分析
则
若 M,N 为圆形区域时,L 为 M,N 的公切线。因此 L’为公切线的投影。其中, L’,M’,N’,A’,B’为 L,M,N,A,B 的投影,A,B,A’,B’均为单点。因此我们可以通过“外公切线 法定心法”求出靶心在投影平面的投影,方法如图 2 :
4
图 2 外公切线定心法原理
右图中作出一些直线,这些直线与各个图形仅有 1 个公共点,l , l , l , l ,四条切 线交于 A’,B’,C’,D’,如右图,连接 A’C’和 B’D’交与 O’,O’即为靶心所在位置的投影。 其对应原图像如左图。
0.491 0.747
0.259 0.598
De Ee
0.528 0.800
4.2.2 两种圆心确定方法的比较
由此可见:使用外公切线定心法时,其精准度和稳定性都比较好,这是因为 外公切线定心法可以利用几何特点,更好地锁定靶心的位置。在不利情况下,例 如φ接近 时,或者 D 教大时,也能较好地算出靶心,因此其稳定性较高。但这 种算法需要在数字化图像上计算公切线,计算的时间复杂度较大。
3.2 透视投影原理及坐标变换 由于问题涉及到自然坐标系向投影平面的转换,首先我们说明坐标变换的原
理,图 1 为坐标系变换示意图。X Y Z 为观察坐标系,定义为左手坐标系。X’O’Y’ 为投影平面。XYZ 为自然坐标系,定义为右手坐标系。XOY 为原图像所在平面。 根据中心透视投影的性质,可以说明物的位置 P、P 的像 P’和O 在一条直线上。
计算机图形学复习题(带答案)

一.判断题(请在后面括号中打T或F)1.阴极射线管的技术指标主要是分辨率和显示速度; (Y )2.光栅扫描式图形显示器可看作是点阵单元发生器,可直接从单元阵列中的一个可编地址的象素画一条直线到另一个可编地址的象素; (N )3.计算机图形学标准通常是指数据文件格式标准和子程序界面标准; (Y )4.在种子填充算法中所提到的八向连通区域算法同时可填充四向连通区; (Y )5.边填充算法中是将扫描线与多边形交点左方的所有象素取补; (N )6.插值得到的函数严格经过所给定的数据点;逼近是在某种意义上的最佳近似;(Y )7.齐次坐标提供了坐标系变换的有效方法,但仍然无法表示无穷远的点;(N )8.若要对某点进行比例、旋转变换,首先需要将坐标原点平移至该点,在新的坐标系下做比例或旋转变换,然后在将原点平移回去;(Y )9.显式方程和参数曲线均可以表示封闭曲线或多值曲线;(N )10. 凡满足G'连续的曲线同时满足C'连续条件,反之则不成立;(N )11.计算机图形生成的基本单位是线段。
( F )12.一个逻辑输入设备可以对应多个物理输入设备。
(T )13.DDA(微分方程法)是Bresenham算法的改进。
(F )14.光的强度计算公式通常表示为:I = 0.59I + 0.30I + 0.11I ( T )15.Bezier曲线具有对称性质。
(T )16.Gourand光照模型能够即使出高光部位的亮度。
(F )17.NURBS曲线方法不能够提供标准解析曲线和自由曲线的统一数学表达。
( F )18.Phong算法的计算量要比Gourand算法小得多。
( F )19.齐次坐标系不能表达图形中的无穷远点。
(F )20.欧拉公式v – e + f = 2也适用于三维形体中的相关信息描述。
(T )二.单选题1.下面关于反走样的论述哪个是错误的?(D )A.提高分辨率;B.把象素当作平面区域进行采样;C.采用锥形滤波器进行加权区域采样;D.增强图象的显示亮度;2.多边形填充时,下述哪个论述是错误的?(C )A.多边形被两条扫描线分割成许多梯形,梯形的底边在扫描线上,腰在多边形的边上,并且相间排列;B. 多边形与某扫描线相交得到偶数个交点,这些交点间构成的线段分别在多边形内、外,并且相间排列;C. 在判断点是否在多边形内时,一般通过在多边形外找一点,然后根据该线段与多边形的交点数目为偶数即可认为在多边形内部,若为奇数则在多边形外部,而且不需考虑任何特殊情况;D. 边的连贯性告诉我们,多边形的某条边与当前扫描线相交时,很可能与下一条扫描线相交;3. 