产品结构设计大作业及其附图
机械手设计已整理

机械手设计摘要本文简要地介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和座标型式,气动技术的特点,PLC控制的特点及国内外的发展状况。
本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,分别设计了机械手的夹持式手部结构以及吸附式手部结构;设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩;设计了机械手的手臂结构,设计了手臂伸缩、升降用液压缓冲器和手臂回转用液压缓冲器。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:工业机器人;机械手;气动;可编程序控制器(PLC);机械手设计第一章绪论1.1机械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
车身件夹具结构设计以及调试经典干货

g、焊钳的选用及3D 模拟是否满足焊接要求。
会签完成双方签署会签纪要,确定问题点整改完成时间。夹具厂家问题点 整改完成后需提交给ME进行确认,经确认问题点全部整改完成才可出2D 图,下料加工。
5、 夹具气路逻辑回路图设计 夹具每步动作都由一个按钮阀单独控制,先后顺序必须有逻辑互锁,防止 误动作。 同一打开动作的极限开关一般安装在有定位销的压头上,如有多个带有 定位销的压头必须每个上都有极限开关,SWING 机构的第二次动作的打开 必须每个气缸都有极限开关,手动进机构必须每个都有极限开关。
b、钣件在夹具上的上、下件方不方便或是否可行,是否需要钣件导向 、顶升器、有的机构是否需要手动进等;
c、夹具的作业性是否可行(人员的操作位置、操作盘的位置、夹具作 业高度、焊钳操作位置等);
d、上下工位的定位基准是否统一(定位销圆、菱性、定位面位置等) ;
四、夹具3D结构会签
e、夹具的气路动作设计是否满足要求;
冲压件资源及状态满足要求
准备 工作
水、电、气具备使用条件 C02、点焊机、焊钳等相关设备具备使用条件
车身检测表理论值核对下发
调试人员到位 初版工艺文件完成
六、夹具调试
2、第一轮调试(功能性调试)
➢夹具功能检查:夹具动作顺序,装件顺序是否合理;夹具与钣金干涉现象分析 及消除;主定位与辅定位的分布是否合理;
二、焊装式样书会签
2.4简易夹具3D设计
随着3D 软件使用的普及,现国内外很多较先进的汽车厂已经开始使用 3D 软件进行简易夹具设计,使方案设计更直观化,更早的发现结构设计可 能存在的问题。
三、夹具3D结构设计
3、 夹具3D结构设计
夹具仕样书方案会签完成后便可进行夹具3D 结构图的设计。
除草机的结构设计-机械毕业设计(含全套CAD图纸)
关键词:自走式;除草机;除草部分;行走部分;驾驶台;排障杆
Ⅰ
哈尔滨工程大学本科生毕业设计
Abstract
A self preceded trash breaker, a new forestry machine has been presented in this paper. According to forest road surface conditions, and working situations of clearing fostering trees, the self-propelled brush breaker was designed to adapt to any atrocious environment, such as rugged road surface, narrowness of road and so on. It was highly practicability and generalizing value. This self-propelled brush breaker is consist of walking port, cutting port,bridge and breaching of obstacles part and can saw brush in diameter range from 10mm to 80mm.The power of whole machine is supplied by two petrol motors, one is for running power,the other is for breaking brush power. Saw blade was under the machine,the control stick on driving stand control its height away from ground to adapt to the forest road surface condition. The bushes that are higher than the machine can be controlled by a pilot bar, which can make bushes fall along the pre-designed direction and get rid of obstacles. This structure of self-propelled brush breaker is simple, is easy to maintain, and is operated easily as well. The main parts of the self-propelled brush breaker have been compeered and tested in this paper, such as pulley, axes, bearing, bond,four link rods and so on, and the main parts have been introduced and explained systemically, and have lubrication ,maintenance and other matters n related in using.
某门式刚架(吊车)厂房结构图纸
伸缩臂叉装车总体结构毕业设计机械CAD图纸

伸缩臂叉装车总体结构设计摘要:伸缩臂叉装车已成为高空作业设备的重要门类,是广泛应用于建筑工地、工矿企业仓库和其他工地上起升、运输、堆放砖头、木材、钢材和其他物料的一种起重运输设备,随着经济建设的发展,对其需求越来越大,对其性能的要求也越来越高。
本文主要任务是完成对伸缩臂叉装车的总体计算、整体布局、臂架结构设计及其有限元分析。
本文主要内容:⑴介绍伸缩臂叉装车的用途、国内外伸缩臂叉装车发展状况的比较、及其发展前景。
同时对臂架的结构和工作原理做了简要介绍。
⑵完成对关键铰点的布置,作业高度、作业幅度的计算,及整机稳定性的校核计算。
并绘制出整机总体布局图。
⑶臂架的结构设计,臂架的强度、刚度和稳定性计算,并用ANSYS软件进行臂架有限元分析。
同时完成臂架系统装配图,一节臂、二节臂的装配图和相关零部件的工程图。
⑷设计过程采用Pro/E软件进行三维实体建模,并进行装配,最后应用其工程图模块转化为二维工程图。
