使用STL指令的PLC顺序控制编程方法
使用STL指令的编程方法
使用STL指令的编程方法一、STL/RET 指令STL 指令可以使编程者生成流程和工作与顺序功能图非常接近的程序。
STL 指令的意义为激活某个步(即状态),在梯形图上体现为从主母线上引出的状态接点。
STL 指令有建立子母线的功能,从而使该状态的所有操作均在子母线上进行。
步进返回指令 RET 是指状态流程结束,用于返回主母线。
一般 FX 系列 plc 采用状态器 S 编制顺控程序,并与 STL 指令一起使用。
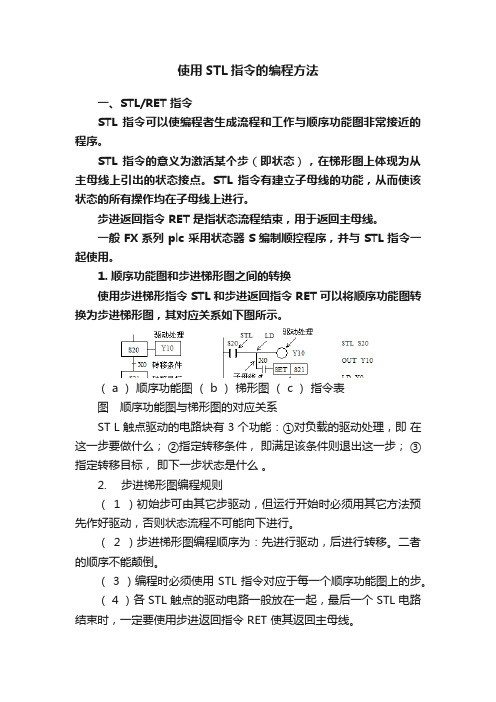
1. 顺序功能图和步进梯形图之间的转换使用步进梯形指令 STL 和步进返回指令 RET 可以将顺序功能图转换为步进梯形图,其对应关系如下图所示。
( a )顺序功能图( b )梯形图( c )指令表图顺序功能图与梯形图的对应关系ST L 触点驱动的电路块有 3 个功能:①对负载的驱动处理,即在这一步要做什么;②指定转移条件,即满足该条件则退出这一步;③指定转移目标,即下一步状态是什么。
2. 步进梯形图编程规则(1 )初始步可由其它步驱动,但运行开始时必须用其它方法预先作好驱动,否则状态流程不可能向下进行。
(2 )步进梯形图编程顺序为:先进行驱动,后进行转移。
二者的顺序不能颠倒。
( 3 )编程时必须使用 STL 指令对应于每一个顺序功能图上的步。
( 4 )各 STL 触点的驱动电路一般放在一起,最后一个 STL 电路结束时,一定要使用步进返回指令 RET 使其返回主母线。
( 5 ) STL 触点可以直接驱动也可以通过别的触点驱动,如 Y 、M 、 S 、 T 、 C 等元件的线圈和应用指令。
( 6 )驱动负载使用 OUT 指令,当同一负载需要连续多步驱动时可使用多重输出,也可使用SET 指令将负载置位,等到负载不需要驱动时再用 RST 指令将其复位。
( 7 )由于 CPU 只执行活动步对应的电路块,因此使用 STL 指令时允许“双线圈”输出,即不同的STL 触点可以分别驱动同一编程元件的一个线圈。
信捷stle指令用法

信捷stle指令用法
"信捷"(XINJIE)是一个中国知名的自动化设备制造商,其PLC(可编程逻辑控制器)在工业自动化领域有一定的应用。
关于"STLE"指令,我无法直接为你提供明确的信息,因为到目前为止,我无法确认有通用的或特定于XINJIE PLC的"STLE"指令。
不过,如果你是在询问通用PLC编程中的STL(Sequence Control Language)指令,那么我可以为你提供一些基本的信息。
STL(步进指令)主要用于步进顺序控制,通常用于控制一个或多个输出在特定的条件满足时按顺序激活。
例如,在某些PLC编程环境中,你可能会看到如下的STL语句:
```scss
STL S0 // 开始一个新序列
STL S2 // 执行下一个序列步骤
END // 结束当前序列
```
在这个例子中:
`STL S0` 开始一个新的序列,通常对应于一个特定的操作或任务。
`STL S2` 指向序列中的下一个步骤。
当当前步骤的条件满足时,PLC会移动到这个步骤。
`END` 表示序列的结束。
为了获得更具体的信息和帮助,你可能需要查阅XINJIE PLC的官方文档或联系其技术支持以获取更详细的关于"STLE"指令的信息。
此外,PLC编程是一个相对专业和具体的领域,如果你不熟悉这方面的知识,可能需要进一步的学习或寻求专业人士的帮助。
顺控指令的使用方法和注意事项

顺控指令的使用方法和注意事项
顺控指令,即顺序控制指令,主要用于PLC编程中实现逻辑控制的流程化、顺序化。
使用方法主要包括:
1. 初始化:设置初始步(如S0),作为流程起点。
2. 逻辑转移:根据条件设置转移指令(如STL、RET、CALL等),实现从一步到另一步的跳转。
3. 动作执行:在每一步内编写相应的输出、定时、计数等操作。
注意事项:
1. 步进必须逐级进行,不可越级转移。
2. 注意初始化与结束处理,避免死循环或未完成全部流程。
3. 条件转移应确保逻辑严谨,避免因条件缺失导致流程混乱。
4. 保持程序清晰,合理使用标签和注释,方便后期维护。
5. 复杂顺控程序中,可能需要用到状态寄存器、堆栈等功能,注意合理运用。
PLC编程中的STL是什么
PLC厂家设计了专门用于编制顺序控制程序的指令和编程元件;
其中,STL为步进梯形指令Step Ladder Instruction;
SET:置位,使触点闭合;
RET:复位,使之断开;
使用STL指令时应该注意以下一些问题:
1与STL触点相连的触点应使用LD或LDI指令,即LD点移到STL触点的右侧,直到出现下一条STL指令或出现RET指令,RET指令使LD点返回左侧母线;各个STL触点驱动的电路一般放在一起,最后一个电路结束时—定要使用RET指令;
2STL触点可以直接驱动或通过别的触点驱动Y、M、S、T等元件的线圈,STL触点也可以使Y、M、S等元件置位或复位;
3STL触点断开时,CPU不执行它驱动的电路块,即CPU只执行活动步对应的程序;在没有并行序列时,任何时候只有一个活动步,因此大大缩短了扫描周期;
