计算分子进化第四章
人教版教学教案《遗传与进化》知识汇总
《遗传与进化》经典知识汇总第一章:生物进化的证据1.1 教学目标了解生物进化的概念掌握生物进化的证据:化石证据、比较解剖学证据、胚胎学证据理解生物进化的原因:自然选择、遗传变异、基因流、基因漂变1.2 教学内容生物进化的定义与意义化石证据:化石的形成与分布、化石在地层中的顺序、化石的种类与特征比较解剖学证据:同源器官、同功器官、痕迹器官胚胎学证据:胚胎发育过程、胚胎形态比较1.3 教学活动观察化石标本,探讨化石的形成与分布规律分析比较解剖学证据,通过图片或实物展示同源器官、同功器官、痕迹器官观察胚胎发育过程,探讨胚胎形态比较的证据第二章:遗传与变异2.1 教学目标理解遗传与变异的概念掌握遗传物质的传递规律:孟德尔遗传、染色体遗传、分子遗传了解基因突变、基因重组、染色体变异等遗传变异形式2.2 教学内容遗传与变异的基本概念孟德尔遗传:基因分离定律、基因自由组合定律染色体遗传:性染色体遗传、染色体数目变异分子遗传:DNA复制、基因突变、基因重组2.3 教学活动通过实例讲解遗传与变异的概念,让学生参与讨论分析孟德尔遗传实验,探讨基因分离定律与基因自由组合定律的原理与应用观察染色体标本,了解性染色体遗传与染色体数目变异的特征第三章:自然选择与生物进化3.1 教学目标理解自然选择的概念与机制掌握自然选择的主要内容:过度繁殖、生存斗争、遗传与变异、适者生存了解自然选择在生物进化中的作用与意义3.2 教学内容自然选择的基本概念与机制过度繁殖:生物种群的增长规律、环境承载力生存斗争:生物之间的竞争、生物与环境的斗争适者生存:适应性进化、适应性辐射3.3 教学活动通过实例讲解自然选择的概念与机制,让学生参与讨论分析自然选择的主要内容,探讨过度繁殖、生存斗争、遗传与变异在生物进化中的作用观察生物标本或图片,了解适者生存的实例与适应性辐射的特征第四章:生物进化的分子基础4.1 教学目标理解生物进化的分子基础掌握生物进化与分子进化的关系:DNA序列比较、蛋白质结构比较、基因家族进化了解生物进化与基因表达调控的关系4.2 教学内容生物进化的分子基础:DNA、RNA、蛋白质DNA序列比较:序列相似性、遗传距离、分子进化树蛋白质结构比较:结构域、活性位点、功能进化基因家族进化:基因家族的定义、基因家族的进化规律4.3 教学活动分析DNA序列比较的实例,探讨遗传距离与分子进化树的关系观察蛋白质结构比较的实例,了解结构域、活性位点在进化中的作用讲解基因家族进化的规律,探讨基因家族在生物进化中的意义第五章:生物进化与生物多样性5.1 教学目标理解生物进化与生物多样性的关系掌握生物多样性的三个层次:遗传多样性、物种多样性、生态系统多样性了解生物进化与生物多样性的保护与利用5.2 教学内容生物进化与生物多样性:进化历程、生物多样性形成的原因与机制遗传多样性:等位基因频率、基因流、基因漂变物种多样性:物种形成、物种分化、物种灭绝生态系统多样性:生态系统结构、生态系统功能、生态系统稳定性5.3 教学活动分析生物进化与生物多样性的关系,让学生参与讨论观察遗传多样性、物种多样性、生态系统多样性的实例,了解其形成的原因与机制探讨生物进化与生物多样性的保护与利用,提出相应的措施与策略第六章:生物进化与化石记录6.1 教学目标理解化石记录对生物进化的启示掌握化石形成的原理和过程了解不同地层中化石的分布规律6.2 教学内容化石的形成与分类:化石的类型、化石的形成过程化石在地层中的分布:地层学原理、化石分布的模式化石记录与生物进化:生物多样性的变迁、生物进化趋势6.3 教学活动参观化石博物馆或观察化石标本,加深对化石形成过程的理解分析化石分布图,讨论化石在不同地层中的分布规律研究特定化石种类的演化历程,探讨化石记录对生物进化的证据意义第七章:生物进化与比较解剖学7.1 教学目标理解比较解剖学在生物进化研究中的应用掌握同源器官和同功器官的概念了解比较解剖学对生物进化理论的贡献7.2 教学内容同源器官:定义、分布、进化解释同功器官:定义、分布、进化解释比较解剖学与生物进化:生物形态比较、进化趋势分析7.3 教学活动分析比较解剖学图表,识别同源器官和同功器官的例子讨论比较解剖学证据如何支持生物进化理论利用比较解剖学数据,构建生物形态演化的图表或模型第八章:生物进化与遗传学8.1 教学目标理解遗传学原理在生物进化研究中的重要性掌握遗传变异的类型和遗传漂变的后果了解分子遗传学在生物进化研究中的应用8.2 教学内容遗传变异:突变、重组、基因流遗传漂变:定义、类型、生态遗传后果分子遗传学:DNA序列比较、遗传距离计算、分子进化树构建8.3 教学活动分析遗传变异的案例,探讨其对生物进化的影响通过模拟遗传漂变过程,让学生理解遗传多样性的变化利用分子遗传学数据,构建简单的分子进化树,讨论生物的演化关系第九章:生物进化与生态学9.1 教学目标理解生态学在生物进化过程中的作用掌握生物间相互作用对进化影响的概念了解生态系统多样性与生物进化的关系9.2 教学内容生物间相互作用:竞争、共生、寄生、捕食生态位:生态位的概念、生态位分化与特化生态系统与生物进化:生态系统服务、生态系统稳定性、生物地理学9.3 教学活动通过实验或案例分析,探讨生物间相互作用对进化的影响观察生态位分化实例,讨论生态位如何促进物种多样性研究生态系统多样性的案例,了解生态系统与生物进化的相互关系第十章:生物进化与生物地理学10.1 教学目标理解生物地理学在生物进化研究中的重要性掌握生物地理分布的类型和模式了解生物地理学对生物进化假说的贡献10.2 教学内容生物地理分布:纬度、经度、海拔的影响生物地理学假说:板块构造、气候变化的影响生物地理学与生物进化:生物入侵、生物扩散、物种形成10.3 教学活动分析生物地理分布图,识别不同物种的分布模式讨论生物地理学假说如何解释物种的分布与演化通过案例研究,了解生物地理学如何影响物种的形成与灭绝重点解析本文教案《遗传与进化》经典知识汇总共分为十个章节,涵盖了生物进化的证据、遗传与变异、自然选择与生物进化、生物进化的分子基础、生物进化与生物多样性、生物进化与化石记录、生物进化与比较解剖学、生物进化与遗传学、生物进化与生态学、生物进化与生物地理学等经典知识点。
