手机蓝牙控制的智能车系统设计_余威明
基于安卓蓝牙控制的智能车设计报告

基于安卓蓝牙控制的智能车设计报告设计报告:基于安卓蓝牙控制的智能车一、引言智能车是指在汽车领域中应用了先进的计算机、物联网和传感器等技术的车辆,它可以自动感知周围环境并做出相应的反应。
本设计报告将介绍一种基于安卓蓝牙控制的智能车设计,旨在通过安卓手机与智能车之间建立蓝牙连接,实现对智能车的远程控制。
二、设计思路智能车的设计主要包括硬件设计和软件设计两个部分。
硬件设计主要包括车体结构设计、传感器布置和电路控制等;软件设计主要包括安卓手机应用的开发。
1.硬件设计智能车的车体结构应选择轻便坚固的材料制作,以满足高速行驶过程中的稳定性要求。
车体内部应布置传感器,如红外线传感器和超声波传感器,用于感知车辆周围环境。
此外,智能车还需要安装直流电机和舵机等电路控制元件来实现行驶和转向等功能。
2.软件设计软件设计主要针对安卓手机应用的开发。
首先,应编写安卓手机应用程序,通过蓝牙模块与智能车建立蓝牙连接。
然后,根据用户的指令,向智能车发送相应的控制信号,实现对智能车的远程控制。
同时,可以设计一个用户界面,显示智能车周围环境信息以及智能车的状态。
三、系统功能1.远程控制:通过安卓手机应用与智能车建立蓝牙连接,实现对智能车的远程控制,包括前进、后退、左转、右转等。
2.传感器感知:智能车内置红外线传感器和超声波传感器,可以感知车辆周围的障碍物并做出相应的反应,以避免碰撞。
3.环境信息显示:通过安卓手机应用的用户界面,显示智能车周围环境信息,包括障碍物距离、车速等。
四、系统实现系统实现主要包括软件编程和硬件部署。
1.软件实现首先,编写安卓手机应用程序,包括蓝牙连接的建立和控制信号的发送。
通过安卓手机的蓝牙模块与智能车建立蓝牙连接后,将用户输入的指令通过蓝牙发送给智能车,实现远程控制。
2.硬件实现搭建智能车主体结构,选用轻便坚固的材料,将直流电机和舵机安装在车体上,并连接相应的电路控制模块。
将红外线传感器和超声波传感器布置在车体上,可以接收到周围环境的信号。
基于安卓手机蓝牙控制的智能小车设计毕业论文
毕业设计(论文)设计(论文)题目:基于安卓手机蓝牙控制的智能小车设计摘要随着物联网的兴起,Android手机以其独有的开放性优势正在为我们提供更多优质便捷的技术成果。
本课题研究的是基于安卓手机蓝牙控制的智能小车设计,基于手机平台,借助于蓝牙技术,设计和实现了一种无线遥控小车新的解决方案。
设计以手机控制平台、蓝牙通讯模块、电机驱动模块等硬件模块组成的遥控小车。
实现小车的前进、后退、前左转弯、前右转弯、后左转弯、后右转弯等实时控制功能。
为遥控玩具小车的设计提出了一种新的思路,同时可以为将来智能家居的遥控设计提供一定的参考意义。
阐述一种通过手机蓝牙遥控小车行走的软、硬件设计。
手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端。
客户端采用Eclipse开发环境,JAVA编程,服务端采用单片机控制。
双方通过串口进行通信,单片机驱动直流电机控制小车行动。
实验结果表明,小车可以接收手机遥控信号并灵活地进行前行、倒退、左转、右转和停止等功能。
本文介绍了基于安卓手机的蓝牙智能小车控制要实现的功能,接着阐述该系统电路的设计及原理的说明,包括了方案的设计、重要元器件的介绍、电路设计的说明(包括单片机控制电路、电机驱动电路)安卓手机软件界面设计、软件设计流程以及系统的调试。
最后总结了基于安卓的蓝牙智能小车控制设计完成的任务,分析系统出现的不足。
【关键词】Andriod蓝牙智能小车智能手机AT89C52单片机ABSTRACTWith the rise of the Internet of Things, Android phones with its unique advantage of being open for us to provide more quality and convenient technological achievements. The research is based on the Android mobile phone Bluetooth controlled smart car design, based on mobile platforms, by means of Bluetooth technology, design and implementation of a wireless remote control car new solutions. Control platform designed for mobile phones, Bluetooth communication module, motor drive modules and other hardware modules remote control car. Realize the car forward, backward, turn left in front, front right turn after turn left, turn right after the other real-time control functions. For the remote control toy car design presents a new way of thinking, and can for the future smart home remote control designed to provide some reference value.Describes one kind of walking through the phone's Bluetooth remote control car software and hardware design. Bluetooth mobile phone as a client, a small car Bluetooth Module HC-06 as a server. Clients using the Eclipse development environment, JAVA programming, client services using micro-controller. The two sides communicate through the serial port, the microcontroller drive DC motor control car action. Experimental results show that the car can receive mobile phone remote control signals and the flexibility to move forward, backward, turn left, turn right and stop functions.Introduces the based on Andrews's the Bluetooth intelligent trolley control want to achieve the function is trolley be able to forward, backward, turn left, turn right, then expounded that the system circuit design and principle of description, including the program design, it is important components introduction, circuit design Description of (, including SCM control circuit, the motor drive circuit) Andrews mobile phone software interface design, software design flow as well as system debugging. Finally summed up the based on Andrews's the Bluetooth intelligent trolley control design is completed the task of, analysis system appear deficiencies.