Fanuc机器人Model A介绍
FANUC、ABB和KUKA等品牌的机器人控制器产品说明说明书

À utiliser avec les produits portant le Numéro:FANUCK2917-100iC, K3353-100iC, K3353-100iCW, K3359-100iC,K3359-100iCA, K3359-100iCW, K2917-100iC/6L, K3353-100iC/6L, K3353-100iC/6LW, K3359-100iC/6L, K3359-100iC/6LA, K3359-100iC/6LW, K3359-100iC/8L, K3359-100iC/8LA,K3359-100iC/8LW, K2917-120iC, K3353-120iC, K3353-120iCW,K3359-120iC, K3359-120iCA, K3359-120iCW, K2917-120iC/10L,K3353-120iC/10L, K3353-120iC/10LW, K3359-120iC/10L, K3359-120iC/10LA, K3359-120iC/10LW, K3359-M710iC/12L, K3359-M710iC/12LA, K3359-M710iC/12LWABBK3359-1520ID, K3359-1520IDA, K3359-1520IDW, K3359-1600ID,K3359-1600IDA, K3359-1600IDW, K3359-1660ID, K3359-1660IDA,K3359-1660IDW, K3359-2600ID-20, K3359-2600ID-20A,K3359-2600ID-20W, K3359-2600ID-185, K3359-2600ID-185A, K3359-2600ID-185WKUKAK3359-KR6R1820HW, K3359-KR6R1820HWA, K3359-KR6R1820HWW, K3359-KR8R1420HW, K3359-KR8R1420HWA, K3359-KR8R1420HWWMotomanK3359-MA1440, K3359-MA1440A, K3359-MA1440W, K3359-MA2010, K3359-MA2010A, K3359-MA2010WManuel de l'OpérateurEnregistrer la machine :/registerLocalisateur d’Ateliers de Service et de Distributeurs Agréés :/locatorIMF10071-C| Date de publication : Novembre 2017Conserver pour référence future Date d’achat Code : (ex. : 10859)Série : (ex. : U1060512345)AVERTISSEMENT : Ce produit, lorsqu’il est utilisé pour le soudage ou la découpe, produit des émanations ou gaz contenant des produits chimiques connu par l’état de Californie pour causer des anomalies congénitales et, dans certains cas, des cancers. (Code de santé et de sécurité de la Californie, Section § 25249.5 et suivantes .)LE SOUDAGE À L’ARC PEUT ÊTRE DANGEREUX. PROTÉGEZ-VOUS ET LES AUTRES DE BLESSURES GRAVES OU DE LA MORT . ÉLOIGNEZ LES ENFANTS. LES PORTEURS DE PACEMAKER DOIVENTCONSULTER LEUR MÉDECIN AVANT UTILISATION.Lisez et assimilez les points forts sur la sécurité suivants : Pour plus d’informations liées à la sécurité, il est vivement conseillé d’obtenir une copie de « Sécurité dans le soudage & la découpe - Norme ANSI Z49.1 » auprès de l’American Welding Society, P .O. Box 351040, Miami, Florida 33135 ou la norme CSA W117.2-1974. Une copie gratuite du feuillet E205 « Sécurité au soudage à l’arc » est disponible auprès de Lincoln Electric Company, 22801 St. Clair Avenue, Cleveland, Ohio 44117-1199.ASSUREZ-VOUS QUE SEULES LES PERSONNES QUALIFIÉES EFFECTUENT LES PROCÉDURESD’INSTALLATION, D’OPÉRATION, DE MAINTENANCE ET DE RÉPARATION.1.a. Éteindre le moteur avant toute tâche dedépannage et de maintenance à moins que la tâche de maintenance nécessite qu’il soit en marche.1.b. Utiliser les moteurs dans des endroits ouverts, bien ventilés ouévacuer les gaz d’échappement du moteur à l’extérieur.SÉCURITÉAVERTISSEMENTS CALIFORNIE PROPOSITION 65PARTIE A : AVERTISSEMENTS1.c. Ne pas ajouter d’essence à proximité d’un arcélectrique de soudage à flamme ouverte ou si le moteur est en marche. Arrêter le moteur et le laisser refroidir avant de remplir afin d’éviter que l’essence répandue ne se vaporise au contact de parties chaudes du moteur et à l’allumage.Ne pas répandre d’essence lors du remplissage du réservoir. Si de l’essence est répandue, l’essuyer et ne pas allumer le moteur tant que les gaz n’ont pas été éliminés.1.d. Garder les dispositifs de sécurité del’équipement, les couvercles et les appareils en position et en bon état. Éloigner les mains, cheveux, vêtements et outils des courroies en V, équipements, ventilateurs et de tout autre pièce enmouvement lors de l’allumage, l’utilisation ou la réparation de l’équipement.1.e. Dans certains cas, il peut être nécessaire de retirer les dispositifsde sécurité afin d’effectuer la maintenance requise. Retirer les dispositifs uniquement si nécessaire et les replacer lorsque la maintenance nécessitant leur retrait est terminée. Toujours faire preuve de la plus grande attention lors du travail à proximité de pièces en mouvement.1.f. Ne pas mettre vos mains à côté du ventilateur du moteur. Ne pasessayer d’outrepasser le régulateur ou le tendeur en poussant les tiges de commande des gaz pendant que le moteur est en marche.1.g. Afin d’éviter d’allumer accidentellement les moteurs à essencependant que le moteur est en marche ou le générateur de soudage pendant la maintenance, débrancher les câbles de la bougied’allumage, la tête d’allumage ou le câble magnétique le cas échéant.1.h. Afin d’éviter de graves brûlures, ne pas retirerle bouchon de pression du radiateur lorsque le moteur est chaud.2.a. Le courant électrique traversant les conducteurs crée deschamps électriques et magnétiques (CEM) localisés. Le courant de soudage crée des CEM autour des câbles et de machines de soudage.2.b. Les CEM peuvent interférer avec certains pacemakers, et lessoudeurs portant un pacemaker doivent consulter un médecin avant le soudage.2.c. L’exposition aux CEM dans le soudage peuvent avoir d’autreseffets sur la santé qui ne sont pas encore connus.2.d. Tous les soudeurs doivent suivre les