电液伺服系统同步控制研究
港口登船桥升降平台液压同步系统的研究
[1 ]
2012 年第 8 期
液压与气动
45
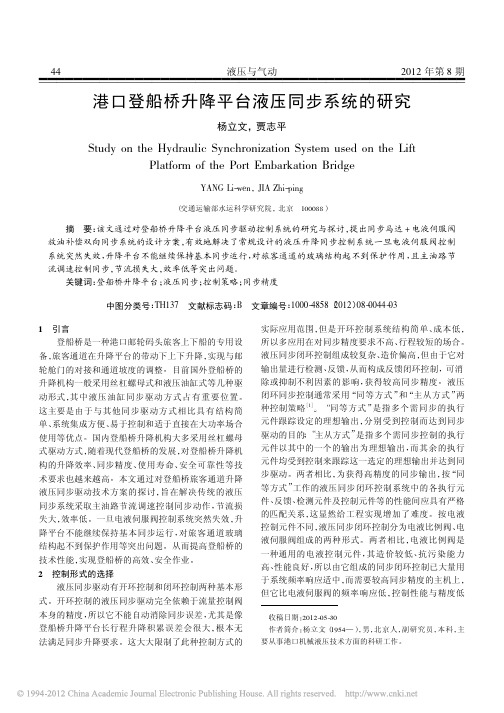
于电液伺服控制。根据登船桥旅客通道两侧为玻璃结 以及液压同步闭环控制系统的技术 构升降的特殊性, 特点, 本文提出了同步马达 + 电液伺服阀放油补偿同 步系统设计方案, 其响应速度快、 抗负载刚度大、 同步 精度高、 控制方便、 可靠性高、 结构简单, 且易于实现计 。 算机控制 3 系统的工作原理 登船桥旅客通道升降平台同步马达 + 电液伺服阀 放油补偿双向同步系统的工作原理如图 1 所示。 止因自重下滑时的超速运行。理论上可实现四缸同步 但实际中由于同步马达和油缸存在制造误差 , 其 运动, 容积效率、 摩擦阻力存在差异, 管路系统及控制元件的 泄漏、 负载不同等因素的影响, 必然导致四缸存在同步 误差。为了消除 4 个油缸在升降过程的同步误差, 回 。 路中设置了同步控制系统 该系统由放油补偿伺服阀 5、 位移传感器 9 、 位移控制模块 10 、 放大器 11 等组成, 回路的显著特点是可实现双向同步精确控制 , 同步控 制精度可达 5 mm 以内。 同步控制原理: 平台上升过程中同步的实现, 系统 始终将运行速度最低的液压缸作为主动缸 , 控制器将 其 运行速度最低的主动缸的位移信号作为标准信号 , 它从动缸的位移信号与之相比较。 用 PLC 作为整个 控制系统的核心, 信号由 PLC 运算处理。 电控器将其 控制阀的流量, 从 输入电压转换为伺服阀的控制电流 , 而控制缸的工作速度。通过各缸的光栅线位移传感器 其输出值为电压 V i , 各缸电压 测出各缸的即时位移, 存在差值反映了四缸伸出长度的不一致 , 将其作为反 馈电路输入, 经放大作为系统负反馈叠加至系统输入 , 端 从而控制从其它速度较快的三个油缸中放出油量 的大小, 即时修正位移, 达到四缸的同步控制目的。平 台下降过程中同步的实现与上升原理相同 。由于伺服
矫直机电液伺服系统的PSO二自由度内模同步控制

要 :对矫 直机 液 压 系统 多缸 同步 伺 服 控 制 方 法 进 行 了 研 究 ,提 出 了对 系 统 采 用 P I D N N辨 识 ,
~ ~ 一 ~ 一 一 一 一 一 一 一 . ~ 藿 一 ~ 一 ~ 一
D h 出 洲 h 一 m 己 吝
B A I L i n , H U A N G Q i n g — X U e , Z H A N G H u a — j u . , Y U E G u a n g
( He a v y Me c h a n i c a l E n g i n e e r i n g Re s e a r c h Ce n t e r o f E d u c a t i o n De p a r t me n t ,
越来越高 ,导致 工艺 过 于复 杂 ,最 终 质量 由矫 直
机完 成 。全 液 压矫 直 机 具 有 节 约 能 源 ,少 投 入 ,
元控制等 。这些算 法 调 整参 数 过 多 ,并 且 只是 一
自由度控 制 ,只 能在系 统 的跟 随性 和鲁 棒性 及 抗
多产 等多种优点 ,使 它越来 越受 到钢厂 的青睐 。
・
5 6・
重 型 机 械
2 0 1 3 NO . 6
矫直机 电液伺服系统 的 P S O二 自由度 内模 同步控制