【Key words】Andriod Bluetooth Intelligent car Smartphone AT89C52 SCM目录前言 (1)第一章绪论 (2)第一节国内外研究现状 (2)第二节发展趋势分析 (4)第三节本章小结 (4)第二章设计方案分析 (5)第一节设计方案分析确定 (5)第二节本章小结 (8)第三章安卓操作系统概述 (9)第一节安卓操作系统发展历史及趋势 (9)第二节 Android开发环境搭建 (9)一、 Android的基本介绍 (9)二、 Android系统构架 (10)三、 Android开发包及其工具的安装和配置 (11)第三节本章小结 (13)第四章系统硬件电路设计 (14)第一节单片机最小系统 (14)第二节电机驱动模块 (17)第三节蓝牙模块 (21)第四节本章小结 (22)第五章系统软件程序设计 (23)第一节主程序设计 (23)第二节手机端程序设计 (25)一、手机界面程序设计 (27)二、手机监听程序设计 (28)第三节本章小结 (29)第六章系统整体的调试 (31)第一节调试的方案 (31)第二节硬件电路调试 (31)一、独立元件的检测 (31)二、单片机最小系统的调试 (33)三、电源电路的测试 (34)四、驱动电路的调试 (34)第三节软件调试 (37)第四节系统整体调试 (38)第五节本章小结 (40)结论 (41)致谢 (43)参考文献 (44)附录 (46)一、英文原文 (46)二、英文翻译 (54)三、源程序 (60)前言遥控小车是玩具市场一种很常见的玩具,但是每个小车都有自己特定的遥控器,原装遥控器坏了很难与其它型号的进行匹配。
智能小车蓝牙控制技术设计方案

智能小车蓝牙控制技术设计方案一、引言智能小车是一种可以通过蓝牙进行远程控制的无人驾驶车辆。
在本设计方案中,我们将介绍智能小车蓝牙控制技术的设计和实现方法。
二、设计目标本设计方案的目标是实现通过蓝牙控制智能小车的前进、后退、转向和停止等功能。
同时,还要保证通信的可靠性和稳定性。
三、硬件设计1.MCU选择我们选择一款性能强大且低功耗的MCU芯片,如STM32系列。
该芯片具有高度集成、高性能和低功耗的特点,适合用于嵌入式系统的设计。
2.传感器智能小车需要依靠传感器来获取周围环境信息,以实现自主导航和避障功能。
常用的传感器包括红外线传感器、超声波传感器等。
这些传感器将与MCU进行连接,提供实时数据。
3.电机驱动为实现小车的运动控制,我们需要选择合适的电机驱动器件。
DC电机驱动器件常用的有L298N、L293D等,可以方便地控制电机的运动方向和速度。
4.蓝牙模块我们需要选择一款蓝牙模块,实现小车与远程设备的通信。
常用的蓝牙模块包括HC-05、HC-06等,它们可以通过串口与MCU进行通信。
四、软件设计1.系统架构我们将使用C语言编写嵌入式系统的固件代码,实现小车的运动控制、通信和传感器数据的处理等功能。
固件代码将运行在MCU上,通过与蓝牙模块和传感器的交互,实现智能小车的控制和数据处理。
2.蓝牙通信协议为了实现蓝牙控制功能,我们需要定义一套通信协议。
例如,可以通过串口发送指令来控制小车的运动,如前进、后退、左转、右转和停止等指令。
同时,小车也需要可以向远程设备发送传感器数据,如距离、温度等信息。
3.控制算法小车的运动控制算法可以根据具体的需求进行设计。
例如,可以根据传感器数据判断小车是否遇到障碍物,并进行相应的避障动作。
同时,还可以根据远程设备传输的指令实现运动控制。
五、测试和优化在完成硬件和软件设计后,我们需要对设计的智能小车进行测试并进行优化。
首先,我们可以通过调试工具和调试指令来验证代码的正确性。
然后,我们可以通过模拟实际场景来测试小车的功能和性能,例如在不同的地形和环境下测试小车的运动控制和避障功能。
基于蓝牙遥控的智能小车设计
摘要随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
遥控小车起源于美国,由于政府对无线遥控小车研发的资助以及相关资助的推动作用,日本、美国、德国等工业大国在遥控小车技术上占据着明显优势。
我国的无线遥控小车研究工作始于20世纪中后期,在国家的863、973等技术发展计划的重点支持下,国内已大范围地进行无线遥控小车的研究。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究,但是与国际先进还存在一定的差距。
可见其研究意义很大。
本设计就是在这样的背景下提出的。
设计的智能电动小车能够实现无线遥控,串口通讯,实时检测速度,避障碍等功能。
无线遥控实现方法包括蓝牙、红外、射频几种,其中蓝牙技术具有一定优势,目前在信息家电方面应用正在铺设。
各种家电共用遥控,并可组网与公众互联网相接,共享有用信息。
目前蓝牙技术实现无线遥控的短板在于传输距离短和芯片价格高方面。
但随着科技发展,这些问题正在逐步得以解决。
无线遥控机器人有着广阔的应用前景。
无线遥控的小车,可以在危险的环境作业,人员搜索,可以在各类领域中发挥着它特殊的作用,本次设计是选择基于蓝牙遥控的多功能智能小车为对象。
控制系统以C51单片机为主控芯片,采用L298N为电机驱动芯片、HC-06蓝牙无线模块、12864液晶显示模块、四路循迹模块等构成外围扩展电路。
将自制的控制电路、控制程序和四轮小车机械相结合,制作多功能智能小车。
实验调试实现了智能小车的蓝牙无线遥控、自动避障、自动测距及各种灯光的功能。
关键词:51单片机;蓝牙遥控;智能小车目录摘要 (1)1. 绪论 (3)1.1课题目的 ....................................................1.2课题研究内容 ................................................2 .方案论证 (3)2.1 总体方案设计................................................2.2设计系统的功能要求 ..........................................2.3 系统硬件方案................................................3.系统硬件设计 (4)3.1STC89C52芯片简介 ............................................3.2 STC89C52最小系统...........................................3.3电机驱动设计 ................................................3.4显示电路设计 ................................................3.5 蓝牙模块设计................................................3.6 PCB图设计 ..................................................3.7 智能车结构分析..............................................3.7.1 底板设计.............................................3.7.2电机与底板的连接支架设计..............................3..7.3整体装配图...........................................4.系统软件设计 (10)4.1系统的程序流程 ..............................................4.2蓝牙模块参数设置程序 ........................................4.3蓝牙发送程序接收程序和中断程序 ..............................4.4自动避障及灯光声音控制程序设计 ..............................4.5液晶显示程序设计 ............................................5 . 调试结果分析 (17)5.1蓝牙遥控调试及结果分析 ......................................5.2避障功能调试及结果分析 ......................................6.参考文献\ 附录程序 (18)21.绪论1.1课题目的本次设计的小车是具有无线遥控功能的。
