机械动力学仿真33页PPT
机械动力学仿真
2.1 动臂工作仿真
当采用动臂液压缸进行挖掘时(斗杆液 压缸和铲斗液压缸不工作),可以得到最大 挖掘半径和最长挖掘行程。在液压缸和活 塞杆之间的移动副上添加运动来模拟挖掘 机的运动过程
2.2 斗杆液压缸工作仿真
仅以斗杆液压缸工作进行挖掘时,铲斗的 挖掘轨迹系以动臂与斗杆的铰点为中心,斗齿 尖至该铰点的距离为半径所作的圆弧线,同样, 弧线的长度与包角决定于斗杆液压缸的行程。 当动臂位于最大下倾角并以斗杆液压缸进行挖 掘工作时,可以得到最大的挖掘深度,并且也 有较大的挖掘建筑行程,在较坚硬的土质条件 下工作时,能够保证装满铲斗,故中小型挖掘 机在实际工作中常以斗杆液压缸工作进行挖掘。
分析过程中会应用虚拟样机技术 (viurtalProtoytPing),将液压挖掘机工 作装置用三维造型软件UG进行建模,并导 入ADAMS【机械系统动力学自动分析 (Automatic Dynamic Analysis of Mechanical Systems)】中得到虚拟样机模 型
1 工作装置虚拟样机的建立
当然,这些研究过程是我们的一个参考, 本小组对本课程了解肤浅,丧不足以如此纯属 的运用恰当的方法进行研究,不过在本次的研 究活动中,我们了解到,机械系统动力学与仿 真这门课是一门本专业的综合性学科,研究过 程中会应用到机械原理基本知识,机械学科常 见辅助软件的应用,有限元的分析,和一系列 数据的处理能力,对本专业的基础知识更是有 很高的要求,同时在实际的生产研究中也有着 举足轻重的作用,所以我们必须要认真严肃的 对待该学科,以求下次能自己做出自己的作品.
挖掘机的分类
• 以下是常见挖掘机的分类: 挖掘机分类一:常见的挖掘机按驱动方式有内燃机驱动挖 掘机和电力驱动挖掘机两种。其中电动挖掘机主要应用在高原 缺氧与地下矿井和其它一些易燃易爆的场所。 挖掘机分类二:按照行走方式的不同,挖掘机可分为履带 式挖掘机和轮式挖掘机。 挖掘机分类三:按照传动方式的不同,挖掘机可分为液压 挖掘机和机械挖掘机。机械挖掘机主要用在一些大型矿山上。 挖掘机分类四:按照用途来分,挖掘机又可以分为通用挖 掘机,矿用挖掘机,船用挖掘机,特种挖掘机等不同的类别 挖掘机分类五:按照铲斗来分,挖掘机又可以分为正铲挖 掘机和反铲挖掘机。正铲挖掘机多用于挖掘地表以上的物料, 反铲挖掘机多用于挖掘地表以下的物料。
高等机构学第十一章-机械系统动力学课件.ppt
n
n
Pi
等效构件作转动
M e Pi ,
i 1
Me
i 1
n
n
Pi
等效构件作移动 Fev Pi , i 1
Fe
i 1
v
n
Pi 机构中所有构件在运动过程的瞬时功率之和
i 1
Me
Je
Fe
me
v
注意: M e M ed M er
等效构件的力矩或力的运动方程的微分形式为:
d 2 dJ M d M r J dt 2 d
d
2 d f (,)
d
J
将其代入下面的欧拉公式,则:
i1
i
(
d d
)
i
i
M
(
i
,
i
)
2
2
J ii
(
dJ
d
)
i
用差商 Ji1 Ji Ji1 Ji
i1 i
代替
(
dJ
d
)
i
则上式变换为:
i1
3J i J i1 2Ji
i
M (i ,i ) J i i
的近似值约为:
1 2
(i
i1)t
F1
m
( F jx
j 1
x j q1
F jy
y j q1
M
j
j
q1
)
F2
m
( F jx
j 1
x j q2
F jy
y j q2
Mj
j )
q2
……
Fn
m
( F jx
j 1
x j qn
F jy
y j qn
机械原理ppt课件完整版

齿轮传动的设计步骤
包括选择齿轮类型、确定齿轮模 数、齿数、压力角等参数,进行 齿轮强度校核等。
