智能制造与工业大数据研究团队-西安电子科技大学机电工程学院
西安电子科技大学导师简介

导师介绍机电工程学院各学科博、硕士研究生导师(按姓氏笔划排序)工程力学(080104)硕士生导师:仇原鹰徐亚兰陈贵敏杨勇机械制造及其自动化(080201)博士生导师:仇原鹰李团结苏玉鑫陈建军郑飞段宝岩贾建援周德俭(兼)硕士生导师:马洪波马娟王芳林李凯杜淑幸邵晓东陈建军郑飞段江涛赵克殷磊崔明涛曹鸿钧陈永琴孔宪光仝勖峰许威杨东武机械电子工程(080202)博士生导师:段宝岩郑晓静仇原鹰王龙李志武邵晓东陈建军周孟初贾建援黄进王从思陈贵敏邱扬田文超平丽浩(兼) 周德俭(兼) 杜敬利 Alessandro Giua Witold Pedrycz硕士生导师:马伯渊仇原鹰王从思田文超田锦刘焕玲过润秋李志武杜敬利苏玉鑫邱扬邵晓东陈光达陈贵敏郑飞段宝岩贾建援黄进段清娟段学超朱言午曹艳荣米建伟牛海军(校内)机械设计及理论(080203)硕士生导师:朱敏波许社教李团结陈建军亿珍珍电子机械科学与技术(0802Z1)博士生导师:李团结邵晓东郑飞保宏硕士生导师:保宏朱敏波王伟宋立伟工业设计(0802Z2)硕士生导师:杨西惠张英李建坤邵晓东精密仪器与机械(080401)硕士生导师:王卫东田文超李团结张菊香黄进樊康旗王从思陈光达测试计量技术及仪器(080402)博士生导师:刘贵喜王海李小平(校内) 郭宝龙(校内) 庄奕琪(校内) 李智(兼)硕士生导师:于建国王海白丽娜任获荣朱红张玲霞李智奇邱扬陈晓龙宣宗强赵克赵建孙璐王辉肖建康高建宁(校内) 王松林(校内) 谢楷(校内) 方海燕(校内) 方葛丰(兼)郭利强(兼)电机与电器(080801)硕士生导师:明正峰赵明英郑峰控制理论与控制工程(081101)博士生导师:李志武李智王龙周孟初 Alessandro GiuaWitold Pedrycz 刘贵喜明正峰胡核算张强硕士生导师:千博马伯渊王龙刘贵喜朱荣明过润秋张大兴张强张菊香李智李志武陈光达屈胜利保宏段宝岩贾建援韩保君王安荣郭金维侯叶胡核算李向宁陈玉峰钟春富周孟初(兼) 郭宝龙(校内)。
西安电子科技大学2016年报考电子工程学院硕士研究生面试分组情况表

电子系二组 电子系二组 对抗系一组 对抗系一组 智能所 智能所 智能所 智能所 智能所 智能所 对抗系一组 对抗系一组 智能所 电信系一组 CAD所 CAD所 智能所 智能所 智能所 智能所 智能所 智能所 智能所 智能所 电子所 智能所 智能所 智能所 对抗系一组 对抗系一组 对抗系一组 CAD所
李溪 孙尚毅 李霜 曹先博 彭可 李广 段光华 姜泽佩 赵刚 张瑞 窦俊杰 刘一廷 黄超 瞿宏升 杨凯文 孙学平 聂清 林伟强 付孟豪 赵书宽 赵亚瑞 杨舒旸 王帅 胡宽 解旭彤 朱海明 张哲 李一凡 刘鹏 蔡敏康 岳昊 衡艺能
女 男 女 男 男 男 男 男 男 男 男 男 男 男 男 男 男 男 男 男 女 男 男 男 女 男 男 男 男 男 男 女
杜思文 刘翼群 李苑 陈冲 车金鸽 李昕卓 王晓凡 王宇豪 曾昊天 刘瑾 雷琛 伍金霄 刘星 陈忠勇 张攀 郭邦 苏浩明 刘思成 马蕾 陈逸然 闫金涛 岑汉 苏小凡 韩轶丹 毛勇博 张向凡 孙顺莱 吴志威 郑威 杨曜州 蔡怡 王露莹
女 男 女 男 女 女 男 男 男 女 女 男 女 男 男 男 男 男 女 男 男 男 女 女 男 女 男 男 男 男 女 女
0845 0853 0854 0857 0858 0859 0860 0862 0864 0866 0869 0870 0875 0877 0881 0882 0884 0886 0890 0893 0894 0895 0897 0 0909 0910 0912 0913
考生编号后四位 0691 0692 0694 0695 0696 0697 0700 0701 0703 0708 0717 0718 0720 0721 0725 0726 0727 0728 0729 0737 0738 0744 0751 0753 0754 0756 0761 0765 0767 0768 0770
高校课题申报:新工科背景下机械工程专业产教融合人才培养模式研究与实践
新工科背景下机械工程专业产教融合人才培养模式研究与实践学科分类:高等教育课题类别:一般课题关键词:新工科,智能制造,产教融合预期研究成果:研究报告课题设计论证1.1 问题的提出为主动应对新一轮科技革命与产业变革,支撑服务创新驱动发展、“中国制造2025”等一系列国家战略。
2017年2月以来,教育部积极推进新工科建设,专门制订了行动路线,明确提出高校要“深化产教融合、校企合作、协同育人,推动传统工科专业改造升级”。
随着“新工科”建设的逐步推进,“产教融合”作为应对第四次产业革命、高端智能制造、“中国制造2025”“双一流”大学建设,以及新工科教育改革等一系列挑战的有效举措,被寄予空前的厚望。
产教融合能提升科技成果转化率,促进我国经济发展新旧动能持续转化,加强智能制造产业核心竞争力,逐步提高行业企业参与办学程度,健全多元化办学体制,全面推行校企协同育人。
在宏观层面能推动经济增长方式由要素驱动向创新驱动转变,在微观层面能实现企业、高校和科研院所深度融合,形成创新合力。
此外,“产教融合”远超出了传统人才培养的范畴,它是人才发展引领产业转型升级的“助推器”、促进毕业生就业的“稳定器”、人才红利的“催化器”;从长远来看,“产教融合”将推动整个高等教育系统性变革,打造新型的中国高等教育系统,使高校与产业界围绕产业与技术变革中的核心要素,构建新型的高等教育系统和产业体系之间的互动演进关系,推动国家实现科技自主创新与高端智能制造技术变革。
然而,纵观当前新工科背景下的高校“产教融合”教育的现状,机械工程专业也逐渐出现一些新的亟待解决的问题和挑战:随着“制造”向“智造”的转型升级,在新工科专业建设布局下,迫切需要我们去探索如何进一步明确“建立产教融合、校企合作的技术技能人才培养模式”,从而更好的整合课内课外资源、校内校外资源、国内与国际资源等开展多元化人才培养的协同育人机制研究,构建多元化的协同育人模式,并开展实践探索工作,推动新形势下人才培养质量的提升。
西安电子科技大学副教授杨龙 坚持自主创新 赋能工业物联网
西安电子科技大学副教授杨龙坚持自主创新赋能工业物联网马玲
【期刊名称】《中国高新科技》
【年(卷),期】2024()8
【摘要】工业是国民经济的基础。
随着科技的发展,工业物联网被广泛应用于制造业供应链管理、生产设备健康管理、生产过程工艺优化和工业安全生产管理等领域,并凭借其实时性、自动化、嵌入式、安全性和信息互通互联性等特点,能有效提高制造效率,改善产品质量,降低产品成本和资源消耗,最终实现将传统工业提升到智能化的新阶段。
因此,工业物联网技术也成为新的研究热点。
西安电子科技大学华山领军教授、副教授杨龙,作为陕西省青年科技新星,正在这股科研大潮中砥砺前行。
【总页数】2页(P10-11)
【作者】马玲
【作者单位】不详
【正文语种】中文
【中图分类】F42
【相关文献】
1.新型半导体材料的破局与博弈——记西安电子科技大学副教授宁静
2.赋能超声精准筑“器”——西安电子科技大学副教授费春龙的科研进阶路
3.坚持科研自主创新心系中国装备制造——记广东工业大学青年“百人计划”特聘副教授吴正涛
4.知识化笔,书写红色新篇--记西安电子科技大学电子工程学院副教授董阳阳
5.西安电子科技大学副教授朱卫东教学科研并重争做新能源产业发展的推动者
因版权原因,仅展示原文概要,查看原文内容请购买。
2023哪些大学有智能科学与技术专业

2023哪些大学有智能科学与技术专业
智能科学与技术专业简介
智能科学与技术专业以光、机、电系统的单元设计、总体集成及工程实现的理论、技术与方法为主要内容,培养具备基于计算机技术、自动控制技术、智能系统方法、传感信息处理等科学与技术,进行信息获取、传输、处理、优化、控制、组织等并完成系统集成的,具有相应工程实施能力,具备在相应领域从事智能技术与工程的科研、开发、管理工作的、具有宽口径知识和较强适应能力及现代科学创新意识的高级技术人才。
