双轮驱动差速控制试验平台设计及仿真
TDS500列车轮对驱动状态仿真试验台
TDS-500列车轮对驱动状态仿真试验台
TeachingEquipment
1)试验台功能介绍
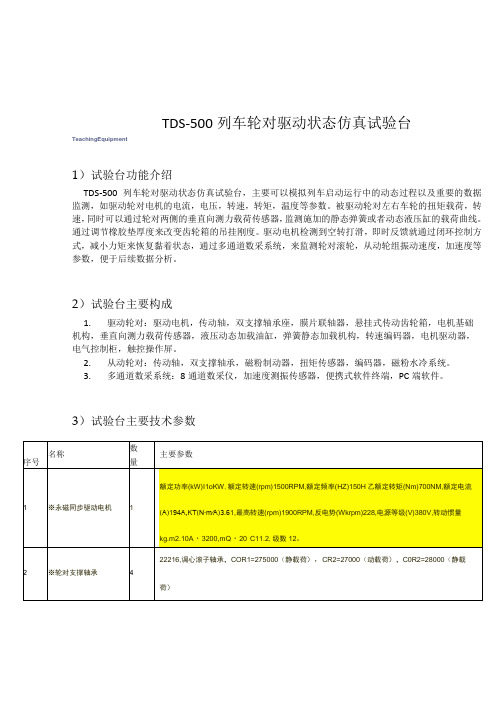
TDS-500列车轮对驱动状态仿真试验台,主要可以模拟列车启动运行中的动态过程以及重要的数据监测,如驱动轮对电机的电流,电压,转速,转矩,温度等参数。
被驱动轮对左右车轮的扭矩载荷,转速,同时可以通过轮对两侧的垂直向测力载荷传感器,监测施加的静态弹簧或者动态液压缸的载荷曲线。
通过调节橡胶垫厚度来改变齿轮箱的吊挂刚度。
驱动电机检测到空转打滑,即时反馈就通过闭环控制方式,减小力矩来恢复黏着状态,通过多通道数采系统,来监测轮对滚轮,从动轮组振动速度,加速度等参数,便于后续数据分析。
2)试验台主要构成
1.驱动轮对:驱动电机,传动轴,双支撑轴承座,膜片联轴器,悬挂式传动齿轮箱,电机基础
机构,垂直向测力载荷传感器,液压动态加载油缸,弹簧静态加载机构,转速编码器,电机驱动器,
电气控制柜,触控操作屏。
2.从动轮对:传动轴,双支撑轴承,磁粉制动器,扭矩传感器,编码器,磁粉水冷系统。
3.多通道数采系统:8通道数采仪,加速度测振传感器,便携式软件终端,PC端软件。
3)试验台主要技术参数。
平行双轮电动车的建模与控制仿真
( 6) ( 7)
图 3 系统模型
Ewk2 = 2 ×
v2 1 ω rm Jw 2 w = Jw 2 R2
式中 , M 为车轮的质量 ; J w 为车轮的转动惯量 ; R 为车轮
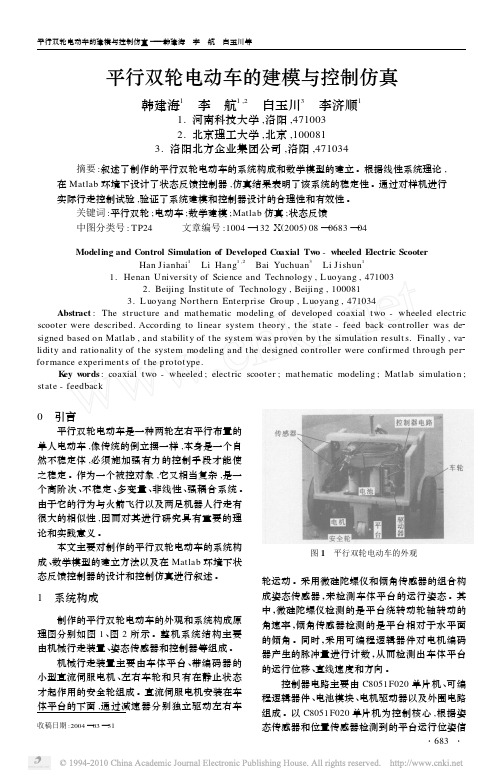
由图 3 可以看出 , 该系统具有 3 个自由度 :绕 Y 轴的俯仰运动 , 俯仰角θ p 和俯仰角速度ω p ;沿 X 轴的直线运动 , 位移 x rm 和移动速度 vrm ; 绕 Z 轴的 ω β。 摆动运动 , 摆动角β 以上 6 个状 z 和摆动角速度 态变量完全描述了该三自由度系统的动态特性 。 另外 , 作用在电动车质量中心的干扰角度θ d 表示 了电动车质量中心位置变化引起的外部干扰 。 对 θ 于实际尺寸的电动车 , d 由站立在平台上驾驶者 身体重心的变化而引起 。 系统的平衡靠电机施加 在左右轮轴上的驱动力矩 TL 和 T R 来控制 。 ・684 ・
对式 ( 1) 和式 ( 2) 分别微分 , 可得车体平台的 平动动能
Eck1 =
・ 1 ・ 1 (・ 2 2 2 ) = mx p = m xpm + z pm 2 2
( 3)
1 ( 2 2 θ m vrm + l2ω p ) + mv rm lco s pω p 2
式中 , xp 为 车 体 平 台 的 平 动 位 移 ; m 为 车 体 平 台 的 总 质量 。
Model ing and Control Simulation of Developed Coaxial Two - wheeled Electric Scooter Han J ianhai1 Li Hang1 ,2 Bai Yuchuan3 Li J ishun1 1. Henan U niver sit y of Science and Technology , L uoyang , 471003 2. Beijing Instit ute of Technology , Beijing , 100081 3. L uoyang Nort hern Enterp rise Gro up , L uoyang , 471034 Abstract : The st ruct ure and mat hematic modeling of developed coaxial two - wheeled elect ric