生物信息学-第四章-多序列比对与分子进化分析

Clustal使用方法
Clustal:目前被最广泛应用的 MSA 方法
可在线分析
可在本地计算机运行 序列输入、输出格式
Input FASTA
NBRF/PIR EMBL/SWISSPROT ALN GCG/MSF GCG9/RSF GDE
>sequence 1 ATTGCAGTTCGCA … … >sequence 2 ATAGCACATCGCA… … >sequence 3 ATGCCACTCCGCC… …
10 3 2 5
C B
2
D
outgroup 外群、外围支
系统发育树构建步骤
多序列比对(自动比对、手工校正)
最大简约法 (maximum parsimony, MP) 距离法 选择建树方法(替代模型) (distance) 最大似然法 (maximum likelihood, ML) 贝叶斯法 (Bayesian inference) UPGMA
多序列比对的应用: •系统发育分析(phylogenetic analysis) •结构预测(structure prediction) •序列基序鉴定(sequence motif identification) •功能预测(function prediction) ClustalW/ClustalX:一种全局的多序列 比对程序,可以用来绘制亲缘树,分析进化 关系。 MEGA5——分子进化遗传分析软件
比对参数设置
两两比对参数
多序列比对参数
点击进行多序列比对
比对结果 “*”、“:”、“.” 和空格依次代表改位点的序列一致性由高到低
第四步:比对完成,选择结果文件的保存格式
可进一步对排列好的序列进行修饰(1)
第四章 分子进化
Information-content
氨基酸的比对
1 2 3 4 5 6 7 8 9 10 8 10 CHSACKSCACTYSIPAKCFCTDIND-FCYEPC CHSACKSCACTFSIPAECFCGDIDD-FCYKPC CHSACKSCICTLSIPAQCVCDDIDD-FCYEPC CHSACSSCVCTFSIPAQCVCVDMKD-FCYAPC CHSACKSCICALSEPAQCFCVDTTD-FCYKSC CHSACKSCICALSYPAQCFCVDITD-FCYEPC CHSACKSCLCTLSIPPQCHCYDITD-FCYPSC CHSACKTCLCTKSIPPQCHCADITN-FCYPKC CHSACKSCLCTRSIPPQCRCTDITN-FCYPKC CPAACNKCVCTRSIPPQCRCTDRTQGRCPLT CHSACKSCLCTRSIPPQCHCADITN-FCYPKC CPAACNKCVCTRSIPPQCRCTDRTQGRCPLT 红色:一致性 粉色和绿色:相似性
Nm: 雄性个体数,
Nf: 雌性个体数
•
种群大小的波动
应考虑所研究的物种的历史
麋鹿(将圈养在英国的麋鹿重新引回国)
朱缳(由仅存的少数几只重新扩大种群)
• 实际上参加生育儿女的个体数
瓶颈效应
蜜蜂的例子
麋鹿 (Elaphurus davidianus ) —— ―四不象”
医用物理学答案第04

2 × 10 −3 = 8.31
4 4 2 5 π1.4 2 × 1.1 × 10 5 π1.5 × 1.2 × 10 3 −3 283 293
4-9 某些恒星的温度达到 108 K的数量级,在这样的温度下原子已不存在, 只有质子存在,试求:质子的平均动能是多少?质子的方均根速率是多少?
dN m 2 − 0 x 2 = f ( v x )dv x = 4 π 0 e 3×2 kT v x dv x N 2 πkT
所以, v
2
3
m v
2
∫ =
=
∞
0
v 2 dN N
=
kT . m0
v2 =
kT = m0
RT M
∫ v=
∞
0
vdN N
πkT 2m0
4-5 求粒子数在v p 与 1.01v p 之间和 2v p 到 2.01v p 之间的气体分子数各占总数 的百分之几?(以 dv = 0.01v p 计算) 解:由题意知: dv=0.01v p ;处于v p 到v p +0.01v p 的概率为:
混合后,气体的温度变为 T,总内能为:
3 5 3 5T E = ν 1 RT + ν 2 RT = ( + 1 )ν 1 RT 2 2 2 2T2
由于混合前后总内能相等,即 E 0 =E,所以有
8 3 5T ν 1 RT1 = ( + 1 )ν 1 RT 2 2 2T2
所以有
T=
4-11
T2 设 地 面 大 气 是 等 温 的 , 温 度 为 t=5.0 ℃ , 海 面 上 的 气 压 为
∫
v0
第四章 分子进化分析

1.2.3 最大似然法(ML)
最大似然法(maximum likelihood,ML) ML对 系统发育问题进行了彻底搜查。ML期望能够 搜寻出一种进化模型(包括对进化树本身进 行搜索),使得这个模型所能产生的数据与 观察到的数据最相似.
