车辆主动悬架最优控制之令狐文艳创作
汽车舒适性之令狐文艳创作

第六章汽车舒适性令狐文艳摘要随着人们生活水平的提高,人们对汽车性能的要求除在动力性、经济性、安全性方面之外,在车辆的舒适性、可靠性、耐久性和安全性等方面的要求也越来越高。
良好的驾驶操作性能、舒适的驾乘环境、低振动和低噪声渐渐成为现代汽车的重要标志。
同时,从提高工作效率和降低事故发生率的要求出发,汽车的乘坐及工作环境必须具有一定的舒适性。
为提高汽车的舒适性,本章主要从汽车平顺性、汽车空气调节性能、汽车乘坐环境和驾驶操作性能四个方面进行了具体分析,并针对每一方面都提出了具体的评价指标,影响因素及实验方法。
引言汽车舒适性是指为乘员提供舒适、愉快的乘坐环境、货物的安全运输和方便安全的操作条件的性能。
汽车舒适性包括:汽车平顺性、汽车噪声、汽车空气调节性能、汽车乘坐环境及驾驶操作性能等;它是现代高速、高效率汽车的一个主要性能。
汽车平顺性就是保持汽车在行驶过程中乘员所处的振动环境具有一定舒适度的性能。
对于载货汽车还包括保持货物完好的性能。
汽车行驶时,由于路面不平等因素激起汽车的振动。
振动影响人的舒适、工作效率和身体健康,并影响所运货物的完好;振动还在汽车上产生动载荷,加速零件磨损,导致疲劳失效。
因此,减少汽车振动是汽车平顺性研究的主要问题。
汽车空气调节性能是指对车内空气的温度、湿度和粉尘浓度实现控制调节,使车室内空气经常保持使乘员舒适的状态。
汽车空调是改善工作条件、提高工作效率的重要手段。
汽车乘坐环境及驾驶操作性能是指乘坐空间大小、座椅及操纵件的布置、车内装饰、仪表信号设备的易辨认性等。
随着现代文明进程,汽车越来越多地介入了社会的各个方面,成为与人们工作和生活紧密相关的、大众化的产品,汽车作为“活动房间”的功能日趋完善。
与汽车其它性能不同,汽车舒适性各方面的评价都与人体主观感觉直接相关。
本章将结合汽车人体工程学研究成果,适当介绍必要的相关知识.以期帮助大家树立“人-车-环境”系统研究新概念。
第一节汽车平顺性一、人体对振动的反应和平顺性的评价机械振动对人体的影响,既取决于振动频率与强度、振动作用方向和暴露时间,也取决于人的心理、生理状态、而且心理品质和身体素质不同的人,对振动敏感程度有很大差异:因此,人体对振动作用的反应是一个十分复杂的过程。
车辆主动悬架最优控制之欧阳美创编
车辆主动悬架的控制研究 时间:2021.01.01创作:欧阳美悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
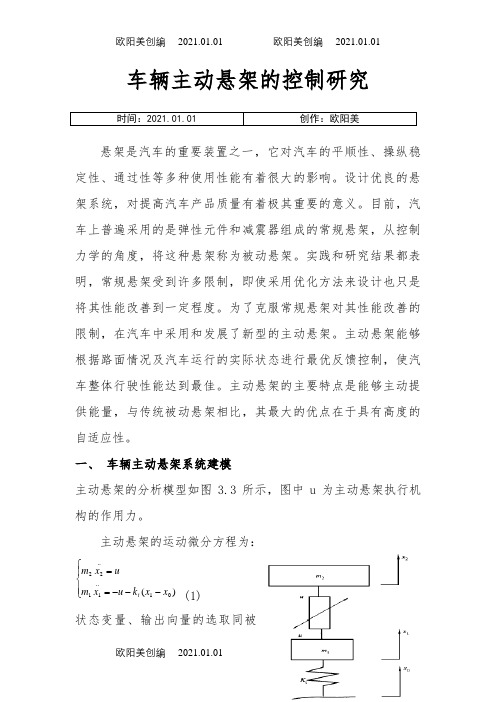
一、 车辆主动悬架系统建模主动悬架的分析模型如图3.3所示,图中u 为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程和输出方程 ⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E 汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。
整车主动悬架系统天棚阻尼控制策略

整车主动悬架系统天棚阻尼控制策略整车主动悬架系统是一种通过调节车辆悬架系统来改善车辆行驶舒适性和稳定性的技术。
天棚阻尼控制策略是整车主动悬架系统中的一个重要组成部分,它通过调节天棚阻尼器的工作状态来达到优化车辆悬架系统参数的目的。
下文将对整车主动悬架系统天棚阻尼控制策略进行详细阐述。
整车主动悬架系统天棚阻尼控制策略的目标是提高车辆的行驶舒适性和稳定性。
行驶舒适性是指车辆在行驶过程中给乘车人员带来的舒适感,稳定性是指车辆在各种工况下保持稳定的能力。
天棚阻尼器在整车主动悬架系统中起到了关键作用,它负责控制车辆的悬架系统的阻尼特性,从而通过调节车辆的垂直动态性能来改善车辆的行驶舒适性和稳定性。
在整车主动悬架系统天棚阻尼控制策略中,首先需要对车辆的动态特性进行建模和分析。
通过对车辆的动力学特性和悬架系统的特性进行建模,可以得到车辆在不同工况下的阻尼需求以及天棚阻尼器的工作要求。
然后,基于车辆建模结果,可以进一步设计天棚阻尼器的控制算法。
天棚阻尼器的控制算法旨在根据车辆的动态需求调节阻尼器的工作状态,从而使车辆在行驶过程中保持良好的舒适性和稳定性。
常见的天棚阻尼器控制算法有PID控制算法、模糊控制算法和神经网络控制算法等。
这些控制算法可以根据车辆的动态特性进行调整,以得到最佳的阻尼调节效果。
最后,在整车主动悬架系统中,还需要采用适当的传感器来获取车辆的动态信息,如车辆的加速度、车身倾斜角等,以及天棚阻尼器的状态信息。