柏 林 ,黄 庆 学 ,张 华 君 ,岳 光
太原
( 太原 科 技 大 学 重 型 机 械 教 育 部 T程 研 究 中 心 ,山 西
0 3 0 0 2 4 )
协
摘
A 就 可 以独 立调 整 系统 的 目标 跟 随特 性 和 干 扰 抑制 特性 。 因此 ,采用本 文提 出 的二 自由度控 制 方 法可 以使 系 统 同时 具 有 良好 的 目标 值 跟 随 特 性 、干扰 抑制 特性 和鲁棒 特性 。 1 . 2 P I D N N 系统辨识
基于自抗扰和反馈控制的电液位置同步系统
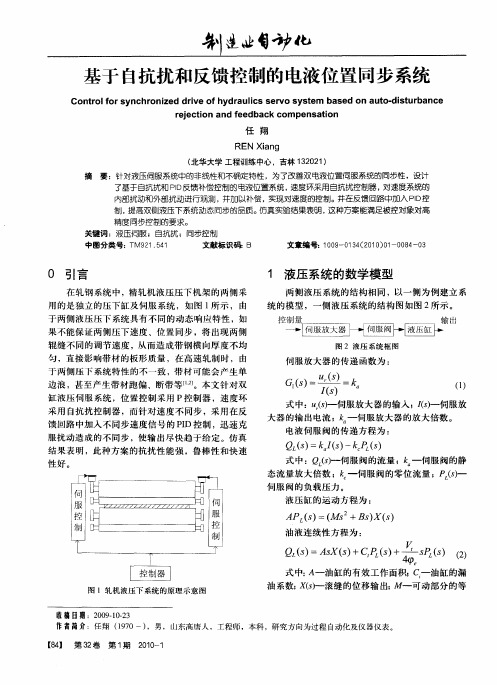
1 液压 系统的数学模 型
两 侧 液压 系统 的结构 相 同 ,以一 侧为例 建立 系
统 的模型 ,一侧 液压 系统 的结 构 图如 图 2所示 。
果 不能保 证两 侧压下 速度 、位 置 同步 ,将 出现两 侧
了基 于自抗扰和 PD I反馈补偿控制的电液位置系统 , 速度环采用 自抗扰控制器 , 对速度系统的 内部扰动和外部扰动进行观测 ,并加以补偿 ,实现对速度 的控 制。并在反馈回路中加入 PD控 I 制 , 高双侧液压下系统动态 同步的品质。仿真实验结果表 明 , 提 这种方案能满足被控对象对高
() 3
差 反馈 ”设计 出理 想 的控 制器 。在非 线性 状 态误差
G ) =
= i V 2 t
—
kn ks
反 馈控 制 器 中 ,由于扩张 状 态观 测器 能 实时观 测 未
伺服 放大器 的传 递 函数 为 :
边 液压伺 服 系统 ,位置 控制 采用 P控 制器 ,速 度环 采 用 自抗扰 控制 器 ,而针 对速 度不 同步 ,采 用在 反 馈 回路 中加 入不 同步 速度信 号 的 PD控 制 ,迅速 克 I
精度 同步控制的要求。 关键 词 :液 压伺服 ;自抗扰 ;同步控制 中图分类号: M9 1 5 1 T 2 .4 文献标识码: B 文章编号: 0 - 14 2 1 )l 0 8 — 3 1 9 0 ( 0 o o - 04 0 0 3
0 引言
在轧钢 系统 中,精 轧机 液压压 下机 架 的两 侧采
辊 缝不 同的调 节速度 ,从而 造成带 钢 横 向厚 度不 均
神经网络PID控制

基于神经网络PID控制算法在多缸电液伺服系统同步控制中的仿真研究丁曙光,刘勇合肥工业大学,合肥,230009摘要:本文介绍了神经网络控制原理,提出了神经网络PID算法,通过选定三层神经网络作为调节函数,经过Simulink仿真确定了神经网络PID控制器的参数,设计了神经网络PID控制器。
推导出多缸液压同步控制系统在各种工况下的传递函数,并把该控制器应用到多缸液压同步控制系统中。
经过仿真研究表明该控制器控制效果良好,能满足多缸液压同步的控制要求。
关键词:多缸同步;PID算法;仿真;神经网络Study on the simulation and appllication of hydraulic servo system of straihtening machine based onImmune Neural network PID control alorithmDING Shu-guang, GUI Gui-sheng,ZHAI HuaHefei University of Technology, Hefei 23009Abstract:The principle of immune feedback and