本次设计的伸缩臂叉装车参考了JCB公司的JCB530型号伸缩臂叉装车的外形尺寸,并且严格按照《起重机金属结构》、《BS_EN_1459-1999》和《机械设计手册》等相关设计规范进行设计,其性能和质量满足相关要求。
关键词:伸缩臂叉装车;稳定性;臂架;有限元分析The Frame Structure Design of Telehandler Abstract:Telehandler is a kind of hoisting equipment which is widely used in building site、storage and other place to lift、transport、stack the tile 、wood 、steel products and other materiel . Along with the development of economic in our country, the requirement of crawler crane is larger and larger, and the request of the capability is higher and mission of this paper is to complete the frame structure design of telehandler、the design of boom structure and the finite analysis of boom.The primary contents in this paper can be concluded as follows:The use of the telehandler、the telehandler’s development comparison domestic with abroad、and the development trend of the telehandler are the same time,the paper introduces the structure of boom and how boom works, and gives the principle of how to choose the boom.The pivot points arrangment , the calculation of lift height and forward reach, and the calculation of the stability are integral layout drawing is provided.The structure design of the boom, the calculation of the strength and stability of the boom system are accomplished and the finite analys of boom is achieved by ANSYS software. While at the same time planar engineering drawing must be done, such as the assembling of the boom system, the boom one the boom two and the related parts.I use the Pro-E software to design the 3D entity, and make dummy assembly. And then, the 3D entity is transformed to the planar engineering drawing with the Pro/E planar engineering drawing module.In the design process, I refer to the JCB530 telehandler of JCB, and accord to the《Crane Metal Stuctrure》、《BS_EN_1459-1999》and the《Machine Design Handbook》strictly. Its capability and quality meet the requirement.Key Words:Telehandler;Stability;Boom;The Finite element analysis目录摘要:伸缩臂叉装车已成为高空作业设备的重要门类,是广泛应用于建筑工地、工矿企业仓库和其他工地上起升、运输、堆放砖头、木材、钢材和其他物料的一种起重运输设备,随着经济建设的发展,对其需求越来越大,对其性能的要求也越来越高。
产品结构设计大作业及其附图
产品结构设计大作业及其附图引言产品结构设计是产品开发过程中至关重要的一环。
它涉及了产品特性、功能和美感的结合,以及产品的可制造性和可维修性。
在本篇文档中,我们将介绍我们的产品结构设计大作业,并附上相应的示意图以帮助读者更好地理解我们的设计思路。
产品背景与需求这个大作业的背景是一个新型智能手环的设计和开发。
我们的目标是设计一个功能强大,外观时尚的智能手环,满足用户对于健康管理、生活便捷和时尚潮流的需求。
具体而言,我们需要实现以下功能:1.心率监测2.步数计数3.睡眠监测4.来电提醒5.短信提醒6.闹钟功能结构设计方案为了完善上述功能的实现,我们设计了以下产品结构方案:主体结构智能手环的主体采用了一个弧形设计,以配合人手腕的曲线,提高佩戴的舒适度。
主要材料为优质硅胶,具有柔软、耐磨损和防水性能。
主体采用模块化设计,包括显示屏、电池、传感器等模块,方便制造和维修。
电源与充电智能手环采用可充电电池供电,并具有低功耗特性,以延长续航时间。
电池的充电方式为磁性接触充电,用户只需将手环靠近充电座即可自动吸附充电。
传感器布局为了准确监测用户的心率、步数和睡眠情况,我们在智能手环中设置了多个传感器。
心率传感器位于手环背面,接触用户的皮肤以获取心率数据。
步数计数和睡眠监测传感器则位于手环内部,通过用户手腕的运动和姿态来获取相应的数据。
操作方式智能手环的操作方式设计简单易用。
我们在手环的侧面设置了一个触摸显示区域,用户可以通过轻触、滑动等手势来操作手环。
同时,手环还配备了一个物理按键,用于特定功能的快捷操作,如闹钟的设置。
连接与通信为了与用户的手机进行连接和数据传输,智能手环具有蓝牙模块。
用户只需在手机中下载相应的APP,并通过蓝牙与手环进行配对,即可实现数据同步和通知推送等功能。
结构示意图下面是我们设计的智能手环的结构示意图:graph LRA[主体结构] --> B(电池)A --> C(显示屏)A --> D(传感器)A --> E(操作按键和触摸显示区域)B --> F(磁性接触充电)D --> G(心率传感器)D --> H(步数计数和睡眠监测传感器)结论通过本次大作业,我们成功设计并呈现了一个功能强大,外观时尚的智能手环。
60t造船龙门起重机支腿结构设计

工作级别 : M5
3.1.2总图及结构图
3-1 60t龙门起重机总图
3-2 起重机结构图