这些传感器可以通过信号处理和滤波技术对车辆的动态特性进行准确的测量和分析,为天棚阻尼控制策略提供必要的输入。
总之,整车主动悬架系统天棚阻尼控制策略是一项关键的技术,它通过调节车辆的悬架系统参数来改善车辆的行驶舒适性和稳定性。
在整车主动悬架系统中,需要建立车辆的动态模型、设计合适的控制算法,并采用适当的传感器来获取车辆的动态信息。
通过有效的天棚阻尼控制策略,可以优化整车主动悬架系统的性能,提高车辆的行驶舒适性和稳定性。
车辆主动悬架技术的现状和发展趋势
第21卷增刊2000年8月 兵工学报A CTA A RM AM EN TA R IIV o l121Supp l1A ug1 2000车辆主动悬架技术的现状和发展趋势王国丽 顾亮 孙逢春(北京理工大学,北京,100081)摘要 主动悬架能大幅度改善悬架的性能。
本文简要地介绍了车辆主动悬架技术的现状,阐述了最优控制、自适应控制等方法,给出了流量控制和压力控制两种控制方式,并指出了主动悬架的发展方向。
关键词 车辆;主动悬架;综述中图分类号 TJ81+0.332 车辆行驶时,由路面不平等因素引起振动,影响乘坐舒适性和操纵稳定性,甚至影响行驶速度,损坏车辆的零部件和运载的货物。
同时车辆振动也是车内噪声的主要来源。
车辆减振主要是通过使用车辆悬架系统来完成。
设计或优化设计方法选择,一经选定,在车辆行驶过程中就无法进行调节,因而不能适应车辆参数、运行工况等的复杂多变。
在某个特定工况下按目标优化出的悬架系统,一旦载荷、车速和路况等发生变化,悬架在新的工况下便不再是最优。
为了克服这个缺陷,国外在50年代就提出了主动悬架的概念[1]。
主动悬架采用有源或无源可控元件组成一个闭环或开环的控制系统,根据车辆系统的运动状态和外部输入的变化(路面激励或驾驶员方向盘操作)作出反应,主动地调整和产生所需的控制力,使悬架始终处于最佳减振状态。
主动悬架由控制系统和执行机构组成,执行机构为有源液压系统的主动悬架简称全主动悬架,而无源主动悬架则简称半主动悬架。
半主动悬架由可调弹簧或可调阻尼器构成,与全主动悬架相比,最大优点是工作几乎不消耗发动机的功率,结构简单,造价较低,因此受到广泛重视[2]。
1 主动悬架系统的控制理论和方法111 最优控制由于地面对车辆的激励是一个随机的过程,所以这类研究的理论基础是线性随机最优控制理论,它通过建立系统的状态方程提出控制目标和加权系数,再应用控制理论求解所设目标下的最优控制规律。
应用于悬架控制的最优控制方法主要可分为两种:传统的线性最优控制(L inear Op ti m al Con tro l)和最优预测控制(P review Con tro l)。
车辆主动悬架最优控制

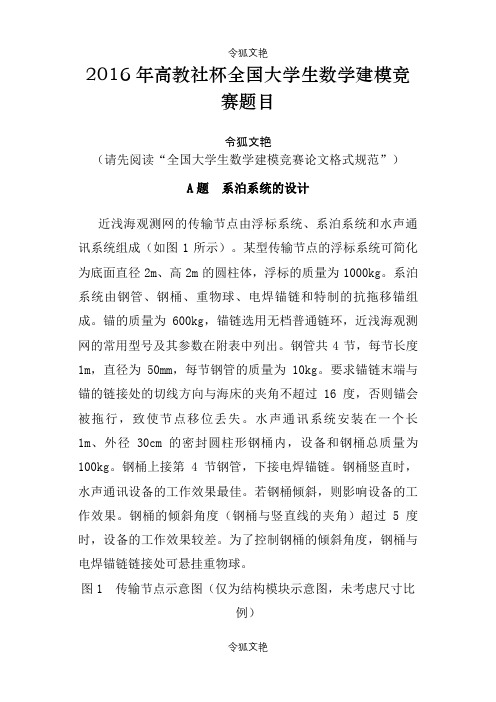
图 1. q1=3.35E5 ,q2 =40.5E5 的幅频特性图 由图 1 可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相 似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化 平缓, 主动悬架的减振性能较为突出; 在高频固有频率附近, 主动悬架的响应幅值变化较大 。 可知取该组权系数时,主动悬架的减振性能的改善程度不够理想; 2) 取 q1=3.35E8,q2 =40.5E8 时,由程序得 k1 =63640;k2=4863;k3 =-36146;k4 =-904;及 系统的传递函数和幅频特性,绘制幅频特性图 %主动悬架 q1=3.35e8;q2=40.5e8 时的仿真程序: m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8; A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0]; B=[0;1/m2;0;-1/m1];D=[0;0;1;0]; C=[0 0 0 0;1 0 0 0;0 0 1 0]; E=[1/m2;0;0];H=[0;0;0]; Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1]; [K,P,F]=lqr(A,B,Q,R) M=A-B*K; N=C-E*K; G=ss(M,D,N,H); G1=tf(G) i=1; for s=0:0.1:80 s=s*2*pi*j; G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);
