巴克码多普勒容限带宽的扩展
巴克码多普勒容限带宽的扩展
巴克码多普勒容限带宽的扩展杨文华 宋力平 王其扬 (航天工业总公司八院804所 上海200082)文 摘 介绍和分析了多普勒容限带宽扩展的几种方法,提出用设计包络约束(EC)滤波器的方法设计巴克码的多普勒频移补偿滤波器,可以同时进行旁瓣抑制和多普勒容限带宽的扩展,并且使信噪比损失较小。
经计算机仿真证明有较好的结果。
主题词 巴克码 多普勒容限带宽 包络约束滤波器 多普勒频移补偿滤波器收稿日期:1997 05 29系上海市宇航学会会员。
0 引言相位编码信号有许多优点,但它有多普勒频移敏感性。
当雷达信号回波存在多普勒频移时,脉压后主瓣加宽,旁瓣增大,甚至起不到脉冲压缩的作用,这就限制了它的应用,因此多普勒容限带宽的扩展日益受到重视。
一方面,人们通过寻找新的码型来解决这个问题,如NLFM 码(Non Linear FM Sig nals)就是通过取样和量化非线性调频信号而来的,它具有低旁瓣特性和多普勒频移的不敏感性;另一方面,人们在雷达系统和旁瓣抑制滤波器上进行了研究。
文献[2]提出了采用非相干处理结构来降低多普勒频移的敏感性,文献[3]在非相干处理结构的基础上,在某一多普勒频率上采用不同的最佳准则设计多普勒频移补偿滤波器,得到了比较好的效果。
在实际应用中,也采用了多路匹配滤波器等各种各样的处理方法。
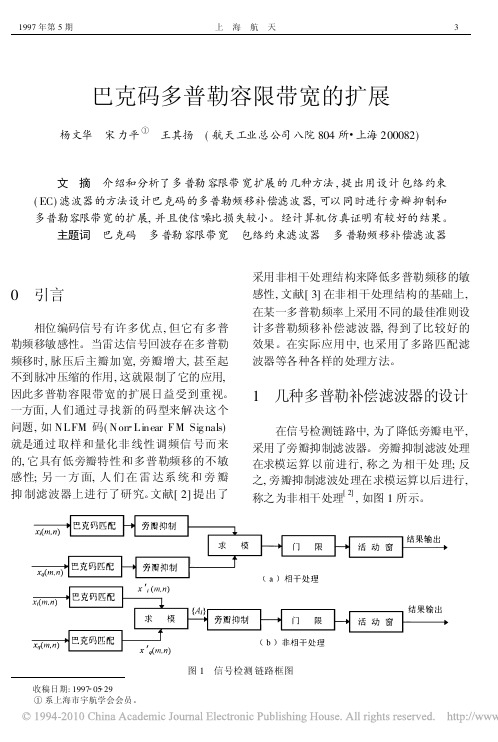
1 几种多普勒补偿滤波器的设计在信号检测链路中,为了降低旁瓣电平,采用了旁瓣抑制滤波器。
旁瓣抑制滤波处理在求模运算以前进行,称之为相干处理;反之,旁瓣抑制滤波处理在求模运算以后进行,称之为非相干处理[2],如图1所示。
图1 信号检测链路框图分析表明:采用非相干处理结构,可以降低多普勒频移的敏感性和扩展多普勒容限带宽[3]。
但是这样扩展是有限的:当目标高速飞行或旁瓣抑制滤波器应用于多普勒(PD)雷达时,非相干处理的多普勒容限带宽扩展已不能满足需要。
由于非相干处理结构的旁瓣抑制滤波器所考虑的只是多普勒频率的绝对值,其性能是关于零多普勒频率对称的,所以,就能以某一多普勒频率为中心频率,设计非相干处理结构的旁瓣抑制滤波器,得到较大的多普勒容限带宽。
EDA课程ROM扩展巴克码检测器

控制系统
用于检测控制系统的异 常情况,提高控制系统
的可靠性和稳定性。
医疗设备
用于检测医疗设备中的 异常情况,提高医疗设 备的安全性和可靠性。
优势与局限性
优势
ROM扩展巴克码检测器具有高可靠 性、高稳定性、高抗干扰能力等优点 ,能够有效地检测和纠正信号中的错 误,提高系统的性能和可靠性。
局限性
由于ROM扩展巴克码检测器的实现较 为复杂,且需要预先定义检测码,因 此在某些情况下可能无法适应快速变 化的环境和信号。
软件实现
软件算法设计
根据巴克码检测器的算法 需求,设计合理的软件算 法,包括编码、解码和检 测等算法。
编程语言选择
选择适合的编程语言,如 C/C或Verilog等,进行软 件算法的实现。
代码优化与调试
对实现的算法进行优化和 调试,确保软件的正确性 和性能。
测试与验证
测试环境搭建
搭建适合的测试环境,包括硬件测试平台和软件测试 平台。
ROM扩展巴克码检测器可根据不同的 应用场景和需求进行灵活配置,具有 广泛的应用前景。
该检测器具有较高的检测效率和准确 性,能够在较短时间内完成信号的解 码和纠错。
对未来研究的展望
01
深入研究其他类型的巴克码
除了ROM扩展巴克码检测器,还有其他类型的巴克码,如Reed-
Solomon码等。未来可以进一步研究这些巴克码的性能和应用。
高速化
随着信号传输速率的不断提高,ROM扩展巴克码检测器 的高速化将成为未来的发展方向,能够适应高速信号的检 测和纠正需求。
05
结论
总结课程收获
掌握ROM扩展巴克码检测器的原理
01
通过学习,我深入理解了ROM扩展巴克码检测器的工作原理,
巴克码自相关波形

巴克码自相关波形摘要:1.巴克码的概述2.巴克码的自相关波形3.巴克码自相关波形的应用正文:1.巴克码的概述巴克码是一种用于数据编码和解码的技术,它可以将数据以特定的波形进行传输。
巴克码是由美国的克劳德·香农(Claude Shannon)在1948 年提出的,其主要思想是通过编码将信息转化为特定的波形,然后通过解码将波形还原为原始信息。
巴克码具有抗干扰能力强、传输速率稳定等优点,被广泛应用于通信领域。
2.巴克码的自相关波形巴克码的自相关波形是指巴克码在时间上的分布特征。
具体来说,巴克码的自相关波形是指在一定时间内,巴克码的值与其自身或其他时间的值之间的相关性。
巴克码的自相关波形具有如下特点:(1)在时间上的局部相关性:巴克码的自相关波形在时间上呈现出局部相关性,即在一段时间内,巴克码的值与其自身的值或其他时间的值之间存在较强的相关性。