进化模型可能只是简单地假定所有核苷酸(或 AA)之间相互转变的概率相同,程序会把所有 可能的核苷酸轮流置于进化树的内部节点上, 并且计算每个这样的序列产生实际数据的可能 性(比如两个姊妹群都有核苷酸A,那么如果 假定原先的核苷酸C得到现在的A的可能性比起 假定原先就是A的可能性要小得多),所有可 能性的几率被加总,产生一个特定位点的似然 值,然后这个数据集的所有比对位点的似然值 的加和就是整个进化树的似然值。
2.选择适当的分析方法 如你分析的是DNA数据,可以选择简约法 (DNAPARS),似然法(DNAML, DNAMLK), 距离法等(DNADIST)。。。 3.进行分析 选择好程序后,执行,读入分析数据,选 择适当的参数,进行分析,结果自动保存为 outfile,outtree。
Outfile是一个记录文件,记录了分析的 过程和结果,可以直接用文本编辑器(如写 字板)打开。 Outtree是分析结果的树文件,可以用 phylip提供的绘树程序打开查看,也可以用 其他的程序来打开,如treeview。
paralogs
orthologs
1.1.2 类
群
祖先类群(ancestral group):如果一个类群(物种)至少有一 个子裔群,这个原始的类群就称为祖先类群 单系类群(monophyletic group)包含一个祖先类群所有子裔 的群组称为单系类群,其成员间存在共同祖先关系 并系类群(paraphyletic group)和复系类群(polyphyletic group):不满足单系类群要求,各成员间又具有共同祖先特征 的群组称为并系类群;各成员不具有共同衍生特征也不具有共 同祖先特征,只具有同型特征的分类群组称为复系类群 内类群(ingroup):一项研究所涉及的某一特定类群可称为内类 群
4.2基本概念-03-树状还是网状

《生物信息学》第四章:分子进化与系统发生基本概念:“树状”还是“网状”越来越多的细菌和动植物的基因组测序显示,基因并不是简单遗传给生命树上的个别枝条,它们还在物种之间以不同的进化路径转换,其结果是一个杂乱无章的“生命网”。
这里要区分“树”和“网”的概念。
在计算机科学领域,树的定义规定,树上从一个点到另一个点的路径只有唯一的一条。
而当两点之间的路径个数≥2的时候,就形成了网。
编织生命网的要素之一就是水平基因转移。
水平基因转移,是指生物将遗传物质传递给其他细胞而非其子代细胞的过程。
早在1993 年,就有生物学家提出细菌的基因排序不是树状的,而是网状的。
1999年,美国《科学》杂志发表言论说:“生命进化树并不是真实存在于自然界中的,而是人类用来规划自然界的一个理论。
”但是,有研究者运用更多的研究捍卫达尔文的观点,认为所谓网状的进化论是理想化、不切实际的想法。
“树状”和“网状”的辩论在2006年正式拉开帷幕。
位于德国海德堡的欧洲分子生物实验室(EMBL)派出由皮尔·博克领导的工作组,研究了来自细菌、古细菌以及真核细胞的191个基因组。
他们发现,其中31组基因没有任何迹象表明曾经被水平转移过,和尚未完善的“树”相近。
但是,来自德国杜塞尔多夫大学的达冈和马汀教授认为,31组的结果不能够证明什么,这个数字太小。
2008年,达冈和他的团队研究了181个基因组,发现80%的基因组存在水平基因转移,即网状树。
此外,杂交也可能是物种进化的有力驱动。
来自伦敦大学的生物进化学家詹姆斯·马里特说:“杂交是非常普遍的现象,有1/10的动物都是杂交的。
”2008年,美国得克萨斯大学的科学家在包括家鼠、野鼠和非洲爪蛙在内的8种动物的基因组中发现了一种奇特的DNA。
这是鸡、大象和人类所没有的DNA,这说明它是一些动物通过异种交配形成的。
几年前,科学家也曾在牛体内发现蛇的DNA。
此外,鱼类、昆虫和植物中也都曾发现水平基因转移现象。
第四章、序列的同源比较及分子系统学和分子进化分析1

第二条序列头尾颠倒
CTAGTCGAGGCAATCT
CTAGTCGAGGCAATCT
GAACAGCTTCGTTAGT
CTTGTCGAAGCAATCA
第二条序列替换成互补碱基
2020/1/10
16
二、序列相似性比较基础知识
2、编辑距离
2020/1/10
17
二、序列相似性比较基础知识
3、打分矩阵
在打分矩阵中,详细地列出各种字符替换的得分,从而 使得计算序列之间的相似度更为合理。在比较蛋白质时,我 们可以用打分矩阵来增强序列比对的敏感性。打分矩阵是序 列比较的基础,选择不同的打分矩阵将得到不同的比较结果, 而了解打分矩阵的理论依据将有助于在实际应用中选择合适 的打分矩阵。
19
二、序列相似性比较基础知识
3、打分矩阵
(1)、核酸打分矩阵
• 等价矩阵 等价矩阵是最简单的一种打分矩阵,其中,相同核苷酸匹配的得分为“1”,而不同核 苷酸的替换得分为“0”(没有得分)。
• BLAST矩阵 BLAST 是目前最流行的核酸序列比较程序,这也是一个非常简单的矩阵,如果被比 的两个核苷酸相同,则得分为“+5”,反之得分为“-4”。
第四章
序列的同源比较及分子系统学 和分子进化分析
2020/1/10
1
主要内容
第一节、序列相似性比较 第二节、系统发育分析
2020/1/10
2
第一节、序列相似性比较
一、序列相似性比较简介 二、序列相似性比较基础知识 三、两个序列相似性比较方法 四、两个序列相似性比较软件与操作 五、多个序列相似性比较软件与操作
2020/1/10
21
二、序列相似性比较基础知识
3、打分矩阵
序列的同源比较及分子系统学和分子进化分析教学课件

特点
本教学课件内容全面、结构清晰,注重 实践操作和案例分析,有助于学生深入 理解和掌握相关知识。
VS
优势
通过同源比较、分子系统学和分子进化分 析三个方面的内容,使学生对分子生物学 领域有一个全面的了解,同时提高学生的 实验操作能力和解决问题的能力。
感谢您的观看
THANKS
分子系统学与分子进化分析的关联
亲缘关系研究
