STM32高级定时器死区控制
STM32定时器配置(TIM1、TIM2、TIM3、TIM4、TIM5、TIM8)高级定时。。。
STM32定时器配置(TIM1、TIM2、TIM3、TIM4、TIM5、TIM8)⾼级定时。
⽂章结构:——> ⼀、定时器基本介绍——> ⼆、普通定时器详细介绍TIM2-TIM5——> 三、定时器代码实例⼀、定时器基本介绍之前有⽤过野⽕的学习板上⾯讲解很详细,所以直接上野⽕官⽅的资料吧,作为学习参考笔记发出来⼆、普通定时器详细介绍TIM2-TIM52.1 时钟来源计数器时钟可以由下列时钟源提供:·内部时钟(CK_INT)·外部时钟模式1:外部输⼊脚(TIx)·外部时钟模式2:外部触发输⼊(ETR)·内部触发输⼊(ITRx):使⽤⼀个定时器作为另⼀个定时器的预分频器,如可以配置⼀个定时器Timer1⽽作为另⼀个定时器Timer2的预分频器。
由于今天的学习是最基本的定时功能,所以采⽤内部时钟。
TIM2-TIM5的时钟不是直接来⾃于APB1,⽽是来⾃于输⼊为APB1的⼀个倍频器。
这个倍频器的作⽤是:当APB1的预分频系数为1时,这个倍频器不起作⽤,定时器的时钟频率等于APB1的频率(36MHZ);当APB1的预分频系数为其他数值时(即预分频系数为2、4、8或16),这个倍频器起作⽤,定时器的时钟频率等于APB1的频率的2倍。
{假如APB1预分频为2(变成36MHZ),则定时器TIM2-5的时钟倍频器起作⽤,将变成2倍的APB1(2x36MHZ)将为72MHZ给定时器提供时钟脉冲。
⼀般APB1和APB2的RCC时钟配置放在初始化函数中例如下⾯的void RCC_Configuration(void)配置函数所⽰,将APB1进⾏2分频,导致TIM2时钟变为72MHZ输⼊。
如果是1分频则会是36MHZ输⼊,如果4分频:CKINT=72MHZ/4x2=36MHZ; 8分频:CKINT=72MHZ/8x2=18MHZ;16分频:CKINT=72MHZ/16x2=9MHZ}1//系统时钟初始化配置2void RCC_Configuration(void)3 {4//定义错误状态变量5 ErrorStatus HSEStartUpStatus;6//将RCC寄存器重新设置为默认值7 RCC_DeInit();8//打开外部⾼速时钟晶振9 RCC_HSEConfig(RCC_HSE_ON);10//等待外部⾼速时钟晶振⼯作11 HSEStartUpStatus = RCC_WaitForHSEStartUp();12if(HSEStartUpStatus == SUCCESS)13 {14//设置AHB时钟(HCLK)为系统时钟15 RCC_HCLKConfig(RCC_SYSCLK_Div1);16//设置⾼速AHB时钟(APB2)为HCLK时钟17 RCC_PCLK2Config(RCC_HCLK_Div1);18 //设置低速AHB时钟(APB1)为HCLK的2分频(TIM2-TIM5输⼊TIMxCLK频率将为72MHZ/2x2=72MHZ输⼊)19 RCC_PCLK1Config(RCC_HCLK_Div2);20//设置FLASH代码延时21 FLASH_SetLatency(FLASH_Latency_2);22//使能预取指缓存23 FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);24//设置PLL时钟,为HSE的9倍频 8MHz * 9 = 72MHz25 RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);26//使能PLL27 RCC_PLLCmd(ENABLE);28//等待PLL准备就绪29while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);30//设置PLL为系统时钟源31 RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);32//判断PLL是否是系统时钟33while(RCC_GetSYSCLKSource() != 0x08);34 }35//允许TIM2的时钟36 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);37//允许GPIO的时钟38 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);39 }APB1的分频在STM32_SYSTICK的学习笔记中有详细描述。
STM32TIM高级定时器死区时间的计算

STM32TIM⾼级定时器死区时间的计算STM32 TIM⾼级定时器的互补PWM⽀持插⼊死区时间,本⽂将介绍如何计算以及配置正确的死区时间。
⽂章⽬录什么是死区时间?死区时间主要是在逆变电路中,防⽌⼀个桥臂的上下两个开关器件同时导通,那么会导致电路电流上升,从⽽对系统造成损害。
因为开关元器件的t don tdon和t doff tdoff严格意义并不是相同的。
所以在驱动开关元器件门极的时候需要增加⼀段延时,确保另⼀个开关管完全关断之后再去打开这个开关元器件,这⾥的延时就是需要施加的死区时间。