(2)自相关波形的零点:巴克码的自相关波形在某些点上具有零点,这些零点被称为自相关波形的零点。
自相关波形的零点可以用来判断巴克码的相位,从而在解码过程中起到关键作用。
3.巴克码自相关波形的应用巴克码自相关波形在通信领域具有广泛的应用,主要包括以下几个方面:(1)数据解码:在数据传输过程中,由于受到各种干扰,数据在接收端可能会发生畸变。
通过分析巴克码的自相关波形,可以判断数据传输过程中是否发生畸变,从而实现对数据的解码。
(2)信道均衡:在数据传输过程中,信号会受到信道特性的影响,如时延、衰减等。
通过分析巴克码的自相关波形,可以对信道进行均衡,从而提高信号传输的质量。
(3)误码检测与纠错:在数据传输过程中,信号可能会受到噪声等干扰,导致接收端出现误码。
通过分析巴克码的自相关波形,可以检测出误码并实现纠错,从而提高数据传输的可靠性。
二相编码雷达信号及常见问题处理

二相编码雷达信号及常见问题处理姬长华;张秀丽【摘要】二相编码信号是常用的脉压雷达信号,具有较强的似噪声性和良好的低截获概率特性.介绍了二相编码信号及几种较好的可用于脉冲雷达的信号形式,给出了二相编码应用时所遇到的主要问题及处理方法,提出了处理距离遮挡、距离旁瓣、多普勒敏感的新思路.【期刊名称】《现代电子技术》【年(卷),期】2008(031)005【总页数】3页(P8-10)【关键词】二相编码;距离旁辩;多普勒敏感;雷达【作者】姬长华;张秀丽【作者单位】中国电子科技集团公司,第27研究所,河南,郑州,450015;中国电子科技集团公司,第27研究所,河南,郑州,450015【正文语种】中文【中图分类】TN971 引言相位编码脉冲压缩雷达[1]是把编码信息调制在载波相位中的一种雷达,实践中以二相编码应用为多。
在二相编码的应用中,有三个不可回避的问题,即距离遮挡、距离旁瓣和多普勒敏感。
本文介绍了二相编码信号及几种较好的可用于脉冲雷达的信号形式[2],给出了二相编码应用时所遇到的主要问题及处理方法。
另外,从损失函数的角度论述了距离遮挡问题,提出了采用伪随机中断的方式来解决距离遮挡;取长的二相编码信号并不能无限提高主旁瓣比,因此提出用信号综合设计,即采用复杂信号的方法提高距离主旁瓣比;对于多普勒敏感,提出一种简便的分段相关算法。
2 二相编码信号一般的相位编码信号的复数形式表达式可以写成:(1)信号的复包络函数为:u(t)=α(t)ejφ(t)(2)(3)其中,φ(t)为相位调制函数,对于二相编码信号来说,φ(t)取0或π。
tp为相位编码子脉冲宽度,N为码长,T=Ntp为信号持续期。
应用傅里叶变换,可得二相编码信号频谱以及模糊函数表达式分别为:(4)(5)模糊函数是从时间和频率两个方面对信号进行分析的。
二相编码信号的模糊函数大多呈近似图钉型,有比较高的距离和多普勒分辨能力。
二相编码信号的带宽B与子脉冲带宽相近,即:B=1/tp=N/T信号的时宽带宽积或脉冲压缩比为:D=TB因此,采用长的二相码序列,能得到具有大时宽带宽积的脉冲压缩信号。
巴克码原理
巴克码原理巴克码原理是一种数字通信中常用的编码原理,它是由美国工程师贝尔提出的。
巴克码的特点是能够有效地减小信号的带宽,提高信号的传输效率,因此在数字通信领域得到了广泛的应用。
巴克码原理的核心思想是利用频率间隔较大的正弦波来表示数字信号,通过对正弦波的频率进行调制来传输数字信息。
在巴克码中,每一个数字被表示为一段特定频率的正弦波,这些正弦波被称为“巴克码”。
巴克码的生成过程是通过将数字信号进行数字滤波和频率调制来实现的。
首先,将数字信号经过数字滤波器进行滤波,得到一组频率间隔较大的正弦波。
然后,根据数字信号的取值来调制这些正弦波的频率,从而生成巴克码信号。
巴克码的优点之一是它能够有效地减小信号的带宽。
由于巴克码使用频率间隔较大的正弦波来表示数字信号,因此可以在较小的频带内传输更多的信息,提高了信号的传输效率。
这对于数字通信系统来说是非常重要的,特别是在带宽有限的情况下,巴克码能够更好地满足信号传输的需求。
此外,巴克码还具有良好的抗干扰性能。
由于巴克码的频率间隔较大,使得它对于频率偏移和噪声的影响较小,因此在实际的数字通信系统中,巴克码能够更好地抵抗信道噪声和干扰,提高了系统的可靠性和稳定性。
然而,巴克码也存在一些局限性。
由于巴克码的频率间隔较大,使得它的波形包含了大量的高频成分,这对于传输介质的要求较高,因此在实际应用中需要考虑传输介质的特性和成本。
总的来说,巴克码原理是一种非常重要的数字通信编码原理,它在数字通信系统中发挥着重要的作用。
通过巴克码原理,我们能够更有效地利用有限的频带资源,提高数字信号的传输效率和抗干扰性能,为数字通信系统的发展提供了重要的技术支持。
在未来的数字通信领域,巴克码原理有望得到更广泛的应用和发展。
《通信原理》配套教学教案
1.纠错能力和码字的构造有何关系?