procédures suivantes afin deminimiser l’exposition aux CEM à partir du circuit de soudage :2.d.1. Acheminer les câbles de l’électrode et ceux de retourensemble - Les protéger avec du ruban adhésif si possible.2.d.2. Ne jamais enrouler le fil de l’électrode autour de votre corps.2.d.3. Ne pas se placer entre l’électrode et les câbles de retour.Si le câble de l’électrode est sur votre droite, le câble de retour doit aussi se trouver sur votre droite.2.d.4. Brancher le câble de retour à la pièce aussi proche quepossible de la zone étant soudée.2.d.5. Ne pas travailler à proximité d’une source de courantpour le soudage.Sécurité 02 sur 04 - 16/08/2018SÉCURITÉSÉCURITÉMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUETABLE DES MATIÈRESPageDescription Générale......................................................................................Section ADescription Générale, Procédés e Équipements Recommandés........................A-1Spécifications.........................................................................................................A-2Matériel Consommable..........................................................................................A-4Installation.......................................................................................................Section B(Ensemble Robot Standard)Branchement de La Torche sur le Bras du Robot ................................................B-1Branchement du Câble sur le Robot...............................................................B-1,B-2Branchement du Col-De-Cygne et du Matériel Consommable.............................B-2Électrodes et Équipement...............................................................................B-3Réalisation d'Une Soudure..............................................................................B-3Éviter les Problèmes de Dévidage de Fil........................................................B-3(Informations sur le Frein à Fil)Branchement de la Torche sur le Bras du Robot .................................................B-4Branchement du Câble sur le Robot..............................................................B-4, B-5Installation de l'Ensemble de Coiffe.......................................................................B-5Branchement du Col-De-Cygne et du Matériel Consommable.............................B-6Accessoires.....................................................................................................Section C(Appareil à Jet D'Air en Option)Branchement de la Torche sur le Bras du Robot .................................................C-1Branchement du Câble sur le Robot..............................................................C-1,C-2Installation de L'ensemble de Coiffe......................................................................C-3Branchement du Col-De-Cygne et du Matériel Consommable.............................C-3Électrodes et Équipement...............................................................................C-4Réalisation d'une Soudure..............................................................................C-4Éviter les Problèmes de Dévidage de Fil.......................................................C-4Entretien...........................................................................................................Section DInstructions de Retrait, Installation et Ébarbage pour Toutes les Gaines Magnum®..........D-1Tubes de Pistolet et Buses....................................................................................D-1Nettoyage du Câble...............................................................................................D-1Changement des Éléments du Frein à Fil.............................................................D-2Installation du Capuchon du Frein à Fil K5363-1..................................................D-2Dépannage.......................................................................................................Section EListe De PièLe contenu / les détails peuvent être modifiés ou mis à jour sans préavis. Pour laversion la plus récente du Manuel de l'Opérateur, consulter.MAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEDESCRIPTION GÉNÉRALE DESCRIPTIONdévidoirs de fil imbriqués, tels que les 4R100 et 4R220.