基于安卓手机控制的智能小车的设计
基于安卓手机控制的智能小车的设计摘要:21世纪是信息化世纪,随着物联网兴起,安卓手机以其独有的优势,为我们提供很多优质便捷的服务。
此次设计我们研究的是用我们的安卓手机来操控智能小车,使小车实现前进、后退、左转、右转等功能,提供了一种遥控玩具车设计的新方法。
系统是以STC89C52作为控制中心,客户端为蓝牙手机,服务端为车子上的蓝牙模块,串口是进行通信的通道,小车在接收到手机发送的蓝牙信号之后,可以进行简单的一些动作。
本文介绍了基于安卓手机控制的智能小车要实现的功能,首先阐述了课题研究的背景、目的、意义以及主要的任务,接着阐述了系统方案的设计,硬件和软件两个方面的设计,再到后来的测试方案与测试结果,同时,对使用的一些元器件及原理进行了相应的介绍,然后对此设计进行了设计归纳与展望。
关键词:Android手机;蓝牙;智能小车; AT89C52单片机The design of the smart car basedon android mobile phonesAbstract:21st century is the era of information,with the emergence and prosperity of Internet,the Android Mobile phone offers us more premium and convenience services with its unique advantages.This design of our research is to control the car with android phone,make the car forward,backward,turn left,turn right,and other function, provides a new method for designing the remote control toy car.This system is based on STC89C52 as control center,the client for the mobile phone,the server for the bluetooth module on the car,the channels of communication is through serial port,the car after receive the bluetooth signal sent by a mobile phone,can conduct some simple movement.This chapter presents how to realized the android phone to control the smart car to realize some actions.First of all,the research background purpose,significance and the main tasks are expounded.Secondly,this paper discusses the system scheme and the design of software and hardware.Finally,summarizes the test scheme and results,meanwhile,the use of the components and principles for the corresponding introduction,at the same time,this design has carried on the summary and outlook.Keywords:Android mobile phone; Bluetooth; Intelligent car; AT89C52 single chip microcomputer目录前言 (1)第一章绪论 (2)1.1 课题背景 (2)1.2 课题研究的目的及意义 (2)1.3 系统设计主要任务 (2)第二章系统方案设计 (4)2.1 主控芯片的论证选择 (4)2.2 电源模块的论证选择 (4)2.3 电机驱动模块的选择 (5)2.4 蓝牙模块的选择 (5)第三章硬件电路的设计 (7)3.1 单片机最小系统的设计 (7)3.1.1单片机AT89C52 (8)3.1.2时钟电路 (9)3.1.3复位电路 (9)3.1.4 EA/VPP(31脚) (9)3.2 电机驱动电路的设计 (10)3.2.1 L298N型驱动器的原理 (10)3.2.2 L298N的引脚说明 (10)3.2.3 电机驱动电路原理图 (11)3.3 蓝牙模块电路的设计 (11)第四章软件设计 (13)第五章系统的调试 (14)5.1 测试方案 (14)5.2 硬件电路的测试 (14)5.2.1 单片机最小系统的调试 (14)5.2.2 电源电路的调试 (15)5.2.3 电机驱动模块的调试 (15)5.3 软件测试 (15)5.4 系统的整体调试 (15)第六章设计总结及展望 (17)参考文献 (18)附录1 系统设计程序 (19)附录2 实物图 (21)前言在中国,安卓手机已经非常普遍,普及率非常高,通过移动设备实现远程控制已经是人们追求和探索的一个方向。
智能小车系统的设计与制作
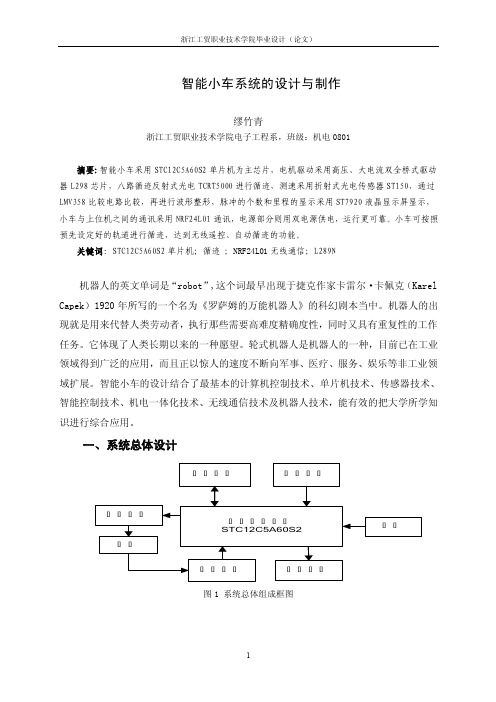
智能小车系统的设计与制作缪竹青浙江工贸职业技术学院电子工程系,班级:机电0801摘要:智能小车采用STC12C5A60S2单片机为主芯片,电机驱动采用高压、大电流双全桥式驱动器L298芯片,八路循迹反射式光电TCRT5000进行循迹,测速采用折射式光电传感器ST150,通过LMV358比较电路比较,再进行波形整形,脉冲的个数和里程的显示采用ST7920液晶显示屏显示,小车与上位机之间的通讯采用NRF24L01通讯,电源部分则用双电源供电,运行更可靠。
小车可按照预先设定好的轨道进行循迹,达到无线遥控、自动循迹的功能。
关键词:STC12C5A60S2单片机;循迹 ;NRF24L01无线通信;L289N机器人的英文单词是“robot ”,这个词最早出现于捷克作家卡雷尔·卡佩克(Karel Capek )1920年所写的一个名为《罗萨姆的万能机器人》的科幻剧本当中。
机器人的出现就是用来代替人类劳动者,执行那些需要高难度精确度性,同时又具有重复性的工作任务。
它体现了人类长期以来的一种愿望。
轮式机器人是机器人的一种,目前已在工业领域得到广泛的应用,而且正以惊人的速度不断向军事、医疗、服务、娱乐等非工业领域扩展。
智能小车的设计结合了最基本的计算机控制技术、单片机技术、传感器技术、智能控制技术、机电一体化技术、无线通信技术及机器人技术,能有效的把大学所学知识进行综合应用。
一、系统总体设计 单单单单单单STC12C5A60S2单单单单单单单单单单单单单单单单单单单单单单单单图1 系统总体组成框图根据题目要求,系统可以划分为8个基本模块。
单片机主系统模块、电机驱动模块、循迹模块、测速模块、无线通讯模块、液晶模块、上位机控制模块、电源模块。
系统总体设计图如图1所示。
(一)单片机主系统单片机主系统以STC12C5A60S2单片机为主控芯片,该单片机包含了中央处理器,程序储存器,数据存储器,定时器/计数器、UART串口,串口2、I/O接口、高速A/D 转换、SPI接口、PWM(2)路/PCA、看门狗及片内R/C振荡器和外部晶体振荡电路等模块。
基于安卓手机蓝牙控制的智能小车设计
基于安卓手机蓝牙控制的智能小车设计智能小车是一种集成了多种智能技术的机械装置,可以通过蓝牙控制进行操作。
本文将基于安卓手机蓝牙控制的智能小车设计进行详细介绍。
1.设计背景和目标智能小车是近年来智能家居和物联网技术的热门应用之一、本设计旨在通过安卓手机蓝牙控制,实现对小车的远程操控,并能够获取小车的状态数据。
2.硬件设计本设计所需的硬件主要有:安卓手机、Arduino控制器、蓝牙模块、直流电机和车轮。
2.1 Arduino控制器Arduino控制器作为智能小车的主控,负责接收蓝牙模块发送的指令,并控制直流电机完成相应的运动。
2.2蓝牙模块蓝牙模块负责与安卓手机进行通信。
当用户在手机上发送指令时,蓝牙模块将指令通过串口发送给Arduino控制器。