智能科学与技术专业就业方向
学生毕业后可从事智能制造技术、智能网络技术、智能检测技术、智能机器人、智能交通、智能监控等领域的研究、设计与开发、技术管理等工作,或从事智能科学与技术及相关学科的教学与科研工作。
也可报考人工智能、计算机科学与技术、软件工程、模式识别与智能控制、控制工程等相关学科的硕士学位。
智能科学与技术专业就业前景
智能科学与技术专业毕业生就业前景广阔,薪资水平较高。
该专业毕业生主要面向的就业领域包括电子信息、自动控制、计算机、智能科学与技术等相关领域毕业生主要从事产品开发、系统测试、技术支持与咨询、产品销售等工作,以及各类学校及科研院所从事相应的教学、科研等工作。
“智能制造”背景下新工科人才的跨学科培养方法探索

科技风2021年4月科技创新DOI:10.19392/ki.1671-7341.202110003“智能制造"背景下新工科人才的跨学科培养方法探索何利华倪敬杭州电子科技大学机械工程学院浙江杭州310018摘要:摘要:智能制造已经在全球范围內成为了大趋势。
本文就“智能制造”背景下新工科人才的跨学科培养方法的探索与研究,分析了跨学科协同培养新工科人才的必要性以及国內外工科人才教育现状,探讨了新工科人才的跨学科协同培养方法,重点结合“任务驱动(项目+竞赛)”的培养模式,将培养“机械+”交叉复合型新工科人才作为最终目标,逐渐形成机械与材料工程、机械与管理工程等全面发展与个性发展相结合的素质教育模式。
关键词:智能制造;跨学科;新工科;人才培养智能制造成为现代制造业发展的前沿技术,那么与之相适应的创新型拔尖人才培养必然需要加强,从而推动产业升级,提升国家核心竞争力,实现国家战略目标。
大学作为高等教育主要阵地,必须意识到在智能制造领域中,只有培养能同时满足不同学科不同层次需求的人才,才能顺应时代的发展。
一、跨学科协同培养新工科人才的必要性分析(一)顺应时代发展、符合国家战略新形势下的国际经济与制造业环境发生了变化,德国联邦教研部与联邦经济技术部于2013年推出了“工业4.0”,利用物联信息系统将生产中的供应、制造、销售信息数据化、智慧化,随后被列入了《德国2020高技术战略》,成为其中十大未来项目之一。
日美在自身已有的强工业基础之上相继参与领衔“工业4.0”,继而英、印、加、南非等国家也开始纷纷提出与“工业4.0”相对应的工业转型战略规划。
为此,我国也在自身内在需求(经济发展、民生发展等)和外在动力(技术水平、产业结构调整等)的双重推动下于2015年推出《中国制造2025》,把智能制造作为主攻方向,随后国务院又于2017年实施《新一代人工智能发展规划》,明确指出加快推进并实现智能制造+1,$(二)应对我国新工科教育的改革我国高等教育改革从2017年开始全面铺开:加快推进“双一流”建设,加强改进新形势下高校思政教育,深化产教 融合、课程体系、课堂教育等改革。
面向复杂工业大数据的实时特征提取方法
面向复杂工业大数据的实时特征提取方法孔宪光;章雄;马洪波;常建涛;牛萌【摘要】Industrial big data have the traits of big volume , multi‐sources , continuous sampling and low value density , which results in high complexity , real‐time and high abnormality . Traditional feature extraction methods cannot meet the real‐time requirements of complex industrial big data . In addition , the processing method for industrial big data is different from the internet data stream processing method , which has a higher accuracy requirement . Therefore , this paper proposes a robust incremental on‐line feature extraction method as the Robust Incremental Principal Component Analysis . It uses the sliding window to update new coming data dynamically and filter the abnormal data in windows , thenthe incremental principal component analysis is implemented on data in windows in order to meet the accuracy and real‐time requirements of industrial big data processing . Experimental results show that the proposed method can effectively extract the data stream in real time with high accuracy .%工业大数据具有大体量、多源性、连续采样和价值密度低等特点,造成其数据复杂度高、实时性强和异常数据多。
基于catia模型的拆装动画制作方法研究

收稿日期:2018 - 10 - 15
基金项目:工业和信息化部智能制造综合标准化与新模式应用项目( 高速动车组关键零部件智能制造新模式应用项目)
作者简介:文勃(1966—) ꎬ男ꎬ高级工程师ꎬ主要研究方向为智能制造、研发信息化ꎬwb@ cqsf. com.
109
2020 年第 49 卷 机械设计与制造工程
CATIA、3DVIA Composer [5] 和 SolidWorks [6 - 7] ꎬ西门
三维环境下ꎬ结合软件的碰撞检测功能ꎬ规划零部
件的拆卸顺序ꎬ零部件的拆卸顺序规划完成之后ꎬ
其逆序即装配顺序ꎮ
2) 爆炸图生成ꎮ 基于拆装顺序ꎬ确定组成装
配体各装配单元的爆炸方向ꎬ并计算各装配单元的
爆炸距离ꎬ分层分步骤地完成爆炸图的生成ꎮ
3) 拆装动画生成ꎮ 解析装配体各装配单元在
图的生成ꎮ 在爆炸图生成过程中ꎬ若在某一爆炸方
装配状态和爆炸状态下的位姿变换矩阵ꎬ根据各装
向上有多个装配单元ꎬ为避免装配单元的重叠或接
配单元的位姿矩阵变化情况生成动画轨迹ꎮ
触ꎬ将该方向上之前已经爆炸的装配单元随着本次
4) 最优视角确定ꎮ 为了更好地观察装配单元
时ꎬ因为模型接触不应该判定为干涉ꎬ所以需要在
干涉结 果 中 进 行 判 断ꎬ 只 有 存 在 catConflictType ̄
Clash 类型的干涉时才将模型视为与其他的模型干
径和机构运动关系ꎬ以及零部件之间是否存在干涉
等ꎮ 随着航空、航天、船舶、汽车、工程机械、轨道交
通等领域大型产品的零部件结构越来越复杂ꎬ精度
要求越来越高ꎬ零部件越来越多ꎬ对拆装动画的制
作需求越来越迫切ꎮ
国内外研究人员对拆装动画制作进行了大量
机电工程学院硕士研究生招生专业目录及自命题考试科目参考书
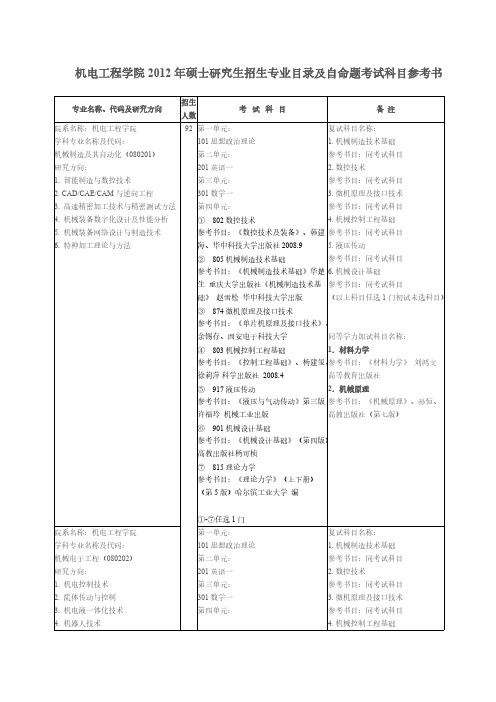
