鼠笼式感应电机的分析
三相鼠笼异步电机的空载堵转实验吴丹
课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉三相鼠笼异步电机的空载堵转实验一、实验目的1、掌握三相异步电机的空载、堵转实验的方法2、用实验的方法测定三相鼠笼异步电动机的相关参数3、掌握三相异步电动机的空载特性和短路特性二、实验设备序号型号名称数量备注1 DD03 导轨、测速发电机及转速表1件2 DJ16 三相鼠笼异步电动机1件HznA IVUWPN NNN50f14205.0 ,220,100==== =,3 D33 交流电压表1件量程为300V4 D32 交流电流表1件量程为1A5 D34-3 单三相智能功率、功率因数表1件6 万用表1件7 堵转螺杆1件三、实验实际线路图DD01三相调压交流电源UVWV1V2V3W2W1****A1A2A3M3~三相鼠笼式异步电机实验接线图课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉三相鼠笼式异步电机转子结构三相鼠笼式异步电机定子结构异步电动机的铭牌万用表实验实际线路图三相鼠笼式异步电机的空载试验课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉实验实际线路图三相鼠笼式异步电机的堵转试验此时,转子堵转课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉测量定子绕组实际线路图Z=45.3ΩAXZ=47.5ΩBYZ=45.0ΩCZ课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉四、实现数据空载试验 三相鼠笼式异步电动机空载试验数据记录表序号1到19 异步机转速1492r/min 序号20 异步机转速207r/min 序号OL U (V)OL I (A)O P (W)cos φAB UBC UCA U OL UA IB IC IOL I1P2PO P1 264 264 265 264.3 0.31 0.31 0.29 0.303 50.1 -28.1 21.6 0.6 0.352 248 246 249 247.7 0.286 0.2850.270.280 43.9 -24.1 200.61 0.353 235 232 235 2340.266 0.2680.252 0.262 39.3 -20.7 18.6 0.62 0.34 4 228 226 228 227.3 0.256 0.258 0.249 0.254 37.1 -19.1 17.8 0.62 0.33 5 220 218 220 219.3 0.246 0.248 0.235 0.243 34.5 -17.3 17.2 0.63 0.33 6 214 212 214 213.3 0.238 0.240 0.225 0.234 32.5 -15.9 16.6 0.63 0.32 7 203 201 204 202.7 0.226 0.228 0.215 0.223 29.9 -14.1 15.8 0.64 0.32 8 191 190 192 1910.212 0.2100.200 0.207 26.9 -11.9 15.0 0.65 0.31 9 180.5 180 181 180.5 0.200 0.200 0.190 0.200 24.5 -10.3 14.2 0.66 0.30 10 170.7 170 172 170.9 0.189 0.188 0.180 0.186 22.3 -8.7 13.6 0.67 0.28 11 159 159 161 159.7 0.176 0.174 0.170 0.172 19.9 -6.9 13.0 0.69 0.25 12 149 148 151 149.3 0.166 0.164 0.160 0.163 18.1 -5.7 12.2 0.71 0.23 13 137.4 136 139 137.5 0.156 0.151 0.150 0.152 16.1 -4.3 11.8 0.74 0.21 14 127.5 126 130 127.8 0.149 0.140 0.140 0.143 14.7 -3.5 11.40.76 0.1815 113.8 114 116 114.6 0.139 