上肢康复机器人的研究
上肢康复机器人研究现状的分析

2、技术水平
近年来,随着人工智能、机器视觉等技术的不断发展,上肢康复机器人的技 术水平也得到了不断提高。目前,智能型康复机器人已经成为上肢康复机器人的 主流,其采用的技术包括机器视觉、深度学习、神经网络等。这些技术的应用使 得上肢康复机器人能够更好地识别患者的意图和运动状态,从而进行更加精准的 康复治疗。
上肢康复机器人研究现状的分 析
目录
01 一、上肢康复机器人 的发展历程
03
三、上肢康复机器人 的优缺点评价
02
二、上肢康复机器人 的研究现状
04 参考内容
随着科技的不断发展,康复机器人已经成为了现代医疗领域中的重要一环。 其中,上肢康复机器人作为康复机器人的一个重要分支,对于改善患者上肢运动 功能、减轻医护人员工作负担等方面具有重要意义。本次演示将对上肢康复机器 人的研究现状进行分析,并探讨未来的发展方向。
感谢观看
二、上肢康复机器人发展的现状
1、市场前景
随着人们健康意识的提高和医疗技术的不断发展,上肢康复机器人的市场需 求正在不断增长。目前,全球康复机器人市场已经进入了快速发展的阶段,据统 计,到2025年,全球康复机器人市场规模将达到33亿美元。
2、产品特点
上肢康复机器人主要针对上肢运动功能障碍患者进行康复训练,产品特点主 要包括以下几个方面:
4、探索人机融合技术:未来,人机融合技术将会成为一个重要的研究方向。 通过将人类的智能和机器的能力相结合,可以进一步提高机器人的智能化程度和 工作效率。同时,这也将为人类提供更加便捷、高效、个性化的服务体验。
5、加强人机交互研究:人机交互是影响机器人使用体验的关键因素之一。
参考内容
随着现代医疗技术的不断进步,康复机器人作为医疗器械的一种,正在逐渐 受到人们的和重视。其中,上肢康复机器人作为康复机器人的一个重要分支,对 于帮助上肢运动功能障碍患者恢复肢体功能具有重要意义。本次演示将对上肢康 复机器人的发展现状进行分析与研究,旨在为相关领域的发展提供参考。
上肢康复机器人的设计与控制研究

上肢康复机器人的设计与控制研究近年来,随着人口老龄化的加剧和慢性疾病的增多,康复机器人被广泛应用于康复领域。
上肢康复机器人作为康复机器人中的重要组成部分,在帮助患者恢复上肢功能方面具有重要意义。
本文旨在探讨,以期为康复领域的发展提供新的思路和方法。
首先,上肢康复机器人的设计是关键的。
在设计过程中,需要考虑患者的具体情况和康复需求,以确保机器人能够满足患者的康复训练需求。
针对不同类型的上肢运动障碍,可以设计不同类型的康复机器人,例如适用于握拿功能恢复的机器人、适用于肩关节功能恢复的机器人等。
此外,还需要考虑机器人的舒适性和用户友好性,以提升患者的康复体验。
其次,上肢康复机器人的控制是实现有效康复训练的关键。
控制系统的设计需要考虑到患者的运动特点和康复目标,确保机器人能够提供个性化的康复训练。
传感器技术在控制系统中起着重要作用,可以实时监测患者的运动状态,并根据监测结果调整机器人的运动模式。
此外,虚拟现实和增强现实技术的应用也可以提高康复训练的效果,增加患者的参与度和兴趣。
最后,需要强调的是上肢康复机器人的设计与控制研究还处于初级阶段,尚有许多挑战和机遇。
例如,如何实现机器人与患者之间的良好互动,如何提高机器人的精准度和灵活性,如何实现机器人与其他康复设备的协同工作等问题都需要进一步研究和探索。
未来,可以通过整合人工智能、机器学习等先进技术,不断优化上肢康复机器人的设计与控制,提升康复训练的效果和效率。
梳理一下本文的重点,我们可以发现,上肢康复机器人的设计与控制研究具有重要意义,对提高康复训练的质量和效果具有重要意义。
通过不断深入研究和探索,相信上肢康复机器人将在未来发挥更加重要的作用,为康复领域的发展带来新的希望和机遇。
希望本文的探讨能够为相关领域的研究者和从业者提供参考和启示,推动上肢康复机器人的研究与实践取得更大的成就。
上肢康复机器人联合镜像疗法对脑卒中偏瘫患者上肢运动功能的影响
上肢康复机器人联合镜像疗法对脑卒中偏瘫患者上肢运动功能的影响摘要目的:探讨应用上肢康复机器人联合镜像疗法对脑卒中后偏瘫病人上肢运动功能的影响。
方法:选取2022年09月至2023年03月在滨州市中医医院康复科接受康复治疗,符合纳入与排除标准的脑卒中偏瘫患者80例。
将两组患者随机分为联合组(40例)与对照组(40例)。
其中,对照组给予常规康复训练,联合组则是在常规康复训练的基础上,加入了上肢康复机器人与镜像疗法,展开对病人的治疗。
康复治疗4周后,应用Fugl-Meyer上肢评定量表(FMA-UE)、Barthel指数评定量表等评估患者康复情况。
结果:治疗前两组患者的得分无明显差异,在经过4周的治疗之后,两组患者的四种量表得分都较治疗前有了显著的提升,且联合组患者的上肢运动功能的改善更加显著,其恢复效果也要优于对照组,差异有统计学显著性,P<0.05。
结论:康复机器人结合镜像疗法,可以有效地改善脑卒中患者上肢运动功能和日常生活活动能力,是一种高品质、高效率的康复方式。
关键词:上肢康复机器人镜像疗法上肢运动功能1前言1.1研究背景“脑卒中”又称“中风”“脑血管意外”,是一种急性脑血管疾病,是由于脑部血管突然破裂或因血管阻塞导致血液不能流入大脑而引起脑组织损伤的一组疾病,包括缺血性和出血性卒中[1]。
其中缺血性脑卒中发生率较高,约为60%~70%。
其发病年龄为40多岁,且男性多于女性,严重时可致患者死亡。
脑卒中后六个月的偏瘫患者,手臂功能大多没有恢复,只有5%~20%的患者完全恢复了功能[2]。
因此许多卒中后患者具有较低的上肢功能水平,而上肢能够自主活动是脑卒中患者重新获得生活独立性的主要因素,这也不同程度地影响患者未来的生活品质以及重返社会、家庭的信心。
2资料与方法2.1研究对象来源选取2022年09月至2023年03月在滨州市某医院康复科住院或门诊接受康复治疗,符合标准的脑卒中偏瘫患者80例。
上肢康复机器人的研究

上肢康复机器人的研究上肢康复机器人是一种能够辅助患者进行上肢康复训练的机器人系统,旨在帮助患者恢复手臂、肩膀等上肢肌肉功能,并提供康复过程的监测和评估。
随着近年来康复机器人技术的快速发展,上肢康复机器人在康复医学领域受到了越来越多的关注和研究。
上肢康复机器人主要通过模拟人体上肢运动的方式,向患者提供不同程度的力量、力矩支持和移动指导,以促进上肢肌肉的康复训练。