机电工程学院2012年硕士研究生招生专业目录及自命题考试科目参考书专业名称、代码及研究方向招生人数考试科目备注院系名称:机电工程学院学科专业名称及代码:机械制造及其自动化(080201)研究方向:1. 智能制造与数控技术2. CAD/CAE/CAM与逆向工程3. 高速精密加工技术与精密测试方法4. 机械装备数字化设计及性能分析5. 机械装备网络设计与制造技术6. 特种加工理论与方法第一单元:101思想政治理论第二单元:201英语一第三单元:301数学一第四单元:①802数控技术参考书目:《数控技术及装备》、韩建海、华中科技大学出版社2008.9②805机械制造技术基础参考书目:《机械制造技术基础》华楚生重庆大学出版社《机械制造技术基础》赵雪松华中科技大学出版③874微机原理及接口技术参考书目:《单片机原理及接口技术》、余锡存、西安电子科技大学④803机械控制工程基础参考书目:《控制工程基础》、杨建玺、徐莉萍科学出版社2008.4⑤917液压传动参考书目:《液压与气动传动》第三版许福玲机械工业出版⑥901机械设计基础参考书目:《机械设计基础》(第四版)高教出版社杨可桢⑦815理论力学参考书目:《理论力学》(上下册)(第5版)哈尔滨工业大学编①-⑦任选1门复试科目名称:1. 机械制造技术基础参考书目:同考试科目2. 数控技术参考书目:同考试科目3. 微机原理及接口技术参考书目:同考试科目4. 机械控制工程基础参考书目:同考试科目5. 液压传动参考书目:同考试科目6. 机械设计基础参考书目:同考试科目(以上科目任选1门初试未选科目)同等学力加试科目名称:1.材料力学参考书目:《材料力学》刘鸿文高等教育出版社2.机械原理参考书目:《机械原理》、孙恒、高教出版社(第七版)院系名称:机电工程学院学科专业名称及代码:机械电子工程(080202)研究方向:1. 机电控制技术2. 流体传动与控制3. 机电液一体化技术4. 机器人技术92第一单元:101思想政治理论第二单元:201英语一第三单元:301数学一第四单元:复试科目名称:1. 机械制造技术基础参考书目:同考试科目2. 数控技术参考书目:同考试科目3. 微机原理及接口技术参考书目:同考试科目4. 机械控制工程基础5. 制造系统工程6. 嵌入式测控系统设计①802数控技术参考书目:《数控技术及装备》、韩建海、华中科技大学出版社2008.9②805机械制造技术基础参考书目:《机械制造技术基础》华楚生重庆大学出版社《机械制造技术基础》赵雪松华中科技大学出版③874微机原理及接口技术参考书目:《单片机原理及接口技术》、余锡存、西安电子科技大学④803机械控制工程基础参考书目:《控制工程基础》、杨建玺、徐莉萍科学出版社2008.4⑤917液压传动参考书目:《液压与气动传动》第三版许福玲机械工业出版⑥901机械设计基础参考书目:《机械设计基础》(第四版)高教出版社杨可桢⑦815理论力学参考书目:《理论力学》(上下册)(第5版)哈尔滨工业大学编①-⑦任选1门参考书目:同考试科目5. 液压传动参考书目:同考试科目6. 机械设计基础参考书目:同考试科目(以上科目任选1门初试未选科目)同等学力加试科目名称:1.材料力学参考书目:《材料力学》刘鸿文高等教育出版社2.机械原理参考书目:《机械原理》、孙恒、高教出版社(第七版)院系名称:机电工程学院学科专业名称及代码:机械设计及理论(080203)研究方向:1. 齿轮传动件的数字化设计2. 齿轮制造技术及其装备3. 现代数控装备设计技术4. 滚动轴承的数字化设计与技术5. 摩擦学与表面工程6. 滑动轴承先进设计理论与制造方法第一单元:101思想政治理论第二单元:201英语一第三单元:301数学一第四单元:①802数控技术参考书目:《数控技术及装备》、韩建海、华中科技大学出版社2008.9②805机械制造技术基础参考书目:《机械制造技术基础》华楚生重庆大学出版社《机械制造技术基础》赵雪松华中科技大学出版③874微机原理及接口技术参考书目:《单片机原理及接口技术》、余锡存、西安电子科技大学④803机械控制工程基础参考书目:《控制工程基础》、杨建玺、徐莉萍科学出版社2008.4复试科目名称:1. 机械制造技术基础参考书目:同考试科目2. 数控技术参考书目:同考试科目3. 微机原理及接口技术参考书目:同考试科目4. 机械控制工程基础参考书目:同考试科目5. 液压传动参考书目:同考试科目6. 机械设计基础参考书目:同考试科目(以上科目任选1门初试未选科目)同等学力加试科目名称:1.材料力学参考书目:《材料力学》刘鸿文高等教育出版社⑤917液压传动参考书目:《液压与气动传动》第三版 许福玲 机械工业出版⑥ 901机械设计基础参考书目:《机械设计基础》(第四版)高教出版社杨可桢⑦ 815理论力学参考书目:《理论力学》(上下册)(第5版)哈尔滨工业大学 编①-⑦任选1门2.机械原理参考书目:《机械原理》、孙恒、高教出版社(第七版)院系名称:机电工程学院学科专业名称及代码:精密仪器及机械(080401)研究方向:1. 光测技术及信号处理2. 精密机械电子系统3. 智能化信号检测与装备4. 大型装备检测技术及应用5. 机电设备故障诊断第一单元:101思想政治理论第二单元:201英语一第三单元:301数学一第四单元:①916测试技术参考书目:《机械工程测试技术》,韩建海,清华大学出版社,第一版②807误差理论与数据处理参考书目:《误差理论与数据处理》,费业泰,机械工业出版社,第六版。
基于catia模型的自动爆炸图制作方法研究
DOI:10.3969/j.issn.2095-509X.2020.03.026基于CATIA模型的自动爆炸图制作方法研究马永敬1ꎬ刘光俊1ꎬ安㊀帅1ꎬ牟㊀琳1ꎬ杜伟平2(1.中车青岛四方机车车辆股份有限公司ꎬ山东青岛㊀266031)(2.西安电子科技大学机电工程学院ꎬ陕西西安㊀710071)摘要:针对当前商品化三维CAD系统自动爆炸功能存在爆炸不完全㊁位置不合理㊁不能再次调整等问题ꎬ提出了一种基于微位移和碰撞检测的分层自动爆炸方法ꎮ该方法首先根据装配约束情况确定一个优化的试爆炸顺序ꎬ并将模型分为多个试爆炸层ꎬ然后针对每一层的零部件ꎬ通过基于微位移和碰撞检测的方法来确定爆炸方向ꎬ最后基于包围盒计算爆炸距离ꎬ完成模型的自动爆炸ꎮ基于CATIA开发了自动爆炸图制作工具ꎬ以某减速器装配体为例ꎬ验证了该方法的有效性ꎮ关键词:自动爆炸图ꎻ爆炸方向ꎻ爆炸距离ꎻ碰撞检测ꎻCATIA中图分类号:TP391.7㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:2095-509X(2020)03-0121-04㊀㊀航空㊁航天㊁船舶㊁汽车㊁工程机械㊁轨道交通等领域大型产品的零部件结构越来越复杂ꎬ为了揭示和分析产品的内部结构ꎬ设计人员通常使用爆炸图将装配体中的零部件按照顺序㊁方向和距离进行分解来表达零部件的相对空间位置关系ꎮ与剖视图㊁透视图相比ꎬ爆炸图不仅可以清晰展示复杂装配体中零部件及其之间的装配约束关系ꎬ甚至还能展示装配序列和装配路径ꎮ爆炸图目前已应用于设计㊁工艺㊁制造㊁使用㊁维护维修等产品生命周期的各个阶段ꎬ如产品设计阶段用于表达设计结果的爆炸图ꎬ工艺设计阶段用于装配序列规划的爆炸图ꎬ产品使用阶段用于展示产品性能的三维交互式电子手册ꎬ维护维修阶段用于演示产品拆卸的动画等ꎮ国内外研究人员对爆炸图自动生成方法进行了大量研究ꎮAgrawala等[1]利用投影的方法大概确定模型的爆炸方向ꎬ从而自动生成爆炸图ꎻMo ̄tomasa等[2]利用模型的装配手册并通过指定模型的爆炸方向和爆炸距离的方式生成爆炸图ꎬ但是无法实现爆炸图的自动生成ꎻCorrea等[3]利用模型分层的方式将模型不断地剥开来显示模型的内部细节ꎻBruckner等[4]利用力学原理对模型进行拆分ꎬ部分实现了自动爆炸ꎮ于嘉鹏等[5-6]提出了利用装配序列规划算法及零部件几何信息自动生成复杂产品爆炸图的方法ꎬ并基于UGNX平台开发了面向复杂产品的数字化装配序列规划系统对算法进行了验证ꎮ之后提出了基于递归循环的层次化爆炸图自动生成算法ꎬ该算法对层次化装配序列进行深度优先循环搜索ꎬ实时计算已爆炸零部件的累积包围盒ꎬ从而确定待爆炸零件位移矢量ꎬ自动生成间隔均匀有序㊁结构紧凑且空间层次感强的爆炸图ꎮ邢宇飞等[7]提出了一种局部爆炸图自动生成方法ꎬ为降低计算复杂度ꎬ该方法利用蚁群算法求解零件的爆炸顺序ꎮ赵鸿飞等[8]则是使用同步约束解除的方法生成爆炸图ꎮ以上研究推动了爆炸图自动生成技术的发展ꎬ其中部分研究成果还在工程实践中得到了应用ꎮ当前ꎬ大部分商品化三维CAD系统都有自动爆炸功能ꎬ如达索公司的CATIA㊁西门子公司的UGNX和PTC的Creo等ꎬ但商品化三维CAD系统自动爆炸功能存在爆炸不完全㊁位置不合理㊁不能再次调整等问题ꎬ不能很好地满足工程应用中的效率和准确性要求ꎮ如CATIA提供的自动爆炸工具ꎬ生成的爆炸图不尽如人意ꎬ爆炸后模型比较杂乱ꎬ而且爆炸之后难以调整爆炸距离ꎬ调整单个模型的爆炸状态也比较困难ꎬ导致CATIA中的自动爆炸工具利用价值不高ꎬ不能很好地满足产品生命周期各阶段对爆炸图的应用需求ꎮ因此ꎬ本文针对CATIA自动爆炸功能存在的问题ꎬ提出了基于微收稿日期:2018-10-15基金项目:工业和信息化部智能制造综合标准化与新模式应用项目(高速动车组关键零部件智能制造新模式应用项目)作者简介:马永敬(1987 )ꎬ男ꎬ工程师ꎬ硕士ꎬ主要研究方向为制造过程监测与控制㊁数字化工厂ꎬmayongjing@cqsf.com.121 2020年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Mar.2020第49卷第3期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀MachineDesignandManufacturingEngineering㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Vol.49No.3位移和碰撞检测的分层自动爆炸方法ꎬ并开发了自动爆炸图制作工具ꎮ1㊀基于微位移和碰撞检测的分层自动爆炸图制作方法本文提出的自动爆炸过程大体上类似于剥洋葱的过程ꎬ即将模型一层一层由外向内进行剥离ꎬ从而生成有层次的爆炸图ꎮ首先在模型爆炸前ꎬ设置一个在爆炸过程中不动的模型作为爆炸的基体ꎻ然后根据选定的基体及模型的装配约束情况确定一个优化的试爆炸顺序ꎬ并将模型分为多个试爆炸层ꎻ接着按照分层顺序对每一层进行试爆炸ꎬ确定每层零件的爆炸方向和爆炸距离ꎬ直到所有分层都完成爆炸为止ꎬ如图1所示ꎮ图1㊀基于微位移和碰撞检测的分层自动爆炸图制作方法㊀㊀在自动爆炸时ꎬ依次将试爆炸层中的每一个模型按照X+㊁X-㊁Y+㊁Y-㊁Z+㊁Z-方向做微小的移动ꎬ然后检测移动后的模型是否与其他模型发生了干涉ꎬ如果没有发生干涉ꎬ说明在当前状态下模型在该方向上是可以爆炸的ꎬ将该方向记录为模型的可爆炸方向ꎬ否则当前状态下模型在该方向上是不可爆炸的ꎮ每一个模型经过6个方向的试爆炸后ꎬ如果存在几个可行的爆炸方向ꎬ则选择一个最优的爆炸方向并记录下来ꎬ否则在下一轮试爆炸时继续试爆炸该模型ꎮ在一个试爆炸层的模型全部完成试爆炸后ꎬ为了防止对下一层(即里层模型)的试爆炸结果产生影响ꎬ将该层模型中存在可爆炸方向的模型按照所得的最优方向移动单层爆炸距离ꎮ接着ꎬ继续对下一层模型以及之前没有找到可爆炸方向的模型进行试爆炸ꎬ并将有可行爆炸方向的模型移动单层爆炸距离ꎮ为了防止新爆炸的模型与之前爆炸的模型发生接触ꎬ如果在某个方向上产生了新的可以爆炸的模型ꎬ将该方向上之前已经爆炸的模型全部再移动一个单层的爆炸距离ꎬ这样模型就可以按照一定的层次产生爆炸ꎮ以此类推ꎬ重复上述过程ꎬ直到所有的模型都完成爆炸或者所有的模型都没有可爆炸方向ꎬ此时自动过程完成ꎮ现以图1所示的模型自动爆炸过程为例ꎬ进一步说明自动爆炸算法的基本过程和思想ꎮ在自动爆炸的过程中ꎬ首先根据部件中各个零件的接触情况确定试爆炸顺序并分层ꎬ第一层为所有的螺钉㊁垫片㊁螺塞和定位销ꎬ第二层为端盖和支架盖ꎮ然后试爆炸第一层模型ꎬ将每一个零部件沿着6个标准方向进行微小移动并进行干涉检测ꎮ经过检测ꎬ所有的螺钉和油塞均可以移动ꎬ所以将其爆炸到计算得到的位置ꎮ接着将第一层剩下的垫片进行微位移和干涉检测并进行爆炸ꎬ并将同方向的螺钉再移动一个单层的爆炸距离ꎮ最后对第二层的端盖和支架盖进行微位移和干涉检测ꎬ并将其移动到计算得到的位置ꎬ完成爆炸ꎮ2㊀关键技术2.1㊀基于装配约束的爆炸顺序分层方法在基于微位移和干涉检测技术确定模型的爆炸方向时ꎬ需要将每一个模型沿着6个方向进行微移动ꎬ并且检测微移动以后是否与其他模型产生干涉ꎬ这两个操作相对来说是比较耗时的ꎬ因此模型试爆炸的次数直接影响自动爆炸的速度ꎬ而试爆炸的顺序直接影响需要试爆炸的次数ꎮ为了减少模型的试爆炸次数ꎬ提高计算效率ꎬ本文提出了一种基于装配约束关系的爆炸顺序分层方法ꎮ该方法首先以基体模型建立根节点ꎬ接着找到与基体模型存在装配约束关系的所有模型作为树的一级节点ꎮ然后遍历所有一级节点模型ꎬ寻找与一级节点模型有装配约束关系但是不在树中的模型ꎬ以此类推ꎬ直到所有需要爆炸的模型节点都在树中ꎮ2212020年第49卷㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀以图1中模型为例ꎬ将底座设为爆炸的基体ꎬ建立一个树结构ꎬ将底座设为树结构的根节点ꎬ接着找到所有与底座有装配约束关系的零部件ꎬ即端盖㊁支架盖㊁螺钉和定位销ꎮ然后遍历树结构的第一层ꎬ可以发现与端盖有装配约束关系的模型有垫圈和螺塞ꎬ与支架盖有装配约束关系的模型有螺钉和垫圈ꎮ此时可以形成如图2左侧所示的装配约束树结构ꎬ首先可将所有的叶子节点进行试爆炸ꎬ即将所有的螺钉㊁垫圈㊁螺塞和定位销进行试爆炸ꎬ去除这些节点后的装配约束树以及后续的去除步骤如图2右侧所示ꎮ按以上顺序试爆炸时ꎬ可以在一定程度上减少模型试爆炸次数ꎬ提高爆炸速度ꎮ图2㊀爆炸顺序分层确定方法2.2㊀基于微位移和碰撞检测的爆炸方向确定零部件爆炸顺序分层确定后ꎬ针对每一层的零部件ꎬ通过基于微位移和碰撞检测的方法来确定爆炸方向ꎮ该方法将需要爆炸的模型依次沿X+㊁X-㊁Y+㊁Y-㊁Z+㊁Z-6个标准方向进行微小的移动ꎬ并在移动后检测模型是否与其他模型有干涉ꎬ如果移动之后没有发生干涉ꎬ则该方向可以爆炸ꎮ每一个模型在6个方向上进行微位移和干涉检测的结果有以下几种情况:1)模型有0个可爆炸方向ꎮ此时ꎬ先跳过该模型去尝试爆炸其他模型ꎬ等其他模型爆炸完成后再次尝试该模型是否有可爆炸方向ꎮ2)模型有1个可爆炸方向ꎮ将该方向设定为该模型的爆炸方向ꎮ3)模型有2~6个可爆炸方向ꎮ在这种情况下有多个符合要求的爆炸方向时ꎬ需要选择一个最优的方向将模型移动初始的爆炸距离ꎮ最优的方向一般为在该方向上可以爆炸但在其反方向不可以爆炸的方向ꎮ如果存在多个这样的最优方向ꎬ则选择其中的一个最优方向作为爆炸方向ꎮ如果没有最优的爆炸方向ꎬ则选择任意一个可爆炸方向即可ꎮ如图3(a)所示ꎬX+㊁X-㊁Y+㊁Z+㊁Z-均为端盖的可爆炸方向ꎬ由于端盖在Y-方向上不可爆炸ꎬ所以Y+方向为最优的方向ꎮ在图3(b)中ꎬX+㊁X-㊁Y+㊁Z+均为支架盖的可爆炸方向ꎬ由于Y-㊁Z-方向均不可爆炸ꎬ所以Y+㊁Z+方向均为最优的爆炸方向ꎮ此时Z+和Y+方向都是比较理想的爆炸方向ꎬ在这种情况下选择第一个得出的最优爆炸方向即可ꎮ在图3(c)中套筒有Y+㊁Y-两个可爆炸方向ꎬ但是没有最优爆炸方向ꎬ此时选择任意一个可爆炸方向即可ꎬ此处选择第一个得出的爆炸方向ꎬ即Y+方向为最优爆炸方向ꎮ图3㊀最优方向确定2.3㊀基于包围盒的爆炸距离计算在自动爆炸时ꎬ确定了模型的爆炸方向后ꎬ需要将模型按照计算的方向移动一个预定的距离ꎬ这个距离就是模型的单层爆炸距离ꎮ为了能够使预定的爆炸距离对不同的模型都有较好的可利用性ꎬ单层爆炸距离需要按照模型的外形尺寸计算得出ꎮ根据多次实验及结果评估ꎬ可知将单层爆炸距离定为模型的包围盒的长㊁宽㊁高的平均值的1/2能够达到较好的效果ꎮ计算单层爆炸距离的公式为:Lenaven=13(L+W+H)(1)exp(lDis)=Lenaven2(2)式中:LꎬWꎬH分别为模型包围盒的长㊁宽㊁高ꎻLenaven为模型包围盒边长的平均值ꎻexp(lDis)为计算得出的单层爆炸距离ꎮ3㊀应用实例基于上述算法ꎬ笔者利用VisualStudio开发环3212020年第3期㊀㊀㊀㊀㊀㊀㊀㊀㊀马永敬:基于CATIA模型的自动爆炸图制作方法研究境并配合CATIA提供的AutomationAPIꎬ开发了爆炸图工具ꎬ该爆炸图工具包括爆炸场景管理模块㊁模型树设置模块㊁爆炸方向计算模块㊁总体爆炸参数设置模块㊁节点爆炸参数设置模块以及二次爆炸模块ꎮ图4所示为爆炸图制作界面ꎬ图5所示为某减速器模型的爆炸效果ꎮ图4㊀自动爆炸图界面图5㊀自动爆炸实例4㊀结束语本文基于CATIA开发的爆炸图自动生成工具已成功应用于高速轨道交通大型部件的装配工艺设计ꎬ提高了装配工艺设计的质量和效率ꎮ该算法的不足之处在于进行爆炸方向确定时依次按照6个标准方向进行微小的移动并不能覆盖所有情况ꎬ笔者接下来将对算法进行优化ꎬ以进一步提高自动爆炸图制作效率ꎮ参考文献:[1]㊀AGRAWALAMꎬPHANDꎬHEISERJꎬetal.Designingeffectivestep-by-stepassemblyinstructions[J].ACMTransactionsonGraphicsꎬ2003ꎬ22(3):828-837.