scooter were described. According to linear system t heory , t he state - feed back co nt roller was de2 signed based o n Matlab , and stabilit y of t he system was p roven by t he simulatio n result s. Finally , va2 lidit y and ratio nalit y of t he system modeling and t he designed co nt roller were co nfirmed t hro ugh per2 formance experiment s of t he p rotot ype. Key words : coaxial two - wheeled ; elect ric scooter ; mat hematic modeling ; Matlab simulatio n ; state - feedback
轮毂式电动车电子差速系统的动力学仿真

轮毂式电动车电子差速系统的动力学仿真田韶鹏;范玲【摘要】以双后轮驱动的电动汽车为研究对象,针对轮毂电机驱动的电动汽车,建立了汽车直线行驶和转向行驶的二自由度电动汽车模型,利用Matlab/Simulink软件对其进行了仿真分析.仿真结果表明,每个驱动轮的附着系数较高,车辆能获得更大加速度或减速度.%Rear wheels driving EV was studied. The in - wheel motor driven EV in forward and two - degree - of - freedom steering operation was modeled. The Matlab/Simulink software was applied to the model and the simulation analysis. The simulation resuits show that the attachment coefficient of every wheel is relatively high,so the vehicle could obtain high acceleration or retarded velocity.【期刊名称】《武汉理工大学学报(信息与管理工程版)》【年(卷),期】2011(033)003【总页数】3页(P404-406)【关键词】电子差速;电动车;滑移率;二自由度【作者】田韶鹏;范玲【作者单位】武汉理工大学,汽车工程学院,湖北武汉,430070;现代汽车零部件技术湖北省重点实验室,湖北武汉,430070【正文语种】中文【中图分类】U469.72电子差速系统(electronic differential system,EDS)完全采用电控方式控制各个车轮的转速,使车轮以不同速度转动[1]。
为了提高电动车运行的速度和效率,同时基于能量传递效率和车体空间限制等考虑,近年来采用无刷直流轮毂电机四轮独立驱动式电动车已成为研究热点[2-3]。
电动轮汽车差速控制策略及仿真
电动轮汽车差速控制策略及仿真
徐凌
【期刊名称】《汽车工程师》
【年(卷),期】2016(000)007
【摘要】电动轮驱动的汽车各车轮运动状态相互独立,存在差速问题.为了解决电动轮驱动汽车的差速问题,使各轮速度相协调,进行了电动轮汽车差速控制策略及仿真研究.利用仿真平台对电动轮驱动汽车的车体横摆、路面不平及车轮半径不同的工况进行了仿真分析.结果表明:对驱动电机按转矩指令进行控制,采用转速随动的控制策略,可实现电动轮驱动汽车在各种工况下的自适应差速,避免出现车轮拖滑或滑转的情况.