分子系统学是研究生物亲缘关系和进化顺序的科学,通过比较不同物种或不同基因的分子特征,可以推断出它们 之间的亲缘关系和进化路径。
进化机制研究
分子进化分析是研究生物进化机制的科学,通过比较不同物种或不同基因的分子变异和进化速率,可以揭示生物 进化的内在规律和机制。
它基于氨基酸或核苷酸序列的相似性 比较,以评估物种间的亲缘关系和进 化历程。
序列同源比较的背景
随着生物技术的不断发展,研究人员 能够获得越来越多的基因和蛋白质序 列数据。
为了更好地理解这些数据和物种间的 关系,需要进行序列同源比较,以挖 掘更多有用的信息。
序列同源比较的意义
01
序列同源比较有助于研究物种的进化和亲缘关系。
药物研发
分子系统学研究结果可以用来寻找新的药物靶点,有助于开发出 更加有效的药物。
03
分子进化分析原理
分子进化的概念
分子进化的定义
分子进化是指生物大分子在进化过程中发生的适应性或非适应性 变化的过程。
分子进化的研究内容
主要研究生物大分子演化的规律和机制,包括DNA、蛋白质等分 子的演化过程、速度和方向等。
05
教学课件内容及安排
教学课件的主题和目标
主题
序列的同源比较、分子系统学和分子 进化分析
目标
八上生物第四单元知识点 八年级上生物第四章知识点

八上生物第四单元知识点八年级上生物第四章知识点1. 生物进化1.1 进化的概念进化是指生物在长时间内逐渐演变和发展的过程,包括物种的起源、多样性和变化。
1.2 进化的证据•古生物化石记录•生物地理分布•生物胚胎发育•分子生物学研究1.3 进化的原因•自然选择•突变和遗传变异•基因流动•遗传漂变2. 物种起源和多样性2.1 物种的定义和分类物种是指在自然界中能够进行基因交流并繁殖后代的一群相似个体。
生物按照形态、结构、生态和进化关系进行分类。
2.2 物种起源的理论•拉马克的个体进化论•达尔文的自然选择论2.3 生物多样性生物多样性指地球上各种生物的丰富性和多样性。
包括物种多样性、基因多样性和生态系统多样性。
3. 进化的基因机制3.1 遗传变异与进化•突变:遗传物质发生的突然的、不可逆的变化•基因重组:不同基因的组合产生新的遗传组合3.2 选择与进化•自然选择:适应环境的个体存活下来并繁殖后代•人工选择:人类有目的地选择特定的个体进行繁殖3.3 迁移与进化迁移是指生物个体在地理空间上的移动,可以导致基因的流动和生态系统的改变。
4. 生物进化的模式4.1 分支模式分支模式是指先进型物种从原始型物种进化而来,形成进化树状分支结构。
4.2 环式模式环式模式是指多个物种相互影响和相互进化,形成进化闭环,互相影响和制约。
4.3 平行模式平行模式是指不同物种在相似的环境条件下发展出类似的进化特征和适应性。
4.4 收敛模式收敛模式是指不同物种在不同环境条件下发展出类似的进化特征和适应性。
5. 人类的进化与演化5.1 人类的起源人类起源于非洲,并逐渐迁徙到全球各地。
5.2 人类进化的证据•古人类化石记录•DNA分析•灵长类动物的研究5.3 人类的演化特点•直立行走•大脑的发育•社会行为的发展以上是八上生物第四单元知识点的概述和总结。
生物进化是生物学中非常重要的一个概念,通过了解进化的原因、证据和机制,可以更好地理解生物的起源和多样性。
第四章 分子进化分析

颠换比,能用下式估计:
ˆ ˆ P ˆ /Q R
核苷酸替代数的估计常常建立在以下假设基础上, 即每个序列的核苷酸频率处于平衡态,且此频率
不随时间而变化。当每个序列的核苷酸频率处于
平衡时,我们期望表5-1中的
P11 P12 、 P21 P22 、 Q11 Q12 、 Q21 Q22 、 Q31 Q32
2 2
(C)Equal-input 模型
(D)Tamura 模型 β θ -α θ β θ
2
β θ α θ -β θ
1 1
α θ β θ β θ --
1 1 1
2
2
2
1
[例4.1] 人与猕猴的细胞色素b基因间的核苷酸替代数 动物线粒体DNA中的细胞色素b基因是高度保守的, 因此常被用于研究亲缘关系较远的动物的进化关系。 下表表示出了人与猕猴的细胞色素b基因的10种不 同类型核苷酸对的数目,并分别以密码子第1、2和
值较大,而当亲缘关系较近的物种比较时(如人 和马),值较小。这说明随着两个物种的分歧时 间增大,氨基酸的替代数也将增大,但并不严格 与分歧时间成比例。
图4-2 p距离和泊松校正(PC)距离随分歧时间变化的关系
2. 泊松校正(PC) 距离 p与t的变化呈现非线性关系的原因之一是当多个氨
基酸替代出现在同一位点时,nd偏离实际氨基酸的
当r遵循分布时,就有可能估计出平均每个位点的
氨基酸替代数。为此,让我们考虑在时间t时两个 序列间某一位点上的氨基酸相同的概率,按公式
(4.4)计算。然后,对所有位点的q求均值,为
q
0
a qf (r )dr a 2rt
a
dG a[(1 p)1/ a 1]
人类是怎样进化的》每章主要内容

人类是怎样进化的》每章主要内容(完整版)人类是怎样进化的第一章:起源和进化理论本章主要内容是人类起源的不同理论和证据。
首先,介绍达尔文的进化理论,包括适者生存和自然选择的概念。
其次,探讨美索不达米亚和中国的创世神话,以及它们与科学进化理论的对比。
最后,介绍现代的进化理论,如中性理论和分子进化,以及基因和大脑的进化。
第二章:人类的遗传与演化本章主要内容是人类的遗传与演化过程。
首先,讲述基因的重要性,如DNA和染色体结构的作用。
其次,介绍基因突变和遗传变异的原因和影响。
然后,探讨人类的近亲繁殖和遗传性疾病。
最后,讨论人类与古人类的遗传关系,如尼安德特人和丹尼索瓦人。
第三章:人类进化的重要阶段本章主要内容是人类进化的重要阶段和里程碑。
首先,介绍人类和原始人类的区别。
其次,探讨直立人的出现和早期的工具使用。
然后,讨论旧石器时代和新石器时代的变化,如火的使用和农业革命。
最后,介绍现代人类的兴起,如语言和社会结构的演化。
