智能车北京科技大学天津学院-二队c
创意组名奇葩
创意组名奇葩篇一:创意组前十名公布第五届全国大学生飞思卡尔杯智能汽车大赛创意组前10名公布发布时间:20xx年08月21日 22:28:41所属赛区:华东赛区1 同济大学同济方舟同济大学_抗震救灾智能自动架桥救险车2 北京科技大学创意队北京科技大学_基于遥感图像导航的复杂地形自适应智能车演示系统3 西北工业大学众志成城西北工业大学_多功能抗震救灾车4 湖北汽车工业学院东风之子湖北汽车工业学院_开路先锋5 杭州电子科技大学搜救之星杭州电子科技大学_搜救急先锋6 哈尔滨工程大学工程之星哈尔滨工程大学_辅助搜救机器人7 上海交通大学 CyberSmart 上海交通大学_基于车联网技术的救灾物资智能运输系统8 成都信息工程学院 C.K 成都信息工程学院_智能浇花车9 广东技术师范学院探索者广东技术师范学院_探索机器人10 大连理工大学狩猎者大连理工大学_智能救援车篇二:创意命名组創意命名組篇三:收集一组创意表达一、收集一组创意表达这是一组关于禁烟的海报,他们或诙谐、或恐怖,但都深刻地告诉了人们主题:健康生活,远离烟草。
创意概念:把吸烟的危害,形象化,给人以视觉的冲击创意表达:平面海报二、尝试对某一概念形成10组以上的表达。
概念:爱情1、爱情就像冬日里的棉袄。
2、爱情就像一场春雨。
13、爱情就像夏日里的一阵威风。
4、爱情就像一朵含苞欲放的玫瑰。
5、爱情就像一曲天籁之音。
6、爱情就像一副隽永的工笔画。
7、爱情就像一股涓涓细流。
8、爱情就是灰太狼与红太狼。
9、爱情就是张汉卿与赵四小姐,一起相伴终生。
10、爱情就是我与你,相濡以沫,相敬如宾。
三、开一家你心目中的创意饭店、咖啡馆、书吧、皮具店、服装店、饰品店、玩具店,让这里的物质具有某种精神内涵。
我想开一家书吧。
人类的祖先留给我们许许多多的精神文化,我想开家书吧,让人们能真实地去享受这些精神盛宴。
我这家书吧分为几块,武侠,军事,爱情文学,历史等,我把我的店面分成上诉几个部分,给每个部分分别赋予上诉几个主题。
车辆工程排名
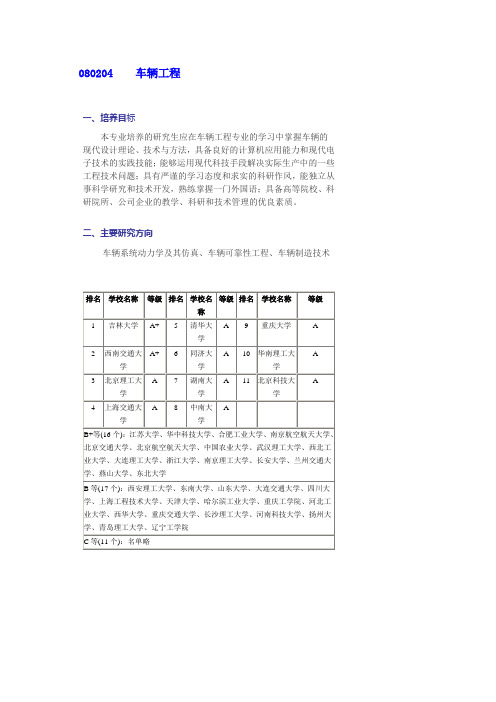
080204 车辆工程一、培养目标本专业培养的研究生应在车辆工程专业的学习中掌握车辆的现代设计理论、技术与方法,具备良好的计算机应用能力和现代电子技术的实践技能;能够运用现代科技手段解决实际生产中的一些工程技术问题;具有严谨的学习态度和求实的科研作风,能独立从事科学研究和技术开发,熟练掌握一门外国语;具备高等院校、科研院所、公司企业的教学、科研和技术管理的优良素质。
二、主要研究方向车辆系统动力学及其仿真、车辆可靠性工程、车辆制造技术北京交通大学--机械与电子控制工程学院-- 车辆工程北京理工大学--机械与车辆工程学院-- 车辆工程北京科技大学--土木与环境工程学院-- 车辆工程天津大学--机械工程学院-- 车辆工程中国农业大学--工学院-- 车辆工程北京林业大学--工学院-- 车辆工程天津科技大学--机械工程学院-- 车辆工程燕山大学--车辆与能源学院-- 车辆工程太原理工大学--机械工程学院、机械电子研究所-- 车辆工程大连理工大学--车辆工程-- 车辆工程东北大学--机械工程与自动化学院-- 车辆工程辽宁工学院--汽车与交通工程学院-- 车辆工程沈阳工业大学--机械工程学院-- 车辆工程沈阳理工大学--汽车与交通学院-- 车辆工程吉林大学--汽车工程学院-- 车辆工程哈尔滨工程大学--机电工程学院-- 车辆工程大庆石油学院--机械科学与工程学院-- 车辆工程上海交通大学--机械与动力工程学院-- 车辆工程上海理工大学--机械工程学院-- 车辆工程同济大学--中德学院-- 车辆工程同济大学--汽车学院-- 车辆工程安徽农业大学--工学院-- 车辆工程合肥工业大学--机械与汽车工程学院-- 车辆工程福州大学--机械工程及自动化学院-- 车辆工程广东工业大学--机电工程学院-- 车辆工程华南理工大学--汽车工程学院-- 车辆工程华南农业大学--工学-- 车辆工程河南科技大学--车辆与动力工程学院-- 车辆工程华北水利水电学院--专业列表-- 车辆工程郑州大学--机械工程学院-- 车辆工程华中科技大学--机械学院-- 车辆工程武汉科技大学--机械自动化学院-- 车辆工程四川省社会科学院--汽车工程学院-- 车辆工程长沙理工大学--汽车与机械工程学院-- 车辆工程中南大学--机电工程学院-- 车辆工程华东交通大学--机电工程学院-- 车辆工程江西理工大学--机电工程学院-- 车辆工程青岛大学--电工程学院-- 车辆工程青岛科技大学--机电学院-- 车辆工程青岛理工大学--汽车与交通工程学院-- 车辆工程山东大学--机械工程学院-- 车辆工程山东科技大学--机械电子工程学院-- 车辆工程山东理工大学--交通与车辆工程学院-- 车辆工程华西大学--交通与汽车工程学院-- 车辆工程四川大学--制造科学与工程学院-- 车辆工程西南交通大学--机械工程学院-- 车辆工程西南交通大学--牵引动力国家重点实验室-- 车辆工程昆明理工大学--机电工程学院-- 车辆工程重庆大学--机械工程学院-- 车辆工程重庆工学院--重庆汽车学院-- 车辆工程重庆交通大学--机电与汽车工程学院-- 车辆工程兰州交通大学--机电工程学院-- 车辆工程兰州理工大学--机电工程学院-- 车辆工程贵州大学--机械工程学院-- 车辆工程长安大学--汽车学院-- 车辆工程西安工业大学--西安工业大学-- 车辆工程西安建筑科技大学--机电工程学院-- 车西安交通大学--机械工程学院-- 车辆工程西安科技大学--机械工程学院-- 车辆工程西安理工大学--机械与精密仪器工程学院-- 车辆工程西北工业大学--机电学院-- 车辆工程东南大学--机械工程系-- 车辆工程解放军理工大学--工程兵工程学院-- 车辆工程南京航天航空大学--能源与动力学院-- 车辆工程南京理工大学--机械工程学院-- 车辆工程中国矿业大学--机电与信息工程学院-- 车辆工程浙江大学--机械与能源工程学院-- 车辆工程浙江工业大学--机电工程学院-- 车辆工程浙江理工大学--机械与自动控制学院-- 车辆工程石家庄铁道学院--石家庄铁道学院-- 车辆工程北京航空航天大学--交通科学与工程学院-- 车辆工程武汉理工大学--汽车工程学院-- 车辆工程。
北京高考征集志愿的招生院校2023
北京高考征集志愿的招生院校2023北京高考征集志愿的招生院校名单20231010北京体育大学1人{07} 不限选考科目(中外合作办学专业):71 旅游管理(中外合作办学) 1人 (学费待定)〔以上专业高收费专业,教学地点为海南陵水黎安国际教育创新试验区。