【总页数】5页(P21-24,54)
【作者】徐凌
【作者单位】中国第一汽车股份有限公司天津技术开发分公司
【正文语种】中文
【相关文献】
1.电动客车电子差速控制策略仿真分析 [J], 李二平;熊金峰;胡廷辉;刘鑫;杜卫彬
2.电动轮汽车差速控制策略及仿真 [J], 徐凌;
3.轮边驱动自适应转矩平衡电子差速控制策略仿真实验研究 [J], 张霄霆;张炳义
4.轮边驱动自适应转矩平衡电子差速控制策略仿真实验研究 [J], 张霄霆;张炳义;
5.六轮铰接式电动轮自卸车差速控制策略及仿真 [J], 姜立标;丘华川;凌诗韵;何家寿
因版权原因,仅展示原文概要,查看原文内容请购买。
轮毂驱动电动汽车差速转向系统仿真分析
轮毂驱动电动汽车差速转向系统仿真分析
赵琦;时培成;徐增伟
【期刊名称】《鸡西大学学报》
【年(卷),期】2017(017)012
【摘要】为了研究轮毂驱动电动汽车的差速转向系统,基于Acherman-Jeantand 转向模型建立了差速转向解析表达式与仿真模型;给出了电机模型并依据其运动学方程设计了等效滑模速度控制器;搭建出包含差速转向模型、等效滑模控制器、电机模型在内的差速转向控制系统.结合实际工况,在MATLAB/Simulink环境中进行轮毂驱动电动汽车差速转向控制系统的仿真试验并与传统PI控制系统进行仿真对比.仿真试验结果表明:文中所建模型是正确的,控制系统是可行的;体现了等效滑模控制对差速转向系统控制响应时间短、超调量小、鲁棒性强等优势.
