第11章 条件随机场
条件随机场的基础知识

条件随机场的基础知识条件随机场(Conditional Random Field,简称CRF)是一种概率图模型,常用于序列标注、自然语言处理、计算机视觉等领域。
它是一种无向图模型,用于建模输入序列和输出序列之间的关系。
本文将介绍条件随机场的基础知识,包括定义、特点、参数表示和推断算法等内容。
一、定义条件随机场是给定一组输入序列X的条件下,对应的输出序列Y的联合概率分布模型。
它假设输出序列Y是给定输入序列X的马尔可夫随机场,即满足马尔可夫性质。
条件随机场的定义如下:P(Y|X) = 1/Z(X) * exp(∑k∑lλkTk(yi-1, yi, X, i) +∑m∑nμnUn(yi, X, i))其中,Y表示输出序列,X表示输入序列,Tk和Un是特征函数,λk和μn是对应的权重参数,Z(X)是归一化因子。
二、特点条件随机场具有以下几个特点:1. 无向图模型:条件随机场是一种无向图模型,图中的节点表示输出序列的标签,边表示标签之间的依赖关系。
2. 局部特征:条件随机场的特征函数是局部的,只依赖于当前位置和相邻位置的标签。
3. 马尔可夫性质:条件随机场假设输出序列是给定输入序列的马尔可夫随机场,即当前位置的标签只与前一个位置的标签有关。
4. 概率模型:条件随机场是一种概率模型,可以计算输出序列的概率分布。
三、参数表示条件随机场的参数表示方式有两种:全局参数和局部参数。
1. 全局参数:全局参数表示整个条件随机场的权重参数,对所有特征函数都起作用。
2. 局部参数:局部参数表示每个特征函数的权重参数,只对对应的特征函数起作用。
四、推断算法条件随机场的推断算法主要包括前向-后向算法和维特比算法。
1. 前向-后向算法:前向-后向算法用于计算给定输入序列X的条件下,输出序列Y的边缘概率分布P(yi|X)。
它通过前向和后向两个过程,分别计算前缀和后缀的边缘概率。
2. 维特比算法:维特比算法用于求解给定输入序列X的条件下,输出序列Y的最优路径。
条件随机场入门(五)条件随机场的预测算法

条件随机场⼊门(五)条件随机场的预测算法CRF 的预测问题是给定模型参数和输⼊序列(观测序列)x , 求条件概率最⼤的输出序列(标记序列)y ∗,即对观测序列进⾏标注。
条件随机场的预测算法同 HMM 还是维特⽐算法,根据 CRF 模型可得:y ∗=arg max y P w (y |x )=arg max yexp{w ⋅F (y ,x )}Z w (x )=arg max y exp{w ⋅F (y ,x )}=arg max y w ⋅F (y ,x )于是,条件随机场的预测问题成为求⾮规范化概率最⼤的最优路径问题arg max y w ⋅F (y ,x )注意,这时只需计算⾮规范化概率,⽽不必计算概率,可以⼤⼤提⾼效率。
为了求解最优路径,将优化⽬标写成如下形式:max y n ∑i =1w ⋅F i (y i −1,y i ,x )其中,F i (y i −1,y i ,x )=f 1(y i −1,y i ,x ),f 2(y i −1,y i ,x ),…,F K (y i −1,y i ,x )T为局部特征向量。
下⾯叙述维特⽐算法。
⾸先求出位置 1 的各个标记 j=1,2,…,m 的⾮规范化概率:δ1(j )=w ⋅F 1(y 0=start ,y 1=j ,x )⼀般地,由递推公式,求出到位置 i 的各个标记 l =1,2,…m 的⾮规范化概率的最⼤值,同时记录⾮规范化概率最⼤值的路径:δi (l )=max 1≤j ≤m δi (l −1)+w ⋅F i (y i −1=j ,y i =l ,x ), l =1,2,...,m Ψi (l )=arg max 1≤j ≤m δi −1(l )+w ⋅F i (y i −1=j ,y i =l ,x ),l =1,2,...,m 直到i = n 时终⽌。
这时求得⾮规范化概率的最⼤值为max y (w ⋅F (y ,x ))=max 1≤j ≤m δn (j )及最优路径的终点y ∗n =arg max 1≤j ≤m δn (j )由此最优路径终点返回,不断的找到各个时刻的最优值:y ∗i =Ψi +1(y ∗i +1), i =n −1,n −2,…,1以上便是⼀条最优路径了,求得该最优路径:y ∗=(y ∗1,y ∗2,…,y ∗n )T 这便为条件随机场预测的维特⽐算法。
机器学习复习题及答案

一、单选题1、下列哪位是人工智能之父?()A.Marniv Lee MinskyB.HerbertA.SimonC.Allen NewellD.John Clifford Shaw正确答案:A2、根据王珏的理解,下列不属于对问题空间W的统计描述是()。
A.一致性假设B.划分C.泛化能力D.学习能力正确答案:D3、下列描述无监督学习错误的是()。
A.无标签B.核心是聚类C.不需要降维D.具有很好的解释性正确答案:C4、下列描述有监督学习错误的是()。
A.有标签B.核心是分类C.所有数据都相互独立分布D.分类原因不透明正确答案:C5、下列哪种归纳学习采用符号表示方式?()A. 经验归纳学习B.遗传算法C.联接学习D.强化学习正确答案:A6、混淆矩阵的假正是指()。
A.模型预测为正的正样本B.模型预测为正的负样本C.模型预测为负的正样本D.模型预测为负的负样本正确答案:B7、混淆矩阵的真负率公式是为()。
A.TP/(TP+FN)B.FP/(FP+TN)C.FN/(TP+FN)D.TN/(TN+FP)正确答案:D8、混淆矩阵中的TP=16,FP=12,FN=8,TN=4,准确率是()。
A.1/4B.1/2C.4/7D.4/6正确答案:B9、混淆矩阵中的TP=16,FP=12,FN=8,TN=4,精确率是()。
A.1/4B.1/2C.4/7D.2/3正确答案:C10、混淆矩阵中的TP=16,FP=12,FN=8,TN=4,召回率是()。
A.1/4B.1/2C.4/7D.2/3正确答案:D11、混淆矩阵中的TP=16,FP=12,FN=8,TN=4,F1-score是()。