3.2 主梁小车计算参数
主梁结构采用箱形双主梁结构形式,箱形桥架见简图
图3-3主梁结构形式
梁自重载荷 =1280×1.0 =1280KN材料:Q345
上小车自重:
下小车自重:
工作级别 : M5 运行速度: 39m/min
表4-2支腿平面的支腿内力计算
名称
计算剪图和内力图
支座反力V或轴力和弯矩M
A.由起升载荷 、自重载荷 、小车自重 引起的内力
刚
性
支
腿
刚
性
支
腿
柔
性
支
腿
名称
计算简图和内力图
支座反力V或轴力和弯矩M
柔
性
支
腿
B.
大车制动时产生的水平惯性力 引称
计算简图和内力图
支座反力V或轴力和弯矩M
柔
性
支
小车在跨中时:A+B+D
M =7917KN
V=500+959.6-158.3=1301.3KN
小车在支座时:A+C+D
M =7917KN
V=500+1766.3-158.3=2108KN
M =7917KN
V =2108KN
2.工况2:大车不动,小车满载运行至跨中或支座处制动,吊重下降制动,分向垂直大车轨道。
吊具自重载荷:0.5t
水平惯性载荷
小车制动时,产生的水平载荷: =226.2KN
大车制动时,产生的水平载荷: =62.4 KN
起重机偏斜运行时对龙门结构产生的附加载荷:
混凝土泵车支腿部分的设计(机械CAD图纸)
摘要随着现代科学技术的迅速发展,混凝土泵车在现代化生产过程中应用越来越广。
本文首先介绍了混凝土泵车的结构和特点,重点对混凝土泵车支腿各部分进行了设计;支腿机构通过水平液压缸和垂直液压缸实现各支腿的收缩动作,采用并联控制系统实现各支腿的同时动作,本文对支腿的液压原理进行了相关设计,并根据需要对一些液压元件进行了选择。
具体内容主要包括:支腿的选型与跨距的确定,支腿危险截面强度的校核。
整车稳定性的计算。
支腿液压部分的设计,液压元件的选用。
本设计的主要特点是:机构简单,节省投资,控制方便。
关键词:混凝土泵车;支腿;稳定性AbstractWith the rapid development of the modern science and technology. Concrete pump is widely used in the modernization production process. First this paper introduced concrete pump on the structure and features, focusing on designing of the parts of a concrete pump stabilizer. Stabilizer bodies move through the level hydraulic cylinders and vertical hydraulic cylinder to achieve the contraction action, a parallel control system is used to control the movement of stabilizer. The hydraulic principle of the stabilizer was designed in this paper. Some hydraulic components were chosen according to the need. The specific contents include: Selection and identification the stabilizer span; checking of the strength of the dangerous section of stabilizer calculation of the vehicle stability design of the part of stabilizer hydraulic; selection of hydraulic components. The main features of the design are: simple institutions; savings investment; easy to control.Key words: concrete pump stabilizer stability目录1 绪论 (1)1.1混凝土泵车的概述 (1)1.2国内外混凝土泵车的发展概况 (1)1.3混凝土泵车现代设计方法概述 (2)2 技术参数确定 (4)2.1主要性能参数 (4)2.2混凝土泵车参数的确定 (4)3 支腿形式及相关尺寸确定 (5)3.1常见支腿结构形式 (5)3.2回转支承的相关参数 (5)4 最小安全跨距的确定 (6)4.1混凝土泵车的最不利工作状况 (6)4.2最不利工况时整车合重心范围 (6)4.2.1最不利工况时臂架合重心 (6)4.2.2臂架折叠时臂架合重心距离回转中心的距离 (7)4.2.3臂架折叠状态下整车的重心 (8)4.2.4最危险工况时重心的范围 (9)4.3泵车支腿长度的确定 (10)5 展开角度的优化 (11)5.1 整机重心轨迹方程的确定 (11)5.2泵车整机稳定性的衡量指标 (12)5.3最佳展开角度所在值域区间的判断 (13)5.4求解整机稳定性的最佳支腿展开角度 (13)5.4.1求解过程的注意点 (13)5.4.2稳定性指标的数学表达式 (13)5.5确定支腿跨距 (14)6 支腿反力的计算 (16)6.1数学模型及受力分析 (16)6.2四点支承支腿竖直方向反力计算方法 (17)6.2.1载荷P和G引起的支腿反力 (17)6.2.2力矩M引起的支腿反力 (17)6.3三点支承支腿竖直反力的计算方法 (19)6.4最大竖直反力的求解 (20)6.4.1前支腿最大竖直反力 (20)6.4.2后支腿最大竖直反力 (21)7 支腿的强度校核 (23)7.1受力、危险截面分析 (23)7.2支腿的强度校核计算 (23)7.2.1危险截面A的强度校核计算 (24)7.2.2危险截面B的强度校核计算 (24)8 销轴校核计算 (25)8.1材料的选择 (25)8.2后支腿销轴的设计 (25)8.3前支腿销轴的设计 (26)8.4销轴的润滑 (26)9 液压系统原理设计 (27)9.1液压系统型式 (27)9.1.1开式和闭式系统 (27)9.1.2单泵和多泵系统 (27)9.2液压系统的控制 (28)9.2.1定量节流控制系统 (28)9.2.2变量系统 (28)9.3液压系统设计 (29)9.4其它液压元件的设计计算 (30)9.5 液压系统性能验算 (37)结论 (41)致谢 (42)参考文献 (43)附录1 (44)英文原文 (44)译文: (56)1 绪论1.1混凝土泵车的概述混凝土泵车也称臂架式混凝土泵车,其型式定义为:将混凝土泵和液压折叠式臂架都安装在汽车或拖挂车底盘上,并沿臂架铺设输送管道,最终通过末端软管输出混凝土的机器。
现代设计方法大作业
机电工程学院现代设计方法大作业基于汽车噪声的TRIZ分析学号:S*********专业:机械工程学生姓名:***任课教师:*** 教授2015年1月基于汽车噪声的TRIZ分析一对技术系统进行初步分析1.选择系统。
我所选择的系统是汽车。
2.系统的三维图,如图1所示。
