航空摄影测量与遥感复习重点
摄影测量与遥感(考试主要内容总结)——花了我好几天时间打的呢!!!
Px lx * 100 %
l:像幅边长
旁向重叠度
Py%=
Py ly * 100%
P:重叠影像边长
当投影射线会聚于一点时, 称为中心投影。 当诸投影射线都平行于某一固定方向时, 称为平行投影 (平 行投影分为斜投影和正射投影) 。 23 页作图题 摄影测量五个常用坐标系: 1 像平面坐标系 o-xy 像平面坐标系是影像平面内的直角坐标系,用以表示像点在像平面上的位置。若摄影中心为 s(如图 1) ,摄影方向与影像平面的交点 o 称为影像的像主点。像平面坐标系的原点就位于像主点。对于航空 影像, 两边对机械框标的连线为 x 和 y 轴的坐标系称为框标坐标系, 其与航线方向一致的连线为 x 轴, 航线方向为正向,像平面坐标系的方向与框标坐标系的方向相同。
,3个旋转量,,, 3个平移量X,Y,Z
绝对定向的解算实际上就是要确定空间相似变换的 7 个待定参数, 至少需要列出 7 个误差方程式。 在航空摄影测量中,这需要利用最少两个平面高程控制点和一个高程控制点。若有多余的控制点,便 可按最小二乘法原理来解算。 后方交会-前方交会解法:首先利用控制点的物方空间坐标与像坐标由单像空间后方交会求出左、右 影像的外方位元素,然后再根据待定同名点的像点坐标与外方位元素,利用空间前方交会方法求出待 定点的物方空间坐标。 相对定向-绝对定向解法:先通过解求立体像对的相对定向元素,按前方交会方法计算得到模型点的 空间辅助坐标以后,利用至少两个平面高程控制点和一个高程控制点进行单元模型的绝对定向,再由 绝对定向参数求得待定点的物方空间坐标。 根据平差中采用的数学模型可分为航带法、独立模型法和光束法。 根据平差范围的大小,解析空中三角测量可分为单模型法、单航带法和区域网法。 航带法空中三角测量: 1 基本思想:由于在单个模型连成航带模型的过程中,各单个模型中的偶然误差和残余的系统误差将 传递到下一个模型中去,这些误差传递积累的结果会使航带模型产生扭曲变形,所以航带模型经绝对 定向以后还需作模型的非线性改正,才能得到较为满意的结果,这便是航带法空中三角测量的基本思 想。 2 工作流程为: ①像点坐标的量测和系统误差改正;②像对的相对定向;③模型连接及航带网的构成;④航带模型的 绝对定向;⑤航带模型的非线性改正 航带法区域网平差基本思想:首先,按单航带法的方法将每条航带构成自由网,然后用本航带的控 制点及与上一条相邻航带的公共点,进行本航带的三维线性变换,把整个区域内的各条航带都纳入到 统一的摄影测量坐标系中,然后各航带按非线性变形改正公式同时解算各航带的非线性改正系数。 其计算过程为:1 建立自由比例尺的航带网 2 建立松散的区域网 3 区域网整体平差 独立模型法区域网空中三角测量的基本思想:把一个单元模型(可以由一个立体像对或两个立体像 对,甚至三个立体像对组成)视为刚体,利用各单元模型彼此间的公共点连成一个区域,在连接过程 中,每个单元模型只能作平移、缩放、旋转(因为它们是刚体) ,这样的要求只有通过单元模型的三 维线性变换(空间相似变换)来完成。在变换中要使模型间公共点的坐标尽可能一致,控制点的摄测 坐标应与其地面摄测坐标尽可能一致(即它们的差值尽可能小) ,同时观测值改正数的平方和为最小, 在满足这些条件的情况下,按最小二乘法原理求得待定点的地面摄测坐标。 第五章 数字影像与特征提取 1.对实际连续函数模型离散化的量测过程就是采样,被量测的点称为样点,样点之间的距离即采样间 隔。在影像数字化或直接数字化时,这些被量测的“点”也不可能是几何上的一个点,而是一个小的 区域,通常是矩形或圆形的微小影像块,即像素。
第二章--航空摄影测量的基本知识

第二章航空摄影测量的基本知识主要内容1.航摄仪和感光材料2.航摄基本知识与其作用比例尺重叠度〔航向旁向〕相片偏角3.投影比较:类型特点第一节航空摄影仪与感光材料一、航空摄影仪指航空摄影机、地面摄影测量用的摄影经纬仪,以与近景摄影测量用的摄影机,简称摄影机.主要由暗箱和镜箱构成.1.镜箱物镜物镜筒座架框标平面镜箱体是一个可调节摄影物镜与像平面之间距离的封闭筒2.暗箱:3.框标平面:镜箱体后端为一金属框架,研磨成极为精确的平面作用:像点坐标量测3.框标坐标:在框标平面内区其交点作为坐标原点,建立起框标直角坐标系.航摄软片紧密贴附在框标平面上,所以框标平面即为像平面的位置.4.像主点:摄影机主光轴与像平面的交点5.摄影机主距〔像片主距〕:摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距,一般用字母f表示.二、分类〔一〕按摄影物镜焦距和像场角分为:1.短焦距航摄仪,f<150 mm,相应的像场角为β>100º;2.中焦距航摄仪f:150 mm<<300 mm,像场角为70º<β<100º;3.长焦距航摄仪f>300 mm,相应的像场角为2≤70º.二、分类〔二〕按照像幅〔正方形〕大小分:1.短焦距航空摄影机的像幅多为18 cm×18 cm2.中焦距航空摄影机的像幅有18 cm×18 cm和23 cm×23 cm3.长焦距航空摄影机的像幅多为23 cm×23 cm和30 cm×30 cm第二节航空摄影测量对摄影资料的基本要求•测绘地形------摄影多采用竖直摄影方式,即航摄机在曝光瞬间物镜主光轴保持垂直于地面.•《航空摄影测量规X》要求像片倾角应小于2º~3º.竖直航空摄影:面积、带状和独立地块航空摄影三种.面积航空摄影:主要用于测绘地形图或进行大面积资源调查.带状航空摄影:主要用于公路、铁路、输电线路定线和江、河流域的规划与治理工程等.独立地块航空摄影:主要用于大型工程建设和矿山勘探部门,这种航空摄影只拍摄少数几X具有一定重叠度的像片.一、航空摄影测量对空中摄影的基本要求1.摄影比例尺:由摄影机主距和摄影高度之比摄影比例尺的变化要有一定的限制X围,按照摄影测量规X要求,像片比例尺分母的相对误差一般不超过5%2.摄影航高:指摄影飞机在摄影瞬间相对于某一所取基准面的高度基准面不同------相对航高和绝对航高绝对航高是指摄影物镜相对于大地水准面的高度,是指摄影物镜在摄影瞬间的真实海拔高度相对航高是指摄影机物镜相对于某一基准面的高度,通常称为摄影航高.它是相对于被摄区域内地面平均高程基准面的设计航高.相对航高是确定航摄飞机飞行的基本数据,摄影比例尺确定后,相对航高可按计算得到.摄影测量规X规定,同一航带内最大航高与最小航高之差不得大于30 m,摄影区域内实际航高与设计航高之差不得大于50 m.•3.航向重叠与摄影基线•航向重叠p%:相邻两X像片沿航线方向对所摄地面的重叠•作用:保证立体模型之间的连接•表示:以像幅边长的百分数表示摄影基线:两摄影站之间的距离相片基线b:S1与S2之间的距离地面基线B:B=b*m•像片的重叠是立体观察和像片连接所必需的条.4.旁向重叠与航线间距旁向重叠q%:面积摄影中两相邻航带像片之间重叠作用:相片连接中防止漏摄航线间距Dy:相邻航带间的距离•航向重叠p%:立体观测•旁向重叠q%:防止因地形起伏漏摄〔中心投影〕•在航向方向必须要使三X相邻像片有公共重叠影像,这一公共重叠部分称之为三度重叠部分5.像片旋偏角像片的旋偏角k:相邻两像片的主点连线与像幅沿航带飞行方向的两框标连线之间的夹角.原因:摄影时航摄机定向不准确影响:影响像片的重叠度,给航测内业作业增加困难.外方位元素规X:航摄规X规定要求像片的旋偏角小于6°,个别最大不应大于8°,而且不允许连续三X像片有超过6°的情况.第三节中心投影的基本知识1.投影类型:中心投影〔单中心多中心〕斜投影正摄投影2.航片------中心投影地形图----正摄投影地形图的数学特征:一是地形图上任意两点间的距离与相应地面点的水平距离之比为一常数,等于该地形图的比例尺;二是由地形图上任一点引出的两方向线间的夹角,等于地面上对应的水平角.航片——中心投影理想状况:p水平,地面水平,航片—正摄投影,可直接作为地形图使用〔缩放至某一比例尺〕实际:p倾斜,地面起伏航片:比例尺不唯一,方向夹角与地面夹角不等存在像点偏移航片不可直接作为地形图使用第四节航摄像片与地形图的区别一、投影不同产生的比例尺差异二、表示方法不同产生的图面内容差异。