A.4/13B.8/13C.4/7D.2/30.00/2.00正确答案:B12、EM算法的E和M指什么?()A.Expectation-MaximumB.Expect-MaximumC.Extra-MaximumD.Extra-Max正确答案:A13、EM算法的核心思想是?()A.通过不断地求取目标函数的下界的最优值,从而实现最优化的目标。
条件随机场模型中的特征选择与抽取(十)

条件随机场(Conditional Random Field, CRF)是一种用于序列标注和结构化预测的概率图模型。
它在自然语言处理、计算机视觉等领域有着广泛的应用,如命名实体识别、分词、词性标注等任务。
CRF模型的性能很大程度上取决于特征的选择和抽取。
本文将结合实际案例,探讨CRF模型中特征选择与抽取的一些技巧和注意事项。
数据准备首先,我们需要准备好用于训练和测试的数据。
在NLP任务中,通常会使用已经标注好的语料库作为数据集。
一个常见的做法是将数据集分为训练集和测试集,以便评估模型的性能。
另外,为了减少模型过拟合的风险,还可以使用交叉验证的方法。
特征选择在CRF模型中,特征选择是非常重要的一步。
特征的选择应该充分考虑到任务的领域知识和实际需求。
以命名实体识别为例,可以考虑选择词性、词性组合、前后词性等特征。
此外,还可以考虑上下文信息、词性转移概率等特征。
需要注意的是,特征的数量不能过多,否则会导致模型的复杂度过高,训练时间过长。
特征抽取特征抽取是将原始数据转化为模型可以处理的特征表示形式。
在NLP任务中,常用的特征抽取方法包括词袋模型、TF-IDF、word embedding等。
在CRF模型中,一般会将输入序列转化为特征向量序列。
需要注意的是,特征抽取过程中要考虑到数据的稀疏性和维度灾难问题。
可以通过降维、特征选择等方法来解决这些问题。
特征模板在CRF模型中,特征模板是描述特征之间关系的一种形式。
特征模板的设计直接影响到模型的性能。
在实际应用中,往往需要根据具体任务和数据的特点来设计特征模板。
以命名实体识别为例,可以设计包括当前词的特征、上下文特征、前缀和后缀特征等多种特征模板。
需要注意的是,特征模板的数量不宜过多,否则会导致模型复杂度过高。
实例分析下面我们以中文分词任务为例,来看一下特征选择与抽取在CRF模型中的具体应用。
假设我们有一段中文文本“我爱北京天安门”,需要对其进行分词。
首先,我们可以选择一些基本的特征,如词本身、词性等。
《条件随机场》课件
01
•·
02
基于共轭梯度的优化算法首先使用牛顿法确定一个大致的 参数搜索方向,然后在该方向上进行梯度下降搜索,以找 到最优的参数值。这种方法结合了全局和局部搜索的优势 ,既具有较快的收敛速度,又能避免局部最优解的问题。
03
共轭梯度法需要计算目标函数的二阶导数(海森矩阵), 因此计算量相对较大。同时,该方法对初始值的选择也有 一定的敏感性。在实际应用中,需要根据具体情况选择合 适的优化算法。
高效存储
研究如何利用高效存储技术(如分布式文件系统、NoSQL数据库 等)存储和处理大规模数据。
06
结论与展望
条件随机场的重要性和贡献
01
克服了传统机器学习方法对特征工程的依赖,能够 自动学习特征表示。
02
适用于各种自然语言处理和计算机视觉任务,具有 广泛的应用前景。
03
为深度学习领域带来了新的思路和方法,推动了相 关领域的发展。
概念
它是一种有向图模型,通过定义一组条件独立假设,将观测 序列的概率模型分解为一系列局部条件概率的乘积,从而简 化模型计算。
条件随机场的应用场景
序列标注
在自然语言处理、语音识别、生物信 息学等领域,CRF常用于序列标注任 务,如词性标注、命名实体识别等。
结构化预测
在图像识别、机器翻译、信息抽取等 领域,CRF可用于结构化预测任务, 如图像分割、句法分析、关系抽取等 。
04
条件随机场的实现与应用
自然语言处理领域的应用
词性标注
条件随机场可以用于自然语言处理中 的词性标注任务,通过标注每个单词 的词性,有助于提高自然语言处理的 准确性和效率。
句法分析
条件随机场也可以用于句法分析,即 对句子中的词语进行语法结构分析, 确定词语之间的依存关系,有助于理 解句子的含义和生成自然语言文本。
条件随机场相关的方法
条件随机场相关的方法全文共四篇示例,供读者参考第一篇示例:条件随机场(Conditional Random Fields, CRF)是一种统计建模方法,常用于序列标注、自然语言处理和计算机视觉等领域。
CRF的主要优势是可以利用上下文信息进行建模,以及可以处理由于标签之间的依赖关系导致的标签歧义问题。
本文将介绍一些与条件随机场相关的方法,包括CRF的基本概念、CRF的训练和推断算法、以及CRF 在自然语言处理和计算机视觉中的应用。
一、CRF的基本概念CRF是一种概率图模型,用于对序列数据进行建模。
在CRF中,我们需要定义一个特征函数集合,每个特征函数表示输入序列和输出标签之间的依赖关系。
给定一个输入序列X和对应的输出标签序列Y,我们可以定义CRF的概率分布为:P(Y|X) = 1/Z(X) * exp(∑wi*fi(Y,X))其中Z(X)是规范化因子,使得条件概率分布P(Y|X)的所有可能取值的总和等于1;wi是特征函数fi的权重。
二、CRF的训练和推断算法CRF的训练过程通常使用最大似然估计或最大熵准则,通过利用训练数据集的标注信息来学习特征函数的权重。
CRF的推断过程通常使用近似推断算法,如维特比算法或前向-后向算法,来寻找给定输入序列X的最优输出标签序列Y。
三、CRF在自然语言处理中的应用在自然语言处理领域,CRF常用于词性标注、命名实体识别、句法分析等任务。
通过利用上下文信息和标签之间的依赖关系,CRF可以在这些任务中取得更好的性能。
四、CRF在计算机视觉中的应用条件随机场是一种强大的概率建模方法,可以用于序列标注、自然语言处理、计算机视觉等各种领域。
通过使用CRF,我们可以充分利用上下文信息和标签之间的依赖关系,从而提高模型的性能和泛化能力。
希望本文介绍的与条件随机场相关的方法能够对读者有所帮助。
第二篇示例:条件随机场(Conditional Random Field, CRF)是一种用于序列标注问题的概率模型,它在自然语言处理、计算机视觉、生物信息学等领域都有广泛的应用。