数据⼿册的参数这⾥看了⼀下NXP的IRF540的数据⼿册,门极开关时间如下所⽰;然后找到相关的t don tdon,t dff tdff,t r tr,t f tf的相关典型参数;t don tdon:门极的开通延迟时间t doff tdoff:门极的关断延迟时间t r tr:门极上升时间t f tf:门极下降时间下⾯是⼀个IGBT的数据⼿册;下图是IGBT的开关属性,同样可以找到t don tdon,t dff tdff,t r tr,t f tf等参数,下⾯计算的时候会⽤到;如何计算合理的死区时间?这⾥⽤t dead tdead表⽰死区时间,因为门极上升和下降时间通常⽐延迟时间⼩很多,所以这⾥可以不⽤考虑它们。
则死区时间满⾜;T dead=[(T doffmax−T donmin)+(T pddmax−T pddmin)]∗1.2Tdead=[(Tdoffmax−Tdonmin)+(Tpddmax−Tpddmin)]∗1.2 T doffmax Tdoffmax:最⼤的关断延迟时间;T donmin Tdonmin:最⼩的开通延迟时间;T pddmax Tpddmax:最⼤的驱动信号传递延迟时间;T pddmin Tpddmin:最⼩的驱动信号传递延迟时间;其中T doffmax Tdoffmax和T donmin Tdonmin正如上⽂所提到的可以元器件的数据⼿册中找到;T pddmax Tpddmax和T pddmin Tpddmin⼀般由驱动器⼚家给出,如果是MCU的IO驱动的话,需要考虑IO的上升时间和下降时间,另外⼀般会加光耦进⾏隔离,这⾥还需要考虑到光耦的开关延时。
STM32高级定时器死区时间设置探究

STM32高级定时器死区时间设置探究一、死区设置位置:决定死区时间设置的位是‘刹车和死区寄存器TIM1->BDTR’中的DTG[7:0],设置范围是0x00~0xff。
二、死区时间设置公式如下:DT为死区持续时间,TDTS为系统时钟周期时长,Tdtg为系统时钟周期时长乘以倍数后的死区设置时间步进值。
在72M的定时器时钟下TDTS=1/72M=13.89ns.所以以第一个公式,死区时间能以13.89ns的步进从0调整到127*13.89ns=1764ns第二个公式则能(64+0)*2*13.89~(64+63)*2*13.89=1777.9ns~3528.88ns换个角度看,就是(128~254)*13.89同理,第三个公式就是3555.84ns~7000.56ns换个角度看,就是(256~504)*13.89第四个公式就是7111.68ns~14001.12ns换个角度看,就是(512~1008)*13.89综上:死区时间就是不同的公式代表不同范围的死区时间设置,这个范围是互不重叠的。
而但是在不同的死区时间范围内死区时间设置步进是不同的。
若某个系统时钟下的死区时间不够,可以通过改变定时器时钟来改变最大死区时间范围。
当根据硬件电路的特性定下死区时间后,可以根据目标死区时间范围来找到相应的公式,然后代入公式求解出相应的整数(有时候不一定是整数,那就选择最近的那个),拼接DTG[7:5]+DTG[4:0]即可。
例子:这样当我需要3us的死区持续时间时,则可这么计算:3us在第二个公式决定的死区范围之内。
所以选择第二个公式。
3000/(13.89*2)=108,所以DTG[5:0]=108-64=44,所以DTG=127+44=171=0XabTIM1->BDTR|=0xab;反过来验算//72Mhz,死区时间=13.89nsX108*2=3000us经示波器验证,完全正确。
By zxx2013.07.18。
STM32高级定时器TIM1输出六路带死区互补PWM波形
本文讲述如何配置单片机STM32F407VET6高级定时器TIM1输出六路带死区互补PWM波形。
一、高级定时器TIM1介绍
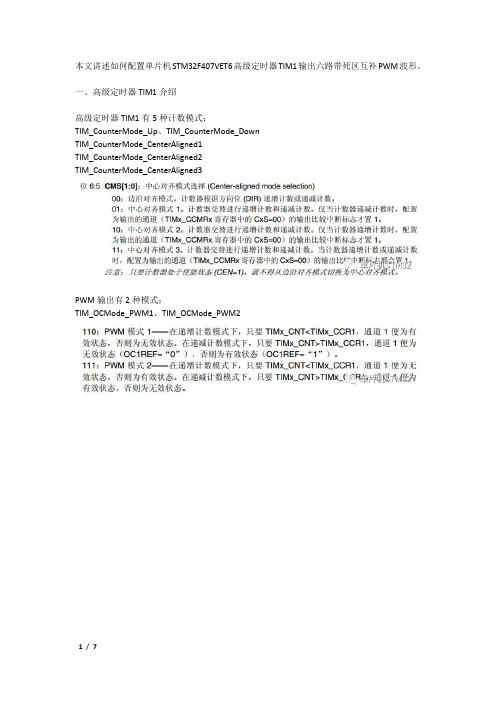
高级定时器TIM1有5种计数模式:
TIM_CounterMode_Up、TIM_CounterMode_Down
TIM_CounterMode_CenterAligned1
TIM_CounterMode_CenterAligned2
TIM_CounterMode_CenterAligned3
PWM输出有2种模式:
TIM_OCMode_PWM1、TIM_OCMode_PWM2
查看ST官方RM0090参考手册,高级定时器TIM1框图如下:
本文以高级定时器TIM1工作在TIM_CounterMode_Up模式,PWM工作在TIM_OCMode_PWM1为例,讲述如何配置输出六路带死区互补PWM波形。
二、配置代码示例
1.IO配置
硬件IO说明
TIM1_CH1---->PE9 TIM1_CH1N---->PE8
TIM1_CH2---->PE11 TIM1_CH2N---->PE10
TIM1_CH3---->PE13 TIM1_CH3N---->PE12
IO配置具体代码如下:
2. 定时器配置
三、实验测试
1. 测试硬件平台接线
2.测试结果
由测试结果可以看到高级定时器TIM1可以输出六路带死区互补PWM波形。
具体死区时间如何计算,下篇文章会讲解,敬请关注!。
stm32定时器

STM32定时器定时器功能简介区别于SysTick一般只用于系统时钟的计时,STM32的定时器外设功能非常强大。
STM32一共有8个都为16位的定时器。
其中TIM6、TIM7是基本定时器;TIM 2、TIM3、TIM4、TIM5是通用定时器;TIM1和TIM8是高级定时器。