【总页数】7页(P34-40)
【作者】赵琦;时培成;徐增伟
【作者单位】安徽工程大学机械与汽车工程学院,安徽芜湖 241000;安徽工程大学机械与汽车工程学院,安徽芜湖 241000;安徽工程大学机械与汽车工程学院,安徽芜湖 241000
【正文语种】中文
【中图分类】U463.4;U469.72
【相关文献】
1.基于再生制动的四轮毂电机独立驱动电动汽车差速转向控制研究 [J], 董铸荣;贺萍;梁松峰;邱浩
2.轮毂电机独立驱动电动汽车差速转向路感控制研究 [J], 赵万忠;王春燕;张宗强;于蕾艳;赵婷
3.基于Ackermann模型的轮毂电机四轮独立驱动电动汽车电子差速转向控制研究[J], 董铸荣;贺萍;朱小春
4.轮毂驱动电动汽车差速转向系统仿真分析 [J], 赵琦;时培成;徐增伟;
5.轮毂电机驱动纯电动汽车多功能转向系统仿真研究 [J], 王亚楠;严世榕;吕兵兵;杨建翠
因版权原因,仅展示原文概要,查看原文内容请购买。
桥式起重机大车两个驱动电动机同步仿真
(2)统一安排、集中送检(申请检
的作用。主要表现在:
(1)大部分企业没有设置专门的计 量管理机构.没有明确的规章制度,没 有周期检定计划等; (2)检测仪器设备陈旧落后,合格
率较低;
(3)计量管理人员及检测人员素质 参差不齐,普遍较低: (4)实验室环境条件难以满足实验 设备所需环境的要求等。 究其原因.主要是由于管理者计量 的法律意识淡泊;科学管理意识较差; 管理水平较低.既不能保证检测数据的
有的作用。 (5)合理设置计量检测管理机构 加强对计量检测的领导,明确分 工.健全责任制。专(兼)职计量人员的
乡镇企业计量现状及改进
(接上页)案示意图如图3所示:
首先是企业的管理者要以强化计
量、质量、标准化等法律知识、质量意
识、全面质量管理等内容为主的培训, 树立质量管理意识,提高计量法制意识 和科学的计量管理意识。二是对计量管
1强化人员培训首先是企业的管?者要以强化计?质?标准化等法?知识质?意识全面质?管?等内容为主的培训树立质?管?意识提高计?法制意识和科学的计?管?意识
B
技术论文
rand
桥式起重机大车两个驱动 电动机同步仿真
口张岩董德波
桥式起重机一般由大车、小车和吊钩组成。其大车
大多采用双侧同时驱动,以保证大车在运动过程中的同 步。对于精度要求低的起重机一般直接安装两台异步电
一种ABS制动性能测试在环仿真双轮试验台及试验方法[发明专利]
![一种ABS制动性能测试在环仿真双轮试验台及试验方法[发明专利]](https://img.taocdn.com/s3/m/b0119830d15abe23492f4d7c.png)
专利名称:一种ABS制动性能测试在环仿真双轮试验台及试验方法
专利类型:发明专利
发明人:卢荡,马尧,尹珩沣,杨昌耿
申请号:CN202010919444.0
申请日:20200904
公开号:CN111912630A
公开日:
20201110
专利内容由知识产权出版社提供
摘要:本发明公开了一种ABS制动性能测试在环仿真双轮试验台及试验方法,其中,驱动与惯量模拟系统模拟车辆行驶惯量输出至综合性能测试系统;综合性能测试系统通过在滚筒的转动方向前后设置车辆前后轴各一侧车轮,控制车轮与滚筒之间的压力模拟车辆的垂向力,车轮配有制动器及检测车轮状态的传感器;电控系统HIL测试平台上设置主缸踏板作动装置、分别与车辆前后轴另一侧车轮对应的制动器和制动轮缸压力传感器和轮速模拟机构,主缸踏板作动装置与待测ABS相连后分别与四个制动器相连,实现待测ABS仿真制动控制;精准水膜控制系统在滚筒与车轮之间喷水模拟湿滑路面工况。
本发明能够真实模拟制动工况及车辆触发ABS制动时轮胎的制动状态。