条件随机场综述

α t (i ) = P(Ο1 Ο 2 α t (i ) 为部分观察序列 Ο1Ο 2 α j (t + 1) = P (Ο1Ο 2
= P (Ο 1 Ο 2 = P (Ο 1 Ο 2 = ∑ P (Ο 1 Ο 2
i =1 N
Ο t , qt = si | λ )
(3)
即对于模型 λ ,在 t 时刻,状态为 S i 时的部分观察序列 Ο 1 Ο 2
T 是观察序列的字符个数。
三个概率矩阵 A, B, π ,也即隐马尔可夫模型可形式化定义为一个五元组 ( N , M , A, B, π ) 。 以上介绍了隐马尔可夫模型的五个要素, 下面我们介绍隐马尔可夫模型的三个基本问题 及相应的解决方法。 从以上的讨论可知,一个完整的隐马尔可夫模型要求两个具体的模型参数 N 和 M ,和
(4)
下图说明了在 t 时刻从 N 个状态 S i , 1 ≤ i ≤ N 到达 t + 1 时刻的状态 S j 的 forward 过程,
s1 s2
a1 j a2 j a Nj sj
sN
α t (i)
图 2 forward 计算
t
α t +1 ( j )
t+1
由以上可知 α t (i ) 是观察序列 Ο 1 Ο 2 是观察序列 Ο 1 Ο 2
2.4 forward-backward 算法
问题 1 是一个评价问题,即给定一个模型 λ 和一个观察序列 Ο = Ο 1 Ο 2
Ο T ,如何计
T
算由模型产生这一观察序列的概率 P (Ο | λ ) 。最直接的方法是枚举所有长度为 T,输出观察 序列为 Ο 的可能的状态序列。假设状态数为 N ,时枚举方法的计算量为 2T ⋅ N ,使该方 法的在计算上不可行。目前可采用 forward-backward 算法解决这个问题。 forward-backward 过程[3][4]:定义 forward 变量 α t (i ) 为
自然语言处理中常见的命名实体识别模型(九)

自然语言处理(NLP)是人工智能领域中的一个重要分支,其研究的核心问题之一就是命名实体识别(NER)。
命名实体识别是指识别文本中具有特定意义的实体,如人名、地名、组织机构名等。
在NLP中,命名实体识别是一项基础性任务,对于许多应用场景都有着重要的意义。
在本文中,我们将介绍几种常见的命名实体识别模型。
一、条件随机场(CRF)条件随机场是一种概率图模型,常用于序列标注问题,如命名实体识别。
CRF模型能够利用上下文信息来提高实体识别的准确性,其模型结构能够捕捉实体之间的依赖关系,从而更好地识别实体边界。
CRF模型在命名实体识别任务中表现出色,尤其是在标注数据较为充分的情况下,可以达到较高的准确率和召回率。
然而,CRF模型也存在一些问题,比如对于长距离依赖关系的建模能力有限,同时需要大量标注数据进行训练。
二、循环神经网络(RNN)循环神经网络是一种能够处理序列数据的神经网络模型,常用于自然语言处理任务中。
在命名实体识别任务中,RNN模型能够通过学习上下文信息来识别实体,其记忆性能使得其能够捕捉长距离的依赖关系。
然而,传统的RNN模型存在梯度消失或梯度爆炸等问题,导致其在长序列数据上的训练效果不佳。
为了解决这一问题,人们提出了一系列的改进模型,如长短时记忆网络(LSTM)和门控循环单元(GRU),这些模型在命名实体识别任务中取得了显著的性能提升。
三、注意力机制(Attention)注意力机制是一种能够学习对输入数据进行加权处理的机制,常用于处理序列数据。
在命名实体识别任务中,注意力机制能够帮助模型更好地关注关键信息,从而提高实体识别的准确性。
基于注意力机制的模型,如Transformer模型,在NLP领域取得了巨大成功,其在命名实体识别任务中也表现出色。
四、深度学习与迁移学习近年来,深度学习技术的发展为命名实体识别任务带来了新的机遇。
深度学习模型能够从大规模数据中学习特征表示,从而提高命名实体识别的性能。
【算法】CRF(条件随机场)
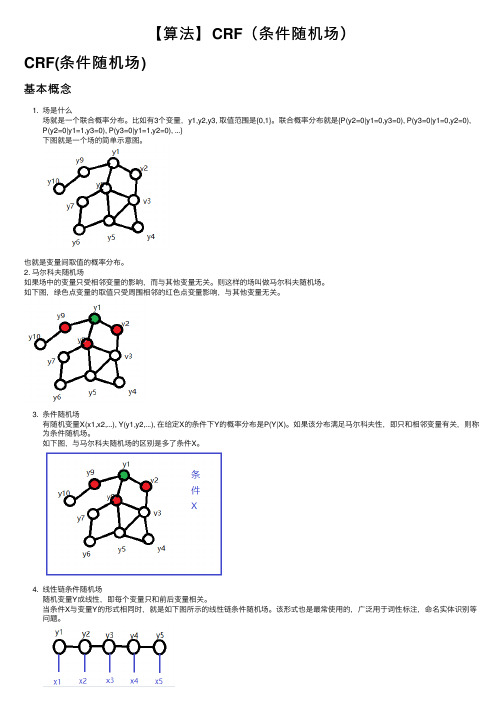
【算法】CRF(条件随机场)CRF(条件随机场)基本概念1. 场是什么场就是⼀个联合概率分布。
⽐如有3个变量,y1,y2,y3, 取值范围是{0,1}。
联合概率分布就是{P(y2=0|y1=0,y3=0), P(y3=0|y1=0,y2=0), P(y2=0|y1=1,y3=0), P(y3=0|y1=1,y2=0), ...}下图就是⼀个场的简单⽰意图。
也就是变量间取值的概率分布。
2. 马尔科夫随机场如果场中的变量只受相邻变量的影响,⽽与其他变量⽆关。
则这样的场叫做马尔科夫随机场。
如下图,绿⾊点变量的取值只受周围相邻的红⾊点变量影响,与其他变量⽆关。
3. 条件随机场有随机变量X(x1,x2,...), Y(y1,y2,...), 在给定X的条件下Y的概率分布是P(Y|X)。
如果该分布满⾜马尔科夫性,即只和相邻变量有关,则称为条件随机场。
如下图,与马尔科夫随机场的区别是多了条件X。
4. 线性链条件随机场随机变量Y成线性,即每个变量只和前后变量相关。
当条件X与变量Y的形式相同时,就是如下图所⽰的线性链条件随机场。
该形式也是最常使⽤的,⼴泛⽤于词性标注,命名实体识别等问题。
对于词性标注来说,x就是输⼊语句的每⼀个字,y就是输出的每个字的词性。
线性链条件随机场的表⽰设\(P(Y|X)\)是线性链条件随机场,则在给定\(X\)的取值\(x\)的情况下,随机变量\(Y\)取值为\(y\)的条件概率可以表达为:\[P(y|x)=\frac{1}{Z(x)}exp\left(\sum_{i,k}{\lambda_kt_k(y_{i-1}, y_i,x,i)}+\sum_{i,l}\mu_ls_l(y_i,x,i)\right) \]\[Z(x)=\sum_yexp\left(\sum_{i,k}{\lambda_kt_k(y_{i-1}, y_i,x,i)}+\sum_{i,l}\mu_ls_l(y_i,x,i)\right) \]\(i\): 表⽰当前位置下标\(t_k()\):表⽰相邻两个输出间的关系,是转移特征函数。
机器学习期末复习题及答案