[2]㊀MOTOMASAK.Explodedviewautomaticcreationapparatusꎬstor ̄agemediaandmethods:EP20050248560[P].2005-11-10. [3]㊀CORREACDꎬSILVERDꎬCHENM.Featurealignedvolumema ̄nipulationforillustrationandvisualization[J].IEEETransactionsonVisualizationandComputerGraphicsꎬ2006ꎬ12(5):1069-1076.[4]㊀BRUCKNERSꎬGROLLERM.Explodedviewsforvolumndata[J].IEEETransactionsonVisualizationandComputerGraph ̄icsꎬ2006ꎬ12(5):1077-1084.[5]㊀于嘉鹏ꎬ王成恩ꎬ张闻雷.基于装配序列规划的爆炸图自动生成方法[J].机械工程学报ꎬ2010ꎬ46(21):149-157. [6]㊀于嘉鹏ꎬ王健熙.基于递归循环的层次和爆炸图自动生成方法[J].机械工程学报ꎬ2016ꎬ32(13):175-188. [7]㊀邢宇飞ꎬ王成恩ꎬ于嘉鹏.基于蚁群算法的爆炸图自动生成方法[J].东北大学学报(自然科学版)ꎬ2012ꎬ33(6):883-886.[8]㊀赵鸿飞ꎬ张琦ꎬ王海涛ꎬ等.基于同步约束解除的零件爆炸图自动生成方法[J].中国机械工程ꎬ2015ꎬ26(1):70-73.ThemethodforautomaticgenerationofexplodedviewbasedonCATIAmodelMaYongjing1ꎬLiuGuangjun1ꎬAnShuai1ꎬMouLin1ꎬDuWeiping2(1.CRRCQingdaoSifangCo.ꎬLtd.ꎬShandongQingdaoꎬ266031ꎬChina)(2.SchoolofMechanicalandElectricalEngineeringꎬXidianUniversityꎬShaanxiXi'anꎬ710071ꎬChina)Abstract:Inviewoftheautomaticexplodedfunctionincommercialthree ̄dimensionalCADsystemꎬsuchasex ̄plodedincompletionꎬthepositionunreasonableꎬunableonceagainadjustmentꎬitproposesahierarchicalauto ̄maticexplodedmethodbasedonmicrodisplacementandcollisiondetection.Ittakestheassemblyconstrainttooptimizethetryexplodedsequenceꎬdividesthemodelsintomultipletryexplodedlayers.Aimingateverylayerꎬitdeterminestheexplodeddirectionbasedonmicrodisplacementandcollisiondetectionꎬobtainstheexplodeddistancebasedonboundingbox.ItdevelopsanautomaticexplodedviewgenerationtoolbasedonCATIAꎬandtakesaretarderassemblytoillustratethevalidityoftheproposedmethod.Keywords:automaticexplodedviewꎻexplodeddirectionꎻexplodeddistanceꎻcollisiondetectionꎻCATIA 4212020年第49卷㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀。
工业工程专业学科竞赛能力提升路径
第15卷第2期V ol.15No.22024年4月CHUANGXIN YU CHUANGYE JIAOYU Apr. 2024工业工程专业学科竞赛能力提升路径周春柳1,沈南南1,王元云2,曹建华1(1. 安徽工业大学管理科学与工程学院,安徽马鞍山,243032;2. 安徽工业大学化学与化工学院,安徽马鞍山,243032)[摘要] 工业工程专业是“新工科”建设的重点专业之一,工业工程专业人才培育必须以“新工科”提出的高素质复合型人才培养要求为目标。
以工业工程专业学科竞赛为切入点,基于对往届学科竞赛优秀作品和成果的调查分析,构建工业工程学科竞赛的能力需求矩阵,挖掘工业工程专业教学存在的共性问题,并依托SMART原则构建学科竞赛能力提升路径,形成“以赛促教、以赛促学”的教学模式,以培养专业能力突出、创新能力强的高素质复合型人才。
[关键词] 工业工程;学科竞赛;能力提升路径;教学模式[中图分类号] G420 [文献标识码] A [文章编号] 1674-893X(2024)02−0112−11一、引言创新创业教育有助于我国创新驱动发展战略的实施,学科竞赛既是培养学生创新实践能力的重要途径,也是培养高素质复合型人才的必要环节。
在智能制造时代,工业工程(Industrial Engineering,IE)作为一门助力企业提高产品质量、改善管理效率、降低生产成本、促进绿色发展转型的重要交叉学科,对学生的综合能力要求较高。
学科竞赛作为培养学生综合能力的重要途径之一,在培养交叉融合、知识扎实、能力全面、面向实践并敢于创新的专业型人才发挥了不可替代的作用,是工业工程专业“新工科”建设中的重要一环。
为推进“新工科”建设,学者们对培养符合“新工科”目标要求的工程科技人才进行了有益的探讨:高波等[1]提出通过学科竞赛等多种模式培养学生的实践能力,形成交叉融合的创新实践人才的培养机制;赵延明等[2]提出能力导向、竞赛驱动、成果评价的教学模式,培养适应经济社会发展的创新人才;武田艳等[3]构建了“基础理论—项目实践—学科竞赛—综合毕设”递进式教学体系,将学科竞赛作为教学的重要环节,创新赛教协同运行机制,形成协同育人模式;汪滨等[4]围绕学科竞赛和大学生创新创业项目构建了“项目依托、导师引领、本硕协同”的创新人才培养体系,为高校构建创新人才培养模式提供参考。
叩响机器人时代的大门——记合肥工业大学机械工程学院院长、机器人研究所所长訾斌

创新之路叩响机器人时代的大门——记合肥工业大学机械工程学院院长、机器人研究所所长訾斌 张方方 吴应清“到2025年,我国成为全球机器人技术创新策源地、高端制造集聚地和集成应用新高地;到2035年,我国机器人产业综合实力达到国际领先水平,机器人成为经济发展、人民生活、社会治理的重要组成。
”这是我国《“十四五”机器人产业发展规划》中明确提出的发展目标。