这些定时器使STM32具有定时、信号的频率测量、信号的PWM测量、PWM输出、三相6步电机控制及编码器接口等功能,都是专门为工控领域量身定做的。
定时器工作分析基本定时器基本定时器TIM6和TIM7只具备最基本的定时功能,就是累加的时钟脉冲数超过预定值时,能触发中断或触发DMA请求。
这两个基本定时器使用的时钟源都是TIMxCLK,时钟源经过PSC预分频器输入至脉冲计数器TIMx_CNT,基本定时器只能工作在向上计数模式,在重载寄存器TIMx_ARR中保存的是定时器的溢出值。
工作时,脉冲计数器TIMx_CNT由时钟触发进行计数,当TIMx_CNT的计数值X等于重载寄存器TIMx_ARR中保存的数值N时,产生溢出事件,可触发中断或DMA请求。
然后TIMx_CNT的值重新被置为0,重新向上计数。
通用定时器相比之下,通用定时器TIM2~TIM5就比基本定时器复杂得多了。
除了基本的定时,它主要用在测量输入脉冲的频率、脉冲宽与输出PWM脉冲的场合,还具有编码器的接口。
通用定时器的基本计时功能与基本定时器的工作方式是一样的,同样把时钟源经过预分频器输出到脉冲计数器TIMx_CNT累加,溢出时就产生中断或DMA请求。
而通用定时器比基本定时器多出的强大功能,就是因为通用定时器多出了一种寄存器----捕获/比较寄存器TIMx_CRR(capture/compareregister)它在输入时被用于捕获(存储)输入脉冲在电平发生翻转时脉冲计数器TI Mx_CNT的当前计数值,从而实现脉冲的频率测量;在输出时被用来存储一个脉冲数值,把这个数值用于与脉冲计数器TIMx_CNT的当前计数值进行比较,根据比较结果进行不同的电平输出定时器的时钟源从时钟源方面来说,通用定时器比基本定时器多了一个选择,它可以使用外部脉冲作为定时器的时钟源。
stm32高级定时器 多通道控制步进电机 标准函数

标题:STM32高级定时器多通道控制步进电机标准函数一、STM32高级定时器简介1.1 STM32高级定时器的概念STM32系列微控制器中的高级定时器是一种功能强大的定时器,可以实现多通道控制、高精度定时等功能。
1.2 高级定时器的特点高级定时器具有多通道控制、PWM波形发生、编码器接口、定时周期计数等特点,非常适合用于控制步进电机。
二、多通道控制步进电机2.1 步进电机控制原理步进电机是一种将电能转化为机械能的设备,通过对电流的控制来驱动电机旋转。
多通道控制可以实现单步控制、微步控制等功能。
2.2 高级定时器在步进电机控制中的应用高级定时器的多通道控制功能可以实现对步进电机的精确控制,通过定时器的定时周期和占空比设置,可以实现步进电机的旋转角度控制。
三、标准函数的应用3.1 标准函数库的介绍STM32标准函数库是由ST公司提供的一套功能丰富的软件库,其中包含了丰富的功能函数和驱动程序,可以大大简化开发者的开发流程。
3.2 标准函数在高级定时器中的应用开发者可以通过调用标准函数库中提供的函数来实现对高级定时器的初始化、配置和控制,从而实现对步进电机的精确控制。
结语:通过本文对STM32高级定时器多通道控制步进电机标准函数的介绍,可以看出高级定时器在步进电机控制中具有重要的应用价值。
通过合理的设置定时器参数和调用标准函数库中的函数,开发者可以实现对步进电机的精确控制,为实际应用提供了便利。
希望本文能够帮助读者更深入地了解高级定时器多通道控制步进电机标准函数的应用,并且在实际开发中加以应用。
很抱歉,我似乎在给出的回复中存在了重复。
以下是补充的新内容:四、高级定时器的多通道控制方式4.1 多通道控制原理STM32的高级定时器可以实现多通道控制,将一个定时器的计时和控制功能分配给多个通道,实现多个功能的控制。
4.2 多通道控制的优势通过多通道控制,可以实现对多个外设设备的并行控制,减少了对多个定时器的占用,提高了系统资源的利用效率。
STM32系列高级控制定时器
Cortex-M3 的高级控制定时器目录摘要 (2)ABSTRACT (3)1绪论 (4)1.1Cortex-M3的背景及意义 (4)1.2高级控制定时器的意义 (4)2STM32 系列的体系结构 (6)2.1Cortex-M3 处理内核 (6)2.2嵌套向量中断控制器 (6)2.3两个可选组件 (6)2.4总线接口 (7)2.5调试接口 (7)3高级控制定时器 (8)3.1高级控制定时器的简介 (8)3.2高级控制定时器的功能描述 (8)3.3高级控制定时器的寄存器种类 (12)4STM32系列开发工具 (14)4.1Keil MDKE具................................................ .144.2Keil MDK 的安装 (14)5高级控制定时器实验设计 (19)5.1实验的目的 (19)5.2实验源代码的注解 (19)5.3实验运行及结果 (22)5.4 实验现象的分析 (24)结束语 (25)参考文献 (26)致谢 (27)STM32系列(Cortex-M3 )高级控制定时器摘要本文主要介绍STM3系列中Cortex-M3处理器,开发环境Keil MDK以及EduKit-M3实验平台。
Cortex-M3 处理器使用了 ARM v7-M 体系结构,是一个可综合的、高度可配置的处理器。
它也是一个低功耗的处理器,具有门数少 , 中断延迟小 , 调试容易等特点。