它可以帮助患者进行肌肉训练、关节活动、手握能力恢复等多个方面的康复训练,提高患者的活动能力和生活质量。
研究表明,上肢康复机器人与传统的人工物理治疗相比具有以下几个优势。
首先,机器人系统能够提供精确的控制和力矩支持,可以根据患者的康复进展进行动态调整,使训练更加个性化和有效。
其次,机器人可以重复进行康复训练,避免了传统治疗中医师助力的主观性和风险性,使康复训练更加安全和可靠。
此外,机器人系统还能够记录和存储患者的康复数据,为康复进程的评估和分析提供了有力的工具。
在上肢康复机器人的研究中,主要包括机械设计、控制算法和康复训练的评估等方面。
机械设计是研究的基础,主要涉及机器人的结构设计、传动系统、力传感器等方面。
控制算法是机器人运动实现的关键,通过实时监测患者的运动状态和力矩需求,控制机器人的运动和力矩输出。
康复训练的评估是判断机器人康复效果的重要指标,可以通过记录患者的运动范围、速度、精准度等数据,分析患者的康复情况并随时调整训练方案。
在机器人结构设计方面,研究者提出了多种不同的方案。
例如,可穿戴式机器人适用于重度偏瘫患者,其结构类似于肩关节外骨骼,可以通过电机和传感器实现对上肢运动的辅助和控制。
桌面式机器人适用于轻度至中度偏瘫患者,可通过桌面上的操纵杆或触摸屏进行操控。
另外,还有些机器人设计为具有可调节高度和角度等功能的移动式机器人,可以适应不同患者的需求和康复阶段。
在控制算法方面,研究者采用了多种方法来实现机器人的运动控制。
PID控制是一种常用的方法,可以根据患者的运动需求实现力矩的协调输出。
康复机器人上肢运动系统控制策略

在此模式下,康复机器人通过识别患者的主动运动意图并结合预设的轨迹和运动速度来带 动患者进行上肢运动,这种模式主要适用于患者具有一定的上肢肌肉力量和协调性,但不 足以完成全部的上肢运动的情况。
基于运动捕捉技术的控制策略
光学运动捕捉技术
通过在患者身体上设置多个光学标记,利用多个高清摄像机捕捉 标记的位置变化,从而获取患者的上肢运动信息。
03
上肢运动模式和控制策略 设计
上肢运动模式分类与选择
被动运动模式
在此模式下,康复机器人主要通过预设的轨迹和运动速度来带动患者进行上肢运动,患者 只需跟随机器人的动作进行被动运动,这种模式主要适用于患者上肢肌肉力量和协调性严 重不足的情况。
主动运动模式
在此模式下,康复机器人通过内置的传感器和算法识别患者的主动运动意图,并辅助患者 进行上肢运动,这种模式主要适用于患者具有一定的上肢肌肉力量和协调性,但不足以完 成全部的上肢运动的情况。
06
结论与展望
研究成果与贡献
提出了一种基于生物力学模型的上肢运动控制系统,能够实现精准的关节角度控 制和运动轨迹规划。
针对康复机器人的应用场景,设计了基于肌电信号的上肢运动功能检测算法,实 现了对上肢运动功能的快速评估和反馈。
针对上肢康复训练的特殊需求,开发了一种基于虚拟现实技术的上肢康复训练系 统,能够提供沉浸式的康复训练体验,提高患者的康复效果。
当前研究的不足
现有的康复机器人控制策略主要集中在运动功能实现方面, 对于患者运动协调性和适应性的研究尚不完善,因此需要进 一步探讨。
研究现状与发展
康复机器人的研究现状
目前,康复机器人的研究已经取得了一定的进展,各种类型的康复机器人不 断涌现,但它们主要集中在运动功能实现方面,对于患者运动协调性和适应 性的研究尚处于初级阶段。
毕业设计(论文)-上肢康复机器人结构设计及运动仿真-有图纸
第1章绪论全套完整版19张CAD图纸,联系1538937061.1 概述据报道,我国60岁以上的老年人已有1.43亿,占全国人口的11%,到2050年将达到4.37亿。
在老龄人群众中有大量的脑血管疾病或神经系统疾病患者,这类患者多数伴有偏瘫症状[1]。
近年由于患心脑血管疾病使中老年患者出现偏瘫的人数不断增多,而且在年龄上呈现年轻化趋势。
与此同时,由于交通运输工具的迅速增长,因交通事故而造成神经心痛损伤或者肢体损伤的人数也越来越多。
在我国数以百万计的有神经科疾病病史和受到过意外伤害的患者需要进行康复治疗,仅以中风为例,每年大约有600,000中风幸存者,其中的二百万病人在中风后存在长期的运动障碍。
随着国民经济的发展,这个特殊群体已得到了更多人的关注,为了提高他们的生活质量,治疗、康复和服务于他们的产品的技术和质量也在相应地提高。
随着机器人技术和康复医学的发展,在欧洲、美国和日本等国家,医疗康复机器人的市场占有率呈逐年上升的趋势,仅预测日本未来机器人市场,2005年医疗、护理、康复机器人的市场份额约为250,000美元,而到2010年将上升到1,050,000美元,其增长率在机器人的所有应用领域中占据首位。
因此,服务于四肢的康复设备的研究和应用有着广阔的发展前景[2]。
康复机器人是康复设备的一种类型。
康复机器人技术早已广受世界各国科研工作者和医疗机构的普遍重视,其中以欧美和日本的成果最为显著。
在我国康复医学工程虽然得到了普遍的重视,而康复机器人研究仍处于起步阶段,一些简单康复器械远远不能满足市场对智能化、人机工程化的康复机器人的需求,有待进一步的研究和发展。
由于康复训练机器人要与人体直接相连,来带动肢体进行康复训练,所以对驱动器的安全性、柔性的要求较高。
康复肢体运动功能用机械肢体组合系列机器人,是多种同类机器人属于机器人领域,解决了本人发明的实用新型专利半身不遂患者康复学步机,只能带动人的大小臂大小腿康复运动功能,而不能带动手脚各关节运动的重大不足,主要技术特征是将半身不遂患者康复学步机略加改进后,在学步机的小臂绞链杆上安装了可以带动人手腕关节手指各个关节都能运动的机械手托板,在小腿铰链杆上安装了可以带动人脚踝脚指各个关节都能运动的机械脚托板后实现的,用途是康复肢体运动功能,带动患肢的各个关节、每块骨骼、每块肌肉、每个筋键、每条神经都在作患者万分渴望而大脑又支配不了的动作,通过较长时间的被动运动锻炼,最终使残疾人患肢的主动运动功能得到康复。
上肢康复机器人训练控制策略研究开题报告

上肢康复机器人训练控制策略研究开题报告研究背景与意义:四肢康复机器人已经成为康复治疗的重要手段之一,其通过运动学支撑和力矩控制对患者肌肉进行训练,提高肢体运动能力,促进神经系统康复。
然而,目前多数四肢康复机器人存在着控制精度不高、训练难度逐渐降低、缺乏个性化训练等问题。