第四章:文化和环境对进化的影响本章主要内容是文化和环境对人类进化的影响。
首先,讨论文化传承和社会俗的重要性。
其次,介绍环境对基因表达和进化速度的影响。
然后,探讨进化心理学和文化进化理论,以解释人类行为和文化的起源。
最后,讨论现代环境对人类进化的挑战,如气候变化和技术发展。
第五章:人类未来的进化方向本章主要内容是人类未来可能的进化方向。
首先,讨论现代社会对人类进化的影响,如医学技术和社会结构的改变。
其次,介绍遗传工程和人工智能对人类进化的潜在影响。
然后,探讨人类的进化适应能力和进化道德问题。
最后,讨论人类可能面临的进化挑战和机会。
结语本文档通过不同章节的介绍和讨论,全面探讨了人类的进化过程和影响因素。
人类进化的研究是一个复杂而有趣的领域,可以帮助我们更好地理解人类的本质和未来。
希望本文档能为读者提供一些有关人类进化的基本知识和思考方向。
八年级上生物第四章知识点

八年级上生物第四章知识点生物学是一门涉及生命体的科学,考察着万物生灵的诞生、繁殖、生长、死亡等生命过程。
八年级上,我们将深入学习生命的起源和基因的组成,了解到人类遗传和进化的奥秘,以及动植物生命周期的体验。
本章将详细介绍八年级上生物第四章的知识点,希望能够为同学们带来一些启发与帮助。
一、生命起源生命起源是生物学的起点,并且它一直是人类追求的问题。
据最新的科学研究,生命始于约37亿年前,生命的起源有几种假说:1.化学进化假说:生命起源于地球上最原始的化学环境。
在温度、压力和化学成分等多种因素的作用下,一些无机物质逐渐变成了生物大分子。
2.智能设计假说:生命是由一个不知名的生物体或者更高级的物种设计和制造的。
3.宇宙生命假说:生命是通过陨石或者流星落入地球,从而开始其进化过程,进而诞生出我们所知的生命形式。
二、基因组基因组是基因在细胞核或质体内整体的DNA序列,是细胞所具有的遗传物质总和。
基因组的结构有以下几种:1.原核基因组:原核生物的基因组比较简单,不包括多数真核生物所具备的核小体和染色体结构。
其中细菌、蓝藻等原核生物以循环的方式存在染色体。
2.真核基因组:真核生物比原核生物的基因组规模更大、结构更复杂。
三、基因遗传基因遗传是基于遗传物质DNA的继承模式。
在不同的基因型和表现型表现中,基因之间存在不同的关系,主要包括以下几种:1.显性基因:只要一个基因是显性的,表型就会显式地表现出来,与其他阻碍的基因或者基因型无关。
2.隐性基因:一个基因是隐性的,只有在两个基因是隐性时,表现型才会表现。
3.部分显性基因:一些基因在杂合状态下表现出不同于显性和隐性的表型。
四、基因突变基因突变指所有基因变异事件,包括正常的自然或者人为的变异,以及疾病和致突变因素引起的突变。
突变可以区分为以下几种:1.点突变:指一个碱基发生了突变,形成单个多态性。
2.插入/缺失突变:引起插入或缺失碱基对DNA的改变。
3.倒位突变:发生在染色体上,可以引起染色体的损失、重叠和缩短。
分子动力学方法

第四章 分子动力学方法§4.1 分子动力学方法第四章 分子动力学方法分子动力学(Molecular Dynamics,简称MD)是模拟大量粒子集合体系(固 体、气体、液体)中单个粒子的运动的一种手法,其关键的概念是运动,即要计 算粒子的位置、速度和取向随时间的演化。
分子动力学中的质点可以是原子、分 子、 或更大的粒子集合, 只有在研究分子束实验等情况下, 粒子才是真正的分子。
与“分子动力学”相类似的名词还有“晶格动力学” (研究固体中原子的振动)和 “分子力学” (分子结构的量子力学) ,而分子动力学限于模拟经典粒子的运动。
分子动力学简单 来说就是用数值方法求解经典力学中的 N 体问题。
自 Newton时代起, N 体问题就被认为是很重要的物理问题,解析求解或质点轨道 的混沌分析是数理力学中的关注点。
但时至今日,该问题重要性的原因已经进化 成, 将单粒子动力学与系统的集体状态相联系,人们试图通过考察单个粒子的运 动来解释大量粒子集合系统的行为。
例如,绕过一物体的流体是怎样产生湍流尾 迹的?蛋白质分子中的原子是怎样相互运动从而折叠成生命支撑形态的?流体 气旋怎样产生如木星上的大红斑那样的长寿旋涡的?溶液中的长链分子怎样自 组装成一些特殊结构?等等。
因此,分子动力学在凝聚态物理、材料科学、高分 子化学和分子生物学等许多研究领域都有广泛的应用。
§4.1 分子动力学方法4.1.1 基本概念4.1.1.1 分子动力学分子动力学现已成为分子尺度上模拟的典型方法之一。
它起源于上世纪50 年代,在70年代中开始受到广泛关注。
分子动力学源于自Newton时代以来的古 老概念, 即只要知道了系统组分的初始条件和相互作用力,整个系统的行为就可 以计算出来并可以预测。
该自然的决定性力学解释长期左右了科学界。
Laplace 于1814年曾写到: “Given for one instant an intelligence which could comprehend all the forces by which nature is animated and the respective situation of beings who compose it-an intelligence sufficiently vast to submit these data to analysis-it would embrace in the same formula the movements of the greatest bodies of the universe and those of the lightest atoms; for it, nothing would be uncertain and the future, as the past, would be present to its eyes” (现在的 分子动力学模拟中, Laplace的 “intelligence”由计算机实现, “respective situation”即为给定的一组初始条件, “same formula”为算法程序) 。
