基于STM32的机器人仿真示教器设计
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断发展,智能家居已成为现代生活的重要组成部分。
扫地机器人作为智能家居领域中的一员,以其便捷、高效、智能的特点受到了广泛关注。
本文将详细介绍基于STM32的扫地机器人的设计与实现过程,包括硬件设计、软件设计、系统实现以及测试与优化等方面。
二、硬件设计1. 微控制器:选用STM32系列微控制器,具有高性能、低功耗的特点,满足扫地机器人对控制系统的要求。
2. 电机与驱动:扫地机器人采用直流电机,配合电机驱动模块,实现机器人的运动控制。
3. 传感器:包括红外线测距传感器、超声波测距传感器、碰撞传感器等,用于实现机器人的避障、定位等功能。
4. 电源模块:采用可充电锂电池,为扫地机器人提供稳定的电源。
5. 其他硬件:包括电源开关、充电接口、LED指示灯等辅助模块。
三、软件设计1. 操作系统:采用实时操作系统(RTOS),实现多任务调度,提高系统响应速度和稳定性。
2. 算法设计:包括路径规划算法、避障算法、清洁模式算法等,实现扫地机器人的智能控制。
3. 通信协议:设计扫地机器人与上位机通信的协议,实现远程控制、状态反馈等功能。
4. 软件架构:采用模块化设计,将软件分为多个功能模块,便于后期维护和升级。
四、系统实现1. 路径规划:扫地机器人采用激光雷达或视觉传感器进行环境感知,通过路径规划算法生成清洁路径。
2. 避障功能:通过红外线测距传感器和超声波测距传感器检测障碍物,实现避障功能。
3. 清洁模式:扫地机器人可设置多种清洁模式,如自动模式、沿边模式、重点清洁模式等,以满足不同需求。
4. 远程控制:通过上位机与扫地机器人通信,实现远程控制功能。
5. 状态反馈:扫地机器人通过LED指示灯和上位机界面反馈工作状态和电量等信息。
五、测试与优化1. 测试:对扫地机器人进行功能测试、性能测试和稳定性测试,确保各项功能正常工作。
2. 优化:根据测试结果对算法和硬件进行优化,提高扫地机器人的工作效率和清洁效果。
基于STM32的家庭服务机器人系统设计
基于STM32的家庭服务机器人系统设计家庭服务机器人是一种能够为家庭提供多样化服务的智能机器人。
基于STM32的家庭服务机器人系统设计是通过使用STM32微控制器来控制机器人的功能和行为。
该系统设计主要包括硬件设计和软件设计两个部分。
硬件设计:1.外壳设计:根据实际需要,设计一个坚固、美观的外壳,以保护机器人的内部电路和组件。
2.电源设计:选用适当的电源模块,以提供机器人所需的电力,并确保电源输入的稳定性。
3.传感器:通过使用各种传感器,如红外线传感器、声音传感器和图像传感器等,以获取周围环境的信息。
4.电机和驱动器:安装适当的电机和驱动器,以控制机器人的运动和姿态。
5.显示器和音响:装配合适的显示器和音响,以提供机器人和用户之间的交互界面。
6.通信模块:集成适当的通信模块,如Wi-Fi或蓝牙模块,以实现机器人与其他设备的通信。
软件设计:1.系统运行:首先需要编写机器人的控制程序,以确保机器人的运行和行为符合设计要求。
2.感知与导航:使用传感器数据来定位并建立机器人的内部地图,从而实现机器人的感知和自主导航功能。
3.语音和图像处理:使用语音识别和图像处理算法,使机器人能够理解人类的语言和识别人脸、物体等图像信息。
4.任务执行:根据用户的需求和指令,编写机器人执行各种任务的程序,如打扫、煮饭、看护等。
5.用户界面:设计易于操作和友好的用户界面,使用户能够与机器人进行交互,并向机器人提供指令和反馈。
6.智能学习:利用机器学习算法,不断提高机器人的学习能力和智能水平,使其能够根据用户的习惯和反馈进行自主学习和优化。
总结起来,基于STM32的家庭服务机器人系统设计包括硬件设计和软件设计两个部分,通过适当的硬件模块和程序编写,实现机器人的感知、导航、语音识别、图像处理和任务执行等功能,提供多样化的家庭服务。
同时,通过不断的学习和优化,使机器人能够更好地适应用户的需求,为家庭提供更为便捷和智能化的服务。
基于STM32F407的双足机器人
基于STM32F407的双足机器人双足机器人是一种模仿人类步行方式的机器人,它的动作更加灵活自然,能够适应各种复杂的环境和地形。
在现代科技的发展下,双足机器人已经被广泛应用于教育、娱乐和工业等领域。
而基于STM32F407的双足机器人则是一种新型的机器人,它利用STM32F407单片机搭建控制系统,具有高性能和低功耗的特点,成为了双足机器人中的一个重要组成部分。
一、STM32F407STM32F407是意法半导体公司推出的一款高性能ARM Cortex-M4内核的微控制器,具有丰富的外设和强大的性能优势。
它集成了丰富的外设,包括ADC、DAC、PWM、USART、I2C、SPI、CAN等,适用于各种复杂的应用场景。
STM32F407还具有低功耗和高性能的特点,能够满足双足机器人对于控制系统的要求。
基于STM32F407的双足机器人控制系统由STM32F407单片机、电机驱动器、传感器模块、姿态估计算法等组成。
STM32F407单片机作为控制核心,负责控制双足机器人的动作、平衡和姿态调整等功能。
电机驱动器则用于控制双足机器人的步态和速度,传感器模块用于感知周围环境,姿态估计算法用于实时估计双足机器人的姿态和状态。