针对这些问题,本研究拟开展上肢康复机器人训练控制策略研究,力求构建高精度、高度个性化、灵活性强的上肢康复机器人训练控制策略,提高上肢康复机器人的康复效果和应用范围,为上肢康复治疗提供有效的技术支持。
研究内容与方法:1.设计上肢康复机器人控制策略,以运动学支撑和力矩控制为基础,针对上肢康复训练中常见的运动动作和康复路径设计控制算法,包括基于模型的控制算法和基于非线性控制的算法。
2.采集患者上肢运动数据,基于机器学习算法构建患者运动模型,实现个性化训练控制策略。
采用传感器、EMG信号等技术手段,获取患者上肢运动的数据,建立患者的运动特征模型,实现个性化训练控制策略。
3.设计上肢康复机器人虚拟现实训练系统,提高康复治疗的趣味性和病人的参与度。
利用虚拟现实技术,设计实时头显和手套操控界面,为患者提供更真实、更智能、更个性化的上肢康复训练体验。
4.开发上肢康复机器人训练控制系统,实现机器人的动态适应和自我修正,提高康复训练的安全性和有效性。
利用ROS等开源机器人操作系统,实现机器人控制系统对环境的感知和反馈,实现机器人动态适应和自我修正。
研究预期成果:本研究旨在构建一套高性能的上肢康复机器人训练控制策略。
具体成果包括:1.设计并实现上肢康复机器人控制策略,提高运动学支撑和力矩控制算法的控制精度和稳定性。
2.基于机器学习算法构建患者运动模型,实现个性化训练能力。
3.利用虚拟现实技术设计开发上肢康复机器人虚拟现实训练系统,提高康复治疗的趣味性和病人的参与度。
4.开发上肢康复机器人训练控制系统,实现机器人的动态适应和自我修正,提高康复训练的安全性和有效性。
上肢康复机器人研究进展
doi :10.3969/j.issn.1674-1242.2020.03.003上肢康复机器人研究进展余灵1,喻洪流21.上海理工大学康复工程与技术研究所(上海,200093)2.上海康复器械工程技术研究中心(上海,200093)作者简介:余灵,E -mail :1919821548@qq.com 【摘要】在社会老龄化问题日益加剧的形势下,上肢康复机器人技术的研究和发展意义重大,该文对上肢康复机器人的国内外研究进展进行了分类概述和分析,对上肢康复机器人的发展趋势进行了展望。
【关键词】人口老龄化;上肢康复机器人;机器人技术【中图分类号】R496【文献标志码】A文章编号:1674-1242(2020)03-0134-05Research and Development of Upper Limb Rehabilitation Robot TechnologyYU Ling 1,YU Hongliu 21.Institute of Rehabilitation Engineering and Technology ,University of Shanghai for Science and Technology (Shanghai ,200093)2.Shanghai Engineering Research Center of Assistive Devices (Shanghai ,200093)【Abstract 】Under the situation of increasing aging problems of society ,the research and development of up-per limb rehabilitation robot technology is of great significance.In this article ,the research progress of upper limb rehabilitation robot at home and abroad is classified ,summarized ,and analyzed ,and the development trend of up-per limb rehabilitation robot is prospected.【Key words 】population aging ,upper limb rehabilitation robot ,robotics 0引言随着人口老龄化问题的日益加剧,世界各地由中风引起的肢体功能障碍患者的人数逐年增加。
上肢康复机器人系统的研究与开发的开题报告

上肢康复机器人系统的研究与开发的开题报告一、研究目的:上肢功能恢复机器人系统是针对上肢功能障碍患者所研发的一款医疗康复设备。
本研究旨在通过研究上肢康复机器人系统的技术结构、康复机理以及康复效果,为上肢功能障碍患者提供更加准确、科学、有效的康复手段,提高其康复效果和生活质量。
二、研究内容:(1)上肢康复机器人系统的技术结构:本研究将对上肢康复机器人系统中的硬件结构进行分析和研究,了解其各部分的构成、性能和工作原理。
同时,对其软件系统的设计、实现和优化进行探究。
(2)上肢康复机器人系统的康复机理:本研究将通过系统的理论研究,了解上肢康复机器人系统在康复过程中的机理,深入探讨其对患者上肢运动恢复的作用和促进作用。
(3)上肢康复机器人系统的康复效果:本研究将对上肢康复机器人系统进行实验研究,获取其在康复过程中对患者的康复效果和生活质量的影响,通过对实验结果的统计和分析,提高康复机器人系统的性能和效果。
三、研究方法:(1)文献调研法:通过对国内外文献的研究,了解上肢康复机器人系统的发展历程、技术发展现状以及相关应用,为本研究打下坚实的理论基础。
(2)实验研究法:通过设计实验,验证上肢康复机器人系统在康复过程中的效果和实现效果的因素。
主要在运动学和动力学指标计算方面验证机器人的性能。
(3)数据处理法:通过对实验数据的收集、处理和分析,研究上肢康复机器人系统在康复过程中对患者康复效果的影响,为提高机器人的性能和效果提供科学的依据。
四、研究意义:本研究将对上肢康复机器人系统的技术结构、康复机理以及康复效果进行深入探究,为上肢功能障碍患者提供科学的康复手段,有效提高其康复的效果和生活质量。
同时,还将推动医疗康复技术的发展,促进智能医疗设备的创新与应用。
五、研究进度:本研究将分为三个阶段进行:第一阶段是文献调研阶段,在此阶段将系统地收集、整理、筛选有关上肢康复机器人系统的国内外文献资料,以此为基础明确研究任务和研究方法。
基于外骨骼的可穿戴式上肢康复机器人设计与研究

基于外骨骼的可穿戴式上肢康复机器人设计与研究一、本文概述随着科技的快速发展和人口老龄化趋势的加剧,康复机器人的研究和应用日益受到重视。