2.非标准的生成矩阵如何转换为标准的生成矩阵?
3.多项式在描述循环码时有什么作用?
4.卷积码为何少采用系统码形式?
5.先进信道编码技术的优势来自哪里?
内容大纲:具体可结合本章的PPT课件进行配合讲解。
11.1引言
11.2信道编码的基本原理
11.2.1信道编码的基本概念
6.解释常见的分集技术,常见的分集合并方法有哪些?
7.解释MIMO技术的类别,大规模MIMO有哪些优点?
8.OFDM技术为什么可以有效对抗多径干扰?OFDM技术如何实现。
9.解释常见的多址技术和5G中的新多址技术。
第10章
课时内容
信息论基础
授课时间
350分钟
课时
7
教学目标
掌握不确定性、信息、互信息、熵和相对熵等基本概念;
掌握无失真数据压缩时的信源编码定理;
掌握数据压缩算法、信道编码定理;
掌握信息容量定理;
掌握有失真数据压缩时的信源编码定理--率失真定理。
教学重点
信息的度量;
信源编码定理;
信道编码定理;
香农公式;
率失真定理。
教学难点
信息量、信源熵、联合熵、条件熵和微分熵的基本概念;
信源无失真压缩与有失真压缩;
信道编码
教学内容
知识回顾:
通信系统的随机过程,以及通信系统的性能指标为可靠性和有效性。本章讨论信息论的基础内容。
讨论问题:
1.什么是信息?如何度量信息?
2.信息传输中,基本的极限条件是什么?
3.对于信息的压缩和恢复的极限是什么?
4.设计怎样的设备才能达到这些极限?
5.实际系统中接近极限的设备是否存在?
常用二相码性能比较
常用二相码性能比较王寿山;赵艳秋【摘要】相位编码具有优良的低截获概率等性能,被广泛地应用到雷达中.介绍了常用的相位编码信号——二相码的其中几种概念及产生原理,并仿真了其自相关和互相关特性,根据仿真图形分析了常用二相码的特点.【期刊名称】《舰船电子对抗》【年(卷),期】2013(036)004【总页数】5页(P23-27)【关键词】二相码;Gold码;混沌二相编码;P4码【作者】王寿山;赵艳秋【作者单位】船舶重工集团公司723所,扬州225001;船舶重工集团公司723所,扬州225001【正文语种】中文【中图分类】TN957.510 引言相位编码信号通过信号的时域非线性调相达到扩展频宽的目的,其相位编码脉冲的调制函数是离散的有限状态。
在小时宽带宽积的情况下,压缩性能好,主副瓣比大,雷达的峰值发射功率得到显著降低。
最主要的缺点是对多普勒频移很敏感(与调频信号相比),一般在脉宽τ内,当多普勒频移大于1/4波长时,脉冲压缩的性能显著下降;另一缺点是时间取样损失大。
由于相位编码信号在编码上灵活,可实现波束捷变和低截获的特点,越来越被广泛地应用到高性能雷达上。
相位编码信号是通过相位的离散编码得到的,如果相移只取0,π2个值,被称为二相码,包括巴克码、m序列、L序列、Gold序列、混沌二相码及组合码等;如果相移取2个以上的值时,则称为多相码,包括弗兰克码、霍尔曼码、伪随机码。
1 MAC序列1.1 MAC序列的定义MAC序列是一种任意长度的理想相关峰值的二元序列,具有良好的自相关特性,长度任意而且容易产生,特别是对于相同长度的MAC序列,选取不同的参数,可以形成不同的MAC序列,其峰值大小和位置也不一样。
在准连续波雷达信号设计中,MAC序列有着广泛而又灵活的应用。
1.2 MAC序列的产生对于产生一个长度为L的MAC序列,首先确定1个素数P,(L/3<P<L),同时选择u,v,u+v=L-P,然后,应用二次剩余算法,产生核心序列{an:0≤n≤P-1}。
时延扩展相关带宽和多普勒频移的基本概念
时延扩展相关带宽和多普勒频移的基
本概念
时延扩展、相关带宽和多普勒频移是与信号传输和信号处理相关的基本概念。
下面是它们的简要解释:
1. 时延扩展(Time Delay Spread):时延扩展是指在无线信道传输中,信号在到达接收端之前经历的多路径传播引起的时延差异。
当信号通过不同的传播路径到达接收端时,由于路径长度和传播速度的差异,不同路径上的信号会有不同的传播时延。
时延扩展的概念是用来描述这些时延差异的幅度和分布。
2. 相关带宽(Coherence Bandwidth):相关带宽是指信道中传输的信号在频域上保持相关性的带宽范围。
在具有多径传播的信道中,信号会受到不同路径引起的时延扩展效应。
当时延扩展较大时,信道中的多个传输路径会导致信号的频率响应产生衰减和相位变化,从而使信号在频域上失去相关性。
相关带宽描述了信道中信号频率响应的变化范围,即在该范围内信号仍保持相关性。
3. 多普勒频移(Doppler Shift):多普勒频移是指由于信号源或接收器相对于移动引起的频率变化。
当信号源或接收器与观察者之间存在相对运动时,由于多普勒效应,信号的频率会发生变化。
具体而言,当信号源或接收器靠近观察者时,频率会变高,称为正向多普勒频移;当信号源或接收器远离观察者时,频率会变低,称为负向多普勒频移。
多普勒频移在移动通信、雷达等领域中具有重要的应用。
这些概念在无线通信、雷达、声音传播等领域中具有重要的意义。
它们帮助我们理解信号传输过程中的时延差异、频率响应变化以及信号的频率偏移。
在相关的技术中,我们需要考虑和处理这些因素,以便正确地传输和处理信号。
利用帧头扩展扩频系统多普勒容限的方法
利用帧头扩展扩频系统多普勒容限的方法摘要:由于伪随机序列具有多普勒频移敏感特性,所以扩频接收机需要在频域和时域同时进行捕获。
为缩短捕获时间,可在数据解调支路采用并行多通道进行叉—点积法进行频率估计,但传统的叉—点积法鉴频范围仅为数据速率的1/4,多普勒容限较小。
为此,提出了一种利用数据帧头避免叉—点积方法中频率符号反转的方法,可以将数据解调支路多普勒容限扩大一倍。
关键词:多普勒容限; 扩频通信; 突发传输; 并行多通道在突发扩频数传系统中,多普勒频移导致相关峰下降并可能使解调数据极性反向,这就要求接收机在频域和时域同时进行捕获。
传统的基于FFT[1,2]的方法或者锁频法均难以实现在几个数据码元内的频率捕获。
而在数据解调支路中利用多个并行通道进行频率估计可以在很短的时间内实现频率的粗同步。
但在频率估计过程中,当多普勒频移超过数据速率1/4时,叉—点积法估计的频率将产生符号反转,从而输出错误的频率估计。
为提高叉—点积法的频率鉴别范围,可在同一个数据符号内采样从而扩大多普勒鉴频容限[3],但该方法要求相关累加后的相邻的I和Q采样是在同一个数据位内,因此仅适合类似GPS这种一个数据符号内有多个伪码周期的场合。
本文提出了利用已知的数据帧头作为叉—点积法中的符号,可有效消除普勒频移超过数据速率1/4并且小于数据速率1/2时符号反转导致的错误频率估计,使频率估计的多普勒容限扩大一倍。
1 叉—点积法频率估计原理突发扩频数传接收机内部设置捕获和数据解调两个通道, 捕获通道通过匹配器实现伪码的快捕。
每一帧数据到来时, 匹配器捕获伪码以后,通过设置本地伪码发生器的相位获得同步伪码,数据解调通道则利用同步伪码实现接收信号的解扩解调和频率估计,接收机利用频率估计值在几个并行的数据解调支路中选择一路输出,这几路并行的数据解调支路结构完全相同,不同的只是数字下变频时的本振频率不一样。