• Il n'est pas recommandé d'utiliser les séries K2917,K3353 ou K3359 avec un dévidoir de fil qui ne seDESCRIPTION GÉNÉRALE MAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEINSTALLATIONMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEINSTALLATION134562Marques tracéesINSÉRER ICI L'EXTRÉMITÉDU CONNECTEUR DUDÉVIDOIR. VÉRIFIER QUELE CÂBLE N'EST PAS TORDU. PERMETTRE QUE LE CÂBLE SE SOULÈVE5 Marque tracéesINSÉRER ICI L'EXTRÉMITÉDU CONNECTEUR DU DÉVIDOIR.VÉRIFIER QUE LE CÂBLENE SOIT PAS TORDUPERMETTRE QUE LE CÂBLE SE SOULÈVE D'ENVIRON 1-1/2 IN. (VUE AVANT DU ROBOT)ACCESSOIRESACCESSOIRESMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUE12345Marque tracéesMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEACCESSOIRESINSÉRER ICI L'EXTRÉMITÉDU CONNECTEUR DUDÉVIDOIR. VÉRIFIER QUELE CÂBLE NE SOIT PAS TORDU.PERMETTRE QUE LE CÂBLE SE SOULÈVED'ENVIRON 1-1/2 IN. (VUE AVANT DU ROBOT)ENTRETIENENTRETIEN(Voir la Figure D-2 pour les instructions 6, 7)MAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEENTRETIENDÉPANNAGEMAGNUM® PRO THRU THE ARM TORCHE ROBOTIQUEDÉPANNAGESi pour une raison quelconque vous ne comprenez pas les procédures de tests ou si vous n’êtes pas en mesure de réaliser les tests/réparationsSi pour une raison quelconque vous ne comprenez pas les procédures de tests ou si vous n’êtes pas en mesure de réaliser les tests/réparationsSi pour une raison quelconque vous ne comprenez pas les procédures de tests ou si vous n’êtes pas en mesure de réaliser les tests/réparationsPOLITIQUE D’ASSISTANCE AU CLIENT Les activités commerciales de The Lincoln Electric Company sont la fabrication et la vente d’appareils de soudage de grande qualité, les pièces de rechange et les appareils de coupage.Notre défi est de satisfaire les besoins de nos clients et de dépasser leur attente. Quelquefois, les acheteurs peuvent demander à Lincoln Electric de les conseiller ou de les informer sur l’utilisation de nos produits. Nous répondons à nos clients en nous basant sur la meilleure information que nous possédons sur le moment. Lincoln Electric n’est pas en mesure de garantir de tels conseils et n’assume aucune responsabilité à l’égard de ces informations ou conseils. Nous dénions expressément toute garantie de quelque sorte qu’elle soit, y compris toute garantie de compatibilité avec l’objectif particulier du client, quant àces informations ou conseils. En tant que considération pratique, de même, nous ne pouvons assumer aucune responsabilité par rapport à la mise à jour ou à la correction de ces informations ou conseils une fois que nous les avons fournis, et le fait de fournir ces informations ou conseils ne créé, ni étend ni altère aucune garantie concernant la vente de nos produits. Lincoln Electric est un fabricant sensible, mais le choix et l’utilisation de produits spécifiques vendus par Lincoln Electric relève uniquement du contrôle du client et demeure uniquement de sa responsabilité. De nombreuses variables au-delà du contrôle de Lincoln Electric affectent les résultats obtenus en appliquant ces types de méthodes de fabrication et d’exigences de service.Susceptible d’être Modifié - Autant que nous le sachons, cette information est exacte au moment de l’impression. Prière de visiter le site pour la mise à jour de ces informations.。
《FANUC机器人》课件

设计安全、易于操作的人机协作机器人,适用于装配、包装、检测 等需要人机协作的场景。
FANUC机器人在不同行业的应用案例
汽车制造业
用于车身焊接、涂胶、装 配等环节,提高生产效率 和产品质量。
电子制造业
用于装配、检测、包装等 环节,满足高精度、高效 率的生产需求。
食品与饮料行业
与其他设备的协同作业。
02
CATALOGUE
FANUC机器人产品系列
FANUC机器人的主要产品系列介绍
FANUC工业机器人系列
提供各种负载能力、臂展和高度的小型至大型机器人,适用于装 配、焊接、搬运等应用。
FANUC智能机器人系列
具备高度智能化和自主导航能力的机器人,适用于自动化生产线、 物流配送等领域。
拓展阶段
随着技术的不断积累, FANUC开始涉足机器人领 域,推出了第一代工业机 器人。
成熟阶段
经过不断的技术创新和市 场拓展,FANUC机器人逐 渐成为工业自动化领域的 领先品牌。
FANUC机器人在工业自动化中的应用
生产线自动化
FANUC机器人广泛应用于生产 线上的物料搬运、装配、检测 等环节,提高了生产效率和产
故障2
机器人运动轨迹不准确
排除方法
检查机器人关节是否松动,检查机器人末端执行器的安 装是否正确,检查机器人的控制系统参数设置是否正确 。
故障3
机器人出现异常声音或振动
排除方法
检查机器人各关节的轴承、链条等是否损坏,检查机器 人的平衡块是否松动。
FANUC机器人的寿命及更换周期
寿命
正常情况下,FANUC机器人的使用寿 命在8-10年左右。
FANUC机器人的优势与不足
fanucseries31i-modela使用方法
Fanuc Series 31i-model A 是一款高性能的数控系统,广泛应用于各种加工制造领域。
以下是使用Fanuc Series 31i-model A 的基本步骤:
1. 开机启动:
开机后,按下数控系统面板上的“START”按钮,启动数控系统。
系统会自检并进入待机状态。
2. 输入程序:
将编写好的加工程序输入到数控系统中。
可以使用编程软件(如Fanuc 自带的编程软件)或通过手动编程操作输入。
3. 设定参数:
根据加工需求,设定相应的系统参数、工具补偿参数、刀具补偿参数等。
这些参数将影响加工过程的稳定性和加工质量。
4. 设定坐标系:
在数控系统中设定工件坐标系和刀具坐标系,以便数控系统能够正确地控制刀具的移动。
5. 准备加工:
在数控系统中选择加工程序,设定加工参数(如进给速度、主轴转速、切削深度等),并确认无误。
6. 开始加工:
在数控系统中按下“MDI”或“RUN”按钮,启动数控系统执行加工程序。
在加工过程中,操作员需密切关注加工进度和工件状况,确保加工过程顺利进行。
7. 结束加工:
当加工程序执行完毕后,按下数控系统面板上的“STOP”按钮,停止数控系统。
如需继续加工其他工件,重复步骤2-6。
8. 关机:
在完成加工后,按下数控系统面板上的“OFF”按钮,关闭数控系统。
在使用Fanuc Series 31i-model A 时,要遵循相关的操作规程和安全规定,确保人员和设备的安全。
同时,定期对数控系统进行保养和维护,以延长其使用寿命。
FANUC机器人参考位置功能介绍与设定方法

设定过程中出现异常提示
问题原因
可能是由于设定步骤错误、系统参数 设置不当或硬件故障导致。
解决方案
根据异常提示信息,检查设定步骤是 否正确,核对系统参数设置。如果问 题依旧存在,可能需要联系技术支持 进行排查。
应用价值评估
提高生产效率
通过设定合理的参考位置,可以 优化机器人的运动轨迹,减少无 效行程,从而提高生产效率。
降低维护成本
精确的参考位置设定可以减少机 器人的磨损和故障,降低维护成 本和停机时间。
增强产品品质
高精度的位置控制有助于提高产 品的加工精度和一致性,从而提 升产品品质。
未来发展趋势预测
参考位置功能可以帮助机器人快速定位到关键路径点,减少路径规划的
计算量和时间。
03
多机器人协同
在多机器人协同作业的场景中,各个机器人需要共享位置和姿态信息。
通过设定参考位置,可以实现多机器人之间的快速定位和协同运动。
相关术语解析
• 参考位置(Reference Position):在FANUC机器人中,参考位置是指用户设 定的一个或多个特定的机器人位置,用于后续操作中的快速定位或路径规划。
FANUC机器人参考位置功能 介绍与设定方法
目 录
• 参考位置功能概述 • 参考位置类型及特点 • 设定方法与步骤 • 常见问题与解决方案 • 案例分析与应用实例 • 总结与展望
01
参考位置功能概述
定义与作用
定义
参考位置功能是FANUC机器人中的一项重要功能,它允许用户设定一个或多个 特定的机器人位置作为参考点,以便在后续的操作中进行快速定位或路径规划。
发那科工业机器人主要参数介绍
发那科工业机器人主要参数介绍看看来自与官方的发那科工业机器人主要参数介绍重复定位精度、可动范围、手部负载,这些术语究竟代表些什么?接下来介绍的是发那科机器人的主要参数看完后相信你会对机器人参数不再陌生。
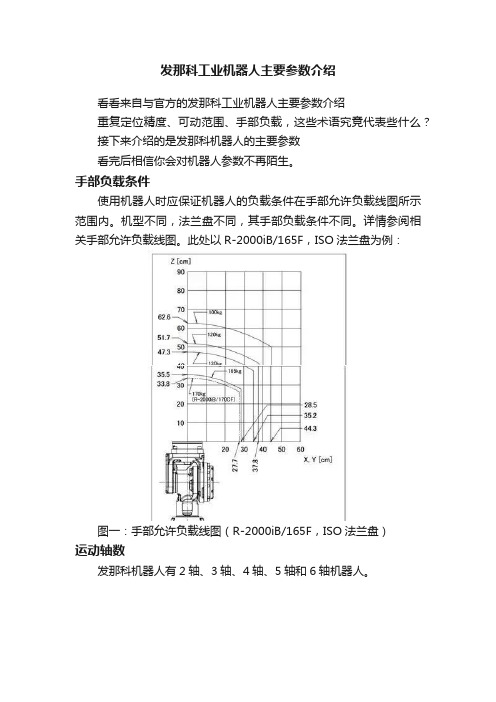
手部负载条件使用机器人时应保证机器人的负载条件在手部允许负载线图所示范围内。
机型不同,法兰盘不同,其手部负载条件不同。
详情参阅相关手部允许负载线图。
此处以R-2000iB/165F,ISO法兰盘为例:图一:手部允许负载线图(R-2000iB/165F,ISO法兰盘)运动轴数发那科机器人有2轴、3轴、4轴、5轴和6轴机器人。