外语单科成绩不低于112分〕1029中国农业大学1人{02} 物理(必须选考):26 水利类 1人 (5000元)〔以上专业含农业水利工程、水利水电工程、能源与动力工程、农业建筑环境与能源工程、土木工程〕1061中华女子学院1人{01} 不限选考科目:1A 家庭教育(女) 1人 (4200元)〔以上专业只招女生;办学地点:第一年在北校区,第二、三、四年在校本部〕1090首都师范大学科德学院36人{01} 不限选考科目:10 学前教育 9人 (79800元)11 会展经济与管理(大数据传播) 10人 (79800元,北京市一流本科建设专业)12 汉语言文学 9人 (79800元)13 小学教育 8人 (79800元)〔以上专业录取时满足考生第一志愿专业;学校致力于培养具有国际化思维和全球化视野的精英学子,学校同美国、英国、加拿大、澳大利亚等10多个国家的近100所高校达成合作,建起与海外知名高校的沟通桥梁,为学校在校生提供海外升硕的保障。
通过雅思分层教学,海外名校激励,留学生涯规划,背景提升优化,一对一导师全程指导等策略助力学生牵手世界名校,实现“国内本科+国外硕士”的无缝对接;办学地点:大兴区〕1091北京工商大学嘉华学院193人{01} 不限选考科目:10 金融学 18人 (79800元)11 金融科技 19人 (79800元)12 数字经济 15人 (79800元)13 会计学 10人 (79800元)14 财务管理 15人 (79800元)15 金融工程 15人 (79800元)16 国际商务 18人 (79800元){02} 物理(必须选考):20 大数据管理与应用 15人 (79800元)21 计算机科学与技术 27人 (79800元)22 数据科学与大数据技术 25人 (79800元)〔以上专业学校与英、美、澳、加等11个国家59所海外名校建立合作开设本硕联合培养项目,考生可自愿报名。
北京科技大学
第十一届“恩智浦”杯全国大学生智能汽车竞赛技术报告学校:北京科技大学队伍名称:北京科技大学创意组参赛队员:刘庆旭、王昊、李新乐高伟晋、张硕带队教师:杨珏、孟宇引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
智能车技术依托于智能控制,前景广阔且发展迅速。
目前,掌握着汽车工业关键技术的发达国家已经开发了许多智能车的实验平台和商品化的车辆辅助驾驶系统。
有研究认为智能汽车作为一种全新的汽车概念和汽车产品,在不久的将来会成为汽车生产和汽车市场的主流产品。
在智能硬件、工业4.0革命兴起的同时,节能环保也受到人们越来越多的关注。
我们所设计制作的创意组智能车,在A车模的基础上做了改进,中间安放两个铜轮从铝膜上取电,编码器检测电机转速,利用线圈实现智能车对赛道信息的感知,进而控制车身姿态,实现车模沿赛道稳定的行驶。
本技术报告主要包括机械系统、硬件系统、软件系统等,详尽地阐述了我们的设计方案,具体表现在硬件电路的创新设计以及控制算法的独特想法。
智能车的制作过程包含着我们的团结协作、坚持不懈、辛勤努力,这份报告凝聚了我们的智慧与汗水,是我们团队共同努力的成果。
在准备比赛的过程中,我们小组成员认真学习控制、传感器技术、汽车电子、电气、计算机、机械等多个学科,几个月来的经历,培养了我们电路设计、软件编程、系统调试等方面的能力,锻炼了我们知识融合、实践动手的能力,最重要的是锻炼了我们的心志,面对困难,大家团结一致不退缩,一定会解决问题的,这些对我们今后的学习工作都有着重大的实际意义。
目录引言 ...................................................................................................... - 1 -目录 ...................................................................................................... - 3 -第一章方案设计................................................................................. - 6 -1.1系统总体方案的设计 ........................................................................ - 6 -1.2系统总体方案设计图 ........................................................................ - 7 -第二章机械系统设计及实现............................................................... - 8 -2.1车模设计与搭建 ................................................................................ - 8 -2.2车模整体布局 .................................................................................... - 8 -2.3智能车前轮定位的调整 .................................................................... - 9 -2.3.1主销后倾角 ............................................................................ - 9 -2.3.2主销内倾角 .......................................................................... - 10 -2.3.3车轮外倾角 .......................................................................... - 10 -2.3.4 前轮前束 ............................................................................. - 11 -2.4智能车转向机构调整优化 .............................................................. - 11 -2.5智能车重心位置的调整 .................................................................. - 13 -2.6其他机械结构的调整 ...................................................................... - 13 -第三章电路设计说明........................................................................ - 14 -3.1 主控板和驱动板的硬件设计 ......................................................... - 14 -3.1.1 电源管理模块 ..................................................................... - 14 -3.1.2 电机驱动模块 ..................................................................... - 14 -3.1.3 数模转换模块 ..................................................................... - 15 -3.1.4单片机及其他电路部分设计 ............................................. - 16 -3.2 智能车传感器模块设计 ................................................................. - 19 -3.2.1金属传感器的原理 .............................................................. - 19 -3.3、智能车存取电部分 ....................................................................... - 23 -第四章智能车控制软件设计说明...................................................... - 26 -4.1底层初始化 ...................................................................................... - 26 -4.2传感器采集处理算法 ...................................................................... - 26 -4.3寻线行驶算法实现 .......................................................................... - 28 -4.3.1定位算法 .............................................................................. - 28 -4.3.2基于模糊控制的方向控制 .................................................. - 28 -4.3.3基于增量式PID的速度控制 .............................................. - 28 -4.4弯道策略分析 .................................................................................. - 30 -第五章开发工具、制作、安装、调试过程说明 ................................ - 32 -5.1 开发工具 ......................................................................................... - 32 -5.2 调试过程 ......................................................................................... - 32 -5.2.1上位机调试系统 .................................................................. - 32 -5.2.2控制算法的参数整定 .......................................................... - 33 -5.3 整车机械方面的调整 ..................................................................... - 33 -第六章模型车的主要技术参数说明 .................................................. - 34 -结论................................................................................................. - 37 -参考文献............................................................................................. - 39 -附录程序源代码 (I)- 6 -第一章 方案设计本章主要简要地介绍智能车系统总体设计思路,在后面的章节中将整个系统分为机械结构、控制模块、控制算法等三部分对智能车控制系统进行深入的介绍分析。
基于WSN的无人智能停车管理系统设计
SOFTWARE 软 件2021第42卷 第3期2021年Vol. 42, No.30 引言近年来,随着人们生活水平的提高,汽车数量的增长速度更是惊人。
由于我国城市对停车问题的认识滞后于车辆增长速度,所以导致了停车发展设施规划滞后,停车管理水平低、有关法律体系尚不健全等状况的出现。
无论是居住区、商业区、还是在城市道路两侧,停车位缺乏的现象比比皆是,乱停乱放现象非常严重。
针对于市面上智停车难管理和产品单一的问题,设计了一款基于WSN 的无人智能停车管理系统,本系统由上位机和下位机组成,下位机采用物联网技术之一的ZigBee 技术进行组网,采用STM32单片机作为主控制芯片搭载ZigBee 无线通信模块的CC2530,板载ZigBee 无线通信天线,下位机实现对汽车停放的检测,通过红外传感器进行检测并上传数据到终端节点,并可以通过OLED 液晶显示屏进行车位信息的显示。
上位机通过设计PC 端上位机管理界面,实现后台对停车场作者简介:王建亮(1983―),硕士,高级工程师,研究方向:电子信息及物联网、智能科技;魏也(1987―),博士,讲师,研究方向:电路与系统 。
基于WSN 的无人智能停车管理系统设计王建亮1,2 潘喆2 魏也3(1.北京科技大学天津学院,天津 301830;2.天津理工大学中环信息学院,天津 300380;3.中国民航大学,天津 300300)摘 要:随着人们对停车场的使用率越来越高,停车管理系统智能化需求也越来越高。
通过实现智能化和网络化管理能够预定和査看多个停车场的车位情况,最终实现想停就停的方案,是停车场管理系统的最终目标。
本设计是基于WSN 的无人智能停车管理系统,上位机通过C#进行上位机管理系统的编写,对下位机ZigBee 传来的数据进行实时监测,通过ZigBee 无线的方式,接收终端节点上的车辆信息数据。