4由于CPU只执行活动步对应的电路块,使用STL指令时允许双线圈输出,即同一元件的几个线圈可以分别被不同的STL触点驱动;实际上在一个扫描周期内,同一元件的几条OUT指令中只有一条被执行;
5STL指令只能用于状态寄存器,在没有并行序列时,一个状态寄存器的STL触点在梯形图中只能出现一次;
6STL触点驱动的电路块中不能使用MC和MCR指令,但是可以使用CJP和EJP指令;当执行CJP 指令跳人某一STL触点驱动的电路块时,不管该STL触点是否为“1”状态,均执行对应的EJP 指令之后的电路;
7与普通的辅助继电器一样,可以对状态寄存器使用LD、LDI、AND、ANI、OR、ORI、SET、RST、OUT等指令,这时状态器触点的画法与普通触点的画法相同;
8使状态器置位的指令如果不在STL触点驱动的电路块内,执行置位指令时系统程序不会自动将前级步对应的状态器复位;。
PLC步进指令使用

第4章步进指令各大公司生产的PLC都开发有步进指令,主要是用来完成顺序控制,三菱FX系列的PLC有两条步进指令,STL(步进开始)和RET(步进结束)。
4.1 状态转移(SFC)图在顺序控制中,我们把每一个工序叫做一个状态,当一道工序完成做下一道工序,可以表达成从一个状态转移到另一个状态。
如有四个广告灯,每个灯亮1秒,循环进行。
则状态转移图如图4-1所示。
每个灯亮表示一个状态,用一个状态器S,相应的负载和定时器连在状态器上,相邻两个状态器之间有一条短线,表示转移条件。
当转移条件满足时,则会从上一个状态转移到下一个状态,而上一个状态自动复位,如要使输出负载能保持,则应用SET来驱动负载。
每一个状态转移图应有一个初始状态器(S0~S9)在最前面。
初始状态器要通过外部条件或其他状态器来驱动,如图中是通过M8002驱动。
而对于一般的状态器一定要通过来自其他状态的STL指令驱动,不能从状态以外驱动。
下面通过一个具体例子来说明状态转移图的画法。
例4-1有一送料小车,初始位置在A点,按下启动按钮,在A点装料,装料时间5s,装完料后驶向B点卸料,卸料时间是7s,卸完后又返回A点装料,装完后驶向C点卸料,按如此规律分别给B、C两点送料,循环进行。
当按下停止按钮时,一定要送完一个周期后停在A点。
写出状态转移初始状态器图。
分析:从状态转移图中可以看出以下几点: (1) 同一个负载可以在不同的状态器中多次输出。
(2) 按下起动按钮X4,M0接通,状态可以向下转移,按下停止按钮,M0断开,当状态转移到S0时,由于M0是断开的,不能往下转移,所以小车停在原点位置。
(3) 要在步进控制程序前添加一段梯形图(见图4-3b )(b ) 梯形图(a ) 状态转移图图4-3 控制送料小车状态转移图M0 启动辅助继电器X1 原点条件M8002T3X1S23S22X3S23T2S21S24X1X2T1S22S21T0S20S0打开卸料阀小车左行Y4A点Y2T3C点K70小车左行Y4小车右行打开装料阀原点指示Y1Y3T2K50Y0A点打开卸料阀小车右行B点Y2T1K70Y3打开装料阀Y1T0 K504.2 步进指令4.2.1步进指令步进指令有两条:STL和RET。
西门子PLC位逻辑指令(STL)
西门子PLC位逻辑指令(STL)(六月份第四周自动化讲义韩书峰)一、与指令和与非指令例如: A I0.0AN I0.1二、或指令和或非指令例如:O I.0ON I0.1三、异或指令和异或非指令例如:X 0.0XN 0.1注:两个X指令将组成异或指令,一个X指令与一个XN指令将组成同或指令。
四、位逻辑指令的组合形式1、先与后或PLC执行程序时有先与后或的规律。
例如: A M0.0AN I0.0OA M0.1AN I0.1= Q0.02、与(非)嵌套如果有需要先或、再与的运算,需要把或运算逻辑放在括号内。
例如:A(O M0.0O I0.0)AN M0.03、或(非)嵌套如果有需要优先运算的时候,可以把优先运算部分放在括号内,然后再执行或运算。
例如:O(L 23L MW10>=I)O I0.0= Q0.04、异或(非)嵌套X()XN()5、赋值指令=6、置位指令S7、复位指令R8、对RLO操作指令CLR 用于清除RLO,SET 用于置位RLO ,NOT 用于对RLO取反SA VE 用于把RLO保存到BR9、上升沿指令与下降沿指令FN 检测RLO下降沿指令FP 检测RLO上升沿指令例如: A I0.0FP M0.0= Q0.09、地址上升沿与地址下降沿指令转换为指令表形式:A M0.1A(A I0.0BLD 100FN M0.0)= Q0.0作业:把下面的梯形图转换为指令表A M 0.1 A(A I 0.0 BLD 100FN M 0.0 )A(O I 0.0 O I 0.1 )= L 20.0 A L 20.0 BLD 102= Q 0.0 A L 20.0 A I 0.2 = Q 0.1。
PLC步进指令及顺控程序设计

4、分支、汇合的组合流程 有些状态转移图是若干个或若干类分支、汇合流程的组合。有的分支、汇合的组合流程不能直接编程,需要转换后才能进行编程,如图,应将左图转换为可直接编程的右图形式。如图所示。