齿轮传动的应用
广泛应用于各种机械设备中,如 汽车、机床、工程机械等。
链传动的设计与分析
链传动的类型
包括滚子链传动、齿形链传动等。
链传动的设计步骤
包括选择链条类型、确定链条节距、链轮齿 数等参数,进行链条强度校核等。
定义与研究对象
机械系统动力学是研究机械系统在力作用下的运动规律及其与力的相互关系的学科。它主要 关注机械系统在外力作用下的运动状态,如速度、加速度、位移等的变化规律。
基本术语与概念
包括力、质量、加速度、动量、动能、势能等,这些术语和概念是描述机械系统运动状态的 基础。
动力学原理
牛顿运动定律、动量定理、动能定理等是机械系统动力学的基本原理,它们揭示了机械系统 运动的基本规律。
命和可靠性。
检测装备
包括测量仪器、检测设备等,用 于对加工过程中的产品精度和质 量进行检测和控制,确保产品符
合设计要求。
先进制造技术与装备简介
数控技术
机器人技术
通过计算机编程控制机床等加工装备,实现 自动化、高精度和高效率的加工过程。
应用机器人进行自动化生产,提高生产效率 和产品质量,降低劳动强度和生产成本。
2023
PART 03
机械传动与驱动
REPORTING
机械传动的类型和特点
摩擦传动
螺旋传动
利用摩擦力传递动力和运动的传动方 式,如带传动、摩擦轮传动等。其特 点是结构简单、成本低廉,但传动效 率较低且易磨损。
利用螺旋副传递动力和运动的传动方 式,如螺旋千斤顶、螺旋压力机等。 其特点是结构简单、自锁性好,但传 动效率较低。
机械系统动力学-PPT课件
2
,可求解等效转动惯量:
n v i 2 si2 J J ( ) m ( ) e si i i i 1 1
HIGH EDUCATION PRESS
第十四章 机械系统动力学
1.作定轴转动的等效构件的等效参量的计算
等效力矩的计算:
等效构件的瞬时功率:P M e
系统中各类构件的瞬时功率: P P F v cos i 'M i i i'' i si i
0 Md tan 0 n tan Mn
M M n 0 n M d 0 n 0 n ab
HIGH EDUCATION PRESS
第十四章 机械系统动力学
二、机械的运转过程
1.启动阶段 2. 机械的稳定运转阶段
3. 机械的停车阶段
第十四章 机械系统动力学
P P ' P ' ' M F v cos i i i i i i si i
第十四章 机械系统动力学
HIGH EDUCATION PRESS
1.作定轴转动的等效构件的等效参量的计算
整个机械系统的瞬时功率为:
P M F v cos i i i si i
i 1 i 1 n n
HIGH EDUCATION PRESS
3.机械的停车阶段
停车阶段是指机械由稳定运转的工作转数下降到零转
数的过程。
第十四章 机械系统动力学
HIGH EDUCATION PRESS
第二节 机械系统的等效动力学模型
一、等效动力学模型的建立 二、等效构件 三、等效参量的计算 四、实例与分析
第十四章 机械系统动力学
作往复移动的等 效构件的微分方 程
机械动力学.ppt
=0
e=0
me=m1r1+ m2r2 +mbrb=0
F2
m2
m1
r2
b
2
r1
O
mb rb
F1
1
x
mr─质径积
Fb
me=m1r1+ m2r2 +mbr1=0 mbrb= -m1r1- m2r2
(mbrb)x= -m1r1cos1- m2r2 cos2 (mbr1)x= -m1r1sin1- m2r2 sin2
率是什么关系?
M r r
M
0
dd
…………………②
同一减速器,总效率为1(不计摩擦);输入轴
角速度还是d 、扭矩还是Μd ;输出轴角速度还 是r 、扭矩为Μr0 。问:输出轴功率与输入轴功
率是什么关系?