immune-neural network PID algorithm was respectively.An immune-neural network PID controller was designed by which an adaline neural network was selected as antibody stay function and parameters of the immune-neural network PID controller were determined by simulation.The transfer function of the hydraulic servo system of crankshaft straightenin on were introduced in different working conditions.The immune-neural network PID controller was applied to hydraulic system of crankshaft straightenin.The simulation and equipment were done,and results show that its control effectiveness is better and can meet the needs of he hydraulic servo-system of crankshaft straightening hydraulic press.Key words:straightening machine; Immune control arithmetic; simulation;neural network0引言精密校直液压机(精校机)液压伺服系统是精校机的执行环节,高精度液压位置伺服控制是精校机的关键技术之一,它保证了液压伺服控制系统的控制精度、稳定性和快速性,是完成校直工艺的必要条件。
高频响电液伺服阀与比例阀在机器人控制中的应用研究

高频响电液伺服阀与比例阀在机器人控制中的应用研究摘要:机器人技术在自动化领域中发挥着越来越重要的作用。
高频响电液伺服阀和比例阀是机器人控制中的关键元件,它们能够实现精确且快速的运动控制。
本文将研究并探讨高频响电液伺服阀与比例阀在机器人控制中的应用,包括其原理、优势以及在不同领域中的具体应用案例。
1. 引言随着科技的发展,机器人技术逐渐成为各个行业中提升生产效率和质量的重要工具。
机器人控制系统中的高频响电液伺服阀和比例阀起着重要作用,能够实现精确、高速的运动控制。
本文将对这两种元件的原理进行研究,并探讨它们在机器人控制中的应用案例。
2. 高频响电液伺服阀原理高频响电液伺服阀是一种通过电流信号控制液压流量的元件。
其原理是通过电压信号的输入,驱动电磁铁开关阀芯,从而控制液压流量的大小。
高频响电液伺服阀具有响应速度快、工作精度高等优点,在机器人控制中扮演重要角色。
3. 高频响电液伺服阀在机器人控制中的应用3.1 机械臂运动控制在机器人的机械臂运动控制中,精细的运动调节是十分关键的。
高频响电液伺服阀能够快速响应和实现高精度的控制,从而使机械臂的运动更加准确和稳定。
3.2 机器人协作在多台机器人协作的场景中,高频响电液伺服阀可以实现机器人之间的精确同步控制。
例如,当一个工作任务需要多台机器人同时进行配合时,高频响电液伺服阀能够确保多台机器人动作的一致性和准确性。