图1 汽车的三维图汽车工作原理:汽车的行驶主要靠发动机来带动,以四冲程汽油机为例,四冲程汽油机是将空气与汽油或柴油以一定的比例混合成良好的混合气,在吸气冲程被吸入汽缸,混合气经压缩点火燃烧而产生热能,高温高压的气体作用于活塞顶部,推动活塞作往复直线运动,通过连杆、曲轴飞轮机构对外输出机械能。
四冲程汽油机在进气冲程、压缩冲程、做功冲程和排气冲程内完成一个工作循环。
汽油机简图及其具体运动过程如图2所示。
图2 四冲程汽油机工作循环图(1)进气行程化油器式汽油机将空气与燃料先在气缸外部的化油器中进行混合,然后再吸入气缸。
进气行程中,进气门打开,排气门关闭。
随着活塞从上止点向下止点移动,活塞上方的气缸容积增大,从而气缸内的压力降低到大气压力以下,即在气缸内造成真空吸力。
这样,可燃混合气便经进气管道和进气门被吸入气缸。
(2)压缩行程为使吸入气缸内可燃混合气能迅速燃烧,以产生较大的压力,从而使发动机发出较大功率,必须在燃烧前将可燃混合气压缩,使其容积缩小、密度加大、温度升高,即需要有压缩过程。
在这个过程中,进、排气门全部关闭,曲轴推动活塞由下止点向上止点移动一个行程称为压缩行程。
(3)作功行程在这个行程中,进、排气门仍旧关闭。
当活塞接近上止点时,装在气缸盖上的火花塞即发出电火花,点燃被压缩的可燃混合气。
可燃混合气被燃烧后,放出大量的热能,因此,燃气的压力和温度迅速增加,所能达到的最高压力约为3-5Mpa,相应的温度则为2200-2800K。
高温高压的燃气推动活塞从上止点向下止点运动,通过连杆使曲轴旋转并输出机械能,除了用于维持发动机本身继续运转而外,其余即用于对外作功。
设计方案——喷漆烘干房
中国兵器工业喷漆烘干室设计方案盐城市中宝机械制造有限公司二0一0年8月28日目录1.设计主要参数2.设计标准3.设计目标4.设计原则5.设计要求6.设备主要性能7.设备主要技术参数8.喷漆、烘漆工作原理9.设备结构简介10.产品制造、安装、调试11.工程进度12.设备验收13.培训14.售后服务15.动力能源表16.主要外购件配套单位17.易损件及备品备件一览表18.附图:1).喷漆烘干室(总图)设计方案1、设计主要参数根据需方提出的有关技术规格和要求确定。
1.1最大工件外形尺寸(L×W×H):10000×4500×5000(mm)1.2最大工件重量: 20T1.3喷烘要求:喷漆烘干两用、冬季升温喷漆,雨季升温除湿喷漆。
1.4加热方式:超导电加热1.5烘干温度: 60℃(可调)1.6烘干时间: 0—120min(可任意设定)1.7喷烘室内的温度误差:≤±5℃1.8烘干时室体表面温度:周围环境温度+5℃1.9空气净化率:≥98%1.10漆雾处理方式:采用干式过滤的方式来捕捉废漆雾。
1.11漆雾净化率:≥96%1.12噪音:≤80db(A)1.13光照度:≥500LX1.14室内有载风速: 0.3~0.5m/s1.15送排风方式:上送下排1.16工件输送方式:卷线式电动平车1.17室内压力:室内呈微负压50~100Pa1.18喷漆室门结构形式:电动大门。
1.19三维工作台:左、右侧各1台(设置空气辅助无气喷涂系统)1.20送风洁净度:室内气体中5μm以上的尘埃100%过滤1.21控制方式:自动、手动两种控制。
具有多种保护、报警功能。
2、设计标准2.1 GB6514-2008《涂装作业安全规程涂漆工艺安全及其通风净化》2.2 GB7691-2003《涂装作业安全规程安全管理通则》2.3 GB14444-2006《涂装作业安全规程喷漆室安全技术规定》2.4 GB14443-2007《涂装作业安全规程涂层烘干室安全技术规定》2.5 GB20101-2006《涂装作业安全规程有机废气净化装置安全技术规定》2.6 GB12348-1990《工业企业厂界噪声标准》2.7 GB16297-1996《大气污染物综合排放标准》2.8 GBJ87-1985《工业企业噪声控制设计规范》2.9 GB50058-1992《爆炸和火灾危险场所电力装置设计规范》2.10 GBZI-2002《工业企业设计卫生标准》2.11 GB50034-1992《工业企业照明设计标准》2.12 JT/T324-1997《汽车喷烤漆房通用技术条件》2.13 GBZ2-2002《工作场所有害因素职业接触限值》2.14 SDJ8-1979《电力设备接地设计技术规程》2.15 GB3096-1993 《城市区域环境噪声标准》2.16 GB4053-1983 《登高梯台栏杆安全标准》2.17 GB50016-2006 《建筑设计防火规范》2.18 GB50140 《建筑灭火器配置设计规范》3、设计目标本公司一直致力于涂装设备的研究和生产。
大工14秋《结构设计原理》大作业题目及要求标准答案1
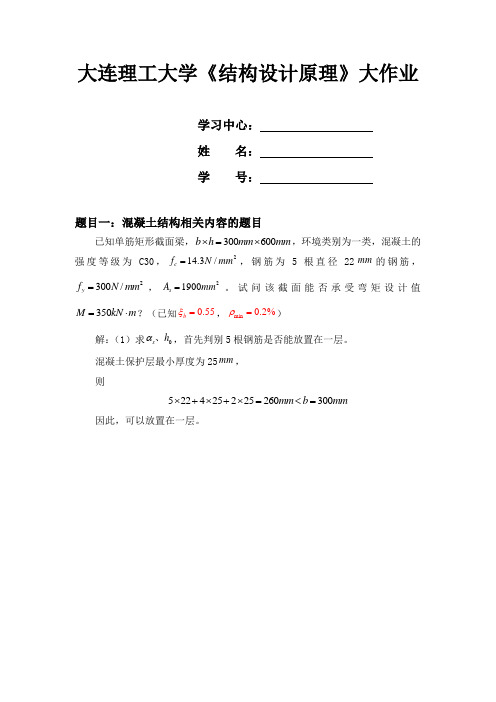
大连理工大学《结构设计原理》大作业学习中心:姓 名:学 号:题目一:混凝土结构相关内容的题目已知单筋矩形截面梁,300600b h mm mm ⨯=⨯,环境类别为一类,混凝土的强度等级为C30,214.3/c f N mm =,钢筋为5根直径22mm 的钢筋,2300/y f N mm =,21900s A mm =。
试问该截面能否承受弯矩设计值350M kN m =⋅?(已知0.55b ξ=,min 0.2%ρ=)解:(1)求0s h α、,首先判别5根钢筋是否能放置在一层。
混凝土保护层最小厚度为25mm ,则522425225260300mm b mm ⨯+⨯+⨯=<=因此,可以放置在一层。
220.52536s mm α=⨯+=060036564h mm =-=(2)求x130********.9133114.3300y sc f A x mm bf α⨯===≈⨯⨯00.55564310.2b h mm ξ≤=⨯= min 019000.0112 1.12%450.2%300564s t y A f bh f ρρ====≥==⨯(3)求u M M =0191.6()3001900(645.2)313.16322u y s x M M f A h kN m ==-=⨯⨯-=> 1333001900(564)2=⨯⨯-283.6350kN m kN m =⋅<⋅因此,该截面可以不能承受350M kN m =⋅的弯矩设计值。
题目五:砌体结构中,砌块的分类有那些?石材的分类及强度等级有哪些?砂浆的组成及作用是什么?答:砌块按尺寸和质量的大小不同分为小型砌块、中型砌块和大型砌块;砌块按外观形状可以分为实心砌块和空心砌块;按砌块在组砌中的位置与作用可以分为主砌块和各种辅助砌块;根据材料不同,常用的砌块有普通混凝土与装饰混凝土小型空心砌块、轻集料混凝土小型空心砌块、粉煤灰小型空心砌块、蒸汽加气混凝土砌块、免蒸加气混凝土砌块(又称环保轻质混凝土砌块)和石膏砌块。
机械结构创新设计及应用大作业-双齿条往复式移动机构原理及结构设计

机械机构创新设计及应用大作业(2015年春季学期)题目: 双齿条往复式移动机构原理及结构设计姓名:学号:1120810125 班级: 1208101专业: 机械设计制造及其自动化日期:2015.6.5哈尔滨工业大学机电工程学院要求1 按附录的撰写规范独立完成课程论文撰写,拒绝雷同,否则按零分处理2 大作业需同时提交打印稿和电子文档予以存档,电子文档由班长收齐(缺电子文档得零分),统一发送至:jkliu@一、设计题目1、设计要求1)双齿条往复式移动机构原理如下图所示2 3 41-上齿条2-下齿条3-不完全齿轮4-框架图1双齿条往复式移动机构原理图2)当双齿条向右运动时需产生不小于1000N的推力。