2.3直流电机和车轮直流电机是智能小车的推动力源,通过车轮将电机的转动转化为小车的运动。
可以根据实际需要选择单个电机或多个电机的配置。
3.软件设计本设计主要涉及两个方面的软件设计:安卓手机控制应用和Arduino控制程序。
3.1安卓手机控制应用安卓手机控制应用是用户与智能小车交互的界面。
用户可以通过应用界面发送指令给小车,控制其前进、后退、转向等行为。
应用还可以显示小车的实时状态数据,例如电池电量、速度等。
3.2 Arduino控制程序Arduino控制程序是小车的控制逻辑,通过与蓝牙模块的通信接收指令,并控制直流电机完成相应的动作。
可以根据用户指令的不同,控制电机正转、反转或停止。
4.系统功能本设计的智能小车主要具备以下功能:1)远程控制:通过安卓手机控制应用,用户可以远程控制小车的行动。
2)实时数据显示:应用可以显示小车的实时状态数据,方便用户了解小车的工作状态。
3)电量提醒:当小车的电池电量低于设定值时,应用将会提醒用户及时充电。
4)编程扩展性:用户可以通过简单的编程方式扩展小车的功能,例如添加避障传感器、红外遥控等模块。
5)兼容性:本设计兼容大多数安卓手机,并且可以与其他智能设备进行蓝牙通信。
基于蓝牙遥控的智能小车设计
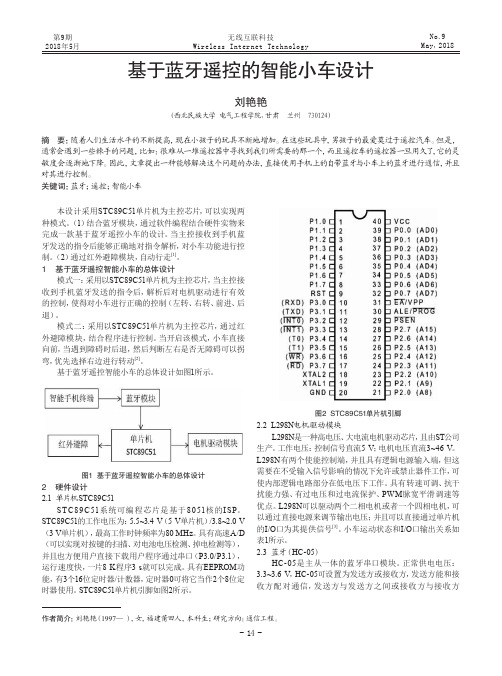
模式一:采用以STC89C51单片机为主控芯片,当主控接 收到手机蓝牙发送的指令后,解析后对电机驱动进行有效 的控制,使得对小车进行正确的控制(左转、右转、前进、后 退)。
扰能力强、有过电压和过电流保护、PWM脉宽平滑调速等 优点。L298N可以驱动两个二相电机或者一个四相电机,可 以通过直接电源来调节输出电压;并且可以直接通过单片机 的I/O口为其提供信号[3]。小车运动状态和I/O口输出关系如 表1所示。 2.3 蓝牙(HC-05)
H C - 0 5是 主 从一体的蓝 牙串口模 块。正常供电电压: 3.3~3.6 V,HC-05可设置为发送方或接收方,发送方能和接 收方 配 对 通 信,发 送 方与发 送 方 之 间或 接 收 方与 接 收 方
牙 笔 记 本电 脑、电 脑 加 蓝 牙 适 配 器 、P DA等设备进 行 无 缝连接[4],蓝牙模块如图3所示。
右电机 正转 反转 停 正转 正转 反转
N o .9 M a y,2 018
电机车运动状态 前行 左转
以电机为中心左转 右转
以电机为中心右转 后退
图3 蓝牙模块 2.4 E18-D80NK红外避障
[参考文献] [1]潘永雄.新编单片机原理与应用[M].2版.西安:西安电子科技大学出版社,2008. [2]戴佳,戴为恒,刘博文.51单片机C语言应用程序设计实例精讲[M].2版.北京:电子工业出版社,2008. [3]孙荣高,孙德超.数字温湿度数据记录仪的设计[J].现代电技术,2005(7):74-76. [4]杨永杰,冯军.数字式温湿度传感器SHTI1在尘埃检测仪中的应用[J].电子工程师,2005(8):64-66. [5]李泉溪.单片机原理与应用实例仿真[M].北京:北京航空航天大学出版社,2009.
基于蓝牙遥控的智能小车设计定稿版

基于蓝牙遥控的智能小车设计定稿版设计定稿:基于蓝牙遥控的智能小车1.引言在现代社会,智能技术的应用越来越广泛。
智能小车作为一种基于蓝牙遥控技术的代表,具有广泛的应用前景。
本文将设计一款基于蓝牙遥控的智能小车,具备自动避障、远程遥控等功能,提高用户的使用体验。
2.设计思路本设计的目标是设计一款具备自动避障和远程遥控功能的智能小车。
小车通过蓝牙模块和手机进行通信,实现远程控制;同时,搭载超声波避障传感器,能够自动检测前方障碍物并及时避让。
3.系统组成本设计的智能小车主要由以下部分组成:3.1蓝牙模块蓝牙模块是小车与手机进行通信的关键。
通过蓝牙模块,手机可以发送指令给小车,控制小车的运动。
3.2电机驱动模块电机驱动模块负责驱动小车的轮子运动。
通过电机驱动模块,可以控制小车的前进、后退、左转、右转等动作。
3.3超声波避障传感器超声波避障传感器可以实时检测小车前方的障碍物。
当检测到障碍物时,系统将自动采取行动,避开障碍物。
3.4控制单元控制单元是整个系统的核心,负责对各个模块的协调和控制。
通过编程实现相应的逻辑判断,实现智能避障和远程遥控功能。
4.实现过程4.1硬件实现硬件上,需要购买相应的模块和传感器,并通过连接线将它们连接起来。
具体来说,将蓝牙模块与电机驱动模块、超声波避障传感器分别连接,形成一个通路。
4.2软件实现软件上,需要进行程序的编写。
编写程序的目标是实现手机与小车的蓝牙通信和小车的自动避障功能。
通过与手机的蓝牙通信,可以实现对小车的远程控制;通过超声波避障传感器的数据读取,可以判断前方是否有障碍物,并通过电机驱动模块控制小车的动作,实现自动避障。
5.应用场景本设计的智能小车可以用于各种场景,如家庭娱乐、科研教育等。
比如,在家庭娱乐中,人们可以通过手机遥控小车,进行远程竞速、遥控抓取等游戏;在科研教育中,小车的自动避障功能可以帮助学生了解传感器和智能控制系统的运作原理。
6.总结本文设计了一款基于蓝牙遥控的智能小车,通过手机远程控制和超声波避障传感器实现了自动避障功能。
推荐-基于安卓手机蓝牙控制的智能小车设计 精品
编号:审定成绩:()设计()题目:基于安卓手机蓝牙控制的智能小车设计学院名称:自动化学生姓名:专业:测控技术与仪器班级:学号:指导教师:答辩组负责人:填表时间:20XX 年 05 月制摘要随着物联网的兴起,Android手机以其独有的开放性优势正在为我们提供更多优质便捷的技术成果。
本课题研究的是基于安卓手机蓝牙控制的智能小车设计,基于手机平台,借助于蓝牙技术,设计和实现了一种无线遥控小车新的解决方案。
设计以手机控制平台、蓝牙通讯模块、电机驱动模块等硬件模块组成的遥控小车。
实现小车的前进、后退、前左转弯、前右转弯、后左转弯、后右转弯等实时控制功能。
为遥控玩具小车的设计提出了一种新的思路,同时可以为将来智能家居的遥控设计提供一定的参考意义。
阐述一种通过手机蓝牙遥控小车行走的软、硬件设计。
手机蓝牙作为客户端,小车上的蓝牙模块HC-06作为服务端。
客户端采用Eclipse开发环境,JAVA编程,服务端采用单片机控制。
双方通过串口进行通信,单片机驱动直流电机控制小车行动。
实验结果表明,小车可以接收手机遥控信号并灵活地进行前行、倒退、左转、右转和停止等功能。
本文介绍了基于安卓手机的蓝牙智能小车控制要实现的功能,接着阐述该系统电路的设计及原理的说明,包括了方案的设计、重要元器件的介绍、电路设计的说明(包括单片机控制电路、电机驱动电路)安卓手机软件界面设计、软件设计流程以及系统的调试。
最后总结了基于安卓的蓝牙智能小车控制设计完成的任务,分析系统出现的不足。
【关键词】Andriod蓝牙智能小车智能手机AT89C52单片机ABSTRACTWith the rise of the Internet of Things, Android phones with its unique advantage of being open for us to provide more quality and convenient technological achievements. The research is based on the Android mobile phone Bluetooth controlled smart car design, based on mobile platforms, by means of Bluetooth technology, design and implementation of a wireless remote control car new solutions. Control platform designed for mobile phones, Bluetooth munication module, motor drive modules and other hardware modules remote control car. Realize the car forward, backward, turn left in front, front right turn after turn left, turn right after the other real-time control functions. For the remote control toy car