5、虚设状态 有一些分支、汇合组合的状态转图如图所示,它们连续地直接从汇合线转移到下一个分支线,而没有中间状态。这样的流程组合既不能直接编程,又不能采用上述办法先转换后编程。这时需在汇合线到分支线之间插入一个状态,以使状态转移图与前边所提到的标准图形结构相同。如图所示。
操作步骤
(1)连接3台电动机顺序启动控制电路。 (2)将编好的步进指令程序写入PLC。 (3)使PLC处于运行状态,并进入程序监控状态。 (4)PLC上输入继电器X0指示灯应点亮,表示热继电器和停止按钮连接正常。 (5)按下启动按钮SB2,第1台电动机启动;运行5s后,第2台电动机启动;M2运行15s后,第3台电动机启动。 (6)按下停止按钮SB1,3台电动机全部停机。
6、分支数的限定 FX2N系列 PLC中一条并行分支或选择性分支的电路数限定为8条以下;有多条并行分支与选择性分支时,每个初始状态的电路总数应小于等于16条,如图所示。
例:实现运料小车控制
任务引入
在多分支结构中,根据不同的转移条件来选择其中的某一个分支,就是选择流程模式。运料小车在左边装料处(X2限位)从a、b两种原料中选择一种装入,然后右行,自动将原料对应卸在A(X3限位)、B(X4限位)处,然后返回装料处,卸料时间20s。用开关X0的状态选择在何处卸料,当X0=1时,选择卸在A处;当X0=0时,选择卸在B处。
相关知识
将固定电压和频率的交流电变换为可变电压和频率的交流电的装置称为“变频器”。变频器首先将交流电变换为直流电,然后再将直流电变换为电压和频率可变的三相交流电去驱动三相异步电动机,由于异步电动机的转速与电源频率成正比,所以电动机可以平滑调速。 在变频器上通常都有主电路接线端和控制电路接线端。控制电路的功能可分为正反转方向控制以及低速、中速、高速控制等。例如,三菱FR-E540通用变频器的低速、中速、高速频率出厂设定值分别为10 Hz、30 Hz、50Hz。
2024秋期国家开放大学《可编程控制器应用实训》一平台在线形考(形成任务3)试题及答案

国家开放大学《可编程控制器应用实训》
一平台在线形考
形考任务3 答案
说明:资料整理于2024年10月16日;适用于2024秋期国家开放大学专科学员一平台在线形考考试。
可编程控制器应用实训形考任务三
实验目的:通过使用PLC的指令编程,并通过编程软件进行程序的编制、编译、调试相关的组态等工作,使学生掌握各类PLC指令的应用。
实验要求:1.根据功能控制要求,编写PLC程序,并通过编程软件进行程序的编制、编译、调试相关的组态等工作;
2.同一班级中,可按照个人或小组在指导教师的指导下进行选题。
实训内容
1.1 FX系列PLC简介
(1)FX系列PLC特点
FX系列可编程控制器是当前国内外新型的具有特色和代表性的微型PLC。
它由日本三菱电机公司研制开发的。
FX系列PLC基于“基本功能、高速处理、便于使用”的研发理念,使其具有数据传送与比较、四则运算与逻辑循环与移动等应用系统。
除此之外,还具有输入输出刷新、中断、高速计数器比较指令、高速脉冲输出等高速处理指令,以及在SFC控制方面,将机械控制的标准动作封装化的状态初始化指令等,使功能大大增强。
(2)FX系列PLC型号的含义
FX系列可编程控制器型号格式如图所示:
(3)硬件简介
①、上端子排
②、下端子排
③、串口
④、拨动开关
(4)FX系列PLC主要性能指标
200。
第6章 顺序控制梯形图的编程方式
1-6
PLC原理及应用 原理及应用
3、转换条件: 进入初始步的条件:M8002=1;T2=1。 进入初始步的条件:M8002=1;T2=1。 进入4秒步的条件:X0=1。 进入4秒步的条件:X0=1。 进入6秒步的条件:T0=1。 进入6秒步的条件:T0=1。 进入5秒步的条件:T1=1。 进入5秒步的条件:T1=1。 特别注意初始步的激活问题:用M8002的常开触点 特别注意初始步的激活问题:用M8002的常开触点 将初始步的编程元件置位。 4、各步的动作: 初始步的动作:Y0。 初始步的动作:Y0。 4秒步的动作:Y0、T0。 秒步的动作:Y0、T0。 6秒步的动作:Y1、T1。 秒步的动作:Y1、T1。 5秒步的动作:Y1、Y2、T2。 秒步的动作:Y1、Y2、T2。 二、根据分析画出时序图(见图6 所示) 二、根据分析画出时序图(见图6-2所示) 根据分析画出时序图
■
1-17
PLC原理及应用 原理及应用
三、跳步与循环次数的控制
S0
X04
相当 选择 分支
1、跳步(如图6-7所示) 、跳步(如图6 所示) 1)当S0处于活动状态,且X04=1时,将跳 处于活动状态, 04= 过S1步,由步S0进展到S2。称为正向跳步。 由步S 进展到S 称为正向跳步 正向跳步。 2)当S4处于活动状态,且X05=1时,将从 S4处于活动状态 处于活动状态, X05=1时 步S4返回到步S3。称为逆向跳步。 S4返回到步 。称为逆向跳步 返回到步S3 逆向跳步。 显然,跳步属于选择序列的一种特殊情况。 显然,跳步属于选择序列的一种特殊情况。 2、循环次数的控制 在设计梯形图时,经常遇到一些需要多次 重复的操作,此时可借助高级语言循环语句的 思想来设计顺序功能图和梯形图。逆向跳步