M
0
rr
Mdd
…………………③
Mr r Mdd …………………①
Mrr
f21 = oQ
─ 通式,适用于移动副、滑动高副、滑动轴承。
o表征几何形状对摩擦力的影响。
θ
Q θ
①
N 21
N 21
2
2
②
3)o 总汇
(1) 简单平面移动副
o =
f21 1
2
N21 v12 P
Q
3)o 总汇
(2) V形槽移动副
o=/sin
θ
N 21 2
②
Q θ
①
N 21 2
3)o 总汇 比较槽面摩擦:o=/sin
M
0
dd
…………………②
机械动力学课件
三、 研究对象--以机械为研究对象
三大典型机构
连杆机构 凸轮机构 齿轮机构 组合机构
四、其它
1.学习机械动力学目的、意义 学习动力学分析问题的思想和基本方法,能够
解决一般动力学问题。 2.教材(见前言) 3.考核方式
开卷。
第一章 单自由度的机械系统动力学分析
§1-1 利用动态静力法进行动力学分析 一、思路
R F2
S = h φ ⋅ϕ , J1A , m2 , M1 , F2 S
求:角加速度
解:选凸轮为等效件
⎧ ⎪⎪
MV
=M
−F
v
ω
M 1 (驱)
r0
α
⎨
⎪ ⎪⎩
JV
=
J1A
+
S = h ϕ ⇒ φ
m2
S
ϕ
(v
ω
=
)2
h
φ
=
v
ω
MV
=
JVϕ ⇒
M
− F(h)
φ
= (J1A
+
m2
(h
φ
)2
)ϕ
解:选凸轮为等效件
M 1 (驱)
r0
α
MV
=
M1
−
F2
v2
ω1
S
=
2kϕϕ
⇒
v2
ω
=
S
ϕ
=
2kϕ
JV = J1A + m2 (2kϕ)2
M1
−
2kϕ F2
=
( J1 A
+
m2 (2kϕ)2 )ϕ +
1 ϕ 2
2
⋅ m2 (2k)2
机械动力学

机械动力学谷物淸选脯白勺运动学和动力学仿真谷物淸选蹄的构at与工作原現(―)杂占谷物淸选iW的构at与工作eg (二)・£負鱼」一«•■二7脱出物的运动学和动力学仿真模型脱出物在筛面的运动学和动力学仿真(一)初始化设计变量参数; 构理参数化棋型; 定义荷载并求解; 提取状态变址数值; 进行参数化分析; 定义优化变量; 设定约束条件; 进行优化分析O 脱出物在清选筛面的运动学动力学仿真(二) |;| 优化设计过程q lud&fy D・«A・n V HC i«Lvl> ・•・St.«n4u'4 ▼alue U 6Value 冷♦/- r«c«o1 ftal.Qw V0M 二J-»•:!«[11-WO♦ >•!(<t*]10.0厂AU E 0>qmqg x r<Mtr Utt of «12w»4—OK 1 1 Cootl 1设计参数变化对加速度的影响ol曲柄长度Lg、连杆长度S B、摇杆长度L BC,Lm、摆杆长度L申曲柄的转速:依次选取五个设计变量,DV-1、DV-2、DV-3、DV-4、DV-5!1DV^5DV DV DV DV4✓z4Xz选择曲柄转速DVJ5、摇*长度DV_3和摆杆氏度DV24作为关從参数电设计变量与约束条件设计变最:X — [xj •入2 ■入3 —[羽.r•F戌屮,泊选帅机恂曲抽转迷•单位为曲mr-消选》机构痛杆K腹.虹位为m:O—机初连朴长度.单•位为m・约束条件为:0・12m< r空・15m0.10m匸r; <0J4m 280r/min£zr 三340rmin 转换为设汁变昼为:OJ2m:a)V_3<0-15m0・10mvDV_4 <0.14m1680° s^DV 5 仝2040° /s伏化设计8目标函致就是炎d找出能便筛I:的杯粒运幼过冷中加速度较人.便r脱出物分A和脱出物分反皿优的机构莎数。
机械知识之机械系统动力学PPT课件( 40页)

过分追求机械运转的平稳性,将使飞轮过于笨重。
2)当JF与m一定时 , [W] - 成正比。即[W]越大,
机械运转速度越不均匀。
3)由于J≠∞,而[W]和m又为有限值,故 不可能
为“0”,即使安装飞轮,机械总是有波动。
4)J与m的平方成反比,即平均转速越高,所需飞轮
的转动惯量越小。故飞轮一般安装在高速轴上。
W < 0 ——亏功
t
启动 稳定运转 停车