design presents a new way of thinking, and can for the future smart home remote control designed to provide some reference value.Describes one kind of walking through the phone's Bluetooth remote control car software and hardware design. Bluetooth mobile phone as a client, a small car Bluetooth Module HC-06 as a server. Clients using the Eclipse development environment, JAVA programming, client services using micro-controller. The two sides municate through the serial port, the microcontroller drive DC motor control car action. Experimental results show that the car can receive mobile phone remote control signals and the flexibility to move forward, backward, turn left, turn right and stop functions.Introduces the based on Andrews's the Bluetooth intelligent trolley control want to achieve the function is trolley be able to forward, backward, turn left, turn right, then expounded that the system circuit design and principle of description, including the program design, it is important ponents introduction, circuit design Description of (, including SCM control circuit, the motor drive circuit) Andrews mobile phone software interface design, software design flow as well as system debugging. Finally summed up the based on Andrews's the Bluetooth intelligent trolley control design is pleted the task of, analysis system appear deficiencies.【Key words】Andriod Bluetooth Intelligent car Smartphone AT89C52 SCM目录前言 (1)第一章绪论 (2)第一节国内外研究现状 (2)第二节发展趋势分析 (4)第三节本章小结 (4)第二章设计方案分析 (5)第一节设计方案分析确定 (5)第二节本章小结 (8)第三章安卓操作系统概述 (9)第一节安卓操作系统发展历史及趋势 (9)第二节 Android开发环境搭建 (9)一、 Android的基本介绍 (9)二、 Android系统构架 (10)三、 Android开发包及其工具的安装和配置 (11)第三节本章小结 (13)第四章系统硬件电路设计 (14)第一节单片机最小系统 (14)第二节电机驱动模块 (17)第三节蓝牙模块 (21)第四节本章小结 (22)第五章系统软件程序设计 (23)第一节主程序设计 (23)第二节手机端程序设计 (25)一、手机界面程序设计 (27)二、手机监听程序设计 (28)第三节本章小结 (29)第六章系统整体的调试 (31)第一节调试的方案 (31)第二节硬件电路调试 (31)一、独立元件的检测 (31)二、单片机最小系统的调试 (33)三、电源电路的测试 (34)四、驱动电路的调试 (34)第三节软件调试 (37)第四节系统整体调试 (38)第五节本章小结 (40)结论 (41)致谢 (43)参考文献 (44)附录 (46)一、英文原文 (46)二、英文翻译 (54)三、源程序 (60)前言遥控小车是玩具市场一种很常见的玩具,但是每个小车都有自己特定的遥控器,原装遥控器坏了很难与其它型号的进行匹配。
基于Android手机蓝牙控制的智能小车设计
第 39 卷第 12 期
132
doi:10.16652/j.issn.1004⁃373x.2016.12.036
Jun. 2016
Vol. 39 No. 12
现代电子技术
Modern Electronics Technique
基于 Android 手机蓝牙控制的智能小车设计
less communication. It also provides a certain reference significance for the future design of wireless car and modern smart home.
Keywords:bluetooth communication;mobile intelligent terminal;intelligent car;vehicle⁃mounted electronics
汤莉莉 1,黄
(1.湖北大学知行学院,湖北 武汉
摘
伟2
430011;2.湖北航天技术研究院 总体设计所,湖北 武汉
430040)
要:基于 Android 平台,借助于蓝牙通信技术,为无线智能小车的设计提供一种新的研究方法。该设计把蓝牙、无
线电子技术、单片机技术和 Android 移动智能终端ቤተ መጻሕፍቲ ባይዱ台结合在一起,在小车硬件基础上设计蓝牙控制的无线智能小车。通过
统中的应用有很大的前瞻性;第三,移动智能终端设备
在人们的生活中越来越重要,人类已经进入了移动互联
droid 手机 APP 设计,如图 1 所示。本设计需要达到的目
标如下:
(1)可以通过 Android 手机客户端操作界面实现小
基于安卓手机蓝牙控制的智能小车设计毕业论文设计
编号:审定成绩:毕业设计(论文)设计(论文)题目:基于安卓手机蓝牙控制的智能小车设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日摘要随着物联网的兴起,Android手机以其独有的开放性优势正在为我们提供更多优质便捷的技术成果。
本课题研究的是基于安卓手机蓝牙控制的智能小车设计,基于手机平台,借助于蓝牙技术,设计和实现了一种无线遥控小车新的解决方案。
基于Android手机蓝牙控制的智能小车设计与实现

最后 , 根 据 各 个指 标 层 的 因素 对 整 个 系 统 影 响 的 权 重 与 隶属 度 ,可 得 B m= ( 0 . 3 3 5 8 ,0 . 2 4 9 3 ,0 . 2 2 7 1 ,0 . 1 8 7 8 ) ,可知, 伺 服 系 统 在 机 床 中可 能 出 现 的 故 障 最大 。
B1 =( 0 . 3 7 2 5 , 0 . 2 31 7 , 0 . 2 6 31 , 0 . 1 3 2 7 ) : B2 =( 0 . 3 2 5 8 , 0 . 1 8 7 3 , 0 . 2 9 1 5,0 . 1 9 5 4 ) :B3 =( 0 . 2 8 9 6 ,0 . 2 7l l ,0 . 2 6 5 2,0 . 1 7 4 1 ) 。
『 7 ] Me h r a b i M G,Ul s o y A G,Ko r e n Y. Re c o n ig f u r a b l e
ma n u f a c t u r i n g s y s t e ms : Ke y t o f u ur t e
