浙大控制考研-845试卷-11A
浙大控制考研真题

浙大控制考研真题控制科学与工程是现代科学技术的重要分支,它以系统分析、建模与设计为基础,通过研究和设计控制系统来实现对各类系统的精确、快速和稳定的控制。
浙江大学作为中国著名的高等学府,对于控制科学与工程领域的研究和教育具有深厚的积淀和优势。
因此,浙大的控制考研真题无疑是考生备战考研的重要参考资源。
1. 控制科学与工程背景控制科学与工程是一门融合了数学、物理学、工程学等多个学科的综合性学科。
其研究对象是各类系统,包括机械系统、电子系统、生物系统等。
控制科学与工程的基本任务是通过对系统建模、分析和设计,实现对系统行为的控制和优化。
因此,掌握控制科学与工程的基本理论和方法对于实现系统的自动化和智能化具有重要作用。
2. 浙大控制考研真题介绍浙大作为中国具有良好声誉的高等学府,在控制科学与工程领域的研究和教育一直处于国内领先地位。
因此,浙大的控制考研真题是备战考研的宝贵资料之一。
这些真题以往年考研试题为基础,囊括了控制科学与工程各个领域的知识点和考察重点。
通过仔细研究和解答这些真题,考生可以更好地了解掌握控制科学与工程的基本理论和方法,并对考研内容有更清晰的认识。
3. 使用浙大控制考研真题的好处使用浙大控制考研真题的好处多多。
首先,这些真题严格按照考研要求编写,涵盖了重要的知识点和考察重点。
通过解答这些真题,考生可以了解自己在控制科学与工程方面的薄弱环节,并有针对性地进行复习和提高。
其次,浙大控制考研真题的解析通常会标注详细的解题思路和步骤,有助于考生掌握解题方法和技巧,提高解题效率。
此外,通过与真题的对比和分析,考生可以更好地理解和应用控制科学与工程的理论知识,培养问题解决能力和创新能力。
4. 如何有效利用浙大控制考研真题要有效利用浙大控制考研真题,考生可以采取以下几个步骤。
首先,先进行全面的阅读和理解真题,明确题目的要求和考察内容。
然后,进行逐题分析和解答,注重掌握解题的思路和方法。
如果遇到困难,可以参考真题的解析或者请教专业老师和同学进行讨论。
浙江大学《839控制理论》历年考研真题专业课考试试题
2012年浙江大学控制理论考研真题(回忆 版)
2011年浙江大学839控制理论考研真题
2010年浙江大学839控制理论考研真题
2009年浙江大学839控制理论考研真题
2008年浙江大学839控制理论考研真题
2007年浙江大学436控制理论考研真题
2006年浙江大学436控制理论考研真题
2005年浙江大学436控制理论考研真题
2004年浙江大学436控制理论考研真题
2003年浙江大学440控制理论考研真题
目 录
2012年浙江大学控制理论考研真题(回忆版) 2011年浙江大学839控制理论考研真题 2010年浙江大学839控制理论考研真题 2009年浙江大学839控制理论考研真题 2008年浙江大学839控制理论考研真题 2007年浙江大学436控制理论考研真题 2006年浙江大学436控制理论考研真题 2005年浙江大学436控制理论考研真题 2004年浙江大学436控制理论考研真题 2003年浙江大学440控制理论考研真题
浙江大学845自动控制原理考研真题试卷

紧急通知本资料由浙江大学控制科学与工程学院16届专业课129分学长,也就是我本人亲自整理编排而成。
大家可以叫我学长,年龄比我大的辞职考的可以叫我小弟。
资料不同于市面上那些看起来非常诱人实则是粗制烂造的资料,而是以一个考过845自控的过来人的经验,完全从学生的体验出发,做到资料最全,资料最好,资料最精致。