ZigBee 模块主要以STM32单片机为主控制芯片搭载ZigBee 模块作为ZigBee 节点,系统由协调器节点和终端节点两部分组成,终端节点上搭载红外传感器对车辆进行停放与否的监测,实现了停车场的智能管理和精准使用。
摄像头组-北京科技大学CCD-技术报告
第七届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:北京科技大学队伍名称:北京科技大学摄像头一队参赛队员:刘珂屹舒伯特徐国强带队教师:关于技术报告和研究论文使用授权的说明本人完全了解第七届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要本文设计的智能车系统以MK60N512VMD100微控制器为核心控制单元,通过CMOS摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值化,提取黑色引导线,用于赛道识别;通过光电编码器检测模型车的实时速度,使用PID控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
为了提高模型车的速度和稳定性,使用C#、MFC上位机、SD卡模块、键盘模块等调试工具,进行了大量硬件与软件测试。
实验结果表明,该系统设计方案确实可行。
关键字:MK60N512VMD100,CMOS,PID,C#,SD卡AbstractIn this paper we will design a smart car system based on MK60N512VMD100as the micro-controller unit. We use a CMOS image sensor to obtain lane image information. Then convert the original image into the binary image by the analog comparator circuit in order to extract black guide line for track identification. An inferred sensor is used to measure the car`s moving speed. We use PID control method to adjust the rotate speed of driving electromotor and direction of steering electromotor, to achieve the closed-loop control for the speed and direction. In order to increase the speed and the reliability of the car, a great number of the hardware and software tests are carried on and the advantages and disadvantages of the different schemes are compared by using the C#、MFC simulation platform, SD card module and the keyboard module. The results indicate that our design scheme of the smart car system is feasible.Keywords: MK60N512VMD100,CMOS,PID,C#,SD card目录摘要 (III)Abstract......................................................................................................................... I V 目录.. (V)引言 (1)第一章系统总体设计 (2)1.1系统概述 (2)1.2整车布局 (3)第二章机械系统设计及实现 (4)2.1车体机械建模 (4)2.2前轮倾角的调整 (4)2.3底盘高度的调整 (5)2.4编码器的安装 (5)2.5舵机安装结构的调整 (5)2.6舵机转角分析 (6)2.7摄像头的安装 (8)第三章硬件系统设计及实现 (11)3.1硬件设计方案 (11)3.2传感器的选择 (11)3.2.1摄像头 (11)3.2.2编码器 (13)3.3电路设计方案 (14)3.3.1单片机最小系统板 (15)3.3.2电源稳压电路及检测电路 (16)3.3.3图像处理电路 (17)3.3.4电机驱动电路 (18)3.3.5舵机接口电路 (19)3.3.6键盘拨码电路 (19)第四章软件系统设计及实现 (21)4.1赛道中心线提取及优化处理 (21)4.1.1原始图像的特点 (21)4.1.2赛道边沿提取 (22)4.1.3图像校正 (24)4.1.4推算中心 (26)4.1.5路径选择 (27)4.2 PID 控制算法介绍 (28)4.2.1位置式PID (29)4.2.2增量式PID (29)4.2.3 PID参数整定 (30)4.3转向舵机的PID控制算法 (30)4.4驱动电机的PID控制算法 (32)第五章系统开发及调试工具 (34)5.1开发工具 (34)5.2上位机图像显示 (34)5.2.1C#静态上位机 (34)5.2.2 MFC SD卡上位机 (35)5.3SD卡模块 (38)5.3.1SD卡介绍 (38)5.3.2 SPI总线介绍 (38)5.3.3软件实现 (39)5.4键盘模块 (40)第六章模型车的主要技术参数 (41)结论 (42)参考文献 (I)附录:程序源代码 (II)引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
《智能小车概述》PPT课件

•
三、CPU/MCU接口技术:外围的与程序接口例如:IIC总线、SPI总线……
•
四、PCB制板技术: 基本的2层板与4层板的制作,EMI和EDS的干扰避免
•
五、VHDL与Verilog HDL等给予硬件的软件设计
3) 智能车对于硬件的要求:
一、熟悉2层电路板的绘制:Protel、 Altium Designer 并合理布局(EMI) 二、数字电路与模拟电路的处理
• 解剖智能车 1) Laser 2) CCD/CMOS 3) electromagnetism
• 学做智能车
总体介绍
•汽车动态分析 •车速控制系统 •方向控制系统 •赛道检测系统 •电子控制系统 •策略规划系统 •行为决策系统 •路况记忆系统 •数据传输系统
基于蓝牙控制的多功能智能小车背景研究及意义
基于蓝牙控制的多功能智能小车背景研究及意义发表时间:2020-12-03T12:30:52.090Z 来源:《科学与技术》2020年第21期作者:李季缘胡嘉敏李倩雯王铭萱[导读] 科技的进步使智能机器人走到社会的各个行业,像军事应用、工业制造、生活服务等方面,智能机器人都发挥了不可或缺的作用。