1. 高性能:基于STM32F407的双足机器人具有较高的性能优势,能够实现复杂的控制算法和运动规划,从而实现更加灵活和稳定的步行动作。
2. 低功耗:STM32F407单片机具有低功耗的特点,能够为双足机器人提供可靠的电力支持,从而延长机器人的工作时间。
3. 灵活性:基于STM32F407的双足机器人具有较高的灵活性和可扩展性,能够根据不同的应用场景进行自由组合和调整,从而适应不同的任务需求。
1. 教育领域:基于STM32F407的双足机器人可以作为教育工具,用于教学生学习机器人控制和运动规划等知识,激发学生对科学和技术的兴趣。
2. 娱乐领域:基于STM32F407的双足机器人可以作为娱乐机器人,进行各种有趣的动作表演和互动,提供新颖的娱乐体验。
基于STM32的四足仿生机器人控制系统设计与实现
基于STM32的四足仿生机器人控制系统设计与实现近年来,随着科技的不断发展,机器人技术也得到了极大的进展。
四足仿生机器人作为一种模拟动物四肢运动方式的机器人,具有较高的机动性和适应性。
本文将介绍基于STM32的四足仿生机器人控制系统的设计与实现。
1. 引言随着社会对机器人技术需求的增加,仿生机器人的研究也变得越来越重要。
四足仿生机器人可以模拟真实动物四肢的运动方式,具备较大的运动自由度和稳定性。
其中,控制系统是四足仿生机器人实现各种功能和动作的核心。
2. 系统设计基于STM32的四足仿生机器人控制系统主要包括硬件设计和软件设计两部分。
2.1 硬件设计在硬件设计方面,需要选择合适的传感器、执行器和控制器。
传感器常用于感知环境信息,可以选择激光传感器、压力传感器和陀螺仪等。
执行器常用于驱动机器人的运动,可以选择直流电机或伺服电机。
控制器负责处理各种传感器和执行器的数据和信号,最常用的是基于STM32的微控制器。
2.2 软件设计在软件设计方面,需要编写嵌入式程序来实现机器人的各种功能和动作。
可以使用C语言或嵌入式汇编语言来编写程序。
程序需要实时处理传感器数据,控制执行器的运动,同时保证系统的稳定性和安全性。
3. 实现步骤在实现基于STM32的四足仿生机器人控制系统时,可以按照以下步骤进行:3.1 传感器数据获取通过传感器获取环境信息,并将数据传输给控制器进行处理。
可以使用SPI或I2C等通信协议进行数据传输。
3.2 运动规划根据传感器数据分析,确定机器人的运动规划。
例如,判断机器人所处环境是否有障碍物,确定机器人的步态等。
3.3 控制算法设计基于运动规划结果,设计合适的控制算法。
其中包括反馈控制、PID控制等。
控制算法需要保证机器人的稳定性和动作的准确性。
3.4 执行器控制根据控制算法计算出的控制信号,控制执行器的运动。
根据机器人的步态和动作需求,驱动各个关节实现运动。
3.5 系统优化与调试对控制系统进行优化和调试,保证系统的稳定性和性能良好。
基于STM32F407的双足机器人
基于STM32F407的双足机器人双足机器人是一种模拟人类行走的机器人,可以实现步行、跑步、跳跃等动作。
本文将介绍基于STM32F407的双足机器人的设计原理和实现过程。
我们需要设计机器人的硬件部分。
双足机器人需要具备平衡能力和步行能力。
为了实现这一目标,我们需要在两条腿上安装舵机和传感器。
舵机可以控制腿部的运动,传感器可以检测机器人的倾斜角度和腿部的位置。
基于STM32F407的双足机器人主控制器需要具备较强的计算能力和控制能力。
STM32F407是一款高性能的ARM Cortex-M4微控制器,具有高速的运算能力和多种外设接口。
我们可以将STM32F407作为机器人的主控制器。
接下来,我们需要设计机器人的软件部分。
双足机器人的软件主要包括运动控制算法和姿态控制算法。
运动控制算法用于控制舵机的转动角度,从而实现机器人的步行动作。
姿态控制算法用于保持机器人的平衡,根据传感器的测量值进行控制。
在编程上,我们可以使用Keil MDK进行开发。
Keil MDK是一款功能强大的集成开发环境,可以进行嵌入式软件的开发和调试。
我们可以使用C/C++语言编写机器人的软件,利用STM32F407的外设库函数进行控制。
我们需要对机器人进行测试和调试。
在测试阶段,我们可以通过连接电脑和机器人,通过串口通信进行调试。
我们还可以使用仿真软件进行虚拟测试,以提前检测和解决潜在的问题。
基于STM32F407的双足机器人可以应用于多个领域,例如教育、娱乐和服务机器人等。
通过不断改进和优化,双足机器人的性能和功能将得到进一步提升,为人们带来更多便利和乐趣。
基于STM32F407的双足机器人是一种具有广泛应用前景的机器人系统。
它结合了硬件设计和软件算法,能够实现人类步行动作,并具备平衡能力。
这为机器人技术的发展和应用带来了更多可能性。
基于stm32的人形机器人制作
摘要:变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。
本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。
基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。