申请人:吉林大学,柳州中动智轮科技有限公司
地址:130012 吉林省长春市长春高新技术产业开发区前进大街2699号
国籍:CN
代理机构:长春吉大专利代理有限责任公司
代理人:刘程程
更多信息请下载全文后查看。
《基于双轮自平衡小车的PID参数验证平台的设计》范文

《基于双轮自平衡小车的PID参数验证平台的设计》篇一一、引言随着智能控制技术的快速发展,双轮自平衡小车作为一种典型的动态系统,被广泛应用于智能交通、服务机器人和智能家居等领域。
PID(比例-积分-微分)控制算法作为最常用的控制策略之一,在双轮自平衡小车的控制中起着至关重要的作用。
本文旨在设计一个基于双轮自平衡小车的PID参数验证平台,为优化PID参数提供有效的工具和手段。
二、设计目标本设计的核心目标是构建一个功能完善、操作简便的PID参数验证平台,以实现对双轮自平衡小车PID控制参数的精确验证和优化。
该平台应具备以下特点:1. 高度集成化:整合硬件设备和软件算法,实现一体化设计。
2. 实时性:能够实时监测和调整小车的运行状态,为PID参数的调整提供实时反馈。
3. 便捷性:操作界面友好,便于用户进行参数设置和调整。
4. 通用性:适用于不同型号和规格的双轮自平衡小车。
三、平台架构设计本平台主要由硬件设备和软件算法两部分组成。
(一)硬件设备硬件设备包括双轮自平衡小车、传感器、控制器、电源等。
其中,双轮自平衡小车采用典型的两轮驱动结构,通过电机驱动实现平衡和移动;传感器用于实时监测小车的状态信息,如角度、速度等;控制器负责接收传感器数据,根据PID算法计算出控制指令,驱动电机实现小车的平衡和移动;电源为整个系统提供稳定的电力供应。
(二)软件算法软件算法主要包括PID控制算法、数据采集与处理、用户界面等部分。
PID控制算法是本平台的核心,负责根据小车的状态信息计算出控制指令;数据采集与处理负责实时采集传感器数据,并进行预处理和存储;用户界面提供友好的操作界面,便于用户进行参数设置和调整。
四、PID参数验证流程设计本平台通过以下步骤进行PID参数的验证和优化:1. 初始化:设置初始的PID参数,启动小车和平台。
2. 数据采集:通过传感器实时采集小车的状态信息,如角度、速度等。
3. PID计算:根据采集的数据和设定的PID参数,计算出控制指令。
基于双轮差速机器人的轮式里程计设计与实现
:信息:技术与应甬)信息记录材料2019年11月第20卷第11期____________________________________________基于双轮差速机器人的轮式里程计设计与实现徐麟峰I,郭旭强2(1西安交通大学陕西西安710049)(2中国科学院空天信息研究院北京100094)【摘要】使用双轮差速机器人作为基础,进行无人驾驶控制的深入研究。
其中对于里程计的设计和实现,是通过航位推算对机器人位置的确定,与为双轮机器人的运动学模型相结合,配合PID控制调速将差速使用于推算过程加以实现的。
达到提升轮式机器人的航位里程的推算准确性的效果,并通过自主设计的双轮机器人为平台加以设计调整,功能实现,并达到预期效果.【关键词】航位推算;PID控制;里程计;双轮差速机器人【中图分类号】TP24【文献标识码】A【文章编号】1009-5624(2019)11-0086-021引言近年来,互联网技术的迅速发展以及5G时代的到来,汽车工业迎来了革命性变化。
汽车智能化技术正逐步得到广泛应用,其中最典型也是最热门的未来应用就是无人驾驶汽车。
在无人驾驶覆盖的众多技术之中,车辆定位技术是无人驾驶汽车行驶的基础。
在当前时刻位置确定的条件下,利用传感器测量车辆航向和里程,从而推算车辆位置的方法,也就是所谓的航位推算。
