气动行程程序控制系统图共36页文档
合集下载
简单气路设计(共36张PPT)
1个
两位三通单气控
1个
堵头、气管若干
要求:气缸在伸出与缩回状态都能长时间自保持,无须用手长按。
第11页,共36页。
答案3
两位三通阀除用来控制单作用气缸外,也常用作选择阀和分配阀使用。
对于封闭的气动回路进行高低压转换时,如从高压转换成低压,则必须排 出多余的压缩空气。此时需要用溢流阀和减压阀组合来实现。
答案8
实用气路设计 1、设计一个检验试台(如检测电磁阀),装置如图所示 2.)当按下3进气变为高压。试设计以下气路。
K1
K2
K3
第31页,共36页。
实用气路设计 2、设计一个检验试台(如检测调压阀),装置如图所示
动作原理:当开启手动阀,A、B缸,进气处同时动作把检测物夹紧并通气, 在测试过程中可通过脚踏阀进行断排气。
向电信号可为脉冲信号, 杆伸出。右侧电磁铁通电
因此电磁铁发热少,并 时,活塞杆缩回。左右侧
具有断电保持功能
电磁铁同时断电时,活塞 可停止在任意位置,但定
位精度不高
当电磁阀处于中间位置时 活塞杆处于自由状态,可 由其他机构驱动
第13页,共36页。
双作用气缸控制回路
气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用两位五通阀来控制。
第32页,共36页。
答案9
实用气路设计 3、设计一个开门机构 动作原理:现有一粮仓,共有两种车分大车和小车来搬粮食,要求当小车来的时候门只开一半,大 车来的时候门全开。由于设备相对简陋,需人员在现场操作。 要求:
1、选择合适类型的气缸 2、选择合适类型的阀并设计该回路
3、开门动作要求速度缓慢且平稳
b、利用气缸结构的位置控制 使用多位气缸,可实现多点位置控制,其基本构成如图所示。气缸A、B、C的行程各不相同。当三 通换向阀1通电时,气缸A的活塞杆推动活塞B、C伸出,到达气缸A的行程终点。当三通电磁阀2通 电时,活塞A保持不动,活塞C向右移动。
气动程序控制系统
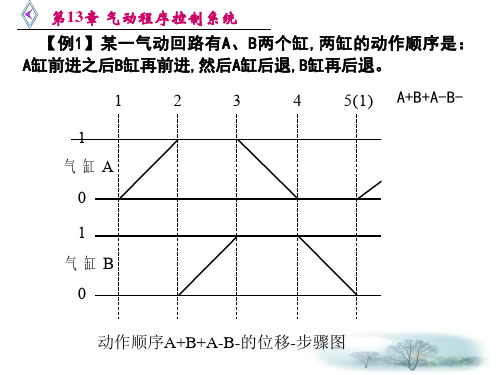
第13章 气动程序控制系统 章 ④ B缸后退压下行程开关b0,输出的信号使A缸后退, 故b0接在A-控制线上。 而A-属于第二组,故b0的供气口 接在第II条输出管路上。 ⑤ A缸后退压下行程开关a0,输出的信号切换记忆 元件使第II条输出管路排气,第I条输出管路供气,故a0应 接在x1控制线上,a0的供气口则要接在第II条输出管路 上。 将以上控制顺序表示为 I条输出管路 A+ a1 B+ b1 x2
气气A
0 1
气气B
0 1
气气C
0
图13-51 位移-步骤图
第13章 气动程序控制系统 章 设计步骤如下: 将顺序动作分组为 A+B+/B-A-C+/CⅠ Ⅱ Ⅰ
动作顺序分为两组,整个回路的控制顺序为 1S1 A+ a1 B+ b1 x2 第II条输出管路 B-
b0
A-
a0
C+ c1 x1 第I条输出管路上 C-
第13章 气动程序控制系统 章 【例13-3】 A、B两气缸的位移-步骤图如图13-41 所示,试用串级法设计其气动回路图。 设计步骤如下: (1)按气缸动作顺序A+B+B-A-分组,分组的原则 是同一组内每个英文字母只能出现一次。 分组的组数 即是输出管路数。 分组的组数越少越好,即 A+B+/B-AⅠ Ⅱ (2) 画出两个气缸及各自的主控阀,并标出英文 符号,应注意气缸必须在起始位置。 (3) 画出输出管路数及记忆元件,如图13-48所 示。