本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。
我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。
本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录第一章方案设计 (6)1 机械结构方案设计 (6)2 驱动方案选择 (7)2.1 电机的选择 (7)3 传感器的选择 (7)4 结构的合理性和参数的合理性 (8)第二章动作的总体规划详细方案 (9)1 人形态下的行走设计 (9)2 车形态下的运动设计 (9)3 人车转换的变形设计 (9)第三章软件系统设计 (10)1 软件系统总体方案 (10)2 控制方案与流程 (11)第四章程序 (12)第五章项目心得 (14)第一章方案设计1机械结构方案设计本次任务主要对我们的机电一体化产品-变形金刚机器人进行了系统设计,实现自动变形。
外部机械结构包括作为战车整体外观的躯壳和车顶,用于连接躯壳以及车顶的支架,与支架连接组成战车车头的两个车头灯以及引擎盖,与支架上端连接的头部,与支架中部连接的两条手臂以及与支架下端连接的两条腿,安装于二条手臂上的前轮以及安装于二条腿上的后轮。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是仿生型机器人的一种,与人类步态较为接近,因此在人机交互、服务机器人、医疗等领域有广泛应用。
本文介绍了基于STM32F407的双足机器人设计。
一、硬件设计1. 硬件原理图整个系统由主控板、电机驱动板、按键板、电量显示板、调试串口板、电源板等组成,如下图所示。
2. 材料清单双足机器人的材料清单主要包括:• 主控芯片:STM32F407• 电机驱动芯片:L298N• 步进电机:NEMA 17• 电源:12V、5A• 机壳:3D打印1. 系统框架整个系统采用嵌入式操作系统RTOS实现,用户可以通过触摸屏或按键操作控制双足机器人的移动、转向等动作。
2. 程序流程程序流程图如下图所示。
3. 关键算法(1)PID控制算法采用PID控制算法控制步进电机的转速,保证双足机器人移动的稳定性和平滑性。
(2)三关节反向解算算法该算法用于计算双足机器人每个关节的角度,使之达到期望角度,从而实现机器人的运动。
(3)Kinect传感器数据处理算法通过Kinect传感器获取地面深度数据,根据机器人的移动数据、机构参数、重心位置等计算机器人的倾角、速度等数据,从而实现双足机器人的平衡控制。
三、实验结果经实验,基于STM32F407的双足机器人控制系统工作稳定,运动平滑,靠墙时能自动保持平衡,转向时稳定性高,可靠性强。
四、结论本设计基于STM32F407的双足机器人控制系统,实现了双足机器人的运动控制。
通过Kinect传感器获取地面深度数据,根据机器人的移动参数计算机器人的倾角、运动速度等,从而实现机器人的平衡控制。
该设计为双足机器人系统提供了一个较为稳定、高可靠性的控制平台,并为双足机器人的应用提供了有力支持。
基于STM32的示教型送餐机器人的设计
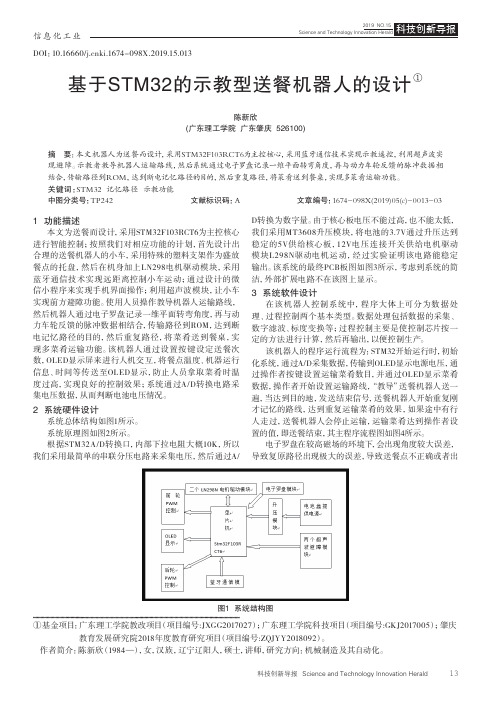
信息化工业科技创新导报 Science and Technology Innovation Herald13DOI:10.16660/ki.1674-098X.2019.15.013基于STM32的示教型送餐机器人的设计①陈新欣(广东理工学院 广东肇庆 526100)摘 要:本文机器人为送餐而设计,采用STM32F103RCT6为主控核心,采用蓝牙通信技术实现示教遥控,利用超声波实现避障。
示教者教导机器人运输路线,然后系统通过电子罗盘记录一维平面转弯角度,再与动力车轮反馈的脉冲数据相结合,传输路径到ROM,达到断电记忆路径的目的,然后重复路径,将菜肴送到餐桌,实现多菜肴运输功能。
关键词:STM32 记忆路径 示教功能中图分类号:TP242 文献标识码:A 文章编号:1674-098X(2019)05(c)-0013-03①基金项目:广东理工学院教改项目(项目编号:JXGG2017027);广东理工学院科技项目(项目编号:GKJ2017005);肇庆 教育发展研究院2018年度教育研究项目(项目编号:ZQJYY2018092)。
作者简介:陈新欣(1984—),女,汉族,辽宁辽阳人,硕士,讲师,研究方向:机械制造及其自动化。
1 功能描述本文为送餐而设计,采用STM32F103RCT6为主控核心进行智能控制;按照我们对相应功能的计划,首先设计出合理的送餐机器人的小车,采用特殊的塑料支架作为盛放餐点的托盘,然后在机身加上LN298电机驱动模块,采用蓝牙通信技术实现远距离控制小车运动;通过设计的微信小程序来实现手机界面操作;利用超声波模块,让小车实现前方避障功能。
使用人员操作教导机器人运输路线,然后机器人通过电子罗盘记录一维平面转弯角度,再与动力车轮反馈的脉冲数据相结合,传输路径到ROM,达到断电记忆路径的目的,然后重复路径,将菜肴送到餐桌,实现多菜肴运输功能。
该机器人通过设置按键设定送餐次数,OLED显示屏来进行人机交互,将餐点温度、机器运行信息、时间等传送至OLED显示,防止人员拿取菜肴时温度过高,实现良好的控制效果;系统通过A/D转换电路采集电压数据,从而判断电池电压情况。