2FSK扩频系统中多普勒频移容限扩展的一种方法
系统 的 信 噪 比。
化 , 以 。 就 要 求 对 接 收 机 基 带 信 号 中 的 多 普 勒 频 移 容 限 所 这
进行扩展 , 以改 善 对 相 关 峰 的影 响 。
1 F K 扩 频 信 号 调 制 及 解 调 解 扩 处 理 流 程 S
在 传 统 的 F K直 接 扩 频 通 信 系 统 [ 发 射 端 , 源 输 出 S 5 1 的 信
的信 号 是 码 元 持 续 时 间 为 的信 息 流 . 信 码 与 伪 随 机 码 产 生 将 器 产 生 的 伪 随 机 码 进 行 模 2加 . 生 速 率 与 伪 随 机 码 速 率 相 产 同 的 扩 频 序 列 , 后 再 用 扩 频 序 列 去 调 制 载 波 , 样 就 得 到 然 这 已扩 频调 制 的 射 频 信 号 。 在 接 收 端 , 收 到 的 扩 频 信 号 经 高 放 和 混 频 后 , 与 发 接 用 射 端 同 步 的 伪 随 机 序 列 对 中 频 的扩 频 调 制信 号 进 行 解 扩 . 最 后 经 信 息 解调 , 复 出所 传 输 的信 息 , 而 完 成 信 息 的传 输 。 恢 从
目前 。 于 扩 频 系 统 多 普 勒 频 移 容 限 扩 展 的 研 究 . 般 关 一
只 是 局 限 在 相 移 键 控 (S 扩 频 信 号 [ . 于 频 移 键 控 P K) 3 对 1 上 (S 扩 频 信 号 尚 未 提 及 , 大 多 数 针 对 l 扩 频 系 统 的 研 F K) 而 :
c rea in p a ,ameh d t x e d Do p e hf l r n e i F K p e d s e t m o o r lt e k t o e tn p lr i t e a c 2 S s r a p cr c mmu ia o y tm r p s d, a o o s to n u nc t ns s i e ipooe t t s h
一种扩展GMSK扩频多普勒捕获范围的方法
一种扩展GMSK扩频多普勒捕获范围的方法
廖小海;欧家成;周彬;王慧;许洋
【期刊名称】《宇航计测技术》
【年(卷),期】2024(44)2
【摘要】伪码捕获在短时猝发GMSK(高斯滤波最小频移键控)扩频通信中是不可缺少的一环,尤其是在接收端弱信号的情况下,多普勒频移会严重影响接收端伪码捕获性能。
针对短时猝发GMSK扩频体制的特殊性,设计了接收端伪码捕获算法,推导分析了该捕获算法的相关公式,并在此基础上提出了一种多通道并行接收捕获的方法以适应短时猝发条件,该方法通过扩展多普勒适应范围以提升GMSK扩频通信系统伪码捕获性能,将该方法应用到短时猝发GMSK扩频通信系统中,可提升伪码捕获峰值阈值约2.7 dB以满足系统灵敏度要求,且占用硬件资源较少。
【总页数】8页(P31-38)
【作者】廖小海;欧家成;周彬;王慧;许洋
【作者单位】中国航天电子技术研究院;北京遥测技术研究所
【正文语种】中文
【中图分类】TN914.42;V423.45
【相关文献】
1.一种扩展水下扩频信号多普勒容限方法
2.2FSK扩频系统中多普勒频移容限扩展的一种方法
3.一种扩展载波环频率捕获范围的方法
4.大多普勒偏移下直接序列扩频信号捕获新方法
5.一种短时猝发GMSK扩频多普勒估计算法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
Chirp扩频通信系统提高多普勒容限研究
Chirp扩频通信系统提高多普勒容限研究作者:张晓燕刘涵郑秋云何时秋李默来源:《大东方》2017年第08期摘要:本文提出一种基于交叠技术的chirp扩频通信方式,其基本原理是通过改变chirp 信号的调频率来提高通信系统的抗多普勒性能,最后利用稳态分布模拟水声信道进行计算机仿真,结果证明,基于交叠技术的chirp扩频系统相较于传统chirp扩频系统有更好的抗多普勒性,更适于水声通信。
关键词:水声通信 chirp扩频交叠技术多普勒由于水声信道的特殊性,如何在随机衰落、复杂多径的信道环境中实现信息的可靠传输是水声通信的第一要素[1]。
相比窄带通信,扩频技术具有显著的抗干扰与抗衰落能力而被广泛应用于水声通信。
目前常用的扩频技术有chirp扩频、直接序列扩频以及跳频技术,相比后两者,chirp信号因具有较大的时宽带宽积,从而拥有更强的抗频率选择性衰落、抗多普勒以及抗环境噪声能力,已经成为研究热点。
Chirp扩频技术是通过chirp脉冲调制来发送信息以达到扩频的目的,它无需加入伪随机序列,因为其可以利用chirp信号自身的线性频率特征。
当前,应用较多的chirp扩频调制方式主要为二进制正交键控调制和直接调制。
前者的调制原理较简单,在接收端只需检测能量即可,可以通过模拟搭建系统,然而,因为up chirp 和down chirp具有一定的相关性,导致其抗多普勒能力不高[2];而后者调制对多径的适应力较强,但在接收端需要幅度相位信息,复杂度较高。
因此,本文提出一种基于交叠技术的chirp扩频调制方法。
一、水声通信信道特征众所周知,水声通信信道与无线电通信信道存在着许多实质性的差异。
因此,要想设计出适配于实际环境水声信道传输的通信系统,就需要深入了解水声信道特异的声传播规律。
首先,水声信道具有较大传输衰减,会限制通信传输距离,并且它所容许采用的带宽又比无线通信中的带宽窄很多,从而又导致通信速率较低;其次,水声信道中存在着比信号脉冲宽度大得多的随机时-空-频变多径结构,导致其多径效应十分突出;最后,水声通信是通过声波进行传输,声波传输速率较低,导致生源和接收器相对运动速度较大,多普勒效应显著。
说明时延扩展,相关带宽和多普勒扩展,相关时间的概念

说明时延扩展,相关带宽和多普勒扩展,相关时间的概念
答案解析
(1)时延扩展
符号周期(带宽的倒数)远大于△,则为窄带系统(所有回波都会落在同一个符号周期内)
使用带宽很大的信道并不一定是带宽通信
(2)相关带宽
在相关带宽之内,信道是一个频率非选择性信道,信号可以顺利传输,无大的失真
信号带宽超过相关带宽,信道是一个频率选择性信道
从频域角度定义窄带系统和宽带系统
(3)多普勒扩展
多普勒扩展定义为多普勒功率谱密度标准差
当信号带宽远远大于多普勒扩展—慢衰落
否则快衰落信道
(4)相关时间
数据符号周期远远小于相关时间—慢衰落
否则为快衰落信道。
宽带信号的多普勒延展和缩放
宽带信号的多普勒延展和缩放The problem of broadband signal Doppler spread and scaling is a significant challenge in the field of wireless communication. Doppler spread refers to the frequency shift experienced by a signal due to the motion of the transmitter, receiver, or both. This phenomenon is particularly relevant in mobile communication systems, where the relative motion between the transmitter and receiver can cause significant frequency shifts that degrade the quality of the received signal. On the other hand, signal scaling refers to the change in the amplitude and phase of the signal due to various factors such as distance, obstacles, and environmental conditions. Both of these effects can have a detrimental impact on the performance of broadband communication systems, leading to reduced data rates, increased error rates, and degraded overall system capacity.From a technical perspective, the Doppler spread and scaling of broadband signals can be attributed to thefundamental principles of wave propagation and the characteristics of the transmission medium. When a signal is transmitted through a medium, it interacts with the surrounding environment, leading to changes in its frequency, amplitude, and phase. In the case of mobile communication systems, the relative motion between the transmitter and receiver introduces Doppler spread, causing the received signal to be spread out in frequency. This effect can be particularly pronounced in high-speed scenarios, such as in vehicular communication or satellite communication, where the relative velocities are significant. Similarly, signal scaling is influenced by factors such as path loss, shadowing, and multipath propagation, which can cause the received signal to be attenuated and distorted.The impact of Doppler spread and scaling on broadband communication systems is multifaceted, affecting various aspects of system performance. One of the primary consequences of these effects is the degradation of signal quality, leading to increased error rates and reduced data rates. In high-speed mobile communication scenarios, theDoppler spread can cause significant frequency shifts, leading to inter-symbol interference and symbol smearing, which can degrade the performance of modulation and demodulation schemes. Similarly, signal scaling can lead to amplitude and phase distortions, causing signal fading and degradation in the received signal quality. These effects can significantly impact the reliability and robustness of broadband communication systems, particularly in scenarios with high mobility and dynamic environmental conditions.From a practical standpoint, the mitigation of Doppler spread and scaling in broadband communication systems is a critical area of research and development. Various techniques and technologies have been proposed to address these challenges, aiming to improve the performance and reliability of wireless communication systems. One approach to mitigating Doppler spread is the use of adaptive modulation and coding schemes, which can dynamically adjust the modulation and coding parameters based on the channel conditions. By adapting to the changing Doppler spread, these schemes can maintain a reliable link and improve the overall system capacity. Similarly, for signal scaling,techniques such as diversity combining, equalization, and channel estimation can be employed to mitigate the effects of fading and distortion, improving the quality of the received signal.The significance of addressing the problem of broadband signal Doppler spread and scaling extends beyond technical considerations, impacting various aspects of modern society and the economy. With the increasing reliance on broadband communication for critical applications such as autonomous vehicles, smart cities, and industrial automation, the need for robust and reliable wireless communication systems has never been more critical. The ability to mitigate the effects of Doppler spread and scaling is essential for ensuring the seamless and reliable operation of these applications, safeguarding public safety, enhancing productivity, and driving economic growth. As such, the development of effective solutions to address these challenges is of paramount importance for the continued advancement of wireless communication technology and its widespread deployment across various industry sectors.In conclusion, the problem of broadband signal Doppler spread and scaling is a significant challenge in the field of wireless communication, with far-reaching implications for system performance, reliability, and societal impact. From a technical perspective, these effects are rooted in the fundamental principles of wave propagation and the characteristics of the transmission medium, leading to changes in frequency, amplitude, and phase. The impact of Doppler spread and scaling on broadband communication systems is multifaceted, affecting various aspects of system performance and reliability. Mitigating theseeffects is essential for ensuring the robustness and reliability of wireless communication systems, particularly in high-speed and dynamic scenarios. The development of effective solutions to address these challenges is critical for advancing the state-of-the-art in wireless communication technology and enabling the widespread deployment of broadband communication systems across various industry sectors.。
扩展频谱信号的解扩和解调
2021年1月
扩谱通信
27
一般外差式相关器的结构
直扩
跳扩
2021年1月
扩谱通信
28
一般外差式相关器的过程
本地产生的PN码先与本地振荡器产生的与接收信号 差一个中频信号的本地振荡信号在下面一个平衡调 制器进行调制,产生本地参考信号 ,是一个展宽了 的信号
扩谱通信
30
中频相关方式的组成
混频器与相关器不是同一个部件
2021年1月
扩谱通信
Байду номын сангаас
31
外差式相关器的特点
优点
➢ 克服了干扰信号泄漏问题 ➢ 所有跳频系统几乎都采用外差式相关器,直扩系统
也多用此相关器
缺点
➢ 结构复杂
2021年1月
扩谱通信
32
C、基带相关器
是一种在基带完成相关运算的部件
利用混频器(现在一般是数字下变频),采用零中 频技术,把输入的扩频信号的中心频率搬移到零中 频上,得到基带的扩频信号,再进行相关处理
2021年1月
扩谱通信
15
4.2 直扩系统相关解扩、载波同步
直扩系统相关解扩 直扩系统的载波同步
2021年1月
扩谱通信
16
扩展频谱信号的收端处理
首先对扩展频谱信号进行解扩(解跳)
➢ 对DS或FH系统,扩展频谱信号的解扩或解跳是通过与一 个本地参考信号相乘来完成的,而这个本地参考信号在结 构上与发射端的信号完全相同,在时间或相位上与由发射 端传输到接收端的有用信号同步
剩下的只是原始信息调制的载波信号,送入到基带 解调器解调,恢复发射端的基带信号
利用帧头扩展扩频系统多普勒容限的方法
利用帧头扩展扩频系统多普勒容限的方法党群;吴广伟【期刊名称】《电子技术应用》【年(卷),期】2011(37)6【摘要】由于伪随机序列具有多普勒频移敏感特性,所以扩频接收机需要在频域和时域同时进行捕获.为缩短捕获时间,可在数据解调支路采用并行多通道进行叉-点积法进行频率估计,但传统的叉-点积法鉴频范围仅为数据速率的1/4,多普勒容限较小.为此,提出了一种利用数据帧头避免叉-点积方法中频率符号反转的方法,可以将数据解调支路多普勒容限扩大一倍.%The two dimensional searching processes in frequency and time domain are needed for the PN-code sensitivity to Doppler shift. In order to reduce acquisition time, receiver estimates the frequency using traditional CPAFC(Cross-Product Automatic Frequency Control) with 1/4 data rate discriminate range. A method is proposed to avoid the frequency sign inversion and double the Doppler tolerance data channel by using data frame header.【总页数】3页(P113-114,118)【作者】党群;吴广伟【作者单位】西北工业大学365研究所,陕西西安710072;西北工业大学365研究所,陕西西安710072【正文语种】中文【中图分类】TN914【相关文献】1.一种扩展水下扩频信号多普勒容限方法 [J], 苏建军;冯西安;白晓娟;李志伟2.伪码捕获和多普勒频移容限扩展的方法 [J], 薛敏彪;张会娜;张炳军;党群3.2FSK扩频系统中多普勒频移容限扩展的一种方法 [J], 薛敏彪;王坤;党群4.近程PRC-CW雷达扩展多普勒容限方法研究 [J], 赵兆;是湘全;王志华5.利用部分相关法扩展多普勒容限的方法 [J], 薛敏彪;巨欢;张炳军;党群因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
巴克码多普勒容限带宽的扩展杨文华 宋力平 王其扬 (航天工业总公司八院804所 上海200082)文 摘 介绍和分析了多普勒容限带宽扩展的几种方法,提出用设计包络约束(EC)滤波器的方法设计巴克码的多普勒频移补偿滤波器,可以同时进行旁瓣抑制和多普勒容限带宽的扩展,并且使信噪比损失较小。
经计算机仿真证明有较好的结果。
主题词 巴克码 多普勒容限带宽 包络约束滤波器 多普勒频移补偿滤波器收稿日期:1997 05 29系上海市宇航学会会员。
0 引言相位编码信号有许多优点,但它有多普勒频移敏感性。
当雷达信号回波存在多普勒频移时,脉压后主瓣加宽,旁瓣增大,甚至起不到脉冲压缩的作用,这就限制了它的应用,因此多普勒容限带宽的扩展日益受到重视。
一方面,人们通过寻找新的码型来解决这个问题,如NLFM 码(Non Linear FM Sig nals)就是通过取样和量化非线性调频信号而来的,它具有低旁瓣特性和多普勒频移的不敏感性;另一方面,人们在雷达系统和旁瓣抑制滤波器上进行了研究。
文献[2]提出了采用非相干处理结构来降低多普勒频移的敏感性,文献[3]在非相干处理结构的基础上,在某一多普勒频率上采用不同的最佳准则设计多普勒频移补偿滤波器,得到了比较好的效果。
在实际应用中,也采用了多路匹配滤波器等各种各样的处理方法。
1 几种多普勒补偿滤波器的设计在信号检测链路中,为了降低旁瓣电平,采用了旁瓣抑制滤波器。
旁瓣抑制滤波处理在求模运算以前进行,称之为相干处理;反之,旁瓣抑制滤波处理在求模运算以后进行,称之为非相干处理[2],如图1所示。
图1 信号检测链路框图分析表明:采用非相干处理结构,可以降低多普勒频移的敏感性和扩展多普勒容限带宽[3]。
但是这样扩展是有限的:当目标高速飞行或旁瓣抑制滤波器应用于多普勒(PD)雷达时,非相干处理的多普勒容限带宽扩展已不能满足需要。
由于非相干处理结构的旁瓣抑制滤波器所考虑的只是多普勒频率的绝对值,其性能是关于零多普勒频率对称的,所以,就能以某一多普勒频率为中心频率,设计非相干处理结构的旁瓣抑制滤波器,得到较大的多普勒容限带宽。
根据文献[2]的分析,不论旁瓣抑制滤波器是非相干处理型的,还是相干处理型的,其主瓣附近的第一旁瓣随多普勒频移增大而增加得非常快。
若考虑第一旁瓣,则旁瓣抑制滤波器的多普勒容限带宽是有限的。
因此,放宽对第一旁瓣的约束,把第一旁瓣的上升看作是主瓣的加宽是很有意义的。
当然,这会使雷达的距离分辨力下降。
曾有人运用最小平方近似逆滤波(LS)的方法设计出了补偿式非相干处理结构的旁瓣抑制滤波器。
下面介绍用LS法设计补偿滤波器的原理。
对给定的输入序列,通过滤波器后得到的输出序列与希望得到的输出序列之间的均方差最小。
假设实际输入序列为(a0,a1, !,a M)T,滤波器的加权序列为(b0,b1,!, b N)T,实际输出序列为(c0,c1,!,c M+N)T:c=a b(1)对于旁瓣抑制问题而言,我们希望输出序列为:在L处为1,而在别的时刻为0,则最小均方逆滤波就是使下式为最小V=c20+c21+!+(c L-1)2+!+c M+N2(2)式中V∀∀∀实际响应和理想输出序列之间的能量差。
以巴克码为例,当码元时宽T=0.7 s,多普勒频移f d=20kH z时,同时放宽第一旁瓣的约束,并对理想输出的约束加以适当处理,则可以得到长度为25的LS补偿式旁瓣抑制滤波器的权系数。
表1为对最大值归一化的权系数。
表1 LS补偿式旁瓣抑制滤波器的权系数-0.04964 0.00010 -0.04879 -0.00180 -0.04833 -0.03657-0.05363-0.04003-0.04757-0.03791 -0.057090.21673 1.000000.21673-0.05709 -0.03791-0.04757-0.04003-0.05363-0.03657 -0.04833-0.00180-0.048790.00010-0.04964同样,文献[3]用线性规划(LP)的方法设计了13位巴克码的补偿滤波器。
设子码宽度T=0.7 s,选用15kHz为多普勒频移补偿点,运用线性规划。
a目标函数:使主瓣峰极大化,即max#M-1i=0h i A l i-(M-2N+1)/2(3) b约束条件:限制最大旁瓣电平;满足所要求多普勒容限带宽下尽可能限制主瓣峰的展宽#M-1i=0|h i A l i-k|∃11-2N∃k∃M-1k%(M-2N+1)/2k%(M-2N+1)/2l(4) #M-1i=0|h i A li-(M-2N+1)/2|∃s(5)式中 N∀∀∀巴克码的位数;{h i}∀∀∀旁瓣抑制滤波器的权序列,i=0,1,!,M -1;{A l }∀∀∀巴克码经匹配滤波后的模序列,其多普勒频移f d =15kHz , l =1,2,!,2N -1。
在满足多普勒容限带宽下,M 应尽可能小,同时选择s 使主瓣峰作最小展宽。
经过计算、比较,以及经适当的合并、简化,得到M =29,s =20。
此时,可获得对理想滤波器逼近的最大多普勒容限带宽。
表2为LP 补偿式旁瓣抑制滤波器的权系数。
表2 LP 补偿式旁瓣抑制滤波器的权系数0.033208 0.019531 -0.0527340.011719 -0.0488280.011719-0.042969-0.042969-0.042968-0.042969-0.033208-0.042969-0.0527340.148438 1.0000000.148438-0.052734-0.042969-0.033208-0.042969-0.042969-0.042969-0.0429690.011719-0.0488280.011719-0.0527340.0195310.033208在以上两种方法中,考虑的是最佳的主旁瓣比和最佳的均方旁瓣。
如果信号在通过旁瓣抑制滤波器以后,有很大的信噪比损失,那末就会严重影响后面的检测性能。
因此,信噪比损失也是旁瓣抑制滤波器的一项重要指标。
设计包络约束滤波器的出发点就是使信噪比损失最小。
由此可见,用设计EC 滤波器的方法设计非相干处理结构的补偿滤波器是有实际意义的。
2 包络约束(EC)滤波器包络约束滤波器是Evans J 等人提出的。
其原理如下:假设一输入信号为s ,通过一滤波器后,其输出( )为一介于上包络e +和下包络e -之间的脉冲形信号,如图2所示。
设U 为滤波器有限长时不变冲激响应,则=sU(6)在实际中,噪声是普遍存在的。
以最普遍的白噪声为例,定义最优的包络抑制滤波器为在满足包络约束的条件下,噪声能量最小的滤波器。
因为噪声能量正比于范数&U &的平方,所以可以用数学公式表示minimize &U &2(7)条件是e -(t)∃ (t)∃e +(t)(8)这里 (t)=∋U ( ) s (t - )d(9)图2 EC 滤波器(a)框图;(b)脉冲包络示意图;(c)用于雷达脉冲压缩的脉冲包络示意图。
由于规定了上下包络,在物理意义上可以认为限制了主旁瓣比。
在此条件下,EC 滤波器使滤波器的信噪比损失最小。
在离散情况下,假设信号s =(s 1,s 2,!,s m )T ,滤波器加权因子U =(u 1,u 2,!,u n )T ,输出信号 =(!1,!2,!,!N )T =SU,N=m+n-1,其中S为N(n矩阵S=s100!0s2s10!0s3s2s1!0!!!!!s m s m-1s m-2!s m-n0s m s m-1!s m-n+1!!!000!s m04则式(7)~(9)可以写成minimiz&U&2=U)U(10)条件是|SU-d|∃e,即S U-d∃e(11)-S U+d∃e(12)其中 d=(e++e-)/2=(d1,d2,!,d N)T e=(e+-e-)/2=(e1,e2,!,e N)T 文献[1]详细推导了这个问题的解决过程。
本文只引用了最后的结论。
根据对偶理论,当U*=-S)∀*/2时,即可满足式(10)。
其中∀*的递推公式为∀k+1=∀k+a I(∀k)(13)式中I(∀k)为N(1矩阵;k为叠代次数, k=1,2,!,∗;I(∀k)=(l1,l2,!,l N),其中l(∀k)=-[(SS)∀)i/2+d1+e i]i+#+,Q+-[(SS)∀)i/2+d1-e i]i+#-,Q-i+Q07(14)i=1,2,!,N 其中:#+={i: ∀>0}#-={i: ∀<0}Q+={i+#0:-[(SS)∀)i/2+d1+ e i]>0}#0={i: ∀=0}Q-={i+#0:-[(SS)∀)i/2+d1-e i]<0}Q0={#0-Q+-Q-}则有U k=-S)∀k/2, k=1,2,!(15)且&U k-U+&−0 k−∗(16)这样,我们就可以得到EC滤波器的加权系数。
设计EC滤波器的出发点就是使噪声能量最小。
尽管文献中是以白噪声为例进行推算的[1],但可以很容易地推广到色噪声的情况。
另外,也可以不采用&U&准则而很方便地采用别的准则(如最小均方准则)来设计滤波器。
和LS法一样,我们选用了20kH z的多普勒频移补偿点,码元时宽T=0.7 s。
此时输入信号是有20kHz多普勒频移的13位巴克码的匹配滤波后的模序列{A l}。
设上包络e+=(0.01,0.01,!,0.01,10, 10,10,0.01,!,0.01)T;下包络e-=(-0.01,-0.01,!, -0.01,9.9,-0.01,!,-0.01)T。
运用式(13)进行叠代运算,再用式(15)进行计算,即可得到EC滤波器的权系数。
当k=200,a=1.5时,通过计算机编程运算,得到最大值归一化的权系数如表3所示。
表3 EC补偿式旁瓣抑制滤波器的权系数根据得到的权系数,运用计算机进行模拟仿真,可以得到以上三种补偿滤波器的性能,如图3和表4所示。
图3 四种滤波器的多普勒容限带宽表4 三种补偿滤波器的比较频偏f d /kH z 最大旁瓣/dB第一旁瓣/dB积累旁瓣/dB 信噪比损失/dB 0-31.80-29.16-32.49 -12.91 -16.39 -14.04-20.82-18.86-21.31 1.2540.5630.6685-32.11-31.13-32.39-11.51-14.19-12.41-22.48-20.41-22.870.6650.5370.58910-32.05-33.89-32.31-10.35-12.48-11.08-23.77-21.98-24.010.5830.5190.52415-32.01-36.81-32.23-9.357-11.06 -9.964-24.46-23.35-24.490.5610.5550.52420-31.96-35.47-32.16-8.492-9.852-8.993-24.34-24.00-24.280.5960.6580.58125-31.92-33.94-32.09-7.72-8.786-8.129-23.48-23.40-23.160.6910.8160.69530-31.88-32.26-32.02-7.018-7.823-7.345-22.09-21.73-21.690.8431.0340.86935-31.77-30.69-31.67-6.353-6.925-6.607-20.56-19.90-20.15 1.0611.3171.10640-30.87-29.63-29.96-5.544-5.946-5.739-19.52-20.07-19.351.3871.7111.453注:表中的数据分别为LS ,LP 和EC 补偿滤波器的数据。