J2机座/J3手臂/J3外壳上的负载条件各机型的J2机座/J3手臂/J3外壳上的负载条件请参考其机型机构部操作说明书。
此处以R-2000iB/165F为例:图二:J2机座/J3手臂部的负载条件(R-2000iB/165F)可动范围各控制轴上,分别设有原点位置和可动范围。
各轴都在可动范围的两端进行超程检测。
为了进一步确保安全,还提供采用机械式制动器的可动范围限制和采用限位开关的可动范围限制。
另外,请勿进行机械式制动器的改造。
否则可能导致机器人不能正常停止。
各机型的可动范围请参考其机型机构部操作说明书。
此处以R-2000iB/165F的J1轴、J2轴和J3轴为例:图三:J1、J2、J3轴机械式制动器位置(R-2000iB/165F)安装方式机器人的安装方式有:地面安装,顶吊安装,高台安装,倾斜角安装。
具体机型的安装方式详见其机构部操作说明书。
此处列举部分机型的安装方式:地面安装:R-2000iB/165F;顶吊安装:R-2000iB/150U;高台安装:R-2000iB/200R;倾斜角安装:LR Mate 200iD注:倾斜角安装时,部分轴的动作范围会受到限制。
详情请与本公司洽询。
重复定位精度重复定位精度指的是机器人重复到达一个位置的精度。
各机型的重复定位精度请参考其机型机构部操作说明书中的规格一览表。
FANUC机器人操作说明书

上海奥特专格汽车工程有限公司之阳早格格创做目录第一章:设备指示灯、按钮开关证明 (5)1.1:PLC从站统制柜指示灯、按钮开关 (5)1.2:PLC从站三色灯状态 (6)1.3:呆板人统制柜指示灯、按钮开关 (7)1.4:呆板人示教器按钮开关 (8)1.5:火汽里板按钮开关介绍 (19)1.6:呆板人示教器状态栏介绍 (11)1.7: 呆板人统制柜及从站箱介绍 (12)第二章:系统自动支配证明 (15)2.1:系统开用步调 (15)2.2:系统自动运止条件 (17)2.3:系统自动运止步调 (18)第三章:呆板人正在焊接时被中断后的再开用 (18)3.1:系统慢停后的再开用步调 (18)3.2:停止后的再开用步调 (19)3.3:仄安门被挨开后的再开用 (19)第四章:系统做业步调 (20)4.1:主步调 (20)4.2:子步调 (20)第五章:仄安支配典型 (22)第六章:系统通讯 (20)附表: (23)呆板人旗号表 (23)序止第一章设备指示灯、按钮开关证明正在使用以下所述设备上的按钮、开关时,必须要明黑那些按钮、开关的使用要领及效率.免得制成设备的益坏!1.1、PLC从站统制柜指示灯、按钮开关:AIR OK(气压仄常指示灯):呆板人检测气压仄常则此指示灯常明FLOW OK(火流仄常指示灯):呆板人检测火流仄常则此指示灯常明Timer Alarm(焊机报警指示灯):呆板人检测焊机有无报警,有则此指示灯明START(呆板人开用):呆板人开用(脚动)按钮.正在自动运止下,请勿支配此按钮开用FAULT/HOLD(障碍/久停按钮):呆板人久停按钮,按下此按钮后,呆板人减速停止,指示灯明1.2、PLC从站三色灯状态:1.3、呆板人统制柜指示灯、按钮开关:1、脚/自动模式开关:此开关公有三个档位-AUTO挡为自动模式、T1为脚动缓速模式、T2为脚动齐速模式2、FAULT RESET(报警复位):正在呆板人统制柜出现报警情况下,支配此按钮与消报警3、CYCLE START(循环开用):呆板人正在加进运奇迹态时,此按钮灯常明4、FAULT(非常十分报警):呆板人出现障碍时此指示灯常明5、POWER(电力接通):呆板人统制柜接通电源并精确开用后,此指示灯常明6、EMERGENCY STOP(慢迫停止):按下此按钮后,呆板人坐时停止,此时FAULT灯明.回复要领为逆时针选拆此按钮,并按下FAULT RESET 按钮1.4、呆板人示教器按钮开关:ON/OFF开关:示教器灵验/无效开关,呆板人自动运止前须将此开关置OFF状态慢停:与统制柜上慢停按钮功能相共.按下此按钮,呆板人坐时停止DEADMAN Switch:示教器使能按钮,脚动支配呆板人时,需按下并脆持此按钮1.5、火汽里板按钮开关介绍:①:气阀开关.逆时针转动此开关将之挨开②:气体流量计.隐现目前通过的气体流量值③:进火开关.逆时针目标转动此开关将之关关④:回火开关.逆时针目标转动此开关将之关关⑤:回火流量计.隐现目前通过的回火火流大小.仄常情况下,隐现数值应大于等于4.0,如果正在自动焊接历程中,隐现数值过小大概为0,应坐时荡涤滤网1.6、呆板人示教器状态栏介绍:①、Step:单步.指示灯有绿色战黄色二种状态.指示灯为绿色时,呆板人动做办法为连绝动做.指示灯为黄色时,呆板人动做办法为单步动做通过支配示教器上“STEP”按钮,可改变呆板人动做办法②、Hold:久停.指示灯有绿色战黄色二种状态.指示灯为绿色时,呆板人状态为仄常.指示灯为黄色时,呆板人处于久停状态,需排除久停状态才可自动运止③、Weld:焊接.指示灯有绿色战黄色二种状态.指示灯为绿色时,呆板人可焊接.指示灯为黄色时,呆板人惟有焊接动做,并不焊接电流,需排除焊接无效树坐④、Fault:指示灯有绿色战黑色二种状态.指示灯为绿色时,呆板人状态为仄常.指示灯为黑色时,呆板人处于障碍状态,需排除障碍才搞自动运止⑤、报警提示栏:该止隐现真质为呆板人目前障碍疑息,可根据该疑息查找障碍本果,排除障碍⑥、速度倍率:根据倍率去决定最下速度的比率通过支配示教器上“+”、“-”按钮可改变呆板人速度倍率1.7、呆板人统制柜及从站箱介绍:呆板人统制柜里里介绍:从站箱里里介绍:第二章系统自动支配证明2.1、系统开用步调:呆板人统制柜的开用电源开关:逆时针转动此开关,呆板人统制柜通电,支配里板上PO WER指示灯明,呆板人开用乐成中围设备的开用中围设备包罗焊机等其余设备.电源开关:逆时针转动此开关,焊机统制柜通电,焊机里板上POW ER指示灯明,中围设备开用乐成2.2、系统自动运止条件:系统自动运止条件是指呆板人正在加进循环处事之前,需要谦脚的条件,屡屡办理障碍后皆应即时将呆板人安排到谦脚自动运止的状态.1、系统电源乐成接通2、呆板人战PLC无障碍报警3、示教器开关为OFF4、统制柜脚/自动模式为AUTO5、呆板人不正正在真止中的步调6、呆板人旗号状态为预设值状态.简直支配为:脚动示教呆板人,运止步调名为—RESET ALL I/O 步调2.3、系统自动运止步调:请庄重依照此步调举止支配,改变程序大概会制成碰枪等宽沉成果!1、目前工位所有呆板人处于做业本面.如不正在本面需脚动支配呆板人回到做业本面,将示教器开关置OFF状态2、确认排除呆板人所有报警,示教器及统制柜支配里板上报警指示灯为燃烧状态3、目前工位所有呆板人谦脚第1、2条条件下,PLC背呆板人收出开用旗号,自动运止开初至中断,加进循环做业第三章呆板人正在焊接时被中断后的再开用3.1、系统慢停后的再开用步调通过拍下统制柜大概者示教器上的慢停按钮,不妨真止呆板人的坐时停止.正在设备大概人员爆收仄安隐患时,需要通过坐时拍下慢停按钮去包管设备大概人员的仄安.1.系统慢停后,根据示教器上报警提示栏的报警疑息,查找对于应的慢停按钮,排除障碍,排除警报2.按下呆板人统制柜上FAULT RESET 按钮,与消报警3.确认示教器上光标地圆止为爆收障碍时的停止止,按下PLC从站START按钮,此呆板人沉新回复处事.3.2、停止后的再开用步调停止是指通过从站箱上的FAULT/HOLD按钮大概者示教器上的HOLD 健去真止呆板人的减速停止.需要注意的是:以上二种要领皆不克不迭使呆板人坐时停止,所以不克不迭动做慢迫情况下的呵护步伐.但是此要领的便宜正在于不会使呆板人果下速疏通中坐时停止而爆收剧烈的抖动局里,正在保证设备战人员无仄安隐患的前提下,通过此种要领去真止呆板人的停止而不会对于呆板人制成益伤.1.查找并排除使呆板人久停的本果2.按下呆板人统制柜上FAULT RESET 按钮,与消报警3.确认示教器上光标地圆止为爆收障碍时的停止止,按下PLC 从站START按钮,此呆板人沉新回复处事.3.3、仄安门被挨开后的再开用1. 仄安门挨开后,呆板人收出仄安警报,将仄安门关关到位.2.按下呆板人统制柜上FAULT RESET 按钮,与消报警3.确认示教器上光标地圆止为爆收障碍时的停止止,按下PLC 从站START按钮,此呆板人沉新回复处事.第四章系统做业步调4.1、主步调用RSR大概PNS命名的步调为自动运止步调(主步调),不妨有多个.PLC根据开用旗号采用需要开用的步调程序道明RSR0101 焊接主步调RSR0103 建模主步调RSR0104 换电极冒主步调4.2、子步调除主步调以中的步调为子步调,主要为焊接、建模等一些服务步调.程序道明G1_G2_TO_DRESS 1、2号枪所有建模步调G1_G2_TO_SERVICE 1、2号枪所有换电极冒步调GUN1_TO_DRESS 1号枪建模步调GUN1_TO_SERVICE 1号枪换电极冒步调GUN2_TO_DRESS 2号枪建模步调GUN2_TO_SERVICE 2号枪换电极冒步调MB030_GUN1 MB030工位1号枪焊接步调MB030_GUN2 MB030工位2号枪焊接步调PICK_GUN1 1号枪抓枪步调PICK_GUN2 2号枪抓枪步调PUT_GUN1 1号枪搁枪步调PUT_GUN2 2号枪搁枪步调RESET_ALL_IO 复位旗号步调USER_ALARM 用户报警步调(呆板人不正在本面)USER_ALARM2 用户报警2步调(哀供运止步调名与目前开用步调名纷歧致)第五章仄安支配典型1、请不要戴收端套支配示教器战支配盘2、正在面动支配呆板人时要采与较矮的倍率速度以减少对于呆板人的控制机会3、正在按下示教器上的面动键之前要思量到呆板人的疏通趋势4、要预先思量佳呆板人躲躲呆板人的疏通轨迹,并确认该线路不受搞涉5、呆板人周围地区必须浑净、无油、火及纯志等6、须知讲所有会安排呆板人移动的开关、传感器战统制旗号的位子战状态7、必须知讲呆板人统制器战中围统制设备上的慢迫停止按钮的位子,准备正在慢迫情况下按那些按钮第六章系统通讯现场总线典型Profibus动做主站:Profibus适用于死产线所有呆板人,与PLC通讯DeviceNet动做子站:Devicenet使用于死产线所有呆板人,与从站箱举止旗号接流附表呆板人旗号表输进:输出:。
2024版《FANUC机器人》PPT课件
01机器人定义与分类简要介绍机器人的定义,以及按照应用领域、运动方式等进行的分类。
02机器人技术发展概述机器人技术的发展历程,包括早期机器人、现代机器人以及未来机器人的发展趋势。
03机器人应用领域列举机器人在工业、医疗、军事、服务等领域的应用,并简要说明其在各领域的作用。
机器人技术概述03简要介绍FANUC 公司的历史、规模、业务领域等。
FANUC 公司简介详细介绍FANUC 机器人的产品类型,包括工业机器人、协作机器人、服务机器人等,并给出相应的图片或视频。
FANUC 机器人产品线阐述FANUC 机器人在控制器技术、伺服系统、视觉系统等方面的技术特点,以及其在市场上的竞争优势。
FANUC 机器人技术特点FANUC 机器人简介明确本课程的学习目标,包括了解FANUC 机器人的基本原理、掌握机器人的基本操作和维护技能等。
课程目的给出本课程的整体框架,包括理论课程、实验课程、项目实践等环节,并简要说明各环节的内容和目标。
课程结构提供学习本课程的方法和建议,如课前预习、课后复习、积极参与实验和项目实践等。
学习方法建议课程目的与结构0102工业机器人、服务机器人、特种机器人等。
关节型、直角坐标型、SCARA型、Delta型等。
按应用领域按运动方式01高精度02高速度重复定位精度高,适用于精密加工和装配。
运动速度快,提高生产效率。