西门子PLCSTL编程小手册

输入继电器 I输出继电器Q通用辅助继电器位存储区M MB:字节 MW:字 MD:双字节特殊继电器SM变量存储器V VB:字节 VW:字 VD:双字节局部变量存储器L顺序控制继电器S定时器T TON:接通延时定时器 TONR:有记忆接通延时定时器 TOF:断开延时定时器计数器C模拟量输入映像寄存器AI模拟量输出映像寄存器AQ高速计数器HC累加器AC3. 指令集表布尔指令LD N 装载开始的常开触点LDI N 立即装载 LDN N 取反后装载开始的常闭触点LDNI N 取反后立即装载A N 与串联的常开触点AI N 立即与AN N 取反后与串联的常开触点ANI N 取反后立即与O N 或并联的常开触点OI N 立即或ON N 取反后或并联的常开触点ONI N 取反后立即与LDBx N1,N2装载字节比较结果N1x:<,<=,=,>=,>,<>=N2ABx N1,N2与字节比较结果N1x:<,<=,=,>=,>,<>=N2OBx N1,N2或字节比较结果N1x:<,<=,=,>=,>,<>=N2LDWx N1,N2装载字比较结果N1x:<,<=,=,>=,>,<>=N2AWx N1,N2与字节比较结果N1x:<,<=,=,>=,>,<>=N2OWx N1,N2或字比较结果N1x:<,<=,=,>=,>,<>=N2LDDx N1,N2装载双字比较结果N1x:<,<=,=,>=,>,<>=N2ADx N1,N2与双字比较结果N1x:<,<=,=,>=,>,<>=N2ODx N1,N2或双字比较结果N1x:<,<=,=,>=,>,<>=N2LDRx N1,N2装载实数比较结果N1x:<,<=,=,>=,>,<>=N2 ARx N1,N2与实数比较结果N1x:<,<=,=,>=,>,<>=N2 ORx N1,N2或实数比较结果N1x:<,<=,=,>=,>,<>=N2NOT 栈顶值取反EU上升沿检测ED 下降沿检测= N 赋值线圈=I N 立即赋值S S_BIT,N 置位一个区域R S_BIT,N 复位一个区域SI S_BIT,N 立即置位一个区域RI S_BIT,N 立即复位一个区域传送、移位、循环和填充指令MOVB IN,OUT 字节传送MOVW IN,OUT 字传送MOVD IN,OUT 双字传送MOVR IN,OUT 实数传送BIR IN,OUT 立即读取物理输入字节BIW IN,OUT 立即写物理输出字节BMB IN,OUT,N 字节块传送BMW IN,OUT,N 字块传送BMD IN,OUT,N 双字块传送SWAP IN 交换字节SHRB DATA,S_BIT,N 移位寄存器SRB OUT,N 字节右移N位SRW OUT,N 字右移N位SRD OUT,N 双字右移N位SLB OUT,N 字节左移N位SLW OUT,N 字左移N位SLD OUT,N 双字左移N位RRB OUT,N 字节右移N位RRW OUT,N 字右移N位RRD OUT,N 双字右移N位RLB OUT,N 字节左移N位RLW OUT,N 字左移N位RLD OUT,N 双字左移N位FILL IN,OUT,N 用指定的元素填充存储器空间逻辑操作ALD 电路块串联OLD 电路块并联LPS 入栈LRD 读栈LPP 出栈LDS 装载堆栈AENO对ENO进行与操作ANDB IN1,OUT 字节逻辑与ANDW IN1,OUT 字逻辑与ANDD IN1,OUT 双字逻辑与ORB IN1,OUT 字节逻辑或ORW IN1,OUT 字逻辑或ORD IN1,OUT 双字逻辑或XORB IN1,OUT 字节逻辑异或XORW IN1,OUT 字逻辑异或XORD IN1,OUT 双字逻辑异或INVB OUT 字节取反1的补码INVW OUT 字取反INVD OUT 双字取反表、查找和转换指令ATT TABLE,DATA 把数据加到表中LIFO TABLE,DATA 从表中取数据,后入先出FIFO TABLE,DATA 从表中取数据,先入先出FND= TBL,PATRN,INDXFND<> TBL,PATRN,INDXFND< TBL,PATRN,INDXFND> TBL,PATRN,INDX 在表中查找符合比较条件的数据BCDI OUT BCD码转换成整数 IBCD OUT 整数转换成BCD码BTI IN,OUT 字节转换成整数IBT IN,OUT 整数转换成字节ITD IN,OUT 整数转换成双整数TDI IN,OUT 双整数转换成整数DTR IN,OUT 双整数转换成实数TRUNC IN,OUT 实数四舍五入为双整数ROUND IN,OUT 实数截位取整为双整数ATH IN,OUT,LEN ASCII码→16进制数HTA IN,OUT,LEN 16进制数→ASCII码ITA IN,OUT,FMT 整数→ASCII码DTA IN,OUT,FMT 双整数→ASCII码RTA IN,OUT,FMT 实数→ASCII码DECO IN,OUT 译码ENCO IN,OUT 编码SEG IN,OUT7 段译码中断指令CRETI 从中断程序有条件返回ENI 允许中断DISI 禁止中断ATCH INT,EVENT 给事件分配中断程序 DTCH EVENT 