摄影测量与遥感复习要点

摄影测量与遥感复习要点摄影测量是一种通过拍摄并测量影像来获取地理信息的方法。
遥感是一种通过从远距离获取数据来掌握目标特性的技术。
摄影测量和遥感在地理信息领域都起到重要作用,下面是它们的一些重要要点。
一、摄影测量的基本原理:1.空中三角测量:利用三角形的特性,通过影像上物点之间的距离关系来测量地面物点的位置。
2.法平面投影法:利用物点的前方交会和后方交会原理,测量物点的地面坐标。
3.焦距测定法:根据相机的参数和影像上的物点信息,计算相机的焦距。
4.高程测量方法:通过比例尺和重心高差原理,测量物点的高程信息。
5.数字像点平差:利用最小二乘法对像点观测结果进行调整,提高测量精度。
二、摄影测量的应用:1.地图制图:通过拍摄航空影像进行解译和处理,制作出地图产品。
2.土地利用规划:利用航空影像和卫星影像,进行土地利用的调查和规划。
3.海洋测绘:利用航空相机或卫星影像,进行海洋水质、岸线等测绘工作。
4.城市规划与管理:通过航空相机或卫星影像,监测城市的用地变化和发展趋势。
三、遥感的基本原理:1.电磁辐射与能谱:不同物质在特定波段上的辐射方式和特征。
2.电磁辐射的传播与遥感信息提取:利用物质对电磁波的能量吸收、反射和发射来获取目标特征。
3.传感器与平台:遥感传感器的类型和特征,及其在空间平台上的安装和使用。
4.影像处理与解译:对遥感影像进行预处理、增强,以及利用图像解译方法分析图像上的信息。
四、遥感的应用:1.环境监测:通过遥感技术对自然环境进行监测和评估。
2.农业资源调查:通过遥感影像对农田、植被等进行监测和调查。
3.气象预测:利用卫星遥感数据,对气象要素进行监测和预测。
4.土地利用与规划:通过遥感影像对土地利用状况进行调查和规划。
总结:摄影测量和遥感在地理信息领域都有着广泛的应用。
摄影测量主要通过拍摄影像和测量物点之间的关系来获取地理信息,主要用于地图制图和规划管理等;遥感则是通过从远距离获取数据来获得地面特征,主要用于环境监测和资源调查等。
北航考研摄影测量与遥感复习资料整理
一、填空题1、大气的散射作用有三种情况:瑞利散射、米氏散射、无选择性散射。
2、1978年以后,气象卫星进入了第三个发展阶段,主要以NOAA系列为代表。
我国的气象卫星发展较晚。
,风云一号气象卫星是中国于1988年9月7日发射的第一颗环境遥感卫星。
3、1999年,我国第一颗地球资源遥感卫星中巴地球资源卫星在太原卫星发射中心发射成功。
4、SPOT卫星较之陆地卫星,其最大优势是最高空间分辨率达到10米。
8、遥感技术在3S技术中的作用突出地表现在两个方面,即GIS数据库的数据源、利用遥感数字影像获取地面高程,更新GIS中高程数据。
二、名词解释1、遥感的定义广义的概念:无接触远距离探测(磁场、力场、机械波)狭义的概念:在遥感平台的支持下,不与目标地物相接触,利用传感器从远处将目标地物的地磁波信息记录下来,通过处理和分析,揭示出地物性质及其变化的综合性探测技术2、遥感器遥感器又称为传感器,是接收、记录目标电磁波特性的仪器。
常见的传感器有摄影机、扫描仪、雷达、辐射计、散射计等。
3、电磁波谱将电磁波在真空中传播的波长或频率、递增或递减依次排列为一个序谱,将此序谱称为电磁波谱。
次序为:γ射线—X射线—紫外线—可见光—红外线—微波—无线电波4、黑体指能够全部吸收而没有反射电磁波的理想物体5、大气散射辐射在传播过程中遇到小微粒(气体分子或悬浮微粒等)而使传播方向改变,并向各个方向散开,从而减弱了原方向的辐射强度、增加了其他方向的辐射强度的现象。
6、大气窗口电磁波通过大气层时较少被反射、吸收和散射的,透过率较高的波段。
7、地物波谱地物的电磁波响应特性随电磁波长改变而变化的规律,称为地表物体波谱,简称地物波谱。
地物波谱特性是电磁辐射与地物相互作用的一种表现。
、8、地物反射率地物的反射能量与入射总能量的比,即ρ=(Pρ/P0 )×100%。
表征物体对电磁波谱的反射能力。
9、地物反射波谱是研究可见光至近红外波段上地物反射率随波长的变化规律。
第十章 航空摄影测量及遥感成图简介

第十章航空摄影测量及遥感成图简介第一节航空摄影测量及遥感概述一、航空摄影测量的概念传统的摄影测量学是以摄影机所拍摄物体的像片为依据,确定所摄物的形状、大小、性质、和空间位置的方法,是测绘学科的一个很重要的分支。
由于摄影像片能够真实而详尽地记录摄影瞬间客观物体的形态,具体良好的量测精度和判读性能,所以其在地形测量、建筑工程及其他学科中已得到广泛应用。
摄影测量学可从不同角度进行分类,依据获得像片的不同方法和摄影距离的远近可分为:航天摄影测量、航空摄影测量、地面摄影测量、近景摄影测量与显微摄影测量。
按用途不同,可分为地形摄影测量和非地形摄影测量。
近景摄影测量主要用于测绘国家基本地形图,以及农、林等不猛的规划与资源调查用途和相应的数据库;非地形摄影测量的研究对象时一些科技中的专题科目,如建筑、生物、考古、医学、等。
按处理技术的不同,可分为模拟摄影测量、解析摄影测量和数字摄影测量。
模拟摄影测量是利用光学和机械仪器模拟摄影过程,建立缩小了的几何模型,通过量测该模型,获得所需的图件。
解析摄影测量是指利用计算机。
根据物点与像点的几何关系式,通过解析计算的方法,确定物点坐标,并储存于计算机中,再通过数控绘图桌绘出图形来。
数字摄影测量是利用计算机技术对数字影像进行处理,获得各种形式的数字化产品。
模拟摄影测量、解析摄影测量和数字摄影测量是摄影测量学发展的三个阶段,数字摄影测量是摄影测量学的发展方向。
航空摄影测量是指从航摄飞机上对地面进行摄影,根据所获得的航摄像片,测绘摄区地形图的工作。
航空摄影测量具有摄影测量所包含的所有优点,主要是:在像片上进行量测和判读,无需接触物体本身,很少受自然和地理条件的限制。
影像客观真实地反映着目标,信息丰富逼真,可以直接从中回去大量的几何和物理信息,使测量工作者可以将大量的野外工作转到室内来进行,同事由于在量测的过程中广发地采用了机械化和自动化方法,所以能缩短工期,提高成图效率。
目前航空摄影测量已是测绘地形图最主要、最有效的方法,同时还被广泛的应用于军事、地质、水文、森林、道路、水利水电、城建规划、等各部门的勘测工作。
执业资格培训包 测绘航空摄影重难点分析指南

测绘综合能力—测绘航空摄影重难点分析指南一、考试大纲分析1.按照测绘航空摄影技术设计的内容、方法和要求,选择航摄季节和航摄时间,确定飞行平台、航摄仪和航摄比例尺,划定航摄分区,计算航摄参数。
2.根据项目要求,确定在航空摄影中采用机载激光扫描、机载侧视雷达、低空遥感系统以及定位定姿系统等技术的实施方案。
3.掌握航摄影像资料质量检查的方法和技术指标,并根据测绘航空摄影项目的特点和要求,进行航摄中问过程的质量控制和项目成果的整理、检查、验收和归档。
二、复习重点提示根据大纲要求,测绘航空摄影的知识点有测绘航空摄影概要、测绘航空摄影技术设计、测绘航空摄影工作的实施、航空摄影中的新技术应用和航摄成果的检查验收等几方面,其中航摄仪及其检定、测绘航空摄影基本要求、测绘航空摄影技术设计、新技术应用航空摄影中的新技术应用和航摄成果的检查验收在历年考试中都出现过,而测绘航空摄影基本要求、技术设计中的技术要求、航摄因子计算、成果检查内容和提交成果清单是考查的重点内容,要特别关注。
在标准规范方面,要重点阅读GB/T 1 9294-2003《航空摄影技术设计规范》、GB/T6962-2005《1:500 1:1000 1:2 000地形图航空摄影规范》、GB/T 27919-2011《IMU/GPS辅助航空摄影技术规范》、CH/Z 3005-2010《低空数字航空摄影规范》、CH/Z 3001-2010《无人机航摄安全作业基本要求》等标准规范,并对规范中涉及的技术要求、主要技术指标、工作(或技术)流程与方法、质量控制内容与方法、提交成果清单等内容重点掌握。