通过对双轮差速机器人作为平台研发,改进现有的里程计存在的精确度问题,减小由于累加效应导致的航位推算误差问题的影响,结合运动学模型和机器人的结构加以完善。
2基础设计2.1机械结构在机械结构设计的过程中,要进行全方面的考虑。
重力分配均匀,保证重心稳定。
安装位置互相不干涉,且美观对称。
可根据功能加减单元,安装和拆卸方便。
通过分析和设计,釆用双层结构。
底盘放置电机、电源、Arduino、Raspberry、GPS模块、电机驱动板等。
顶层放置GPS天线和激光雷达。
机器人运动方式为差动式即采用三轮结构,后两轮为驱动轮,通过后两轮的转速差来实现机器人转弯。
基于NI myRIO的双轮自平衡平台设计
基于NI myRIO的双轮自平衡平台设计李立; 李宏杰【期刊名称】《《自动化仪表》》【年(卷),期】2019(040)011【总页数】4页(P45-48)【关键词】双轮自平衡; LabVIEW; NI myRIO; 远程控制; PID算法【作者】李立; 李宏杰【作者单位】安阳工学院电子信息与电气工程学院河南安阳455000【正文语种】中文【中图分类】TH18770 引言伴随当今智能工厂和智能制造的发展,物联网(internet of things,IoT)技术、人工智能(artificial intelligence,AI)技术减少了人力使用和降低了失误率,方便了人们的生活。
2004年,中国台湾国立中央大学的研究人员搭建了两轮自平衡两轮电动车实物模型。
2008年,我国自主研发的受控双轮Chegway平衡车。
2016年,德国Transporter公司研发了一款可以用于摄影的双轮平衡车[1-3]。
其平衡算法包括PID算法、模糊控制算法、SMC算法、神经网络算法等;控制芯片多为单片机、ARM等[4-7]。
单片机、ARM等存在运算速度、存储能力和控制功能的限制,难以满足复杂地形和状况的平衡策略。
基于此,本文提出了基于NI myRIO的双轮平衡系统。
采用的NI myRIO控制器包含现场可编程门阵列(field programmable gatearray,FPGA)编程能力,采用LabVIEW图形化编程语言,并且支持多系统操作,具有较好的可扩展性和可维护性,为双轮平衡系统发展提供另一种方案。
本系统质量为906 g,质点到轴距离为0.35 m,车轮摩擦系数为0.05,自平衡角为0.15 rad。
二级倒立摆模型的基本工作原理是使用陀螺仪传感器采集到的角度信息,结合PID平衡算法驱动电机进行动态自平衡或者受控运动。
本文从系统组成、控制系统的硬件设计和控制系统的软件设计、在PC机、iPad终端的交互界面四个方面展开介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
din
d
dout
R fin
Rfout
dout
d
Rf
e
K
CG
e
lf
dБайду номын сангаасn
lr
R rin
Tr
r
R
Rrout
图 2-1
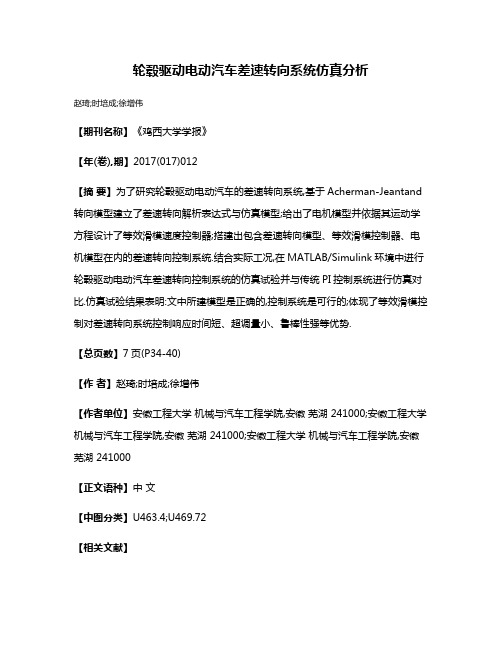
汽车转向几何关系示意图
由图2-1,根据其几何关系推导,可有如下关系:
Rfin
lf lr e sin fin
Rfout
lf l r e sin fout
Rrin Rfin