解除中断事件通信指令XMT TABLE,PORT 自由端口发送RCV TABLE,PORT 自由端口接收NETR TABLE,PORT 网络读NETW TABLE,PORT 网络写GPA ADDR,PORT 获取端口地址SPA ADDR,PORT 设置端口地址高速计数器指令HDEF HSC,MODE 定义高速计数器模式HSC N 激活高速计数器PLS X 脉冲输出数学、加1减1指令+I IN1,OUT+D IN1,OUT+R IN1,OUT整数,双整数或实数法IN1+OUT=OUT-I IN1,OUT-D IN1,OUT-R IN1,OUT整数,双整数或实数法OUT-IN1 =OUTMUL IN1,OUTR IN1,OUTI IN1,OUTD IN1,OUT整数乘整数得双整数实数、整数或双整数乘法IN1×OUT=OUTMUL IN1,OUT/R IN1,OUT /I IN1,OUT /D IN1,OUT整数除整数得双整数实数、整数或双整数除法OUT/IN1=OUTSQRT IN,OUT 平方根LN IN,OUT 自然对数LXP IN,OUT 自然指数SIN IN,OUT 正弦COS IN,OUT 余弦TAN IN,OUT 正切INCB OUT 字节加1INCW OUT 字加1INCD OUT 双字加1DECB OUT 字节减1DECW OUT 字减1DECD OUT 双字减1PID Table,Loop PID回路定时器和计数器指令TON Txxx,PT 通电延时定时器TOF Txxx,PT 断电延时定时器TONR Txxx,PT 保持型通延时定时器CTU Txxx,PV 加计数器CTD Txxx,PV 减计数器CTUD Txxx,PV 加/减计数器实时时钟指令TODR T 读实时时钟TODW T 写实时时钟程序控制指令END 程序的条件结束STOP 切换到STOP模式WDR 看门狗复位300 msJMP N 跳到指定的标号LBL N 定义一个跳转的标号CALL NN1,… 调用子程序,可以有16个可选参数CRET 从子程序条件返回FOR INDX,INIT,FINAL NEXTFor/Next循环LSCR N 顺控继电器段的启动SCRT N 顺控继电器段的转换SCRE 顺控断电器段的结束通信指令指令描述NETR TBL,PORT 网络读NETW TBL,PORT 网络写XMT TBL,PORT 发送RCV TBL, PORT 接收GPA ADDR,PORT 读取口地址SPA ADDR,PORT 设置口地址TBL的定义VB10DAEO 错误码VB11 远程站点地址VB12 指向远程站点的数据区指针I,Q,M,V VB13 VB14 VB15 VB16数据长度1~16B VB17数据字节0 VB18数据字节1 VB32数据字节15。
电气控制与PLC第7-8次_顺序功能图(SFC)及常用功能指令
例1 大小球的选择传送控制—— 选择分支与汇合
1、大小球分捡装置
例1 大小球的选择传送控制—— 选择分支与汇合 2、I/O接线图
3
、 状 态 转 移 图 与 指 令 表
3
、 状 态 转 移 图 与 指 令 表
例2 交通灯控制——并行分支与汇合
一、动作流程: 二、控制要求:
1、当按下按钮X0时,信号灯按图示流程动作; 2、当按下停止按钮X1时,停止输出。
1. 在不同的步进段,允许有重号的输出(注意:状态号不能重 复使用)。如图(a)所示,表示Y2在S20和S21两个步进段都 接通,它与图(b)等效。
2. 在不相邻的步进段,允许使用同一地址编号的定时器(注意:
在相邻的步进段不能使用),如图所示。故对于一般的时间顺 序控制,只需2~3个定时器即可。
使用步进指令需要说明的问题(续2)
例2 交通灯控制——并行分支与汇合
三、I/O接线图: 四、编程
1、按双流程步进控制编程(并行分支与汇合,见下页) 2、按单流程步进控制编程(请学生自己完成)
交通灯按双流程步进控制编程(并行分支与汇合)
交通灯按双流程步进控制编程(并行分支与汇合)
例3 液压滑台的二次进给控制——互锁功能的实现
某机床的液压滑台需要进行二次进给控制,其动作过程、输 出元件的分配及状态转移图如图所示。
电气控制与PLC应用技术
—— 第5章 顺序功能图(SFC)及步进梯形图(STL)
本章主要内容
5.1 顺C及STL的编程规则 5.4 多流程顺序控制 5.5 SFC及STL的应用举例
基本概念
步进控制: 在多工步的控制中,按照一定的顺序分步 动作,即上一步动作结束后,下一步动作才开始。
步进指令及步进梯形图1
二、使用方法:
1、STL 仅对状态器动合触点起作用,且必须 与主母线直接连接。
2、STL指令完成的是步进功能,即一个状态 激活,前一个状态便自动复位。所以允许双 线、在时间顺序步进控制电路中,只要不是相 邻的步进工序,同一定时器课重复使用。
三、STL功能图与梯形图的转换
步进指令及梯形图
学习目标: 1、了解步进指令及使用方法 2、能对STL功能图与梯形图进行转换
意义:
采用步进指令进行编程,不仅可以大大简化 PLC的程序设计过程,降低编程的出错率, 还可以体统的控制的及时性。
一、1、STL 用于状态器动合触点的与母 线的连接,相当于母线右移。