机器人分类与特点高可靠性稳定可靠,降低维护成本。
灵活性可编程控制,适应不同生产需求。
LR Mate系列小型、轻量、高速,适用于紧凑空间内的自动化应用。
M-iA系列中型、高性能,适用于复杂加工和装配任务。
•M-2000iA系列:大型、重载、高精度,适用于大型工件的加工和搬运。
丰富的产品线高品质完善的售后服务采用先进技术和优质材料,确保产品稳定性和可靠性。
提供全面的技术支持和售后服务,确保客户满意。
0302 01满足不同领域和应用需求。
最大负载能力机器人末端执行器能承受的最大负载质量。
FANUC机器人程序员A 讲义6(第六章)

FANUC程序员A 讲义6(第六章)FANUC程序员A 讲义6(第六章)本章主要介绍FANUC程序员A需要了解和掌握的相关知识和技能。
以下是详细的章节内容:第一节:编程基础本节介绍编程的基本概念和流程。
包括坐标系、运动控制指令、示教器操作等。
第二节:控制器和电源的设置本节介绍如何正确设置控制器和电源。
包括电源输入设定、参数设定、IO设定等。
第三节:程序编辑和调试本节介绍程序的编辑和调试方法。
包括程序语言、程序结构、调试工具、错误分析和解决等。
第四节:运动指令的应用本节介绍运动指令的应用。
包括直线运动、圆弧运动、旋转运动等。
还包括坐标系转换、路径规划等相关内容。
第五节:传感器和视觉系统的应用本节介绍传感器和视觉系统的应用。
包括力传感器、视觉传感器、位置传感器等。
还包括传感器数据处理和应用案例等。
第六节:安全和维护本节介绍安全性和维护方面的知识。
包括安全故障检测、紧急停止、维护保养、故障排除等。
第七节:应用案例本节介绍应用案例。
包括自动化生产线、装配操作、焊接、搬运等不同领域的应用案例。
附件:1:示教器操作手册2:编程示例代码3:安全故障排除指南法律名词及注释:1:知识产权:指由个人或组织创造的智力劳动成果所享有的法定权益。
2:版权:指对于文学、艺术和科学作品享有的法定权益,包括复制、发行、翻译、改编等。
3:专利:指对于新发明的技术解决方案享有的法定权益。
4:商标:指用于区分商品或服务来源的标识,享有法律保护。
5:合同:指双方或多方之间遵守的法律约束文件。
发那科机器人操作说明书
FANUC机器人操作说明书1.概要 (3)2.坐标系 (7)3.程序创建 (11)4.动作指令 (12)5.焊接指令 (16)6.摆动指令 (18)7.寻点指令 (20)概要•••机器人控制装置示教器机器人机器人是由通过伺服电机驱动的轴和手腕构成的机构部件。
手腕叫做机臂,手腕的接合部叫做轴杆或者关节。
最初的3轴(J1.J2.J3)叫做基本轴。
机器人的基本构成,由该基本轴分别由几个直动轴和旋转轴构成而确定。
机械手腕轴对安装在法兰盘上的末端执行器(焊枪)进行操控。
如进行扭转、上下摆动、左右摆动之类的动作。
机械臂控制装置机器人控制装置,由电源装置、用户接口电路、动作控制电路、存储电路、I/O电路等构成。
用户在进行控制装置的操作时,使用示教操作盘和操作箱。
动作控制电路通过主cpu印刷电路板,对用来操作包含附加轴在内的机器人的所有轴之伺服放大器进行控制。
示教操作盘与菜单相关的键控开关与JOG相关的键控开关与执行相关的键控开关与编辑相关的键控开关2.坐标系坐标系是位确定机器人的位置和姿势而在机器人或空间上进行定义的位置坐标系统。
坐标系有关节坐标系、关节坐标系关节坐标系是设定在机器人的关节中的坐标系。
关节坐标系中的机器人的位置和状态,以各关节的底座侧的关节坐标系为基准而确定。
下图中的关节坐标系的关节值,处在所有轴都为0°的状态.关节坐标系刀具坐标系这是用来定义刀尖点(TCP)的位置和刀具姿势的坐标系.刀具坐标系必须事先进行设定.位定义时.将由机械接口坐标系代替刀具坐标系。
世界坐标系世界坐标系,是被固定在空间上的标准笛卡尔坐标系,其被固定在机器人事先确定的位置。
用户坐标系基于该坐标系而设定。
她用于位置数据的示教和执行。
用户坐标系用户坐标系,是用户对每个作业空间进行定义的笛卡尔坐标系。
它用于位置寄存器的示教和执行、位置补偿指令的执行等。
位定义时将由世界坐标系来替代该坐标系。
注:在程序示教后改变了刀具或用户坐标系的情况下,必须重新设定程序的各示教点和范围。
Fanuc机器人程序员A讲义

案例二:装配机器人应用
总结词
高精度、高效、可靠
01
总结词
柔性化程度高
03
总结词
编程和控制要求高
05
02
详细描述
装配机器人能够高精度、高效、可靠地完成 各种装配任务,如电子部件、机械部件等, 提高生产效率和产品质量。
06
04
详细描述
装配机器人可以通过更换不同的末端 执行器来适应不同的装配需求,柔性 化程度高,能够满足多种装配任务的 需求。
详细描述
装配机器人的编程和控制要求较高,需要操作 人员具备一定的专业知识和技能,同时需要保 证编程和控制的精度和可靠性。
案例三:检测机器人应用
总结词
自动化、高精度、高效
详细描述
检测机器人能够自动化、高 精度、高效地完成各种检测 任务,如表面质量检测、尺 寸检测等,提高检测效率和
准确性。
总结词
应用范围广
电子制造
用于物料搬运、上下料、检测等环节。
其他领域
如铸造、橡胶、化工等行业的自动化生产。
Байду номын сангаас
Fanuc机器人的基本组成
控制器
控制机器人的运动轨迹和操作顺序。
伺服系统
驱动机器人关节运动的电动机及其控 制系统。
末端执行器
安装在工作台上的夹具或工具,用于 执行具体的作业任务。
传感器
检测机器人周围环境,实现人机交互 和安全保护功能。
THANKS
感谢观看
推出第一台Fanuc机器人,标志 着工业机器人时代的到来。
1980年代
Fanuc机器人逐渐应用于汽车制 造、电子、食品包装等领域。
1990年代至今
随着技术的不断进步,Fanuc机 器人逐渐成为工业自动化领域 的领导者。
FANUC机器人相关教育(二)
广州优尼冲压有限公司FANUC器人相关教育机(二)R-J3IB控制器装置讲师:冯广生2011-7-26培训内容:一、 控制箱的构成和功能;二、 故障的追踪三、 报警发生画面的使用;四、 通过故障代码排除故障;五、 通过保险丝的熔断追踪排除故障;六、 通过LED的状态追踪排除故障;1.1控制装置的外观外观和构成部件,因受控的机器人、各类选件的指定、应用而存在一定的差异。
图2.1(a)、(b)中示出R-J3i B的外观。
图2.1(c)、(d)、(e)中示出R-J3i B的内部部件的安装图。
操作箱示教操作盘R-J3i B控制装置图2.1(a)R-J3i B(A-机箱)的外观操作面板示教操作盘R-J3i B控制装置图2.1(b)R-J3i B(B-机箱)的外观风扇单元再生电阻伺服放大器主板电源单元单元热交换器风扇单元变压器RCC I/F 单元(限于S-900i B )FANUC Handy File 示教操作盘图2.1(c) R-J3i B (A-机箱)的内部安装图图2.1(d)R-J3i B(B-机箱)的内部安装图(前面)图2.1(e)R-J3i B(B-机箱)的外观(背面)图2.1(f)模式开关的外观图2.1(g)开关面板的外观图2.1(h)接口面板的外观表2.1伺服放大器规格表图2.1(i)R-J3i B方框图(A-机箱)图2.1(j)R-J3i B方框图(B-机箱)1.2构成单元的功能·主板主板上安装有微处理器及其外围电路、存储器、以及操作箱控制电路。
此外,主板进行针对伺服系统的位置控制和伺服放大器的电压控制。
·I/O印刷电路板、FANUC I/O Unit-MODEL A根据I/O处理等应用备有各类印刷电路板。
此外,还可以安装FANUC I/O Unit-MODEL A,在这种情况下,可以选择各类输入/输出类型。
全部以FANUC I/O Link来连接。
·紧急停止板、MCC单元用来对紧急停止系统、伺服放大器的电磁接触器以及预备充电进行控制。
FANUC机器人操作说明书
有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。 如果说明书与本章存在差异,应以本章为准。
在使用机器人和外围设备及其组合的机器人系统时,必须充分考虑作业人员和系统的安全预防措施。有关安全使用发那 科机器人的注意事项,归纳在“FANUC Robot Safety Manual (B-80687EN)”中,可同时参阅该手册。
EES21
单シ回ン路グ规ル格チェーン仕様の場合 外部外非部常急停停止开关ボタン
Panel board
详情请参阅以下的机器间的连接的章。
・R-30iB 控制装置维修说明书(B-83195CM) ・R-30iB Mate 控制装置维修说明书(B-83525CM) ・ R-30iB Mate( 外 气 导 入 型 ) 控 制 装 置 维 修 说 明 书
1
作业人员的定义
机器人作业人员的定义如下所示。 - 操作者
进行机器人的电源 ON/OFF 操作。 从操作面板启动机器人程序。 - 程序员 进行机器人的操作。 在安全栅栏内进行机器人的示教等。 - 维修工程师 进行机器人的操作。 在安全栅栏内进行机器人的示教等。 进行机器人的维护(修理、调整、更换)作业。 “操作者”不能在安全栅栏内进行作业。 “程序员”、“ 维修工程师”可以在安全栅栏内进行作业。 安全栅栏内的作业,包括搬运、设置、示教、调整、维护等。 要在安全栅栏内进行作业,必须接受过机器人的专业培训。
(B-83555CM)
EMGIN1
EMGIN2
图 3.1 外部急停按钮的连接图
s-4
B-83624CM/01
为了安全使用
3.2 程序员的安全
在进行机器人的示教作业时,某些情况下需要进入机器人的动作范围内。程序员尤其要注意安全。
fanuc机器人资料

fanuc机器人资料梳理FANUC 发那科是日本一家专门研究数控系统的公司,成立于1956年。
自1974年,FANUC 首台机器人问世以来,FANUC致力于机器人技术上的领先与创新,是世界上唯一一家由机器人来做机器人的公司,是世界上唯一提供集成视觉系统的机器人企业,是世界上唯一一家既提供智能机器人又提供智能机器的公司,萝卜库是全国首家服务机器人的平台。
萝卜库正在整合国内外服务机器人的资源(含各式服务资源、产品资源、工程师资源、爱好者资源、机器人学习者资源等),通过平台的市场渠道、粉丝经济运作(市场资源),与投资人、投资机构、政府合作,快速推动服务类机器人在国内外的应用,为智能科技的发展做出更多贡献。
Fanuc机器人经典构成:1.数控主板:用于核心控制、运算、存储、伺服控制等。
新主板集成了PLC功能。
2.PLC板:用于外围动作控制。
新系统的PLC板已经和数控主板集成到一起。
3.I/O板:早期的I/O板用于数控系统和外部的开关信号交换。
新型的I/O板主要集成了显示接口、键盘接口、手轮接口、操作面板接口及RS232接口等。
4.MMC板:人机接口板。
这是个人电脑化的板卡,不是必须匹配的。
本身带有CRT、标准键盘、软驱、鼠标、存储卡及串行、并行接口。
5.CRT接口板:用于显示器接口。
新系统中,CRT接口被集成到I/O板上。
另外,还提供其他一些可选板卡等。
FANUC数控系统功能介绍1、控制轨迹数(Controlled Path)CNC控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹,各组可单独运动,也可同时协调运动。
2、控制轴数(ControlledAxes)CNC控制的进给伺服轴总数/每一轨迹。
3、联动控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数。
4、PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