同时,了解GB/T 16176-l996《航空摄影产品的注记与包装》、GB/T 15661-2008《l:5000 l:10000 1:25000 1:50000 1:100000地形图航空摄影规范》、CH/T 8024- 2011《机载激光雷达数据获取技术规范》、OB/T 27920.1-2011《数字航空摄影规范第l部分:框幅式数字航空摄影》、GB/T 27920.2-2012,《数字航空摄影规范第2部分:推扫式数字航空摄影》、CH/T 8021-2010《数字航摄仪检定规程》等相关标准规范的主要内容、技术要求以及技术指标。
航测遥感知识点
航测遥感知识点航测遥感是一种通过航空器或航天器获取地球表面信息的技术。
它结合了航空摄影、遥感技术和地理信息系统,广泛应用于测绘、城市规划、农业、环境监测等领域。
本文将从航测遥感的基本原理、数据获取、数据处理和应用等方面介绍相关知识点。
1. 航测遥感的基本原理航测遥感的基本原理是利用航空器或航天器搭载的传感器获取地球表面的电磁辐射信息,通过对辐射数据进行处理和分析,提取出地物的特征和信息。
航测遥感的基本原理包括光学遥感和微波遥感两种。
光学遥感是利用可见光、红外线和微波等光谱段的电磁波进行地物信息的获取。
不同的波段可以反映地物的不同特征,如可见光波段可以反映地物的形状、红外线波段可以反映地物的温度和植被状况等。
微波遥感是利用微波信号与地物之间的相互作用来获取地物信息。
微波具有穿透云雾和植被的能力,可以用于获取地表的地形、土壤湿度、海洋表面风场等信息。
2. 航测遥感数据的获取航测遥感数据的获取主要通过航空摄影和遥感卫星两种方式进行。
航空摄影是指利用航空器搭载的相机进行地表影像的获取。
相机通常包括正射相机和斜摄相机两种类型。
正射相机可以垂直拍摄地表影像,得到的影像具有较高的几何精度;斜摄相机可以以一定角度斜向拍摄地表影像,得到的影像可以展现地物的三维形态。
遥感卫星是指搭载在航天器上的遥感传感器获取地表影像。
遥感卫星的数据可以实现全球范围的覆盖,并具有周期性观测的能力。
常见的遥感卫星有Landsat、SPOT和MODIS等。
3. 航测遥感数据的处理航测遥感数据的处理包括数据预处理、数据解译和数据分析等步骤。
数据预处理是指对获取的原始数据进行几何校正、辐射校正和大气校正等处理,以提高数据的准确性和一致性。
数据解译是指通过人工或自动化的方式对遥感影像进行地物分类和提取。
常用的方法有像元分割、特征提取和分类算法等。
数据分析是指对处理后的遥感数据进行统计、模型建立和空间分析等操作,以获取所需的地理信息。
4. 航测遥感的应用航测遥感在测绘、城市规划、农业、环境监测等领域有着广泛的应用。
摄影测量学复习资料整理
一、名词解释1像片比例尺:航摄像片上一线段为l的影像与地面上相应线段的水平距离L之比。
2绝对航高:是相对干平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
3相对航高:是指摄影机物镜相对于某一基准面的高度,常称为摄影航高。
是确定航摄飞机飞行的基本数据,按H=mf计算得到。
4中心投影:投影光线会聚于一点的投影称为中心投影。
5平行投影:投影光线相互平行的投影为平行投影。
6像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜即像片有倾斜,地面有起伏时,便会导致地面点在航摄像片上构像相对于在理想情况下的构像,产生了位置的差异,这一差异称为像点位移。
7摄影基线:航线方向相邻两个摄影站点间的空间距离。
8航向重叠:同一条航线上相邻两张像片的重叠度。
9旁向重叠:相邻航线相邻两像片的重叠度。
10像片倾角:摄影瞬间摄影机的主光轴近似与地面垂直,偏离铅垂线的夹角小于2度~3度,夹角为像片倾角。
11像片的方位元素:确定摄影瞬间摄影物镜(摄影中心)与像片在地面设定的空间坐标系中的位置与姿态的参数,即确定这三者之间相关位置的参数。
12像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y0。
13像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。
14相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。
即确定一个立体像对两像片的相对位置。
15绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数。
16单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线条件方程,反求该像片的外方位元素。
17空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会。
18双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算方式,通过计算机解求被摄物体的三维空间坐标的方法,称为双像解析摄影测量。
摄影测量与遥感考试要点
第一章绪论1、传统摄影测量学:利用光学摄影机摄影的像片,研究和确定被摄物体的大小、形状、位置、性质和相互关系的一门科学和技术。
2、摄影测量学,其含义是基于像片的量测。
3、摄影测量与遥感的主要特点是在像片上进行量测与解译,无需接触被测物体本身,因而很少受自然和地理条件的限制,而且可获得摄影瞬间的动态物体影像。
4、摄影测量与遥感的分类:(1)按距离远近:航空摄影测量与遥感;航天摄影测量与遥感;地面摄影测量与遥感;近景摄影测量与遥感和显微摄影测量与遥感(2)按用途分:地形摄影测量与遥感和非地形摄影测量与遥感(3)仅就摄影测量而言,按技术处理手段:模拟摄影测量、解析摄影测量和数字摄影测量(三个发展阶段)5、影像信息科学:是一门记录、存储、传输、量测、处理、解译、分析和显示由非接触传感器影像获得的目标及其环境信息的科学、技术和经济实体。
第二章单张航摄像片解析1、摄影是按小孔成像原理进行的。
航空摄影机物镜中心至底片面的距离是固定值,称为航摄机主距,常用f表示。
主距之所以是固定值是因为航高相对于摄影机主距很大,它近似于无穷远成像,所以主距约等于摄影机物镜的焦距。
2、航摄机向地面摄影时,摄影物镜的主光轴偏离铅垂线SN的夹角a,称为航摄像片倾角。
3、当像片水平,地面水平时,从相似三角理论可知,此时,航摄比例尺为像片上一段距离l和地面上相应距离L之比,即1/m=l/L=f/H,式中,f为摄影机主距,H为相对于平均高程面的航摄高度,称为航高。
当像片有倾斜或地面有起伏时,近似计算摄影比例尺的公式为:1/m约=f/H。
摄影比例尺越大,像片地面分辨率越高,有利于影像的解译和提高成图的精度。
4、同一条航线内相邻像片之间的影像重叠称为航向重叠,一般要求在60%以上。
相邻航线的重叠称为旁向重叠,重叠度要求在24%以上。
5、把一条航线的航摄像片根据地物景象叠拼起来,每张像片的主点连线不在一条直线上,而是成为弯弯曲曲的折线,称为航线弯曲。
摄影测量与遥感复习要点