Cortex-M3 处理器的特性,使它适合很大范围的应用,主要包括:价格敏感的设备——通用MCU智能玩具、个人电子设备,低功耗设备一一 Zigbee、PAN(BlueTooth )、医疗电子设备,高性能设备——超低价格手机、汽车应用、大容量存储设备。
STM32微处理器基于ARM核,所以很多基于ARM嵌入式开发环境都可用于STM3开发平台。
开发工具都可用于STM32开发。
选择合适的开发环境可以加快开发进度,节省开发成本。
STM32高级定时器详解
STM32高级定时器详解高级定时器(TIM1和TIM8)由一个16位的自动装载计数器组成,它由一个可编程的预分频器驱。
它适合多种用途,包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较、PWM、嵌入死区时间的互补PWM 等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
高级控制定时器和通用定时器是完全独立的,它们不共享任何资源。
它们可以同步操作。
Table 457. TIM寄存器寄存器描述CR1 控制寄存器1CR2 控制寄存器2SMCR 从模式控制寄存器DIER DMA/中断使能寄存器SR 状态寄存器EGR 事件产生寄存器CCMR1 捕获/比较模式寄存器1CCMR2 捕获/比较模式寄存器2CCER 捕获/比较使能寄存器CNT 计数器寄存器PSC 预分频寄存器APR 自动重装载寄存器CCR1 捕获/比较寄存器1CCR2 捕获/比较寄存器2CCR3 捕获/比较寄存器3CCR4 捕获/比较寄存器4DCR DMA控制寄存器DMAR 连续模式的DMA地址寄存器Table 458. 例举了TIM的库函数Table 458. TIM库函数函数名描述TIM_DeInit 将外设TIMx寄存器重设为缺省值TIM_TimeBaseInit根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInit 根据TIM_OCInitStruct 中指定的参数初始化外设TIMxTIM_ICInit 根据TIM_ICInitStruct 中指定的参数初始化外设TIMx TIM_TimeBaseStructInit 把TIM_TimeBaseInitStruct 中的每一个参数按缺省值填入TIM_OCStructInit 把TIM_OCInitStruct 中的每一个参数按缺省值填入TIM_ICStructInit 把TIM_ICInitStruct 中的每一个参数按缺省值填入TIM_Cmd 使能或者失能TIMx 外设TIM _ITConfig 使能或者失能指定的TIM 中断TIM_DMAConfig 设置TIMx的DMA接口TIM_DMACmd 使能或者失能指定的TIMx 的DMA请求TIM_InternalClockConfig 设置TIMx 内部时钟TIM_ITRxExternalClockConfig 设置TIMx 内部触发为外部时钟模式TIM_TIxExternalClockConfig 设置TIMx 触发为外部时钟TIM_ETRClockMode1Config 配置TIMx 外部时钟模式1TIM_ETRClockMode2Config 配置TIMx 外部时钟模式2TIM_ETRConfig 配置TIMx 外部触发TIM_SelectInputTrigger 选择TIMx 输入触发源TIM_PrescalerConfig 设置TIMx 预分频TIM_CounterModeConfig 设置TIMx 计数器模式TIM_ForcedOC1Config 置TIMx 输出1 为活动或者非活动电平TIM_ForcedOC2Config 置TIMx 输出2 为活动或者非活动电平TIM_ForcedOC3Config 置TIMx 输出3 为活动或者非活动电平TIM_ForcedOC4Config 置TIMx 输出4 为活动或者非活动电平TIM_ARRPreloadConfig 使能或者失能TIMx在ARR 上的预装载寄存器TIM_SelectCCDMA 选择TIMx 外设的捕获比较DMA源TIM_OC1PreloadConfig 使能或者失能TIMx在CCR1 上的预装载寄存器TIM_OC2PreloadConfig 使能或者失能TIMx在CCR2 上的预装载寄存器TIM_OC3PreloadConfig 使能或者失能TIMx在CCR3 上的预装载寄存器TIM_OC4PreloadConfig 使能或者失能TIMx在CCR4 上的预装载寄存器TIM_OC1FastConfig 设置TIMx 捕获比较1 快速特征。
STM32定时器定时时间配置总结
STM32定时器定时时间配置总结STM32系列微控制器内置了多个定时器模块,它们可以用于各种定时功能,如延时、周期性触发、脉冲计数等。
在使用STM32定时器之前,我们需要进行定时时间配置,本文将总结一下STM32定时器定时时间配置的相关知识,包括定时器工作模式、定时器时钟源选择、定时器时钟分频、定时器计数器重载值以及定时器中断配置等内容。
首先,我们需要选择定时器的工作模式。
STM32定时器支持多种工作模式,包括基本定时器模式、高级定时器模式、输入捕获模式和输出比较模式等。
基本定时器模式适用于简单的定时和延时操作,输入捕获模式适用于捕获外部事件的时间参数,输出比较模式适用于产生精确的PWM波形。
根据具体的应用需求,选择合适的工作模式。
其次,我们需要选择定时器的时钟源。