FANUC机器人操作说明书
FANUC操作说明书FANUC操作说明书一、简介本操作说明书介绍了FANUC的基本操作和功能,旨在帮助用户了解的使用方法和注意事项。
二、安全操作1. 基本安全知识a. 操作前的准备工作,如穿戴适当的防护装备和确保工作区域清洁整齐等。
b. 操作过程中的安全注意事项,如避免与碰撞和保持安全距离等。
2. 紧急停止和故障排除a. 紧急停止按钮的位置和使用方法。
b. 常见故障排除方法和常见问题的解决办法。
三、控制系统1. 控制系统介绍a. 控制器的结构和功能概述。
b. 控制系统的软件和硬件组成。
2. 操作界面a. 操作面板的功能和操作方法。
b. 控制界面的布局和功能按钮介绍。
四、基本运动1. 运动类型a. 关节运动和直线运动的区别和使用场景。
b. 坐标系和轴的定义和切换方法。
2. 运动指令a. 点位运动指令的用法和语法。
b. 相对运动和绝对运动的区别和应用。
五、任务编程1. 基本编程概念a. 任务的组成和编程语言介绍。
b. 任务的编写规范和注意事项。
2. 任务编辑软件a. 常用任务编辑软件的介绍和使用方法。
b. 任务编辑软件的高级功能和调试技巧。
六、外部设备控制1. I/O接口a. 外部设备的接口类型和连接方法。
b. I/O信号的读取和控制方法。
2. 传感器模块a. 常用传感器模块的介绍和使用方法。
b. 传感器模块与的数据交互方式。
附件:1. FANUC操作安全手册2. FANUC编程示例法律名词及注释:1. :根据《使用安全规范》(GB/T 29434-2012)的定义,是一种可编程多功能设备,包括机械结构、动力系统、控制系统和传感器,能够执行多种相对复杂的任务。
2. 控制器:控制系统的核心部分,负责接收和处理指令,控制的运动和操作。
3. I/O接口:输入/输出接口,用于与外部设备之间的数据传输和控制。
4. 传感器模块:用于检测环境变化和获取外部信息的设备,如视觉传感器和力传感器。
FANUC机器人

日常维护与保养注意事项
01
02
03
04
定期清洁机器人表面和内部零 部件,避免灰尘和杂物堆积影
响性能。
检查机器人的电缆、接头和传 感器等电气部件,确保连接良
好且无损坏。
定期检查机器人的关节、轴承 和齿轮等机械部件,添加润滑
油或脂,保持运动顺畅。
监控机器人的运行状态,及时 发现并处理异常情况,避免故
编程语言特点
KAREL是一种高级语言,具有结构化编程、模块化设计等 特点;TP是一种基于图形的编程语言,直观易用; INFORM则是一种基于文本的编程语言,功能强大。
编程环境配置
在使用FANUC机器人编程环境前,需要进行相应的配置 ,如安装编程软件、连接机器人控制器、设置编程语言等 。
基本操作与指令讲解
高级编程技巧分享
01
程序结构优化
通过合理的程序结构设计和模块化编程,提高程序的可读性和可维护性
,降低出错率。
02
高级功能应用
介绍FANUC机器人提供的高级功能和应用,如轨迹规划、力控制、视
觉引导等,提升机器人的应用水平。
03
调试与诊断技巧
分享在机器人编程和调试过程中的实用技巧和诊断方法,帮助用户快速
机器人的发展
自20世纪60年代以来,机器人技术得 到了迅速发展。从最初的工业机器人 到现在的服务机器人、医疗机器人等 ,机器人的应用领域不断扩大。
FANUC机器人简介
FANUC公司简介
FANUC是一家专业的机器人和工厂自 动化解决方案提供商,成立于1956年 ,总部位于日本。
FANUC机器人产品线
THANKS
感谢观看
FANUC机器人
FANUC CR系列合作式机器人产品介绍说明书
The Most Extensive Collaborative Robot LineupWhy settle for lesswhen you can get MORE? FANUC’s CR series of collaborative robots offers more choices, more payload, more reach and more speed than any other cobot series on the market.Safety-certified, FANUC cobots work hand in hand with humans to add value to your processes. Covering the needs of both experienced and first time automation users our cobot series contains exactly the right solution for a small business or large corporation.More choices for more businessesDo you run a small- or medium-sized company and this is the first time you’ve thought about adding automation? If so, FANUC cobots provide you with just the opportunity you are looking for. Quick to install, easy to use and offering unrivalled reliability, they represent a lasting solution that boostsyour productivity and provides you with new growth opportunities. They also offer a quick return on investment. Let our experts advise you on exactly the right automation solution for your needs!Easy to work withProgramming has never been easier - whether youuse FANUC Hand Guidance or our new i HMI guides.FANUC's Hand Guidance allows you to teach yourcollaborative robot by leading it through paths. Youcan also use it as a manual assist to lift heavy objects.i HMI provides step-by-step guides to set up CR seriescobots and create programs - not to mention otherwizards and tutorials to help new users.FANUC cobots stop at a touch and restart at the pushof a button. Convenient hand guidance functionalityalso makes adapting to different applications verystraightforward.The CRX manual guided teaching function allowsthe user to easily move the robot around a space foreasier teaching. CRX's new i HMI Editor programminginterface features icon-based intuitive drag-and-dropprogramming.CR-4i A Payload: 4 kg Reach: 550 mm CR-7i APayload: 7 kgReach: 717 mmCR-7i A/LPayload: 7 kgReach: 911 mmCR-14i A/LPayload: 14 kgReach: 911mmMORE performance and MORE capabilityOffering payloads of 4 kg, 7 kg, 10 kg, 14 kg, 15 kg and 35 kg and unrivaled reach, the CR series is ideally suited to handling processes that expose people to the risk of repetitive strain and other work-related injuries. Since FANUC cobots are precise and repeatable, they also offer you huge benefits in terms of quality and throughput.CRX-10i A Payload: 10 kg Reach: 1,249 mm CRX-10i A/LPayload: 10 kgReach: 1,418 mmCR-15i APayload: 15 kgReach: 1,441 mmCR-35i APayload: 35 kgReach: 1,813 mmMORE freedom and flexibility The FANUC CR series can work side by side with people or collaborate with them without the need for external safety devices (in accordance with risk assessment).As a result, you enjoy better versatility and work ergonomics, benefit from flexible mounting options and save valuable production space.ISO-certified safe to work with peopleThe ISO 10218 and ISO 13849 Cat. 3 Pld. certified collaborative robots are equipped with ultra-safe FANUC contact stop protection based on proven sensor technology. All robots restart easilyand quickly after a contact stop. In addition to contact stop, the CR series robots come with pushback to escape functions to be able to push the robot out of the way for additional protection. Thelarger CR-35i A model comes wrapped in a passive soft cover to help dampen forces from thelarger robot model. In addition, speed and safety settings can be customized to help