全套资料包括葵花宝典一到葵花宝典九共九本资料,每本资料都是我精心编辑整理的,并做了精美的封面,一共650页完美打印发给大家,大家把这650从头到尾肯透了,再做下我推荐的几本资料书(16年有一道15分的大题就是上面的类似题,第三问很多高手都没做出来,注意不是周春晖那本哈),可以说完全没问题了。
这是其它卖家不可能做到的。
同时赠送845自控全套电子资料。
葵花宝典一完全由我本人原创,里面包含了考浙大845自动控制原理的全部问题,比如考多少分比较保险,怎么复习,有哪些好的资料书,最近几年考题变化及应对策略,浙大常考题型,招生名额,复试资料,导师联系,公共课复习用书及方法以及845近年命题风格分析等一系列问题,全是我的心得和经验,方法,技巧等,说句心里话,我自己都觉得这些资料非常宝贵,能帮助学弟学妹们少走很多弯路。
注意:前面是一些关于我的故事,有些地方可能对你有用,如果不感兴趣,可以直接拉到后面去看,资料清单和图片都在后面。
学长自我介绍学长姓邓,名某某,男,本科于14年毕业于四川大学电气信息学院自动化专业,考浙大控制考了3次,14年大三时第一次考浙大控制总分没过线。
当时我们学校有三个同学征战浙大控制科学与工程,结果全军覆没,只有我一人过了300分,由此可见考浙大控制还是很有难度的,其中一个难点就是专业课的信息和专业课的命题走向的获取,当时我们都不是很清楚,蒙着头自己学,去图书馆借了很多自动控制原理的资料书来看,我自我感觉学得还不错,当时我一个同学考电子科大的自动化,经常跑来问我自控的问题,我基本都能给他解答出来,他说我好牛逼,觉对没有问题,然而最后的结果是他考电子科大自动控制原理137,而我只考了96分。
浙大控制845自动控制原理大纲

《自动控制原理》参考书与考试大纲2014-06-26一:参考书目:《自动控制原理》,厉玉鸣等主编,化学工业出版社,2009年《自动控制原理》,孙优贤,王慧主编,化学工业出版社,2011年《自动控制原理》,胡寿松主编,科学出版社,2007年二:考试大纲1、控制系统的基本组成和数学模型掌握:控制系统的组成;控制系统的主要类型;线性连续时间系统的概念,微分方程模型,传递函数模型;方块图及其等效变换;信号流图;方块图化简;Mason增益公式;2、控制系统的时域分析方法掌握:典型输入信号;一阶、二阶系统的动态响应;控制系统动态响应的质量指标;控制系统的劳斯稳定判据;给定和扰动稳态误差分析;了解:高阶系统的响应及主导极点;PID控制方法对系统控制质量的影响;4、频率特性分析法掌握:系统频率特性的定义;典型环节的频率响应;系统频率特性的极坐标图;对数坐标图;非最小相位系统;Nyquist稳定性判据;控制系统的稳定裕度;基于开环频率响应的控制系统频率特性分析;了解:频率特性设计方法;5、根轨迹分析方法掌握:根轨迹的基本概念;绘制根轨迹的基本条件和规则;控制系统的根轨迹分析;广义根轨迹;了解:基于根轨迹方法的控制系统设计;6、采样控制系统掌握:采样过程及采样定理;零阶保持器;Z变换;采样系统的脉冲传递函数;连续模型的离散化;采样系统的数学模型及求解;采样系统的稳定性与稳态偏差分析;了解:数字PID控制器;最小拍采样控制系统的设计;7、状态空间方法掌握:系统状态空间描述,及其与传递函数之间的相互转化;状态转移矩阵的求取及性质,状态运动分析(状态方程的解);能控性、能观性的定义与判别;单入单出系统的能控、能观标准型;按能控性或能观性结构分解;状态反馈设计与极点配置;全维状态观测器设计;带状态观测器的状态反馈;了解:最小阶状态观测器设计;规范分解(同时按能控与能观进行分解);8、非线性系统分析掌握:典型非线性环节;描述函数分析法,及自激振荡(极限环)的参数求取与稳定性分析;相平面分析法;Laypunov稳定性基本定义和基本理论;了解:典型非线性环节的描述函数计算;线性系统的Lyapunov稳定性分析;。