2、RET 用于步进触点返回母线。 3、注意事项(1)STL仅对状态器S 有效。S用于步进功能时用双线触点 表示,用于一般辅助继电器时用单线 触点表示。(2)、STL 和RET配合 使用,表示步进功能的开始和结束。
1、注意初始歩的进入条件 (1)、一般由结束歩进入 (2)、初次上电用其他方法预先驱动初始歩。 2、一般状态的激活
必须在其他的状态后,先用SET置位,再用 STL驱动。
小结: 步进指令 STL RET 功能图与梯形图的转换
作业:P93 图4----40
任务三 十字路口交通灯的PLC控制

黄灯 HL3亮
2
当东西方向的红灯亮30s期间,南北方向的绿灯亮25s,后闪3次,共3s, 然后绿灯灭,接着南北方向的黄灯亮2s,完成了半个循环;再转换成南北 方向的红灯亮30s,在此期间,东西方向的绿灯亮25s,后闪3次,共3s,然 后绿灯灭,接着东西方向的黄灯亮2s,完成一个周期,进入下一个循环。
26
项目三 任务三 十字路口交通信号灯的PLC控制
27
考核内容 电路及
程序设计
安装与连线
调试与运行 安全操作
表3-16 任务考核表
考核要求
评分标准
配分 得分
(1)能正确分配I/O, 并绘制I/O接线图
(2)根据控制要求, 正确编制梯形图程序
(1)I/O分配错或少,每个扣5分 (2)I/O接线图设计不全或有错,每处扣5分 (3)三相异步电动机单向连续运行主电路表达不正确或 画法不规范,每处扣5分 (4)梯形图表达不正确或画法不规范,每处扣5分
Y元件编号
Y0 Y1 Y2 Y3 Y4 Y5
16
项目三 任务三 十字路口交通信号灯的PLC控制
图3-66 十字路口交通信号灯控制I/O接线图
图3-67 十字路口交通信号灯控制功能图
17
项目三 任务三 十字路口交通信号灯的PLC控制
➢ 编制程序
图3-68 十字路口交通信号灯控制梯形图
18
项目三 任务三 十字路口交通信号灯的PLC控制
40分 20分 20分
确保人身和设备安全 违反安全文明操作规程,扣10~20分
20分
合计
22
项目三 任务三 十字路口交通信号灯的PLC控制
… …
五、知识拓展
(一)部分重复的编程方法
三菱PLC顺序功能图(SFC)

选择分支与汇合流程
选择分 支流程不能 交叉,对左 图所示的流 程必须按右 边所示的流 程进行修改。
跳转流程
向下面状态 的直接转移或向 系列外的状态转 移被成为跳转,
用符号↓指向转 移的目标状态。
重复流程
向前面状 态进行转移的 流程称为重复。 用↓指向转移 的目标状态。 使用重复流程 可以实现一般 的重复,也可 以对当前状态 复位。
在起保停电路中,则应 将前级步M1和转换条件X1 对应的常开触点串联,作 为控制M2的起动电路。
闭触点与M2的线圈串联, 作为起保停电路的停止 电路。
梯形图可以用逻辑代数式 表示为:
M2=(M1·X1+M2)·/M3
右图是某小车运动 的示意图。设小车在 初始位置时停在右边, 限位开关X2为ON。按 下起动按钮X3后,小 车左行,碰到限位开 关X1时,变为右行; 返回限位开关X2处变 为左行,碰到限位开 关X0时,变为右行, 返回起始位置后停止 运动。
用LD或LDI指令设 置用转以O设移置用U设ST置条动TS指置LE动件作指T令状指作令设态令母开线始
正向跳步
逆向跳步
远程跳步
X0的常开触点下一次由 断开变为接通时,因为S20 是不活动步,没有执行图 中的第一条LDP M2800指令, S21的STL触点之后的触点 是M2800的线圈之后遇到的 第一个上升沿检测触点, 所以该触点闭合一个扫描 周期,系统由步S21转换到 步S22。
手
图起
控
保
制
停
系
电
统
路
自
设
动
计
控
的
制
自
的
动
顺
程
序
序
功
第5章 顺序控制梯形图的编程方法

系统在进入初始状态之前,还应将与顺序功能图的初始步对应的编程元
件置位,为转换的实现作好准备,并将其余各步对应的编程元件置为OFF状 态,这是因为在没有并行序列或并行序列未处于活动状态时,同时只能有一
个活动步。
在§5-1~§5-3节中,假设刚开始执行用户程序时,系统已处于要求的 初初始状态,除初始步之外其余各步对应的编程元件均为OFF。在程序中用
指令,X10为ON时跳步条件满足,将跳过自动程序,跳到标号P0处,执行手
动程序; X10为OFF时将执行自动程序,跳过手动程序。公用程序用于自动 程序和手动程序相互切换的处理,自动程序和手动程序都需要完成的任务可 以放在公用程序中。
② 子程序调用结构:如图5-2所示。子程序放在FEND(主程序结束)指 令之后,SRET指令表示子程序结束,将返回主程序。M8000的常开触点一
点下一次由断开变为接通时,因为S20是不活动步,没有执行图中的第一个
上升沿检测触点对应的指令,S21的STL触点之后的触点是M2800的线圈之 后遇到的它的第一个上升沿检测触点,所以该触点闭合一个扫描周期,系统
由步S21转换到步S22。
5.1.3 选择序列的编程方法
复杂的控制系统的顺序功能图由单序列、选择序列和并行序列组成,掌 握了选择序列和并行序列的编程方法,就可以将复杂的顺序功能图转换为梯 形图。