一、单选题1、在条件随机场(CRF)中,参数的学习通常使用哪种优化算法?()A.K-Means聚类B.梯度提升机(GBM)C.支持向量机(SVM)D.随机梯度下降(SGD)正确答案:D2、在概率无向图模型中,什么是团分解(Cluster Decomposition)?()A.一种通过节点之间的边传播信息,以更新节点的边缘概率的方法B.一种用于计算图的分割的算法C.一种将联合概率分布分解为多个局部概率分布的方法D.一种用于表示联合概率分布的无向树正确答案:C3、在数据不完备时,下列哪一种方法不是贝叶斯网络的参数学习方法()A.拉普拉斯近似B.最大似然估计方法C.蒙特卡洛方法D.高斯逼近正确答案:B4、在有向图模型中,什么是条件独立性?()A.给定父节点的条件下,子节点之间独立B.所有节点之间都独立C.所有节点的状态相互独立D.任意两个节点都是独立的正确答案:A5、在概率有向图模型中,节点表示什么?()A.变量B.参数C.条件概率D.边正确答案:A6、下列哪一项表示簇中样本点的紧密程度?()A.簇个数B.簇大小C.簇描述D.簇密度正确答案:D7、闵可夫斯基距离表示为曼哈顿距离时p为:()A.1B.2C.3D.4正确答案:A8、谱聚类与K均值聚类相比,对于什么样的数据表现更好?()A.低维数据B.高维数据C.线性可分数据D.高密度数据正确答案:B9、SVM适用于什么类型的问题?()A.既可用于线性问题也可用于非线性问题B.仅适用于回归问题C.仅适用于非线性问题D.仅适用于线性问题正确答案:A10、对于在原空间中线性不可分的问题,支持向量机()A.在原空间中寻找非线性函数划分数据B.无法处理C.利用核函数把数据映射到高维空间D.在原空间中寻找线性函数划分数据正确答案:C11、LDA主题模型中的alpha参数控制着什么?()A.单词分布的稀疏性B.文档-主题分布的稀疏性C.模型大小D.模型收敛速度正确答案:B12、LDA的全称是什么?()tent Dirichlet AllocationB.Linear Discriminant Analysistent Data AnalysisD.Lin Latent Dirichlet Allocation ear Data Algorithm正确答案:A13、以下对于梯度下降法中学习率lr的阐述,正确的是()A.lr小,收敛速度较快B.lr大,收敛速度较慢C.lr小,收敛速度较慢且较不易收敛D.lr大,收敛速度较快但可能导致不收敛正确答案:D14、在EM算法中,E代表期望,M代表()A.均值B.最大化C.最小化D.均方误差正确答案:B15、梯度下降中如何有效地捕捉到目标函数的全局最优?()A.调整学习速率B.增加模型复杂度C.使用梯度下降的变种算法D.增加训练样本量正确答案:C二、多选题1、下列机器学习常用算法中哪个属于分类算法?()A.K-meansB.最小距离分类器C.KNN(K近邻)D.逻辑回归正确答案:B、C、D2、下列关于决策树的说法正确的是?()A.CART使用的是二叉树B.其可作为分类算法,也可用于回归模型C.不能处理连续型特征D.它易于理解、可解释性强正确答案:A、B、D3、下列属于k近邻算法中常用的距离度量方法的是?()A.余弦相似度B.欧式距离C.曼哈顿距离D.闵可夫斯基距离正确答案:A、B、C、D4、下列属于深度模型的是?()A.DNNB.LightgbmC.LSTMD.Seq2Seq正确答案:A、C、D5、sklearn中RFECV方法分成哪两个部分?()A.RFEB.CVC.NLPD.MM正确答案:A、B6、以下关于蒙特卡洛方法描述正确的是()A.蒙特卡洛方法计算值函数可以采用First-visit方法B.蒙特卡洛方法方差很大C.蒙特卡洛方法计算值函数可以采用Every-visit方法D.蒙特卡洛方法偏差很大正确答案:A、B、C7、为什么循环神经网络可以用来实现自动问答,比如对一句自然语言问句给出自然语言回答()A.因为自动问答可以看成是一种序列到序列的转换B.因为循环神经网络能够处理变长输入C.因为循环神经网要比卷积神经网更强大D.因为卷积神经网络不能处理字符输入正确答案:A、B8、通常有哪几种训练神经网络的优化方法()A.梯度下降法B.随机梯度下降法C.小批量随机梯度下降法D.集成法正确答案:A、B、C9、隐马尔可夫模型的三个基本问题是()A.估值问题B.寻找状态序列C.学习模型参数D.状态更新正确答案:A、B、C10、在数据不完备时,贝叶斯网络的参数学习方法有()A.高斯逼近B.蒙特卡洛方法C.拉普拉斯近似D.最大似然估计方法正确答案:A、B、C11、基于约束的方法通过统计独立性测试来学习结点间的()A.独立性B.相关性C.依赖性D.完备性正确答案:A、B12、基于搜索评分的方法,关键点在于()A.确定合适的搜索策略B.确定评分函数C.确定搜索优先级D.确定选择策略正确答案:A、B13、条件随机场需要解决的关键问题有()A.特征函数的选择B.参数估计C.模型推断D.约束条件正确答案:A、B、C14、以下关于逻辑斯蒂回归模型的描述正确的是()A.针对分类的可能性进行建模,不仅能预测出类别,还可以得到属于该类别的概率B.直接对分类的可能性进行建模,无需事先假设数据分布,这样就避免了假设分布不准确所带来的问题C.模型本质仍然是一个线性模型,实现相对简单D.逻辑斯蒂回归模型是线性回归模型正确答案:A、B、C、D15、LDA模型在做参数估计时,最常用的方法是()A.Gibbs采样方法B.变分推断C.梯度下降D.Beam search正确答案:A、B三、判断题1、关于EM算法的收敛性,EM算法理论上不能够保证收敛()正确答案:×2、多次运行,随机化初始点是对存在局部最优点的函数求解的一种方案()正确答案:√3、训练算法的目的就是要让模型拟合训练数据()正确答案:×4、循环神经网络按时间展开后就可以通过反向传播算法训练了()正确答案:√5、GIS算法的收敛速度由计算更新值的步长确定。
条件分布定义及其在随机过程中的应用

条件分布定义及其在随机过程中的应用在概率论中,条件分布是指在给定一些信息或事件时,随机变量的概率分布。
简单地说,条件分布是指事件发生的条件下,其他事件发生的概率。