《基于智能控制的汽车主动悬架控制策略研究》范文

《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,人们对汽车行驶的平稳性、安全性和舒适性要求越来越高。
汽车主动悬架系统作为提高汽车行驶性能的关键技术之一,其控制策略的研究显得尤为重要。
传统的被动悬架系统已经无法满足现代汽车的需求,而基于智能控制的主动悬架系统则能够更好地适应复杂的道路环境,提高汽车的行驶性能。
本文旨在研究基于智能控制的汽车主动悬架控制策略,为汽车悬架系统的设计和优化提供理论依据。
二、智能控制技术概述智能控制技术是一种基于人工智能、计算机技术和控制理论的技术,具有自适应、自学习和优化的特点。
在汽车主动悬架系统中,智能控制技术可以实现对车辆行驶状态的实时监测和调整,提高车辆的行驶稳定性和舒适性。
目前,常见的智能控制技术包括模糊控制、神经网络控制、遗传算法控制等。
三、汽车主动悬架系统概述汽车主动悬架系统是一种能够根据道路条件和车辆行驶状态实时调整悬架参数的系统。
与传统的被动悬架系统相比,主动悬架系统具有更好的适应性和控制性,能够更好地提高车辆的行驶性能。
主动悬架系统主要由传感器、控制器和执行器等部分组成,其中控制器是整个系统的核心。
四、基于智能控制的汽车主动悬架控制策略研究4.1 模糊控制策略模糊控制是一种基于模糊逻辑的控制方法,具有较好的鲁棒性和适应性。
在汽车主动悬架系统中,模糊控制可以根据传感器采集的车辆状态信息,通过模糊推理方法对悬架参数进行调整,实现对车辆行驶状态的优化。
研究表模糊控制策略可以有效地提高车辆的平稳性和安全性。
4.2 神经网络控制策略神经网络是一种模拟人脑神经元工作的计算模型,具有自学习和自适应的能力。
在汽车主动悬架系统中,神经网络控制可以通过学习大量的驾驶数据,自动调整悬架参数,实现对车辆行驶状态的优化。
研究表明,神经网络控制策略可以更好地适应不同的道路环境和驾驶需求。
4.3 遗传算法控制策略遗传算法是一种模拟自然进化过程的优化算法,具有全局搜索和优化能力。
汽车主动悬架控制系统的发展研究
汽车主动悬架控制系统的发展研究汽车主动悬架控制系统(Active Suspension System)是指通过电子控制系统实现对汽车悬架系统的主动控制,以提供更好的悬挂性能和乘坐舒适性。
该技术最早在20世纪80年代末期开始研究,到目前已经取得了显著的进展。
在早期的汽车悬挂系统中,弹簧和减振器是主要的悬挂元件,只能提供有限的悬挂调节功能。
而主动悬架系统则通过使用传感器、电机和控制单元等装置,实现对悬架系统的主动控制。
这样可以根据不同的路况和驾驶需求,自动调整悬挂刚度和阻尼,提高行驶稳定性和车辆控制性能。
1.第一代:早期的主动悬架系统通过对悬架刚度和阻尼进行调整来改善悬挂性能。
这些系统使用了传感器来监测车身的倾斜、加速度和行驶状态,并通过电控单元控制悬挂系统。
2.第二代:第二代主动悬架系统引入了主/从结构,即一个悬架控制单元控制多个悬架单元。
这样可以提供更好的悬挂调节性能和更高的可靠性。
3.第三代:第三代主动悬架系统进一步扩展了悬架控制的范围和灵活性。
除了调整刚度和阻尼外,这些系统还可以主动控制悬架高度和行驶高度,进一步提高车辆的稳定性和驾驶舒适性。
4.第四代:第四代主动悬架系统开始应用更高级的控制算法和传感器技术。
这些系统可以通过对车辆动力学和车辆状态的精确建模,实现更精准的悬挂控制。
同时,他们还可以采用更高级的传感器技术,如激光雷达和摄像头,来感知车辆周围环境,提供更全面的悬挂调节功能。
当前,汽车主动悬架控制系统已经广泛应用于高档豪华车和跑车等高性能车型中。
它们可以根据驾驶员的驾驶风格和乘坐舒适性需求,自动调整悬挂刚度和阻尼,并提供更好的悬挂性能和驾驶体验。
除了提供更好的驾驶和乘坐体验外,汽车主动悬架控制系统还具有其他一些优点。
首先,它可以改善汽车的悬挂系统寿命,减少零件的磨损和损坏。
其次,它可以减少车辆的噪音和振动,提高乘坐舒适性。
最后,它还可以提高车辆的行驶稳定性和操控性能,减少事故和碰撞的风险。
汽车主动悬架的最优控制及计算机仿真

汽车主动悬架的最优控制及计算机仿真
陈无畏;沈云鹤
【期刊名称】《振动与冲击》
【年(卷),期】1996(015)004
【摘要】本文分析了汽车主动悬架和被动悬架的基本工作性能,基于随机最优控制理论,建立了悬架系统的数学模型,并进行了分析,计算,模拟计算结果及幅频特性图表明主动悬架在改善汽车行驶平顺性和操纵稳定性方面,要优于被动悬架。