对选择序列和并行序列编程的关键在于对它们的分支与合并的处理,转
换实现的基本规则是设计复杂系统梯形图的基本准则。 图5-8中的3条运输带顺序相连,为了避免运送的物料在2号和3号运输带
上堆积,起动时应先起动下面的运输带,再起动上面的运输带。按下起动按
钮后,3号运输带开始运行,延时5s后2号运输带自动起动,再过5s后1号运
第五章顺序控制梯形图的编程方法
STL指令
FX系列PLC的步进顺控指令有两条:一条是步进触点(也叫 步进开始)指令STL(Step Ladder),一条是步进返回(也 叫步进结束)指令RET。
1.STL指令
STL步进触点指令用于“激活”某个状态,其梯形图符号
为
。
2.RET指令
RET指令用于返回主母线,其梯形图符号为
RET 。
7
44
设计思想
使用置位复位指令编程的顺序功能图与梯形图的对应关系。
M1 X1
M2
M1 X1 SET M2
RST M1
45
单序列的编程方法
M0 X0·X3
M1 M2
M3
M4
右行 左行 右行 左行
X000 X002 X000 X001 X000
46
选择序列的编程方法
单行道交通控制系统
红灯 X1
绿灯
X1 红灯 Y1
状态转移图(顺序功能图)的特点 STL指令及编程方法 STL指令的编程注意事项 单序列的编程方式 选择序列的编程方式 并行序列的编程方式
4
状态继电器
FX系列PLC的状态继电器
类别
初始状态
返回状态
一般状态
断电保持 状态
信号报警 状态
FX1S系列
S0~S9,10 点
S10~S19, 10点
合并:如某步之前有N个转换,则代表该步的辅助继电器 的起动电路由N条支路并联而成,各支路由某一前级步对 应的辅助继电器的常开触点与相应的转换条件对应的触点 或电路串联而成。
39
并行序列的编程方式
40
并行序列的编程方式
练习3: 用起保停电路的编程方法编写STL方法中的交通信号 灯控制系统。
(完整版)PLC顺序控制梯形图的编程方式汇总

X2 起动
M201
Y0
X0
M202
Y0
Y1 X0
M203
Y1
X1
M8002 M200 X2
M201 X0
M202 X0 X1
M203 T2
SET M200 SET M201 RST M200
SET M202 RST M201
SET M203 RST M202 PLS M100 SET M200 RST M203
补充:状态转移图
一个控制过程可以分为若干个阶段,这些阶 段称为状态。状态与状态之间由转换条件分 隔,相邻的状态具有不同的动作,当相邻两 状态之间的转换条件得到满足时,相邻状态 就实现转换,即上面的动作结束下面的动作 开始,描述这一状态转换过程的图就称为状 态转移图
状态器软器件S是构成状态转移图的基本元素, 共有1000点
用传送带传送长物体的控制 图如图所示。为了减少传送 带的运行时间,采用分段传 送方式。A、B为两条传送带, GK1、GK2为两个光电开关, 工作过程如下:按一下起动 按钮,A开始运行,B不运行; 当长物体前端靠近GK1时, A、B都运行;当长物体后端 离开GK1时,B运行,A不运 行;当长物体后端离开GK2 时,A、B都不运行。
SET M200
6.3.6各种编程方式的比较 1 编程方式的通用性 2 不同编程方式设计的程序长度比较 3 电路结构及其他方面的比较 STL指令的优点
6---4 具有多种工作方式的系统的编程方式
连续 (全自动循环运行)
自动
单周期 (间断周期运行) 单步 (自动运行试车)
手动
(1)调试 (2)自动参数的测定 (3)自动运行时突发情况的状态调整 (4)非标准操作
T1 T1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前器季 暂停 崩国坷圊 反转
sTL指令的出现意味着当前 sTL程序区的结束和新的
图l sTL指夸
sTL程序区的开始。各sTL触点驱动的电路一般放在一起,
最后一个s1L电路结束时一定要使用唧指令。RET指令
意味着最后一个sTL程序区的结束,LD点返回左侧母线。 pl:怎样对单序列蝙程? 答:旋转工作台用凸轮和限位开关来实现运动控制(见
条件同时满足。此时置位指令将后续步s21变为活动步,同
时系统程序自动地将s20复位为不活动步。需要从某一步返 回初始步时,可对初始步对
应的状态继电器使用0uT指 令或sET指令。
问.RET指争有什盖作 Jfl o
l|
正转
与sn,触点相连的触点 应使用LD或LDI指令,即LD 点移到sTL触点的右侧,该 点成为临时母线。下一条
然后压钳下行。压紧板 料后,压力继电器x4为
1状态,压钳保持压紧,剪刀开始下行。剪断扳料后,x2变
为1状态。为了提高效率,压钳和剪7J同时上行。它们分别
碰到限位开关x0和x1后,分别停止上行,均停止后,又开
始下一周期的工作。剪完lO块料后停止工作,并停留在初始
状态。
系统的顺序功能图和梯形图如图4所示,步s0是初始
问:为什幺使用sTL指令时允许双线圈电路7 答:由于cPu只执行活动步对应的sTL电路块,使用 s1L指令时允许双线圈输出,印不同的s下L触点可以分别驱 动同一编程元件的一个线圈。 问:怎样对选择序列骗程?