a0 A a1 B b0 b1
1V1 4 A+ 5
2 A- 3 1 b0 2 a1 1 3 2 1
2V1 B+
4 5
2 B- 3 1
气动行程程序控制系统图
§7-5
障碍信号的判别及消除
一、X—D线图判别障碍 线图判别障碍
1、控制信号线比它所控制的动作状态线短 、 →无障碍; 无障碍; 无障碍 2、控制信号线比它所控制的动作状态线 、 有障碍; 长→有障碍; 有障碍 3、控制信号线与它所控制的动作状态线基 、 本等长,仅多出一出头部分→滞消障碍 滞消障碍(自 本等长,仅多出一出头部分 滞消障碍 自 行消失,无需消除) 行消失,无需消除
二、串联回路——逻辑与 串联回路 逻辑与
LX1 1 LX2 2 J2 J1
LX3 3 J1 4 J4 5 图7-3 串联电路图 DFQ J2 J3
J3
J4
三、并联回路——逻辑或 并联回路 逻辑或
LX 1 1 LX 2 2 J2 5 J1 4
LX 3 3
J3 6
J1 4 J2 5
J4 7
J3 6
J4 7
LX2 J2 4,6 后退
DFQ1
J2 6
DFQ2
(a) 图7-9 气动缸往复运动回路及其操作电路
(b)
AN1 1 J1 2 AN2 3 J2 4 J1 5
LX1
J2
J1 2,5,3 前进
LX2
J1
J2 4,6,1 后退
DFQ1
J2 6
DFQ2
图7-10 先入优先电路
§7-3 障 碍 信 号
一、障碍信号的定义
m n
n
A
n是m的障碍信号
A1 A0 m
m n
A m是n的障碍信号 A1 A0 I型障碍 II型障碍
1、滞消障碍:障碍信号比控制信号出现时多存在一瞬间便 、滞消障碍:
自行消失(不需要排除,靠其自行消失 。 自行消失 不需要排除,靠其自行消失)。 不需要排除
第7章行程程序控制系统PPT课件
m*=m·x
制约信号x的起点应该位于障碍信号m开始之前, 且制约信号x的终点应选在障碍信号m的无障碍段中。
28
可编辑课件
第7章 行程程序控制系统
制约信号x的选择原则:尽量选用系统中的其他原 始信号作为制约信号x,这样可以避免增加气动元件; 选择其他原始信号的“非”信号;其他主控阀的输出 信号;用中间记忆元件(辅助阀)输出信号。
随着自动化设备的功能和工序越来越复杂,各工序之间 需要按一定的时间紧密巧妙地配合,要求各工序时间可在一 定时间内调节,这需要利用延时电路来加以实现。延时控制 分为两种,即延时闭合和延时断开。
如图为延时闭合电路,当按下开关PB后,延时继电器 T开始计时,经过设定的时间后,时间继电器触点闭合,电 灯点亮。放开PB后,继电器T立即断开,电灯熄灭。图1311b为延时断开电路,当按下开关PB后,时间继电器T的触点 也同时接通,电灯点亮,当放开PB后,延时断开继电器开始 计时,到规定时间后,时间继电器触点T才断开,电灯熄灭。
第7章 行程程序控制系统
位置发信装置:是一种发出位置(行程)信号的传感器(转换 器),通常是行程阀、喷嘴—挡板机构、行程开关等。此 外还有液位、压力、温度等的传感器也可作为位置发信 装置。 执行元件:和它联动的机构称为执行机构,常用的执行元 件有气缸(包括气—液缸)、气动马达、气动阀等。 逻辑控制回路:由气动方向阀或气动逻辑元件根据程序要 求的逻辑表达式组成。 动力源:由产生压缩空气的压缩机、分水滤气器、干燥器、 储气罐、调压阀、油雾器等组成。