一种基于STM32的人形机器人设计
link appraisement
柳加文 孔令彩 吴雪涛
胡泽展 黄海平 朱娟花(通讯作者)河南农业大学机电工程学院
(此项目由河南农业大学大学生创新创业训练项目资助)
图1 舵机分配图图2 舵机控制电路
研究中遇到的问题及解决方法
在实验中遇到很多问题,经过摸索都很好地解决了,比如:自平衡机器人依靠摩擦力来移动,路面的凹凸状况、摩
擦力大小都会影响机器人的行动,导致行走不稳。
这时可以适当给机器人负重,并在脚下增加塑料垫来增大摩擦力,能在一定程°上矫正其移动。
另外,机器人前进或后退时,由
于两脚移动的距离、速°或方向会有微小差异,会导致机器人不能完全按直线行动,可以在机器人另一侧的脚上增加一定重量。
在软硬件的配合下,最终实现了机器人的前进、后退、右侧滑、挥手、鞠躬、配乐跳舞等动作。
STM32的人形机器人设计,包括路串行舵机机器人动作的实现和采用STM32控制24路舵机控制板的方法。
该操作系统利用LORA 通讯模块接收来自遥控器的指令并转换成机器指令发送给机器人舵机,对实现人形机器人不同动作的完成。
图6 线上调整
图5 预处理接线图图4 arduino 操作界面。
基于STM32F4的模拟工业机器人示教系统的设计与实现
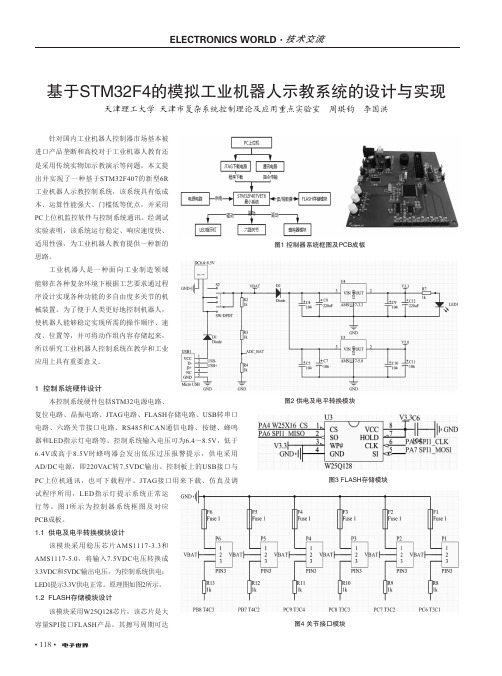
• 118•基于STM32F4的模拟工业机器人示教系统的设计与实现天津理工大学 天津市复杂系统控制理论及应用重点实验室 周琪钧 李国洪图1 控制器系统框图及PCB成板针对国内工业机器人控制器市场基本被进口产品垄断和高校对于工业机器人教育还是采用传统实物加示教演示等问题,本文提出并实现了一种基于STM32F407的新型6R 工业机器人示教控制系统,该系统具有低成本、运算性能强大、门槛低等优点,并采用PC 上位机监控软件与控制系统通讯。
经调试实验表明,该系统运行稳定、响应速度快、适用性强,为工业机器人教育提供一种新的思路。
工业机器人是一种面向工业制造领域能够在各种复杂环境下根据工艺要求通过程序设计实现各种功能的多自由度多关节的机械装置。
为了便于人类更好地控制机器人,使机器人能够稳定实现所需的操作顺序、速度、位置等,并可将动作组内容存储起来,所以研究工业机器人控制系统在教学和工业应用上具有重要意义。
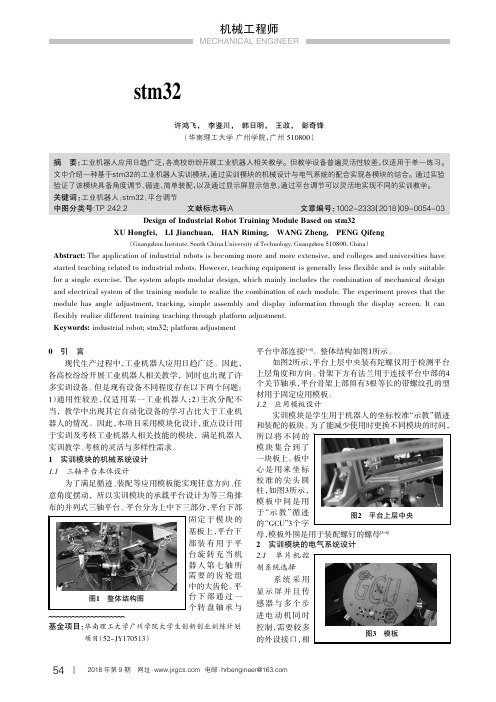
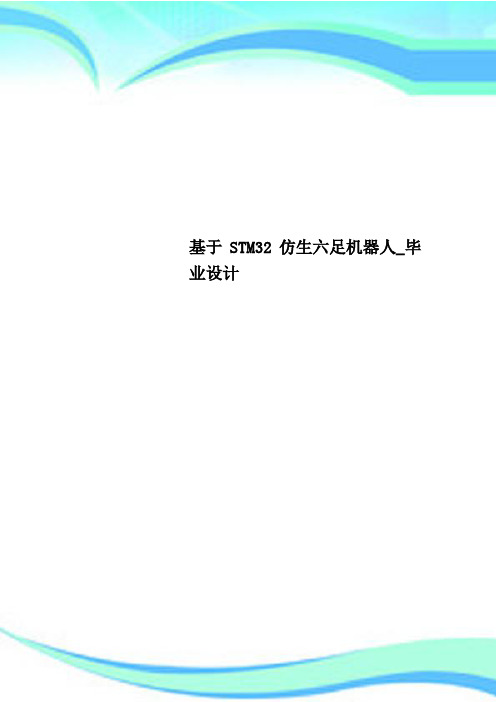
1 控制系统硬件设计本控制系统硬件包括STM32电源电路、图2 供电及电平转换模块复位电路、晶振电路、JTAG 电路、FLASH 存储电路、USB 转串口电路、六路关节接口电路、RS485和CAN 通信电路、按键、蜂鸣器和LED 指示灯电路等。
控制系统输入电压可为6.4~8.5V ,低于6.4V 或高于8.5V 时蜂鸣器会发出低压过压报警提示,供电采用AD/DC 电源,即220VAC 转7.5VDC 输出。
控制板上的USB 接口与PC 上位机通讯,也可下载程序。
JTAG接口用来下载、仿真及调试程序所用,LED 指示灯提示系统正常运行等。
图1所示为控制器系统框图及对应PCB 成板。
1.1 供电及电平转换模块设计该模块采用稳压芯片AMS1117-3.3和AMS1117-5.0,将输入7.5VDC 电压转换成3.3VDC 和5VDC 输出电压,为控制系统供电;LED1提示3.3V 供电正常。
原理图如图2所示。
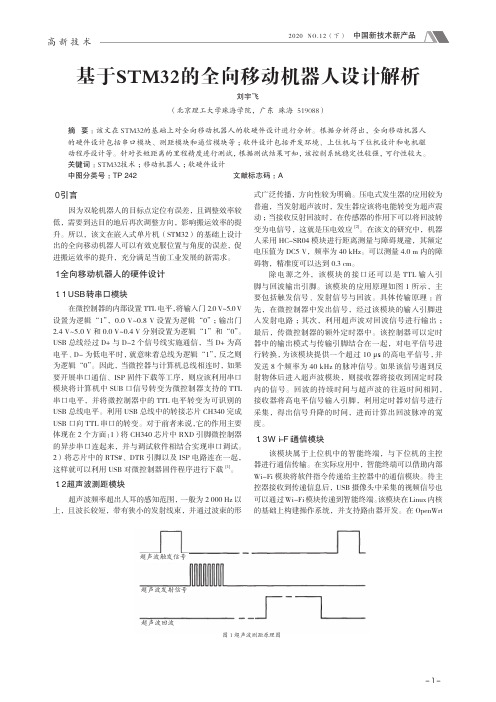
1.2 FLASH存储模块设计该模块采用W25Q128芯片,该芯片是大容量SPI 接口FLASH产品,其擦写周期可达图3 FLASH存储模块图4 关节接口模块• 119•10万次,容量为128Mb (16M 字节)。
基于stm32的工业机器人实训模块设计
基于stm32的工业机器人实训模块设计许鸿飞,李鉴川,韩日明,王政,彭奇锋(华南理工大学广州学院,广州510800)摘要:工业机器人应用日趋广泛,各高校纷纷开展工业机器人相关教学。
但教学设备普遍灵活性较差,仅适用于单一练习。
文中介绍一种基于stm32的工业机器人实训模块,通过实训模块的机械设计与电气系统的配合实现各模块的结合。
通过实验验证了该模块具备角度调节、循迹、简单装配,以及通过显示屏显示信息,通过平台调节可以灵活地实现不同的实训教学。
关键词:工业机器人;stm32;平台调节中图分类号:TP242.2文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员8)09原园054原园3 Design of Industrial Robot Training Module Based on stm32XU Hongfei,LI Jianchuan,HAN Riming,WANG Zheng,PENG Qifeng(Guangzhou Institute,South China University of Technology,Guangzhou510800,China)Abstract:The application of industrial robots is becoming more