关键词:电子差速器;89C51;Proteus 仿真 1 引言 当车辆行驶在转弯路面或弯道时, 为了达到转向的目的, 车辆转向时内外轮应当具有一 定的速度差,即差速。 电子差速转向控制是双轮电动机驱动汽车的关键技术之一。 电动轮驱动汽车轮心通过悬 架与车体相连, 车轮轮心的水平速度与车体该处的水平速度相等, 但由于悬架的上、 下运动, 还会引起轮心产生垂向速度, 这两个速度分量的合成即为实际轮心速度, 由此可见在转向时, 各轮轮心速度是不相等的,为此也要求各轮转速也不相同,并与相应轮心速度相协调[1]。对 电动轮驱动的电动汽车,各车轮之间没有机械连接,运动状态相互独立,那么电动车各车轮 在汽车转向时同样要满足车轮旋转线速度与该车轮的轮心速度相协调的关系。 只有满足这一 前提,才能说解决了电动轮汽车的差速问题[2]。 2 双轮驱动电动汽车差速控制试验平台 2.1 试验平台结构 差速控制系统试验平台由模拟驾驶台、差速控制器、左右轮电机驱动单元、左右轮牵引 电机等部分组成。 其中模拟驾驶平台由 Labview 软件搭建构成, 主要完成电动汽车车速与转 角的数值给定, 并将其传递给下位机单片机, 输入信号是由 Labview 驾驶员界面车轮转速和 转角信号, Labview 将车轮转速和转角变为 2 进制码通过 RS232 传递给下位单片机; 差速控 制器主要由 MCS-51 系列单片机 AT89C51 以及外围电路构成,主要完成左右轮电机速度的 计算。将 Ackermann 差速模型通过 Keil u Vision4 软件写入 AT89C51 单片机中,单片机将上 位机发来的转速和转角信号通过计算最终转换成数字信号传递给左右电机控制单元。 同时通 过编写其他控制程序可以实现控制变频器的启停, 及紧急制动。 另外通过矩阵键盘可以向差 速器输入车速以及转角信号, 以实现不使用上位机便可对左右轮速进行直接的控制, 输入信 号是由上位机发来的当前车轮转速和转角的数字信号, 输出信号是单片机通过计算出的左右 轮速的数字信号; 左右轮电机驱动单元是由 D/A0832 转换电路和西门子 6se70 变频器以及外 围电路构成, 主要完成左右轮电机的电源信号给定, D/A0832 将单片机送出的左右轮速的数
参考文献 [1] 丁惜瀛,张钦爽,覃艳丽,苑克臣.基于转矩分配的电动汽车横摆稳定性控制[J].功率变流技术 2011(05) pp.5. [2] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2007. [3] 赵艳娥, 张建武. 轮毂电机驱动电动汽车电子差速系统研究[J]. 系统仿真学报, 2008, 12(2): 4769-4770. [4] 罗少文.我国新能源汽车产业发展战略研究[D].上海:复旦大学,2008. [5] 陈小辉.陕西省新能源领域发展技术路线研究[D].陕西:西安理工大学,2010.
1
字信号转换成 0~10V 的模拟电压信号送给 6se70 变频器,变频器通过预先设置好的功能将 0~10V 的电压信号转换成左右轮驱动电机的驱动信号;左右牵引电机由三相异步电机构成, 完成速度输出的快速响应,能够及时准确的驱动车轮,使汽车顺利转弯,异步电机直接与变 频器相连,变频器将驱动信号传递给异步电机,异步电机快速响应,及时准确的将转速传递 给车轮[3]。 2.2 差速模型 图 2-1 为汽车转向的几何关系示意图。汽车转向时,以整车质心速度为参考,计算每个 车轮绕转向中心的线速度, 进而得出每个车轮需要的电机转速, 通过向电机控制器发出电压 指令实现电机转速调节,而调整车轮转速,合理的分配每个电机的输出转速,实现车轮的纯 滚动转向行驶。 设左转向时方向盘转角为正,右转向时方向盘转角为负,在车辆低速转向行驶时,电子 差速器可依据 Ackermann 转角的几何关系进行设计。
图 3-2 轮速给定信号输出程序仿真结果
3
为了验证试验平台差速计算的准确性, 对不同的方向盘转角与汽车速度的输入下进行了 仿真,其结果如表 3-1 所示