下面关于NURBS 的论述,哪个是错误的?( B )A. 可通过控制顶点和权因子来改变形状;B. 仅具有仿射不变性,但不具有透射不变性;C. 非有理B 样条、有理及非有理Bezier 曲线、曲面是NURBS 的特例;D. 可表示标准解析形状和自由曲线、曲面;4. 在光亮度插值算法中,下列论述哪个是错误的?( D )A. Gouraud 明暗模型计算中,多边形与扫描平面相交区段上每一采样点的光亮度值是由扫描平面与多边形边界交点的光亮度插值得到的;B. Phong 明暗处理模型中,采用了双线性插值和构造法向量函数的方法模拟高光;C. Gouraud 明暗模型和Phong 明暗处理模型主要是为了处理由多个平面片近似表示曲面物体的绘制问题;D. Phong 明暗模型处理的物体表面光亮度呈现不连续跃变;5. 下述关于Bezier 曲线]1,0[),(),(21∈t t P t P 的论述,哪个是错误的? ( A )A. P P P ==)0()1(21,在P 处)0(),1(21P P 的切矢量方向相同,大小相等,则)(),(21t P t P 在P 处具有G 1连续;B. P P P ==)0()1(21,在P 处)0(),1(21P P 的切矢量方向相同,大小相等,则)(),(21t P t P 在P 处具有C 1连续;C. 若保持原全部顶点的位置不变,只是把次序颠倒过来,则新的Bezier 曲线形状不变,但方向相反。
基于Scheimpflug定律的线结构光系统摄像机标定方法

基于Scheimpflug定律的线结构光系统摄像机标定方法王平江;吴娟娟【摘要】建立了基于倾斜镜头的摄像机标定模型,给出了利用HALCON软件的简便标定方法.以线结构光传感器模型为基础,深入研究了满足Scheimpflug定律的恒聚焦光路系统,Scheimpflug定律使光敏元件和镜头之间产生了一个夹角,镜头相对于相机是倾斜放置的.针对倾斜镜头的标定做了相应的研究,利用传统摄像机标定的线性与非线性模型建立了基于倾斜镜头的摄像机数学模型,并利用HALCON机器视觉软件给出流程化的标定步骤.【期刊名称】《制造业自动化》【年(卷),期】2017(039)010【总页数】6页(P10-14,19)【关键词】Scheimpflug定律;恒聚焦光路;倾斜镜头;线结构光;标定;HALCON 【作者】王平江;吴娟娟【作者单位】华中科技大学机械科学与工程学院国家数控系统工程技术研究中心,武汉 430000;华中科技大学机械科学与工程学院国家数控系统工程技术研究中心,武汉 430000【正文语种】中文【中图分类】TP290 引言在光电检测领域,激光三角法以其快速、非接触、高精度的特点,被广泛使用,其中市场上出现最多的是基于线结构光的激光三角测量系统,已经有相应的产品,如北京大恒公司代理国外厂商LMI Technologies INC的Gocator智能传感器系列产品,通过投射线结构光达到测距、测截面轮廓等目的。
线结构光三维测量系统的标定是获取三维信息的关键步骤,有许多学者都对其进行了研究,但是多数都不是恒聚焦光路,对摄像机的标定采用传统的线性模型与非线性模型,有如学者周富强、张广军[1],提出了一种新的基于自由移动平面参照物的表面视觉传感器全部参数的高精度简易标定方法;学者陈新禹等[2]提出的提出了一种基于单一圆形标靶标定线结构光视觉传感器的方法,他们的系统都是基于摄像机和透镜平行放置来建立的。
本文以线结构光三维测量系统为支撑,为达到高精度测量,设计了满足恒聚焦光路条件的硬件系统,由于光路条件的改变,原有的摄像机标定的线性模型以及非线性模型不足以描述本系统摄像机模型,因此本文深入研究了恒聚焦光路的数学模型,并建立了基于倾斜镜头的摄像机标定模型。
基于单目摄像头的地面测距方法
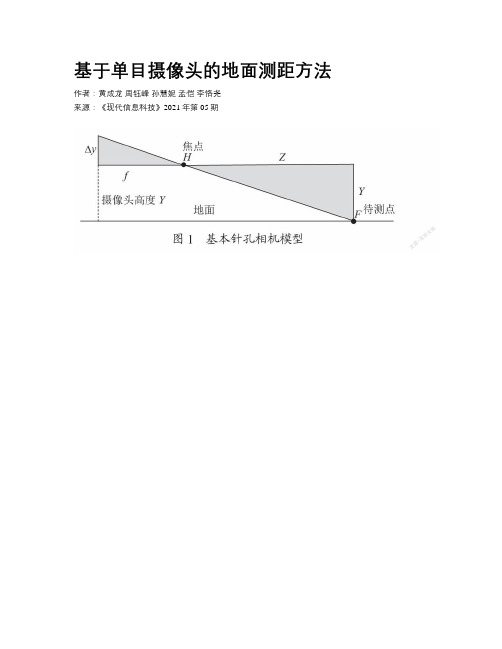