and more extensive,and colleges and universities have started teaching related to industrial robots.However,teaching equipment is generally less flexible and is only suitable for a single exercise.The system adopts modular design,which mainly includes the combination of mechanical design and electrical system of the training module to realize the combination of each module.The experiment proves that the module has angle adjustment,tracking,simple assembly and display information through the display screen.It can flexibly realize different training teaching through platform adjustment.Keywords:industrial robot;stm32;platform adjustment0引言现代生产过程中,工业机器人应用日趋广泛。
基于STM32双臂魔方机器人的设计

基于STM32双臂魔方机器人的设计双臂魔方机器人是一种用来解魔方的机器人,它基于STM32芯片进行设计和控制。
下面将详细介绍该机器人的设计过程。
首先,双臂魔方机器人的主要硬件部分包括两个机械臂、魔方识别模块、机械臂控制模块和电源模块。
机械臂由电机、舵机和传感器组成,用于实现抓取魔方和旋转魔方的动作。
魔方识别模块使用摄像头和图像处理算法来识别魔方的状态和颜色。
机械臂控制模块通过STM32芯片来控制机械臂的运动,包括抓取、旋转和放置魔方。
电源模块为机器人提供电能供应。
在软件方面,首先需要进行图像处理和识别算法的编写。
使用OpenCV库可以对魔方的图像进行处理,提取各个小块的颜色信息。
然后,使用颜色信息来识别魔方的状态,并生成解决魔方的步骤。
在生成解决步骤后,可以将步骤转化为机械臂的指令,以便机械臂完成相应的动作。
通过STM32芯片和相关编程,可以实现机械臂的控制。
另外,为了方便操作和控制双臂魔方机器人,可以设计一个人机交互界面。
该界面可以通过显示屏和按钮进行控制操作,显示魔方状态和解决步骤。
界面也可以与机械臂控制模块通过串口通信来实现命令的传输和控制。
在进行实际设计和制作时,需要注意以下几点。
首先,机械臂的设计需要考虑力学性能和稳定性,以确保机械臂能够准确地抓取和旋转魔方。
其次,魔方识别模块需要进行图像处理算法和颜色信息的提取,以保证识别的准确性。
另外,机械臂控制模块和STM32芯片的编程也需要进行充分测试和验证,确保机械臂能够按照生成的解决步骤来完成动作。
总之,双臂魔方机器人的设计基于STM32芯片,通过图像处理和识别算法来实现魔方的识别和解决。
机械臂通过STM32芯片进行控制,实现抓取和旋转魔方的动作。
此外,设计还包括一个人机交互界面,便于操作和控制机器人。
在实际设计和制作过程中,需要注意硬件和软件的相互配合,以确保机器人的稳定性和可靠性。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,它具有类似人类双足行走的能力,可以在复杂的地形环境中自主行走、保持平衡。
随着科技的不断发展,双足机器人在工业生产、救灾救援、服务业等领域有着广泛的应用前景。
本文将介绍基于STM32F407的双足机器人的设计与制作过程。
一、STM32F407介绍STM32F407是意法半导体公司推出的一款32位高性能微控制器,它采用ARM Cortex-M4内核,主频可达168MHz,具有丰富的外设资源和强大的计算能力。
STM32F407具有丰富的接口,如通用并行接口(GPI)、通用同步/异步串行接口USART)、通用串行接口GUS)、SPI、I²C、SDIO、ADC等,可以满足双足机器人在控制、通信、传感器等方面的需求。
二、双足机器人的设计思路双足机器人的设计思路是模仿人类行走的方式,通过不断调整身体姿态和腿部关节的运动来保持平衡。
在双足机器人的设计中,需要考虑机械结构、动力系统、传感系统和控制系统等多个方面。
在本设计中,我们采用STM32F407作为控制核心,利用其丰富的接口资源和强大的计算能力,配合相关模块和传感器,完成双足机器人的设计与制作。
三、双足机器人的硬件设计1. 机械结构设计双足机器人的机械结构设计是整个项目的基础,它直接影响机器人的稳定性和可行性。
我们采用了轻质材料制作机械结构,并通过CAD软件进行设计,确保结构的合理性和稳定性。
2. 动力系统设计双足机器人的动力系统设计包括电机、电机驱动器、电源系统等部分。
我们选用了高效的直流无刷电机作为动力源,并配合合适的电机驱动器和电源系统,保证机器人的稳定性和运动性能。
3. 传感系统设计双足机器人的传感系统设计包括姿态传感器、接触传感器、视觉传感器等部分。