而这其中,多功能智能车逐渐成为主流李季缘胡嘉敏李倩雯王铭萱西安工程大学科技的进步使智能机器人走到社会的各个行业,像军事应用、工业制造、生活服务等方面,智能机器人都发挥了不可或缺的作用。
而这其中,多功能智能车逐渐成为主流,同时也带动了自动控制领域研究的热潮。
智能车辆又叫无人车辆,它将车辆控制工程、人工智能化、自动控制、传感器技术综合在一起,是未来智能汽车发展的模型。
智能小车具备重心偏低、操作容易、体积小的优势,这也使它在未来大规模的使用奠定了基础。
智能小车的主要特点是在复杂的道路环境中能够自动控制方向、沿着规划的路线行进。
在这里,传感器技术起到了至关重要的作用,传感器利用侦查到的周围环境信息,让小车具备了一定自我适应的能力,使小车在特定的指令下完成对应的动作。
就现在的情况看,智能小车大部分能够完成自我识别障碍物以及自动保持安全距离的功能。
但随着小车在生产生活中越来越多的应用,需要解决的问题也会变得多,遇到的情况也会越来越不好解决,整个社会也会对智能小车的整体性能提出更高更好的要求,这也使得智能小车的研究得到了更多人的关注。
近几年,在避障算法、避障策略、蓝牙无线控制技术等技术的融合下使得智能小车在循迹避障方面取得了进步,提高了智能小车避障的准确性。
在智能小车循迹避障功能方面,通常复杂的环境下,也可以自主高效的实现循迹前进和途中避障。
这里的关键部分是智能小车能在特定环境下识别出行进路线以及沿途障碍物的相关参数信息,然后循迹避障系统通过传感器采集的信息完成循迹避障的动作。
在智能化日益完善的今天,人们的的方方面面都已经无法离开智能小车所带来的便利。
飞思卡尔杯全国大学生智能汽车邀请赛北理风行者车队技术报告
速度检测模块由 S12 的增强型捕捉计数模块、传感器和外围电路组成,通过 检测赛车的实时车速为赛车的车速控制提供控制量。
2.3 智能车系统软件结构设计
如果说系统硬件对于智能车来说是它的骨架和躯体,那么软件算法就是它的 思想。软件算法的优劣直接体现了智能车辆的“智能”高低。所以软件系统对于智 能车来说至关重要。 首先,赛车系统通过路径识别模块获取前方黑色引导线的信息, 同时通过速度检测模块实时获取赛车的速度。 利用连续路径识别算法求得赛车与黑 线位置的偏差,接着采用 P 方法对舵机进行控制,根据检测到的实时车速,结合模 糊控制策略对赛车速度进行恰当的控制调整,使赛车在符合比赛规则情况下沿赛道
50cm 316mm 172m 18/76
图 3.1 模型车的底盘结构
3.2 智能车运动学状态方程
在只考虑车辆的平面运动情况下,当转向时,车辆只做平面运动及平面旋转 运动,如图 3.2、3.3 所示。
Vf Vr
w
L
图 3.2 小车转向示意图
R
L
图 3.3 转向平面图
2 w
Vr
由角速度的定义可知
TR
以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实践活 动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综合,而结 果属性很可能是创造。通过竞赛,参赛的同学们培养了对已学过的基础与专业理论 知识与实验的综合运用的能力;带着背景对象中的各种新问题,学习控制、模式识 别、传感技术、电子、电气、计算机、机械等多个学科新知识,包括来自不同学科 背景大学生的相互学习,逐渐学会了在学科交叉、集成基础上的综合运用;若是以 实用为目的,还必须考虑考虑可靠性、寿命、外观工业设计、集成科学与非科学, 在具体约束条件下融合形成整体的综合运用。这样的训练是很有意义的。
第三届全国大学生“飞思卡尔”杯智能汽车竞赛
百度文库-东北师范大学
2009年第四届全国大学生“飞思卡尔”杯智能汽车竞赛
获奖名单
一、组织贡献奖
全国总决赛承办学校北京科技大学
东北赛区承办学校吉林大学
华北赛区承办学校北京科技大学
华东赛区承办学校杭州电子科技大学
华南赛区承办学校华南理工大学
西部赛区承办学校西北工业大学
二、优秀论文奖(共26篇)
北京科技大学北京科技大学CCD2队北京科技大学天津学院雷霆二队
北京科技大学中冶一队
清华大学三角洲队光电队
天津工业大学天津工业大学一队
长安大学长大二队
电子科技大学成电飞扬
西安交通大学绝尘队
西北工业大学翱翔队
西北师范大学瞬之队
华中科技大学华中科技大学一队
武汉科技大学首安四队
中南民族大学AE86队
湖北汽车工业学院惠捷二号
华南理工大学疾速队
东北大学龙腾队
东北大学猎豹
东北师范大学东师电子一队
吉林大学爱德队
东北大学秦皇岛分校东秦3队
杭州电子科技大学钱江1号
上海交通大学SmartStar
同济大学Raceking
南京师范大学先驱者
安徽大学风行者
杭电科技大信息工程学院超越者队
六、优秀奖(共15支队伍)
七、创意组。
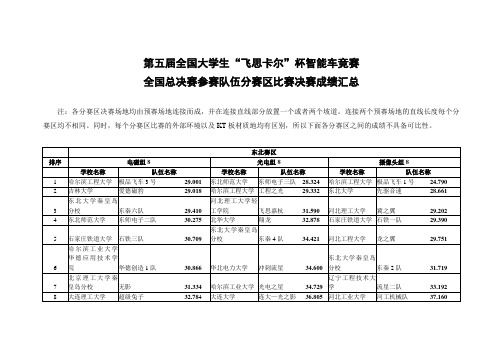
第五届全国大学生“飞思卡尔”杯智能车竞赛决赛成绩汇总
华硕二队25.266
8
上海电力学院
电自二队30.211
江苏科技大学
鹰之歌32.969
浙江理工大学
天速星27.760
9
浙江师范大学
低空飞翔30.533
河海大学
荷风33.914
南京理工大学
南理工摄像头1队27.870
10
南京理工大学
南理工电磁1队30.758
三江学院
三电二队34.627
河海大学常州校区
9
华北赛区
电磁组8
光电组9
摄像头组8
学校名称
队伍名称
学校名称
队伍名称
学校名称
队伍名称
1
北京理工大学
星际航行者24.101
北京科技大学
北京科技大学
光电一队22.051
北京科技大学
北京科技大学
摄像头一队21.405
2
天津工业大学
天津工业大学
磁导航一队25.830
北京科技大学天津学院
战鹰队25.370
北京科技大学天津学院
华德创造1队30.866
华北电力大学
冲刺流星34.600
东北大学秦皇岛分校
东秦2队31.719
7
北京理工大学秦皇岛分校
无影31.334
哈尔滨工业大学
光电之星34.729
辽宁工程技术大学
流星二队33.192
8
大连理工大学
超级兔子32.784
大连大学
连大—光之影36.805
河北工业大学
河工机械队37.160
西部赛区
电磁组9
光电组8
摄像头组9
学校名称
队伍名称
天津学院急速奇侠光电
第三届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:北京科技大学天津学院队伍名称:急速奇侠参赛队员:贺翔左浩雷郭文慧带队教师:李光耀关于技术报告和研究论文使用授权的说明本人完全了解第一届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:贺翔左浩雷郭文慧带队教师签名:李光耀日期:08.8.16引言首届"飞思卡尔"杯全国大学生智能汽车竞赛在清华大学的承办下终于落户中国,本届大赛采用邀请赛的方式,邀请了国内具有控制科学与工程学科博士授予点高校(含港澳)50余所,我们作为参赛方,有幸参加了此次“飞思卡尔智能汽车邀请赛”。