【总页数】7页(P53-58,67)
【作者】陈无畏;沈云鹤
【作者单位】安徽工学院;上海公用事业学校
【正文语种】中文
【中图分类】U463.330.1
【相关文献】
1.汽车半主动悬架线性二次型最优控制 [J], 方春杰
2.基于Matlab最优控制主动悬架对汽车侧翻稳定性仿真分析 [J], 陈丽静
3.轮毂电机驱动电动汽车主动悬架最优控制研究 [J], 范珍珍
4.轮毂电机驱动汽车半主动悬架自适应最优控制 [J], 李仲兴;宋鑫炎;刘晨来;薛红涛
5.轮毂电机驱动汽车半主动悬架自适应最优控制 [J], 李仲兴;宋鑫炎;刘晨来;薛红涛
因版权原因,仅展示原文概要,查看原文内容请购买。
高教社杯全国大学生数学建模竞赛题目A.B之令狐文艳创作
2016年高教社杯全国大学生数学建模竞赛题目令狐文艳(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题系泊系统的设计近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。
某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。
系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。
锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。
钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。
要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。
水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。
钢桶上接第4节钢管,下接电焊锚链。
钢桶竖直时,水声通讯设备的工作效果最佳。
若钢桶倾斜,则影响设备的工作效果。
钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。
为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
图1 传输节点示意图(仅为结构模块示意图,未考虑尺寸比例)系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。
现将该型传输节点布放在水深18m、海床平坦、海水密度为 1.025×103kg/m3的海域。
若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。
请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。
问题 3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。
车辆主动悬架最优控制之欧阳学创编
车辆主动悬架的控制研究悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
一、车辆主动悬架系统建模主动悬架的分析模型如图3.3所示,图中u为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程和输出方程 ⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。
车辆主动悬架最优控制之欧阳理创编
车辆主动悬架的控制研究悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
一、车辆主动悬架系统建模主动悬架的分析模型如图 3.3所示,图中u为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程和输出方程 ⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。
浅析汽车底盘主动悬架控制方法

浅析汽车底盘主动悬架控制方法1. 引言1.1 概述汽车底盘主动悬架控制方法是一种能够提高车辆悬挂系统性能和舒适性的技术。
随着汽车工业的发展和人们对行车舒适性和安全性要求的提高,底盘主动悬架控制方法逐渐受到重视。
底盘主动悬架控制方法通过感知路况和车辆运动状态,采取相应的控制策略来调节悬架系统的工作状态,以提高车辆的操控性、稳定性和舒适性。