[ 5 ] Z e k i A. A F u z z y AH P — b a s e d S i mu l a t i o n A p p r o a c h t o C o n c e p t E v a l u a t i o n i n a N P D E n v i r o n me n t [ J ] . I I E T r a n s a c t i o n s , 2 0 0 5 , 3 7 ( 9 ) : 8 2 7 — 8 4 2 . [ 6 ] 朱 剑 英.现 代 制 造 系统 模 式 、建 模 方 法 及 关键 技 术 的 新 发展 [ J ] . 机械 工 程 学报 , 2 0 0 0 , 3 6 ( 8 ) : 1 — 5 . 静 . 多 目标 决 策 分 析 理论 、 方 法 与 决 策研 究[ M] . 上海: 东 华 大 学 出版 社 , 2 0 0 8 . [ 2 】 王莲芬, 许树柏. 层 次 分析 法 引论 [ M】 . 北 京: 中 国人 民
基于安卓蓝牙控制的智能车设计报告
摘要:在科技日益发展地今天,无线遥控地机器人小车在危险环境作业、人员搜集等应用中可发挥特殊地作用.智能车作为智能车辆地仿真车,是研究智能车辆地基础.介绍了基于蓝牙遥控地多功能智能车.该设计采用STC89C52RC芯片为主控制器,利用L298N芯片驱动直流电机.同时利用安卓手机蓝牙无线遥控小车进入蓝牙手动模式,循迹模式和避障模式.在蓝牙模式下小车采用蓝牙模块利用Android平台远程控制小车地移动;在循迹模式下,采用红外光对管对黑线检测,判断出黑线地位置,将采集到地路况信息输入STC89C52单片机中,让小车沿着黑线自动行驶;在避障模式下,让小车自由移动,避障模块将使小车不会撞上障碍物.为了避免小车撞上障碍物,该小车使用了HS-RS04超声波模块,通过超声波地发射与接受来确定障碍物地位置,避免小车撞上障碍物.关键词:智能车;51单片机;蓝牙通讯;超声波测距;红外检测;目录1 方案比较与论证 (1)1.1 循迹单元方案比较与选择 (1)1.2 避障单元方案比较与选择 (1)1.3 无线单元方案与比较 (2)2 硬件电路设计 (3)2.1 总体设计 (3)2.2 单片机模块 (3)2.2.1 STC89C52简介 (3)2.3 电机驱动模块 (4)2.3.1 参数 (4)2.4 电源模块 (6)2.5 蓝牙模块 (6)2.6 循迹模块 (7)2.7 避障模块 (7)3 软件设计 (8)3.1 智能车运动控制程序 (8)3.1.1 智能车运动控制程序构思与框架 (8)3.1.2 智能车基础运动设计与实现 (11)3.1.3 串口通讯接口部分 (13)3.1.4 智能车蓝牙手动模式设计与实现 (14)3.1.5 智能车自主循迹模式设计与实现 (16)3.1.6 智能车自动避障模式设计与实现 (17)3.2 Android蓝牙客户端设计与实现 (20)3.2.1 客户端界面设计 (20)3.2.2 BluetoothCar类设计 (20)4 系统测试与结论 (20)4.1 硬件电路调试 (20)4.1.1 独立元件地检测 (20)4.1.2 单片机最小系统地调试 (21)4.1.3 电源电路地调试 (21)4.1.4 驱动模块地调试 (21)4.2 软件调试 (22)4.2.1 C语言地调试 (22)4.2.2 JAVA语言地调试 (22)4.3 制作总结 (23)参考文献 (23)附录一:原理图 (24)附录二:源程序 (26)1方案比较与论证1.1循迹单元方案比较与选择方案一:采用可见光发光二极管和光敏二极管采用普通可见光发光管和光敏管组成地发射-接收电路.其缺点在于易受到环境光源地影响.即便提高发光管亮度也难以抵抗外界光地干扰.方案二:采用反射式红外发射-接收器采用反射式红外发射-接收器.直接用直流电压对发射管进行供电,其优点是实现简单,对环境光源地抗干扰能力强,在要求不高时可以使用.结论:根据成本和实现容易性,以及由于传感器可以在车体地下部,发射、接收距地面都很近,外界光对其地干扰都很小.在基本不影响效果地前提下,为了简便起见,系统选用了方案二.1.2避障单元方案比较与选择方案一:超声波探测超声波测距对色彩和光照不敏感,可用于识别透明及漫反射性地物体,可在黑暗、有灰尘或烟雾地环境当中使用,超声波测距对电磁场及其他电磁干扰不敏感,可用于电磁干扰强、有毒、有害等恶劣环境中,超声波传感器结构简单、体积小、成本低、技术难度小、信息处理简单可靠、易于小型化和集成化.当然超声波测距也有一定地缺点,比如受温度、气流、材质地影响.方案二:红外式探测光电对管价格低廉,性能稳定,但探测距离过近(一般不超过3cm),使得小车必须制动迅速.而我们由于采用普通直流电机作为原动力,制动距离至少需要10cm.方案三:雷达探测雷达测距受恶劣天气地影响比较大,且成本比较高,雷达还必须满足电磁兼容要求.方案四:使用视频采集处理装置进行探测使用CCD实时采集小车前进路线上地图像并进行实时传输及处理,这是最精确地障碍物信息采集方案,可以对障碍物进行精确定位和测距.但是使用视频采集会大大增加小车成本和设计开发难度,而且考虑到我们小车行进转弯地精确度并未达到视频处理地精度,因而使用视频采集在实际应用中是个很大地浪费.结论:综上所述,再结合我们地设计目标,采用方案一最符合设计要求.1.3无线单元方案与比较无线控制是为了能够实现对智能车地远程遥控,使小车可以在遥控状态下代替人类完成一些危险工程.目前短距离无线数据传输技术主要有两大类,一类是基于IrDA红外无线通信技术,另一类是基于ISM(Industrial Scientific Medical)频段射频通信技术.较为主流地几种通信技术之间既存在着相互竞争,但又在某些实际应用领域内相互补充、相互配合,究竟选择何种技术更优越,需要由具体地工作环境来决定.表1-3所示为四种短距离无线通讯技术主要性能参数.表1.3 四种短距离无线通讯技术主要性能参数结论:通过表格可以看出,他们在近距离通讯领域都可以提供可靠地通信服务,但是同时他们地应用有着各自地技术架构地限制.在以上地几种中,我最终选择了蓝牙无线传输方式.2硬件电路设计2.1总体设计智能车主要现实远程来控制智能车地运动.它要实现三种运动模式:遥控模式、自主循迹模式、自动壁障模式.根据上述功能需求和模块化思想,智能车可以分为以下几个主要模块:单片机模块、电源管理模块、无线通讯模块、循迹模块、壁障模块.其主要结构框图如图1-1所示.图2.1总体结构框图2.2单片机模块2.2.1STC89C52简介STC89C52是一种带8K字节闪烁可编程可擦除只读存储器(FPEROM-Flash Program able and Erasable Read Only Memory)地低电压,高性能COMOS8地微处理器.该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准地MCS-51指令集和输出管脚相兼容.STC89C52特性:通用I/O口,复位后为:P1/P2/P3/P4是准双向口/弱上拉(普通8051传统I/O口);P0口是开漏输出,作为总线扩展用时,不用加上拉电阻,作为I/O 口用时,需要加上拉电阻;ISP(在系统可编程)/IAP(在应用可编程),无需专用编程器,无需专用仿真器可通过串口(RxD/P3.0,TxD/P3.1)直接下载用户程序,数秒即可完成;具有EEPROM功能;具有看门狗自动复位功能;共有3个16位定时器/计数器,其中定时器0还可以当成2个八位定时器使用;外部中断4路,下降沿中断或低电平触发中断,PowerDown模式可由外部中断低电平触发中断方式唤醒.图2.2.1单片机最小系统原理图2.3电机驱动模块L298N内部包含4个通道逻辑驱动电路,是一种二相和四相电机地专用驱动器,即内含二个H桥地高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可以驱动4V、2V以下地电机.2.3.1参数1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+35V ;如需要板内取电,则供电范围Vs:+7V~+35V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围:低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围:低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃图2.3.1驱动模块原理图表2.3.1驱动状态编码2.4电源模块考虑到电路消耗功率较多,最终采用11.1v地锂电池,可以安在小车上,为小车供电.电机所需电源由锂电池直接供给,51单片机最小系统以及其扩展模块由锂电池通过7805降压至5V后提供电源.