3)运动的最大速度0.05m/s。
4)往复运动行程土50mmm。
2、需完成工作1)论述其原理,给出不卡死的条件。
2)给出结构设计(必须给出齿条的支承、导向、齿轮的支承)。
3)提示:图中虽然给出了齿条由两侧推杆支承和导向,也可以把支承和导向设计在齿条上,然后在右侧设计一个推杆。
二、工作原理介绍本装置是利用不完全齿轮的定向转动,通过改变齿轮与齿条的啮合位置来实现往复运动。
假设齿轮转向为逆时针,转速为■ rad/so结合图1所示,当不完全齿轮的有齿部分与上部齿条啮合时,齿条向左运动,速度v = -「r (向右为正方向);当不完全齿轮的有齿部分与下部齿条啮合时,齿条向右运动,速度v=「r。
当齿轮与齿条不啮合时,运动台(即齿条)停止运动。
三、不卡死条件如图1所示,当不完全齿轮的轮齿与上下两个齿条同时接触时,机构会出现卡死现象。
为了防止在运动过程中机构卡死,必须保证r f:2 arcs in其中:::齿轮与齿条不啮合时所能的转动角度;r f :不完全齿轮有齿部分齿根圆半径;r a:不完全齿轮有齿部分齿顶圆半径;四、齿轮齿条设计1、齿轮结构设计由不卡死条件:::2 arcsin^其中:::不完全齿轮有齿部分对应的圆心角;r f :不完全齿轮有齿部分齿根圆半径,r^ (z 2)m/ 2 ;r a:不完全齿轮有齿部分齿顶圆半径,r f =(z-2.5)m/2 ;z:完全齿轮齿数。
(完整版)六自由度搬运机械手结构设计
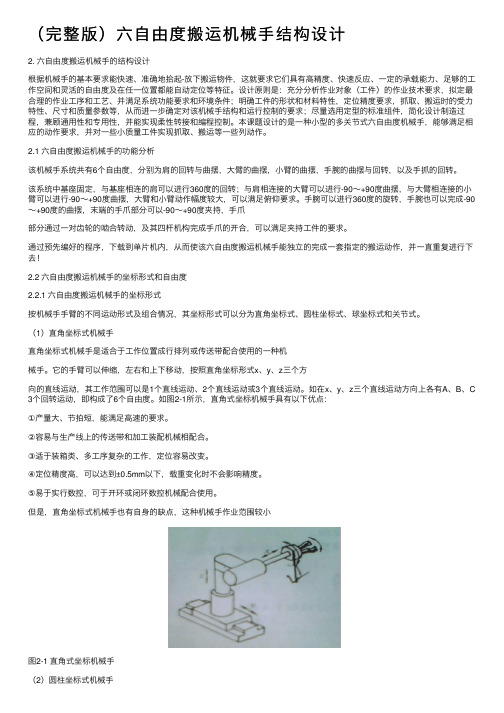
(完整版)六⾃由度搬运机械⼿结构设计2. 六⾃由度搬运机械⼿的结构设计根据机械⼿的基本要求能快速、准确地拾起-放下搬运物件,这就要求它们具有⾼精度、快速反应、⼀定的承载能⼒、⾜够的⼯作空间和灵活的⾃由度及在任⼀位置都能⾃动定位等特征。
设计原则是:充分分析作业对象(⼯件)的作业技术要求,拟定最合理的作业⼯序和⼯艺、并满⾜系统功能要求和环境条件;明确⼯件的形状和材料特性,定位精度要求,抓取、搬运时的受⼒特性、尺⼨和质量参数等,从⽽进⼀步确定对该机械⼿结构和运⾏控制的要求;尽量选⽤定型的标准组件,简化设计制造过程,兼顾通⽤性和专⽤性,并能实现柔性转接和编程控制。
本课题设计的是⼀种⼩型的多关节式六⾃由度机械⼿,能够满⾜相应的动作要求,并对⼀些⼩质量⼯件实现抓取、搬运等⼀些列动作。
2.1 六⾃由度搬运机械⼿的功能分析该机械⼿系统共有6个⾃由度,分别为肩的回转与曲摆,⼤臂的曲摆,⼩臂的曲摆,⼿腕的曲摆与回转,以及⼿抓的回转。
该系统中基座固定,与基座相连的肩可以进⾏360度的回转;与肩相连接的⼤臂可以进⾏-90~+90度曲摆,与⼤臂相连接的⼩臂可以进⾏-90~+90度曲摆,⼤臂和⼩臂动作幅度较⼤,可以满⾜俯仰要求。
⼿腕可以进⾏360度的旋转,⼿腕也可以完成-90~+90度的曲摆,末端的⼿⽖部分可以-90~+90度夹持,⼿⽖部分通过⼀对齿轮的啮合转动,及其四杆机构完成⼿⽖的开合,可以满⾜夹持⼯件的要求。
通过预先编好的程序,下载到单⽚机内,从⽽使该六⾃由度搬运机械⼿能独⽴的完成⼀套指定的搬运动作,并⼀直重复进⾏下去!2.2 六⾃由度搬运机械⼿的坐标形式和⾃由度2.2.1 六⾃由度搬运机械⼿的坐标形式按机械⼿⼿臂的不同运动形式及组合情况,其坐标形式可以分为直⾓坐标式、圆柱坐标式、球坐标式和关节式。
(1)直⾓坐标式机械⼿直⾓坐标式机械⼿是适合于⼯作位置成⾏排列或传送带配合使⽤的⼀种机械⼿。
它的⼿臂可以伸缩,左右和上下移动,按照直⾓坐标形式x、y、z三个⽅向的直线运动,其⼯作范围可以是1个直线运动、2个直线运动或3个直线运动。
钢结构梁大作业讲解

• 考虑要变截面,要留有余地 考虑要变截面,
• 2.截面改变 截面改变 • 变更截面x=l/6=3m, 与支承加劲肋一致 变更截面 = /6=3m,
M 1 = 3978 kNm, V 1 = 1319 kN
3
M1 W1 = = 1 . 284 × 10 7 mm γx f t w h0 W1 b1 t = − = 4421 mm 6 h0 变更段截面的几何性质 I 1 = 1 . 32 × 10 10 mm S = 8 . 72 × 10 6 mm
M max 7160 × 10 3 3 Wx = = = 23115 × 10 mm γxf 1.05 × 295
*梁高 梁高 最小梁高h 最小梁高 min=1585mm 经济梁高h 经济梁高 e=1764mm 取腹板高度h 取腹板高度 0=1750mm *腹板厚度 腹板厚度 抗剪要求t 抗剪要求 w=5.4mm 经验适中厚度t 经验适中厚度 w=h01/2/3.5=12mm 考虑腹板屈曲后强度,取腹板厚度t 考虑腹板屈曲后强度,取腹板厚度 w=10mm *翼缘尺寸 翼缘尺寸
区段 III : V 3 = 107 kN,
λ s = 1 . 65
V u = h w t w f V / λ 1 . 2 = 1437 kN s Q V 3 / V u = 107 / 1437 < 0 . 5 ∴用M
3
= M
max
≤ M
eu
验算
fy h0 / t w 通用高厚比 λ b= = 1 . 39 > 1 . 25 153 235 ρ = (1 - 0.2/ λ b ) / λ b = 0 . 816
30 bs ts ≥ = 7.3mm, 取t s=8mm 15 * 中部次梁处支承加劲肋 的验算
堆垛机结构设计

摘要自动化立体仓库,也叫自动化立体仓储,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化。
堆垛机是整个自动化立体仓库的核心设备,通过手动操作,半自动操作和全自动操作实现把货物从一处搬运到另一处。
它由机架(上横梁,下横梁,立柱),水平行走机构,载货台,货叉及电气控制系统构成。
本文主要是通过对一套实验室教学装置为基础,以实际为参考而建立的虚拟自动化立体仓库堆垛机系统,作者主要对堆垛机的分类进行简要的介绍,对堆垛机的各个部分的结构进行详细的研究首先对不同堆垛机简介和描述,然后通过巷道堆垛机进行整体分析并设计各个部分的结构,完成对各个部分的受力校核。
关键词:立体仓库、堆垛机、结构、受力校核。