合肥工业大学机械工程学院院长、机器人研究所所长訾斌教授从事刚柔耦合智能机器人理论、技术与装备研究多年,他认为机器人技术正在深刻改变着人类的生产和生活方式,而随着机器人应用场景的持续拓展,机器人时代进程将被大大推进。
近年来,智能分拣、智能配送、智能搬运等大批“机器人快递员”问世;医疗机器人上岗范围从病房巡诊、康复训练、手术辅助拓展到智能消杀、核酸检测;水下仿生机器人正逐渐取代潜水员承担水文监测、目标搜救等任务;中国空间站机械臂惊艳全球……但机器人应用发展远不止如此,2023年1月,工信部等17部门印发的《“机器人+”应用行动实施方案》中明确指出,要面向社会民生改善和经济发展需求,遴选有一定基础、应用覆盖面广、辐射带动作用强的重点领域,聚焦典型应用场景和用户使用需求,开展从机器人产品研制、技术创新、场景应用到模式推广的系统推进工作,并支持一些新兴领域探索开展机器人应用。
“人类对机器人网络化、极端化、智能化、绿色化、共融化的期望值越来越高。
”訾斌说。
在他看来,“机器人+”应用前景广阔,要立足国家与经济社会的需求,抓住这个发展良机,方能不负时代。
从星河中走来“我们做科研要仰望星空,又要脚踏实地,在追寻梦想的同时不忘服务于国家需求。
”訾斌由衷地说。
他的科研之路正是从“仰望星空”开始的。
早在1995年,第三届国际大射电望远镜工作组会议上,西安电子科技大学段宝岩院士所做的关于大射电望远镜馈源支撑的光机电一体化创新报告,就受到了国内外专家的高度关注。
这个报告照进现实,扎扎实实地解决了中国天眼(FA S T)项目中最大的难点——馈源舱及其支撑结构系统问题,将天眼馈源舱的重量由万吨降低到30吨,被誉为“变革式创新”。
西安市科学技术局(外国专家局)关于认定第五批西安市国际科技合作基地的通知

西安市科学技术局(外国专家局)关于认定第五批西安市国际科技合作基地的通知文章属性•【制定机关】西安市科学技术局•【公布日期】2024.09.13•【字号】•【施行日期】2024.09.13•【效力等级】地方规范性文件•【时效性】现行有效•【主题分类】国际科技合作正文西安市科学技术局(外国专家局)关于认定第五批西安市国际科技合作基地的通知各区县、西咸新区、各开发区科技管理部门、各有关高校院所,各有关单位:根据《西安市国际科技合作基地认定管理办法》(市科发〔2023〕8号)的有关规定,今年我局开展了第五批西安市国际科技合作基地的申报、认定工作。
经过评审、考察和公示等环节,现认定西安交通大学等单位申报的49家国际科技合作基地为第五批西安市国际科技合作基地(名单详见附件)。
市科技局根据《西安市国际科技合作基地认定管理办法》,将进一步加强市级国际科技合作基地建设工作的监督,各基地按要求认真组织实施,建立健全国合基地管理制度,专人负责国合基地日常管理,在开展对外交流合作时要严格遵守国家外事规定,遇重大事项应及时向市科技局报告。
各单位要围绕秦创原创新驱动平台建设,结合西安重点产业链创新发展需求,重视加强人才培养,优化团队建设和运营管理,不断拓展国际科技交流渠道资源,实现高端人才与先进技术引入。
基地要服务我市“一带一路”科技创新合作,建立和加强驻市高校、科研院所国合基地与“一带一路”共建国家在双方共同关注的优势领域,打造一批具有显著凝聚力和影响力的国际科技合作平台,形成科技资源开放共享,创新人才交流互动的科技合作网络平台,促进技术转移和成果转化,切实发挥基地服务我市经济社会高质量发展作用。
附件:第五批西安市国际科技合作基地名单西安市科学技术局2024年9月13日附件:第五批西安市国际科技合作基地名单。
电子科大机械工程培养方案

电子科大机械工程培养方案一、培养目标电子科技大学机械工程专业侧重于培养具有扎实的工程基础理论和实践能力的高素质工程技术人才。
学生毕业后应能够在机械设备制造、机电一体化、机械设计与制造等领域从事科研、设计、制造、管理和实际应用等方面的工作,具有较强的工程实践能力和创新能力,具备较高的科学素养与人文素养。
二、培养计划1. 专业课程设置1.1 基础课程(1)高等数学、线性代数、概率统计(2)工程力学、材料力学、工程热力学(3)机械原理、机械设计、机械制图(4)电路原理、电工电子技术1.2 专业核心课程(1)机械工程制造基础、机械工程制造实践(2)机械设计基础、机械设计计算、机械设计实践(3)自动控制原理、传感器技术、自动化系统原理(4)领域相关的专业选修课程1.3 实践教学(1)实践教学包括机械设备制造、CAD/CAM技术应用、智能制造技术等(2)毕业实习2. 课程实施2.1 基础课程的开设旨在打下学生的学科基础,包括数学、物理、力学、电路等,为后续专业课程的学习做好准备。
2.2 专业核心课程的开设旨在培养学生的专业技能,包括机械设计、制造、自动控制等。
2.3 实践教学通过实验、实训、毕业设计等形式进行,培养学生的动手能力和实际操作技能。
3. 实践与创新电子科技大学机械工程专业鼓励学生积极参与科研活动和创新实践,不断提高自身的科研能力和创新能力。
学校为学生提供了一系列的创新实践平台,如学生科技创新实践中心、学生双创基地等,鼓励学生参与科研项目和创新创业竞赛,提升学生的实践能力和创新精神。
4. 专业实践能力培养4.1 实习实训学校与相关企事业单位合作,为学生提供实习机会,使学生能够在实践中学习、提高实践能力,并为将来的就业和创业打下良好的基础。
4.2 毕业设计学校鼓励学生以工程项目或实际问题为目标,通过设计、实验、分析等途径解决问题,培养学生的团队合作能力和创新能力。
5. 课程质量保障为保证专业课程实施的质量,学校设置了专门的教学督导机构,定期对课程进行评估和调整。
《计算机集成制造系统》理事会

《计算机集成制造系统》理事会理事长:清华大学国家CIMS工程技术研究中/心副理事长:中国兵器工业集团第210研究所四川省现代服务科技研究院常务理事:福州大学机械工程及自动化学院上海海事大学物流科学与工程研究院同济大学控制科学与工程系上海海事大学物流工程学院中国科学院软件研究所云南大学软彳学院北京工业大学机电学院中国科学院科技战略咨询研究院北京交通大学中国高端制造业研究中究究'天津大学机械工程学院上海交通大学设计学院广东工业大学计算机学院理事:上海交通大学CIMS研究所范秀敏西安交通大学中国西部质量科学与技术研究院高建民北京航空航天大学机械工程自动化学院郑联语同济大学CIMS研究中心王坚北京理工大学机械与车辆学院王国新国家技术创新方法与实施工具工程技术研究中心檀润华华中科技大学机械科学与工程学院王峻峰山东大学机械工程学院李方义浙江工业大学工业设计研究所卢纯福广东工业大学陈新山东省智能制造与控制系统工程技术研究中心胡天亮辽宁工程技术大学软件学院沈学利华侨大学计算机科学与技术学院王成重庆交通大学经济管理学院智能物流实验室葛显龙北京交通大学高速铁路网络管理研究中心刘峰上海海事大学交通运输学院沙梅武汉理工大学机电工程学院杜百岗吴忠仪表有限责任公司郭伟大连理工大学管理与经济学部黄学文郑州轻工业学院机电工程学院罗国富华侨大学机电及自动化学院江幵勇西南交通大学交通运输与物流学院张锦河北工业大学机械工程学院张小俊成都飞机工业(集团)有限责任公司许旭东北京航空航天大学系统工程学院黄婷婷武汉理工大学电子商务与智能服务研究中心危小超河海大学常州校区物联网工程学院何坤金天津科技大学机械工程学院张峻霞华南理工大学机械与汽车工程学院姚锡凡国家工业信息安全发展研究中/心窦克勤大连交通大学交通运输工程学院谢素明重庆工商大学制造装备机构设计控制实验室杜彦斌江苏科技大学经济管理学院韩文民广西大学制造系统与先进制造技术实验室邓建新重庆理工大学管理学院宋寒中国船舶重工集团公司第714研究所张祖国济南大学商学院刘乐江苏理工学院机械工程学院徐旭松浙江工业大学机械工程学院李研彪江苏科技大学机械工程学院景旭文新疆大学机械工程学院袁逸萍太原科技大学工业与系统工程研究所张晓红哈尔滨理工大学经济与管理学院单子丹湖北经济学院工商管理学院冷凯君沈阳工业大学机械工程学院姜兴宇重庆工商大学管理科学与工程学院陈久梅南方科技大