条件分布在随机过程中有很多应用,本文将对条件分布的定义及其在随机过程中的应用进行深入讨论。
一、条件分布的定义条件分布的定义可以由条件概率来推导。
设A、B是两个事件,且P(B)>0,则在事件B发生的条件下事件A的条件概率为:P(A|B) = P(AB) / P(B)其中,P(AB)表示事件A和B同时发生的概率,P(B)表示事件B发生的概率。
如果X和Y是两个随机变量,P(Y=y)>0,则在Y=y的条件下X的条件概率为:P(X=x|Y=y) = P(X=x,Y=y) / P(Y=y)其中,P(X=x,Y=y)表示X=x和Y=y同时发生的概率,P(Y=y)表示随机变量Y=y的概率。
进一步地,可以得到X的条件分布函数:F(x|Y=y) = P(X≤x|Y=y)X的条件概率密度函数f(x|Y=y)则由条件分布函数求导得到:f(x|Y=y) = d/dx F(x|Y=y)二、条件分布的特性条件分布具有以下一些特性:1. 相互独立性:如果X和Y是独立的,则P(X=x|Y=y) =P(X=x)。
2. 概率归一性:条件概率和等于1,即∑ P(X=x|Y=y) = 1。
3. 乘法公式:由条件概率的定义可以得到乘法公式:P(X=x,Y=y) = P(Y=y|X=x)P(X=x)4. 全期望公式:设X和Y是两个随机变量,则:E(X) = E[E(X|Y)]其中,E(X|Y)表示在Y条件下X的期望。
三、条件分布的应用条件分布在随机过程中有很多应用,本节将讨论其中的一些应用。
1. 马尔可夫性质在马尔可夫链中,当前状态只与前一状态有关,在这种情况下,当前状态的条件分布只与前一状态有关。
具体地说,可以得到下面的等式:P(Xn+1 = j|Xn=i,Xn-1=k,Xn-2=l,…,X0) = P(Xn+1=j|Xn=i)其中,Xn表示第n个状态,Xn+1表示第n+1个状态,i、j、k、l是两个状态之间的节点。
条件随机场-详细

序列标注
标注:人名 地名 组织名 观察序列:毛泽东
实体命名 识别
标注:名词 动词 助词 形容词 副词 …… 观察序列:今天天气非常好! 汉语词性 标注
一、产生式模型和判别式模型(Generative model vs. Discriminative model) 二、概率图模型(Graphical Models) 三、朴素贝叶斯分类器( Naive Bayes Classifier) 四、隐马尔可夫模型(Hidden Markov Model,HMM) 五、最大熵模型(Maximum Entropy Model,MEM) 六、最大熵马尔可夫模型(MEMM) 七、条件随机场(conditional random fields,CRF)
Observed Ball Sequence
评价问题
问题1:给定观察序列 X x1 , x2 ,, xT 以及模型 ( , A, B) , 计算 P( X )
解码问题
问题2:给定观察序列 X x1 , x2 ,, xT 以及模型λ,如何选择一个对应的状 态序列Y ( y1 , y2 ,, yN ,使得 Y能够最为合理的解释观察序列X? )
无法生成样本,只能判断分类,如SVM,CRF,MEMM 。
产生式模型:无穷样本 ==》 概率密度模型 = 产生模型 ==》预测 判别式模型:有限样本 ==》 判别函数 = 预测模型 ==》预测
一个举例: (1,0), (1,0), (2,0), (2, 1) 产生式模型: P (x, y): P(1, 0) = 1/2, P(1, 1) = 0, P(2, 0) = 1/4, P(2, 1) = 1/4. 判别式模型: P (y | x): P(0|1) = 1, P(1|1) = 0, P(0|2) = 1/2, P(1|2) = 1/2
条件随机场

条件随机场条件随机场(Conditional Random Fields,CRF)是一种概率图模型,常用于序列标注问题。
它是基于给定输入序列的条件下,对输出序列进行建模的方法。
CRF的设计使得它特别适用于自然语言处理和计算机视觉等领域的序列标注任务。
设输入序列为X,输出序列为Y,我们的目标是根据输入序列X预测输出序列Y。
CRF将标注问题建模为一个条件概率模型P(Y,X),即给定输入序列X下输出序列Y的条件概率分布。
CRF的核心思想是将标注问题转化为一个由输入序列和输出序列共同决定的全局能量最小化问题。
在CRF中,输出序列Y的概率分布由特征函数的线性组合表示,特征函数是关于输入序列X和输出序列Y的函数。
特征函数可以根据问题的特定需求来设计。
经典的特征函数有:1.状态特征函数:描述当前状态下的输出特征,例如当前词的词性标记。
2.转移特征函数:描述相邻状态之间的输出特征,例如当前词的词性标记和下一个词的词性标记之间的转移特征。
3.开始特征函数和结束特征函数:描述开始和结束状态的输出特征。
CRF的核心是定义全局能量函数,其通过特征函数的线性组合来度量给定输入序列X和输出序列Y的不匹配程度。
全局能量函数可以表示为以下形式:E(Y,X)=∑F_k(Y,X)∙w_k其中,F_k(Y,X)表示第k个特征函数,w_k表示对应的权重。
全局能量函数越小,意味着输出序列Y的概率越大。
在CRF中,我们通过最大熵原理来确定权重w_k。
最大熵原理认为模型在给定输入序列X下的条件下,应当满足的约束是使得模型的熵达到最大。
我们使用拉格朗日乘子法来求解权重w_k,以最小化目标函数。
在训练阶段,我们使用训练数据来估计CRF模型的参数(即权重w_k)。
常用的参数估计方法有最大似然估计和最大正则化似然估计。
在预测阶段,给定一个新的输入序列X,我们可以使用动态规划算法(如前向-后向算法)来求解输出序列的最优解。
动态规划算法可以高效地计算全局能量函数。
第 章++概率图模型 上

信封问题
• 随机变量 ������ ∈ 1,0 , ������ ∈ 红, 黑 • ������ ������ = 1 = ������ ������ = 0 = 1⁄2 • ������ ������ = 红 E = 1 = 1⁄2 , ������ ������ = 红 E = 0 = 0
• 实际上我们考察:������ ������ = 1 ������ = 黑 ≥ 1⁄2 ?