不同类型的底盘主动悬架控制方法采用不同的技术手段和控制算法,如电磁悬架、液压悬架、空气悬架等。
本文将重点介绍各种主动悬架控制方法的原理、特点和应用领域,以及不同方法之间的优缺点比较。
通过对底盘主动悬架控制方法的深入研究和分析,可以为汽车制造商和研发人员提供参考,促进底盘主动悬架技术的进一步发展和应用。
在未来,底盘主动悬架控制方法将在汽车行业发挥越来越重要的作用,为驾驶员提供更安全、舒适的驾驶体验。
1.2 研究背景汽车底盘主动悬架控制方法作为汽车底盘控制技术的一种重要手段,具有极其重要的应用价值和发展前景。
随着汽车工业的飞速发展,人们对汽车的舒适性、安全性和性能要求越来越高,传统的被动悬架系统已经不能满足人们的需求。
研究和开发底盘主动悬架控制方法成为了当前汽车工程领域的热点之一。
底盘主动悬架控制方法的研究背景主要包括以下几个方面。
随着汽车性能的提升,底盘控制技术对于提高汽车的行驶稳定性、通过性和舒适性等方面起到了至关重要的作用。
随着电子技术的不断发展和应用,底盘主动悬架控制方法可以通过精确控制悬架系统的工作状态,提高汽车的行驶性能和安全性。
底盘主动悬架控制方法可以实现不同路况下的智能调节,提高汽车通过不同路面时的适应能力和稳定性。
底盘主动悬架控制方法的研究还可以促进汽车工业的发展,推动汽车制造技术的进步,为人类社会的可持续发展做出积极贡献。
深入研究和开发底盘主动悬架控制方法具有重要的现实意义和理论意义。
1.3 研究目的研究目的是为了深入了解汽车底盘主动悬架控制方法的原理和应用,探讨不同类型的悬架控制方法的优缺点,为汽车制造商和工程师提供有效的参考和指导。
本科毕业论文汽车主动控制悬架系统研究
1.2 悬架系统的性能要求
车辆动力学模型是进行性能分析和系统设计的基础,下图说明了与车辆行驶动力学 有关的重要性能特性。
在有限的悬架工作空间内,设计师必须为驾驶员和乘客提供良好的乘坐舒适性、可 接受的车身姿态、以及对车轮动载荷的合理控制。
(3) 悬架的动行程要控制在允许的范围内,以尽量保证不发生限位块撞击所引起的 对人和货物的冲击;
(4) 从舒适性和稳定性考虑保证良好的车身姿态; (5) 此外,还需考虑再结合其它控制系统的情况下的车辆总体性能的要求,如结合 自动防抱死系统(ABS)、牵引力控制系统(TCS)和四轮转向系统(4WS)等在不同车 辆工况下(如启动、制动、转弯时),仍需保证对车身的方向控制和姿态控制,或根据 需要提供各轮胎的载荷分布,同时提供良好的乘坐舒适性。 以上要求在车辆参数变化时也同样需要保证(如车身载荷或轮胎垂直刚度在一定范 围内变化)。但是对这样的理想悬架设计期望似乎过于苛求。而实际上在通常的悬架设 计中,上述各项要求及性能之间存在着冲突与矛盾。比如在一个低刚度的软悬架能获得 较好的乘坐舒适性,但同时需要较大的悬架空间又带来较差的车身姿态控制;而为了保 证较好的操纵稳定性,使车辆在转弯、起动和刹车时车体的点头、后坐较小,又要求车 辆具有较“硬”的特点。在实际中,车辆行驶在一个多变的环境中,可能包括不同的路面 输入(如不同的车速和路面不平度),不同的车辆工况(如车辆在加速、制动、转弯时 等工作情况),而且车辆参数本身也可能发生变化(如随乘员和货物的多少而改变的车 身质量,以及随车速和温度、胎质而改变的轮胎刚度等)。因此,悬架设计师要对以上 变化因素给予充分考虑。多年来,车辆工程师们正是通过反复不断的探索,使其设计性 能尽量体现对以上各因素合理的折中,以及对不同性能的要求及侧重,以实现尽可能的 综合。
主动悬架控制策略介绍

主动悬架控制策略介绍【摘要】悬架是现代汽车最重要的组成之一,悬架结构的选用,不但在很大程度上决定了汽车平顺性的优劣,而且随着汽车速度的提高,对于与行驶速度密切相关的操纵稳定性的影响也越来越大。
因此,设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
悬架系统的研究由来已久,悬架系统按照控制原理和控制功能可以分为被动、半主动、主动悬架,这些悬架在性能上有很大的差别。
由于主动悬架不但能很好地隔离路面振动,而且能控制车身运动,比如启动和制动时的俯仰、转弯时的侧倾等,另外还可以调节车身的高度,提高轿车在恶劣路面的通过性。
因此对主动悬架的研究吸引了一大批工程师对其投入研究,各种控制方法和作动器也被相继研究出来,本文主要对这些方法进行一些简介,以供同行参考研究并对其中的最优控制算法的LQG控制器进行探讨。