在众多康复机器人中,基于外骨骼的可穿戴式上肢康复机器人因其独特的设计理念和实际应用价值,成为了康复工程领域的研究热点。
本文旨在探讨基于外骨骼的可穿戴式上肢康复机器人的设计与研究,通过对其结构、功能、控制策略等方面进行深入分析,以期为该领域的研究提供有益的参考和借鉴。
本文首先介绍了上肢康复机器人的研究背景和意义,阐述了其在康复治疗中的重要性和迫切性。
接着,综述了国内外在该领域的研究现状和发展趋势,分析了现有技术的优缺点和面临的挑战。
在此基础上,提出了一种基于外骨骼的可穿戴式上肢康复机器人的设计方案,并详细介绍了其机械结构、传感器配置、控制系统等方面的内容。
本文的重点在于研究该康复机器人的运动学特性、动力学模型以及控制策略。
通过建立合理的数学模型,分析了机器人在不同运动模式下的运动学和动力学特性,为后续的控制算法设计提供了理论基础。
同时,针对康复机器人的特点,提出了一种基于人机交互力感知的智能控制策略,实现了机器人在康复训练过程中的自适应调整和优化。
本文通过实验验证了所设计的康复机器人的可行性和有效性。
通过对比实验和数据分析,证明了该机器人在上肢康复训练中具有良好的辅助效果和康复效果,为临床康复治疗提供了新的可能性和选择。
本文的研究内容对于推动基于外骨骼的可穿戴式上肢康复机器人的发展具有重要的理论意义和实践价值。
希望通过本文的探讨和研究,能够为相关领域的研究者和实践者提供有益的参考和启示。
二、相关理论基础与技术外骨骼,又称作动力外骨骼或动力服,是一种可穿戴设备,旨在为穿戴者提供额外的力量或运动能力。
外骨骼通常由硬质的外部框架和一组动力机构组成,可以通过机械、液压或气压传动系统驱动。
外骨骼技术最初是为了军事和航空航天应用而开发的,旨在增强士兵或宇航员的负载能力和运动性能。
基于表面肌电信号的上肢康复机器人变阻抗控制技术研究
电气传动2024年第54卷第1期ELECTRIC DRIVE 2024Vol.54No.1摘要:我国老龄人群肢体障碍者很多,运动康复技术是康复治疗的有效手段。
但医患比例严重失调难以使得人人都能享受到康复医疗服务。
康复机器人通过阻抗控制技术能够与人体进行一定的安全交互,但现有康复机器人多采用定阻抗控制,环境适应能力弱,难以应用于临床。
针对上述问题,提出一种变阻抗控制方法,以采集使用者的表面肌电信号为输入条件,通过改进随机森林算法训练识别使用者上肢的运动角度。
并配合末端力传感器,获得使用者的运动意图,再通过变阻抗控制器完成康复运动。
搭建了实验平台,并对轨迹跟踪和康复训练能力进行验证与评估。
结果表明所设计的控制器能够控制机器人完成康复运动。
关键词:康复机器人;表面肌电信号;改进随机森林算法;变阻抗中图分类号:TP13文献标识码:ADOI :10.19457/j.1001-2095.dqcd24614Research on Variable Impedance Control Technology of Upper Limb Rehabilitation Robot Based on sEMGWU Tong 1,LI Jian 1,LI Guodong 2,LIU Lu 1,ZHU Liguo 3,FENG Minshan 3(1.Automated Institute ,Beijing Institute of Technology ,Beijing 100089,China ;2.China Software Testing Center ,Beijing 100089,China ;3.Beijing Key Laboratory of Traditional Chinese Medicine Orthopedic Technology ,Wangjing Hospital of China Academy of Chinese Medical Sciences ,Beijing 100020,China )Abstract:There are many elderly people with limb disorder in China ,and exercise rehabilitation technology is an effective means of rehabilitation treatment.However ,the serious imbalance of doctor-patient ratio makes it difficult for everyone to enjoy rehabilitation medical services.Impedance control technology is used for the safe interaction between rehabilitation robot and human body.However ,constant impedance control is used in the existing rehabilitation robots ,which has weak environmental adaptability and is difficult to be applied in clinical practice.In view of the above problems ,a variable impedance control method was proposed.The user's surface electromyography signal (sEMG )was collected as input ,and his upper limb motion angle was trained and recognized by the improved random forest algorithm.With the end force sensor ,the motion intention was obtained ,and then the rehabilitation motion was completed by the variable impedance controller.The experimental platform was built ,and