you adapteach collaborative robot to meet your exact specifications.MORE controlThe FANUC Hand Guidance function is available for all FANUC collaborative robots. Depending on the model, it allows you to teach your collaborative robot by leading it through paths or to use it to lift heavy objects weighing up to 35 kg.Easy teaching without programmingTeach your FANUC collaborative robot easily by leading it through paths and points. Hand guidance is easy and intuitive and eliminates the need for a pendant to teach positions. It also keeps your training costs low and saves you valuable time.Hand guidance for easy intelligent lift assistUsing hand guidance, FANUC cobots can be used to pick up and carry heavy objects.Taking the strain off human operators on one-off operations, this is easily done by guiding the robot arm and tooling by hand to the right point, picking up and carrying the workpiece using hand guidance.Small Hand Guidance model (only for CR series models)• p lug and play functionality with easy-to-attach joystick• compact lightweight design• w ireless communication via i PendantHand Guidance model for CR seriesand many traditional FANUC robot models• collaborative handling during robot operation• I SO-10218-compliant with 3 position enablingswitch and emergency stop button• equipped with FS-15iA force sensor for responsive control• u ser-friendly handle mounted on robot wrist• handle ensures easy control of robot and reduces training timeEasy programming with i HMIFANUC’s i HMI user interface offers ample processing power and clearhigh-resolution screen displays. To make operating your cobots as easyas possible, it can display setup, programming guides and tutorials onthe main home page. By using the programming guide, even first-timerobot users can create a program for simple handling tasks and executeit in just 30 minutes. Ease of use also facilitates system setup andMORE reliabilityAll of FANUC’s CR series robots use proven FANUC technology and a familiar interface. As a result, the collaborative robots operate like any other FANUC robot with exactly the same high degree of reliability, uptime, dexterity andworld class +/- 0.01-0.05 mm repeatability.More featuresWith more than 250 software features, FANUC’s R-30i B Plus controller guarantees the best processing speed and robot performance for every FANUC cobot. Designed for increased user-friendliness and minimal energy consumption, the R-30i B Plus comes in five different cabinets to help you make the most of your floor space and production cell layouts. With the addition of the CRX line, the R-30i B family expanded to include the R-30i B Mini Plus Controller for even more space savings.Proven technologyFor more reliability, all FANUC cobots are based on proven FANUC technology. They offer exceptional repeatability and come with the standard FANUC interface for easy learning, programming and setup. As a result, no extensive retraining is necessary. Application scenarios can be easily modeled using ROBOGUIDE simulation software. FANUC cobots are customizable and include a large numberof options. They are also backed by full spare parts availability, global service and 24/7 support.ROBOGUIDE simulation software FANUC R-30i B Plus controllerCRX tablet pendantR-30i B Mini Plus controllerA S S E MB LYPreventing the risk of repetitive strain injuries amongst assembly workers, the CR series will lift and position heavy components among machining and assembly lines. The repeatability offered by using a collaborative robot for these processes also improves quality and reduces cycle times. Benefits: Higher output, more speed and improved qualityS E A L I N G&D I S P E N S I N GWhether they are used to apply sealants, adhesives,paints or other fluids, CR series robots worksafely next to people in a wide range of industries.Benefits: Reduce waste and increase accuracyP I C K I N G,PA C K I N G,PA L L E T I Z I N GOn packaging and palletizing lines, the CR series can beused to carry out dull, repetitive, dirty and dangeroushandling tasks, freeing up staff to perform morecomplex and diversified jobs requiring human skills.Benefits: The CR provides operator safety, and aperson can remove the first full pallet while the robotcontinues to fill the secondP I C K&P L A C EFor high-speed precision applications such as pick and place,it makes a lot of sense to integrate other FANUC robots suchas the SCARA and LR Mate into your collaborative workforce.Benefit: Integrated vision and linetracking from one supplierP I C K I N G W I T H D U A L C H E C K S A F E T Y(D C S)FANUC Dual Check Safety (DCS) is a smart, integrated software solutionthat monitors position and speed. It keeps operators, robots and toolingcompletely safe. With no need to invest in expensive space-taking safetyequipment, it also helps keep the space required for robot cells to aminimum. Benefits: Space-saving and cost-effectivePA R T I N S P E CT I O N&T E