1 相对定向:恢复两张像片的相对位置,建立立体模型;2 绝对定向:将立体模型纳入到地面测量坐标系中,并规化为所需的模型比例尺3 立体像对:在立体摄影测量中由不同摄影站对同一地面景物摄取的,具有一定影像重叠的两张像片称为立体像对;4 像片纠正:将中心投影的构像经过投影变换转变为正射投影,同时消除像片倾斜所引起的像点位移,使其相当于水平像片的构想,符合规定的比例尺,此变换过程为像片纠正;5 解析空三:只测定少量必需的外业控制点,在室内测出一批测图所需要的像片点坐标,通过解析的方法一定的数学模型平差计算出相应地面点的地面坐标;6 核线相关:核面与两像片的交线为同名核线,同名像点必定在同名核线上,沿核线相关计算,寻找同名像点;7 数字高程模型:是国家基础空间数据的重要组成部分,表示地表区域上地形的三维向量的有限序列,即地表单元高程的集合Z=fx,y研究地表起伏;8 GPS辅助空三:利用GPS动态定位原理,采用机械GPS接收机与地面基准站的GPS接收机同时,快速;连续地记录相同的GPS信号,通过相对定位技术的离线数据处理后,获得航摄飞行中摄站点相对与该地面基准点的三维坐标,并将作为辅助数据应用于光束法区域平差中;9 内方位元素:确定摄影中心与像片间相关位置的参数为内方位元素;10外方位元素:确定摄影中心和像片在地面坐标系中的位置与姿态的参数为外方位元素;11 像片调绘:利用航摄像片所提供的影像特征,对照实地进行识别,调查和做必要的注记,并按照规定的取舍原则,图示符号表示在航片上的工作;12 4D产品:DEM数字高程模型DOM数字正摄影像DRG数字栅格地图DLG 数字线划地图1航空摄影测量的定义与任务:定义:利用飞机或其他飞行器所载的摄影机在空中拍摄地面像片;结合地面控制点测量,调绘和立体测绘等步骤,绘制出地形图的作业;任务:测制各种比例尺地形图和影像地图,建立地形数据库,并为各种地理信息系统和土地信息系统提供基础依据;2 航空摄影特殊点,线,面:点:摄影中心S,像主点O,地底点N,等角点C主合点i线:摄影机轴SO,垂线SN,主纵线W,主横线h o h o等比线h c h c摄影方向线vv,透视轴TT,合线h i h i面:像平面P,地平面E,主垂面W,合面E s;3航空摄影测量有哪些常用的坐标系各怎样定义的1像方坐标系像平面坐标系:用于表示像点在像平面上的位置,以像主点为原点的像平面坐标系用0-XY表示;2像框标坐标系:使用航摄像片的框标来定义像平面坐标系3像空间坐标系:为便于进行像点的空间坐标转换建立的能够描述像点空间位置的坐标系;4向空间辅助坐标系:将不统一的像空间坐标系转化到一种相对统一的坐标系中从而方便计算,该坐标系的坐标原点扔为摄影中心S,UW坐标轴方向视情况而定; (2)物方坐标系:1 摄影测量坐标系:将第一个像对的像空间辅助坐标系S-UVW沿W轴反方向平移到地面点P得到的坐标系P-XpYpZp2地面测量坐标系:用国家测图所采用的高斯-克吕格3度或6度带投影的平面直角坐标系和以某平面为起算面的高程系所组成的空间左手坐标系T-XtYtZt3地面摄影测量坐标系:为方便摄影测量坐标系和地面测量坐标系的转换而建立的过渡性坐标系;坐标原点在测区内的某一地面点,X轴为大致与航向一致的水平方向,Z轴沿铅垂方向,构成右手系;4 简述空间后方交会的解析过程1获取已知数据2量测控制点的像点坐标3确定未知数的初始值4计算旋转矩阵R5逐点计算像点坐标的近似值6组成误差方程式7组成法方程式8求解外方位元素9检查计算是否收敛5 述解析空三的作业过程1原始资料处理2自动空中三角测量准备3加密点自动生成4交互式编辑5接边及成果输出6 简述双向解析的相对定向—绝对定向方法的基本过程1用连续像对或单独像对的相对定向元素的误差方程式解求像对的相对定向元素;2由相对定向元素组成左右像片旋转矩阵R1 R2并利用前方交会式求出模型点在像空间辅助坐标系中的坐标3根据已知地面控制点坐标按绝对定向元素的误差方程式求解该立体模型的绝对定向元素4按绝对定向公式将所有待定点的坐标纳入地面摄影测量坐标中;7连续像对与独立像对各取什么样的空间坐标系各有哪些相对元素单独相对相对定向:像空间辅助坐标系V轴,摄影基线,V轴垂直于左主核面,W轴;位于左主核面;相对元素:φ 1 k1 φ 2 w2k2连续:以左片像空间坐标系作为本像对的像空间辅助坐标系,相对定向元素:b vb w φ2w2 k28 航空像片与地形图区别是1表示方法地形图是按成图比例尺所规定的各种符号,注记和等高线来表示地物地貌,航摄像片影像的大小,形状,色调;2表示内容:地形图用相应符号,文字,数字注记表示,房屋,道路等,这些在像片上是表示不出来的,且地形图上必须经过综合取舍,只表示经选择的有意义的地物,像片上有所摄地物的全部影像,显示内容广泛,3投影方式不同:地形图是正射投影,比例尺出处一致,地形图上图形不仅与实际形状完全相似,而且某相关方位保持不变;航片是中心投影,由于像片倾斜,地形起伏误差影响,使航片上影像有变化,各处比例尺不一致相关方位也发生变化;9解析空中三角测量有哪几种常用的方法基本思想是什么1航带法解析空中三角测量;以单元航带模型作为一个基本单元,利用地面控制点的摄影测量坐标与实际地面坐标相等以及相邻航带公共点坐标应相等为条件,用平差差在全区域求各加密点坐标,平差模型; 2独立模型法:以构成的每一单元模型为独立单元,进行全区域的整体平差计算,通过平移,缩放,旋转最终达到最或是位置; 3光束法解析空中三角测量;以每张像片所组成一束光线为平差的基本单元,在全区域内建立误差方程式,求每张像片的六个外方位元素和加密点的地面坐标;平差基础方程为:共线条件方程10 像片控制点布设的基本原则1像控点的布设必须满足布点方案的要求,一般情况下按图幅布设,也可以按航线或采用区域网布设;2位于不同成图方法的图幅之间的控制点或位于不同航线,不同航区分界处的像片控制点,应分别满足不同成图方法的图幅或不同航线和航区各自测图的要求,否则应分别布点;3在野外选择像片控制点,不论是平面点,高程点或平高点,都应该选在明显目标点上; 4当图幅内地形复杂,需采用不同成图方法布点时,一幅图内不超过两种布点方案,每种布点方案所包括的像对范围相对集中,可能时应尽量按航线布点,以便于航测内业作业;5像控点的布设,应尽量使内业作业所用的平面点和高程点合二为一,即布设成平高点;11 航摄像片的判读特征有哪些1形状特征 2大小特征 3色调特征 4阴影特征 5相关位置特征 6纹理特征 7图案结构特征 8色彩特征 9活动特征 12 简述DEM 数据处理的流程.1数据格式转换 2 坐标系统变换 3 数据编辑4 栅格数据矢量化 5 数据分块 6 子区边界的提取13 数字正摄影像图制作方法:1 全数字摄影测量方法:就是利用计算机对数字影像进行处理,并用计算机视觉,影像匹配和影像识别代替人眼,与计算机进行立体测量2单片数字微分纠正方法:首先,对航摄负片进行影像扫描,然后根据区域内已有的数字高程模型的数据和控制点坐标对数字影像内定向,数字微分纠正3正摄影图扫描方法:可直接对已有的光学制作的正射影像图进行影像扫描数字化,再经过平移缩放旋转和仿射等图像变换就能获得正确的数字正射影像图; 1共线方程各参数含义和用途)()()()()()()()()()()()(333222333111S A S A S A S A S A S A S A S A S A S A S A S A Z Z c Y Y b X X a Z Z c Y Y b X X a f y Z Z c Y Y b X X a Z Z c Y Y b X X a fx -+-+--+-+--=-+-+--+-+--=x,y→ 想点坐标观测值; XYZ→ 相应地面点坐标控制点已知X s,Y s,Z s → 摄影中心在选取的地面摄影测量坐标一般未知待求a1...c3→ 由三个外方位元素00.0..0.0确定一般未知待求作用:由控制点解算外方位元素-单像空间后方交会,光束法由立体像对的像点坐标解算对应地面点坐标-多像前方交会利用DEM 制作数字正射影像图;利用DEM 进行单张像片测图;2摄影测量基本思想利用拍摄手段把物体摄成影像以获取物体各方面信息 原始资料 投影方式 仪器 操作方式 产品模拟摄影测量 像片 物理 模拟测图仪 作业人员 模拟产品 解析摄影测量 像片 数字 解析测图仪 机助作业员操作 模拟 数字数字摄影测量 像片 数字 计算机 自动化操作+作业员干预 模拟 数字3 grid 与tin 的优缺点优点:1只存储了高程坐标,2数据结果简单,3易于管理缺点:1 有时不能准确表示地表物结构与细部特征;2格网过大会损失地形的关键特征;3格网太小地形简单地区又存放在大量冗余数据4格网点高程内插时损失精度5如不改变格网大小,则无法适用起伏程度不同的地区;6对于某些特殊计算如视线计算时,格网的轴线方向被夸大7由于栅格过于粗略,不能精确表示地形的关键特征,如山,峰等;TIN 优点:1 能充分利用地貌的特征点,线,面;较好地表示复杂地形;2 可根据不同地形,选取合适的采样点数;3 分析地形和绘制立体图方便,4 克服了高程矩阵中冗余数据的问题,缺点: 存储量大,数据结构复杂,不便于规范管理,难以与矢量和栅格数据进行联合分析4航空摄影作业过程主要步骤和内容1航空摄影2 航测外业3航测内业4测绘产品1.