4. 比例阀原理比例阀是一种通过改变控制信号的电流或电压大小来调节阀口开度的元件。
其原理是根据输入信号的大小,改变阀芯的开度,从而控制流体的流量。
比例阀具有调节范围广、工作精度高的优点,在机器人控制中应用广泛。
5. 比例阀在机器人控制中的应用5.1 工作环境控制在一些特殊的工作环境中,机器人需要根据外界环境的变化来调节自身的动作。
比例阀可以根据传感器信号的变化,实时调节机器人的动作,从而适应不同的工作环境。
5.2 工装夹持力控制在某些工装夹持任务中,精确的夹持力是非常重要的。
双缸同步提升电液系统建模和控制
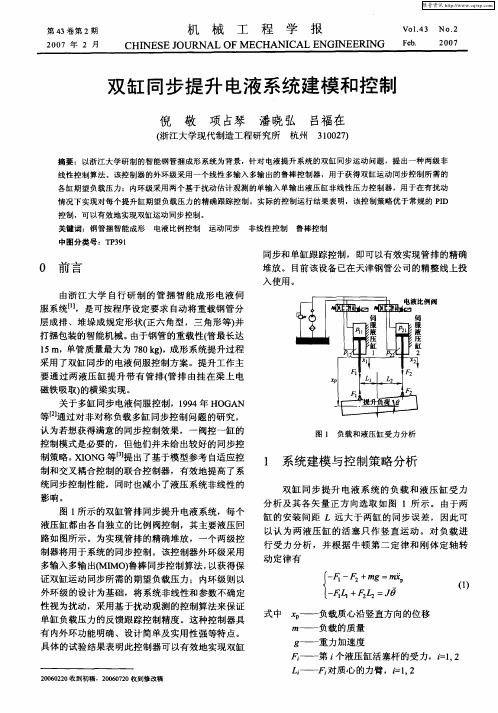
图 1 示 的双缸 管排 同步提 升 电液 系统 ,每个 所 液压 缸都 由各 自独立 的 比例 阀控 制 ,其 主要 液压 回
路如 图所 示 。为实现 管排 的精确 堆 放 ,一个 两级控
制器将 用 于系统 的同步控 制 。该控 制器外 环 级采用
f●● -
oXo —— 液压缸 的稳 态负 载压 力 , 6 ]
— —
f — — 第 i个 液 压 缸 的 无 杆 腔和 有 杆 腔 面 l , 恐
积 ,i 12 = .
液压缸 的期 望 负载力
V = 1 F 2 p [ p ]
而—— 第 f 液压 缸沿 竖直 方 向的位移 个 m — — 第 i 液压 缸 的活塞杆 质量 ,i 12 f 个 = .
中 图 分类 号 :T 3 1 P 9
电液 比例控制
运动 同步
非线性控制
鲁棒控制
0 前 言
由浙 江 大 学 自行 研 制 的管 捆 智 能成 形 电 液 伺 服 系统 【,是可按 程序 设 定要 求 自动将 重 载钢 管分 J J
同步 和单 缸跟 踪控制 ,即可 以有 效实现 管 排 的精 确 堆放 。 目前 该 设备 已在 天津钢 管 公司 的精 整线 上投
式中
‰—— 负载 质心 沿 竖直方 向的位移
— —
负载 的质 量
g ——重力加速度 第i 个液压 缸 活塞杆 的 受力 ,i 1 2 = ,
— —
厶—— 对质 心 的力臂 ,卢l2 ,
20 0 2 到初稿 ,20 0 2 到修 改稿 06 20收 06 70收
维普资讯
入使 用 。
基于智能算法的多缸同步控制系统研究
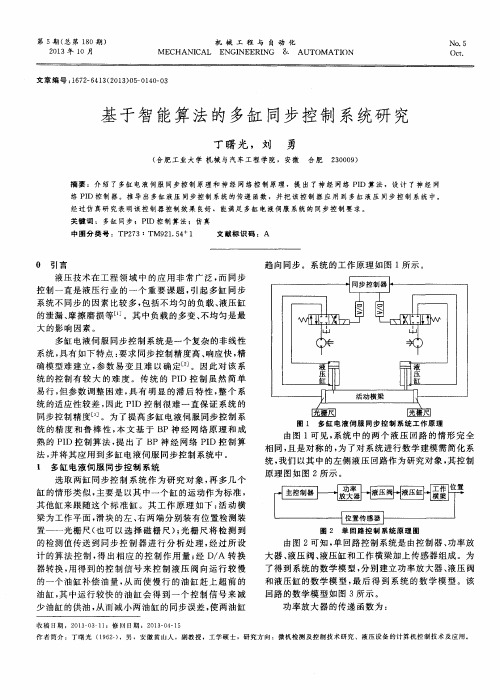
选取 两缸 同步控 制 系统 作 为研 究 对象 , 再 多 几 个
缸 的情形 类似 , 主要 是 以其 中一个 缸 的运动作 为标准 , 其他 缸来 跟 随这个 标 准 缸 。其 工 作 原理 如 下 : 活 动 横
梁 为工作 平 面 , 滑块 的左 、 右 两端 分别装 有位 置检测 装
r E
L — — — — — — 垡 重 堡 壁 堡r _ — — — — — — — 一
图 2 单 回 光 栅尺 ( 也 可 以选 择 磁栅 尺 ) ; 光 栅尺 将 检 测 到 的 检测值 传送 到 同步 控 制器 进 行 分 析处 理 , 经 过 所设 计 的算法 控 制 , 得 出相 应 的控 制作 用 量 ; 经D / A 转换 器 转换 , 用 得 到 的控 制 信 号 来控 制 液压 阀向运 行 较 慢 的 一个油 缸补偿 油 量 , 从 而 使慢 行 的油 缸赶 上 超 前 的
第 5期 ( 总第 1 8 0期 ) 2 0 1 3年 l O月