4.3系统发生树-01-系统发生树的样子
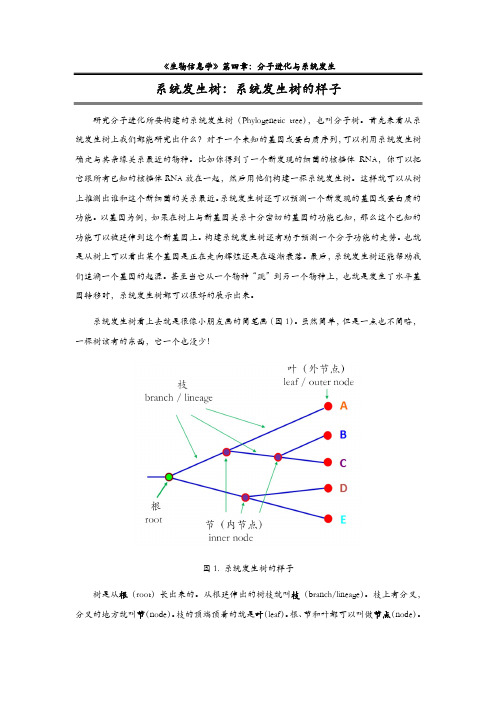
《生物信息学》第四章:分子进化与系统发生系统发生树:系统发生树的样子研究分子进化所要构建的系统发生树(Phylogenetic tree),也叫分子树。
首先来看从系统发生树上我们都能研究出什么?对于一个未知的基因或蛋白质序列,可以利用系统发生树确定与其亲缘关系最近的物种。
比如你得到了一个新发现的细菌的核糖体RNA,你可以把它跟所有已知的核糖体RNA放在一起,然后用他们构建一棵系统发生树。
这样就可以从树上推测出谁和这个新细菌的关系最近。
系统发生树还可以预测一个新发现的基因或蛋白质的功能。
以基因为例,如果在树上与新基因关系十分密切的基因的功能已知,那么这个已知的功能可以被延伸到这个新基因上。
构建系统发生树还有助于预测一个分子功能的走势。
也就是从树上可以看出某个基因是正在走向辉煌还是在逐渐衰落。
最后,系统发生树还能帮助我们追溯一个基因的起源。
甚至当它从一个物种“跳”到另一个物种上,也就是发生了水平基因转移时,系统发生树都可以很好的展示出来。
系统发生树看上去就是很像小朋友画的简笔画(图1)。
虽然简单,但是一点也不简略,一棵树该有的东西,它一个也没少!图1. 系统发生树的样子树是从根(root)长出来的。
从根延伸出的树枝就叫枝(branch/lineage)。
枝上有分叉,分叉的地方就叫节(node)。
枝的顶端顶着的就是叶(leaf)。
根、节和叶都可以叫做节点(node)。
但是叶后面不再有枝了,是最外面的节点,所以叫外节点(outer node)。
而节的前后都有枝,所以叫内节点(inner node)。
根是一切的起源,习惯上就叫根。
根和节都表示理论上曾经存在的祖先,叶子是现存的物种。
这一点很重要!比如我们要研究某个基因,于是搜集了很多物种的这个基因的序列,用它们构建了一棵系统发生树。
搜集到的物种都出现在叶子上,也就是外节点上,没有在内节点上的。
内节点上都是理论上曾经存在过的共同祖先,现在已经不存在了!此外,枝子的长短也是有意义的,我们后面再讲。
第四章 分子进化与系统发育分析
tRNA & Anticodon
每一个密码子,对应一 个tRNA;
tRNA通过Anticodon来 识别codon,联系 mRNA和氨基酸序列的 合成;
密码子的使用偏好:由 密码子对应的tRNA的进 化及丰度来决定。
碱基出现的频率
1. 假如:每个核苷酸位点上的替代是随机发生的, 则A,T,C,G出现的频率应该大致相等。 2. 实际情况:DNA受到自然选择的压力,各个位 点的碱基出现频率并不相等。 3. 需要解决的问题:
注意:反之未必 序列保守性 结构保守性
本章内容提要
第一节,密码子偏好及分析 第二节,氨基酸序列的进化演变
第三节,分子系统发育分析
第四节,分子系统发育分析软件介绍
第一节,密码子偏好及分析
密码子(codon): 在随机或者无自然选择的 情况下,各个密码子出现频率将大致相等;
密码子偏好:各个物种中,编码同一氨基酸 的不同同义密码子的频率非常不一致; 可能的原因:密码子对应的同功tRNA丰度 的不同 - Anticodon
外类群 外类群
archaea archaea
eukaryote eukaryote eukaryote eukaryote
大肠杆菌和酵母:部分基因的CAI
异源基因:在其他物种中的CAI
第二节,氨基酸序列的进化演变
分子进化的分析:基于氨基酸序列的分析 早于DNA序列 优势:氨基酸序列更为保守,对年代跨度 大的进化分析有帮助;数学模型较DNA远为 简单 p距离:p-distance 泊松校正,d距离
P-distance
A. 最大简约法 (Maximum Parsimony) B. 距离法 (distance-based methods) C. 最大似然性法 (Maximum Likelihood) D. 贝叶斯(Bayesian)推断
高中生物必修三第四章教案总结
高中生物必修三第四章教案总结第一节:遗传的基本规律遗传是生命活动中十分重要的一环,也是高中生物必修三中一个非常重要的内容。
第四章的第一节主要介绍了遗传的基本规律。
主要包括三大遗传学规律:孟德尔遗传学规律、染色体遗传学规律和分子遗传学规律。
其中,孟德尔遗传学规律讲述了基因遗传的规律,并且介绍了粒子说和分离定律,为后续的遗传的进一步理解打下了基础。
染色体遗传学规律则主要介绍了染色体的现象,让人们更好地理解遗传基因在染色体上的分布。
分子遗传学规律主要讲述了基因结构和表达,让人们对DNA序列有了更加深刻的认识。
第二节:基因的表达和调控第二节主要包括基因表达和基因调控两个内容。
基因表达讲述了基因的转录和翻译,从而使蛋白质正常合成的过程。
基因调控则是指在不同环境和条件下基因表达量的调控,从而实现生物体对外界环境的适应。
具体来说,基因表达包括DNA转录为mRNA的过程,然后mRNA进入细胞质,在核糖体的作用下进行翻译,并最终合成对应的蛋白质。
基因调控则分为转录前调控和转录后调控,其中转录前调控包括DNA甲基化和组蛋白修饰等,转录后调控则包括mRNA后期修饰、RNA干扰和核糖体选择等。
第三节:遗传变异和分子进化第三节主要介绍了遗传变异和分子进化两个方面。
遗传变异是指基因在传递和复制过程中所发生的变异现象,包括基因突变、基因重组和基因转位等。
分子进化则是指通过DNA等分子证据来揭示物种进化的过程。
具体来说,在遗传变异方面,我们需要了解常见变异类型和变异原因,以及变异对后代遗传的影响。
在分子进化方面,我们需要了解各种分子证据的原理,如DNA,RNA和蛋白质序列等,这些都可以用来研究物种间的演化关系。