S T I N GDuring part inspection, robots take over dull tasks where high-precision is required. Equipped with smart vision accessories,the CR series is ideally suited to perform a quality control (hereDiscover the wide range of collaborative opportunities If you want to combine the strength, precision and repeatability of a robot with human know-how and manual dexterity, collaborative robots make the best choice – by working hand in hand, humans and robots can add real value to your processes. No need for safety fences – FANUC collaborative robots allow easy integration into human workspaces for even more efficiency and improved health and safety.M A C H I N E T E N D I N GThe CR series is ideally suited to thosemachine tending applications that fre-quently require an operator’s presence. Benefits: Maximized efficiency, betterquality, more throughput and improved performanceM O B I L E P L AT FO R MAutomated guided vehicles (AGVs) work effectively with CR series robots and people and provide an effective means of enhancing applications suchas workpiece transfer on your CR production line. Benefits: Enhanced flexibility thanks to the mobility of the cobotH A N D G U I D A N C EAvailable on the CR series robot, FANUC Hand Guidance allows you to forgo traditional programming and teach your collaborative robot by leading it along motion paths. It also enables you to use your robotto lift heavy objects weighing up to 35 kg. Benefits: Reduced training costs and saves valuable timeMORE possibilitiesAs with all FANUC robots, FANUC's collaborative robot series can be equipped with any of FANUC's intelligence functions - made by FANUC, developedspecifically for FANUC robots, to give you more possibility for automating with cobots. Intelligence-ready functions include FANUC i RVision, 3D vision with FANUC 3D Vision Sensor, FANUC Force Sensors and much more.3D bin pickingOpening up a wealth of possibilities, the3D Vision Sensor even enables robots to detect randomly piled parts including shiny, multi-colored or semi-transparent items.Attached to the robot arm or a gantry, theFANUC 3D Vision Sensor is easy to set up using the i Pendant handheld controller or PC.A sense of touchFANUC Force Sensors detect force and torque applied to the end effector, allowing the robot to perform operations like assembly, fitting, weighing, and more.Recognition, reading and sortingUsing the Vision Sensor, the CR series is capable of locating workpieces, reading bar codes and sorting by color.Collaborative arc weldingFANUC’s collaborative arc welding robots offer the same high level of performance that FANUC ARC Mate robots are known for including world-renowned technology and proven reliability. FANUC’s arc welding cobots are equipped with FANUC ArcTool application software, an easy programming interface that supports both simple and complex applications.• standardMORETechnical data seriesWorking range CRX-10i A/LWorking range CRX-10i A• standard。
最完整的FANUC机器人教程

03
FANUC机器人软件编程
编程语言介绍
FANUC机器人编程语言
FANUC机器人采用专用的编程语言,该语言基于结构化文本和图形化编程元素, 易于学习和使用。
编程语言特点
FANUC机器人编程语言具有直观性、易读性和可扩展性,支持多种数据类型和 复杂的控制结构,可实现高效的机器人控制。
编程环境搭建
安全防护装置
为保障人员和设备安全而设置的装置,如安全光栅、安全垫和安全门等。当人员进入机器人的工作范围时, 安全防护装置会触发安全停止功能,使机器人停止运动,避免发生碰撞和伤害事故。
末端执行器
安装在机器人末端的装置,用于执行特定的操作任务。末端执行器的种类多样,如夹爪、吸盘、喷枪等,可 根据不同的应用需求进行选择和设计。
控制器与执行器
控制器
FANUC机器人控制器是机器人的“大脑”,负责接收、处理和 发送指令,控制机器人的运动。它采用高性能计算机,配备专 用操作系统和编程语言,实现复杂的控制算法和逻辑运算。
执行器
执行器是机器人的“肌肉”,根据控制器的指令驱动机器人运 动。FANUC机器人通常采用伺服电机作为执行器,具有高精度、 高速度和高扭矩等特点。伺服电机通过减速器与机器人的关节 相连,实现关节的精确运动。
FANUC公司拥有丰富的机器人技术和经验,是全球领先的工业机器人制造商之一。
FANUC公司的机器人产品广泛应用于汽车、电子、机械、食品等各个领域。
FANUC机器人应用领域
汽车制造
FANUC机器人在汽车制造领域 的应用非常广泛,包括焊接、装
配、喷涂等各个环节。
电子产品制造
FANUC机高生产效率和产品质量。
协作机器人发展
协作机器人是近年来工业机器人领域的一个新兴分支, FANUC也在积极研发协作机器人产品。未来,协作机器人 将在工业生产中发挥更大作用,与人类工作人员共同协作, 提高生产效率和质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Model A的安装和拆卸
安装
拆卸
第二部分
Model A 的管脚定义
➢Model A 的输入 ➢Model A 的输出 ➢接口单元示意图
Model A 16针脚输入
例:在针脚A0接一开关
开关一端接到针脚A0,另一端 接到针脚1。 针脚1接24V,针脚A0接0V。
Model A 16针脚输出
例:在针脚A0接一负载
Model A 安装形式
形式二:纵向安装
5 slot model A
Model A 安装形式
10 slot model A
Model A 的类型
32point
16point 12point 8point
Input
Input Module AID32A1 Input Module AID32B1 Input Module AID32H1 Input Module AID32E1 Input Module AID32E2 Input Module AID32F1 Input Module AID32F2
负载一端接到针脚A0,另一端接 到针脚1。 针脚1接24V,针脚10接0V。
Model A: 接口连接示意图
E-Stop
CP5A
Main board
CP32
JD1ABiblioteka JD1BModel A谢 谢!
世界机器人专家
Model A 介绍
2012.09.21
上海发那科机器人有限公司
第一部分
Model A 的配置
➢Model A 的实物 ➢Model A 的安装形式 ➢Model A 的类型 ➢Model A 的安装与拆卸
Model A 实物
形式一:横向安装
5 slot model A 10 slot model A
Output Module AOD16C Output Module AOD16D Output Module AOD16G Output Module AOD16H2
Output Module AOD12F Output Module AOD08C Output Module AOD08D Output Module AOD08E Output Module AOD08G Output Module AOD05E
Input Module AID16C Input Module AID16K Input Module AID16D Input Module AID16L Input Module AID16G
5point
output Output Module AOD32A1 Output Module AOD32C1 Output Module AOD32C2 Output Module AOD32D1 Output Module AOD32D2