在本设计中,我们利用了三轴加速度计和陀螺仪传感器来获取机器人的姿态信息,利用触摸传感器来检测机器人的接触状态,同时结合视觉传感器进行环境感知和障碍物识别。
基于STM32的全向移动机器人设计解析
- 1 -高 新 技 术0 引言因为双轮机器人的目标点定位有误差,且调整效率较低,需要到达目的地后再次调整方向,影响搬运效率的提升。
所以,该文在嵌入式单片机(STM32)的基础上设计出的全向移动机器人可以有效克服位置与角度的误差,促进搬运效率的提升,充分满足当前工业发展的新需求。
1 全向移动机器人的硬件设计1.1 USB转串口模块在微控制器的内部设置TTL 电平,将输入门2.0 V~5.0 V 设置为逻辑“1”,0.0 V~0.8 V 设置为逻辑“0”;输出门2.4 V~5.0 V 和0.0 V~0.4 V 分别设置为逻辑“1”和“0”。
USB 总线经过D+与D-2个信号线实施通信,当D+为高电平、D-为低电平时,就意味着总线为逻辑“1”,反之则为逻辑“0”。
因此,当微控器与计算机总线相连时,如果要开展串口通信、ISP 固件下载等工序,则应该利用串口模块将计算机中SUB 口信号转变为微控制器支持的TTL 串口电平,并将微控制器中的TTL 电平转变为可识别的USB 总线电平。
利用USB 总线中的转接芯片CH340完成USB 口向TTL 串口的转变。
对于前者来说,它的作用主要体现在2个方面:1)将CH340芯片中RXD 引脚微控制器的异步串口连起来,并与调试软件相结合实现串口调试。
2)将芯片中的RTS#、DTR 引脚以及ISP 电路连在一起,这样就可以利用USB 对微控制器固件程序进行下载[1]。
1.2 超声波测距模块超声波频率超出人耳的感知范围,一般为2 000 Hz 以上,且波长较短,带有狭小的发射线束,并通过波束的形式广泛传播,方向性较为明确。
压电式发生器的应用较为普遍,当发射超声波时,发生器应该将电能转变为超声震动;当接收反射回波时,在传感器的作用下可以将回波转变为电信号,这就是压电效应[2]。
在该文的研究中,机器人采用HC-SR04模块进行距离测量与障碍规避,其额定电压值为DC5 V,频率为40 kHz。
基于STM32仿生六足机器人_毕业设计
基于STM32仿生六足机器人_毕业设计毕业设计(论文) 基于STM32仿生六足机器人学院:电子与信息工程学院专业: XXXXXXXXXXXXXXXX学号: XXXXXXXXXXX作者: XXX指导老师: XXX基于STM32仿生六足机器人电子与信息工程学院 XXXXXXXXXXXX专业作者 XXX 指导教师 XXX【摘要】在科技高速发展的信息社会,机器人在工业,军事,探测等各个领域起着越来越重要和不可替代的位置,机器人研究成为目前世界各国研究的热点。
仿生六足机器人涉及仿生学、机械学、信息技术和传感技术等众多学科,是机器人研究的一大分支。
仿生六足机器人模仿生物界爬行动物的肢体结构,具有良好的机动性和自适应能力,在军事运输、矿山开采、星球探测等众多领域具有广阔前景。
本设计采用ARM内核结构(Cortex-M3)的STM32F103RBT6为主控芯片,通过内部定时器产生脉宽调制信号,以及使用74HC138进行分时复用来控制六足机器人的关节,即18个MG955舵机。
通过BMX-02蓝牙转串口模块连接手机和机器人,实现手机蓝牙遥控。
采用UN2003A电机驱动芯片驱动步进电机,并配合红外传感器使机器人实现智能避障。
由于该机器人拥有18自由度,肢体灵活,还可实现各种类似舞蹈的特殊动作。
【关键词】仿生六足机器人;STM32F103RBT6;舵机控制目录1绪论 (1)1.1课题研究背景意义 (1)1.2仿生六足机器人的现状 (1)1.3本设计系统结构 (2)1.4本论文的组织结构 (2)2肢体结构和步态规划 (3)2.1肢体结构设计 (3)2.2步态规划 (3)2.2.1三角步态 (3)2.3本章小结 (4)3硬件设计介绍与系统各部分工作原理 (5)3.1主控芯片STM32F103RBT6简介 (5)3.2STM32F103RBT6最小系统电路 (5)3.2.1主芯片原理图 (5)3.2.2晶振电路 (6)3.2.3复位电路 (6)3.2.4下载电路 (7)3.3舵机原理与控制 (7)3.3.1舵机内部结构 (7)3.3.2舵机的工作原理错误!未定义书签。
基于 STM32的机器人仿真示教器设计
基于 STM32的机器人仿真示教器设计于振中;蔡楷倜【摘要】为了克服传统机器人示教系统扩展性差且较为封闭等缺点,设计了一种基于STM32的机器人仿真示教器。
该示教器以STM32作为主控芯片,引入μC /OSII实时操作系统,并采用以太网通信的方式,提高了系统的开放性。
通过对利用计算机模拟得到的三维机器人进行仿真操控,验证该示教器的手动控制和示教再现等基本功能。
实验结果表明,该仿真示教器可以灵活方便地练习机器人的示教操作,达到模拟操作实体机器人的效果,具有一定的实用价值。