总结高中生物必修三第四章主要涉及了遗传的基本规律、基因的表达和调控,以及遗传变异和分子进化等内容。
这些内容是遗传学和进化生物学中不可或缺的部分,也是我们了解生物的基本知识。
在教学中,我们可以采用多种教学手段来帮助学生理解和掌握这些知识,如举例、模拟实验等。
苏教版高中生物必修2第四章生物的进化第二节生物的多样性和适应性是进化的结果课件

1 |生物进化的证据越来越多 1.生物进化的古生物学证据 (1)化石:经过自然界的作用,保存在地层中的古生物遗体、遗物和它们的生活遗 迹。 (2)意义:为生物的进化历程提供了证据。科学家运用化石记录基本确定了生物 进化的历程。
2.生物进化的其他证据 (1)比较解剖学证据 ①研究的对象:同源器官。 ②同源器官:起源相同,结构和部位相似,而形态和功能不同的器官称为同源器 官。 ③对动物同源器官的研究结果是生物进化的证据之一。同源器官的存在表明具 有同源器官的生物是由共同的原始祖先进化而来的,只是在进化过程中,由于生 活环境的不同,同源器官逐渐出现了形态和结构的差异。 (2)比较胚胎学证据:对不同生物胚胎发育过程的研究揭示了不同生物是由同一 祖先进化而来的事实,亲缘关系相近的生物在胚胎发育中有相同的发育阶段。
2 |生物进化导致生物的)分歧进化(趋异进化):由一个原始物种经过漫长的地质年代,因适应不同的环境 而向不同的方向进化,逐渐形成新物种的方式。 (2)趋同进化:由于相似或相同的生活环境,一些不同种类的生物在自然选择下出 现形态结构向着同一方向进化的方式。 趋同进化现象说明不同种类的生物发生适应相似或相同环境的进化,是自然选择 的结果。 (3)协同进化(共同进化):不同物种之间、生物与无机环境之间,在相互影响中不断 进化和发展。 协同进化促进了多种类型的生物的出现,丰富了生物多样性。
2.生物多样性的层次及与生物进化的关系 (1)生物多样性各层次间的关系:遗传多样性是形成物种多样性和生态系统多样 性的基础,反过来物种多样性和生态系统多样性又影响遗传多样性,如图所示。
(2)生物的进化导致了生物物种的多样性。
(3)细胞生物学证据 ①在真核生物中,每个物种细胞内的染色体数量和每条染色体的形态结构都是恒 定的。 ②通过比较不同物种的染色体组型和核型,可以研究不同物种间的亲缘关系。 ③对细胞代谢等方面的研究发现,当今生物都具有共同特征。 (4)分子生物学证据 ①利用分子生物学技术对不同生物的生物大分子进行组成分析,或利用分子杂交 方法,来判断生物之间的亲缘关系和进化顺序。 ②分子生物学证据也说明,当今生物具有共同特征。例如,几乎所有生物都共用 一套遗传密码,遗传信息的传递都遵循中心法则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t6
t8 t3
8
t1
1:T
t2
t4
4:C
t5
2:C 3:A
图4.1 一个用来演示似然函数计算的五物种树。顶端 示出所观测的一个位点上的核苷酸,枝长 t1 t8 的测度 5:C 是每位点核苷酸置换的期望数。
3
观测数据为TCACC,祖先节点用数字0,6,7,8标出,0为树根。连 到节点i的分支长度用 ti 表示,定义为平均每个位点核苷酸置换的期 望数目。 模型中的参数包括枝长和转换/颠换比率 ,用集合表示 t1, t2 , t3 , t4 , t5 , t6 , t7 , t8 , 由于假定位点间独立进化,整个数据集的概率是数据在单个位点的 概率之积,对数似然率则等价于对序列中的所有位点求和
10
f ( x1 x2 x3 ) i pij (t0 t1 ) p jx1 (t1 ) p jx2 (t1 ) pix3 (t0 )
i j
j p jx1 (t1 ) p jx2 (t1 ) p jx3 (2t0 t1 )
j
(4.7)
t0
i
2t0 t1
j j
f ( X h ) x0 L0 ( x0 )
x0
0
(4.5)
x 是根的核苷酸为 x 的(先验)概率,由该模型下核苷酸平衡频率 0
给出。(具体可见书中 P105例) 修剪算法是一种主要的节省计算时间的方法。
8
4.2.3 时间可逆性、树根
分子系统发育分析中使用的大多数置换模型描述时间可逆马尔 可夫链。对于这类链,转换概率对任意i,j和t,满足 i pij (t ) j p ji (t ) 。 可逆性的一个重要结果是根可以沿着树任意移动而不影响似然率, Felsenstein(1981)称之为滑轮原理。例如,对公式(4.2)中的 x px x (t6 ) 置换 x px x (t6 ) ,注意
6 6 0
0
0 6
p
我们有
x6 x0
(t6 ) px0 x8 (t8 ) px6 x8 (t6 t8 )
f (X h ) [ x6 px6 x7 (t7 ) px6 x8 (t6 t8 ) px7T (t1 )
x6 x7 x8
px7 C (t2 ) px6 A (t3 ) px8C (t4 ) p x8C (t5 )]
2
4.2 树的似然计算
4.2.1 数据、模型、树及似然函数
已知s个已对位排列的同源序列,每个序列为n个核苷酸长,用 s×n阶矩阵X={x jh }表示,其中x jh 表示第j个序列中的第h个核苷酸. 令 X h 表示数据矩阵中的第h列,这里我们采用K80核苷酸置换 模型。下面我们用一个例子来解释似然率计算。如图
第四章 最大似然法
4.1 引言 4.2 树的似然计算 4.3 复杂模型下的似然计算 4.4 祖先状态重建 4.5 最大似然估计的数值算法 4.6 似然法的近似 4.7 模型选择与稳健性
1
4.1 引言
在本章中讨论一棵系统发育树上的多重序列似然计算。 系统发育分析中似然率的两种用途: 第一种,估计进化模型中的参数; 第二种,估计树拓扑结构,通过估计枝长和其他置换参数来实 现每棵树的对数似然率最大化,并将优化的对数似然率用做比较 不同树的树分值。
表4.1 离散置换率模型 1
p1
位点类别 概率 置换率
2
p2
3
p3
…… …… ……