【关键词】主动悬架LQG控制器单轮模型Introduction of active suspension control strategy Abstract Suspension is one of the most important parts in the modern automobile, the suspension structure, not only largely determines the quality and ride comfort of the vehicle, with the vehicle speed, closely related to the speed of handling and stability and have greater influence. Therefore, it is very important to design a good suspension system to improve the quality of automotive products. Suspension system has been studied for a long time. The suspension system can be divided into passive, semi-active and active suspension according to the control principle and control function. The active suspension can not only well isolated vibration, but also can control the body motion, such as pitching and turning starting and braking when the roll, also can adjust body height, increase the car in bad road through sex. So the research of active suspension has attracted a large number of engineers for its investment in research, various control methods and actuators have been studied in this paper, some of these methods, for reference and Research on LQG controller on the optimal control algorithm is discussed.Key words Active suspension The LQG controller The single wheel model1.主动悬架的几种控制策略1.1天棚阻尼器控制方法(Skyhook Control)天棚阻尼器控制理论是由Karnopp提出,在主动悬架的控制系统中被广泛采用。
汽车主动控制悬架系统的发展

汽车主动控制悬架系统的发展
刘少军
【期刊名称】《汽车技术》
【年(卷),期】1996(000)003
【摘要】主动控制悬架有使汽车乘坐舒适性和操纵安全性得到改善,本文简要地介绍了国外汽车主动控制悬架系统的发展及现状;给出了流量控制型和压力控制型两种控制方式的简图;阐述压力控制型主动悬架系统的基本工作原理,以及天棚阻尼器控制、最优控制、预见控制等方法。
【总页数】4页(P1-4)
【作者】刘少军
【作者单位】无
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.概述汽车主动控制悬架系统的工作原理及控制模式 [J], 郭丽萍
2.基于策略分层的汽车悬架与转向系统主动控制 [J], 祝辉;陈无畏
3.基于磁流变阻尼器的汽车悬架半主动控制系统设计 [J], 王伟
4.汽车磁流变智能阻尼悬架系统的半主动控制研究 [J], 刘云云
5.汽车磁流变智能阻尼悬架系统的半主动控制研究 [J], 刘云云
因版权原因,仅展示原文概要,查看原文内容请购买。
悬架的未来汽车电子控制式主动悬架
悬架的未来汽车电子控制式主动悬架
asideffur
【期刊名称】《当代汽车》
【年(卷),期】2007(000)011
【摘要】@@ 在前面几期,我们全面介绍了轿车常用的各种机械式悬架的结构和特点,相信大家在了解这些知识后,对爱车的操控特性有了更深一步的认识吧!我们之前所介绍的各种悬架至少都有几十年历史了,而下一代悬架技术已悄然进入了一个全新的领域,它就是电子控制式主动悬架.