the track tracking and rehabilitation training abilities were verified and evaluated.The results show that the designed controller could control the robot to complete rehabilitation movement.Key words:rehabilitation robot ;surface electromyography signal (sEMG );improved random forest algorithm ;variable impedance基金项目:国家中医药管理局中医药创新团队及人才支持计划项目(ZYYCXTD-C-202003);北京理工大学实验室研究项目(2019BITSYA14);中国中医科学院科技创新工程《腰椎扳动类手法教学培训系统的研发》(C12021A02014)作者简介:吴彤(1997—),男,本科,Email :通讯作者:李国栋(1984—),男,博士,工程师,Email :基于表面肌电信号的上肢康复机器人变阻抗控制技术研究吴彤1,李健1,李国栋2,刘路1,朱立国3,冯敏山3(1.北京理工大学自动化学院,北京100089;2.中国软件测评中心,北京100089;3.中国中医科学院望京医院中医正骨技术北京市重点实验室,北京100020)我国目前由疾病导致的运动功能障碍人数较多[1],但专业的康复医师数量有限,因此更多要依赖康复机器人提供康复训练[2]。
上肢康复训练机器人的研究进展及前景
上肢康复训练机器人的研究进展及前景o 李会军 宋爱国东南大学仪器科学与工程系[摘 要] 利用机器人技术进行康复训练是康复治疗的重要手段之一。
依据康复医疗训练机器人技术的发展意义及社会需求,结合该领域的研究背景、发展现状及趋势,回顾了国内外近些年来的研究进展和主要研究成果,分析了本地上肢康复训练机器人、基于网络的康复训练机器人和基于虚拟环境的康复医疗训练机器人的系统构造及其应用,着重介绍了一对多力觉辅助远程康复训练机器人系统的设计与特点,指出了待解决的问题,并分析了上肢康复医疗训练机器人在机械设计、控制器设计、力觉辅助、多路复用及评价策略等方面的发展趋势。
[关键词] 机器人技术 力觉辅助 远程康复 虚拟环境 多路复用[Abstract] Stroke is common in the elderly society and robotics is one of the important methodsfor rehabilitation of stroke survivors and other people with upper-limb deformity. According tothe significance and social needs of rehabilitation robot, combined with background and development status in this field, progress and recent researches at home and abroad is reviewed. Systemstructure and application of local rehabilitation robot for upper-limb, rehabilitation robotbased on Internet and rehabilitation robot based on virtual environment are introduced respectively. Then the design and characters of multiplex force assistant tele-rehabilitation robotsystem is recommended in detail. The patients and the therapist are connected by Internet inserver/client framework. The patients receive the command of the therapist and exercise at home.Not only video images but also position and force information is sent to the server. In this way,the therapists can monitor/control the training procedure of several patients and adjust therapy planning according the status of rehabilitation. Main problems in this field are pointedout and development trends in mechanical design, controller design, force assistant, multiplexing and evaluation mechanism are emphasized.[Key words] robotics; force assistant; tele-rehabilitation; virtual environment; multiplexing一、引言我国是中风病的高发地区之一,在幸存者中约70% ̄80%的病人留有不同程度的残疾。
上肢康复训练机器人A2

机器人辅助训练具有精准度高、可重 复性好、可量化评估等优点,能够针 对患者个体差异提供个性化训练方案 ,提高康复效果。
传统训练的局限性
传统上肢康复训练方法主要依赖理疗 师手动辅助患者进行关节活动和肌力 训练,存在效率低下、人力成本高等 问题。
机器人A2简介
设计理念
机器人A2是一款专为上肢功能受损患者设计的康复训练机器人,旨在通过先进的机器人 技术和康复医学理念,为患者提供高效、个性化的上肢康复训练。
将传感器数据通过算法处理, 转化为机器人可识别的控制指 令。
通过视觉、听觉等反馈方式, 将机器人的运动状态实时呈现 给患者和医护人员,以便及时 调整训练方案。