图7—2为控制继电器的工作原理图,它是由按钮开关 (限位开关)、电磁铁线圈、触点、
接线柱等组成,通过按钮或限位开关使电磁铁线圈通电 励磁,吸合触点,使被控制的主回路闭合通电。这就是继电 器的工作原理和工作机能。
制约信号x的起点应该位于障碍信号m开始之前, 且制约信号x的终点应选在障碍信号m的无障碍段中。
28
可编辑课件
第7章 行程程序控制系统
制约信号x的选择原则:尽量选用系统中的其他原 始信号作为制约信号x,这样可以避免增加气动元件; 选择其他原始信号的“非”信号;其他主控阀的输出 信号;用中间记忆元件(辅助阀)输出信号。
随着自动化设备的功能和工序越来越复杂,各工序之间 需要按一定的时间紧密巧妙地配合,要求各工序时间可在一 定时间内调节,这需要利用延时电路来加以实现。延时控制 分为两种,即延时闭合和延时断开。
如图为延时闭合电路,当按下开关PB后,延时继电器 T开始计时,经过设定的时间后,时间继电器触点闭合,电 灯点亮。放开PB后,继电器T立即断开,电灯熄灭。图1311b为延时断开电路,当按下开关PB后,时间继电器T的触点 也同时接通,电灯点亮,当放开PB后,延时断开继电器开始 计时,到规定时间后,时间继电器触点T才断开,电灯熄灭。
第7章 行程程序控制系统
位置发信装置:是一种发出位置(行程)信号的传感器(转换 器),通常是行程阀、喷嘴—挡板机构、行程开关等。此 外还有液位、压力、温度等的传感器也可作为位置发信 装置。 执行元件:和它联动的机构称为执行机构,常用的执行元 件有气缸(包括气—液缸)、气动马达、气动阀等。 逻辑控制回路:由气动方向阀或气动逻辑元件根据程序要 求的逻辑表达式组成。 动力源:由产生压缩空气的压缩机、分水滤气器、干燥器、 储气罐、调压阀、油雾器等组成。
图7—2为控制继电器的工作原理图,它是由按钮开关 (限位开关)、电磁铁线圈、触点、
接线柱等组成,通过按钮或限位开关使电磁铁线圈通电 励磁,吸合触点,使被控制的主回路闭合通电。这就是继电 器的工作原理和工作机能。
电气动程序控制系统电气动程序控制系统
1.是门电路(YES)
是门电路是一种简单的通断电 路,能实现是门逻辑电路。图13-6 为是门电路,按下按钮PB,电路1 导通,继电器线圈K励磁,其常开 触点闭合,电路2导通,指示灯亮。 若放开按钮,则指示灯熄灭。
电气动程序控制系统电气动程序控制 系统
3、基本电气回路
2.或门电路(OR)
如 图 13-7 所 示 的 或 门 电 路 也 称 为并联电路。只要按下三个手动 按钮中的任何一个开关使其闭合, 就能使继电器线圈K通电。例如要 求在一条自动生产线上的多个操 作点可以进行作业。或门电路的 逻辑方程为S=a+b+c。
(1) 时间继电器(Timer)
电气动程序控制系统电气动程序控制 系统
2、电气回路图绘图原则
电气回路图通常以一种层次分明 的梯形法表示,也称梯形图。它是 利用电气元件符号进行顺序控制系 统设计的最常用的一种方法。梯形 图表示法可分为水平梯形回路图及 垂直梯形回路图两种。
如图13-5所示为水平型电路图, 图形上下两平行线代表控制回路图 的电源线,称为母线。
电气动程序控制系统电气动程序控制 系统
3、基本电气回路
3.与门电路(AND)
如图13-8所示的与门电路也称为串 联电路。只有将按钮a、b、c同时按下, 则电流通过继电器线圈K。例如一台设 备为防止误操作,保证安全生产,安装 了两个启动按钮,只有操作者将两个气 动按钮同时按下时,设备才能开始运行。 与门电路的逻辑方程为S=a.b.c