停车时间由Wc决定。加快停车,需加制动。 启动阶段和停车阶段称为过渡过程。
三、速度不均匀系数
ω
主轴角速度 = (t)
则平均角速度:
mi n ω max ω
m
1 T
T
d
0
O
T
φ
工程上常用其算术平均值表示:
ωm=(ωmax+ωmin)/2
A
B5
C
D
K
2
M
K O
R
6
1
4 3
工作介质
1—原动机 2—工作机 5—调节器本体 6—节流阀
§8-5 飞轮设计
飞轮设计的基本问题: 已知作用在主轴上的驱动力矩和阻力矩的变化
规律,在[]的范围内,确定安装在主轴上的飞轮
的转动惯量 JF 。
一、飞轮转动惯量计算
Md
驱动力矩Md (φ)和阻力矩Mr (φ) 是原动机转角的函数。
解:1)求Md
由于在一个循环内Md和
kNm Mr
Mr所作的功相等,故可得: Md
10
Md
1
2
2
0
Mrd
0
2 1 [1 21 02(1 2 21)0 ]5
《机械动力学》课件

02
车辆动力学在车辆稳定性与控制方面有着重要 的应用,例如研究如何设计控制系统来提高车
辆的稳定性、安全性以及行驶性能。
智能驾驶
04
智能驾驶技术离不开车辆动力学的研究,通过 建模和控制算法的优化,可以实现更加智能、
安全的自动驾驶。
航空动力学
飞行器标动题力学
航•空动文力字学内主容要研究 • 文字内容
飞•行器文在字空内中容的运动 规•律,文包字括内飞容行器的 起飞、巡航、着陆等 各个阶段的运动特性
的发展。
机器人动力学
机器人运动学与动力学
机器人动力学主要研究机器人的运动规律和力学特性,包 括机器人的关节、连杆、驱动器等各个部分的动力学特性 。
柔顺控制
柔顺控制是一种先进的机器人控制方法,通过引入柔顺性 来提高机器人的适应性和安全性,减少碰撞和振动。
机器人控制
机器人动力学在机器人控制方面有着重要的应用,通过建 立精确的数学模型和优化控制算法,可以实现机器人的精 确控制和自主运动。
角动量守恒定律指出,在一个封闭系统中,如果没有外力矩作用,系统的总角动量保持不变。公式表示为 ΔL=ΔL0,其中ΔL和ΔL0分别表示系统初态和末态的角动量变化量。
动能定理
总结词
描述物体动能的变化与外力做功之间的 关系。
VS
详细描述
动能定理指出,外力对物体所做的功等于 物体动能的变化量。公式表示为W=ΔE, 其中W表示外力对物体所做的功,ΔE表 示物体动能的增量。
详细描述
非线性系统是指系统的输出与输入不成正比的系统,其 动态行为非常复杂,难以预测和控制。非线性动力学主 要研究非线性系统的分岔、混沌、突变等现象,以及这 些现象对系统性能的影响。
智能机械动力学
机械建模与仿真PPT课件
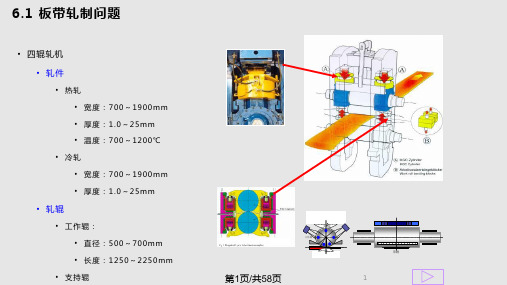
3)变形阻力在轧制区为常数
5
第5页/共58页
(3)静力平衡微分方程 取微单元, 在x面上有应力分量 sx ,t xy , t xz 在x+dx面上,应力分量相对x 截面有一个增量
根据微分单元体x方向平衡,∑Fx=0,有
简化并且略去高阶小量,可得
s x
x
t yx
y
t zx
z
Fbx
0
6
第6页/共58页
• 西姆斯解法——西姆斯单位压力公式
15
第15页/共58页
(9)总轧制力的计算
P
b0
b1 2
l 0
px
cosx
dx cosx
lr
tx
0
sin x
dx cosx
l lr
tx
sin x
dx cosx
b0
b1 2
l 0
px
cosx
dx cosx
lr
0
px
sin x
dx cosx
9
第9页/共58页
(5)塑性方程(屈服条件)
• 特雷斯卡(Tres ca )屈服条件(最大剪应力理论)
σ1 -σ3 = σs
(σ1 ≥σ2 ≥σ3 )
• 米塞斯(Mises)屈服条件(形状改变比能理论)
s1
s2
2
s 2
s3
2
s 3
s1
2
2s
2 s
或
2
sx sy sy sz
2
sz sx
(4)轧制变形区内的微分方程 前后滑区
• 前滑区:轧件速度大于轧辊速度 • 后滑区::轧件速度小于轧辊速度
在后滑区接触弧上某点(x,y)处取一微分体积 abcd • 宽度:dx, • 高度:y ~ (y+dy)