AbstractAutomated multi-layered storehouse, also call for automated warehouse, using three-dimensional warehouse equipment can realize warehouse top rationalization, access automation, operation to handle. Stacking machine is the core of the whole automated warehouse equipment, through manual, semiautomatic operation and automatic operation to put the goods from one place to another place in handling. It is composed of (beam in beam, support), the mobile mechanism, bills, level platform, goods fork and electrical control system structure.This paper is mainly based on a set of laboratory teaching equipment as the basis, the actual for reference and establishing virtual automated multi-layered storehouse stacker system, the author mainly to the stackers classification, a brief introduction about the parts of stacker detailed study of the structure of different stacker first introduction and description, and then through the tunnel stacker integral analysis and design of structure, various parts of each part of the complete stress checking.Keywords: Automated multi-layered storehouse,Stacker,structure,Stress checking目录第1章绪论 (1)1.1自动化立体仓库的起源与发展 (1)1.2课题的提出及主要任务 (2)1.2.1 课题的提出 (2)1.2.2 课题的主要任务 (2)2、分三个部分进行功能模块设计:行走机构,升降机构,货叉的伸缩机构,并详细阐述每部分设计要点与设计过程。
履带行走装置设计

工程钻机—履带行走部分设计摘要工程机械是国民经济建设及国防工程施工中使用的重要技术装备,在国民经济建设中,尤其是城市建设、民用建筑、水利建设、道路构筑、机场修建、矿山开采、码头建造、农田改良中,工程机械起着越来越重要的作用。
我国的工程机械行业目前进入了一个高速发展阶段,推、挖、装、起重、铲土运输、筑路、农用机械等各种品种齐全并形成了系列化,各种工程机械虽然品种很多但基本上可划分为动力装置、行走装置和工作装置。
履带行走装置的挖掘机履带行驶系统包括车架。
行走装置和悬架三部分。
车架是整体骨架,用来安装所有的总成和部件。
行走装置用来支持机体,把动力装置传到驱动轮上的驱动转矩和旋转运动变为车辆工作与行驶所需的驱动力和速度。
悬架是车架和行走装置之间互相传力的连接装置。
本文在详述履带行走装置整体设计的基础上,又对驱动轮、拖链轮、导向轮、支重轮结构进行了设计,对一些关键部分进行了设计校核计算。
对各个轮的加工工艺有粗略的描述。
本文还详述了减速系统的设计包括轴、齿轮的选择及校核。
关键词:整体设计;驱动轮;支重轮;减速系统AbstractConstruction Machinery is a national economic construction and national defense construction in the importance of the use of technical equipment, construction in the national economy, especially in urban construction, civil construction, water conservancy, road building, airport construction, mining, pier construction, agricultural improvement, mechanical engineering is playing an increasingly important role. China's construction machinery industry has now entered a phase of rapid development, pushing, digging, loading, lifting, shoveling transport, roads, agricultural machinery and other species and formed a complete series, all kinds of construction machinery but although many species can basically be classified into power plant, operating equipment and working equipment.Crawler excavator crawler traveling device system includes the frame. Walking devices and suspension of three parts. Overall skeleton frame is used to install all the assemblies and components. Walking device used to support the body, the power plant came on the drive wheel torque and rotary movement into a vehicle required for work and driving the driving force and speed. Suspension is a walking frame and transmission device between the connected devices.In this paper, detailed walking track devices based on the overall design, butalso on the driving wheel, drag chain, guide wheel, supporting wheels structure design, for some of the key parts of the design verification calculation. For each round of processing technology has a rough description. This article also details the system design, including speed shaft, gear selection and verification.Keywords: the overall design, wheel, supporting wheels, slowing the