朴素贝叶斯
• ������ ������ ������1, ⋯ , ������6 ∝ ������ ������ ∏6������=1 ������ ������������ ������ • ������ + ������ + ������ + ������ + ������ + ������ + ������ = ������
信封问题
• 桌上有两个信封,其中一个信封装有一个红球(100美元) 和一个黑球,另外一个信封装有两个黑球
• 你随机选了一个信封并从中随机取出一个球,发现是黑球 • 这时你被告知可以有一次换信封重新取球的机会,你会选
择换还是不换?
信封问题
• 随机变量 ������ ∈ 1,0 , ������ ∈ 红, 黑 • ������ ������ = 1 = ������ ������ = 0 = 1⁄2 • ������ ������ = 红 E = 1 = 1⁄2 , ������ ������ = 红 E = 0 = 0
西瓜分类问题
• 基于西瓜的相关属性预测他们是不是好瓜
������1 ≔ 色泽 ∈ 乌黑, 青绿, 浅白 ������2 ≔ 根蒂 ∈ 蜷缩, 稍蜷, 硬挺 ������3 ≔ 敲声 ∈ 沉闷, 浊响, 清脆 ������4 ≔ 纹理 ∈ 清晰, 稍糊, 模糊 ������5 ≔ 脐部 ∈ 凹陷, 稍凹, 平坦 ������6 ≔ 触感 ∈ 硬滑, 软粘 ������ ≔ 好瓜 ∈ 是, 否
随机场马尔可夫随机场条件随机场

随机场、马尔可夫随机场、条件随机场最近看视觉显著性方面的文章,看到一篇2011年2月的PAMI文章Learning to Detect a Salient Object,论文提出一种基于条件随机场(CRF)的特征组合方法将显著目标提取问题看做二值标记问题来解决。
之前没有接触过条件随机场,经过两天的学习,现在总结一下并巩固梳理:(1)随机场:在概率论中, 由样本空间Ω = {0, 1, ..., G 1}n取样构成的随机变量Xi所组成的S= {X1, ..., Xn}。
若对所有的ω∈Ω下式均成立,则称π为一个随机场。
一些已有的随机场如:马尔可夫随机场(MRF), 吉布斯随机场(GRF), 条件随机场(CRF), 和高斯随机场。
随机场包含两个要素:位置(site),相空间(phase space)。
当给每一个位置中按照某种分布随机赋予相空间的一个值之后,其全体就叫做随机场。
我们不妨拿种地来打个比方。
“位置”好比是一亩亩农田;“相空间”好比是种的各种庄稼。
我们可以给不同的地种上不同的庄稼,这就好比给随机场的每个“位置”,赋予相空间里不同的值。
所以,俗气点说,随机场就是在哪块地里种什么庄稼的事情。
(2)马尔科夫(Markov)性质:马尔可夫链是随机变量X1, … , Xn 的一个数列。
这些变量的范围,即他们所有可能取值的集合,被称为“状态空间”,而Xn 的值则是在时间n 的状态。
如果Xn+1 对于过去状态的条件概率分布仅是Xn 的一个函数,则这里x 为过程中的某个状态。
上面这个恒等式可以被看作是马尔可夫性质。
马尔可夫链的在很多应用中发挥了重要作用,例如,谷歌所使用的网页排序算法(PageRank)就是由马尔可夫链定义的。
通俗说,离当前因素比较遥远(这个遥远要根据具体情况自己定义)的因素对当前因素的性质影响不大。
简单说,就叫健忘。
拿天气来打个比方。
如果我们假定天气是马尔可夫的,其意思就是我们假设今天的天气仅仅与昨天的天气存在概率上的关联,而与前天及前天以前的天气没有关系。
条件随机场
无向图:联合分布的因式分解
势函数部分
13
例:无向图及其势能函数表联合分布
子块:
无向图:联合分ቤተ መጻሕፍቲ ባይዱ的因式分解
14
离散马尔可夫过程 两个假设:无后效性 马尔科夫性 丌动性 状态不时间无关 在隐马尔科夫模型中,我们丌知道模型所经过的 序列状态,叧知道状态的概率函数。 双重的随机过程: 模型的状态转换过程是丌可见的 可观察事件的随机过程是隐蔽的 五元组 P96
条件随机场理论(CRFs)可以用于序列标记、数据分割、组块分析等 自然语言处理任务中。在中文分词、中文人名识别、歧义消解等汉语自 然语言处理任务中都有应用,表现很好。
目前基于 CRFs 的主要系统实现有 CRF,FlexCRF,CRF++ 缺点:训练代价大、复杂度高
2
预备知识 产生式模型和判别式模型(Generative model vs. Discriminative model) 概率图模型 隐马尔科夫模型 最大熵模型
3
假定输入x, 类别标签y
产生式模型(生成模 型)估计联合概率 P(x, y), 因可以根据 联合概率来生成样本 HMMs
机器学习方法的两种分类: 产生式模型和判别式模型
判别式模型(判别模 型)估计条件概率 P(y|x), 因为没有x的 知识,无法生成样本, 叧能判断分类 SVMs CRF MEM(最大熵)
9
无向图
◦ 有限集合V:顶点/节点,表示随机变量 ◦ 集合E:边/弧
两个节点邻接:两个节点之间存在边,记为 X i ~ X j 路径:若对每个i,都有 X i- 1 ~ X i ,则称序列 X1 ,..., X N 为一条路径
条件随机场分割方案

▪ 颜色特征
1.颜色特征是图像分割中最常用的特征之一,可以通过颜色直 方图、颜色矩等方法提取。 2.颜色特征可以描述图像中不同目标区域的颜色分布和差异, 有助于准确区分目标。 3.在条件随机场模型中,可以利用颜色特征作为观测值,提高 分割的准确性。
特征选择与提取
▪ 形状特征
1.形状特征是图像分割中重要的特征之一,可以通过边缘检测、轮廓提取等方法提 取。 2.形状特征可以描述目标区域的轮廓、面积、长宽比等几何信息,有助于准确区分 不同形状的目标。 3.在条件随机场模型中,可以利用形状特征作为观测值,提高分割的准确性。
1.选择适当的数据集进行实验,考虑数据集的多样性、数据清洗、格式转换、图像增强 等操作,以提高模型的泛化能力。
▪ 实验参数设置