0.135 0.130 0.135 12.7 -1.9 10.8 0.78 0.14 16 102.5 102 105 103.2 0.129 0.128 0.125 0.127 11.3 -0.9 10.2 0.82 0.07 17 90.1 91 92 91.03 0.124 0.120 0.120 0.121 9.9 0 9.9 0.87 0 18 80.2 80 76 78.7 0.121 0.120 0.120 0.1128.90.9 9.6 0.89 0.07 19 64.3 65 67 65.4 0.131 0.128 0.128 0.129 8.11.39.4 0.92 0.15 20 49.4495049.50.303 0.300.299 0.301 12.1 -1.111.20.81 0.07课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉堵转实验 三相鼠笼式异步电动机堵转试验数据记录表 序号KL U (V) KL I (A)K P (W)cos φAB U BC U CA U KL U A I B IC IKL I1P2PK P1 77.4 76.1 78.0 77.2 0.607 0.598 0.599 0.601 38.9 -2.9 36.2 0.82 0.06 2 72.0 71.5 73.0 72.2 0.549 0.540 0.545 0.545 32.7 -2.9 29.8 0.81 0.073 67.9 67.1 68.1 67.7 0.504 0.500 0.500 0.501 27.9 -2.7 25.4 0.80 0.08 4 62.8 62.0 63.0 62.6 0.450 0.450 0.448 0.449 23.1 -2.7 20.2 0.80 0.095 48.1 48.0 48.7 48.3 0.305 0.305 0.301 0.303 11.5 -2.1 9.4 0.77 0.14 631.431.232.031.50.1500.1500.1510.1513.5-1.12.40.710.23AX Z =45.3Ω BY Z =47.5Ω CZ Z =45.0Ω五、数据处理1作空载特性曲线课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉课程电机学(2) 实验项目三相鼠笼异步电机的空载堵转实验班级 2010029班姓名吴丹 20101320 同组人姓名郭醒金陶哲王辛吉2、短路特性曲线课程 电机学(2) 实验项目 三相鼠笼异步电机的空载堵转实验 班级 2010029班 姓名 吴丹 20101320 同组人姓名 郭醒 金陶哲 王辛吉由短路试验数据求短路参数短路阻抗:KLKL K K K I U I U Z 3==ϕϕ=501.07.673Ω=234.05157619Ω 短路电阻:22r KLKK K K I P I P ==ϕϕ=2501.04.25Ω=101.19481596Ω 短路阻抗:22r KK K Z X -==211.04442552Ω 式中 KL K U U =ϕ 3KL K I I =ϕ 3K K P P =ϕ电动机堵转时的相电压,相电流,每相短路功率(三角形接法)转子电阻的折合值:C K r r 1'2r -≈式中C 1r 是没有折算到C 075时实际值。
双鼠笼电机笼条断裂分析及处理
双鼠笼电机笼条断裂的原因分析及解决方案×××(××××××发电有限责任公司×××× 044602)摘要:笼条断裂是双鼠笼式电机转子的常见故障,本文通过对××××发电厂#6炉高压电机转子检修时发现的问题及处理方法进行分析和总结。
Abstract: The Cage fracture is a two-squirrel-cage rotor common faults, this paper Douhe by Datang International Power Plant # 6 furnace repair high-pressure rotor and found the problems and treatment methods for analysis and summary。