(NEW)浙江大学845自动控制原理历年考研真题汇编(含部分答案)

目 录2014年浙江大学845自动控制原理考研真题(回忆版)2013年浙江大学845自动控制原理考研真题(回忆版)2012年浙江大学自动控制原理考研真题(回忆版)2011年浙江大学845自动控制原理考研真题2010年浙江大学自动控制原理考研真题及详解2009年浙江大学自动控制原理考研真题(回忆版)2008年浙江大学845自动控制原理考研真题2007年浙江大学452自动控制原理考研真题2006年浙江大学452自动控制原理考研真题2005年浙江大学452自动控制原理考研真题2004年浙江大学452自动控制原理考研真题及详解2003年浙江大学457自动控制原理考研真题2002年浙江大学自动控制原理考研真题2001年浙江大学581自动控制原理考研真题及详解2014年浙江大学845自动控制原理考研真题(回忆版)一、已知一个共轭极点的阻尼比在-1到0之间,求根轨迹的出射角。
二、已知A、B、C阵,其中A阵(5×5)是能控标准型阵。
求1.方程有几个极点在右半轴2.判断能控能观性三、求二型系统的相角裕度最大值时的K值。
四、一单回路负反馈系统,前线通道时(s+5)(s+10)(s+4),反馈通道是0.5s+1,已知阻尼比,求K值和稳态输出。
五、Z变换1.求脉冲传递函数2.输出Z变换六、已知一个双输入的状态空间方程七、双变量传递函数,分子一个a,分母一个k1.当k和a为什么情况下时,系统保持稳定2.画出根轨迹图八、伯德图里有两个二阶衰减振荡环节九、1.求传递函数2.状态反馈3.状态观测器极点都配制到-2r4.已知超调量和tp的限制,求阻尼比和wn 5.当观测器反应速度比反馈快3倍2013年浙江大学845自动控制原理考研真题(回忆版)一、已知单位阶跃相应的曲线为一个单调递增最后趋于稳态的曲线,求系统的传递函数和微分方程。
二、已知一个带干扰的系统方框图1.化简方框图求输入和误差传递函数。
2.要求干扰输入时,输出不受干扰的影响。
浙江大学04年自动控制原理考研题及答案

则沿任一轨迹,V(x)对时间的导数
是负定的,这说明V(x)沿任一轨迹连续地减小,因此,V(x)是一个李亚普诺夫函数。根据李亚普诺夫稳定性定理,该系统渐近稳定。
又由于V(x)随x偏离平衡状态趋于无穷而变为无穷,即当 时,
故系统是大范围一致渐近稳定的。
十三、(10分/150分)已知系统的状态空间表达式: , ,试设计观测器,使其极点为: -1.8+j2.4,-1.8-j2.4。
S10.25-0.25
S00.25
六.(10分/150分)某系统的单位阶跃响应为 ,试求系统的频率特性。
解:
因为: ;所以:
系统的频率特性为
七.(5分/150分)某系统的传递函数是 ,问:若要求系统为完全能控能观,应如何选择b?
解:对于单变量系统,系统的完全能控能观意味着不存在传递函数的零极点相消
因为
解:(1)设系统开环特征多项式为
(2)因为经状态反馈后闭环系统的特征多项式为
(3)而期望的闭环特征多项式为:
(4)上两式应该相等,故易知:
(5)原系统的能控标准形: ,
十二、(10分/150分)--该题为二选一题,另一题是关于观测器的。研究由方程
描述的系统的稳定性。
解:命 ,可求得系统的平衡状态为原点,即
解:(1)判别可观性: ;系统可观
(2)观测器期望方程:
状态观测器的闭环特征多项式:
上两式应当相等,所以 ;即观测器:L=[29.63.6]