这份技术报告中,我们小组通过对整体方案、电路、算法、调试、车辆参数的介绍,详尽地阐述了我们的思想和创意,具体表现在电路的创新设计,以及算法方面的独特想法,而对单片机具体参数的调试也让我们付出了艰辛的劳动。
这份报告凝聚着我们的心血和智慧,是我们共同努力后的成果。
在准备比赛的过程中,我们小组成员涉猎控制、模式识别、传感技术、汽车电子、电气、计算机、机械等多个学科,这次磨练对我们的知识融合和实践动手能力的培养有极大的推动作用,在此首先要感谢清华大学,感谢他们将这项很有意义的科技竞赛引入中国;更要感谢学院对此次比赛的关注,我们能有今天这样的成果离不开学院的大力支持及指导老师悉心的教导;还要感谢的是和我们一起协作的队员们,协助,互促,共勉使我们能够走到今天。
目录引言.................................................................................................................................................... - 1 - 目录.................................................................................................................................................... - 2 - 第一章:赛车系统整体设计 (1)1.1总体策略 (1)1.2 系统设计方案 (1)1.3赛车机械结构 (2)1.4.光电寻迹方案 (3)第二章:系统电路设计 (4)2.1电机驱动模块 (5)2.1.1 硬件电路设计 (5)2.1.2 驱动电机性能测试 (7)2.2速度传感器 (8)2.2.1 方案选型 (8)2.2.2 传感器设计及安装 (8)2.2.4 软件设计 (9)2.2.5 速度传感器准确性测试 (9)2.3 本章小结 (10)第三章:智能车系统舵机控制 (11)3.1 舵机控制模块 (11)3.1.1舵机简介 (11)3.1.2舵机的控制 (11)3.1.3 硬件电路设计 (13)3.1.4舵机规则限制 (14)3.2舵机转向数据测试 (14)3.2.1 理想的转向模型 (14)3.2.2试验结论 (16)3.3转向舵机转弯半径分析 (16)3.3.1 转弯半径计算 (16)3.3.2最小转弯半径 (17)3.4不完全微分PD调节 (17)3.5本章小结 (18)第四章:智能车系统速度控制及速度分配 (19)4.1智能车系统速度控制 (19)4.1.1测试开环与闭环控制响应曲线 (19)4.1.2测试开环控制下PWM占空比与电机转速之间的关系 (20)4.2 PID控制 (21)4.3 PID参数整定 (22)4.4 速度分配 (23)4.5本章小节 (23)第五章:开发与调试 (24)5.1 软件开发平台Codewarrior IDE (24)5.2Matlab模拟仿真 (24)5.2.1 理论计算参数 (27)5.2.2 临界震荡法计算PID参数 (27)5.2.3 Ziegler-Nichols法 (28)5.3本章小节 (29)结论 (30)参考文献 (31)第一章:赛车系统整体设计1.1总体策略此次比赛与往届韩国比赛有较大的区别。
2018年天津市大学生创业大赛主赛道获奖名单
84
天津大学仁爱学院
自振动摘枣机
王奇、吴浩东、潘诗财、姚成旺、李博宇
贺莹
85
天津大学仁爱学院
装配式建筑BIM+AR智慧建造技术
马啸雨、乔洋、王祚捷、隋春雪
高展望、吴贝
86
天津财经大学珠江学院
好奇心教室
王梓梦、熊亚一、徐瑞廷、徐伟
樊嘉钰、刘冬霞、汪蕾
三等奖(1001人)
1
南开大学
芥末油微胶囊
薛义、高琪、段峰
3
天津大学
一体化水处理技术及设备
史全滨、张媛、张超、靳津、李海蕴
刘洪波、张宏伟、孙井梅、赵鹏、鲁逸人
4
天津科技大学
质达等离子:食品杀菌技术的引领者
陈玥、张一夫、李秀秀、穆婉菊、冯佳、陈诚、闫斯亮、徐萌
陈野、李书红
5
天津科技大学
碳纤维复合材料-让新能源汽车轻装远行
杨忠立、黄根、苗新祎、杨路鹏、杨小兰、刘奕杰、孙三昊、曹丽萍、周海霞、王一帆、张嘉、杜源、杨瑞、马少杰
周红刚、王渤洋
2
南开大学
微生物法制取乙醇
王昕、滑若彤、王雨晴、张雅琪、李佳骏、伍广川
王渤洋
3
天津大学
基于“互联网+”的模块化智能集装箱建筑
冯宏欣、卜燕慧、郑婷月、马振雷、王子伟
郭娟利、唐晨
4
天津大学
安电猫
郭冬雨、魏宁、李丁、储旭
王晓飞
5
天津大学
BASIC:生物质焚烧/气化工业化的基石
谷天宝、王雅琳、台凌宇、韩自玺
张璐
73
天津商业大学宝德学院
眷旅app -远程可视旅行应用
马健恒、葛林、徐玥华、张菽惠
天津市教育委员会关于公布2010年天津市大学生计算机应用能力竞赛结果的通知

天津市教育委员会关于公布2010年天津市大学生计算
机应用能力竞赛结果的通知
文章属性
•【制定机关】天津市教育委员会
•【公布日期】2010.12.21
•【字号】津教委办[2010]101号
•【施行日期】2010.12.21
•【效力等级】地方规范性文件
•【时效性】现行有效
•【主题分类】高等教育
正文
天津市教育委员会关于公布2010年天津市大学生计算机应用
能力竞赛结果的通知
(津教委办〔2010〕101号)
各普通高等学校:
为进一步推进大学计算机基础教学改革,激发学生学习和运用计算机知识的热情,培养学生创新意识、团队精神及综合运用知识的能力,市教委与市普通高等学校计算机基础教学指导委员会联合举办了2010年天津市大学生计算机应用能力竞赛,全市22所高校的2100余名学生参加了竞赛。
经专家组评审,共评出获奖项目101项。
现将获奖名单予以公布(见附件)。
二○一○年十二月二十一日附件
2010年天津市大学生计算机应用能力竞赛获奖名单
一、面向对象的程序设计
三、专业应用创作
四、创新成果。
一类条件极值问题的求解与研究

黑龙江科学HEILONGJIANG SCIENCE第12卷第3期2021年2月Vol. 12Feb. 2021一类条件极值问题的求解与研究鲍勇(北京科技大学天津学院,天津301830)摘要:利用代入法、几何法、拉格朗日乘数法对一类条件极值问题进行求解,还可利用几何法求解平面直角坐标系中曲线上的点到 直线的最短距离问题,并将其推广到空间直角坐标系中来求解一类最短距离问题。
条件极值问题有很多不同的解法,但除了拉格 朗日乘数法外,其余条件极值问题的解法往往具有局限性,而几何法从理解角度、计算层面来说都是简单易懂的,是一种可选择的 计算方法。