关键词:双鼠笼,笼条断裂,分析和总结Key words: double-cage, cage of fracture, analysis and summary引言双鼠笼式电机对比单鼠笼电机改善了启动性能,近年来得到广泛应用,但是双鼠笼和单鼠笼电机的共性问题——笼条易断裂至今未得到彻底解决,作者根据××电厂的实践提出新的解决方案。
情况介绍××电厂#6炉配备4台排粉机电机,型号为JS1510_4,电压6000V,电流90.8,功率850KW,功率因数0.89,是兰州或沈阳电机厂1983年左右生产的双鼠笼异步电动机,至今已有27年左右。
在本次#6机组炉侧高压电机检修中发现,排粉机电机转子存在不同程度的鼠笼条断裂现象,最严重的断条达20根,并且断条位置都在外笼。
笼条断裂原因分析一)频繁启动。
启动时电流是平时的5~~7倍,此时,笼条因受到较大的感应电流而迅速升温,材质强度下降,热应力增加,再加上电磁扭矩的作用,使笼条产生较大的剪切力和离心力,频繁启动使笼条频繁受到上述力的作用,很容易达到疲劳极限,导致笼条断裂。
鼠笼型电动机的起动分析

对 于象 刮板运输机 、 皮带运输 机 , 一些机械惯量 较大 的生产机
鼠笼电动机一般采用直接起 动( 全压起动 ) , 起动电流约为额定 械要 。 如采用 鼠笼电动机拖动 , 必须很好地考虑起动问题 。 目前生产 电流 的 5 — 8 倍 。任 何供电网都是有 内阻的( 变压器阻抗 、 线路 阻抗 的重型刮板运输机和皮带运输机都配备有 多台 电机 ,即运输距 离 等) , 电网容量越小 , 电源 的阻抗越大。 在大电流 的冲击下 , 电网电压 长 、 负载 大时多安 装几 台电动机 , 距离 短 , 负载小 时可 以少安装 几 将有较大 幅度 的降落 , 这不仅影 响起 动电动机的起动 , 而且会 影响 台 : 这样 既增加 了设备使 用的灵活性 , 同时 , 由于几台小电动机转子 接在同一电网上 的其他用户的正常工作 。 所 以在考虑鼠笼 电动机起 的转动惯量要 比一台容量相 同的大 电动机的转动惯量小很多 , 从而 动问题时必须从保 证电网电压水平 的角度 出发 。一般在煤矿 中规 也减小 了拖动系统的转动惯量。 为了减少 鼠笼转子在起动过程的能 定: 当动力线与照 明线 分开供电时 , 允许在起 动时母线 电压 降至电 量 损失 , 在这些 动输机上常装备有液力联轴器 , 其作 用不仅是解 决 网额定电压 U 。 的7 0—8 0 %; 当动力 、 照明混合供 电时 , 如起 动频繁 , 起 动时转子损失 , 也可在一定程度上对多台并联 运行 的电动机的负 母线 电压不得 降低 到 U e 9 0 % 以下 ,起动次数少而且起 动时间很短 载起平衡作用。
时, 可允许降至 U e 8 5 %。
当起动时的电网电压降落超过上述限额时 , 就要采取措施 。一 般是采用 降压 起动的办法 , 用电阻 、 电抗器 , 或 自耦变 压器( 俗称起 动补偿器 ) 降压 , 以减小起动 电流 , 但 同时起动力矩也降低 了。只要 起动力矩 Mq 大于 M x 就可 以, 如果小于 M x , 需改用绕线式 电动机 。 3起动过程的能量损耗 起动过程中转子 回路 的能量损耗包括铜损和铁损两部分 。 在起 动过程 中电机的磁场 中 和正常工作 时的 差不多 , 只是转子频率 较高 , 故转子铁损会 有所增大 ; 但 即使在 5 0 H z 下, 铁损也只 占很小 比重 。起动时的转子 电流 比正常时高好多倍。铜损是与电流平方成 正比例 的, 因此起动过程中转子的发热主要是 由铜损 引起 的。所 以 讨论 时铁损可忽略不计 , 只考虑铜损 的影响。 由定子穿过气隙传递到转子 回路的电磁 功率 P o =M t o c , 其 中一
三相鼠笼异步电动机实验

三相鼠笼异步电动机实验————————————————————————————————作者:————————————————————————————————日期:实验六三相鼠笼异步电动机的工作特性一.实验目的1.掌握三相异步电机的空载、堵转和负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相笼型异步电动机的参数。
二.预习要点1.异步电动机的工作特性指哪些特性?2.异步电动机的等效电路有哪些参数?它们的特理意义是什么?3.工作特性和参数的测定方法。
三.实验项目1.测量定子绕组的冷态电阻。
2.判定定子绕组的首未端。
3.空载试验。
4.短路试验。
5.负载试验。