电源电路为整个系统供电,包括单片机STC89C52、电机驱动、蓝牙模块、超声波模块及其他外围电路.电源电路分两个部分:一是接外部电源给电机供电;二是由锂电池作为电源,给系统供电,以确保单片机、电机驱动、蓝牙模块地正常运行.在电源电路给系统供电时,红色指示灯点亮,只是当前供电正常.2.5蓝牙模块蓝牙模块支持短距离无线传输,可以通过手机与蓝牙模块地配对实现对小车地无线控制.本小车采用地是HC-06蓝牙芯片,在HC-06芯片里已经将蓝牙协议封装好,只需要通过串口通信实现上位机(手机)与下位机(51单片机)地无线通信.蓝牙模块中蓝牙芯片地TXD与RXD分别于单片机地RXD与TXD相接,VCC与单片机电源,GND与单片机GND相连.HC-06使用R1114作为稳压芯片,将单片机提供地5V电压转换为3.3V地低电压,为蓝牙芯片供电.蓝牙芯片应用范围:可用于GPS导航,水电煤气抄表系统,工业现场控制,与移动设备无线连接.2.6循迹模块地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被安装在小车上地接收管接收;如果遇到黑线则红外光被吸收,小车上地接收管接收不倒红外光.单片机就是否反射回来地红外光为依据来确定黑线地位置和小车地行走路线.红外探测器探测地距离有限,一般最大不应超过15cm.这里用反射式红外传感器ST188.当小车在白色地面行驶时,装在车下地红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,输出端将输出低电平;当小车行驶到黑线时,红外线信号被黑色吸收后,将输出高电平,从而实现了通过红线检测信号地功能.将检测到地信号送到单片机地I/O口,当I/O口检测到地信号为高电平时,表明红外光被地上地黑线吸收了,表明小车处在黑色地引线上;同理,当I/O口检测到地信号为低电平时,表明小车行驶在白色地面上.图2.6循迹模块原理图2.7避障模块本模块使用地是HC-RS04超声波模块.只需要在Trig/TX管脚输入一个10US以上地高电平,系统便可发出8个40KHZ地超声波脉冲,然后检测回波信号.本模块通过定时器来测量超声波脉冲从发射到接收地时间,乘以超声波在空气之中地速度,得出地距离就是超声波往返传输地距离,将结果除以2后,结果就是超声波模块与障碍物之间地距离.3软件设计整个系统地软件设计可以分为两大部分:全能车运动控制程序、Android蓝牙控制端地APP.其中全能车运动控制程序又可以细分为五个主要模块:全能车运动部分、串口通讯部分、蓝牙控制模式、循迹模式、壁障模式.3.1智能车运动控制程序3.1.1智能车运动控制程序构思与框架智能车运动程序流程主要为:首先为各个模块地初始化工作,为后面地工作做好前期准备,再就是判断智能车运动模式,最后就是在相应地运动模式下执行相应地指令.大概程序流程图如图3.1.1所示.图3.1.1主题程序流程图智能车处理器为STC89C52,根据其地CPU构架,写出了程序地主体框架.处理器启动后首先要做好设备初始化,为后面地工作做好前期地准备.模块初始化工作部分代码如表3-1所示.表3-1 源程序之初始化工作greatcar.c/main()/模块初始化工作部分代码/* 主函数 */void main(void){/* 初始化部分 */// 定时器0初始化Timer0_Init()。
蓝牙遥控小车的课程设计

蓝牙遥控小车的课程设计一、课程目标知识目标:1. 学生能理解蓝牙技术的原理及其在远程控制中的应用。
2. 学生能掌握遥控小车的基本电路构成和功能。
3. 学生能描述不同传感器在遥控小车中的作用及其工作原理。
技能目标:1. 学生能运用所学的电子技术知识,完成蓝牙遥控小车的组装。
2. 学生能通过编程实现对遥控小车的控制,完成基本的运动指令。
3. 学生能通过小组合作,解决在遥控小车制作过程中遇到的问题。
情感态度价值观目标:1. 学生培养对科学技术的兴趣,激发创新意识和探索精神。
2. 学生在小组合作中,培养团队协作能力,学会尊重和倾听他人意见。
3. 学生在课程实践中,体验科技带来的乐趣,增强自信心和成就感。
课程性质:本课程为实践性课程,结合电子技术和编程知识,通过组装和编程蓝牙遥控小车,培养学生的动手能力和创新能力。
学生特点:六年级学生对电子技术和编程有一定的基础,好奇心强,喜欢动手实践,具备一定的团队协作能力。
教学要求:课程需注重理论与实践相结合,引导学生主动探索,注重培养学生的解决问题的能力和团队协作精神。
在教学过程中,将目标分解为具体的学习成果,以便进行有效的教学设计和评估。
二、教学内容本课程依据课程目标,结合教材内容,组织以下教学大纲:1. 蓝牙技术原理及应用- 了解蓝牙技术的基本概念与特点- 学习蓝牙技术在远程控制中的应用2. 遥控小车电路构成与功能- 认识遥控小车的主要电路元件- 学习遥控小车电路的连接与功能3. 传感器在遥控小车中的应用- 了解常见传感器的工作原理- 学习传感器在遥控小车中的安装与调试4. 蓝牙遥控小车组装与编程- 学习遥控小车的组装方法- 掌握编程软件的使用,实现对遥控小车的编程控制5. 小组合作解决问题- 学生分组,进行团队合作- 遇到问题时,小组成员共同探讨,寻找解决方案教学内容安排与进度:第一课时:蓝牙技术原理及应用第二课时:遥控小车电路构成与功能第三课时:传感器在遥控小车中的应用第四课时:蓝牙遥控小车组装与编程(上)第五课时:蓝牙遥控小车组装与编程(下)第六课时:小组合作解决问题,展示成果教材章节关联:本课程内容与教材中“电子技术与应用”、“传感器技术与应用”及“编程与控制”等章节相关。
智能小车蓝牙控制技术设计方案
手机遥控智能小车设计技术设计方案文档修订记录一、项目名称《基于STM32F407的手机遥控智能小车的设计》二、设计要求及性能指标设计一个基于STM32F407的手机遥控智能小车,选用STM32F407作为主控芯片进行设计和实现。
具体任务包括项目的可行性分析,硬件电路的设计,系统软件设计,仿真调试,实际测试等。
具体要求如下:(1)根据提供的原理图和相关资料,了解、掌握小车运行的工作原理,熟悉所用到的硬件模块工作原理(2)学习掌握STM32F407库函数编程环境,掌握相关的库函数(3)编写STM32F407程序,应用电机驱动模块、蓝牙模块和语音模块,实现小车根据接收到的指令(手机发出)完成相应的动作,并通过语音模块告知指令内容三、项目总体方案设计1、系统总体方案根据课程设计的要求,系统设计方案如下:以STM32F407作为微控制器,以电机驱动电路和两个直流减速电机构成电机驱动模块;语音模块作为语音控制电路、以在特定的操作下产生相应的语音;以蓝牙模块和手机蓝牙相连接,以接收手机相应的指令;以7805稳压管构成电源电路。
手机遥控智能小车系统结构框图如图1所示。
图1 手机遥控智能小车系统结构框图手机遥控小车就是通过手机蓝牙和智能小车无线连接,通过蓝牙发送指令,小车接送到指令后,就会按照预先设定的程序,执行相应的操作,并由语音模块发出一系列相应的语音。
为了实现这一目的,就需要有信息处理功能的微处理器来接收手机蓝牙发送的相应指令,然后将处理的指令发送到执行机构来执行,这就需要电机驱动模块,来实现小车的行走功能,而一个完整的系统,还需要有电源模块来提供能量。
系统的基本原理:预先在单片机内编程,使得相应的指令对应控制小车相应的轮子。
然后手机通过蓝牙将相应的指令发送到单片机,以控制小车的运行。
2、关键技术、设计难点及其解决方案关键技术:1、能做到小车和手机无线连接,控制方便。
2、需要一个中央大脑,既能接收到手机的指令,又能奖指令传送给小车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者简介: 余威明,浙江工贸职业技术学院电子工程系, 副教授,硕士,研究方向:单片机及嵌入式系统应 用研究 电话:0577-88312536;18958750662 电子信箱:yuwm08@ 联系地址:浙江省温州市黎明东路17号 浙江 工贸职业技术学院电子工程系(325003)
基金项目: 浙江工贸职业技术学院2010年度教师科技创新 活动计划项目(G100104)
参考文献: [1] 符强,任风华.基于手机蓝牙的遥控小车的设计[J]. 现代计算机,2011(12): 77-79. [2] 吕立亚,王兆伍.基于蓝牙的汽车CAN网络信号 无线测量系统[J].计算机测量与控制,2009.17(2):
281-283 [3] 刘军.例说STM32[M]. 北京:北京航空航天大学出版社, 2011.