【总页数】2页(P88-89)
【作者】asideffur
【作者单位】无
【正文语种】中文
【相关文献】
1.悬架的未来——汽车电子控制式主动悬架 [J], 艾斯帝夫
2.汽车电子控制主动悬架系统设计的探讨 [J], 陈建;高云
3.汽车主动悬架电子控制单元设计 [J], 黄榕清;许迎东;向铁明
4.探析汽车电子控制主动悬架系统设计 [J], 周振
5.探析汽车电子控制主动悬架系统设计 [J], 周振;
因版权原因,仅展示原文概要,查看原文内容请购买。
车辆半主动悬架技术的发展现状

车辆半主动悬架技术的发展现状
高石;谷中丽;王素贞
【期刊名称】《内蒙古石油化工》
【年(卷),期】2006(032)006
【摘要】本文主要介绍了车辆半主动悬架技术产生的背景、半主动悬架执行机构-可调阻尼减振器的发展现状和最优控制、自适应控制、模糊控制等半主动悬架控制策略,并指出性能价格比和可靠性是车辆半主动悬架技术商品化、产业化的关键.【总页数】3页(P45-47)
【作者】高石;谷中丽;王素贞
【作者单位】北京理工大学机械与车辆工程学院电动车辆工程系技术中心;北京理工大学机械与车辆工程学院电动车辆工程系技术中心;北京理工大学机械与车辆工程学院电动车辆工程系技术中心
【正文语种】中文
【中图分类】TE6
【相关文献】
1.车辆半主动悬架系统及其控制技术
2.多轴车辆半主动悬架控制技术分析与仿真
3.关于车辆半主动悬架技术的研究
4.基于硬件在环与远程参数控制技术的半主动悬架车辆道路模拟试验
5.车辆半主动悬架系统及其控制技术
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车辆主动悬架的控制研究令狐文艳悬架是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的是弹性元件和减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践和研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用和发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
一、车辆主动悬架系统建模主动悬架的分析模型如图3.3所示,图中u为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程和输出方程 ⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E汽车悬架可认为是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标是二次函数积分型的调节器问题,外界干扰是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍是寻找最优控制)(t u ,使目标函数J 取极小。
线性调节器的主要问题之一是如何选择Q 、R 阵以获得比较满意的控制过程动态响应,计算机仿真可以解决这个问题。
在悬架设计中,为提高汽车的操纵稳定性和行驶平顺性,应使簧载质量垂直加速度、悬架动扰度及轮胎动变形较小。
此外,从实现控制的角度来看,应使所需的控制能量较小。
因此式(3)可写为⎰∞+-+-=022*******])()([dt Ru x x q x x q J (4)或写为 ⎰∞+=02][dt Ru QX X J T (5)其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000000000000012q q Q这里,q 1——轮胎动变形加权系数q 2——悬架动扰度加权系数式(3.9)中第一、二项为误差指标,表示在0~∞整个时间内系统实际状态与平衡之间的误差总和。
这一积分越小,说明控制误差越小,性能越好。
积分式中第三项为能量指标,表示在0~∞整个时间内支付能量的总和。
系统状态转移是考控制u(t)来进行的,为要使系统误差很小,则需要支付很大的能量代价。
最优反馈增益系数矩阵式可写成])()([)(1401322121。
+x k x x k x k x x k kX t u +-+--=-= (6)式中,增益值k 1~k 4有明确的物理意义。
k 1可等效于一放置于簧载和非簧载质量间的弹簧,改变k 1则影响簧载质量的固有频率;k 2作用于簧载质量的绝对速度上,影响其悬挂阻尼;k 3大小涉及轮胎变形,对车轮的垂直弹跳频率产生影响;k 4作用于非簧载质量的速度上,影响其非悬挂阻尼。
二、 主动悬架系统的能控性,能观测性能控性和能观测性是系统的一种特性,是现代控制理论中的两个基本概念。
状态完全能控的充分必要条件是能控矩阵[]B A AB A C n o 1-= 满秩;状态完全能观测的充分必要条件是能观测矩阵[]T n T T T T b C A C A C O 1)(-= 满秩。
主动悬架系统参数的选取如下,即m 1=36kg ;m 2=240kg ;k t =160000N/m ;将参数值带入矩阵,利用Matlab 中的函数C o =ctrb(A,B)求悬架系统的能控矩阵C o ,利用函数r A =rank(C o )得矩阵的秩为r A =4,满秩,故系统是能控的。
利用Matlab 中的函数O b =obsv(A,C)求悬架系统的能观测矩阵O b ,利用函数r B =rank(O b )得矩阵的秩为r B =4,满秩,故系统是能观测的。
三、主动悬架的频域仿真为了求得主动悬架系统的最优控制u(t),必须先求得反馈增益矩阵K,而K矩阵的求解决定于黎卡提代数方程的解—P矩阵,这可以用计算机来实现求解。
程序用Matlab语言编写,给定一组矩阵A、B、Q、R 的有关数据,经过计算,便可以最终得到相应的矩阵P、K 的数值。