图4
解:
由终值定理:
五.(20分/150分)系统如图5所示,绘制以 为可变参数的根轨迹,并指出系统稳定条件下的 值取值范围,以及系统阶跃响应无超调时 的取值范围
图5
浙江大学控制科学与工程系自控原理05-95考研初试题(一)-数学模型
浙江大学控制系自动控制原理近年考研题分章集锦(一)(第一、二章: 基本概念及数学模型――连续部分)浙江大学二〇〇五年攻读硕士学位研究生入学考试试题考试科目编号注意:答案必须写在答题纸上,写在试卷或草稿纸上均无效。
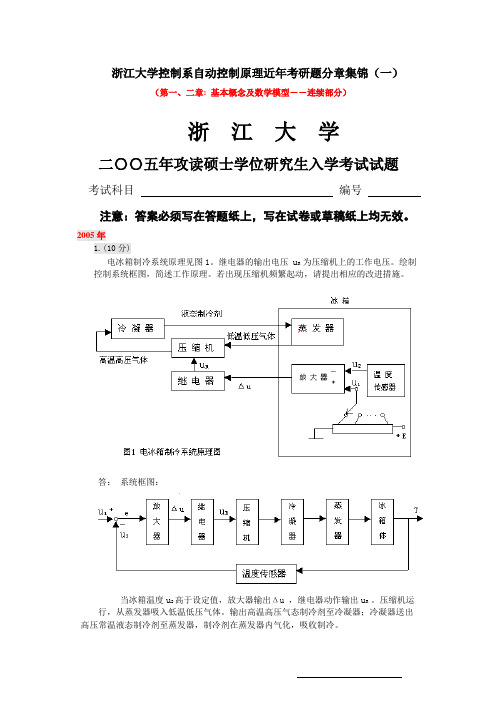
2005年1.(10分)电冰箱制冷系统原理见图1。
继电器的输出电压u R 为压缩机上的工作电压。
绘制控制系统框图,简述工作原理。
若出现压缩机频繁起动,请提出相应的改进措施。
答:系统框图:当冰箱温度u2高于设定值,放大器输出Δu ,继电器动作输出u R 。
压缩机运行,从蒸发器吸入低温低压气体。
输出高温高压气态制冷剂至冷凝器;冷凝器送出高压常温液态制冷剂至蒸发器,制冷剂在蒸发器内气化,吸收制冷。
改进措施:调小放大器放大倍数,或选用灵敏度较小的继电器,或者两者兼而用之。
2.(10分)系统框图见图2-1,要求将系统等效变换成图2-2,图2-3框图结构,并求H(S),G(S)表达式。
图2-1 图2-2 图2-3 解:H(S)= 1+2() KG SG(S) =2004年一.(20分/150分)如图1所示,U1(t),U2(t)分别是输入电压和输出电压。
X3,X2分别是输入位移和输出位移,X1则是C点位移。
f1, f2是粘滞阻尼系数,k1, k2是弹性系数。
求两系统的传递函数,并分析两系统变量间的相似关系。
图 1解:1)(1)(1111)()(212211221212211221212211112212+++++++=++++=S C R C R C R S C C R R S C R C R S C C R R S C R SC R S C R SC R s U s U 1)111(11)11(1)()(2122112212122112212132+++++++=S K f K f K f S K K f f S K f K f S K K f f S X S X两相似系统变量间对应关系:电压U---------------------------位移X电阻R---------------------------粘滞阻尼系数f 电容C---------------------------弹性系数的倒数K1二.(10分/150分)用方块图化简法,求图2所示系统的闭环传递函数图 2解:321341431131213213414311311)()(G G G G G G G G G G G G G G G G G G G G G G G G G G S R S Y +++--+++++--=∴2003年1.(10分/150分)求理想运算放大器的传递函数)()(s Ui s Uo ,结构图如下:解:理想运放∞→λZ ,流入运放电流0,0→→B U i)()()()()()()()()()(:)(0)()()()()()()()()()()()()()(414243324232142321s Z s Z s Z s Z s Z s Z s Z s Z s U s U s U U s Z s U s Z s U s U s Z s U s U s Z s U s U s Z s U s U i i i i i i O F B F F B O F F B B i ++==⎪⎪⎩⎪⎪⎨⎧--=--=-+=-=∴得消去即:2003年第1题示意图2.