电气动程序控制系统电气动程序控制 系统
1、常用电气元件基本符号
电气控制回路主要由按钮开关、行程开关、继 电器及其触点、电磁铁线圈等组成。通过按钮或行 程开关使电磁铁通电或断电,控制触点接通或断开 被控制的主回路,这种回路也称为继电器控制回路。 电路中的触点有常开触点和常闭触点。
是门电路是一种简单的通断电 路,能实现是门逻辑电路。图13-6 为是门电路,按下按钮PB,电路1 导通,继电器线圈K励磁,其常开 触点闭合,电路2导通,指示灯亮。 若放开按钮,则指示灯熄灭。
电气动程序控制系统电气动程序控制 系统
3、基本电气回路
2.或门电路(OR)
如 图 13-7 所 示 的 或 门 电 路 也 称 为并联电路。只要按下三个手动 按钮中的任何一个开关使其闭合, 就能使继电器线圈K通电。例如要 求在一条自动生产线上的多个操 作点可以进行作业。或门电路的 逻辑方程为S=a+b+c。
(1) 时间继电器(Timer)
电气动程序控制系统电气动程序控制 系统
2、电气回路图绘图原则
电气回路图通常以一种层次分明 的梯形法表示,也称梯形图。它是 利用电气元件符号进行顺序控制系 统设计的最常用的一种方法。梯形 图表示法可分为水平梯形回路图及 垂直梯形回路图两种。
如图13-5所示为水平型电路图, 图形上下两平行线代表控制回路图 的电源线,称为母线。
电气动程序控制系统电气动程序控制 系统
3、基本电气回路
3.与门电路(AND)
如图13-8所示的与门电路也称为串 联电路。只有将按钮a、b、c同时按下, 则电流通过继电器线圈K。例如一台设 备为防止误操作,保证安全生产,安装 了两个启动按钮,只有操作者将两个气 动按钮同时按下时,设备才能开始运行。 与门电路的逻辑方程为S=a.b.c
电气动程序控制系统电气动程序控制 系统
1、常用电气元件基本符号
电气控制回路主要由按钮开关、行程开关、继 电器及其触点、电磁铁线圈等组成。通过按钮或行 程开关使电磁铁通电或断电,控制触点接通或断开 被控制的主回路,这种回路也称为继电器控制回路。 电路中的触点有常开触点和常闭触点。
气动系统设计ppt课件

12
五、选择气动辅件 (一)分水滤气器 其类型主要根据过滤精度要求而定。
(二)油雾器 根据油雾颗径大小和流量来选取。 (三) 消声器 可根据工作场合选用不同形式的消声器,其通径
大小根据通过的流量而定,可查有关手册。 (四) 储气罐 其理论容积可按第五章经验公式计算,具体结构、
尺寸可查《压缩空气站设计手册》。 六、确定管道直径、计算压力损失 七、选择空压机 (一)计算空压机的供气量Qj,以选择空压机的额定排气量 (二)计算空压机的供气压力,以选择空压机的排气压力
2.用带下标的小写字母a1 、a0、b1 、b0 等分别表示与动作A1、A0、B1、B0等相对应 的行程阀及其输出信号。
图
气缸、行程阀符号
3
3.右上角带*号的信号称其为执行信如
、、 、、、......等;而把不带*号的信号叫 做原始信号如 a0、b0……等 A1
2
二、气动行程程序回路的设计
(一)列出工作程序
( ) 气动机械手工作程序图之一
1
11
0
0
0
0
1
0
0
1
2
3
4
5
6
7
( ) 气动机械手工作程序图之二
图 14-5
程序
12 3 45 67执 行 信 号
组
1
1 1
表 达 式
0 0 10 0
1 ( 0 1 )
1
1 ( 1 ) 21
1 ( 1 )