安全性设计考虑
机器人结构设计中充分考虑安全性,采用轻质材料、圆滑边角等设计元素,降低意 外碰撞风险。
内置多重安全防护机制,如急停按钮、过载保护、电流监测等,确保机器人在异常 情况下能够及时停止运行。
上肢康复训练机器人A2
汇报人:XX
contents
目录
• 引言 • 上肢康复训练机器人技术原理 • 机器人A2功能与特点 • 机器人A2在上肢康复训练中的应用 • 机器人A2性能评价与比较 • 未来发展趋势及挑战
01
引言
目的和背景
康复训练的需求
机器人辅助训练的优势
随着人口老龄化及疾病负担的增加, 上肢功能受损的患者数量逐年上升, 对上肢康复训练的需求也日益迫切。
3
机器人A2还配备了先进的传感器和算法,能够准 确地识别患者的运动意图和姿势,提供更加自然 和舒适的运动体验。
临床试验结果展示
在一项涉及50名患者的临床试验中,使用机器人A2进行康 复训练的患者在上肢运动功能、肌肉力量和日常生活能力 等方面均取得了显著的改善。
六自由度外骨骼式上肢康复机器人设计

六自由度外骨骼式上肢康复机器人设计一、概述随着现代医疗技术的不断进步,康复机器人已成为辅助患者恢复肢体功能的重要工具。
六自由度外骨骼式上肢康复机器人作为一种先进的康复设备,旨在通过模拟人体上肢运动,帮助患者实现精准、高效的康复训练。
本文将对六自由度外骨骼式上肢康复机器人的设计进行详细介绍,包括其结构组成、工作原理、控制策略以及临床应用等方面的内容。
六自由度外骨骼式上肢康复机器人是一种可穿戴式的康复设备,能够紧密贴合患者上肢,通过精确控制各关节的运动,实现上肢的全方位康复训练。
该机器人具有六个自由度,可模拟人体上肢的各种复杂运动,为患者提供个性化的康复训练方案。
机器人还配备了智能传感系统,能够实时监测患者的运动状态,为医生提供精准的康复数据,从而优化康复治疗方案。
在结构组成方面,六自由度外骨骼式上肢康复机器人主要包括机械臂、驱动系统、传感系统以及控制系统等部分。
机械臂采用轻质材料制成,具有良好的穿戴舒适性和运动灵活性;驱动系统采用高精度电机,可实现精确、快速的运动控制;传感系统包括多个角度传感器和力传感器,能够实时监测机械臂和患者上肢的运动状态和交互力;控制系统则负责整合传感数据,实现机器人的运动规划和控制。
六自由度外骨骼式上肢康复机器人作为一种先进的康复设备,具有广泛的应用前景和市场需求。
本文旨在通过对该机器人设计的详细介绍,为相关领域的研究人员和技术人员提供参考和借鉴,推动康复机器人技术的不断发展和创新。
1. 上肢康复机器人的研究背景与意义随着人口老龄化的加剧以及各类事故、疾病对人们身体健康的威胁日益显著,上肢功能障碍患者数量呈现出逐年上升的趋势。
这些障碍往往由中风、外伤、神经系统疾病等多种原因引起,严重影响了患者的日常生活和工作能力,给个人、家庭和社会带来了沉重的负担。
寻求一种高效、安全的上肢康复治疗方法显得尤为重要。
在此背景下,上肢康复机器人的研究与应用应运而生,成为了医疗康复领域的重要发展方向。
简析上肢康复机器人的机械设计及仿真
简析上肢康复机器人的机械设计及仿真在上肢康复机器人中融入了机器人学、生物学、计算机科学、信息学、机械学、医院等诸多的学科,在开展其机械设计的过程中,综合的考虑各方面的影响因素,提升其应用性能是非常必要的,本文就主要针对此予以简单分析。
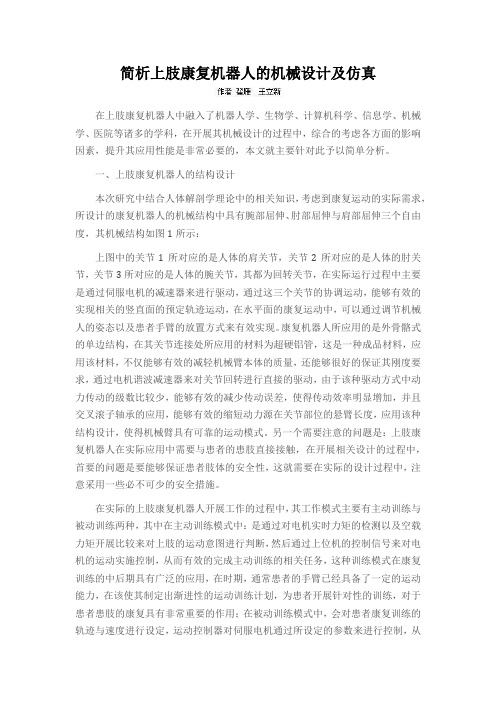
一、上肢康复机器人的结构设计本次研究中结合人体解剖学理论中的相关知识,考虑到康复运动的实际需求,所设计的康复机器人的机械结构中具有腕部屈伸、肘部屈伸与肩部屈伸三个自由度,其机械结构如图1所示:上图中的关节1所对应的是人体的肩关节,关节2所对应的是人体的肘关节,关节3所对应的是人体的腕关节,其都为回转关节,在实际运行过程中主要是通过伺服电机的减速器来进行驱动,通过这三个关节的协调运动,能够有效的实现相关的竖直面的预定轨迹运动,在水平面的康复运动中,可以通过调节机械人的姿态以及患者手臂的放置方式来有效实现。
康复机器人所应用的是外骨骼式的单边结构,在其关节连接处所应用的材料为超硬铝管,这是一种成品材料,应用该材料,不仅能够有效的减轻机械臂本体的质量,还能够很好的保证其刚度要求,通过电机谐波减速器来对关节回转进行直接的驱动,由于该种驱动方式中动力传动的级数比较少,能够有效的减少传动误差,使得传动效率明显增加,并且交叉滚子轴承的应用,能够有效的缩短动力源在关节部位的悬臂长度,应用该种结构设计,使得机械臂具有可靠的运动模式。
另一个需要注意的问题是:上肢康复机器人在实际应用中需要与患者的患肢直接接触,在开展相关设计的过程中,首要的问题是要能够保证患者肢体的安全性,这就需要在实际的设计过程中,注意采用一些必不可少的安全措施。
在实际的上肢康复机器人开展工作的过程中,其工作模式主要有主动训练与被动训练两种,其中在主动训练模式中:是通过对电机实时力矩的检测以及空载力矩开展比较来对上肢的运动意图进行判断,然后通过上位机的控制信号来对电机的运动实施控制,从而有效的完成主动训练的相关任务,这种训练模式在康复训练的中后期具有广泛的应用,在时期,通常患者的手臂已经具备了一定的运动能力,在该使其制定出渐进性的运动训练计划,为患者开展针对性的训练,对于患者患肢的康复具有非常重要的作用;在被动训练模式中,会对患者康复训练的轨迹与速度进行设定,运动控制器对伺服电机通过所设定的参数来进行控制,从而带动患者的患肢做一定速度与轨迹的康复训练,这在康复训练的早期,主要是以临床抢救为主要内容,这能够有效的实现肢体的基本运动,对于预防患者关节的变形与萎缩具有非常重要的作用。
上肢康复机器人研究进展综述
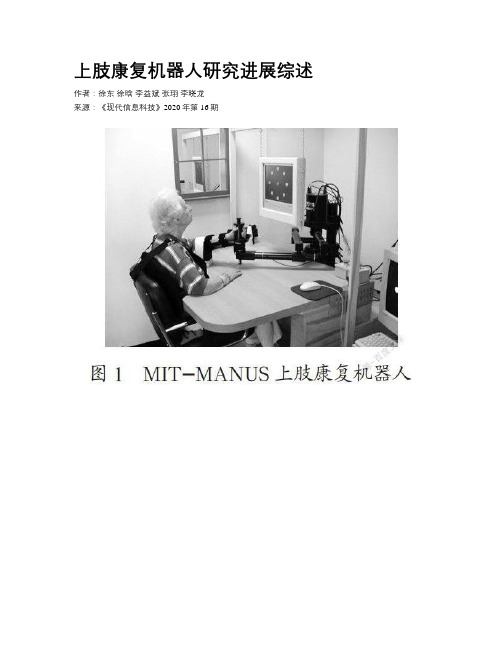
上肢康复机器人研究进展综述作者:徐东徐晗李益斌张珝李晓龙来源:《现代信息科技》2020年第16期摘要:康复机器人已成为上肢运动功能障碍患者进行康复治疗的重要方法之一。
文章通过回顾国内外近年来的研究进展和研究成果,结合康复训练需求,将上肢康复机器人按照使用方式的分类方法,分为末端引导式和外骨骼式两大类,并对其中具有代表性的研究成果从机器人的结构设计、控制设计、康复训练内容、传感检测等方面进行着重介绍,为上肢康复机器人的研究与设计提供参考依据。