航空摄影:在专用飞机上安装航空摄影机,通过对地面的连续摄影,以获取所摄地区的原始航摄资料和信息,主要为航摄提供基本的测图资料及一些影像数据;2.航测外业:像片控制测量;像片调绘;像片图测图;2.1像片控制测量:技术计划的拟定,高级地形控制点观测与计算;控制点的迭制;像片控制点的观测,计算,控制测量成果的整理;2.2像片调绘:调绘前准备工作;像片判读;地物地貌元素的综合取舍‘调查有关情况和测量有关数据;补测新增地物;像片着墨清绘;接边;检查验收;2.3像片图测图:固定比例尺像片图测图是综合法测图的主要方法,以航摄像片为基础,经像片纠正制作或具有与测图比例尺相等的像片平面图,根据像片图的影像确定地物,地貌点的平面位置,利用像片平面图在野外,通过普通地形测量方法确定地面高程,测绘等高线,调绘地物地貌,最终获得地形图;3 航测内业:控制点加密,像片纠正,立体测图像片加密:满足内业测图或制作像平面图的需要;像片纠正:消除航摄片与正射片间差异,满族像片图及制作正射图的需要;立体测图:航测成图的主要方法;4 测绘产品:4D产品,立体景观图,立体透视图,各种工程设计所需要的三维信息5通过本课学习,你认为要干好摄影测量工作要哪些方面的素质摄影测量时信息摄取,处理,提取和成果表达的一门信息学科,主要任务是测制各种不同比例尺地形图,建立地形数据库,并为各种地理信息系统和土地信息系统提供基础数据;摄影测量学与工程测量学,测绘学及其他学科间有密切的关系,摄影测量学必须具备大地测量学,工程测量学,地图制图学,遥感,地理信息系统,GPS及地籍测量与土地管理方面知识;误差理论测量平差,整理统计是处理摄影像片的基础,除此之外,还应掌握数学,应用学,物理学,工程科学,计算机科学,人文管理学等方面知识;为了加强交流,需熟练掌握英语,掌握专业知识后;还应培养我们的个人情操,在工作中认真严谨,态度端正,多动手实践,有吃苦精神不怕苦不怕累,只有具备以上素质,才能学好这门学科,才能为摄影测量做贡献;第一章绪论1.摄影测量的三个阶段:模拟、解析、数字;2.摄影测量的主要特点:①无需接触被摄物体本事获得其信息;②有二维影像重建三维目标;③面采集数据形式;④同时提取物体的几何与物理特征;3.摄影测量按用途可分为:地形和非地形测量;4.传统的摄影测量与数字摄影测量的区别:传统的摄影测量是利用光学摄影机提取像片,通过像片来研究和确定被摄物体的形状、大小、位置和相互关系的一门科学技术;数字摄影测量是利用所采集的数字化影像,在计算机上进行各种数值、图形和影像处理,研究目标的几何和物理特性,从而获得各种形式的数字产品和可视化产品;第二章影像获取1.框标的作用:建立像片的直角框标坐标系;2.摄影机主距f:航空摄影机物镜中心至底片面的距离是固定值,称为摄影机主距;它与物镜焦距基本一致,因物镜畸变等因素而有少许差异;3.常用的遥感数据有:美国陆地卫星LandsatTM和MSS遥感数据,法国SPOT卫星遥感数据;4.量测型相机与非量测型相机的区别:是否有框标;第三章摄影测量基础知识1.绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面的航高;2.相对航高:摄影瞬间摄影机物镜中心相对于其他某一基准面或某一点的高度;3.影像方位元素:方位元素:确定摄影时摄影物镜摄影中心S 、像片与地面三者之间相关位置的参数;即摄影瞬间摄影中心S 、像片在地面设定的空间坐标系中的位置与姿态;①内方位元素:摄影物镜中心S 相对于影像位置关系的参数x 0 ,y 0 f ;②外方位元素:确定影像或摄影光束在摄影瞬间的空间位置和姿态的参数Xs, Ys, Zs,φ,ω,κ ;获取方法:①单像空间后方交会求解;②GPS 测定一台,Xs,Ys, Zs,三台φ,ω,κ ;③POS 系统测定,GPS+惯导系统;4.R 阵为旋转矩阵,正交矩阵;5.中心投影构象方程式及其应用:)()()()()()()()()()()()(333222333111s s s s s s s s s s s s Z Z c Y Y b X X a Z Z c Y Y b X X a f y Z Z c Y Y b X X a Z Z c Y Y b X X a fx -+-+--+-+--=-+-+--+-+--= 应用:①单像空间后方交会和多像空间前方交会;②解析空中三角测量光束法平差中的基本数学模型;③摄影测量中的数字投影基础;④航空影像模拟已知影像内外方位元素和物点坐标求像点坐标; ⑤利用DEM 与共线方程制作数字正射影像图;⑥利用DEM 与共线方程进行单幅影像测图;6摄影测量常用坐标系:①像平面直角坐标系o – x y该坐标系原点:像主点O 即摄影中心S 在像平面上的垂足像平面坐标系的坐标轴方向与框标坐标系相同;是右手坐标系; ②像空间直角坐标系S-xyz为了进行像点的空间坐标变换,而建立的描述像点在像空间位置的坐标系;每张像片的像空间坐标系是各自独立的;③像空间辅助坐标系S-uvw由于各张像片的像空间坐标系不统一,给计算带来了困难,为此,需要建立一种相对统一的坐标系,称为像空间辅助坐标系;将像空间坐标系的Z 轴方向转到铅垂方向或某一竖直方向;④地面摄影测量坐标系D-XpYpZp由于像空间坐标系是右手系,地面测量坐标系是左手系,给地面点由像空间辅助坐标系转换到地面测量坐标系带来了困难,为此,需要在两种坐标系之间建立一个过渡性的坐标系,称为地面摄影测量坐标系;坐标原点D 为测区内的某一地面点;⑤地面测量坐标系T-XtYtZt地面测量坐标为国家统一坐标系,平面坐标系为高斯-克吕格三度带或六度带1980西安坐标系,高程坐标系为1985黄海高程系;第四章双像立体测图基础与立体测图1.双像立体测图:双像立体测图是指利用一个立体像对即在两个位置对同一景物摄取有一定影像重叠的两张像片重建地面立体几何模型,并对立体几何模型进行量测,直接给出符合规定比例尺的地形图,获取地理基础信息;使用一个立体像对构建地面立体模型的方法也称为立体摄影测量;2.人造立体观察的条件:①立体像对:两张像片必须是在两个不同位置对同一景物摄取的立体像对;②分像条件:每只眼睛必须只能观察像对的一张像片;③两像片上相同景物同名像点的连线与眼基线应大致平行;④两像片的比例尺应相近差别<15%;3.主核面:是指同多像主点的核面;4.左右视差P:同名投影点在仪器X方向上的偏差称为左右视差;5.上下视差Q:同名投影点在仪器Y方向上的偏差称为上下视差;6.完成相对定向的唯一标准:两像片上同名投影光线对对相交;7.内定向:恢复像片对的内方位元素;8.相对定向:确定一个立体像对两像片的像对位置;相对定向元素:确定两像片相对位置关系的元素;9.绝对定向:是借助已知的控制点对几何模型进行平移、旋转与缩放,使其成为地面模型,纳入到地面摄影测量坐标系中D-XYZ;10.绝对定向公式:第五章摄影测量解析基础1.单像空间后方交会:利用影像覆盖范围内一定数量的地面控制点的空间坐标和相应的影像坐标,根据共线条件方程反求出影像的外方位元素;这种方法称为单幅影像的空间后方交会;目的:获取外方位元素;基本思想:以单幅影像为基础,从该影像所覆盖地面范围内若干地面控制点的已知坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时的外方位元素Xs, Ys, Zs,φ,ω,κ;2.