1
( 0 ) 3
0
(二)绘制信号-动作状态线图(X-D线图)
( 0 0 ) 4
(五)对回路其它要求的设计 1.回路的复位及启动(图14-17) 2.手动及自动操作(图14-18) 3.联锁保护
纯气动控制系统_图文
阀门的基本功能是,为达到检测、信号处理和控制的 目的而改变、产生和消除信号。另外,阀门也可作为驱动 阀,供给执行机构所需的压旋钮开关)控制双作用气缸的伸出和回缩 ,使物体从传送带1到传送带2; ② 气缸伸出时间t=3s,回缩时间t=2.5s; ③ 压力表指示气缸活塞两端的压力; ④ 双作用气缸的初始位置在尾端(即必须在回缩到位)。
三.常见的逻辑阀
1.单向控制阀(单向阀):自行车打气,气门心就是单向阀。 2.或阀(梭阀) (1) 工作原理 (2) 图形符号(中间称之为“死点”)
(3) 应用:逻辑回路和程序控制回路中被广泛应用。 3.与阀(双压阀) (1) 工作原理 (2) 图形符号
三.常见的逻辑阀
4.延时阀 (1) 作用:使阀芯换向延时
振动料桶设计
振动料桶设计
分析回路
气缸从伸出到位的位置回缩,离开 1.9后,1.1中的 12口没有控制气体,但是 由于,双气控换向阀具有记忆功能,所以 气缸继续回缩;
回缩到1.7,继续气缸继续回缩
出动到1.2时,14口有气体,1.1换到左位
气缸伸出,在1.2-1.7之间往复运动
当延时阀延时一段时间t=10秒后,气缸停止运 动,最终停止在伸出到位的位置。
箱体夹紧机
热片焊接机
两个双作用气缸一起装在电加热 的闸板上,推压闸板将二块热塑板片 焊接在一起。板片的厚度范围是 1.5mm至4mm,接缝长度可以任意。 两气缸的活塞压力用压力调节阀限制 为p=400KPa=4bar。 按下间接启动按钮开关,两气缸在排 气节流下平行前向运功。为了便于调 节,在气缸和节流止回阀之间接了压 力表。气缸的两端位置都安有行程开 关,压下时间t=1.5s后,闸板返回初始 位置。用另一个按钮开关也可使气缸 立即回程。两缸动作顺序
三.常见的逻辑阀
1.单向控制阀(单向阀):自行车打气,气门心就是单向阀。 2.或阀(梭阀) (1) 工作原理 (2) 图形符号(中间称之为“死点”)
(3) 应用:逻辑回路和程序控制回路中被广泛应用。 3.与阀(双压阀) (1) 工作原理 (2) 图形符号
三.常见的逻辑阀
4.延时阀 (1) 作用:使阀芯换向延时
振动料桶设计
振动料桶设计
分析回路
气缸从伸出到位的位置回缩,离开 1.9后,1.1中的 12口没有控制气体,但是 由于,双气控换向阀具有记忆功能,所以 气缸继续回缩;
回缩到1.7,继续气缸继续回缩
出动到1.2时,14口有气体,1.1换到左位
气缸伸出,在1.2-1.7之间往复运动
当延时阀延时一段时间t=10秒后,气缸停止运 动,最终停止在伸出到位的位置。
箱体夹紧机
热片焊接机
两个双作用气缸一起装在电加热 的闸板上,推压闸板将二块热塑板片 焊接在一起。板片的厚度范围是 1.5mm至4mm,接缝长度可以任意。 两气缸的活塞压力用压力调节阀限制 为p=400KPa=4bar。 按下间接启动按钮开关,两气缸在排 气节流下平行前向运功。为了便于调 节,在气缸和节流止回阀之间接了压 力表。气缸的两端位置都安有行程开 关,压下时间t=1.5s后,闸板返回初始 位置。用另一个按钮开关也可使气缸 立即回程。两缸动作顺序
气动系统行程程序控制设计ppt课件

10
3.画主令信号线(X线) 用细实线画出主令信号线