(10分/150分)求右图的传递函数)()()(s U s y s G =解:)()()(1)()()()()(1)(1)()()(1)()(21121221122*12s G s G s G s G s G s G s G s G s G s G s G s G s G s G +--=-+=+=∴2002年 1.(10分/100分)R-L-C 网络如图所示,信号源内阻为零,U r (t)为输入变量,U 0(t)为输入变量,试求电网络的状态变量表达式。
浙江大学控制理论2003-2009真题答案
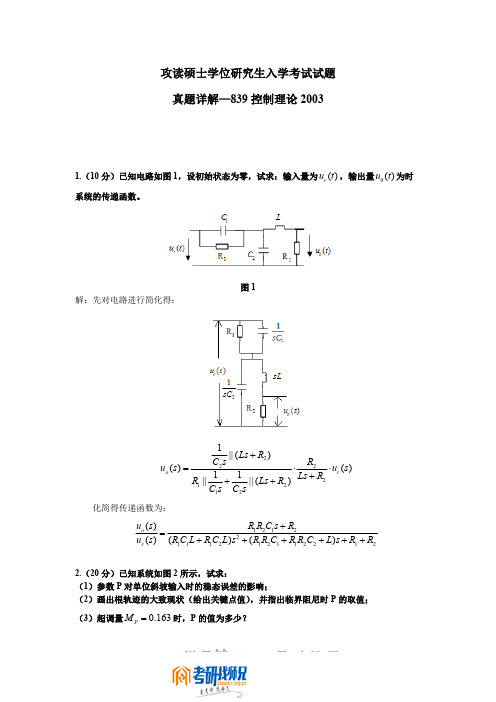
1.(10 分)已知电路如图 1,设初始状态为零,试求:输入量为 ur (t ) ,输出量 u0 (t ) 为时 系统的传递函数。
图1 解:先对电路进行简化得:
1 || ( Ls R2 ) C2 s R2 uo ( s ) ur ( s ) 1 1 Ls R 2 R1 || || ( Ls R2 ) C1s C2 s
(2)相轨迹为
(3)由相轨迹图可知,系统的稳态误差为零。
7.(15 分)有系统 平衡状态及其稳定性。
& x 1 kx2 (k 为大于 0 的常数) ,应用 Lyapunov 第二法分析系统的 & x 2 x1
& 0 xe 0 为系统的平衡状态。 解:由 x
0 k & x x 1 0
(2)系统特征方程为 z 4.95 z 0.368 0 ,
2
令z
r 1 ,上式化简后,得 r 1
6.32r 2 1.264r 3.584 0
劳斯表中第一列有一次符号变化,所以有一根位于右半平面,即对应有一个根位于平面 单位圆之外,系统不稳定。 6.(15 分)已知带有库仑摩擦的随动系统如图 5 所示,设输入信号为零,初始条件为:
& & Qe
& de &de & de de & e dt de dt de
& de & 2e 1 0, e & 0 e de & de & 2e 1 0, e & 0 e amp; 0 (e ) 2 c, e 2 2 2 & e 1 & 0 (e ) 2 c, e 2 2
浙大控制系近年考研题分章集锦二)-时域分析

将已知条件:
X(s)
=
1 s3
, G1(s)
=
K1, G2(s)
=
K2 s(T1s +1)
, G3(s)
=
as2 +bs T2s +1)
代入上式。得
Y(s) == G2 (G1 + G3) =
K2 (as2 + (b + K1T2 )s + K1)
X(S)
1+ G1G2 T1T2s3 + (T1 + T2 )s2 + (1+ K1K2T2 )s + K1K2
、A。
解:根据状态转移矩阵的运算性质有:
φ −1(t)
=
φ (−t)
=
3et e2t
− e2t + 4et
3et − 2e2t
−
2e2t
+
2et
A=
φ(0)Βιβλιοθήκη =− −3e−t + 2e−2t 2e−2t − 4e−t
− 3e−t 4e − 2t
+ 4e−2t
− 2e−t
t=0
=
−1 − 6
1 2
11、(20 分/150 分)已知下图所示系统的单位阶跃响应曲线,试确定参数 k1,k2 和 a 值
(提示:0
tp = ω0
π 1−ξ 2
−ξπ
σ %= e 1−ς 2 )
解:
2003 年第 3 题示意图
y(∞) = 2
σ% = 2.18 − 2 = 0.09 2
t p = 0.8
闭环传递函数G(s) = k1k2 s 2 + as + k2