%In order to overcome the defects of the traditional teaching box such as poor scalability and being closed , a new teaching box based on STM32 is designed.The teaching box uses STM32 as the main control chip, adopting the μC/OSII real-time operating system and the Eth-ernet, which improves the openness of the system .Through controlling the three-dimensional robot simulated by computer , demonstrates the basic functions of manual control and playback of the teaching box .The experimental results show that the teaching box can simulate the effect of operation of the real robot , because it can practice controlling the robot flexibly and conveniently , which prove its practical value .【期刊名称】《微型机与应用》【年(卷),期】2016(035)023【总页数】4页(P38-41)【关键词】示教器;仿真;以太网;开放性【作者】于振中;蔡楷倜【作者单位】江南大学物联网工程学院,江苏无锡214122;江南大学物联网工程学院,江苏无锡214122【正文语种】中文【中图分类】TP242.2当前,工业机器人已经广泛应用于许多工厂的实际使用中,其中通过示教器对机器人的动作进行编程是最为普遍的做法。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,具有双足步行能力,能够模拟人类的步态和动作。
它具有很高的灵活性和稳定性,可以适应不同的地形和环境。
基于STM32F407的双足机器人具有先进的控制系统和智能算法,能够实现复杂的动作和任务。
本文将介绍基于STM32F407的双足机器人的设计原理、控制系统和应用场景。
一、设计原理基于STM32F407的双足机器人主要由机械结构、传感器系统、控制系统和动力系统四个部分组成。
机械结构是双足机器人的骨架,它决定了机器人的外形和运动方式。
传感器系统用于感知环境和身体状态,包括视觉传感器、惯性传感器、力传感器等。
控制系统是双足机器人的大脑,它接收传感器数据并计算出相应的动作指令。
动力系统则负责执行控制系统的指令,驱动机器人进行运动。
1. 高性能处理器:STM32F407是一款高性能的32位微控制器,具有丰富的外设和强大的计算能力,能够满足双足机器人复杂的控制算法和实时运动要求。
2. 多轴驱动:双足机器人需要精确的多轴驱动来实现步行和平衡,STM32F407提供了丰富的PWM输出通道和高速定时器,能够满足机器人的驱动需求。
3. 实时通信:双足机器人需要实时地接收和发送数据,与外部设备进行通信。
STM32F407具有丰富的通信接口和高速外设,能够满足双足机器人的通信需求。
基于STM32F407的双足机器人的设计原理可以满足机器人的高性能计算和实时控制要求,为机器人的稳定步行和复杂动作提供了坚实的技术基础。
二、控制系统基于STM32F407的双足机器人的控制系统包括感知、规划和执行三个部分,实现了双足机器人的全面控制。
感知部分主要通过传感器系统获取环境信息和身体状态,包括视觉、力觉、陀螺仪等传感器,将感知到的数据传输给控制系统。
规划部分主要通过控制算法对感知数据进行处理和分析,得出接下来的运动控制指令。
执行部分主要通过动力系统执行规划好的运动控制指令,控制机器人进行步行和平衡。
基于PID的STM32智能小车机器人的设计

基于PID的STM32智能小车机器人的设计
一、背景简介
随着科技的进步,智能机器人以其灵活且准确的移动技术,已经成为
未来工业自动化及生活中使用的重要装置。
STM32是一款32位微控制器,它具有低成本、低功耗等优点,且易于开发,因此它正在成为自动化光机
器人和其他智能系统的常用控制芯片。
本研究以STM32为核心智能控制器,设计一种基于PID的智能小车机
器人,用于工业全自动化技术,及仿真技术。
通过实验操作,验证此基于PID的STM32智能小车机器人是否具有准确、灵活的移动能力,能够有效
完成定点巡视、遥控等工作任务,达到实时地获取、传输、处理自动控制
的目的。
二、设计内容
2.1STM32控制器硬件选型
本文选择STM32F103C8T6单片机作为PID控制小车机器人的控制核心,采用48引脚封装,外形尺寸为LQFP48、STM32F103C8T6采用ARM
Cortex-M3内核架构,最高时钟频率72MHz,具有128KB读出闪存、20KB SRAM ,外设有12位ADC、USART、CAN、I2C、SPI等。
2.2STM32软件设计
(1)电机驱动软件设计:本设计采用电机驱动电路,电机有4个,
具有分离式驱动结构,采用STM32作为控制器,通过PWM脉冲实现电机的
正反转,从而实现小车机器人的控制,并可实现速度的精确控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