板料 .
作过程如n首先板料
万z72727zi广r气)(3 右行至限位开关x3处,
图3剪板机示意图
问 怎样对并行序列编程? 图4中分别由s23、s24和s25、s26组成的两个单序列 是并行工作的,设计梯形图时应保证这两个序列同时开始工 作和同时结束,即两个序列的第一步s23和s25应同时变为 括动步,两个序列的最后一步s24和s26应同时变为不活动 步。并行序列的分支的处理很简单,在图4中,当步s22是 活动步,并且转换条件x2满足时,步s23和s25同时变为活 动步。在梯形图中,当s22的sTL触点和x2的常开触点均 接通时,s23和s25被两条sET指令同时置位,系统程序将 前级步s22复位为不括动步。步s24、s26是等待步,用来同 时结束两个并行序列。图4中水平双线之下的转换条件“=r 表示转换条件总是满足的,即只要步s24、s26都是活动步, 就会发生步s24,s26到步s27的转换.步s24、s26变为不 活动步,步s27变为活动步。在梯形图中,用s24、s26的sTL 触点组成的串联电路使s27置位。如果不涉及并行序列的合 并,同一状态继电器的sTL触点只能在梯形图中使用~次, 并且只能作为电路的起始触点。串联的sTL触点的个数不能
PLc应用知识问答(11)
重庆大学电气工程学院 枣常初
使用STL指令 的PLC顺序控制编程方法
三菱公司PLc的sTL指令很容易掌握,设计 的程序短,设计顺序控制梯形图的方法用于复杂 系统的梯形图设计可以节约大量的时间。
汛S20
0UT Y5
LⅡX4
SEr
S2
问:怎样用s丁L指令求编写PLc的顺序控制程序’
负载的驱动处理、指定转换条件和指定转换目标。汛触点
一般是与左侧母线相连的常开触点,当某一步为活动步时,
对应的sTL触点接通,它右边的电路被处理,直到下一步变
为括动步。图l中s20的sTL触点闭台后,Y5的线圈通电。 s20的sTL触点和)(4的常开触点组成的串联电路代表了转
换实现的两个条件,若两个触点同时闭合,转换实现的两个
的sTL触点开始的电路块中应有N条分别指明各转换条件和
转换目标的电路。例如步s27之后有两个转换条件,可能转
换到步s0和步s20,在s27的sTL触点开始的电路块中,有
控制技术l_昼雹巨冒一
芦坠—圃
悍辟肖-■LL—芦——芦————q压①①匝囹鞘强醐囹右勰T”行
■户—匝Ⅱ固
隹肖二—g絮画行
面
c0巳剪完lo块
答:步进梯形指令(step Ladder Ins劬cⅡl状态)简称为 sTL指令,与sTL指令配套的还有一条使它复位的RET指
令。sTL指令与状态继电器一起使用。s0一S9用于初始步, slo~s19用于自动返回原点。使用sTL指令的状态继电器
的常开触点称为sTL触点,图l给出了顺序功能图与梯形图
之间的对应关系,sTL触点驱动的电路块有三个功能,即对
超过8个,即一个并行序列中的序列数不能超过8个。弘
万方数据
电号孵代2004年第2期l 83
图2)。在初始状态时左限位开关x3为l状态,按下起动按 钮X0,Y0变为l状态,电动机驱动工作台沿顺时针正转,转 到右限位开关x4所在位置时暂停5s(用T0定时),定时时间 到时,Y1变为1状态,工作台反转,回到限位开关x3所在 的初始位置时停止转动,系统回到初始状态。PLc上电时初 始化脉冲M8002的常开触点闭合一个扫描周期,将初始步s0 置为活动步。若此时按下起动按钮x0,置位指令将后续步 s20置为话动步,同时s0被系统程序自动复位。
脒… j!跚罕}■■——畔—尸—PL叫————压——亘亘—匝—五①国①囹咽团《目镕w±t#H
早—=J④Ⅲ
bP—⑥
图4剪图4中步s20之前有一个 由两条支路组成的选择序歹Ⅱ的合并,s20有两个前级步s0和 s27。在梯形图中,由s0和s27的sTL触点驱动的电路块中 均有转换目标s20。只要正确地确定每一步的转换条件和转 换目标,就能“自然地”实现选择序列的合并。
s20的sTL触点闭合后,Y0的线圈通电,工作台正转。
S1L S22
LD
X3
0UT
s0
RⅡ
山E;E|山河E|邮∞时E|唧 ∞皇i 删轴舳舶舌;吞i如H铋锄邛瑚珊£i
图2顺序功能图与梯形图
82 l电气时代2004年第2期
万方数据
限位开关x4动作时,转换条件满足,下一步的状态继电器 s2l被置位,进入暂停步,系统将这样一步一步地工作下去. 在最后一步,工作台反转,返回限位开关x3所在的位置时, 用OuT s0指令使初始步对应的sO变为1状态并保持,系 统返回并停止在初始步。
步,cO用来控制剪料的次数,每剪完一块饭料,co的当前
值加J。s27之后有一个选择系列的分支,没有势完Jo块料
时,c0的当前值小于设定值10,其常闭触点闭合,转换条
件满足,将返回s20步。剪完10块料后,c0的当前值等干
设定值,其常开触点闭合,转换条件cO满足,将返回初始
步s0。如果在某一步的后面有N条选择序列的分支,则该步