空间后方交会法的详细过程:①获取已知数据 m, x , y , f , Xt, Yt, Zt;②量测控制点像点坐标 x,y;③确定未知数初值 Xs, Ys, Zs, , , ;④计算旋转矩阵R;按3-9式;⑤逐点计算像点坐标的近似值x、y;按5-1式;⑥逐点计算误差方程式5-3式的系数和常数项,组成误差方程式;系数计算按5-4式5-8式和5-9b式;⑦计算法方程的系数矩阵ATA与常数项ATL,组成法方程ATAX= ATL;⑧解求外方位元素;按5-6式 X=ATA-1 ATL,并与相应的近似值求和,得到外方位元素新的近似值;⑨检查迭代计算是否收敛;3.解析法绝对定向:解析法绝对定向,就是利用已知的地面控制点,从绝对定向的关系式出发,解求七个绝对定向元素;目的:将相对定向后求出的模型点在像空间辅助坐标系中的坐标变换为地面摄影测量坐标;4.立体像对双像前方交会:由立体像对中两张像片的内、外方位元素和同名像点的影像坐标量测值来确定该点在物方空间坐标系中坐标的方法;5.什么叫单像空间后方交会其观测值和未知数各是什么至少需要几个已知控制点,为什么答:根据共线方程利用一直控制点与其影像对应点,反求该像片的外方位元素Xs,Ys,Zs, Ψ,ω,k的方法称为单像空间后方位交会;观测值为:从摄影资料查找像片的比例1/m,平均航高,内方位元素x0,y0,f;从外业测量成果中,获取控制点的地面测量坐标,Xt,Yt,Zt;并转换为地面摄影测量坐标X,Y,Z;6.双像解析摄影测量有哪三种解析方法各有什么特点后交---前交解法,该方法前交的结果依赖于空间后方交会的精度,前交过程中没有充分利用多余条件平差计算;常在已知像片的外方元素,需确定少量待定坐标时采用;相对定向---绝对定向解法,该方法计算公式比较多,最后的点位精度取决于相对定向和绝对定向的精度,用这种方法的结果不能严格表述一副影像的外方元素,多在航带法解析空三测量中用;光束法,该方法理论严密,要求精度最高,带顶点坐标是按最小二乘准则解的,在光束法解析空三测量中用;第六章解析空中三角测量一、解析空中三角测量:采用严密的数学公式,按最小二乘法原理,用计算机进行的空中三角测量;二、解析空三的平差模型:1.航带法区域网平差;2.独立模型法区域平差;3.光束法区域网平差;三、航带网法空中三角测量基本思想:把许多立体像对构成的单个模型连结成一个航带模型,将航带模型视为单元模型进行解析处理,通过消除航带模型中累积的系统误差,将航带模型整体纳入到测图坐标系中,从而确定加密点的地面坐标四、独立模型法区域网空中三角测量基本思想:独立模型法区域网空中三角测量的基本思想是:把一个单元模型视为刚体,利用各单元模型彼此间的公共点连成一个区域,在连接过程中,每个单元模型只能作平移、缩放、旋转因为它们是刚体即单元内不加任何改正的独立模型,这样的要求只有通过单元模型的空间相似变换来完成;在变换中要使模型间公共点的坐标尽可能一致,控制点的摄测坐标应与其地面摄测坐标尽可能一致,同时误差的平方和为最小,在满足这些条件下,根据最小二乘准则对全区域网实施整体平差,解求每个模型的七个绝对定向参数,从而求出所有待定点的地面坐标;五、光束法空中三角测量的基本思想:以一张像片组成的一束光线作为一个平差单元,以中心投影的共线方程作为平差的基础方程,通过各光线束在空间的旋转和平移,使模型之间的公共光线实现最佳交会,将整体区域最佳地纳入到控制点坐标系中,从而确定加密点的地面坐标及像片的外方位元素;六、GPS辅助空中三角测量:GPS辅助三角测量就是利用机载GPS接收机与地面基准站的GPS接收机同时、快速、连续的记录相同的GPS卫星信号,通过相对定位技术的离线数据处理后获得航摄飞行中摄站点相对于该地面基准点的三维坐标,将其作为区域网平差中的辅助数据用于区域网联合平差,从而可大量节省甚至省去地面控制点;第七章数字地面模型及其应用数字地面模型就是一个用于表示地面特征的空间分布的数据阵列;最常用的是用一系列地面店的平面坐标X、Y及该点的地面高程Z或属性组成的数据阵列;二、数字高程模型:数字高程模型DEM或 DHM是表示区域D上地形的三维向量有限序列{Vi=Xi,Yi,Zi,i=1,2,…n}其中Xi,Yi∈D是平面坐标,Zi是Xi,Yi对应的高程;三、数字高程模型数据内插方法:DEM的数据内插就是根据参考点已知点上的高程求出其他待定点上的高程;1.移动曲面拟合法;2.线性内插;3.双线性多项式内插法;第八章全数字摄影测量基础。
航空摄影测量知识点
4D产品、航空摄影测量知识点航摄准备:摄区基本情况分析、确定航摄设计用图、航摄空域申请、《航空摄影技术设计书》航摄设计:摄影比例尺的确定、航摄分区的划分(a)分区界线应与图廓线相一致; b)分区内的地形高差不得大于四分之一航高(以分区的平均高度平面为基准面的航高)。
c)在地形高差许可且能够确保航线的直线性的情况下,航摄分区的跨度应尽量划大,同时分区划分还应考虑用户提出的加密方法和布点方案的要求;e)当地面高差突变,地形特征差别显著或有特殊要求时,可以破图幅划分航摄分区。
)、基准面高度的确定、航线的敷设、航摄基本参数的计算、航摄季节和时间的选择、航摄仪的选择与检定、航摄胶片的选择与测定;空中摄影:设备的检测发、航摄试片、航空摄影、填写飞行日志;摄影处理:配置冲洗药液、胶片冲洗、像片印制;质量检查:像片重叠度、像片倾斜角、像片旋偏角、航线弯曲度、摄站航高差、航摄漏洞、航线偏差、影像质量;成果提交:1)航摄分区略图2)航片索引图3)航摄底片、像片4)航摄仪检定表5)航摄底片压平质量检测数据表6)航摄底片密度抽样测定数据表7)航摄飞行报告8)附属仪器记录数据9)成果质量检查报告10)技术总结11)航摄资料移交书12)合同规定的其他资料摄影测量的主要任务之一:把地面按中心投影规律获取的摄影比例尺航摄像片转换成以测图比例尺表示的正射投影地形图解析空中三角测量案例空中三角测量的精度指标主要指定向误差和控制点残差:框标坐标残差绝对值一般不大于0.010mm,最大不超过0.015mm。
扫描数字化航摄影像连接点上下视差中误差为0.01mm(1/2像素),数码航摄仪获取的影像连接点上下视差中误差为1/3像素。
1、资料准备:像片索引图、数字/数字化航摄影像、航摄仪检定书、飞行记录资料、区内现有小比例尺地形图、区域网像控点刺点片、区域网像控点联测成果。
2、像控点的转刺:航摄像片上平面点和平高点的刺孔偏离误差,不得大于像片上的 0.1毫米,高程点如选在明显目标点上,则要求相同,像控点的刺孔要小,刺孔直径最大不得超过0. 2毫米3、像控点的选点观测:像片控制点的一般应满足下列条件:a)像片控制点的目标影像应清晰,易于判读;目标条件与其他像片条件矛盾时应着重考虑目标条件;b)布设的控制点应能公用;c)控制点距像片边缘不应小于1cm (18cm X 18cm像幅)或1. 5cm (23cm X23cm),综合法成图的控制点距航向边缘不应小于上述规定的1/2;d控制点距像片的各类标志应大于1mm;4、定向:定向点残余上下视差、同一航带模型连接差。
武汉大学航空摄影测量复习资料
绪言:遥感(Remote Sensing )R.S.:定义——不直接接触物体本身,而是通过电磁波来探测地球和其它星体的物体性质及特点的一门综合性的探测技术。
第一章感光测定定义——定量的研究光对感光层的作用,并以数量表示其特性的一种方法称为感光测定。
感光特性:感光度 S反差系数γ宽容度 L灰雾密度 D0感色性微观特性:分辨率 R清晰度 A颗粒度 RMS调制传递函数 MTF曝光量H ——感光材料的乳剂层在曝光时间内单位面积所受光通量的总和。
光学密度 D——感光材料经曝光显影后变黑的程度。
阻光率O=F0/F F0为入射光通量,F为出射光通量。
光学密度(密度):D=l g O景物的反差U:景物中最亮部分的亮度与最暗部分的亮度之比。
影像反差△D:影像的最大密度与最小密度之差。