于振 中 , 蔡 楷 佣
( 江 南 大 学 物 联 网工 程 学 院 , 江苏 无锡 2 1 4 1 2 2 )
摘 要 : 为 了克 服 传 统 机 器 人 示 教 系统 扩 展 性 差 且 较 为 封 闭 等 缺 点 , 设 计 了一 种 基 于 S T M3 2的机 器人 仿 真 示 教 器 。 该 示 教 器 以 S T M3 2作 为 主 控 芯 片 , 引入 p  ̄ C / O S I I实 时操 作 系统 , 并 采 用以 太网通信 的方 式 , 提 高 了 系 统 的 开 放 性 。 通 过 对 利 用 计 算 机 模 拟 得 到的 三维机 器人进 行仿 真操 控 , 验证 该示 教 器的手动 控制 和示 教再 现等基 本功 能 。实验 结果表 明 , 该 仿 真 示 教 器 可 以 灵 活 方 便地 练 习机 器人 的示教操 作 , 达 到模 拟 操 作 实体 机 器 人 的 效 果 , 具有 一定 的 实用价值 。 关键 词 : 示教 器 ; 仿真; 以太 网 ; 开 放 性 中图分类 号 : T P 2 4 2 . 2 文献标 识码 : A D O I :1 0 . 1 9 3 5 8 / j . i s s n . 1 6 7 4 — 7 7 2 0 . 2 0 1 6 . 2 3 . 0 1 1
引用格 式 : 于振 中 , 蔡楷 倜 .基 于 S T M3 2的 机器人 仿真 示教 器设计 [ J ] . 微 型机 与应 用 , 2 0 1 6 , 3 5 ( 2 3 ) : 3 8 _ 4 1 .
De s i g n o f r o b o t s i mu l a t e d t e a c h i n g b o x b a s e d o n S TM3 2
Key w or ds:t e a c h i n g bo x;s i mul a t i o n;Et h e r n e t ;o p e nn e s s
0 引 言
采 用 触 摸 屏 与 按 键 结 合 的 输 入 方 式 提 高 了示 教 器 的 人 机 交 互 性 能 。不 仅 如 此 , 利 用 以 太 网 通 信 的 方 式 仅 需 一 根 网 线即可实现与计算机相连 , 不 仅 方 便 快 捷 而 且 能 实 现 跨 平
Yu Zh e n z ho n g,Ca i Ka i t i
( S c h o o l o f l n t e r n e t o f T h i n g s ,J i a n g n a n Un i v e r s i t y ,Wu x i 2 1 4 1 2 2,C h i n a )
Abs t r ac t :I n o r d e r t o o v e r c o me t h e de f e c t s o f t h e t r a di t i o n a l t e a c h i n g b o x s u c h a s p o o r s c a l a bi l i t y a nd b e i n g c l o s e d,a n e w t e a c h i n g b o x ba s e d o n S TM 3 2 i s d e s i g n e d. Th e t e a c hi ng bo x us e s S TM 3 2 as t he ma i n c o nt r o l c hi p,a d o pt i ng t he I x C/OSI I r e a l — t i me o p e r a t i n g s y s t e m a nd t he Et h — e r n et ,wh i c h i mpr o v e s t he o p e n ne s s o f t he s ys t e m . Thr o u g h c o n t r o l l i n g t h e t h r e e — d i me n s i o n a l r o b o t s i mul a t e d by c o mpu t e r, d e mo ns t r a t es t h e ba s i c f un c t i o n s o f ma nu a l c o n t r o l a n d pl a y b a c k o f t he t e a c hi ng bo x. Th e e x p e r i me n t a l r e s u l t s s h o w t h a t t h e t e a c hi n g bo x c a n s i mu l a t e t h e e f f e c t o f o p e r a t i o n o f t he r e a l r o b o t ,be c a us e i t c a n p r a c t i c e c o nt r o l l i n g t he r o b o t le f x i b l y a n d c o nv e ni e n t l y,whi c h p r o v e i t s pr ac t i c a l v a l u e.