基于单目摄像头的地面测距方法作者:黄成龙周钰峰孙慧妮孟恺李恪尧来源:《现代信息科技》2021年第05期摘要:为解决传统的小孔成像测距算法需要给出待测物体的形状信息而较为烦琐的问题,提出一种基于大多数机器人摄像头的高度不需要改变的情形,利用针孔相机模型,找出像素坐标系和世界坐标系的转换关系,输入至少三对现实世界和像素世界的点对后,便可以实现对地面和立于地面上的物体进行测距的目的。
该算法实现简单,且一定范围内测距精度较高。
关键词:单目相机;地面测距;移动机器人;针孔相机模型中图分类号:TP391.4;TP242 文献标识码:A 文章编号:2096-4706(2021)05-0118-04Ground Distance Measurement Based on Monocular CameraHUANG Chenglong,ZHOU Yufeng,SUN Huini,MENG Kai,LI Keyao(School of Mechanical Electronic & Information Engineering,China University of Mining and Technology-Beijing,Beijing 100083,China)Abstract:In order to solve the troublesome problem that the traditional pinhole imaging distance measurement algorithm needs to give the shape information of the object to be measured,a situation based on the height of most robot cameras does not need to be changed is proposed. The pinhole camera model is used to find out the transformation relationship between pixel coordinate system and world coordinate system. After inputting at least three pairs of point pairs in the real world and pixel world,it can be completed to the ground and the object on the ground distance measurement. The algorithm is simple to implement and has high accuracy in measuring distance in a certain range.Keywords:monocular camera;ground distance measurement;mobile robot;pinhole camera model0 引言测距对于移动机器人来说有着重要的意义,许多机器人重要技术,例如同步定位与建图技术[1],目标跟踪技术以及自动驾驶技术等都需要进行测距。
基于改进透视变换的畸变图像校正方法研究
基于改进透视变换的畸变图像校正方法研究戴雯惠1,樊凌2(1.苏州经贸职业技术学院信息技术学院,江苏苏州215009;2.苏州市职业大学信息中心,江苏苏州215014)摘要:传统畸变图像校正方法存在一定局限性,为了提高畸变图像的校正能力,提出了基于改进透视变换的畸变图像校正方法研究。
根据透视变换的原理,将图像上的点映射到参数空间中,提取出图像中的直线,通过计算直线的交点,对透视变换进行改进,根据摄像机的投影过程,分析图像边缘出现变形的原因,利用透视变换镜头的图像成像模型,计算畸变图像的半径大小和圆心位置,结合有效畸变图像的提取流程,提取出有效畸变图像,采用经向畸变模型计算畸变图像的理想半径,通过计算两条线段之间的间距大小,求得畸变参数,将畸变图像定位到经纬图中,确定畸变图像的校正坐标,完成畸变图像校正算法的设计,结合畸变图像的校正流程设计,实现畸变图像的校正。