STM32定时器的时钟源可以选择内部时钟源(如系统时钟、HCLK等)或外部时钟源(如外部晶体)。
内部时钟源的稳定性较差,适用于简单的定时操作,而外部时钟源的稳定性较好,适用于要求较高的定时操作。
然后,我们需要选择定时器的时钟分频系数。
定时器的时钟分频系数决定了定时器的时钟频率,从而影响了定时器的计数速度。
我们可以通过改变时钟分频系数来调整定时器的计数速度,从而实现不同的定时时间。
时钟分频系数的选择需要考虑定时器的最大计数周期和所需的定时精度。
接着,我们需要配置定时器的计数器重载值。
定时器的计数器从0开始计数,当计数器达到重载值时,定时器将重新开始计数。
通过改变计数器重载值,可以实现不同的定时时间。
计数器重载值的选择需要考虑定时器的时钟频率和所需的定时时间。
最后,我们需要配置定时器的中断。
定时器中断可以在定时器计数达到重载值时触发,用于通知CPU定时器已经计数完成。
在定时器中断中,我们可以执行相应的中断服务程序,比如改变一些IO口的状态,实现定时操作。
通过配置定时器的中断使能和中断优先级,可以实现不同的中断操作。
需要注意的是,不同型号的STM32微控制器的定时器模块可能略有不同,具体的配置方法和寄存器设置也可能不同,请参考相应的数据手册和参考手册进行具体操作。
STM32高级定时器使用方法及注意事项(word文档良心出品)
STM32高级定时器使用方法及注意事项(word文档良心出品)By 深圳市威睿晶科Felix主要特性:高级定时器与通用定时器的主要差别如下红色区域●16位向上、向下、向上/下自动装载计数器●16位可编程(可以实时修改)预分频器,计数器时钟频率的分频系数为1~65535之间的任意数值●多达4个独立通道:─ 输入捕获─ 输出比较─ PWM生成(边缘或中间对齐模式)─ 单脉冲模式输出●死区时间可编程的互补输出●使用外部信号控制定时器和定时器互联的同步电路●允许在指定数目的计数器周期之后更新定时器寄存器的重复计数器●刹车输入信号可以将定时器输出信号置于复位状态或者一个已知状态●如下事件发生时产生中断/DMA:─ 更新:计数器向上溢出/向下溢出,计数器初始化(通过软件或者内部/外部触发) ─ 触发事件(计数器启动、停止、初始化或者由内部/外部触发计数) ─ 输入捕获─ 输出比较─ 刹车信号输入●支持针对定位的增量(正交)编码器和霍尔传感器电路●触发输入作为外部时钟或者按周期的电流管理如上所示,对于一般地应用是体现不出来它高端的地方了。
使用心得:由于V3.5库函数将定时器资源全部融合在一块了,所以显得stm32f10x_tim.c库特别庞大,找功能函数很是麻烦,还容易搞混乱。
面对这种情况寄存器操作就显得很方便了,所以以下程序我是直接参考寄存器说明来逐步配置的,阅读起来不太方便,但写起来方便,而且不会重复混乱,更容易理解到定时器的工作过程。
1 首先是作为定时器的通用功能:定时定时功能的实现,是通过设置定时时钟为内部时钟源来实现,如手册上介绍:“如果禁止了从模式控制器(SMS=000),则CEN、DIR(TIMx_CR1寄存器)和UG 位(TIMx_EGR寄存器)是事实上的控制位,并且只能被软件修改(UG位仍被自动清除)。
只要CEN位被写成’1’,预分频器的时钟就由内部时钟CK_INT提供。
”配置步骤如下:void TIM1Timing(void){RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1|RCC_APB 2Periph_GPIOA,ENABLE); //打开TIM1时钟TIM1->CR1 =0x380 ;//456bit=0,向上计数TIM1->SMCR&=0xfff8;//sms=000,禁止从模式控制器TIM1->PSC=7199;//设置预分频,公式fCK_PSC/( PSC[15:0]+1)= 0.1Mhz,100us/+1TIM1->ARR=10000;//设置自动重装载值为10000,即溢出一次时间为1STIM1->RCR=0;//重复计数寄存器为0,这个是设置事件(中断)频率的,为0即溢出1次中断标志置位TIM1->EGR|=1;重新初始化计数器,即清空计数器(要是向上计数则清0,要是向下计数则填装自动装载值)TIM1->SR&=0x0000;//清中断标志TIM1->DIER|=1;//开启更新中断,即出现一次溢出事件中断一次TIM1->CR1|=0X001;//打开定时器1}这样就实现了最基本的定时功能,可以在中断函数里实现1S的定时处理2,输入捕获功能:InputCapture这个功能可以很方便的计算出输入信号的频率,兼具外部计数以及内部定时的功能手册上的实现步骤:是以配置TIM1的通道1-TI1为例的●选择有效输入端:TIMx_CCR1必须连接到TI1输入,所以写入TIMx_CCR1寄存器中的CC1S=01,只要CC1S不为’00’,通道被配置为输入,并且TIMx_CCR1寄存器变为只读。
stm32通用定时器详解
stm32通用定时器STM32的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做PWM输出或者输入捕获功能。
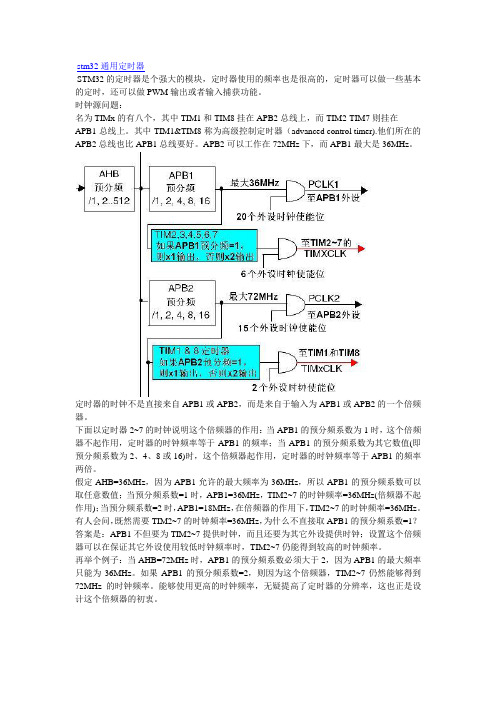
时钟源问题:名为TIMx的有八个,其中TIM1和TIM8挂在APB2总线上,而TIM2-TIM7则挂在APB1总线上。
其中TIM1&TIM8称为高级控制定时器(advanced control timer).他们所在的APB2总线也比APB1总线要好。