关键词:上肢运动功能障碍;康复治疗;康复机器人;外骨骼中图分类号:TP242;R496 文献标识码:A 文章编号:2096-4706(2020)16-0142-04Review on Research Progress of Upper Limb Rehabilitation RobotXU Dong,XU Han,LI Yibin,ZHANG Xu,LI Xiaolong(Auckland Tongji Rehabilitation Medical Equipment Research Center,Tongji Zhejiang College,Jiaxing 314051,China)Abstract:Rehabilitation robot has become one of the important methods for rehabilitation treatment of patients with upper limb motor dysfunction. This paper reviews the research progress in recent years at home and abroad and the research results,combined with rehabilitation training needs,the upper limbs rehabilitation robot according to the way of using classification method,divided into two categories:terminal heuristic and exoskeleton,and some representative research results from the structure of the robot design,control design,the rehabilitation training content,sensing detection is introduced,the research and design of the robot for upper limb rehabilitation to provide the reference basis.Keywords:motor dysfunction of upper limbs;rehabilitation treatment;rehabilitationrobot;exoskeleton0 引言脑卒中是一种急性脑血管疾病,严重危害人类健康和生命安全,具有高发病率、高死亡率以及高致残率的特点[1]。
开题报告范文-《上肢康复训练机器人设计》

开题报告范文-《上肢康复训练机器人设计》一、研究背景随着人口老龄化问题日益突出,中风、意外伤害等疾病造成的上肢肌肉无力、肌肉萎缩和运动障碍等问题也越来越突出。
因此,上肢康复训练机器人设计成为目前研究的热点之一。
机器人技术的发展和应用,为上肢康复训练提供了有效的手段。
上肢康复训练机器人可以模仿人工操作,提供定量化的训练和数据,不仅可以加强患者的肌肉力量和协调能力,还可以提高康复效果。
目前,国内外关于上肢康复训练机器人的研究还处于起步阶段。
在这种背景下,本项目将开发一款性能稳定、使用方便、功能完善的上肢康复训练机器人,以提高患者的康复效果,缓解社会养老压力。
二、研究目的本项目的研究目的主要有以下几个方面:1.设计一款适用于上肢康复训练的机器人,能够提供量化和精准的训练,提高康复效果。
2.提高机器人的使用率和适用范围,帮助更多的患者进行康复训练。
3.开发一款性能稳定、使用方便、功能完善的机器人,以满足康复训练机器人市场的需求。
三、研究内容本项目的研究内容主要包括以下几个方面:1.上肢康复训练机器人的机械设计:根据上肢的运动特点和康复训练的要求,设计出适用于上肢康复训练的机器人,包括机械臂、夹具等部件。
2.上肢康复训练机器人的动力系统设计:确定机器人的动力来源和传动方式,选择适合机器人运行的驱动器,如直流电机、步进电机等。
3.上肢康复训练机器人的控制系统设计:设计机器人的控制系统和算法,使得机器人能够进行定位、运动控制和数据采集等功能。
4.上肢康复训练机器人的安全保护系统设计:设计机器人的安全保护系统,防止机器人在使用中造成患者伤害。
四、研究方法本项目的研究方法主要包括以下几个方面:1.机械设计:使用Solidworks等软件进行机械部件的3D建模和模拟,确定机械部件的尺寸和结构。
2.动力系统设计:根据机械设计的参数确定动力系统的选型,并进行功率计算和传动比分析。
3.控制系统设计:采用控制系统研究中常用的MATLAB和Simulink进行控制算法仿真,测试控制系统的可行性和性能。
上肢康复机器人的设计与控制研究

上肢康复机器人的设计与控制研究上肢康复机器人的设计与控制研究摘要:随着人口老龄化等问题的出现,康复机器人在恢复患者肢体功能上扮演越来越重要的角色。
上肢康复机器人设计与控制的研究对于提高患者的生活质量和康复效果具有重要意义。
本论文主要介绍了上肢康复机器人的设计与控制研究的现状和发展趋势,并针对上肢康复机器人的关键技术进行了分析和探讨。
关键词:上肢康复机器人、设计、控制、关键技术1. 引言上肢康复机器人作为一种辅助设备,可以帮助患者进行上肢功能的恢复训练。
尤其对于中风后肢体功能障碍的患者,上肢康复机器人可以有效地帮助其恢复手部的运动功能,提高生活质量。
因此,研究上肢康复机器人的设计与控制对于康复医学领域具有重要的意义。
2. 上肢康复机器人的设计2.1 机械结构设计上肢康复机器人的机械结构设计是整个系统的基础,应考虑到患者的运动范围和手臂的解剖结构。
常见的设计包括机械臂和手部抓取装置。
机械臂设计需要具备足够的自由度和承重能力,以适应不同运动轨迹和力量要求。
手部抓取装置需要能够模拟人手的运动,并具有足够的灵活性和抓取力度。
2.2 传感器设计上肢康复机器人的传感器设计用于获取患者的运动状态和力量信息,以实现对机器人的精确控制。
常见的传感器包括惯性传感器、力传感器和表面电极。
惯性传感器可以用于监测患者的运动姿势和速度,力传感器可以测量机器人和患者之间的力量交互,表面电极可以用于监测患者的肌电信号。
3. 上肢康复机器人的控制3.1 控制策略上肢康复机器人的控制策略需要具备良好的实时性和灵活性,以适应患者的不同康复需求。