下面取三组不同权系数q1,q2进行计算分析;1)取q1=3.35E5,q2=40.5E5时,由程序得k1=2012.5,k2=977.1,k3=-1874.8,k4=-31.3,并求得系统的传递函数及幅频特性,绘制系统的幅频特性图%主动悬架q1=3.35e5;q2=40.5e5时的仿真程序:m1=36;m2=240;kt=160000;q1=3.35e5;q2=40.5e5;A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0];B=[0;1/m2;0;-1/m1];D=[0;0;1;0];C=[0 0 0 0;1 0 0 0;0 0 1 0];E=[1/m2;0;0];H=[0;0;0];Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1];[K,P,F]=lqr(A,B,Q,R)M=A-B*K;N=C-E*K;G=ss(M,D,N,H);G1=tf(G)i=1;for s=0:0.1:80s=s*2*pi*j;G11=(7.811 *s^3 + 580.4 *s^2 + 3.727e004 *s + 1.422e-010)/(s^4 + 4.942 *s^3 + 4457 *s^2 + 1.809e004 *s + 3.727e004);G12=(-4385 *s - 1.751e004)/(s^4 + 4.942 *s^3 + 4457 *s^2 + 1.809e004 *s + 3.727e004);G13=(s^3 + 4.942 *s^2 + 64.29 *s - 2.145e-013)/(s^4 + 4.942 *s^3 + 4457 *s^2 + 1.809e004 *s + 3.727e004);f(i)=abs(G11);h(i)=abs(G12);g(i)=abs(G13);i=i+1;ends=0:0.1:80;figureloglog(s,f,'-',s,h,'-.',s,g,':')legend('加速度','动扰度','动载荷')图1. q1=3.35E5,q2=40.5E5的幅频特性图由图1可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化平缓,主动悬架的减振性能较为突出;在高频固有频率附近,主动悬架的响应幅值变化较大。
可知取该组权系数时,主动悬架的减振性能的改善程度不够理想;2)取q1=3.35E8,q2=40.5E8时,由程序得k1=63640;k2=4863;k3=-36146;k4=-904;及系统的传递函数和幅频特性,绘制幅频特性图%主动悬架q1=3.35e8;q2=40.5e8时的仿真程序:m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8;A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0];B=[0;1/m2;0;-1/m1];D=[0;0;1;0];C=[0 0 0 0;1 0 0 0;0 0 1 0];E=[1/m2;0;0];H=[0;0;0];Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1];[K,P,F]=lqr(A,B,Q,R)M=A-B*K;N=C-E*K;G=ss(M,D,N,H);G1=tf(G)i=1;for s=0:0.1:80s=s*2*pi*j;G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);G12=(-3290*s - 7.332e004)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);G13=(s^3 + 45.36*s^2 + 2033*s + 5.386e-012)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);f(i)=abs(G11);h(i)=abs(G12);g(i)=abs(G13);i=i+1;ends=0:0.1:80;figureloglog(s,f,'-',s,h,'-.',s,g,':')legend('加速度','动扰度','动载荷')图2. q1=3.35E8,q2=40.5E8的幅频特性图由图2看出,主动悬架的低频共振频率明显地偏离了低频固有频率,与取前一组加权系数的主动悬架相比,悬架在高频附近幅值变化较大的现象得到很大改善,由于q1,q2主要为轮胎动变形和悬架动扰度的加权系数,可以看出相对于上一组加权系数,轮胎动变形和悬架动扰度的幅频特性得到了显著的改善,即车辆的平顺性和操纵稳定性得到显著提高。
3) 取q1=3.35E9,q2=40.5E9时,由程序得k1=201250,k2=7710,k3=-61600,k4=-2340,及系统的传递函数和幅频特性,绘制幅频特性图%主动悬架q1=3.35e9;q2=40.5e9时的仿真程序:m1=36;m2=240;kt=160000;q1=3.35e9;q2=40.5e9;A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0];B=[0;1/m2;0;-1/m1];D=[0;0;1;0];C=[0 0 0 0;1 0 0 0;0 0 1 0];E=[1/m2;0;0];H=[0;0;0];Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1];[K,P,F]=lqr(A,B,Q,R)Co=ctrb(A,B);rA=rank(Co);Ob=obsv(A,C)rB=rank(Ob);M=A-B*K;N=C-E*K;G=ss(M,D,N,H);G1=tf(G)i=1;for s=0:0.1:80s=s*2*pi*j;G11=(256.7*s^3 + 4.335e004*s^2 + 3.727e006*s - 2.178e-008)/(s^4 + 97.13*s^3 + 9162*s^2 + 1.427e005*s + 3.727e006);G12=(-2477*s - 9.938e004)/(s^4 + 97.13*s^3 + 9162*s^2 + 1.427e005*s + 3.727e006);G13= (s^3 + 97.13*s^2 + 6429*s + 1.635e-010)/(s^4 + 97.13*s^3 + 9162*s^2 + 1.427e005*s + 3.727e006);f(i)=abs(G11);h(i)=abs(G12);g(i)=abs(G13);i=i+1;ends=0:0.1:80;figureloglog(s,f,'-',s,h,'-.',s,g,':')legend('加速度','动扰度','动载荷')图3. q1=3.35E9,q2=40.5E9的幅频特性图由图3可知主动悬架的低频共振频率同样明显地偏离了低频固有频率,在高频处,主动悬架的共振峰“几乎”已消失,知悬架在高频处对振动的抑制较为明显。