APB2可以工作在72MHz下,而APB1最大是36MHz。
定时器的时钟不是直接来自APB1或APB2,而是来自于输入为APB1或APB2的一个倍频器。
下面以定时器2~7的时钟说明这个倍频器的作用:当APB1的预分频系数为1时,这个倍频器不起作用,定时器的时钟频率等于APB1的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8或16)时,这个倍频器起作用,定时器的时钟频率等于APB1的频率两倍。
假定AHB=36MHz,因为APB1允许的最大频率为36MHz,所以APB1的预分频系数可以取任意数值;当预分频系数=1时,APB1=36MHz,TIM2~7的时钟频率=36MHz(倍频器不起作用);当预分频系数=2时,APB1=18MHz,在倍频器的作用下,TIM2~7的时钟频率=36MHz。
有人会问,既然需要TIM2~7的时钟频率=36MHz,为什么不直接取APB1的预分频系数=1?答案是:APB1不但要为TIM2~7提供时钟,而且还要为其它外设提供时钟;设置这个倍频器可以在保证其它外设使用较低时钟频率时,TIM2~7仍能得到较高的时钟频率。
再举个例子:当AHB=72MHz时,APB1的预分频系数必须大于2,因为APB1的最大频率只能为36MHz。
如果APB1的预分频系数=2,则因为这个倍频器,TIM2~7仍然能够得到72MHz的时钟频率。
能够使用更高的时钟频率,无疑提高了定时器的分辨率,这也正是设计这个倍频器的初衷。
第六章STM32 定时器的使用

}
}
步骤五:配置main函数,实现定时器控制跑马灯。
volatile u32 time;
int i=0;
int main(void) { SystemInit(); //配置系统时钟为72控制跑马灯(P190)
1.理解STM32通用定时器的结构和基本工作原理; 2.掌握STM32通用定时器初始化和操作方法; 3.理解中断概念; 4.掌握STM3中断服务程序的写法。
硬件设计 硬件连接图如下,实验板上stm32f103x处理器
通过配置GPIO实现如下功能:D3~D6轮流点亮,点亮时 间持续1秒。
软件设计 步骤一:添加库函数,以及操作函数。 添加相应库函数:
操作函数有:USER/main.c ;stm32f10x_it.c ;led.h; led.c ;timer.h;timer.c;TIM2_IRQHandler()。 步骤二:在timer.h函数中设置宏定义和函数声明:
void TIM2_NVIC_Config(void); void TIM2_Config(void);
TIN_TimBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = (10000 - 1); //自动重装的计数值
TIM_TimeBaseStructure.TIM_Prescaler =7200-1 ; // 预分频系数
立即加载计数器(ARPE=0)
更新事件时加载计数器(ARPE=0)
6.2.2 计数器模式 1. 向上计数模式:计数器从0计数到设定的数值,然 后重新从0开始计数并且产生一个计数器溢出事件。
计数器时序图(内部时钟分频因子为1)
stm32中死区函数

stm32中死区函数STM32中,死区函数被广泛应用于电机控制和电源电路等领域。
本文将对STM32中的死区函数进行详细的讲述,包括其概念、原理及应用等内容。
一、概念死区是电机驱动器设计时的一种特殊区域,它防止了两个独立的半桥开关同时通断,从而避免了瞬间短路。
因此,死区函数也称为“电机驱动器的瞬态保护功能”。
STM32中的死区函数(DeadTime)可以通过芯片内部的定时器控制,它能够延时开关开启和关闭,以确保电源电路中的电子元件在运行时保持安全和稳定。
二、原理死区函数通过控制某种波形(如正弦波或方波)的占空比来实现电机控制或电源电路的设计。
在控制器的输出信号中插入一个死区延迟,防止了两个半桥开关同时通断,避免了瞬间短路现象的发生,这就是死区函数的原理。
以STM32F407VG芯片为例,它具有四个通道,每个通道有两个半桥管。
STM32中死区函数的具体实现方法是通过使用定时器的死区控制寄存器来设置死区的时长。
三、应用死区函数广泛应用于电机控制和电源电路中。
在BLDC(无刷直流电机)驱动控制电路中,死区函数可以改善驱动器和电机之间的通信,从而有效减少了电机产生的噪声和振动。
在PWM(脉冲宽度调制)电源电路中,死区函数可以提高工作效率,减少损耗和热量,延长电源电路的使用寿命。
在STM32中的具体应用中,一般需要按照以下步骤进行:1、根据电机或电源电路的设计要求确定死区的时长。
2、使用STM32的定时器模块,配置死区控制寄存器。
3、将该代码嵌入到电机控制或电源电路的程序之中,即可实现死区的控制。
总之,STM32中的死区函数是一种非常重要的功能,它可以在电机控制和电源电路的设计中发挥重要作用,通过降低噪声和振动,延长电源电路使用寿命。
既能满足不同领域的设计要求,又能保证电路的安全和稳定性,是系统中不可或缺的一部分。
STM32的PWM精讲

第 2 章 STM32 处理器概述 STM32F103xx 增强型系列产品中内置了多达 3 个同步的标准定时器。每个定 时