机 械 工 程 与 自 动 化 ME CH ANI CAL ENGI NEERI NG & AUTOM ATI ON
N0. 5 Oc t .
文章 编 号 : 1 6 7 2 — 6 4 1 3 ( 2 0 1 3 ) 0 5 — 0 1 4 0 — 0 3
0 引 言
趋 向同步 。系统 的工 作原 理 如图 1所示 。
液压 技术 在工 程 领域 中 的应 用 非 常广 泛 , 而 同 步 控制 一直 是液 压行 业 的一 个 重 要 课题 , 引起 多 缸 同 步 系统 不 同步 的因素 比较 多 , 包 括不 均匀 的负载 、 液压缸 的泄 漏 、 摩 擦磨 损等 ] 。其 中负载 的多变 、 不 均匀 是最 大 的影 响因素 。 多缸 电液伺 服 同步 控制 系统 是一个 复杂 的非线性 系统 , 具有 如 下特点 : 要 求 同步控制 精度 高 、 响应 快 , 精 确模 型难 建立 , 参数 易 变 且 难 以 确 定[ 2 ] 。因此 对 该 系 统 的控制 有 较 大 的难 度 。传 统 的 P I D 控 制 虽 然 简单 易行 , 但参 数 调整 困难 , 具有 明显 的滞后 特 性 , 整 个 系 统 的适应 性较 差 , 因此 P I D控制 很 难 一直 保证 系 统 的 同步控制 精度c 3 ] 。为 了提 高 多缸 电液 伺 服同步控 制 系
双缸电液位置伺服同步控制系统的智能控制

第 l 期 1
西
安
交
通
大
学 学
报
V o. 5 N O 1 14 .1
NO . 2 1 V O1
2 1 年 1 月 01 1
J OURNAL OF XIAN I JAOTONG UNI VERSTY I
双 缸 电液 位 置 伺 服 同步 控 制 系统 的 智 能控 制
DE io ,S W e bn ,GUO n a g ,L N Ta HANG An NG Ba U n i Qiy n I o ,Z
( . c o l f c a i l n i e r g i n J o o gUnv ri , n 7 0 4 , h n ; 1 S h o o Me h nc gn e i ,X i t n ie s y Xi 1 0 9 C ia aE n a a t a
2 Th e o d Ari ey En ie rngI siut . eS c n tl r gn e i n tt e,xia 1 0 5,Chn ) l n7 0 2 ia
Ab ta t Ai ig a h e u rm e t ft eh g r cso n a tr s o s n ee to h d a l sr c : m n tt er q ie n so h ih p e iin a d f s ep n ei lcr — y r u i c p sto e v y c r ncc n r ls se t o b ec l d r ,p o o t n l n e r t n dfe e — o iin s r o s n h o i o to y tm wi d u l yi e s r p ri a— tg ai - i r n h n o i o f ta t r t e1a nn o to ta e y wa mp o e o d sg n mp e e tt e c n r 1s se il e ai e r i g c n r lsr t g se ly d t e in a d i lm n h