起点与所控制的动作线起点相同,用符号“○”表示 信号线的终点和上一组中产生该信号的动作线终点相 同,用符号“╳”表示。
若终点和起点重合,用符号“ ”表示。
符号“ ”表示该信号的起点与终点重合, 称该信号 为脉冲信号,脉冲信号的宽度相当于行程阀发出信号、 气控阀换向、气缸启动和信号传递时间的总和。
完整版PPT课件
12
(四) 、气动回路原理图 自动程序需用一个启动阀、四个行程阀和两个双
输出记忆元件(两位四通阀)。一个与门可由元件串 联来实现,由此可绘出的气动回路图。
在具体画气动回路原理图时,特别要注意的是: 哪个行程阀为有源元件(即直接与气源相接),哪个 行程阀为无源元件(即不能与气源相接)。(其一般规 律是:无障碍的原始信号为有源元件)。
用粗实线画出各个气缸的动作区间,它以行列中大 写字母相同、下标也相同的列行交叉方格左端的格线 为起点,直画到字母但下标相反的方格。 3.画主令信号线(X线)
用细实线画出主令信号线,起点与所控制的动作线 起点相同,用符号“○”表示,终点在该信号同名动 作线的终点,用符号“╳”表示。若终点和起点重合, 用符号“ ”表示。
完整版PPT课件
17
X-D线完整图版PPT课件
18
(三)、分析并消除障碍信号 1.判别障碍信号 2.消除障碍信号
完整版PPT课件
19
1.判别障碍信号
所谓障碍信号是指在同一时刻,阀的两个控制侧同时存在控制信号, 妨碍阀按预定行程换向
用X—D图确定障碍信号的方法是:检查每组中是否存在有信号线比 其所控制的动作线长的情况,如存在这种情况,说明动作状态要 改变,而其控制信号不允许其改变(障碍动作状态的改变),这 种障碍其动作状态改变的信号就称之为障碍信号。信号线比其所 控制的动作线长的那部分线段叫障碍段,即图中用“﹏﹏﹏”表示 的线段。
气动行程程序控制系统图课件

听诊器法
通过听气动行程程序控制系统运行时的声音 ,判断是否存在异常。
触摸法
通过触摸气动行程程序控制系统的表面,判 断温度、振动等是否存在异常。
故障码法
通过读取气动行程程序控制系统的故障码, 快速定位除措施
气动执行器不动作
检查供气是否正常,气路是否畅通,气源压力是否达到要求。
03
气动行程程序控制系统的设计
气动行程程序控制系统的设计流程
确定控制方案
根据设计要求,确定控制系统 的整体架构和关键技术方案。
设计控制系统回路
根据控制方案,设计气动控制 回路,包括输入、输出和反馈 回路。
明确设计要求
明确控制系统的功能和性能要 求,了解控制系统的各种约束 条件。
选择合适的元件
选择合适的电磁阀、气缸、传 感器等气动元件,确保其性能 和质量满足控制系统要求。
气动执行器动作缓慢
检查气路是否被堵塞,气源压力是否正常,气缸是否有漏气现象。
气动执行器精度不高
检查气缸是否磨损严重,气缸内是否存在异物,位置传感器是否安装正确。
气动执行器运行不稳定
检查气源质量是否稳定,空气过滤器是否堵塞,管道是否存在振动现象。
气动行程程序控制系统故障预防措施
01
定期检查供气系统
定期检查供气系统是否正常,包括 供气管道、阀门、压力表等部件。
计数回路
对气动执行元件的动作次数进 行计数,实现特定的逻辑功能
。
气动行程程序控制系统的基本功能
位置控制
通过控制阀和气动执行元件实现机械机构的 位置精确控制。
速度控制
通过控制阀和气动执行元件实现机械机构的 速度平稳控制。
力控制
通过控制阀和气动执行元件实现机械机构的 力度稳定控制。