器都有一个 16 位的自动加载递加/递减计数器、一个 16 位的预分频器和 4 个 独立的 通道,每个通道都可用于输入捕获、输出比较、PWM 和单脉冲模式输出, 在最大的 封装配置中可提供最多 12 个输入捕获、输出比较或 PWM 通道。它们还 能通过定时器 链接功能与高级控制定时器共同工作,提供同步或事件链接功能。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术其控制简单灵活和动态响应好等优点而成为电力电子技术最广泛应用的控制方式其应用领域包括测量通信功率控制与变换电动机控制伺服控制调光开关电源甚至某些音频放大器因此研究基于pwm技术的正负脉宽数控调制信号发生器具有十分重要的现实意义
STM32 的 PWM 精讲
器中的计数器使能位(CEN)时,CK_CNT 才有效。(有关更多的计数器使能的 细节,请参见控制器的从模式描述)。
注:真正的计数器使能信号 CNT_EN 是在 CEN 后的一个时钟周期后被设置。 预分 频器描述 。
预分频器可以将计数器的时钟频率按 1 到 65536 之间的任意值分频。它是
如何采用STM32中的控制定时器Tim1实现计数器功能

如何采用STM32中的控制定时器Tim1实现计数器功能STM32中的高级控制定时器(Tim1)是由一个16位的自动装载计数器组成,它由一个可编程预分频器驱动。
用途在于:测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较,PWM,嵌入死区时间的互补PWM等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
具体如下:16位上下,自动装载计数器。
16位可编程预分频器,计数器时钟频率的分频率的分频系数为1-65535之间任意数值,4个独立通道:输入捕获输出比较PWM生成单脉冲模式输出死区时间可编程的互补输出使用外部信号控制定时器和定时器互连的同步电路在指定数目的计数器周期之后更新定时器寄存器刹车输入信号可以将定时器输出信号置于复位状态或者一个已知状态如下事件发生时产生中断:更新:计数器向上溢出或者向下溢出,计数器初始化。
触发事件(计数器启动,停止,初始化)输入捕获输出比较刹车信号输入下面介绍一下采用TIm1实现计数器的功能:步骤一:进行定时器时钟启动:void TIm1_on(){钟设置:启动TIM1RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);}步骤二:实现对定时器的配置(对其内部寄存器进行配置初始化)断NVIC设置:允许中断,设置优先级= TIM1_UP_IRQChannel; //更新事件= 0; //抢占优先级0= 1; //响应优先级1= ENABLE; //允许中断NVIC_Init(//写入设置}将这里基本设施都能好了。
我们可以进行中断函数的设置,就是进入中断要干什么。
tim1中断有:TIM1_BRK_IRQHandler(void)//tim1的暂停中断TIM1_CC_IRQHandler(void)//tim1的捕获比较中断TIM1_TRG_COM_IRQHandler(void)//tim1的触发TIM1_UP_IRQHandler(void)//tim1的刷新中断和通讯中断。
STM32库开发实战指南-M4:32- TIM—高级定时器
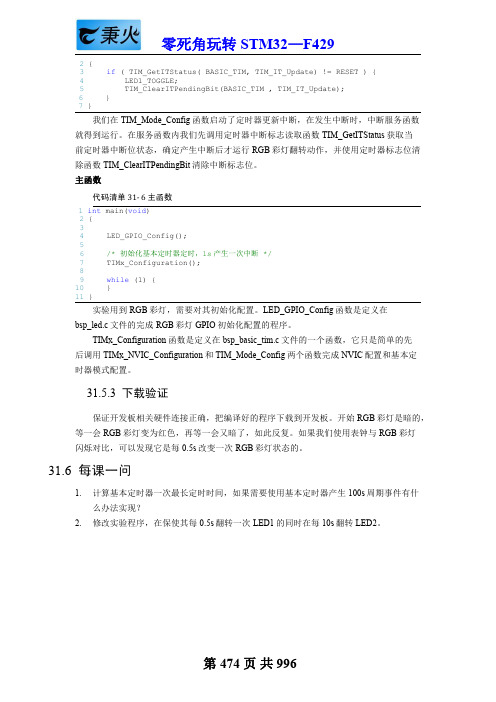
2{3if(TIM_GetITStatus(BASIC_TIM,TIM_IT_Update)!=RESET){4LED1_TOGGLE;5TIM_ClearITPendingBit(BASIC_TIM,TIM_IT_Update);6}7}我们在TIM_Mode_Config函数启动了定时器更新中断,在发生中断时,中断服务函数就得到运行。
在服务函数内我们先调用定时器中断标志读取函数TIM_GetITStatus获取当前定时器中断位状态,确定产生中断后才运行RGB彩灯翻转动作,并使用定时器标志位清除函数TIM_ClearITPendingBit清除中断标志位。
主函数代码清单31-6主函数1int main(void)2{34LED_GPIO_Config();56/*初始化基本定时器定时,1s产生一次中断*/7TIMx_Configuration();89while(1){10}11}实验用到RGB彩灯,需要对其初始化配置。
LED_GPIO_Config函数是定义在bsp_led.c文件的完成RGB彩灯GPIO初始化配置的程序。
TIMx_Configuration函数是定义在bsp_basic_tim.c文件的一个函数,它只是简单的先后调用TIMx_NVIC_Configuration和TIM_Mode_Config两个函数完成NVIC配置和基本定时器模式配置。
31.5.3下载验证保证开发板相关硬件连接正确,把编译好的程序下载到开发板。
开始RGB彩灯是暗的,等一会RGB彩灯变为红色,再等一会又暗了,如此反复。
如果我们使用表钟与RGB彩灯闪烁对比,可以发现它是每0.5s改变一次RGB彩灯状态的。
31.6每课一问1.计算基本定时器一次最长定时时间,如果需要使用基本定时器产生100s周期事件有什么办法实现?2.修改实验程序,在保使其每0.5s翻转一次LED1的同时在每10s翻转LED2。
第32章TIM—高级定时器本章参考资料:《STM32F4xx参考手册》、《STM32F4xx规格书》、库帮助文档《stm32f4xx_dsp_stdperiph_lib_um.chm》。