Department目录摘要 (I)Abstract (II)第一章前言 (1)1.1国内履带式液压驱动底盘的现状 (1)第二章履带式行走装置的总体方案设计 (5)2.1履带式行走装置的特点 (5)2.2国内履带式液压驱动底盘的发展趋势 (5)2.3 产品的主要技术要求 (6)2.4总体设计依据 (7)2.5履带式行走装置的功用与组成 (7)2.5.1驱动轮 (8)2.5.2支重轮 (8)2.5.3导向轮 (9)2.5.4缓冲装置 (9)2.5.5托链轮 (9)2.5.6履带 (10)2.6考虑到的若干方案的比较 (11)2.7履带式行走装置的接地比压 (12)2.8运行阻力计算 (12)2.8.1履带支承长度L、轨距B和履带板宽度b (12)2.8.2履带的张紧度计算 (13)2.8.3节距 (13)2.8.4运行阻力计算 (13)2.9拟定和分析传动方案 (15)第三章传动方案的总体设计及各零部件的设计 (16)3.1选择液压马达 (16)3.2液压马达选取 (16)3.3液压泵的选取 (17)第四章驱动轮的设计 (18)4.1驱动轮的整体设计 (18)4.2 驱动轮的形状 (18)4.2.1 驱动轮的结构 (18)4.2.2 驱动轮齿数的设计计算 (18)4.3 驱动轮各部分结构尺寸 (19)4.4 轴的设计 (20)4.4.1 轴直径的确定 (20)4.4.2 心轴的强度校核 (21)4.5 轴承的计算 (22)4.6 驱动轮的加工工艺 (23)4.6.1 工艺方案 (23)4.6.2 工艺基准选择 (24)4.6.3 加工顺序的安排 (24)4.7 标准件的选择 (24)第五章支重轮和托链轮的设计及计算 (26)5.1 支重轮的直径 (26)F (26)5.1.1 支重轮的摩擦阻力"w5.1.2 支重轮的摩擦阻力 (26)5.1.3 支重轮轴强度的校核: (26)5.2 支重轮的加工工艺 (28)5.2.1选材及结构 (28)5.2.2 热处理 (29)5.2.3 表面喷丸 (30)5.2.4 压力机压铜套 (30)5.3托链轮轮及轴的强度校核 (31)5.3.1根据轴的结构图做出轴的计算简图 (31)5.3.2根据轴的计算简图做出轴的剪力图与弯矩图 (32)5.3.3确定材料的许用切应力和弯曲应力 (33)5.3.4 校核轴的剪切应力及弯曲强度 (33)第六章导向轮的整体设计 (35)6.1 导向轮的结构设计 (36)6.1.1导向轮的结构形状 (36)6.1.2轮轴的设计 (36)6.1.3轴径d的确定 (37)6.1.4 轴的强度校核 (38)6.3 导向轮外部尺寸 (39)6.3.1轮的尺寸 (39)6.4轴承的计算 (40)6.4.1验算轴承的平均压力P(单位./MPa) (40)6.4.2 验算轴承的pv (单位Mpa.m/s)值 (41)m s) (41)6.4.3 验算滑动速度v(单位/6.5 标准件的选择 (41)第七章履带的选择 (43)第八章履带张紧装置 (44)8.1结构形式和设计要求 (44)8.1.1结构形式 (44)8.1.2对张紧装置的设计要求是: (45)8.2 设计方法 (47)8.2.1履带的张紧度 (47)8.2.2缓冲弹簧的预紧力1H P 和最大弹性行程时的张力2H P 。
堆垛机的结构设计

堆垛机的结构设计摘要...................................................关键词.................................................前言……...............................................1. 绪论...............................................1.自动化立体仓库的起源与发展........................1.2 课题的提出及主要任务............................1.2.1 课题的提出…...............................1.2.2 课题的主要任务.............................1.3 堆垛机的分类....................................1.3.1 巷道式堆垛机的分类.........................1.3.2 巷道式单立柱堆垛机.........................1.3.3 双立柱巷道堆垛起重机.......................1.3.4 桥式堆垛起重机.............................1.4.1单立柱堆垛机的结构..........................1.4.2 单立柱堆垛机的优点..........................1.5 单立柱堆垛机的工作方式..........................2.堆垛机的运动循环和各部分速度计算......................2.1 堆垛机的运动循环.................................2.2 堆垛机各个部分运动速度计算.......................2.2.1走行速度......................................2.2.2升降速度......................................2.2.3 货叉的伸缩速度...............................2.2.4 额定数据表...................................3. 堆垛机各部分的结构设计和力学分析.....................3.1 堆垛机的外载荷计算...............................3.2 沿巷道纵向平面受力分析...........................3.3.1 单立柱堆垛机静态刚度分析....................3.3.2 弯矩放大系数................................3.3.3 立柱结构临界载荷............................3.4 堆垛机的设计计算.................................3.4.1 主动行走轮直径的确定.......................3.4.2 行走电动机的选用...........................3.4.3 升降电动机的选用...........................3.4.4 伸缩运动电动机的选用.......................3.5 验算运行速度和实际所需功率....................... 结论.....................................................参考文献.................................................【附表1】.................................................【附表2】.................................................致谢.....................................................立体车库堆垛机结构设计摘要自动化立体仓库,也叫自动化立体仓储,利用立体仓库设备可实现仓库高层合理化,存取自动化,操作简便化。