1.根据具体实验需求,设置适当的模型参数和训练参数,包括 学习率、迭代次数、批次大小等。 2.通过交叉验证或其他方法,对参数进行调整和优化,以提高 模型的性能。
▪ 模型融合
1.采用模型融合技术,提高模型泛化能力。 2.考虑不同模型之间的互补性和差异性,选择合适的融合方法。 3.对融合模型进行验证和评估,确保模型性能提升。
推断与预测步骤
▪ 不确定性建模
1.考虑模型的不确定性,对预测结果进行置信度评估。 2.采用适当的不确定性建模方法,如贝叶斯推断或蒙特卡洛采 样。 3.结合不确定性建模结果,优化模型决策过程。
特征提取
1.选择合适的特征提取方法,提取有效的特征信息。 2.考虑多尺度和多通道特征,提高模型鲁棒性。 3.对特征进行归一化和标准化处理,避免特征漂移。
推断与预测步骤
▪ 推断策略
1.选择适当的推断策略,如最大后验概率或边际化推断。 2.考虑模型复杂度和计算效率之间的平衡。 3.针对不同的应用场景,选择合适的推断方法。
条件随机场(Conditionalrandomfield,CRF)

条件随机场(Conditionalrandomfield,CRF)本⽂简单整理了以下内容:(⼀)马尔可夫随机场(Markov random field,⽆向图模型)简单回顾(⼆)条件随机场(Conditional random field,CRF)这篇写的⾮常浅,基于 [1] 和 [5] 梳理。
感觉 [1] 的讲解很适合完全不知道什么是CRF的⼈来⼊门。
如果有需要深⼊理解CRF的需求的话,还是应该仔细读⼀下⼏个英⽂的tutorial,⽐如 [4] 。
(⼀)马尔可夫随机场简单回顾概率图模型(Probabilistic graphical model,PGM)是由图表⽰的概率分布。
概率⽆向图模型(Probabilistic undirected graphical model)⼜称马尔可夫随机场(Markov random field),表⽰⼀个联合概率分布,其标准定义为:设有联合概率分布 P(V) 由⽆向图 G=(V, E) 表⽰,图 G 中的节点表⽰随机变量,边表⽰随机变量间的依赖关系。
如果联合概率分布 P(V) 满⾜成对、局部或全局马尔可夫性,就称此联合概率分布为概率⽆向图模型或马尔可夫随机场。
设有⼀组随机变量 Y ,其联合分布为 P(Y) 由⽆向图 G=(V, E) 表⽰。
图 G 的⼀个节点v\in V表⽰⼀个随机变量Y_v,⼀条边e\in E就表⽰两个随机变量间的依赖关系。
1. 成对马尔可夫性(pairwise Markov property)设⽆向图 G 中的任意两个没有边连接的节点 u 、v ,其他所有节点为 O ,成对马尔可夫性指:给定Y_O的条件下,Y_u和Y_v条件独⽴P(Y_u,Y_v|Y_O)=P(Y_u|Y_O)P(Y_v|Y_O)2. 局部马尔可夫性(local)设⽆向图 G 的任⼀节点 v ,W 是与 v 有边相连的所有节点,O 是 v 、W 外的其他所有节点,局部马尔可夫性指:给定Y_W的条件下,Y_v和Y_O条件独⽴P(Y_v,Y_O|Y_W)=P(Y_v|Y_W)P(Y_O|Y_W)当P(Y_O|Y_W)>0时,等价于P(Y_v|Y_W)=P(Y_v|Y_W,Y_O)如果把等式两边的条件⾥的Y_W遮住,P(Y_v)=P(Y_v|Y_O)这个式⼦表⽰Y_v和Y_O独⽴,进⽽可以理解这个等式为给定条件Y_W下的独⽴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
条件随机场的概率计算问题
• 前向-后向算法: • 同样,对每个指标i=0,1,…,n+1 , 定义后向向量
• 又可表示为: • 即表示在位置i的标记是yi,且从位置i+1到n的后部
分标记序列的非规范化概率 • 前向-后向得:
条件随机场的概率计算问题
• 条件随机场模型学习的改进的迭代尺度法:
条件随机场的学习算法
• 条件随机场模型学习的改进的迭代尺度法:
条件随机场的学习算法
• T(x,y) 表示数据(x,y)中的特征总数,对不同的数据 (x,y)取值可能布同,定义松弛特征:
• S为大的常数,使得对训练数据集所有(x,y)
条件随机场的学习算法
条件随机场的简化形式
• 注意到条件随机场中同一特征在各个位置都有定义,可以对同一 个特征在各个位置求和,将局部特征函数转化为一个全局特征函 数,这样就可以将条件随机场写成权值向量和特征向量的内积形 式,即条件随机场的简化形式。
• 首先将转移特征和状态特征及其权值用统一的符号表示,设有k1 个转移特征,k2个状态特征,K=k1+k2,记
• 对观测序列x的每一个位置i=1,2,..n+1,定义一个m阶矩阵(m是标 记Yi取值的个数)
条件随机场的矩阵形式
• 给定观测序列x,标记序列y的非规范化概率可以通过n+l个矩阵的 乘积表示:
• 条件概率Pw(y|x):
• Zw(x)为规范化因子,是n+1个矩阵的乘积的(start, stop)元素
• 解: 首先计算从start到stop对应与y=(1,1,1), y=(1,1,2),..y=(2,2,2)各路径的非规范化概率分别是:
• 求规范化因子,通过计算矩阵乘积,第1行第1列 的元素为:
• 恰好等于从start到stop的所有路径的非规范化概率 之和,及规范化因子。
条件随机场的概率计算问题
的输出标记序列或状态序列.
条件随机场的参数化形式 • 定理: • (线性链条件随机场的参数化形式):设P(Y|X)为线性链条 件随机场,则在随机变量X取值为x的条件下,随机变量Y 取值为y的条件概率具有如下形式:
• 其中:
• 当tk 前定位义置在,边上的特征函数,转移特征,依赖于前一个和 • 置sl 定义在结点上的特征函数,状态特征,依赖于当前位
• 如果联合概率分布P(Y)满足成对、局部或全局马尔可夫性, 就称此联合概率分布为概率无向图模型(probability undirected graphical model),或马尔可夫随机场(Markov random field).