常见的控制策略包括PID控制、自适应控制和模糊控制。
PID控制可以实现机器人的位置和力量控制,自适应控制可以根据患者的运动状态调整控制参数,模糊控制可以处理非线性和模糊的控制问题。
3.2 运动规划上肢康复机器人的运动规划是指根据患者的运动轨迹生成机器人的运动路径,以实现恢复训练。
常见的运动规划算法包括逆向运动学和遗传算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
患者进 行 康复训 练 ,所 以 ,其 部 分 结 构 尺 寸 应 可调 节 , 如前臂 长 度 、上 臂长 度 ,以满 足不 同患 者肢 体尺 寸 的差
异 。此 外 ,外骨 骼机 器人 穿戴 于患 者上 肢 ,其 结 构应 力 求 轻便 ,应 具有 既便 于穿戴 又 质轻 的特 点 。
(4)可适 应不 同 的康复 训 练 。康复 机 器人 应 能 实 现与 运动模 式 相对 应 的康 复运 动 ,既能 实 现 单 关 节 的
康 复机 器人 直接作 用 于人 体 ,不 同于 工业 机器 人 ,
其 在结 构设 计上 应充 分 考 虑 接 触 的 外 界环 境 ,因 此康 复 机器人 在 结构设 计 上应 满足 以下 要求 :
(1)安全 性 。机器 人直 接与人 体接触 ,不恰 当 的设 计会使机 械臂 与 用 户产 生 干涉 ,引起 患 肢 二次 损 伤 ,因 此 ,安全性问题 是进行康复机器人设计的首要考虑 因素 。
文 献 标 识 码 :A
0 弓I言 脑卒 中 ,俗 称 中风 ,是 由血液 流进 大脑 时 中断 引起
的 ,损 害大 脑 细胞 而且 后 果 通 常 比较 严 重 。对 于 偏 瘫 患者 ,基 于脑 可塑性 原 理 的 运 动治 疗 是 当前 应 用 最 为
普 遍 的康 复 治疗 方 法n]。 目前 ,大 多数 的运 动 疗 法 都 是 由理疗 师或 者患 者 亲属按 照理 疗手 册带 动患 肢进 行 运动 训练 ,这使 得理 疗 师和 亲属 陷入 繁琐 的劳 动 中 ,并 且 患 者 只是被 动地 接 受 运 动训 练 ,在运 动 训 练 中不 能 给予 患者合 适 的辅 助 力 ,无 法 充分 发挥 患者 的主 动 作 用 ,这样在 很 大程 度 上 减小 了康 复 训 练 的 效 果 。作 为 新兴 的研 究领 域 ,康 复 机 器 人 可 以 代 替理 疗 师 为 患 者 提供 无 时间 限制 的康 复治疗 。我 们还 可 以结合 现代 的 柔性 控制 技 术 ,考 虑用 户与 机器 人 的交互 作用 ,研制 一 种交 互式 控 制策 略 ,根 据 患 者 的 康 复 水平 提 供 适 宜 的 康 复训 练 ,充 分 发 挥 患 者 的 主 观 力 量 ,提 高 康 复 效 果 [2]。本 文 以人体 上 肢 的生 理结 构 为依 据 ,设 计 了一 个 5自由度 的上肢 康 复 机器 人 ,并 通 过 ADAMS软 件 进 行运 动学 仿真 ,验证 了结 构 的可行 性 。 1 上肢 康 复机器 人 总体 结构设 计 1.1 上 肢 康 复 机 器 人 结 构 设 计 要 求
蔡 国庆 ,程 秀芳
(华 北 理 工 大 学 机 械 工 程 学 院 , 河 北 唐 山 063009)
摘 要 : 以人 体 上肢 的 生 理 结 构 为 依 据 ,设 计 了 一个 5 自由度 的上 肢 康 复机 器 人 , 实 现 肩 关 节 内收 外 展 、 前 屈 后伸 及 内旋 外 旋 , 肘 关 节 前 屈 后 伸 ,前 臂 旋 前 旋 后 的运 动 。 同 时 引 入 一 个 被 动 自 由度 从 而 保 证 机 器 人 与 用 户
运动 ,又可 完成 多关 节 复合运 动 。
1.2 自由 度 的 选 择
根据 上肢解 剖 学 的分 析 ,上肢 共有 9个 自由度 ,其 中肩关 节 有 5个 自由度 ,肘关 节有 1个 自由度 ,腕关 节 有 3个 自由度 。
肩 部 的 3个 旋 转 自 由度 的运 动是 肩 部 的 主要 运 动 ,通 过 三个维 度 的旋 转 几 乎 可 使 上肢 实 现 整 个 半 球
前 屈 后 伸
——45~ 180 ——45Leabharlann 90 肩 内 收 外 展
一45~ 180
——40~90
内旋 外 旋
一9O~ 60
—5O~6O
肘 前 屈 后 伸
O~ 135
0~ l35
腕 旋 前 旋 后
根据 人体 解剖 学 ,将 与 本 研 究 有关 的人 体 极 限运 动范 围和机 构 实 现 的 运 动 范 围 列 入 表 1。其 中 ,上 肢 自然 下垂 为各 个关 节 的 中立 位 置啪 。
表 1 关 节 运 动 范 围
关 节 自由 度 极 限 运 动 范 围 (。) 机 构 实 现 的运 动 范 围 ( )
(2)运动 可实 现性 。设计 的机械 结 构 其运 动 范 围 应 在正 常人 的活 动空 间之 内 ,不 允 许 有 超 越人 体 极 限 现 象 。而且 在设 计 时 ,尽 可 能地 使 上 臂 实 现 多个 自由 度 的 空间运 动 ,充分 锻炼 患者 的上 肢关 节 。
(3)可调 节性 与简 便性 。康 复机 器 人 帮 助不 同 的
关 节 的对 齐 , 增加 了运 动 范 围。 按 照 人 体 尺 寸 标 准 , 采 用 Creo绘 制 了机 械 臂 的 三 维 模 型 , 并 通 过 ADAMS
软 件 进 行 运 动 学 仿 真 , 验 证 了结 构 的可 行 性 。
关键词 :上肢康 复机械 人;5自由度;安全 限位
中 图分 类 号 :TP242.6
第 5期 (总 第 204期 ) 2017年 1O 月
机 械 工 程 与 自 动 化 M ECHANICAL ENGINEERING 8L AUT0M AT10N
文 章编 号 :1672—6413(2017)05—0042—03
N o.5 0 ct.
上肢 康 复 机 器 人 的研 究
形空 间 的运动 ,因此 肩 部 的 3个旋 转 自由度 是 必要 的 。 而肩 部 的 2个 移动 自由度 的运 动 范 围非 常 小 ,不 予 考
虑 。肘 关 节连 接上 臂 和前 臂 ,在 设 计 中必 不 可 少 。考 虑到 结构 的简便 性 ,腕部 只考 虑旋 前旋 后 自由度 。