学机械与能源工程系融亦敏山东科技大学能源学院工业工程系贾顺江西理工大学经济与管理学院许菱山东大学机械工程学院姜兆亮北京邮电大学数字媒体与艺术设计学院侯文军西安理工大学自动化与信息工程学院刘涵山东科技大学计算机学院鲁法明大连理工大学机械工程学院孙清超中南林业科技大学物流与交通学院庞燕东莞理工学院机械工程学院李川哈尔滨理工大学机械与动力工程学院于广滨中国石油大学(华东)经济与管理学院安贵鑫浙江理工大学机械与自动控制学院鲁玉军北京印刷学院机电工程学院齐元胜重庆工商大学国家智能制造服务合作基地苏加福武汉理工大学物流工程学院曹小华山东大学现代物流研究中心究吴耀华中南大学自动化学院阳春华江苏大学管理学院杜建国中国航空制造技术研究院王湘念浙江工业大学机械工程学院工业工程研究所裴植天津理工大学先进机电系统设计与控制实验室刘振忠华北水利水电大学工业工程与精益管理研究所黄毅敏重庆邮电大学现代邮政学院蹇洁北京物资学院信息学院李珍萍吴澄刘景利孙林夫朱光宇杨勇生李莉徐子奇刘伟朱锐刘志峰郭剑锋朱明皓王磊董占勋程良伦暨南大学物联网与物流工程学院山大地纬软件股份有限公司中国工程物理研究院机械制造工艺研究所湖北工业大学机械工程学院西安科技大学机械工程学院大连交通大学机械工程学院中国矿业大学矿业学院工业工程系中国航空综合技术研究所嘉兴学院机电工程学院山东科技大学经济与管理学院宁波大学商学院广西科技大学机械与交通工程学院北京交通大学经济与管理学院桂林电子科技大学机电工程学院聊城大学机械与汽车工程学院湘潭大学机械工程学院南昌大学管理学院南京航空航天大学机电学院西北工业大学智能工业与信息化研究所华南农业大学工程学院山东建筑大学机械工程学院汕头大学工学院机械工程系天津工业大学机械工程学院上海理工大学管理学院中国信息通信研究院信息化与工业化融合研究所武汉大学土木建筑工程学院佛山科学技术学院机电工程与自动化学院西华大学机械工程学院南京林业大学机械电子工程学院东北林业大学机电工程学院武汉科技大学恒大经济管理学院中南大学机电工程学院海南大学管理学院天津职业技术师范大学机器人及智能装备研究院重庆大学经济与工商管理学院中科万勋智能科技(苏州)有限公司杭州电子科技大学上虞科学与工程研究院有限公司北京交通大学机械与控制工程学院沈阳工业大学管理学院聊城大学计算机学院中国计量大学经济与管理学院三峡大学机械与动力学院烟台大学计算机与控制工程学院重庆工商大学企业管理研究中心深圳技术大学城市交通与物流学院西安邮电大学现代邮政学院中国农业大学工学院太原科技大学机械工程学院武汉科技大学汽车与交通工程学院哈尔滨工程大学船舶工程学院北京理工大学经济与管理学院上海第二工业大学工学部北京信息科技大学信息管理学院南京工业大学机械与动力工程学院山东大学工业工程研究所华侨大学信息科学与工程学院中国海洋大学信息科学与工程学院北京化工大学信息科学与技术学院沈阳航空航天大学航空宇航学院华东交通大学运输与物流学院齐鲁工业大学(山东科学院)自动化研究所国防科技大学智能科学学院山东理工大学计算机科学与技术学院中南大学交通运输工程学院四川大学化学工程学院过程系统工程研究所福州大学经济与管理学院中国电子科技集团公司第十研究所供应链部北京理工大学机械与汽车学院华北电力大学中国能源经济管理研究中心长安大学汽车学院东北大学工商管理学院挺良杰德辉伟鹏扬敏振升健伟宇福春颖威红军奎杰骥军敏颂华明斌敏东林达明梅彬清强晔燕香发波伟婷洁敏鹃胜滨果辉森华栋亮松兵生华珂喜聪兵利华戈琳晓毅伟玉道旭明玉慧卫碧国兴安继开军红清永良来振清志旭奉宇旭万增晓红玉元宏逢保敬仰国继树其福军国建宇东绪屈史林张张朴李胡高饶杜李华高郭吴曹田何王陈赵陈赵朱陈卢封吴付邓韩赵祁张郑李蒋周桑杨董孙陈张谢周杜应唐李杨张王于罗于靳邱郭苏李刘易周黄周宫牛韩秦。
机电一体化与机械制造智能化技术的融合分析
机电一体化与机械制造智能化技术的融合分析摘要:进入新时代,在我国高速发展的背景下,带动了社会经济水平提升,科学技术也随之进步。
近年来,机电一体化在智能制造中具有应用优势,可以促进我国企业的快速发展,优化企业产品的生产模式,并使产品质量实现“质”的提升,保障企业的核心竞争力。
技术人员要考虑机电一体化技术的工作原理,并结合机电一体化技术在制造中的优势,使传统制造具有智能化、自动化的特点。
机电一体化技术的发展,将会进一步提升我国机械制造的水平,保障社会生产力,实现社会经济、信息共享化。
关键词:机电一体化技术;智能制造;应用引言为全面推动智能控制技术应用发展,要积极整合技术要点,发挥其优势作用,共同促进机电一体化系统转型升级。
本文分析智能控制的特点、分类以及实际应用价值,并对机电一体化中智能控制的应用内容展开讨论。
1机电一体化技术相关现状简述随着我国科学技术不断的发展和持续的进步,传统的机械制造早已经不再适用,而当下的电气自动化技术正在逐步与传统的机械制造进行技术上的结合,因此机电一体化技术应运而生。
机电一体化技术包含传感技术、数控技术、自动化生产技术和智能化机器人技术等等相关的生产加工技术,但是由于过去的自动化技术在信息化时代发展一般,因此在很多方面只能暂时维持半自动化的状态。
因此,这些相关生产设备确实能够大批量地生产应急产品,但是特别是在一些出现紧急故障的情况下,却往往需要非常繁重的人工进行检查和修理,并不能够在短时间内进行自我良好的应急处理或者进行及时的报警。
这就导致在一些检修工作或者是故障排除的相关工作上不能够及时的进行,最终导致出现非常严重的事故发生,并且大大地提升了相关机械仪器设备的日常损耗,导致需要频繁进行检查和保修,从而保证日常稳定和持续的生产加工操作。
比起传统的机械加工生产操作当中的人工操作所保持的低效率运行,当下的机电一体化技术虽然操作较为简易并且模式非常简单,但是却能够很好地保障人员在进行相关的技术性编程的过程当中,编程和仪器设备不出现问题的情况下,机械可以依照相关的程序进行精度相当、形状基本相同、误差较小的大批量零部件的生产和加工,这对于当下疫情当中,紧急大批量生产、以及大量需要频繁更换的零构件进行替换件的生产加工是非常重要的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能制造与工业大数据研究团队
团队负责人孔宪光
团队成员
团队简介
该团队现有教师25人,顾问8人,博士研究生11人,硕士研究生70余人,形成了一支机械、数学、计算机、管理等学科交叉融合,数字化、可靠性、健康管理、仿真、统计分析、大数据、人工智能等技术交叉融合团队。
承担了国家科技重大高端装备专项、国家发改委大数据专项、国家工业互联网平台专项、工信部智能制造项目、教育部、国防科工局、军委装备发展部、国家自然基金、省科技统筹创新及国际合作交流专项、省教改项目等,获得了省科技进步奖、省教学成果奖等,授权受理专利40多项,软件著作权近20项。
建立了陕西省电子装备虚拟仿真实验教学中心,陕西省研究生联合培养示范工作站(西电-上海航天精密机械研究所可靠性与虚拟仿真人才培养示范工作站),西电-800可靠性试验与仿真联合实验室,西电-美国堪萨斯州立大学质量大数据联合技术研究中心,西电-紫光
云引擎工业互联网与工业大数据联合研发中心,西电-顶逸轨道交通及工业大数据联合实验室,西电-中铁盾构工业大数据联合技研究中心,并与国际知名的工业大数据机构IMS紧密合作。
中心积极开展产学研合作,与航天800所、空军装备研究院、中铁一局、西电集团、中兴通讯、航天15所、中电29所、中电27所、中电深科技、航空430厂、西门子、陕鼓、清华紫光、网易、新华三等公司在内的10余家单位建立了密切合作关系。
参加中国信息通信研究院主办的首届工业大数据创新竞赛,阿里云-天池工业大数据竞赛,取得了不错的比赛成绩。
围绕国家智能制造与中国制造2025的军民重大需求,中心正逐步将智能制造成果拓展应用于航空航天、电子电器、高端装备智能制造、城市地下空间工程智慧建造等领域,推动中国工业转型升级,培养新工科跨学科人才,致力于产学研成果转化并成为国内有影响力的智能制造与工业大数据研究中心!