感光测定的步骤:曝光摄影处理量测密度绘制特性曲线灰雾部分D0,趾部,直线部分,肩部,反转部分反差系数γ——特性曲线的直线部分的斜率γ=1 正确恢复了被摄景物的亮度差γ>1 夸大了被摄景物的亮度差γ<1 缩小了被摄景物的亮度差从数值上说明了景物反差与影像反差之间的关系,不受ΔD的影响,它是感光材料客观存在的特性,它受显影条件的影响。
宽容度L——感光材料能够按比例记录景物亮度的曝光量范围。
分辨率:感光材料能清晰表达被摄景物微小细部的能力。
第二章空中摄影物理基础1、大气对太阳辐射的吸收与散射作用有哪些异同点吸收:(1)H20、CO2吸收红外,O3吸收紫外,尘埃则是非选择性吸收;(2)改变了太阳辐射的内能,使直射阳光的辐射能降低;(3)吸收仅降低大气透射率,航空景物反差不变。
散射:(1)散射强度取决于大气中气体分子的含量,有瑞利散射和弥散射两种;(2)散射只改变太阳辐射的方向,不改变内能;(3)散射会产生空中蒙雾亮度,降低航空景物的反差。
2、能够穿过大气层的电磁波谱段称为大气窗口;无法穿过大气层的电磁波谱段称为大气屏障。
3、空中蒙雾亮度对航空、航天摄影的影响散射使天空发光,其亮度称为空中蒙雾亮度(δ1 )。
航空摄影测量 第一章

⑷对像片重叠度的要求
同一航线相邻像片之间的重叠称为航向重叠,应达到60%~65%,最小 56%,最大75%
相邻两条航线之间像片的重叠称为旁向重叠,应达到30%~35%,个别最 小不应小于13%
六度重叠区 三度重叠区 四度重叠区
航向重叠度≥60℅ 航向重叠 旁向重叠 旁向重叠到的航摄底片
数码航摄仪
影 像 分 辨 率
胶片影像分辨率:用“线对/mm”表示。反映了线条及
其背景间的特定反差比
数字影像分辨率:用“地面采样间隔GSD (Ground Sample Distance)”表示。
四 航摄成图对航摄资料及大地测量的要求
• 1、对摄影质量的技术要求
⑴航空摄影后所获得的航摄像片,首先目视检查应满足影像清晰、色 调一致、层次丰富、反差适中、灰雾度小的要求。 ⑵航摄像片上不应有云影、阴影、雪影。 ⑶航摄像片上不应有斑点、擦痕、折伤及其他情况的药膜损伤。 ⑷航摄像片上所有摄影标志(如圆水准器、时钟、框标、像片号等) 应齐全且清晰可辨。 ⑸航摄像片应具有一定的现势性。
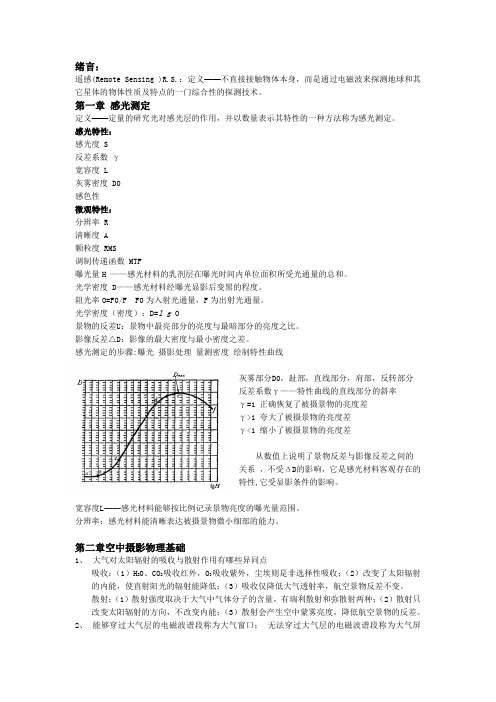
航空摄影测量的作业过程
航空摄影 航测外业
航空摄影
像控测量获取 GCPs
内业加密
解算像片外方位元素
Xs, Ys, Zs, , ,
测绘产品
前方交会解算地面点坐标
摄影比例尺的确定 航摄分区的划分
航摄准备
摄区基本情况分析 确定航摄设计用图
航 空 摄 影 的 流 程
基准面高度的确定
航线的敷设 航摄基本参数的计算 航摄季节和时间的选择 航摄仪的选择与检定 航摄胶片的选择与测定 配置冲洗药液 胶片冲洗 像片印制
6、摄影测量的产品——4D产品 DRG(Digital Raster Graphic) 数字栅格图 DLG (Digital Line Graphic) 数字线划图 DOM(Digital Orthophoto Map) 数字正射影像图 DEM(Digital Elevation Model) DSM (Digital Surface Model) 数字高程模型、数字表面模型
重点参考内容(摄影测量)复习

GPS辅助空间三角测量:就是利用机载GPS接收机与地面基站的GPS接收机同时、快速、连续的记录相同的GPS卫星信号,通过相对定位技术的离线数据处理后获得航摄飞行中摄站点相对于该地面基准点的三维坐标,将其作为区域网平差中的辅助数据用于区域网联合平差,从而可大量甚至省去地面控制点。
9:双像解析的相对定向 绝对定向法的主要过程是什么?P80
立体像对相对-绝对定向法解求模型点的地面坐标 其过程为
1 用连续像对或单独像对的相对定向元素的误差方程式解求像对的相对定向元素
2由相对定向元素组成左右像片的旋转矩阵R1 R2,并利用前方交会式求出模型点在像空间辅助坐标系中的坐标
像方坐标系用来表示像点的平面坐标和空间坐标
1像平面坐标系
2像空间坐标系
3像空间辅助坐标系
物方坐标系
1 地面测量坐标系
2地面摄影测量坐标系
4:航空像片上有哪些特殊的点、线、面?P22
像主点o 像底点n 等角点c 主合点I 主纵线vv 合线hihi 等比线 hchc 基本方向线 VV 主垂面 W
简答题
1:航空摄影测量对摄影过程及航摄资料有哪些要求?为什么要求航向重叠和旁向重叠?
摄影过程航空摄影前要做出计划,在做好地面准备工作之后,选择晴朗无云的天气,利用带有航摄仪的飞机或其他空载工具对地面进行摄影。飞行完毕后,将感光的底片进行摄影处理,得到航摄底片,称为负片。
航空摄影测量与遥感复习重点

摄影测量学定义:是利用光学或数码摄影机获取的影像,经过处理以获取被摄物体的形状、大小、位置、性质和相互关系的一门学科。
摄影测量的分类:(1)按摄站位置:1.航天摄影测量2.航空摄影测量3.地面摄影测量(2)按研究对象:1.地形摄影测量2.非地形摄影测量(3)按处理方法:1.模拟摄影测量2.解析摄影测量3.数字摄影测量摄影测量的主要任务:1.包括定量的(几何处理):解决是多少的问题、定性的(解译处理):解决是什么的问题摄影测量的发展历程:模拟摄影测量(1851-1960’s),解析摄影测量(1950’s-1980’s),数字摄影测量(1970’s-现在)。
遥感定义:是指通过非接触传感器遥测物体的几何与物理特性的一门学科。
遥感类型:按传感器探测波段分:1.紫外遥感:~.可见光遥感:~.红外遥感:~1000um4.微波遥感:1mm~10m5.多光谱遥感:可见光和近红外,多个波段。
2.按成像方式分:摄影遥感、扫描方式遥感;雷达遥感。
遥感技术系统的组成:由平台、传感、接收、处理应用各子系统所组成遥感特点与作用:1.大面积同步观测2.时效性强3.数据的综合性和可比性好4.较高的经济与社会效益5.一定的局限性。
摄影测量与遥感的关系:遥感技术为摄影测量提供了多种数据来源,从而扩大了摄影测量的应用领域。
航空摄影:又称航拍,是指在飞机或其他航空飞行器上利用航空摄影机摄取地面景物像片的技术。
航摄仪的类型:胶片航摄仪、数字航摄仪。
航空摄影测量的基本要求(主要是航向、旁向重叠度)航摄像片与地形图的区别像片倾斜角、摄影比例尺的概念航空像片上的三点两线、类型第二部分航空摄影测量基础第二章航测外业摄影测量外业工作任务像片判读、像片调绘像控点的选择原则(了解)像片调绘的内容(了解)第二部分航空摄影测量基础第三章内业加密像点位移的含义航空摄影测量两大坐标系统及其分类航空像片的内、外方位元素共线方程的含义、作用摄影测量解析计算的过程(理解四个流程的目的)数字摄影测量中的影像匹配有哪三种方式(了解)第二部分航空摄影测量基础第四章 4D产品生产解析空中三角测量的定义、分类理解GPS、POS辅助空中三角测量(了解)POS辅助空中三角测量的特点4D产品的概念(DEM、DOM、DLG、DRG)DEM的应用4D产品的生产(了解)第三部分遥感基础第一章电磁辐射与地物光谱特征电磁波及其性质。
摄影测量与遥感知识点