ቤተ መጻሕፍቲ ባይዱ
K
pk
r1
r2
r3
rk
两个约束,频率之和为1, pk 1 。其次,平均置换率固定为1, 即 pk rk 1 ,使得枝长可以用平均每个位点的核苷酸置换期望数 目来度量。后一个约束对于避免使用过多的参数是必要的。 12
0
(4.12)
这里,参数 的集合包括 和枝长以及置换模型中的其他参数 (如 )。Yang(1993)、Gu等(1995)以及Kelly和Rice(1996)介绍了 连续置换率模型(如公式(4.12))下计算似然函数的一种算法。
15
位点置换率的贝斯估计
由许多序列组成的大型数据集使得我们可能估计每个位点的相 对置换率。在离散和连续置换率模型中,位点置换率都是从似然 函数中积分获得的随机变量。下面用位点数据给出的置换率条件 (后验)分布来估计置换率
h
f ( x1 x2 x3 r ; ) j p jx1 (t1r ) p jx2 (t1r ) p jx3 [(2t0 t1 )r ]
j
(4.9)
但该模型被认为K不应超过3或4。Yang(1995a)实现了表4.1的普 适模型。
13
一个特例是不可变位点模型,它假设两类位点:一类为不可 变位点类,其置换率为 r0 0 ;另一类具有一个恒定置换率 r1 。由于 平均置换率为1,有r1 1 (1 p0 ) ,这里的不可变位点p0 比例是模型中 仅有的参数。注意,在对位排列中,一个可变位点不能有 r0 0 的 置换率,因而一个位点的数据概率为
0
5
4.2.2 修剪算法
对祖先状态的所有组合求和很费力,在计算这类求和时,有一 种重要的技术很有用,它找出公因子且只对它们计算一次,这就 是嵌套法则或称Horner法则。对公式(4.2)应用嵌套法则意味着将 加号尽可能远地向右移,得
f (X h ) x0 px0 x6 (t6 ) px6 x7 (t7 ) px7T (t1 ) px7C (t2 )) px6 A (t3 ) x0 x7 x6 px0 x8 (t8 ) px8C (t4 ) px8C (t5 ) x8
p0 p1 f (x h r r1 ; ) f (x h ) p1 f (x h r r1; )
假如位点是恒定的 假如位点是可变的 (4.10)
14
4.3.1.2 伽马置换率模型
用一个连续分布去近似位点的可变置换率。最常用的分布是伽 马分布。伽马密度为
f (X h ) [ x0 px0 x6 (t6 ) px6 x7 (t7 ) px7T (t1 )
x0 x6 x7 x8
(4.2)
px7C (t2 ) px6 A (t3 ) px0 x8 (t8 ) px8C (t 4 ) px8C (t5 )]
方括号中的各项为顶点数据TCACC和祖先节点数据 x0 , x6 , x7 , x8 的概 率,等于树根(节点)具有 x0 的概率,它由K80模型下 x 1 4 时树 上8个枝的8个转换概率相乘得到。
r 1e r g (r; , ) ( )
(4.11)
具有均值α/β及方差 2 ,令α=β,使得均值为1。性状参数 与位点间置换率变异的大小有关。 如同在离散置换率模型中的一 样,我们不知道该位点的置换率,而不得不对置换率分布求平均
f (x h ) g (r ) f (x h r ; )dr
16
4.4祖先状态重建
4.4.1 概述 4.4.2经验和等级贝斯重建 4.4.2.1边界重建(marginal reconstruction) 我们计算一个祖先节点的形状状态的后验概率。图4.2中考 虑根节点0,其核苷酸为 x0 ,给定位点数据,节点0的后验概率为
x0 L0 ( x0 ) f ( x0 ) f (x h x0 ; ) f ( x0 x h ; ) f (x h ) x0 L0 ( x0 )
t1
t1
t1
x1
x2
(a)
x3
x1
x2
(b)
x3
图4.4 (a)在一个三物种有根树上,似然计算必须对两个祖先节点上的祖先状态 i和j求和。(b)通过将树根移到物种1和物种2的祖先并对新树根上状态j求和可以 完成相同的计算。
11
4.3 复杂模型下的似然计算
4.3.1 位点间可变置换率模型 在实际序列中置换率在位点间常常是可变的,而忽略位点间 的置换率变异可能对系统发育分析产生重要影响。 4.3.1.1 离散置换率模型 在这个模型中,假定位点中具有不同置换率的若干类(如K类). (见表4.1).
l log( L) log{ f (X h )}
h 1 n
(4.1)
ML方法通过对数似然率 l 最大化来估计 ,通常采用数值优化算法。 这里,我们考虑参数 给定时 l 的计算。
4
我们集中考虑一个位点。用 xi 表示祖先节点i的状态,标注下 标h,由于该位点的数据 (x h TCACC) 可由祖先核苷酸 x0 , x6 , x7 , x8 的任 意组合产生,计算 f (x h ) 就必须对已灭绝祖先的所有可能的核苷酸 组合求和
f (r x h ; ) f (r ) f (x h r ; ) f (x h )
(4.13)
参数θ可用其估计值代替(如最大似然估计),已知这是一种经验贝 斯方法。在连续置换率模型下,人们可用后验均值作为该位点置 换率的估计值(Yang and Wang,1995)。在离散置换率模型下,公 式(4.13)中的置换率r取K可能值中的一个,有 f (r ) pk。人们可以 计算后验均值或者用具有最高后验概率的置换率作为最佳估计值 (Yang,1994a)。
由于我们并不知道每个位点属于哪一类置换率,因而在任一 位点观测数据的概率是对位点类别的加权平均
f (x h ) pk f (x h r rk ; )
k
(4.8)
似然率还是用位点间概率的乘积来计算。 由置换率r给出的观测数据 x h 的条件概率 f (x r ; ) 只是单置换 率模型下的概率,用所有枝长乘以r。而具有K类置换率的可变置 换率模型就是单置换率模型计算K次。 考虑图4.4(b)中的树,我们有