人才、重要成果及奖项
1.国务院政府特殊津贴专家、陕西省有突出贡献专家:仇原鹰
2.华山学者讲座教授、美国辛辛那提大学杰出教授:李杰
3.兼职教授、上海航天800所副所长:李中权
4.兼职教授、西电研究院总经理:康鹏举
5.兼职教授、西安交通大学教授、博导:王军平
6.陕西省智能制造专家委员会委员,陕西省大数据与云计算创新联盟理事,陕西省信息技术标准化技术委员会委员,陕西省军民融合专家
体委员,陕西省工业大数据规划专家、中铁一局专家,网易工业互联网与工业大数据顾问、镇江市现代服务业领军人才: 孔宪光
7.国家科技进步奖二等奖:面向全性能与全系统的天线结构机电综合优化与精密控制研究
8.国家科技进步奖二等奖:反射面天线的电磁、结构与控制集成设计及其应用
9.陕西省科学技术奖二等奖:动态大变形服役环境下大飞机机翼液压管路耐久试验系统及关键技术
10.国家科技重大高端装备专项:航天成套制造装备可靠性评估系统研究、面向航天复杂薄壁轻合金构件精密成形装备示范线的工业大数据研究、航天钛合金构件国产高档数控装备与关键制造技术应用示范运载火箭箭体结构制造关键成套装备与工艺、运载火箭国产五轴数控机床和数控系统规模化示范应用
11.国家发改委大数据专项:城市地下空间工程大数据智能分析与公共服务平台建设,国家首批支持的38个项目之一,陕西省唯一一项,并获得2017年好设计金奖
12.工信部智能制造项目:质量大数据分析系统、质量大数据标准及验证、智能工厂仿真标准
13.教育部项目:基于工业互联网的离散制造业大数据分析与协同管理研究、工业大数据创新应用技术研究
14.国防科工局:XX机电产品高加速筛选试验关键技术研究、多点激励振动试验系统建模与软件平台开发、XX多轴振动应力筛选试验关
键技术研究
15.军委装备发展部:多应力条件下机电装备加速试验技术研究
16.陕西省科技项目:面向输配电装备制造业的试验检测服务平台研发及示范、面向输配电装备制造行业的“试验检测云”、质量大数据分析系统、开关设备运行故障(缺陷)的影响因素数据分析及挖掘
主要研究方向
1.基于大数据的智能产品(装备)可靠性评估与PHM技术
针对传统装备可靠性计算与评估手段单一,经验曲线与实际情况不符等问题,研究基于大数据的智能产品(装备)可靠性评估技术,形成多维度部件级/系统级功能与性能的计算模型和评估方法;针对PHM依赖单一信号处理,物理模型与数据模型未融合等问题,研究基于大数据的智能产品(装备)PHM技术研究,形成故障影响因素分析、状态监测、健康评估、故障预测等分析模型和计算方法。
进一步研究可靠性评估与PHM的融合技术,形成独特智能产品(装备)大数据分析技术。
2.面向智能制造的质量大数据分析技术
面向智能制造中的“人机料法环测管”等海量异构数据,传统质量管理手段无法满足实时、动态、预测等分析需求,研究质量追溯影响因素分析、最佳工艺参数优化推荐、质量问题预测预警、质量趋势与良率预测、质量控制阈值优化等,形成产线级、车间级、工厂级、集团级质量大数据分析模型,为电子电器、国防军工等行业应用大数据分析提升质量提供支撑。
3.基于工业大数据的生产线运行可靠性评估理论和方法
首先,对生产线可靠性大数据进行处理与重构,形成高质量可靠性数据包;其次,运用大数据分析技术和深度学习技术,研究装备运行可靠性建模与分析方法,建立动态实时装备可靠性分析模型;最后,以大数据驱动深度挖掘产品质量指标与可靠性指标的关联规律,将二者指标融合为生产线的可靠性评估指标,完成面向产品质量的生产线可靠性综合评估并在企业验证,为生产线高效可靠运行提供的可靠性理论基础和评估方法支持,更好地满足智能制造下生产线的高工艺稳定性和高可靠性制造需求。
4.多应力环境与可靠性试验大数据分析技术
针对武器装备试验系统的精确认识和有效控制需求,开展基于大数据分析和虚拟仿真的试验技术研究,掌握传感器布局与数据传输存储,智能挖掘算法等技术,实现多源试验数据集成、分析与监控,建立基于试验大数据分析方法的多应力试验综合平台,为型号产品多应力环境与可靠性试验提供新的理论和技术。
5.面向产品全生命周期、产业链、跨产业链的工业大数据分析技术
围绕产品全生命周期的研发、工艺、制造、试验、使用等数据,研究面向某一主题的跨阶段闭环大数据分析技术;围绕企业供应商、客户等产业链数据,研究供应链优化、客户画像、供应商评价等大数据分析技术,形成产业云图;围绕工业与金融、安全、气象、商业等跨界数据,研究企业征信评估、安全监管、个性化定制等跨界分析技术。
6.面向智慧建造的盾构施工大数据分析技术
我国地下空间工程(例如地铁、综合管廊等)发展迅猛,针对地下盾构施工风险难以有效预测、质量无法动态控制、装备健康管理困难那等行业迫切需求,开展地下盾构施工大数据分析技术研究,突破地下盾构施工数据演化规律、盾构装备健康管理、不良地面沉降预测、异常工况预警、轴线纠偏分析、管片拼装评估等关键技术,为大数据在智慧建造中应用提供基础理论和应用技术。
7.多模态融合的工业大数据分析平台
研发领域知识、业务流程、机理建模、物理建模、信号处理、统计学习、机器学习等深度融合,支持面向历史数据、实时数据、混合数据等多种计算平台,实现描述性分析、规定性分析、诊断性分析、预测性分析、指导性分析的工业大数据建模工具。
智能感知实际运行的状态数据建立多工况多场景的仿真模型,基于深度学习方法驱动运行仿真模型的进化与修正,从而通过虚实映射实现实时仿真。
8.基于数字孪生的CPS系统构建与分析方法
围绕现有数字化平台信息割裂,异构模型难以交互,数字链演化机理不明、认知计算困难等问题,研究研发、制造、运维、试验、施工等环节的数字孪生体设计技术,建立业务过程同步高逼近映射,提供数字链价值传递演化机理,研究异构对象互操作建模规范,构建虚实映射的CPS系统。
基于CPS系统开展单元级、系统级、SOS级的大数据分析方法研究,提供面向装备、个体、群体、产业链场景下的CPS应用体系。
9.基于人工智能的工业大数据分析方法
面向工业结构化数据、时序数据、图像数据、视频数据、声音数据、日志文件等多源异构数据,构建工业级人工智能算法库和人工智能芯片,研究多源异构数据融合分析与验证方法,为人工智能技术应用于工业大数据分析提供理论支撑,同时为CPS系统向机器智能,人机协同智能等三元智能系统发展提供技术支撑。
10.机械CAD/CAE/CAM
将传统的机械设计、力学分析与先进的计算机设计、分析软件相结合,面向机械工程领域中设计、分析与优化等方面的科学研究和工程技术问题,进行建模、仿真、分析、优化与验证。
相关技术与研究所和生产厂的先进数字化设计及制造工作相匹配。
图1舱段自动对接测量原型系统
图2电路板的建模与热振耦合仿真
11.机电一体化
侧重于机械系统的动力分析与运动控制。
在机器人运动学、动力学与控制等方面进行深入理论研究和模型实验。
相关技术可应用于并联机构的运动控制、智能机器人加工与装配。
图3 大飞机机翼液压管路动态大变形耐久试验系统
博士/硕士招生(详见招生简章)。