表 3-1 不同的给定计算出的对应的轮速 方向盘转角 汽车速度 汽车转矩 内轮转速 (计算) 4 6 10 20 25 15 200 210 310 19 23 13 内轮转速 (仿真) 19 23 13 外轮转速 (计算) 21 27 17 外轮转速 (仿真) 21 27 17
2
即, vin v 1 tan fin
Tf Tf ,同理, vout v 1 tan fout 2l 2l
。
因此,汽车转向时,以整车质心速度为参考,计算每个车轮绕转向中心的线速度,进而 得出每个车轮需要的电机转速, 通过向电机控制器发出电压指令实现电机转速调节, 而调整 车轮转速,合理的分配每个电机的输出转速,实现车轮的纯滚动转向行驶[4-5]。 3 差速器设计 差速器实现的功能是接收上位机传来的车速及方向盘转角信号,通过 89C51 中 Ackerman 差速模型计算出左右驱动电机的转速算,最后通过 DAC0832 芯片进行数模转换, 转换为电压信号传到 6se70 型变频器中,从而控制电机转速。其总体结构如图 3-1 所示。
Tf 2
Rrout Rfout
Tf 2
(2-1) 由内外车轮转向角可计算出内外车轮轮速,根据Ackerman转角关系计算法: v为给定车速, l lf lr 。 tan fin
l ,又有 Rin
(2-2) (2-3)
T 2 Rin T f 2πRin πT f l Tf 1 f 2l Rin 2l 2 Rin 2 Rin 2πRin vin Cin 2 πRin πT f v C 2πRin in 为内轮转角, out 为外轮转角,一般可近似认为 fin fout f 1 tan fin Tf 1
由表 3-1 可以得出,通过模型计算出来的内、外轮转速与仿真所得到的数据进行比较, 在误差允许范围内,差速系统试验平台是可行的。 5 结论 实现了电动汽车电子差速系统试验平台设计,硬件上采用 89C51 单片机作为控制系统 核心、以 6SE70 变频器为驱动系统核心、配合运算放大电路、D/A 转换输出电路、单片机 与 PC 机串口通讯电路,以及各种保护电路。软件上采用单片机汇编语言程序,由差速控制 程序、串口通讯程序、速度给定输出程序以及 Labview 的车速方向盘转角的给定界面。最后 利用 Proteus 对差速器进行仿真,验证了差速系统试验平台的可行性。
双轮驱动差速控制试验平台设计及仿真
王 涛,丁惜瀛,张 擎,王亚楠
(沈阳工业大学电气工程学院 辽宁 沈阳 110870)
摘要:本文以双轮驱动电动汽车为对象,推导了电动汽车双轮驱动差速模型,设计了双轮驱动差速控制 试验平台, 采用 89C51 单片机作为差速控制器的主控芯片,以 PC 机作为驾驶平台,采用 RS232 作为驾驶平台 与差速器通讯接口,并利用 Protues 软件对差速控制系统的硬件及软件进行了验证与仿真,仿真结果验证了 试验平台的有效性。
作者简介:王涛,男,沈阳工业大学电气工程学院,辽宁沈阳 ,邮编 110870 ,电话 15040249387,邮
箱 wtsnail@
基金支持: 沈阳市科学技术项目(F12-277-1-11)
4
图 3-1 硬件总体结构图
差速器主要由 4 部分构成:上位机信号输入电路,完成 PC 与 89C51 的通讯接口;差速 计算部分,由 89C51 与其外围电路构成;速度信号输出电路,完成数模转换的功能,由 DAC0832 芯片实现;用于扩展功能的矩阵键盘及用于报警电路的灯泡及蜂鸣器。 4 仿真分析 差速模型中,L=2.4m,在给定的汽车速度为 20m/s,转角为 8 度,转矩 197N·m 时,x32 单元存放的是计算后的外轮转速为 22,0x33 中存放的是计算后的内轮转速为 18,仿真结果 如图 3-2 所示。可见本次仿真的结果是成功的。