摄影测量与遥感知识点1.测绘航空摄影的作业流程①工作准备——②航摄设计——③航空摄影——④影像处理——⑤质量检查——⑥成果提交其中航摄设计包括:①航摄比例尺的确定②航摄分区的划分③基准面高度的确定④航线的敷设⑤航摄基本参数的计算⑥航摄季节和时间的选择⑦航摄仪的选择与检定⑧航摄胶片的选择与测定2.摄影分区原则①分区界线应与图廓线相一致;②分区内的地形高差一般不大于1/4 相对航高(摄影比例尺<1/7000),1/6 相对航高(摄影比例尺≥1/7000)③分区内的地物景物反差、地貌类型尽量一致④在地形高差允许的前提下,分区跨度应尽量大⑤当地面高差突变或有特殊要求时,征得用户同意可以破图廓划分分区⑥应考虑飞机侧前方安全距离和安全高度⑦当采用GPS 辅助空三航摄时,划分分区除遵守上述各项规定外,还应确保分区界线与加密分区界线相一致或一个摄影分区内可涵盖多个完整的加密分区3.航空摄影质量检查内容(飞行质量、影像质量、数据质量、附件质量)(1)飞行质量①像片重叠度⑤摄站航高差②像片倾斜角⑥航摄漏洞③像片旋偏角⑦航线偏差④航线弯曲度(2)影像质量①影像密度及反差②像点位移误差③框标和数据记录④清晰度、色彩等4.航测仪检定内容5.测绘航空摄影提交成果①航摄分区略图②航片索引图③航摄底片、像片④航摄仪检定表⑤航摄底片压平质量检测数据表⑥航摄底片密度抽样测定数据表⑦航摄飞行报告⑧附属仪器记录数据⑨成果质量检查报告⑩技术总结⑪航摄资料移交书⑫合同规定的其他资料6、航空摄影(遥感)影像预处理7、野外像片调绘作业的内容①准备工作②像片判读③综合取舍④着铅⑤询问调查⑥测量⑦补测新增地物⑧清绘⑨接边8.空中三角测量作业过程另外:区域网平差计算时,POS 和GPS 辅助空三测量需导入测站点坐标、外方位元素进行联合平差。
9.解析空中三角测量相片控制点的选点要求(1)选野外控制点时,应选在林间空地的明显地物点上。
(2)选加密控制点时(内业加密),应尽量选在林间空地的明显地物点上,若困难时,可选在左右像对和相邻航线清晰的树顶上。
摄影测量与遥感综合考试大纲北京航空航天大学1

872摄影测量与遥感综合考试大纲(2016版)一、考试组合摄影测量与遥感综合包含摄影测量基础、数字图像处理、遥感原理与应用三个科目, 任选两个科目, 每个科目分数分别为75分, 总分150分。
二、摄影测量基础部分考试大纲主要内容与基本要求1. 摄影测量的基本概念和基础知识主要内容: 摄影测量的定义、任务、发展概况;摄影测量常用坐标系、成像模型等。
基本要求: 掌握摄影测量学科的定义、基本任务、发展过程;熟悉摄影测量常用坐标系的建立、中心投影构像方程的建立。
2. 单张航摄像片解析主要内容: 航摄像片上的特殊点线面、航摄片段内、外方位元素、空间直角坐标变换、航摄片的像点位移与比例尺、单张航片的空间后方交会。
基本要求: 熟悉航空摄影中的基本几何关系、熟练掌握空间直角坐标变换、掌握单张航片的空间后方交会方法。
3. 双像解析摄影测量主要内容: 航摄像对的立体观察与测量、双像解析摄影测量的任务与方法、立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、模型点坐标的计算、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。
基本要求: 熟悉双像解析摄影测量的任务与方法、熟练掌握立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。
4. 数字摄影测量主要内容:基本概念, 数字图像与影像重采样、基于灰度的影像相关、基于特征的影像匹配、同名核线的确定与核线相关。
基本要求: 掌握数字摄影测量与模拟、解析摄影测量的区别与联系, 熟练掌握基于灰度的影像相关方法、基于特征的影响匹配, 掌握核线相关的方法。
5. 测图原理与测图仪器主要内容: 立体测图方法、模拟法测图原理、模拟测图仪的结构与分类;解析测图方法、解析法测图原理、解析测图仪的结构与分类。
基本要求: 掌握各种测图方法与仪器的原理。
6. 数字高程模型与其应用主要内容:基本概念, 数据点的获取、预处理、存储, 曲面的内插和逼近、曲线内插与逼近、等高线的绘制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摄影测量学定义:是利用光学或数码摄影机获取的影像,经过处理以获取被摄物体的形状、大小、位置、性质和相互关系的一门学科。
摄影测量的分类:(1)按摄站位置:1.航天摄影测量2.航空摄影测量3.地面摄影测量(2)按研究对象:1.地形摄影测量2.非地形摄影测量(3)按处理方法:1.模拟摄影测量2.解析摄影测量3.数字摄影测量
摄影测量的主要任务:1.包括定量的(几何处理):解决是多少的问题、定性的(解译处理):解决是什么的问题
摄影测量的发展历程:模拟摄影测量(1851-1960’s),解析摄影测量(1950’s-1980’s),数字摄影测量(1970’s-现在)。
遥感定义:是指通过非接触传感器遥测物体的几何与物理特性的一门学科。
遥感类型:按传感器探测波段分:1.紫外遥感:0.05~0.38um2.可见光遥感:0.38~0.76um3.红外遥感:0.76~1000um4.微波遥感:1mm~10m5.多光谱遥感:可见光和近红外,多个波段。
2.按成像方式分:摄影遥感、扫描方式遥感;雷达遥感。
遥感技术系统的组成:由平台、传感、接收、处理应用各子系统所组成
遥感特点与作用:1.大面积同步观测2.时效性强3.数据的综合性和可比性好4.较高的经济与社会效益5.一定的局限性。
摄影测量与遥感的关系:遥感技术为摄影测量提供了多种数据来源,从而扩大了摄影测量的应用领域。
航空摄影:又称航拍,是指在飞机或其他航空飞行器上利用航空摄影机摄取地面景物像片的技术。
航摄仪的类型:胶片航摄仪、数字航摄仪。
航空摄影测量的基本要求(主要是航向、旁向重叠度)
航摄像片与地形图的区别
像片倾斜角、摄影比例尺的概念
航空像片上的三点两线、类型
第二部分航空摄影测量基础第二章航测外业
摄影测量外业工作任务
像片判读、像片调绘
像控点的选择原则(了解)
像片调绘的内容(了解)
第二部分航空摄影测量基础第三章内业加密
像点位移的含义
航空摄影测量两大坐标系统及其分类
航空像片的内、外方位元素
共线方程的含义、作用
摄影测量解析计算的过程(理解四个流程的目的)
数字摄影测量中的影像匹配有哪三种方式(了解)
第二部分航空摄影测量基础第四章4D产品生产
解析空中三角测量的定义、分类
理解GPS、POS辅助空中三角测量(了解)
POS辅助空中三角测量的特点
4D产品的概念(DEM、DOM、DLG、DRG)
DEM的应用
4D产品的生产(了解)
第三部分遥感基础
第一章电磁辐射与地物光谱特征
电磁波及其性质。
(了解)
电磁波谱,常用的电磁波谱段?(了解)
大气散射类型,试说明其发生条件及主要影响波段。
大气窗口?
地物的反射率?地物反射有哪几种形式。
地物反射光谱?画出植被的反射光谱曲线,并做简要说明。
第二章遥感成像原理及遥感影像特征
传感器、传感器的分类
摄影型传感器主要类型?扫描型传感器类型?
雷达设计成侧视的原因?(了解)
雷达影像的特征?(了解)
合成孔径雷达影像具有良好的分辨率,在距离向和方位向主要采用了什么技术。
微波遥感的特性。
遥感数据的空间分辨率、波谱分辨率
常用的陆地资源卫星数据?(了解)
ETM影像共分几个波段,波段名称及各波段的分辨率
Quickbird全色波段数据的分辨率?(0.61m)。
Spot 5全色波段数据分辨率?5m。
第三章遥感影像处理-1
三原色,互补色,加色法?(了解)
颜色的性质?
数字图像
图像辐射畸变的原因?
简述如何运用直方图最小值去除法进行辐射纠正。
引起遥感图像几何变形的原因有哪些?
遥感图像几何校正的主要步骤
第四章遥感影像处理-2
为何要进行数字图像增强?遥感图像数字增强的方法?
给出一个模板,怎样求卷积运算后图像的数值?(了解)
比值运算有什么应用?
多光谱变换的目的是什么?主要有哪几种方法
主成分变换有什么特点?
一幅TM多光谱数据(30m)和一幅spot全色数据(10m)进行复合有哪些方法?复合有什么作用?第五章遥感图像目视解译
目视解译?
什么是遥感图像解译标志?主要解译标志有哪些?
简述遥感图像目视解译的步骤。
什么是遥感影像地图?遥感影像地图的特点、分类(了解)
第六章数字图像计算机解译
遥感图像计算机解译
监督分类常用的分类方法有哪些?
什么是非监督分类?(ISODATA步骤?)
第四部分航空摄影测量与遥感应用
主要的应用领域(自己总结PPT中的内容)
这章内容的重点就在于,既然已经学习了航空摄影测量与遥感课程,必须对它的应用方向有一定的认识和掌握。