o to y tm i v wh r wo co e —o pa dt —e e o to r d p e om a et et lcr y r ui o i e et -l s d- o n wo lv l n r l l — c we ea o t dt k h woee toh d a l p s- — c — to e v y tms ta k e c t e n n u et ed n m i s n h o ia in o h o b ec l — in s r o s se r c a h o h ra d e s r h y a c v c r nz to ft ed u l yi n d r .Th o i o ro ewe n t yi d r n o s se o t u in l sfd b c i h es ep st n e r rb t e woc l e si t y t m u p tsg a i n wa e a k whl t e e
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
两个 系 统共用 一 个 液压 泵 站 , 站 采 用 恒压 变 量 泵
随着 液压技 术在 工 程 领 域 中 的应 用 1 扩 大 , 3益 大 型设 备负 载能力 增加 或 因布局 的关 系需要 多个 执行元 件 同时驱 动一个 工作 部 件 , 因此 同 步控 制 就 显 得越 来 越重要 了。但 由于每 一个 液压 系 统 的 泄 漏 、 控制 元 件 间 的性 能差异 、 执行元 件 间负载 的差 异 、 各 系统各 组成 部分 的制造误 差等 因素 的影 响 … , 造 成 多执 行 机 构 将 的同步误 差 , 果不 有 效 地加 以控 制 并 克 服这 种 同步 如 误差 , 系统将不 能正 常工 作 。 本文 以北京 市科 委 支 持 项 目为背 景 , 以北 京 交 通 大学 液压伺 服控 制实验 室 夹持 同步控 制试 验平 台 的阀 控非 对称液 压缸 为研 究 对 象 , 夹持 同步 控 制 进 行试 对
( 聊城大学 汽车与交通工程学院 ,山东 聊城
2 20 ) 50 0
摘
要 : 文 以电液伺服 系统 的 常用执行 机 构 阀控 非对 称缸 为研 究对 象 , 同步对顶伺 服 系统进 行分析 该 对
和 试验研 究 , 建立 同步控 制 系统位 置扰动 型 力 学模 型 , 出位 置 闭环 一力跟 随控 制 策略 , 过 试验 实现 亍对 提 通
图 1 同步控制实验平台系统结构图
从事 自动控制 与液压控 制方 面的科研 和教学工作。
2
液压 与气动
21 0 0年第 6期
假设 以右边 的施 力 系 统 为 研究 对 象 , 边 的位 置 左 系 统为受 力对象 。得 到施力 机构 的力 方程
力 值小 于设定 值 时为位 置 控 制 , 于 设定 值 时 再切 换 大 到力 闭环控制 , 至加载 稳定 。 同时为 了设 备安 全 , 直 根 据 力传感 器量 程设 计位 置 保 护 闭环 , 以避 免 意 外产 生 两 缸对顶 失控 的情况 。
用 V sa C++ . 写 。 i l u 6 0编 3 系统建 模
如 果受 力对象 是 一 个 位 置 系统 , 它运 动 与 否 主要
由本身决定 , 施力系统仅仅起着加载作用。这种施力