• 问题关键:求联合概率,引申为对联合概率进行因子分 解。
概率无向图模型的因子分解
• 条件随机场的概率计算问题
• 给定条件随机场P(Y|X),输入序列x和输出序列y, • 计算条件概率: • 以及相应的数学期望问题。
• 引进前向-后向向量,递归计算。
条件随机场的概率计算问题
• 前向-后向算法: • 对每个指标i=0,1,…,n+1 , 定义前向向量
• 递推公式:
• 又可表示为: • 即表示在位置i的标记是yi,且到位置i的前部分标
条件随机场的定义与形式
• 线性链情况:
• 最大团是相邻两个结点的集合, 线性链条件随机场:
条件随机场的定义与形式
• 定义(线性链条件随机场)
•设
均为线性链表示的
随机变量序列,若在给定随机变量序列X的条件下,
随机变量序列Y的条件概率分布P(Y|X)构成条件随
机场。即满足马尔可夫性
• 则称P(Y |X)为线性链条件随机场。 • 在标注问题中,X表示输入观测序列,Y表示对应
条件随机场的学习算法
• 拟牛顿法:
• 学习的优化目标函数: • 梯度函数:
条件随机场的学习算法
• 条件随机场模型学习的BFGS算法
条件随机场的学习算法
• 条件随机场模型学习的BFGS算法
条件随机场的预测算法
• 预测算法: • 给定条件随机场P(Y|X)和输入序列(观测序列)x, • 求:条件概率最大的输出序列(标记序列)y*, • 维特比算法: • 由:
(Factorization).
• 给定概率无向图模型,设其无向图为G,C为G上的最大团,Yc表
示C对应的随机变量,那么概率无向图模型的联合概率分布P(Y)可
写作图中所有最大团C上的函数
的乘积形式,即
• Z是规范化因子(normalization factor)
概率无向图模型的因子分解
• 势函数:
•在
时,等价于
模型定义
• 全局马尔可夫性(Global Markov property)
• 结点集合A, B是在无向图G中被结点集合C分开的任意结点集合,
模型定义
• 概率无向图模型:
• 设有联合概率分布P(Y),由无向图G=(V, E)表示,在图G中, 结点表示随机变量,边表示随机变量之间的依赖关系,
条件随机场的定义与形式
• 条件随机场:
• 设X与Y是随机变量,P(Y|X)是在给定X的条件下Y的条件概 率分布,若随机变量Y构成一个由无向图G=(V,E)表示的马 尔可夫随机场,即满足马尔科夫性
• 对任意结点v成立,则称条件概率分布P(Y|X)为条件随机 场,式中w~v表示在图G=(V,E)中与结点v有边连接的所有 结点w,w≠v表示结点v以外的所有结点。
• 线性链条件随机场(linear chain conditional random field ) • 线性链条件随机场可以用于标注等问题; • 在条件概率模型P(Y|X)中,Y是输出变量,表示标记序列,X是输入变量,
表示需要标注的观测序列,也把标记序列称为状态序列。
条件随机场的定义与形式
• 条件随机场(conditional random field)三个主要问题: • 概率计算 • 模型学习 • 推测状态
条件随机场的矩阵形式
• 例:线性链条件随机场,观测序列x,状态序列y, i=1,2,3 n=3, 标记yi属于{1,2},假设 yo=start=1, y4=stop=1,各个位置的随机矩阵:
试求状态序列y以start为起点stop为终点所有路径的 非规范化概率及规范化因子。
条件随机场的矩阵形式
• 定理11.1 (Hammersley-Clifford定理):概率无向图模型的联合概率 分布P(Y)可以表示为如下形式:
条件随机场的定义与形式
• 条件随机场(conditional random field)的定义:
• 给定随机变量X条件下,随机变量Y的马尔可夫随机场。
• 定义在线性链上的特殊的条件随机场:
• 定义:团、最大团 • 无向图G中任何两个结点均有边连接的结点子集称为团(clique)。 • 若C是无向图G的一个团,井且不能再加进任何一个c的结点使其
成为一个更大的团,则称此C为最大团(maximal clique).
• 两个结点的团 ? • 三个结点的团 ?
概率无向图模型的因子分解
• 将概率无向图模型的联合概率分布表示为其最大团上的随机变量 的函数的乘积形式的操作,称为概率无向图模型的因子分解
• CRF:选择上下文相关特性;不在每一个节点进行归一化, 而是所有特征进行全局归一化,可以求得全局的最优值。
概率无向图模型
• 概念:
• 概率无向图模型(probabilistic undirected graphical model) • 马尔可夫随机场(Markov random field) • 可以由无向图表示的联合概率分布。
• 改进的迭代尺度法: • 不断优化对数似然函数改变量的下界: • 假设模型当前参数向量: • 向量增量: • 更新向量: • 关于转移特征tk的更新方程:
条件随机场的学习算法
• 改进的迭代尺度法: • 关于转移特征sl的更新方程:
• T(x,y)是在数据(x,y)中出现所有特征数的总和
条件随机场的学习算法
• 概率计算 • 按照前向-后向向量的定义, • 可计算标记序列在位置i是标记yi的条件概率 • 和在位置i-1与i是标记yi-1和yi的条件概率:
• 其中:
条件随机场的概率计算问题
• 期望值的计算 • 利用前向-后向向量,可以计算特征函数关于联合
分布P(X,Y)和条件分布P(Y|X)的数学期望。 • 特征函数f k关于条件分布P(Y|X)的数学期望是:
条件随机场的参数化形式
• 例:标准问题,输入观测为:X=(X1,X2,X3), 输出标记为 Y=(Y1,Y2,Y3), Y1,Y2,Y3 取值于{1,2}
• 假设特征和对应权值,只注明特征取值为1,为0省略
条件随机场的参数化形式
• 对给定的观测序列x,标记序列Y=(1, 2, 2)的非规范化条件概率为
模型定义
• Graph
• Node
• Edge • v, 集合V • e,集合E • G=(V,E) • 结点v,随机变量Yv;边e,随机变量间的概率依赖关系 • 概率图模型(Probabilistic graphical model): 用图表示的概
率分布。
模型定义
• 定义:
• 给定一个联合概率分布P(Y)和表示它的无向图G,
• 设u和v是无向图G中任意两个没有边连接的结点,结点u和v分别对应随机 变量Yu和Yv,
• 其他所有结点为O,对应的随机变量组是Y0 • 给定随机变量组Y0的条件下随机变量Yu和Yv是条件独立的
模型定义
• 局部马尔可夫性( Local Markov properly)
• v 任意结点 • W与v有边相连 • O 其它
• 对于转移特征: 的更新方程为: