地震救援机器人的设计与制作
机井救援机器人的设计

机井救援机器人的设计机井救援机器人是一种能够在地下作业中进行营救和救援任务的特种机器人。
它主要用于在地震、矿难、坍塌等事故发生后,对被困人员进行搜索、救援和医疗救治。
它具备自主导航、定位和探测能力,同时配备有机械臂、摄像头、传感器等多种装备,能够灵活应对各种复杂环境和任务。
机井救援机器人的设计需要考虑到其在地下环境中的复杂性和危险性。
为了保证机器人的稳定性和可靠性,它需要具备优秀的机械结构和动力系统。
机械结构应采用坚固耐用的材料,并具备良好的抗震性能。
动力系统应采用高效能源供应方式,如电池或燃料电池,以确保机器人能在没有外部电源的情况下正常运行。
机井救援机器人需要具备自主导航和定位能力,以快速准确地找到被困人员的位置。
它可以通过激光扫描、摄像头和传感器等设备,获取地下环境的信息,然后利用内置的导航算法,进行路径规划和动作控制。
机器人还应具备自动避障功能,以保证其在复杂地形中的安全运行。
机井救援机器人应配备有多种救援装备,如机械臂、摄像头和传感器等。
机械臂可以帮助机器人进行物体抓取和搬运,以协助被困人员的救援。
摄像头可以用于实时监测地下环境和被困人员的状态,以指导救援行动。
传感器可以用于探测并分析地下环境的气体浓度、温度等信息,以保证救援过程的安全性。
机井救援机器人还应具备医疗救治能力,以满足被困人员的急救需求。
它可以配备有医疗器械和药物,如心电图仪、呼吸机和止血药等,用于紧急救治被困者的伤势。
机器人还应具备远程通信功能,以便与医生或救援人员进行实时交流,获取专业指导和救援支持。
机井救援机器人的设计需要考虑到地下环境的复杂性和危险性,并具备稳定性、可靠性和自主导航等功能。
它能够在发生事故后快速准确地定位和救援被困人员,并具备多种救援装备和医疗救治能力,以提高救援效率和人员生存率。
这种机器人的出现将为救援工作带来革命性的变化,极大地提高地下救援任务的安全性和效率。
多功能辅助救援机器人设计说明书
多功能辅助救援机器人设计说明书【多功能辅助救援机器人设计说明书】设计说明书目录1. 引言2. 设计背景3. 机器人功能和特点4. 机器人体系结构5. 机器人硬件设计5.1 机器人外观设计5.2 机械结构设计5.3 传感器系统设计6. 机器人软件设计6.1 控制算法设计6.2 路径规划与导航系统设计6.3 人机交互界面设计7. 机器人救援应用场景8. 总结与展望1. 引言本设计说明书旨在介绍一款多功能辅助救援机器人的设计原理和详细技术规格。
该机器人通过结合先进的硬件和软件技术,实现了在紧急救援、灾害场景以及其他危险环境中提供有效帮助的功能。
2. 设计背景灾害和紧急情况频繁发生,为保护人员的生命安全,提高救援效率,开发一种多功能辅助救援机器人势在必行。
该机器人能适应不同的救援任务,能够执行搜救、扫描、信息收集、物资运输等多种任务,以帮助减少人员风险。
3. 机器人功能和特点本机器人具备以下核心功能:- 搜救能力:能够根据预设目标进行定位和搜救任务,提供实时图像和声音反馈。
- 环境探测:通过传感器系统感知环境,提供温度、湿度、气体浓度等相关信息。
- 物资运输:具备承载货物和物资的结构设计,并能够在复杂环境中稳定运输。
- 人机交互:通过友好的界面设计,与用户进行简单有效的交互和指令传达。
4. 机器人体系结构本设计采用分层体系结构,包括控制层、感知层和执行层。
控制层负责决策和控制机器人移动、任务执行;感知层通过传感器感知环境、采集数据;执行层根据控制层和感知层的指令执行对应任务。
5. 机器人硬件设计5.1 机器人外观设计机器人外观设计追求紧凑、轻便和易操作的原则,采用金属材质、流线型造型,并配备防护装置,提高其耐用性和适应能力。
5.2 机械结构设计机械结构设计以实现多功能为目标,通过关节和伺服驱动实现机器人的运动和抓取功能。
机械结构采用轻量化、高强度材料,并应具有抓取力和负载能力。
5.3 传感器系统设计传感器系统设计包括视觉传感器、声音传感器、温湿度传感器和气体浓度传感器等。
机器人———抗灾救援毕业设计
机器人———抗灾救援一、作品简介本设计是一种在规定尺寸范围内既能在平地顺利转弯、行进此作品是根据抗灾救援中出现人被困于交通中断、封闭空间中的复杂地形中,救援人员无法到达那些复杂地区而导致延误救援时间,所以我们设计了抗灾救援机器人,我们设计的机器人适用于各种复杂地形,并且可以通过准确的人为控制解救被困于被重物形成封闭空间中的人。
由于我们的设计的机器人的移动是由4个可以360度转动的轮子组成,所以可以在复杂环境中自由移动,受环境的约束小;遇到过不去的沟或河道时,我们可以通过控制机器人架桥来障碍,达到救援现场;当有重物阻挡道路或者被重物困住时,我们通过控制机械手臂来移除和搬运重物。
二、研制背景及意义2.1这些机器人的参与,在救灾方面可以起到事半功倍的效果。
随着救灾机器人的完善,所需的人力也就会减少很多,从而使得跟少的人从事救灾这样危险的工作,更有效的起到了保护人民安全的作用。
所以我们要从学生时代抓起,充分利用年轻人的聪明才智,也为国家发掘人才,做出贡献。
,同时也可以调动年轻一带对科学的热爱与认知。
积极参加这类活动,可以是我们的聪明才智的到更好的发挥,同时也相当于对国家关于抗震救灾做出自己小小的贡献。
2.2随着科学技术和经济的不断发展,先进制造技术和数控技术、最优化设计的广泛应用,使得生产进一步智能化、自动化、经济化。
创新设计得到越来越重视也并得到广泛的发展,也变得智能化,很多问题可以通过计算机实现,减轻了设计的强度,缩短了设计周期,结合优化设计,创新设计变得异常简单,市场上的商品由此变得纷繁多样。
2.3培养大学生的创新意识和创新能力,注重培养大学生的创新设计能力、综合设计能力和协作精神;加强大学生动手能力的培养和工程实践的训练;丰富和活跃校园学术氛围。
三、设计具体要求3.1参赛作品的总体要求(一)机器人重量不限,但应尽可能轻。
(二)机器人造价不限,但应尽可能低。
(三)机器人操控可采用线控或遥控法方式。
地震救援机器人设计研究
摘 要我国是世界上地震灾害频繁发生的国家之一。
地震灾害以其瞬间突发性、破坏性强、严重性强和次生灾害多样性等特点,严重威胁着人类的生命和财产安全。
地震灾害发生后的72小时里,被困人员的存活率随时间的推移逐渐降低。
又因地震废墟环境具有范围广、受灾面积大、伤亡情况不确定和次生灾害频发等特点,所以地震救援具有时间紧急、救援难度大等特点。
随着科学技术的进步与发展,出现了可以用于地震救援的救援机器人。
地震救援机器人因具有可以连续执行救援任务,代替救援人员深入危险环境,可以搭载相应的工具深入废墟环境进行救援得到认可。
但是救援机器人依然存在着受地震废墟环境影响,作业方式与救援需求不匹配,救援效率不理想等问题。
本文主要采用文献资料法、分析法和比较研究法进行研究。
研究目的是解决复杂地震废墟环境影响救援机器人使用,作业方式与救援需求不匹配,救援机器人救援效率不理想等问题。
基于救援机器人的相关技术和研究成果,设计研究新型地震救援机器人。
通过调研与分析,我们提出了地震救援机器人设计的相关要求,主要包括全地形通过、工具多功能、机身轻量化、型号体系化和外观辨别化设计要求。
通过对这些设计要求的深入分析研究,结合地震救援机器人的设计原则,我们可以知道满足这些要求的地震救援机器人能更好地适应废墟环境,也能改善救援效率不理想等问题。
最后,根据设计要求、设计原则和地震救援的相关内容,进行具体解决方案的设计。
关键词地震灾害;救援;废墟环境;被困人员;机器人AbstractChina is one of the countries with frequent earthquake disasters in the world. Earthquake disaster is characterized by its sudden, destructive, serious and secondary disaster diversity, which seriously threatens the safety of human life and property. In the 72 hours after the earthquake disaster, the survival rate of the trapped people gradually decreased with the passage of time. Because of the wide range, large disaster area, uncertain casualties and frequent secondary disasters, earthquake rescue has the characteristics of time emergency and difficulty.With the development of science and technology, there are rescue robots that can be used in earthquake rescue. Because the earthquake rescue robot can carry out the rescue task continuously, instead of the rescue personnel to go deep into the dangerous environment, it can carry the corresponding tools to go deep into the ruins environment for rescue. However, there are still some problems in the rescue robot, such as the impact of the earthquake ruins environment, the operation mode does not match the rescue needs, and the rescue efficiency is not ideal.This paper mainly uses the methods of literature, analysis and comparative research. The purpose of the research is to solve the problems that the complex earthquake ruins environment affects the use of rescue robots, the operation mode does not match the rescue needs, and the rescue efficiency of rescue robots is not ideal. Based on the related technology and research results of rescue robot, a new type of earthquake rescue robot is designed and researched.Through investigation and analysis, we put forward the design requirements of the earthquake rescue robot, including all terrain passing, multi-functional tools, lightweight fuselage, model systematization and appearance discrimination design requirements. Through the in-depth analysis and research of these design requirements, combined with the design principles of the earthquake rescue robot, we can know that the earthquake rescue robot meeting these requirements can better adapt to the ruins environment, and also can improve the rescue efficiency is not ideal. Finally, according to the design requirements, design principles and related contents of earthquake rescue, the specific solution design is carried out.Key words earthquake disaster; rescue; ruins environment; trapped people; robot目 录摘要 (I)Abstract (II)第1章绪论 (1)1.1 论文的研究背景 (1)1.1.1 研究背景 (1)1.1.2 研究目的及意义 (2)1.2 国内外研究现状 (3)1.2.1 国内研究现状 (4)1.2.2 国外研究现状 (4)1.3 研究内容 (6)1.4 论文框架图 (7)第2章被困人员与废墟环境状况 (9)2.1 被困人员状况 (9)2.1.1 被困人员伤病状况 (9)2.1.2 被困人员心理状况 (11)2.2 废墟环境状况 (11)2.2.1 外部废墟状况 (12)2.2.2 存活空间状况 (15)2.3 本章小结 (17)第3章地震救援机器人设计要求分析 (19)3.1 全地形通过设计要求 (20)3.2 工具多功能设计要求 (22)3.3 机身轻量化设计要求 (25)3.4 型号体系化设计要求 (28)3.5 外观辨别化设计要求 (30)3.6 本章小结 (32)第4章地震救援机器人设计原则 (35)4.1 可靠性设计原则 (35)4.1.1 动力装置的可靠性 (36)4.1.2 行走装置的可靠性 (37)4.2 标准化设计原则 (37)4.2.1 型号的标准化 (38)4.2.2 运输的标准化 (38)4.3 创新性设计原则 (40)4.3.1 工具的创新性 (40)4.3.2 结构的创新性 (41)4.4 本章小结 (42)第5章地震救援机器人设计实践 (43)5.1 行走模块设计 (43)5.2 工具模块设计 (45)5.3 主机模块设计 (47)5.4 机身材料使用 (48)5.5 外观颜色设计 (48)5.6 机器人图解 (50)5.7 设计说明 (51)结论 (55)参考文献 (57)攻读硕士学位期间所发表的论文 (61)致谢 (63)第1章绪论1.1 论文的研究背景1.1.1 研究背景我国是世界上地震灾害频繁发生的国家之一,地处欧亚板块的东南部,因受印度洋板块、太平洋板块的相互作用和影响,所以地震灾害相对活跃[1]。
地震搜救机器人装备开发研制历程概述

1 旋翼空中搜索机器人和废墟洞穴可变形机器人在芦山地震救援中国际上的机器人学者从应用环境出发将机器人分为两类:制造环境下的工业机器人和非制造环境下的服务与仿人型机器人。
我国机器人专家基本认同这种分类方法,将机器人分为工业机器人和特种机器人。
特种机器人是除工业机器人之外的、在美国俄克拉荷马州的阿尔弗德联邦大楼爆炸案,揭开了救援机器人技术研究的序幕。
2001年美国9.11 事件,美国机器人辅助救援中心和其他一些单位的救援机器人第一次配合救援人员参与了救援行动,有几十个救援机器人替代救援人员进入世贸大楼搜索幸存者被轰然倒塌的废墟压埋,被认为是救援机器人的第一次实际应用。
救援机器人在重大突发事件救援中替代人类进入到危险环境搜寻救援的优势和作用第一次得到显现,鉴于此西方许多发达国家竞相开展了救援机器人技术研究。
2地震搜救机器人灾害救援机器人衍生于军用机器人。
地震搜救机器人是灾害搜救机器人中的一分子。
由于地震小概率事件,因此地震搜救机器人在灾害救援机器人中属于小众中的小众。
2.1地震搜救机器人发展历程我国救援机器人研究肇始于2007年国家863计划首次支持的第一个“救灾救援危险作业机器人技术研究” 重点项目,在这个项目中包含了中国地震应急搜救中心(以下简称搜救中心)牵头的“地震废墟搜索与辅助救援机器人研制”课题,开启了中国地震辅助救援机器人研究的新篇章。
经过十年的努力,搜救中心与中国科学院沈阳自动化研究所国家机器人学重点实验室、哈尔滨工业大学国家机器人重点实验室、中科院合肥物质科学研究院、北京航空航天大学、北京理工大学、北京工业大学、哈尔滨工业大学、上海大学、天津大学、山东大学、大连理工大学等众多科研院所优势互补,形成了以搜救中心为枢纽核心,与国内相关科研院所多个机器人技术团队强强联合的我国地震辅助搜救机器人领域的开发研究与示范应用体系。
十年来从无到有,初步建立了搜索类、营救类、助力类、快速与大型机器类对接的智能救援属具类和地震搜救机器人功能综合测试评价技术的地震搜救机器人体系。
灾难救援机器人制作方案
灾难救援机器人制作方案
近年来地震、矿难频繁发生,带来了无数的灾难,许多无辜的人失去了宝贵的生命,许多幸福的家庭,也因此失去了原有的快乐。
作为新世纪的我们深表痛心,我们想到了借助高科技,利用机器人来救援那些被废墟深埋的人们。
让那些需要救援的人们得到及时的救助由此我们机器人协会拟定了一套救援机器人的制造方案一、设计目的
设计一种机器人,能在废墟,夹缝中进行道路探索和环境的扫描中,在弯曲处自动控制转弯,可以防尘、防水、防毒,对于那些发热及有生命现象的东西,具有很好的灵敏性。
从而起到能对受困的人进行及时的支援和救助
一、设计目的
设计一种机器人,能在废墟,夹缝中进行道路探索和环境的扫描中,在弯曲处自动控制转弯,可以防尘、防水、防毒,对于那些发热及有生命现象的东西,具有很好的灵敏性。
从而起到能对受困的人进行及时的支援和救助。
二、方案设计
1、方案说明:
a、本方案履带式结构,根据昆虫仿生运动结构,可以越过沟渠,废墟等障
碍物,同时可以对深埋地下的矿产进行扫描探索开采和对伤员进行食物以及水的运输。
b、前面、后面部分都有动力装置,可以更好的前进和倒退,同时可以提供
足够的动力防止打滑。
在前面和后面都有转向轴,是整个装置更加灵活轻捷。
中间连杆可以控制前、后两部分的高低还有距离能起到连接和传递动力的作用
2、方案图解。
救援机器人结构设计

救援机器人结构设计
一、概述
救援机器人是一种新型机器人,可用于识别地面、水下、空间和低能
区的危险环境,搜寻受困者并发信号,以及搜救和援助受困者等搜救作业。
由于灾害环境特殊,安全性要求高,因此救援机器人结构应具有良好的稳
定性和兼容性,以满足复杂的技术要求。
二、结构设计
(一)结构设计
1.机体结构:救援机器人机体结构采用双节轴膨胀铰接架构,其特点
是结构稳定、不易损坏;机体上设有传感器持续监测前方环境,保证机器
人稳定行驶;机体重心低,采用悬挂式底盘,可有效降低耦合系数,提高
稳定性。
2.推进系统:救援机器人可以采用轮子驱动系统,可在平地、坡道、
河流和其他不规则地形中行驶,具有很强的稳定性;采用爪状车轮可以增
强机器人的抓地力,有效减少滑动;还可以根据不同环境采用飞机、直升
飞机和无人机等飞行器,用于高空救援。
3.传感器:救援机器人配备有多道传感器,包括激光雷达、摄像头、
激光距离传感器、超声波测距仪、红外传感器和全息摄像头等,可以实时
监测周围环境。
六轮式多功能智能抢险机器人的设计

六轮式多功能智能抢险机器人的设计随着科技的不断进步与发展,人类开始逐渐把越来越多的工作交给智能机器人来完成。
在抢险救灾等紧急情况下,智能机器人更是具有无可比拟的优势。
为了更好地应对各种抢险救灾任务,设计一款兼具灵活性、多功能性、智能化的六轮式多功能智能抢险机器人,无疑能够为人们的生命和财产安全提供更有效的保障。
一、机器人的外观设计六轮式多功能智能抢险机器人的外观设计应该符合人体工程学和实际抢险救灾需求。
机器人整体应该具备轻巧灵活的特点,外壳材料应该采用坚固耐用的复合材料制作,具备一定的防水、防尘性能。
外形设计应该圆滑流线型,避免因为尖锐边角而导致的损坏或卡顿等问题。
机器人的尺寸要适中,可以在狭窄的环境下自如穿行,对于紧急情况的救援和搜救任务具有明显的优势。
二、机器人的主要功能1. 执行搜索与搜救任务:机器人配备高清晰度摄像头及红外线摄像头,搭载红外线扫描仪和超声波平台,能够在夜间或者低能见度环境下完成搜索和搜救任务,并且可以实现远程遥控。
2. 执行救援任务:机器人配备两个机械臂,具有抓取、搬运和拉扯等功能,能够协助人类救援人员完成抢险救灾任务。
3. 执行信息搜集与传输任务:机器人配备各种传感器,能够实时采集环境信息,并且配有无线通信设备,能够将搜集到的信息传输至指挥中心。
4. 自主导航任务:机器人搭载高精度定位系统,能够自主完成复杂的室内外环境的导航任务,提高工作效率。
5. 执行临时电源供应任务:机器人配备高容量可充电锂电池,能够为受灾地区提供一定的电力供应,满足紧急情况下的供电需求。
三、机器人的智能控制为了能够更好地满足复杂多变的抢险救灾任务需求,六轮式多功能智能抢险机器人应该配备高效智能的控制系统。
控制系统应该具备人机交互界面,具有图像识别、语音识别和手势识别等功能,能够实现人机远程交互。
控制系统应该具备自主学习和自主规划的能力,能够根据任务需求和环境变化自主调整行动方案,并且有一定的自我维护和自我修复能力,以提高机器人的稳定性和可靠性。
地震救援机器人设计说明书
地震救援设计说明书地震救援设计说明书1. 引言1.1 目的本文档旨在提供地震救援的设计说明,以指导设计团队在开发地震救援时的工作。
1.2 范围本文档涵盖了地震救援的设计概念、结构、功能、性能要求、控制系统、通信系统、电力系统、机械系统等方面的内容。
2. 设计概念2.1 多功能性地震救援应具备多种功能,如探测受困人员、运送救援物资、提供紧急救护等。
2.2 高灵活性地震救援应具备良好的机动性和适应性,能够在复杂的地震环境中自由移动和工作。
2.3 高稳定性地震救援应具备稳定的结构和平衡系统,以应对地震环境的不稳定性。
3. 结构设计3.1 框架地震救援的框架应采用轻量化的材料,如碳纤维复合材料,以提高的机动性。
3.2 运动系统地震救援应配备足够的运动轮和驱动装置,以保证其在不平坦的地震场地上能够稳定移动。
3.3 传感器系统地震救援应搭载各种传感器,如摄像头、红外线传感器、气体传感器等,以实时探测受困人员和危险环境。
3.4 操作系统地震救援应配备智能操作系统,能够根据环境和任务要求做出自主决策和行动。
4. 功能设计4.1 人员搜索与定位功能地震救援应能够通过传感器探测受困人员的位置,并在地震场地中准确定位受困人员的位置。
4.2 物资运输功能地震救援应具备搬运和运输救援物资的能力,以满足救援需求。
4.3 紧急救护功能地震救援应配备基本的急救设备,如急救箱、心电图仪等,能够对受伤或生命体征不稳定的人员进行紧急救护。
5. 性能要求5.1 最大移动速度地震救援的最大移动速度应满足紧急救援的需要,同时考虑到稳定性的要求。
5.2 工作时间地震救援的电力系统应能够支持长时间的工作,以保证救援任务的顺利进行。
5.3 载重能力地震救援的载重能力应能够满足运送救援物资的需求,同时考虑灵活性的要求。
6. 控制系统设计6.1 远程控制地震救援应具备远程控制功能,以便操作人员对其进行远程操控和指导。
6.2 自主控制地震救援应具备自主控制功能,能够根据环境和任务要求做出自主决策和行动。
救援机器人毕业设计

救援机器人毕业设计
随着自然灾害和人为事故的频繁发生,救援机器人逐渐成为重要的援助工具。
本篇毕业设计旨在设计一种多功能的救援机器人,以便在各种紧急情况下提供必要的援助。
设计思路:
1. 结构设计:
救援机器人的结构需要面对各种不同的环境,包括火灾、地震、洪水等。
因此,它的结构需要具有耐高温、防水、防震等特性。
机器人装备有多个机械臂,能够在不同的场景下进行有效的操作,例如搜寻被困者、拯救伤员等。
2. 传感器设计:
救援机器人装配有多种传感器,包括温度传感器、气体传感器、声音传感器等。
这些传感器能够帮助机器人辨识出各种环境中的问题,并提供相关的信息。
例如,在火灾中,机器人可以利用传感器来检测房屋内的温度和任何潜在的危险。
3. 程序设计:
机器人需要具有一定的智能,能够根据环境的变化做出正确的反应。
机器人配备了多个算法,例如对象检测、运动规划等,能够在不同的场景下做出正确的决策。
4. 发电机:
机器人配备了太阳能发电机,以保证在没有电力供应的情况下,机器人仍能正常运作。
此外,机器人还配备了备用电池,以提供额外的能量储备。
结论:
在救援工作中,救援机器人可以发挥重要作用。
设计一种多功能的救援机器人,能够帮助消防员、医生等工作人员有效地解决紧急情况下的问题。
在未来,随着技术的发展,救援机器人将会变得更加先进和智能化。
灾害救援机器人设计方案
灾害救援机器人设计方案一、设计要求设计一具有独立前进、转弯、后退、避障、救人等功能的救援机器人。
二、设计任务1.电子控制组:设计好控制电路及原理图,各类传感器电路及稳压电源,并制作成独立模块,按程序要求进行调试(超声波、雷达和红外线传感器的感应距离)。
2.机械设计组:设计机器人各部分结构(包括机械手、身躯、底盘)以及各类传感器模块的安装。
3.程序设计组:按照具体设计要求进行编程及调试、烧录等工作。
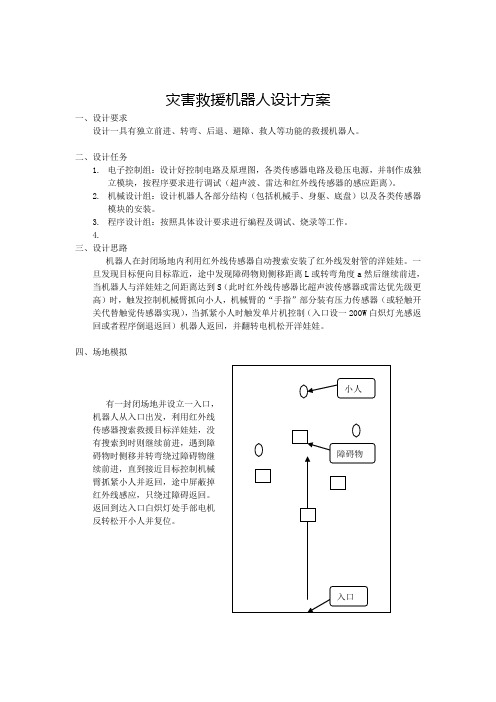
4.三、设计思路机器人在封闭场地内利用红外线传感器自动搜索安装了红外线发射管的洋娃娃。
一旦发现目标便向目标靠近,途中发现障碍物则侧移距离L或转弯角度a然后继续前进,当机器人与洋娃娃之间距离达到S(此时红外线传感器比超声波传感器或雷达优先级更高)时,触发控制机械臂抓向小人,机械臂的“手指”部分装有压力传感器(或轻触开关代替触觉传感器实现),当抓紧小人时触发单片机控制(入口设一200W白炽灯光感返回或者程序倒退返回)机器人返回,并翻转电机松开洋娃娃。
四、场地模拟有一封闭场地并设立一入口,机器人从入口出发,利用红外线传感器搜索救援目标洋娃娃,没有搜索到时则继续前进,遇到障碍物时侧移并转弯绕过障碍物继续前进,直到接近目标控制机械臂抓紧小人并返回,途中屏蔽掉红外线感应,只绕过障碍返回。
返回到达入口白炽灯处手部电机反转松开小人并复位。
五、机器人运作流程图:六、电路模块设计1.超声波发射电路:2.超声波接收电路:3.红外线发射电路:4.红外线接受电路5.直流电机的驱动电路6. 5V与12V直流电源电路7.压力或触觉传感器8. 步进电机驱动电路(1):步进电机驱动电路(2)七、红外线搜索方案原理场地内洋娃娃身上的红外线发射头发射的红外线被机器人身上一个接收头接受到,如果这个接收头不是正前方的接收头(蓝色框表示),假设它被右方的接收头接收到,则触发单片机控制底盘步进电机右转(2个相对步进电机同向同速转动带动2个车轮一正转一反转,可实现机器人原地转向),直到正前方的接收头接收到红外线后就触发单片机控制机器人向目标前进。
机井救援机器人的设计

机井救援机器人的设计机井救援机器人广泛应用于地震、火灾、爆炸和其他危险环境的救援和搜救任务中。
相比人力,机器人在搜救效率、安全性、可靠性等方面都有显著优势。
本文将介绍一种机井救援机器人的设计,该机器人能够在井道中搜救被困人员。
机井救援机器人的机构由下面几部分组成:1.1 底盘和轮组底盘是机器人最底部的部分,其主要作用是支撑机器人的上部构件。
轮组由四个橡胶轮组成,轮子与底盘通过减震系统连接,具有减震和适应不同地形的功能。
1.2机器人笛子机构机器人笛子机构分为上、下两部分。
下部通过一系列齿轮和链条将电动机的动力传递到笛子,上部将笛子嵌入机器人的导向管内,用于传输救援信号。
当机器人进入井道时,上、下两部分笛子机构会自动分离以避免笛子损坏。
1.3机器人传感器机器人配备多种传感器,包括红外传感器、气体传感器和触觉传感器。
这些传感器用于检测环境中的障碍物、检测可燃气体浓度和监测机器人所在的位置。
2. 机器人的动力设计机井救援机器人采用电动驱动,运用锂电池作为动力来源。
2.1电机驱动机器人的推进由差速驱动实现,差速驱动采用两个马达驱动两条前轮的过程中,使得左右两边的轮子速度有所差别,从而实现转向而不影响推进。
2.2电池电器设计机器人采用锂离子电池作为动力供应,以其高能量密度、轻量和长寿命的特点。
机器人还配备了电池保护电路,以防止过充和过放,并防止短路和过电流。
3.1微控制器单元微控制器单元负责监控机器人的传感器和执行器,以及指挥机器人的动作和反应。
3.2数据通信模块机器人配备了WIFI数据传输技术,可以通过无线网络实时将机器人发现的人员和相关信息传输给安全救援人员。
3.3遥控当机器人无法自主地完成任务时,可以通过遥控器控制机器人。
遥控器也可以用于测试和调试机器人的功能和性能。
4. 总结本文介绍了一种机井救援机器人的设计,该机器人具有高效、安全和可靠的特点。
该机器人还采用了多种传感器,并配备了电池保护电路和WIFI数据传输技术。
地震救援机器人设计及制作

引言
项目简介
技术方案
《地震救援机器人的设计与制作》
总结
技术方案 机器人整体前进
引言
项目简介
技术方案
《地震救援机器人的设计与制作》
总结
技术方案
清除障碍过程
机器人初始化过程中,启动气泵电机,控制电磁阀的动作,气缸系统完成挖 掘机械手的初始化。 在前移过程中,通过 程序控制气缸系统中 的电磁阀,让机器人 的挖掘机械手可以在 前进中保持稳定。
引言
项目简介
技术方案
《地震救援机器人的设计与制作》
总结
总结
❖ 地震救援机器人是针对全国各个地震多发区(例如云南的几条地震带)的灾后救援难题进行 设计的,在机器人模块组合合理和控制系统稳定的情况下,可以实现复杂灾后环境的道路清 理及救援工作。
引言
作品简介
技术方案
《地震救援机器人的设计与制作》
总结
地震救援机器人的设计与制作
引言
项目简介
技术方案
《地震救援机器人的设计与制作》
总结
技术方案
地震救援机器人的设计与制作
本项目所设计的机器人以开辟救援通路为主要任务,当其进入工作区域后开启清除障碍功能。 我们充分利用学院慧鱼实验室内的慧鱼器件,搭建了整个救援机器人的机械结构,并利用慧鱼 开发板完成了机器人的自动化控制。我们对项目申请时的预定方案进行了优化改进,救援机器 人的整个运动过程由原来的腿部前移、主体前移和清理障碍三个过程精简化为机器人整体前进 和遇到障碍后停下来清除障碍两个过程。
引言
设计 总结
引言 v 现如今,随着自然灾害和各种突发事故发生的越来越多,在灾难救援过程中,救援人员
和救援设备通往灾区的道路并不顺畅,经常被堵在路途中,耽误了不少黄金救援时间。 在这种紧急而危险的情况下,急需要一种救援机器人为救援人员和设备开辟救援通道。
一种多功能搜救机器人的设计
一种多功能搜救机器人的设计在当今社会,各种自然灾害和人为事故时有发生,如地震、火灾、矿难等。
在这些紧急情况下,及时有效的搜救工作至关重要,它关系到被困人员的生命安全。
然而,由于灾害现场环境复杂、危险,给搜救工作带来了极大的困难。
为了提高搜救效率和安全性,设计一种多功能搜救机器人具有重要的现实意义。
一、设计背景在面对重大灾害和紧急情况时,传统的搜救方法往往存在诸多局限性。
例如,救援人员在进入危险区域时可能面临生命威胁,而且人类的感官和体能在恶劣环境下也会受到很大限制,难以全面、快速地搜索到被困人员。
此外,一些灾害现场可能存在有毒气体、高温、浓烟等危险因素,进一步增加了搜救的难度。
为了克服这些困难,利用先进的技术手段开发一种能够适应复杂环境、高效执行搜救任务的机器人成为了迫切的需求。
这种多功能搜救机器人应具备自主导航、环境感知、生命探测、通信联络等功能,能够在危险环境中代替或协助救援人员进行工作,提高搜救的成功率和效率。
二、功能需求1、自主导航机器人需要能够在未知环境中自主行走,避开障碍物,规划最优路径。
这就要求它具备先进的传感器系统,如激光雷达、摄像头、超声波传感器等,以实时感知周围环境,并通过算法进行路径规划和决策。
2、环境感知能够对灾害现场的温度、湿度、气体浓度等环境参数进行检测,为救援人员提供重要的环境信息。
同时,还应具备对废墟结构、地形地貌等的感知能力,以便更好地评估危险程度和制定搜救策略。
3、生命探测具备多种生命探测技术,如热成像、声音检测、心跳检测等,能够快速准确地发现被困人员的位置和生命体征。
4、通信联络与指挥中心和救援人员保持稳定的通信,实时传输搜救数据和图像,以便指挥人员做出决策。
5、机械操作能够执行一些简单的机械操作,如搬运障碍物、打开门窗等,为救援工作创造有利条件。
三、机械结构设计1、机身采用坚固耐用的材料制造,如铝合金或碳纤维,以保证在恶劣环境下的稳定性和可靠性。
机身设计应具备良好的防护性能,能够抵御冲击、碰撞和恶劣的气候条件。
多功能救援机器人机构设计与机架制作

口 曾 欣 口 李 恩 田
6 4 4 0 0 3 宜 宾 职 业 技 术 学 院 现 代 制 造 工 程 系 四 川宜 宾
摘
要: 对 用 于 地震 灾 害救 援 的 多功 能救 援 机 器人 , 进 行 机 构 设 计 与 机 架制 作 探 讨 。 通过 对 机 器人 机 身 杆件 的 自由度
l 弹簧导柱与控制系 I { 统箱体采用粘接方 l ; 式连接 I
控制系统箱体
三
减振弹簧
蕊 主 1 赫 鬈 勃弹 % / … 簧 ’ 导 柱
▲ 图 6 理 论 极 限 越 障 姿 态
=
▲ 图 7 弹 簧 减 振 结 构 图
▲ 图 8 机 身 运 动 受 力 图
( c o s / 3 ) / 2 - d s i n
( 3 )
式 ( 3 ) 一 式 ( 2 ) 得 :
( C O S / 3 ) / 2 一( d + a ) s i n 一[ e c o s (  ̄ ) ] / 2 - r = O
同时还 可 以得 到 :
( 4 )
具 下 面 主 要 介 绍 对 该 机 器 人 的 机 构 设 计 与 机 架 制 作 的分 析 和 实 践
1 机 构 设 计
通 过 平 面 四杆 机 构 的 优 缺 点 总 结 . 将 其 利 用 于 多 功 能 机 器 人 机 构 的 设 计 与 研 究 1 . 1 机 构 自由 度 计 算 根 据 平 面 四 杆 机 构 的 基 本 特 性 与 运 动 机 构 的 运
=3×3—2×4—0= l
子 P I 遇 到 障 碍 物 以
地震救援机器人设计说明书
地震救援机器人设计说明书参赛单位:华北科技学院作者:孙浩然梁陈赞冯忠豪刘俊指导教师: 田忠友王海鹏目录一.作品简介 (1)二.主要功能指标 (2)三.工作原理 (4)四.运动分析 (5)4.1腿部移动过程 (5)4.2主题迁移过程 (6)五.动力分析 (8)5.1 单独由电机提供动力 (8)5.2 由气缸和电机共同提供动力 (9)六.实用化的可能 (11)七.市场前景 (13)八.作品外形照片 (14)九.参考文献 (16)一.作品简介该作品是基于地震救灾为背景而设计研发的,是一种能够起清障作用、标记事故地点、探索救援道路的先进设备。
该作品具有灵活、操作简便、适用性强、拓展功能多的特点,非常适用于救灾抢险工作。
高度智能化和自动化是本作品的又一大特点,也是具备强势竞争力的一大优势。
同时,采用了先进的控制系统和算法,是系统的通用性和适用性进一步增强,能够出色完成各项任务。
本作品由中心搭载平台,四条安装在平台四角的机械腿,中部的两部液压支架以及构建在平台上的挖掘装置组成。
机械腿由关节电机带动实现腿部移动,由安装其上的蜗杆装置实现腿部伸缩,四条腿依次移动后再次转动电机实现机械本体的整体前进。
达到预定位置后平台上的气泵开始工作,带动整个装置的升降掘进,起到了除障清路的作用。
同时腿部结构设计比较先进,使机械体具有一定的越障能力,摆脱了传统救灾设备行动能力不足的缺陷,对灾区环境有很强的适应能力。
双模的行进机构使得系统灵活性和机动力极大增强。
轮式行进可使机器人快速机动,灵活部署;机械腿行进可使机器人工作平稳,深入灾区。
采用双模互换的行进方式既能节省宝贵时间,又能提高工作效率,同时兼具节能的特点。
二.主要功能指标该机器人是着眼于地震灾区的各类救援任务而开发的,其独树一帜的外形设计和结构设计使其能够遂行地震灾区的各种搜救、援助、运输、支承等任务。
首先,通过加装红外感应器材和探人雷达等仪器设备,使其能够在较大范围内执行地震灾区的搜救任务,机器人的中心搭载平台采用模块化设计,可以根据实际需要即时更换设备进行搜救工作。
地震救援机器人设计说明书资料

地震救援机器人设计说明书参赛单位:华北科技学院作者:孙浩然梁陈赞冯忠豪刘俊指导教师: 田忠友王海鹏目录一.作品简介 (1)二.主要功能指标 (2)三.工作原理 (4)四.运动分析 (5)4.1腿部移动过程 (5)4.2主题迁移过程 (6)五.动力分析 (8)5.1 单独由电机提供动力 (8)5.2 由气缸和电机共同提供动力 (9)六.实用化的可能 (11)七.市场前景 (13)八.作品外形照片 (14)九.参考文献 (16)一.作品简介该作品是基于地震救灾为背景而设计研发的,是一种能够起清障作用、标记事故地点、探索救援道路的先进设备。
该作品具有灵活、操作简便、适用性强、拓展功能多的特点,非常适用于救灾抢险工作。
高度智能化和自动化是本作品的又一大特点,也是具备强势竞争力的一大优势。
同时,采用了先进的控制系统和算法,是系统的通用性和适用性进一步增强,能够出色完成各项任务。
本作品由中心搭载平台,四条安装在平台四角的机械腿,中部的两部液压支架以及构建在平台上的挖掘装置组成。
机械腿由关节电机带动实现腿部移动,由安装其上的蜗杆装置实现腿部伸缩,四条腿依次移动后再次转动电机实现机械本体的整体前进。
达到预定位置后平台上的气泵开始工作,带动整个装置的升降掘进,起到了除障清路的作用。
同时腿部结构设计比较先进,使机械体具有一定的越障能力,摆脱了传统救灾设备行动能力不足的缺陷,对灾区环境有很强的适应能力。
双模的行进机构使得系统灵活性和机动力极大增强。
轮式行进可使机器人快速机动,灵活部署;机械腿行进可使机器人工作平稳,深入灾区。
采用双模互换的行进方式既能节省宝贵时间,又能提高工作效率,同时兼具节能的特点。
二.主要功能指标该机器人是着眼于地震灾区的各类救援任务而开发的,其独树一帜的外形设计和结构设计使其能够遂行地震灾区的各种搜救、援助、运输、支承等任务。
首先,通过加装红外感应器材和探人雷达等仪器设备,使其能够在较大范围内执行地震灾区的搜救任务,机器人的中心搭载平台采用模块化设计,可以根据实际需要即时更换设备进行搜救工作。
震后救援机器人结构设计

可根 据 需 要 随 时 调 整 ,可 以 提 高机 器 人 的 复 杂 地
面 通过 能 力 。
机 器 人 复 杂 环 境 的 稳 定 行 进 。变 距 结构 中驱 动 电
ቤተ መጻሕፍቲ ባይዱ
收稿日期:2 0 1 3 - 0 1 -1 7 基 金项目:浙江省大学生科技创新项 目:灾后救援机 器人 行走 机构及物 资供给机构研制 ( 2 0 1 2 R 4 2 2 0 1 1 ) 作者简介:刘建君 ( 1 9 9 2 一),山东人 ,本 科生 ,研 究方向为机械制造及其 自动化 。 .
五趾 骨 部位 和 右 脚 跟 部位 处 的 压 力 传 感器 压 力 值 变 化 变 量 。在 表 中 1 — 6 列 中 ,变 量 输 出 ‘ 0 ’表 示 压 力值减 小 ; ‘ 1 ’表 示 压 力 值 增 大 ; Nu 1 1 ’ 表 示 该 部位 压 力值 无 明 显 变化 。第 7 列中, ‘ l e g — a n g l e ’代 表 左髋 关节 与 右髋 关 节运 动 状态 , ‘ 1 ’ 表 示 左大 腿 在 右大 腿 前 方或 处 于 两腿 平 行 ; ‘ 0 ’ 表 示左 大 腿在 右大 腿 后方 。Ga i t 变 量为 当前 程 序检 测 步 态 的返 回编 码 值 ; 第9 列 为 各 个编 码 代 表 的行
2 和r i g h t一 3 分 别 为 右 脚 第 一 趾 骨 部 位 、 第
行 走 中脚 底 压 力 和 关 节 角 度 信 号变 化 ,确 定 当前
人 体 行 走 状 态 。通 过 试 验 证 明 该 系统 可 以实 时 检 测 到 人 体 行 走 中体 行 走 中脚 底压 力和 关 节 角 度 信 息 , 并 能 识 别人 体 当 前 行走 步 态 ,为 下 肢 外 骨 骼 机 器 人 行 走控 制 系统 分 析 设 计 提 供 参 考 ,进 而 为 今 后下肢 外骨 骼机 器人 的研 究 打下基 础 。
地震救援机器人的制作技术
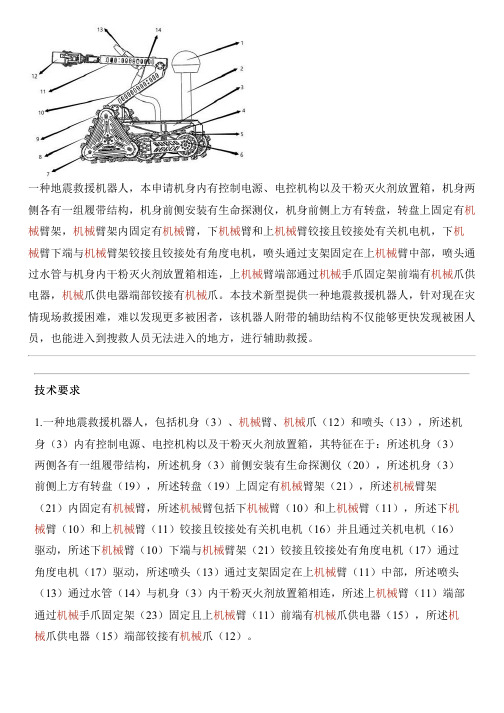
一种地震救援机器人,本申请机身内有控制电源、电控机构以及干粉灭火剂放置箱,机身两侧各有一组履带结构,机身前侧安装有生命探测仪,机身前侧上方有转盘,转盘上固定有机械臂架,机械臂架内固定有机械臂,下机械臂和上机械臂铰接且铰接处有关机电机,下机械臂下端与机械臂架铰接且铰接处有角度电机,喷头通过支架固定在上机械臂中部,喷头通过水管与机身内干粉灭火剂放置箱相连,上机械臂端部通过机械手爪固定架前端有机械爪供电器,机械爪供电器端部铰接有机械爪。
本技术新型提供一种地震救援机器人,针对现在灾情现场救援困难,难以发现更多被困者,该机器人附带的辅助结构不仅能够更快发现被困人员,也能进入到搜救人员无法进入的地方,进行辅助救援。
技术要求1.一种地震救援机器人,包括机身(3)、机械臂、机械爪(12)和喷头(13),所述机身(3)内有控制电源、电控机构以及干粉灭火剂放置箱,其特征在于:所述机身(3)两侧各有一组履带结构,所述机身(3)前侧安装有生命探测仪(20),所述机身(3)前侧上方有转盘(19),所述转盘(19)上固定有机械臂架(21),所述机械臂架(21)内固定有机械臂,所述机械臂包括下机械臂(10)和上机械臂(11),所述下机械臂(10)和上机械臂(11)铰接且铰接处有关机电机(16)并且通过关机电机(16)驱动,所述下机械臂(10)下端与机械臂架(21)铰接且铰接处有角度电机(17)通过角度电机(17)驱动,所述喷头(13)通过支架固定在上机械臂(11)中部,所述喷头(13)通过水管(14)与机身(3)内干粉灭火剂放置箱相连,所述上机械臂(11)端部通过机械手爪固定架(23)固定且上机械臂(11)前端有机械爪供电器(15),所述机械爪供电器(15)端部铰接有机械爪(12)。
2.根据权利要求1所述的一种地震救援机器人,其特征在于:每组履带结构有一个前部结构和一个后部结构,所述前部结构包括三角连接架(7)、前部履带(8)和前部履带盘(9),所述三角连接架(7)的角处安装有前部履带盘(9),所述前部履带(8)绕在三个前部履带盘(9)上,所述后部结构包括后部履带(4)、后部履带盘(5)和履带盘连接架(6),所述履带盘连接架(6)两端各有一个后部履带盘(5),所述后部履带(4)绕在两个后部履带盘(5)上。
可变位履带式地震废墟搜救机器人的设计

图 2 爬坡过程示意图
3 搜救机器人控制系统的硬件组成 根据地震废墟搜救机器人的结构和功能 ,设计出
搜救机器人爬坡过程示意图如图 2 所示 。 由受力 平衡条件得知 ,机器人重心位于 G 处 ,后轮履带与坡 的接触点为 B 点 。 当机器人的重心作用线不超过 B 点时不会发生颠覆 ,因此该搜救机器人能够爬越的最 大坡角 θ= arctan(d/h) 。
图 3 搜救机器人控制系统结构框图
图 4 可变位履带式地震废墟搜救机器人 3D 模型
摘要 : 针对地震后搜救遇到的问题 , 设计了一款可变位履带式地震废墟搜救机器人 。 首先分析和验证了可变 位履带式机器人的结构特点和可行性 , 然后对机器人的控制系统硬件组成进行了架构 , 在此基础上通过 Pro /E 软件对机器人进行了三维实体建模和整机运动仿真 。 仿真结果表明了可变位履带式地震废墟搜救机器 人运动方式多样 , 满足功能要求 , 具有一定的应用价值 。 关键词 : 机器人 ; 地震搜救 ; 履带 ; 结构设计 ; 运动仿真 中图分类号 : T P242畅 3 文献标识码 : A
2013 年第 4 期 尚满喜 :可变位履带式地震废墟搜救机器人的设计
· 93 ·
前端从动轮的高度达到障碍物高度时 ,此时为搜救机 器人跨越障碍的临界抬臂高度 。 受搜救机器人整体尺 寸的限制 ,前臂最大仰角为 35° ,臂长为 100 mm ,故该 机器人上坡时越障高度为 H = 100sin35° ≈ 57 mm ,能 满足一般震后现场废墟的越障要求 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
机器人整体前进 当机器人收到预定指令准备向前移时。分布在机器人左 右两侧腿部的两个接触传感器进行初始状态检测。检测 完成后,机器人一侧的三条机械腿开始工作。由于三 条腿在伸缩过程中 不是同步着地的, 因而机器人在向前 移动过程中具备一 定的越障能力。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
引言
4月25日14时11分在尼泊尔发生8.1级地震,震源 深度20千米。地震导致公路中断,救援通道阻塞。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
引言
明 德 任 责 致 知 力 行源自明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
机器人整体前进 机器人行走第一步:通过一侧的三条腿各自提升,由电 机带动齿轮旋转,三条机械腿上提、下降过程中向前移 动至最大步幅,同时这侧的接触传感器动作,三条腿停 下来。 随后另一侧的三条腿重复上面第一步的运动过程。两侧 机械腿循环运动,完成机器人的向前移动。
明 德 任 责 致 知 力 行
引言
作品简介
技术方案
总结
《地震救援机器人的设计与制作》
地震救援机器人的设计与制作
明 德 任 责 致 知 力 行
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
机器人整体前进
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
清除障碍过程
明 德 任 责 致 知 力 行
机器人初始化过程中,启动气泵电机,控制电磁阀的动 作,气缸系统完成挖 掘机械手的初始化。 在前移过程中,通过 程序控制气缸系统中 的电磁阀,让机器人 的挖掘机械手可以在 前进中保持稳定。
技术方案
地震救援机器人演示视频
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
总结
地震救援机器人是针对全国各个地震多发区(例如云 南的几条地震带)的灾后救援难题进行设计的,在机 器人模块组合合理和控制系统稳定的情况下,可以实 现复杂灾后环境的道路清理及救援工作。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
项目简介
该机器人具有动作灵活、操作简单、适用性强、 拓展功能多等特点,非常适用于抢险救灾工作。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
地震救援机器人的设计与制作 本项目所设计的机器人以开辟救援通路为主要任务,当 其进入工作区域后开启清除障碍功能。我们充分利用学 院慧鱼实验室内的慧鱼器件,搭建了整个救援机器人的 机械结构,并利用慧鱼开发板完成了机器人的自动化控 制。我们对项目申请时的预定方案进行了优化改进,救 援机器人的整个运动过程由原来的腿部前移、主体前移 和清理障碍三个过程精简化为机器人整体前进和遇到障 碍后停下来清除障碍两个过程。
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
技术方案
清除障碍过程 机器人到达障碍处之后,程序就使机器人腿部移动动作 结束,挖掘机械手调整到工作位置,通过控制机械手各 个关节部位气缸的电磁阀来操作挖掘机械手的清除障碍 工作。
明 德 任 责 致 知 力 行
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
地震救援机器人的设计与 德 制作
任 责 致
Kunming University of Science and Technology
Faculty of Mechanical and Electrical Engineering
明
知 力 行
汇 报 人:黄青青 项目成员:黄青青 杨正利 李超 杨帆 指导教师:吴海涛
地震救援机器人的设计与制作
明 德 任 责
项目 简介
设计 方案
引言 总结
致 知 力 行
引言
现如今,随着自然灾害和各种突发事故发生的越来 越多,在灾难救援过程中,救援人员和救援设备通 往灾区的道路并不顺畅,经常被堵在路途中,耽误 了不少黄金救援时间。在这种紧急而危险的情况下 ,急需要一种救援机器人为救援人员和设备开辟救 援通道。
早在1995年日本神户-大阪地震及其后发生在美 国俄克拉荷马州的阿尔弗德联邦大楼爆炸案,揭开 了救援机器人技术研究的序幕。 2001年美国911恐怖袭击中美国机器人辅助救援 中心和其他一些单位的救援机器人参与了救援活动。
引言
项目简介
技术方案
总结
《地震救援机器人的设计与制作》
项目简介
地震救援机器人是基于地震救灾为背景而设计 研发的,是一种能够起清除障碍作用、探索救援道 路的先进设备。