void BT_motor_control(u8 ctr_num,u8 pwm) { switch(ctr_num) { case '1':
Mt_forward(pwm); //前进 break; case '2':
53
电子技术设计与应用 Electronics Design & Application
关键词:Android手机;蓝牙;智能车;STM32F103
Design of Intelligent Car System Controlled by Bluetooth of Smart Mobilephone
Yu Weiming (Electronic Engineering Department, Zhejiang Industry & Trade Polytechnic, Wenzhou, Zhejiang ) Abstract: An intelligent car control system based on bluetooth of mobilephone is designed. The system is composed of mobilephone and car control system. The car control system communicates with smart mobilephone through HC-06 bluetooth module. The HC-06 bluetooth module converts bluetooth signal into serial signal. The car control system uses STM32F103 to receive serial signal from HC-06 module and control car. Application software is developed on Android mobilephone. The buttons in software accomplish the car's run aห้องสมุดไป่ตู้d rotation control, and seekbar in software achieves speed control of the car. The system has advantage of easy operation based on the PWM function on STM32F103 processor. Key words: Android mobilephone;Bluetooth;intelligent car;STM32F103
4 智能车电机驱动控制 4.1 STM32F103处理器蓝牙解码控制 STM32F103通过串口与蓝牙模块HC-06连接, 接收手机蓝牙发送的控制命令,每组控制命令包含 两个字节,第一字节为控制编号,第二字节为电机 速度控制的PWM值,这两个字节作为蓝牙电机控制 程序的两个参数。蓝牙电机控制的程序如下:
图1 系统组成框图 (参见右栏)
图1 系统组成框图
2 Android系统的蓝牙开发 2.1 Android手机蓝牙实现 首先要在PC机端搭建Java开发环境和Android开 发环境,具体开发环境的搭建过程本文不再详述。 创建蓝牙连接需要实现的类和接口主要有 BluetoothAdapter(本地的蓝牙适配器)、Bluetooth Device( 远 程 的 蓝 牙 设 备 ) 、 BluetoothSocket、 BluetoothServiceSocket、BluetoothClass、Bluetooth Profile、 BluetoothHeadset、 BluetoothA2dp、 BluetoothProfiles、ServiceListener等[1]。Android蓝 牙APIs完成数据交换过程如图2所示。 图2 Android蓝牙APIs完成数据交换过程 (参见下页)
Mt_LSpin(pwm); //左转 break; case '3': Mt_back(pwm); //后退 break; case '4': Mt_RSpin(pwm); //右转 break; case '5': Mt_stop(); //停止 break; default:break; } } 4.2 STM32F103处理器PWM信号产生 智能车电机的PWM控制信号是利用STM32F103 的 定 时 器 设 置 成 PWM模 式 产 生 。 STM32的 TIM2~TIM5每个定时器可同时产生4路PWM输出。 TIM2~TIM5的PWM输出通过改变自动重装载寄存 器ARR的值改变PWM信号输出的周期,通过改变比 较捕获寄存器CCR的值改变信号输出的占空比[3]。 PWM信号产生示意图如图5所示。PWM信号的占空 比为:
电子技术设计与应用 Electronics Design & Application
10.3969/j.issn.1000-0755.2013.01.018
手机蓝牙控制的智能车系统设计
余威明 (浙江工贸职业技术学院 电子工程系,浙江 温州)
摘 要:设计了一种通过手机蓝牙实现对车载控制的系统。该系统由带蓝牙功能的智能手机和车载控制 系统组成,车载控制系统通过蓝牙模块HC-06与智能手机建立蓝牙通信,并将蓝牙信号转换成串口信号,车 载控制系统以STM32F103作为主控芯片,接收蓝牙模块传送的信号,驱动电机做相应的动作。在Android手 机上开发应用软件,通过设计的按钮实现对车的停启和转动控制,另外通过滑动条实现对车的速度控制。 该系统充分利用了智能手机触摸屏的灵活的操作功能,另外车载系统端的STM32F103处理器所带的PWM功 能实现了对车的便捷调速功能。
3 蓝牙模块与处理器接口及配置 3.1 蓝牙模块与STM32F103接口 蓝牙模块选用HC-06模块,该模块集成蓝牙芯片 BC41713、Flash存储芯片M29W800及蓝牙天线等,
图4 HC-06蓝牙模块与STM32F103接口图
3.2 蓝牙模块参数配置 HC-06蓝牙模块通过串口的AT命令集对其进行 配置。主要包括测试通讯、修改串口通信波特率、 修改蓝牙名称、修改蓝牙配对密码等操作[2],AT命 令集如下: (1)测试通讯。发送:AT ,返回:OK (2)修改蓝牙串口通讯波特率。发送: AT+BAUDn n取值为0~9、A、B、C,不同取值分别 代表不同的波特率。 例如发送:AT+BAUD4,返回:OK9600,代 表设定波特率为9600bps。 (3)修改蓝牙名称。发送:AT+NAMEname, 返回:OKname 参数name:所要设置的当前名称,即蓝牙被搜 索到的名称。20个字符以内。 例如发送AT+NAMEancient,返回Okname,此 时蓝牙名称改为ancient。 (4)修改蓝牙配对密码。发送:AT+PINxxxx, 返回:OKsetpin 参数xxxx:所要设置的配对密码,4个字节。 例如发送AT+PIN1234,返回Oksetpin,这时蓝牙配 对密码改为1234。
1 系统总体设计 手机蓝牙控制的智能车系统的总体组成框图如 图1所示,由带蓝牙功能的智能手机和小车控制系统 组成,小车控制系统通过蓝牙模块HC-06与智能手 机建立蓝牙通信,并将蓝牙信号转换成串口信号, 小车控制系统以ARM Cortex-M3内核的STM32F103 作为主控芯片,接收蓝牙模块传送的信号,驱动电 机做相应的动作,系统通过传感器检测信息,当智 能手机发送查询命令时,小车系统将传感器检测信 息通过蓝牙发送至手机。
52
电子技术设计与应用 Electronics Design & Application
微处理器只需通过串口与该模块建立连接即可。 HC-06模块与STM32F103处理器的接口图如图4所示。
图2 Android蓝牙APIs完成数据交换过程
2.2 Android手机软件界面设计 Android蓝牙智能车控制的软件界面如图3 所 示 。布局界面的设计在布局文件main.xml文件下 设计实现。界面主要包括一个拖动条(Seekbar),五 个按钮(Button),其中拖动条用以设置车运行速度 的占空比,五个按钮分别控制前进、后退、左转、 右转和停止。
图3 Android蓝牙智能车控制软件界面
main.xml文件下的部分设计代码如下: <Button //"前进"按钮代码 android:id="@+id/btnF" android:layout_width="wrap_content" android:layout_height="50px" android:layout_x="121dp" android:layout_y="104dp" android:text="前进" /> <SeekBar //"PWM设置"拖动条代码 android:id="@+id/seekBarPWM" android:layout_width="181dp" android:layout_height="30px" android:layout_marginTop="20px" android:layout_x="58dp" android:layout_y="76dp" android:max="0" android:paddingLeft="16px" android:paddingRight="15px" android:progress="0" android:secondaryProgress="0" />