包装设计-纸盒结构补充
产品视觉识别
课堂练习
作业形式:
1、设计一款提携式手提袋; 2、设计一款多面体手提袋。
作业要求:
1、有针对性,有特点,方便实用,结构合理等; 2、提携式手提袋需一张卡纸一体成型; 3、多面体手提袋表面需有多个层次的块面,可使用绳索。
产品视觉识别
特 殊
产品视觉识别
结 构 类 型
② 半开槽纸箱,典型的用途是组合运输容器和货架包装及水果、蔬菜等, 结构造型有天叩地式和图中所示的浅箱结构。
产品视觉识别
结 构 类 型
③ 裹 以 包 防 式 产 品 纸 损 箱 坏 坯 , , 而 包 且 装 纸 罐 板 头 用 产 量 品 最 , 少 产 。 品 很 紧 密 ,
产品视觉识别
平 面 图
产品视觉识别
凸缘托盘和曲面顶盖
这种纸盒由一个曲面、双层内壁的盒盖和一个有凸缘的底座组成,形成倾斜的边缘,给包 装带来高贵与别致感。凸缘底座使这一纸盒与其他纸盒分开,在货架上开辟自己独有的空 间,也可以被按住为打开盒盖提供便利。这也许是对人们的特殊需要,而对产品包装作出 的特别考虑。
C、结合部位和封口
纸箱的结合部位和封口是储运受压后容易破裂的部位,除了采用一定的工艺和材料 外,在结构设计上也应当加以重视,不同的结构造型、不同的结合部位、不同的封 口方式都可以提高结合部位的强度。
产品视觉识别
纸箱中通用的结构类型
产品视觉识别
结 构 类 型
① 开槽纸箱,又称对口盖箱,是纸箱中常 用的最普通的造型结构。它使用于数 百种产品,食品尤其多用。当然使用 时若需特殊结构保护的话,还可以在 设计的基础上进行更改。
产品视觉识别
包装纸盒结构 设计
(整理)哈工大-制造系统自动化-大作业-自动导引式物料搬运小车系统设计

自动导引式物料搬运小车系统设计课程名称:制造系统自动化学生姓名:XXXX学号:10908104XX班级:0908104作业一自动导引式物料搬运小车系统设计(一)任务书一、自动导引搬运小车功能示意图图1 自动导引搬运小车结构示意图图2 小车运行线路示意图二、基本要求与参数本作业要求完成一种自动导引式物料搬运小车系统设计。
小车主要实现的功能是自动寻迹并且完成物料的搬运。
如上图所示,小车首先在A区装载物料,然后开始沿着指定轨迹(黑色导引线)自动运行,导引线宽为20mm,小车上要求装有相应的传感器用来完成寻迹和小车运行轨迹调节,保证小车始终沿着指定轨迹运行不偏离。
运行到C区以后停止,卸货后沿原路径返回A区再次装载物料,如此往复。
A、C区各有一条与导引线垂直的黑色边界线,线宽为20mm,要求小车在A、C区停止时,不能超出边界线限定范围。
(小车由蓄电池供电)相关设计参数:(1)小车运动方式:全自动导引式。
(2)小车载重能力:15Kg,自重不超过15Kg。
(3)小车运动距离:5000mm。
(4)小车运行速度:不小于0.5m/s。
三、工作量(1)小车轮系结构的设计与分析;(2)自动导引方案的设计及传感器的选择与分析;(3)小车驱动及运动控制方案的设计与分析;(4)控制流程的设计以及控制程序的编写;(5)设计说明书一份。
四、设计内容及说明(1)根据要求选择合适的传感器,设计搬运小车的自动导引系统,并进行可行性分析,保证小车能够沿着给定的路径运动。
(2)确定小车的轮系结构,如主动轮与从动轮的个数以及转向方式。
设计小车的驱动方案,确定电机的个数与类型,计算小车载重、行驶速度等技术指标,并分析论证轮系结构与驱动方案的合理性,满足设计要求。
(3)小车控制系统设计,包括确定控制方案、控制核心器件的选择、自动导引功能的实现原理、绘制控制流程框图、编制控制程序。
(二)设计说明书一、小车轮系结构的设计与分析;1、常用自动导引小车机械结构分析AGV的轮系结构是整个机械部分的核心,也是整个AGV非常关键的部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精心整理
产品结构设计大作业
绘制产品结构设计图
一、作业要求
1.参照实物细致地画出产品结构
在作业题中,有的给了参考图,有的没有。
但无论选做的题目有没有参考图,学生应尽量依照实物绘制出产品的结构图。
参考图常与实物存在差异,且有些参考图也没有把产品结构完整地表达出来,因此尽量以实物为准。
为了绘制得正确、具体、细致,一般都需要把产品拆卸下来,弄清楚各个零件以及零件之间的联结关系。
绘制一幅产品结构图需要不少时间,考虑到同学们在作业中可能花费的时间,作业题目中没有较大、较复杂的产品。
要注意,又小又简单的产品则应该绘制两幅。
产品结构设计图画完后,必须写出产品结构设计说明书。
产品结构设计说明书内容包括:
产品设计题目;
产品基本功能;
产品工作原理;
零件与零件之间的联结方式和特点说明;
主要零件所选用材料的依据;
其它需要说明的内容。
注意:产品结构设计说明书需要采用A4纸,Word排版并计算机打印。
说明书封面采用统一格式。
2.两种图样类型及其要求
学生可选用工程图或透视图来绘制产品结构图,分述如下。
(1)产品结构工程图
参照实物绘制产品结构的工程图,若细致到要标出每一个尺寸。
画工程图时,要按照机械制图标准画产品结构。
(2)产品结构透视图
设计类专业都开设有透视图(或结构素描)课程,学生绘制透视图(立体图)的基本要求是:能让陌生者看懂、看清该产品的结构。
3.作业规格及其他
1)作业图需要采用A2(420mm×594mm)或A3(297mm×420mm)规格的纸张绘制。
2)图形应绘制规整,线型清楚,幅面干净,不得存留明显的涂改痕迹。
3)在图上标注出主要零部件的名称,并附加简要的文字说明,一般会有助于陌生者的理解。
若在图上有所标注,应注意排布的匀称得当,确保字符(汉字、字母、数字)的清晰。
文字说明也可另附。
二、参考作业题
1-----一款双缸洗衣机洗衣缸的传动系统
2-----一款双缸洗衣机甩干桶的传动、制动系统
3-----一种卫生间换气扇的机械结构(附图A–5)
4-----一款面包片烤炉的结构(附图A–8)
5-----一种(或两种)自行车锁的结构(附图A–10)
6-----一种平路滑板的结构(附图A–12)
精心整理
7-----一种旅游便携小推车的结构(附图A–16)
8-----两种折叠家具的结构(在附图A–19中任选其二)
9-----一种小型手动装订机的结构(附图A–22)
10-----一款自行车气筒的结构(附图A–24)
11-----一种家电(或仪器)机箱的结构(学生自己选定,如电脑主机、DVD、微波炉等)三、作业提交时间
作业提交时间:2011年12月16日上午1:00(京时)前。
注意:
班长统一收齐作业后交给任课教师。
过期提交无成绩!!!
老师联系电话:8592398(办)
办公地址:第一综合实验楼309室
产品结构设计大作业
(二号字宋体)
姓名:(四号字宋体)
学号:
专业:
学院:
完成日期:
附图
附图A--5
附图A--8
附图A--10
附图A--12
附图A--16
附图A--19
附图A--22
附图A--24。