关键词:一类条件极值问题;求解中图分类号:0171.2 文献标志码:A文章编号:1674 -8646(2021)03 -0035 -03Solution and Research of a Kind of Conditional Extremum ProblemBao Yong(Tianjin College ,University of Science and Technology Beijing,Tianjin 301830, China )Abstract : Through substitution method , Geometric method and Lagrange multiplier method , the research solves the problem of a kind of conditional extremum. Through Geometric method , the research solves the problem of the shortest distance from points on curve and rectilinear in rectangular plane coordinate system ・ And through its promotion to the space rectangular coordinate system , the problem of the shortest distance of this kind is solved ・ There are a lot of different solutions in conditional extremum problem ・ However expect Lagrange multiplier method , other solutions of conditional extremum problems has their own limitations. Geometric method is simple from understanding aspect andcalculation layer ・Key words : A kind of conditional extremum ; Solution0引言对于条件极值而言,一般的求解思路是化有条件极值为无条件极值。
第十二届全国大学生恩智浦杯智能汽车竞赛总决赛成绩公告

第十二届全国大学生“恩智浦”杯智能汽车竞赛全国总决赛成绩公告第十二届全国大学生智能汽车竞赛全国总决赛于2017年8月23日至26日在常熟理工学院举行。
共有166所学校、365支队伍参加比赛。
其中,竞速赛电磁普通组49支,电磁节能组44支,电磁追逐组46支,光电四轮组49支,光电直立组46支,光电追逐组45 支,创意赛四旋翼导航组41支,双车对抗组45支,特邀队伍8支。
共计参赛同学1112 人,指导教师508人。
经过三天的现场环境适应、预赛和决赛,本届总决赛最终决出竞速赛比赛的一等奖和二等奖、创意赛比赛的一等奖、二等奖和创意奖等奖项。
同时,竞赛组委会还颁发了竞赛组织贡献奖。
现将本届竞赛的各奖项和参赛队伍的成绩公告如下:一、竞速赛获奖名单2、电磁节能组3、电磁追逐组4、光电四轮组5、光电直立组6光电追逐组二、创意赛获奖名单1、四旋翼导航组2、双车对抗组三、组织贡献奖获奖名单1、常熟理工学院2、大连理工大学3、河南理工大学4、三江学院5、湘潭大学6云南民族大学7、安徽信息工程学院8、青岛恒星科技学院9、宁波工程学院四、竞速赛参赛队伍决赛成绩1总决赛承办学校东北赛区承办学校华北赛区承办学校华东赛区承办学校华南赛区承办学校西部赛区承办学校安徽赛区承办学校山东赛区承办学校浙江赛区承办学校234、光电四轮组5、光电直立组6五、创意赛参赛队伍决赛成绩1、四旋翼导航组六、竞速赛参赛队伍预赛成绩1、电磁普通组2、电磁节能组3、电磁追逐组45、光电直立组6七、创意赛参赛队伍预赛成绩1、四旋翼导航组2、双车对抗组全国大学生智能汽车竞赛组委会秘书处2017 - 8 - 31。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:北京科技大学天津学院队伍名称:北京科技大学天津学院二队参赛队员:张素杰程诚王醒带队教师:罗富臣关于技术报告和研究论文使用授权的说明本人完全了解第二届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:张素杰程诚王醒带队教师签名:罗富臣日期:2007.8.17摘要本文详细介绍了我们为第二届全国智能车大赛而准备的智能车系统方案。
该系统以Freescale16位单片机MC9S12DG128作为系统控制处理器,采用激光传感器对赛道信息进行采集,并通过赛道记忆方法对赛道信息进行记录,反馈回给电机和舵机,在第二圈中达到校正。
通过欧姆龙光电编码器获取小车速度,进行速度反馈处理,最后利用PID控制方式作为了最终的选择。
文中还将介绍赛车传感器布置及安装方法,自制电路主板、赛道记忆算法及开发出的调试系统,还将介绍机械结构和调整方法,及舵机安装方式。
关键词:激光传感器、控制策略、速度传感器、赛道记忆AbstractThis paper introduces us to the second session of the National Smart car racing prepared smart car system plan. The system Freescale16 MC9S12DG128 bit extreme but as a system controlprocessor, Using modulation laser sensors to track information Acquisition, through the memory circuit and method for information on the track record, feedback back to the motor and steering, The second lap achieve Correction. Omron through photoelectric encoder speed access Trolley, Speed feedback processing. Finally PID control as a means to the ultimate choice. The article will introduce the car sensor layout and installation methods, Self-made circuit board, the circuit memory algorithm and the development of the system debugging, also introduced mechanical structure and adjustment methods, and installation Rudder.Key word:Laser Sensor, Control Strategy, speed sensor circuit memory目录第一章引言 (1)1.1 比赛背景介绍 (1)1.2 方案介绍 (1)1.3本文结构 (1)第二章赛车系统整体设计 (2)2.1系统硬件结构设计 (2)第三章光电传感器 (3)3.1传感器选型 (3)3.2 传感器排布 (3)第四章主控板硬件电路设计 (5)4.1电源模块 (5)4.2电机驱动模块 (6)4.3硬件抗干扰措施 (7)4.4印制电路板可靠性和抗干扰设计 (8)4.5主控板的安装 (8)第五章电机驱动模块 (9)5.1 硬件电路设计 (9)5.2 驱动电机性能测试 (9)5.3 程序代码 (10)第六章舵机驱动模块 (14)6.1硬件电路设计 (14)6.2程序代码 (14)第七章速度传感器 (16)7.1传感器设计及安装 (16)7.2 硬件电路设计 (16)7.3 软件设计 (17)7.4速度传感器准确性测试 (18)7.5 安装方式 (18)第八章赛道记忆 (19)8.1智能车运动状态实时监测系统总述.................................19. 