实验结果表明,基于改进透视变换的畸变图像校正方法不仅可以提高畸变图像的分辨率,还可以有效提高畸变图像的校正准确率,提高了畸变图像的校正能力。
关键词:改进透视变换;畸变图像;图像校正;矫正算法;畸变参数;中图分类号:TP391文献标识码:A文章编号:1673-1131(2020)11-0063-030引言传统的畸变图像校正方法虽然可以提高畸变图像的校正精度,但是在畸变图像的预处理阶段和计算过程中就显得十分复杂。
对不同畸变相机拍摄的畸变图像,应采用不同的图像校正算法,畸变相机的参数通常应是已知的[1]。
这种限制使其不能广泛应用于多种场景和多种畸变相机中[2]。
畸变图像校正是指从畸变图像中去除畸变的过程,以及对几何畸变进行的几何校正。
图像的畸变在实际应用中,通常是由于输入设备姿态和位置的改变而造成的几何畸变,如缩放、旋转等[3-5]。
这些畸变可以通过原图坐标与畸变图坐标之间的关系来描述。
将消除几何畸变、恢复原始图像的问题转化为根据畸变图像与两坐标间的关系,寻找无几何畸变的图像。
张正友相机标定法

x
y z
R 0
1
x'
T 1
y' z'
1
图像数字化
O1 在 u, v 中的坐标为 u0, v0
象素在轴上的物理尺寸为 dx, dy
V
Yd
Affine Transformation :
u
u0
xd dx
A1h1 A1h2
tr3rA1 1rh23
1 A1h1
1 A1h2
最大似然估计
• 以上求解旋转矩阵R的方法是基于最小距离的,不具备物理意义。接 下对上面得到结果用最大似然估计来进行优化。
• 转动标定模板,从不同的角度拍摄棋盘标定模板的n幅图像,设每幅 图像都具有相同的标定点,标定点的个数为m,并假设每个标定点 的坐标都有独立同分布的噪声,因为初始的参数已经求解,所以我 们将每张图像的控制点根据求解的参数重投影回三维空间,最小化 与真实值的差异,其实就是建立非线性最小化模型:
A
xw
t
yw
zw
1
sm~ A[R,t]M~
展开
X
u
sv Ar1
r2
r3
t
Y
Z
1
1
Z=0平面
X
u
sv Ar1
r2
r3
t
Y
0
Ar1
r2
X
t
Y
1
1
1
2 单应性矩阵推导
u
X
sv
Ar1
r2
t
Y
我们假定 H Ar1 r2 t 则原式可化为:
摄影测量学第03讲 中心投影与透视变换

3.1 中心投影与透视变换
3.1.2 透视变换及其特别点、线、面 2、透视变换中的特别点、线、面 (Especial Points、Lines、Planes )
特殊线(8): 透视轴(tt) 基本方向线(KV) 主纵线(iV) 真水平线(gg)
灭线(kk) 主垂线(SN) 像水平线(2) 38
S
G
2
山东科பைடு நூலகம்大学测绘科学与工程学院
复 习 Review
航摄像片的质量主要包括:
①构像质量: ②几何质量: ③表观质量: 影像的分解力,清晰度。 体现在影像的量测性能方面。 色调正常,反差适中。
3
山东科技大学测绘科学与工程学院
复 习 Review
对飞行质量的要求
• • • • • 对航高及比例尺的要求 对像片重叠度的要求 对像片倾斜角的要求 对航线弯曲度的要求 对航片旋偏角的要求
18
3.1 中心投影与透视变换
3.1.1 中心投影及其特征 4、像片与地形图的比较
地 形 1、图上任意两点间的距离与相应地面点 的水平距离之比为一常数,等于图比 图 例尺 的 特 2、图上任意一点引画的两条方向线间的 夹角等于地面上对应的水平角 点
19
山东科技大学测绘科学与工程学院
3.1 中心投影与透视变换
14
山东科技大学测绘科学与工程学院
3.1 中心投影与透视变换
3.1.1 中心投影及其特征 3、航摄像片是地面的中心投影
S
D
C
A
B
15
山东科技大学测绘科学与工程学院
3.1 中心投影与透视变换
3.1.1 中心投影及其特征 3、航摄像片是地面的中心投影 航摄像片是三维地面向二维像面的奇异线性 变换。 中心投影 地面 航摄像片 垂直投影 测图 地面 地形图 如何将中心投影的航摄像片转化为垂直投 影的地形图,就成为了航空摄影测量学的主要 任务之一。 16