系 统称 为位 置扰动 型施 力 系统 l 。图 2是对 顶 同步系 2 J 统 的原理 图 , 图中可 以看 出 , 系统 I 从 子 为一 个 位置 系 统 。当采 用位 置闭 环. 跟 随 同步控 制 策略 时 , 系统 力 子 I为施力 系统 。可 以看 出这 是一个 标 准 的位 置 扰动 型 I
O3 _ O2 . 0. 1 0 01 . O. 2 _- 03
— 一
其中, K 的零位值可分别写成 K和 。
/\ /\ _ \
5 0 1 0 5 0 0 02 0 0 0 3 0 0 0 01 0 2 0 5 03 0 5 0
:
』√ ’叠 ; c古 零 阀 d 重
T + a 曲 Ky=Ky +F t 其 中, 为弹性系数 , m为加载对象的折算质量。
液压 缸 的力 方程
F =A pL
给定一正弦位置信号 , 控制液压缸 I 做位置闭环 , 同时控制液压缸 I做力闭环 , I 调节控制参数 , 确保两
缸 可 以夹 持住试 件 , 画 出 同步位 置运 动 曲线 和对 顶 并
施力 系统 。
夹 持 同步控 制 实验 平 台 为 两 个 阀控 非 对 称 缸 系
统, 系统 结构 框 图如 图 1 示 。 所
伺
图 2 外 力 扰 动 型 施 力 系统
收稿 日期 :0 00 -3 2 1 - 2 3 作 者简介 : 顾凯 ( 93 ) 男 , 18 一 , 山东聊 城人 , 助教 , 士 , 硕 主要
21 00年第 6期
液压与 气动
顾
凯, 李长春 , 周
欣
S u y o y c r nz t n c n rlo lcr — y r ui e v y tm t d n s n h o iai o t fee to h d a l s ro s se o o c
GU i I Ch ng c n,ZHOU n Ka ,L a —hu Xi
力 曲线 。
其中, A为活塞有 效 面积 。 液压 缸 的负 载流 量方程
Q.t+ C 杏 p
其中, c 为总泄漏系数 ,。 为弹性模数。
伺服 阀 的负 载流量 方程
Q L=K x—Kp x pL
当正弦位置信号频率为 05H 时, . z 得到两缸位置 跟踪 曲线 和对 顶 力 曲线 , 图 3 图 4所 示 ; 中在 零 如 、 其 值波动的位置曲线为两缸位置同步误差 曲线。
试件 的 同步 夹持 , 并提 出模 糊 PD 自适 应控 制 , 高 了控制精 度 。 I 提 关键 词 : 阀控非 对称缸 ; 同步控 制 ; 力跟 随控 制 中图分 类号 :H17 文献标 识 码 : 文章编 号 :0 04 5 ( 0 0 0 -0 10 T 3 B 10 -8 8 2 1 )6 0 -3 0
验研究 o 2 系统描述
泵, 供油压力为 5M a 同时有冷却器和蓄能器。两缸 P, 均装有位移传感器 , 右缸装有力传感器。
系统 数字 控制 器 主要 由研 华 工 控 机 (P 60 、 IC 1 ) 研 华 数 据采集 卡 ( C P L一86 、 1 ) 调理 电路 组 成 。控制 软 件
=
时间/ s
施
叠阀
—
图 3 05Hz 置 同 步 曲线 . 位
0 35 04 .5
TI /c ' " W
,
零 重叠 阀
Байду номын сангаас
之j 迥 霸 }
R
.
_ _5 o5
Kp =
=
.
O6 .5 07 .5 0 5 0 1 0 5 O2 O 2 O 00 5 0 0 0 0 0 01 O O O 5 O3 O3 O 4 o