8.1.1系统整体硬件架构 (19)8.1.2系统整体软件架构 (20)8.2起跑信号发送装置 (21)8.2.1起跑信号发送装置工作原理 (21)8.3车载数据采集系统设计及实现 (22)8.4机数据接收处理系统设计及实现 (22)8.5手持数据接收及监测系统设计及实现 (23)8.6动态数据接收及显示模式 (24)第九章赛车机械结构调整 (25)9.1舵机安装调整 (25)9.2前轮倾角的调整 (25)第十章总结 (26)10.1比赛准备阶段 (26)10.2激光传感器设计 (26)10.3赛道记忆控制策略及开发的赛车运动状态实时监测系统 (26)10.4设计中存在的问题…………………………………………26.10.5未来寄语 (27)第一章引言1.1 比赛背景介绍受教育部高等教育司委托,高等学校自动化专业教学指导分委员负责主办全国大学生智能车竞赛。
该项比赛已列入教育部主办的全国五大竞赛之一。
2007年8月日,在上海交通大学举行第二届全国大学生智能车竞赛。
本届的比赛,首先是在全国五大赛区进行预选赛,之后将有只赛车到上海进行总决赛。
在比赛中,“参赛选手须使用大赛组委会统一提供的竞赛车模,采用飞思卡尔16控制器MC9S12DG128作为核心控制单元,自主构思控传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,完成智能车工程制作及调试,于指定日期与地点参加场地比赛。
参赛队伍之名次(成绩)由赛车现场成功完成赛道比赛时间为主,技术方案及制作工程质量评分为辅来决定”,“须采用统一提供的车模,须采用限定的飞思卡尔16位微控制器 MC9S12DG128 作为唯一控制处理器,车模改装完毕后,尺寸不能超过:250mm 宽和400mm长,高度无限制”,“跑道宽度不小于600mm,跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm”,并且跑道有坡道。
1.2 方案介绍由评分规则可知,本次比赛的关键在于提高小车的速度和稳定性。
其实际问题是如何更早且更好的提取到赛道信息。
我们采取的策略是激光传感器加赛道记忆,共同实现我们的目标。
这样不仅可以提高赛车的前瞻性,使赛车的稳定性提高。
而且通过赛道信息的记录,可以在第二圈中,对赛车状态进行校正,提高成绩。
1.3本文结构本文共十章。
其中第一章为引言部分。
简单介绍比赛背景及赛车的基本方案。
第二章主要介绍赛车整体系统结构,对赛车整体流程及控制进行介绍和说明。
第三章介绍赛车传感器,包括选型、排布及安装方式。
第四章将对自行研制的主控板进行介绍及说明,包括电路设计及主控板的安装。
第五章介绍电机驱动模块,包括硬件电路的设计及电机性能的测试。
第六章将对舵机驱动模块进行说明。
第七章为速度传感器,包括电路设计、安装方式及准确性。
第八章为赛道记忆控制策略及开发的赛车运动状态实时监测系统。
第九章介绍赛车机械结构调整。
第十章将对全文作出概括总结。
第二届全国大学生智能汽车竞赛技术报告第二章赛车系统整体设计2.1系统硬件结构设计根据激光传感器方案设计,赛车共包括大模块:激光传感器模块控制处理芯片MC9S12DG128,舵机驱动模块,电机驱动模块、速度传感器第三章光电传感器3.1传感器选型由于赛道具体信息还不知道,所以必须选择合适的路面信息检测传感器。
通过查阅相关资料,了解到目前常用的寻线技术有:光电寻线、磁诱导寻线和摄像头寻线。
光电寻线一般由多对红外收发管组成,通过检测接收到的反射光强,判断黑白线。
在这种方案中,一对收发管只能检测一个点的信息,精度有限。
但其优点是电路简单,处理方便。
路面磁诱导与智能车辆的车载机器视觉诱导相比,最大优点是完全不受光照变化的影响。
但这种方式必须以车道中心线上布设的离散磁道钉作为车道参考标记,这违背了比赛规则。
摄像头寻线通过图像采集,动态拾取路径信息,并对各种情况进行分析。
它具有信息量大,能耗低的优点,但对数据的处理相对复杂。
作为第一次参加此次大赛,并通过对第一届比赛的研究,我们决定还是从光电管入手。
要提高速度并保证在入弯时不撞到标竿,就必须增加传感器的“视野”,以便及时减速。
通过比较,发现市场上的激光管有比较好的性能,它可以照射很远的距离依然有很高的强度,根据激光特性,除了激光的入射光和反射光是最强的以外,其他的所有散射光的强度都是相同的,在此情况下,实际测量发现激光可以看到20cm以上的距离,对于赛车的前瞻性大有好处,可以适当把光照调远,实现前瞻性循线控制。
3.2 传感器排布为了完成赛道记忆算法,我们采用了前十后五的传感器排布方式。
这样前十路传感器采集的数据负责对赛车进行转角的控制。
而后五路传感器采集的数据则传递给单片机后通过分析并记录下来,为第二圈舵机、电机控制提供反馈信息。
数字型光电传感器只有0与1 两种状态,因此各个传感器的布局间隔将影响车对路径的识别精度以及对舵机的控制算法的优劣。
赛道规定的是:黑线宽度25mm,赛车可以沿着黑线自主循线。
当任何时刻只有一路传感器在黑线上的情况(每两个传感器之间的间距是25mm):第二届全国大学生智能汽车竞赛技术报告图3.1 传感器间距为25mm的情况由图3.1可知,传感器由一种状态转化为另一种状态所移动的距离,即有效距离为:25mm。
当有时有一路传感器在黑线上,有时有两路传感器在黑线上的情况下(12.5mm<传感器两两间距<25mm):图3.2 传感器间距在12.5mm和25mm之间的情况由图3.2可知,d1=25-x,d2=2x-25若要舵机平缓过渡,减少瞬时精度高,长时间精度低的情况出现,令d1=d2为最优情况,即:25-x=2x-25得x=16.7mm,d1=d2=8.3mm传感器安装:传感器有发射和接收两部分,所以需要制作支架固定其位置。
根据尺寸要求,在支架上打孔固定发射管和接收管。
为了有较合适的重心位置,应该选择质量较轻的材料,最后利用胶水使传感器固定。
见图一第四章主控板硬件电路设计4.1电源模块比赛提供7.2V电池,整个系统需要为以下模块供电:为单片机供电;(5V);为传感器供电;(5V);为电机驱动供电;(7.2V);为舵机供电(转向舵机和制动舵机);(7.2V或6V)可能会有发热元件,接出5V风扇供电口。