STM32教程_高级定时器
你也只需一块这样板子再来一点时间与干劲这个历程一样跑的起来。
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
STM32 高级定时器-PWM 简单使用 2011-03-27 21:43 转载自 百合师 最终编辑 百合师
如果输出与互补输出极性相同的话 就刚好输出高 互补低 至于 PWM 模式1 与模式2的 区别 在下图:
这个是模式1的 了绿为输出 黄为互补 **************************************************************************** *********************
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
}
/*************************************************************************** ************/ 再来两张 最小系统板子 /*************************************************************************** ************/
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
上图是模式2的情况 正好和模式1的反过来了 144中有40 为高 互补的有40为低。 **************************************************************************** *********************/ //在 MAIN 中加点键盘扫描啥的 用来改变占空比 /************************************************************ **实验名称:PWM **功能:是 PA8产生 PWM 输出,PA8为驱动 LED1和马达的 IO, 通过 UP DOWN 键,可以改变占空比,从而让 ED1和小马达的产生变化 **注意事项:LED 是低有效,马达则是高有效,所以 LED 全灭的时候马达转速达到最高. **作者:电子白菜 *************************************************************/ #include "STM32Lib\\stm32f10x.h" #include "hal.h" extern void SetT1Pwm1(u16 pulse); int main(void) { u16 pulse=40; ChipHalInit(); //片内硬件初始化 ChipOutHalInit(); //片外硬件初始化 for(;;) { if(GET_UP()) { while(GET_UP()); if(pulse<=144) { pulse+=5; SetT1Pwm1(pulse); } } if(GET_DOWN()) { while(GET_DOWN()); if(pulse>30) { pulse-=5; SetT1Pwm1(pulse); } } }
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32高级定时器都带有死区控制功能,一般来说死区控制主要用于马达、变频器等控制。
一、死区时间概念
BLDC控制换相电路如下
死区时间是两路互补PWM输出时,为了使桥式换相电路上管T1和下管T2、上管T3和下管T4、上管T5和下管T6不会因为开关速度问题发生同时导通(同时导通电源会短路)而设置的一个保护时段。
假设STM32高级定时器OCX和OCXN输出互补通道PWM,极性都是高电平有效,则下图中标注“延迟”那段时间就是死区时间,此时间段上管和下管都没有导通。
二、STM32高级定时器死区时间计算
1. 配置寄存器
2. 死区时间计算示例
假设STM32F407的高级定时器TIM1的时钟为168MHz,设置tDTS=1/168us。
死区时间设置2us,经过估算该死区时间落在DTG[7:5]=110段。
(32+DTG[4:0]) /21 us= 2us,计算出DTG[4:0]=10=01010B,
再与DTG[7:5]拼接,最后算得DTG[7:0]=10=11001010B=0xCA。
死区时间设置4us,经过估算该死区时间落在DTG[7:5]=111段。
2*(32+DTG[4:0]) /21 us= 4us,计算出DTG[4:0]=10=01010B,
再与DTG[7:5]拼接,最后算得DTG[7:0]=10=11101010B=0xEA。
需注意死区时间计算是分段计算,每段公式不一样。
三、配置死区时间过程可能出现的问题
问题:发现插入死区时间后,没有互补脉冲输出了。
一般是死区参数设置不合适导致出现了以下两种情况。
如果延迟时间大于有效输出(OCx 或OCxN)的宽度,则不会产生相应的脉冲。
注意:插入死区是为了保证桥式驱动电路中上下桥臂的开关管不会同时导通,提高控制安全性,但不是死区时间越长越好,死区是以牺牲开关管有效驱动脉冲时间为代价的,死区时间长短是由开关管硬件开关的速度决定。