三.实验设备及仪器1.MEL系列电机教学实验台主控制屏。
2.电机导轨及测功机、矩矩转速测量(MEL-13、MEL-14)。
3.交流功率、功率因数表(MEL-20或MEL-24或含在实验台主控制屏上)。
4.直流电压、毫安、安培表(MEL-06或含在实验台主控制屏上)。
5.三相可调电阻器900Ω(MEL-03)。
6.波形测试及开关板(MEL-05)。
7.三相鼠笼式异步电动机M04。
五.实验方法及步骤1.测量定子绕组的冷态直流电阻。
准备:将电机在室内放置一段时间,用温度计测量电机绕组端部或铁芯的温度。
当所测温度与冷动介质温度之差不超过2K 时,即为实际冷态。
记录此时的温度和测量定子绕组的直流电阻,此阻值即为冷态直流电阻。
(1)伏安法测量线路如图3-1。
S1,S2:双刀双掷和单刀双掷开关,位于MEL-05。
R:四只900Ω和900Ω电阻相串联(MEL-03)。
A、V:直流毫安表和直流电压表,或采用MEL-06,或在主控制屏上。
量程的选择:测量时,通过的测量电流约为电机额定电流的10%,即为50mA,因而直流毫安表的量程用200mA档。
三相笼型异步电动机定子一相绕组的电阻约为50欧姆,因而当流过的电流为50mA时三端电压约为2.5伏,所以直流电压表量程用20V档,实验开始前,合上开关S1,断开开关S2,调节电阻R至最大(3600Ω)。
(感应)鼠笼式电机设计
电气2014级“卓班”企业课程(电机学)实习与实训报告专业:电气工程及其自动化班级:电气1401姓名:学号:指导教师:自动化与电气工程学院2016 年7月15日1 实习报告1.1 实习项目时间:2016-7-12,14.00—15.30地点:指导教师:实习内容:了解变压器生产与制造的工艺流程及测试方法变压器就是一种利用电磁互感应,变换电压,电流和阻抗的器件。
变压器由铁心(或磁芯)和线圈组成。
铁心是变压器中主要的此路部分。
通常由含硅量较高,表面涂有绝缘漆的热轧或冷轧硅钢片叠装而成。
变压器的铁心是闭合结构。
其中套线圈的部分称为心柱,不套线圈只起闭合磁路作用的部分称为铁轭。
按冷却方式分类:干式(自冷)变压器、油浸(自冷)变压器、氟化物(蒸发冷却)变压器。
干式和油浸式变压器有很大区别。
油浸变压器的应用范围很广。
可以在户内,也可以载户外。
油浸变压器特别适合户外,干式变压器适用于室内。
油变接纳在独立的变电场合。
地区天气比较湿润闷热地区,易利用油变。
要是利用在干变得环境下,必须配合有逼迫风冷却设置装备的部署。
我国正在设置装备部署的特高压1000kV试验线路,接纳的肯定是油浸式变压器。
变压器油的主要作用是绝缘作用,变压器油具有比空气高得多的绝缘强度。
绝缘材料浸在油中,不仅可提高绝缘强度,而且还可以免受潮气的侵蚀。
散热作用,变压器油的比热容打,常用作冷却剂。
消狐作用,在变压器的有载调压开关上,触头切换时会发生电弧。
由于变压器油导热性能好,且在电弧的高温作用下能分触大量空气,产生较大压力,从而提高了介质的灭弧性能,使电弧很快熄灭。
图1变压器铁心图2 变压器绕组1.2 体会这是我们即将结束大二、步入大三生活学习的最后一个实习。
是我们对电机学这门专业基础课程进行更为深入了解、学习的难得可贵的机会。
宏宇变压器公司这个专业性极强的工厂,让我们变压器生产与制造工艺等有了或多或少的了解与认识。
在此次企业课程中,我们看到了工厂对电机设备、变压器的设计以及制作,了解了这些设备的组成和运转过程,熟悉了设备的设计、制作、组装与调试。
相鼠笼式异步电动机实验报告

相鼠笼式异步电动机实验报告一、实验目的1、熟悉鼠笼式异步电动机的结构和工作原理。
2、掌握鼠笼式异步电动机的启动、调速和反转方法。
3、测量鼠笼式异步电动机的主要参数,如定子绕组电阻、转子绕组电阻、定子绕组漏抗、转子绕组漏抗等。
4、分析鼠笼式异步电动机的运行性能,如效率、功率因数、转矩等。
二、实验设备1、鼠笼式异步电动机一台。
2、交流电压表、交流电流表、功率表各一块。
3、变阻器、调压器各一台。
4、示波器一台。
三、实验原理1、鼠笼式异步电动机的结构鼠笼式异步电动机由定子和转子两部分组成。
定子由定子铁芯、定子绕组和机座组成,定子绕组是三相对称绕组,通入三相对称交流电时会产生旋转磁场。
转子由转子铁芯、转子绕组和转轴组成,转子绕组是鼠笼型的,即由铜条或铝条组成的闭合回路。
2、鼠笼式异步电动机的工作原理当定子绕组通入三相对称交流电时,会产生一个旋转磁场。
旋转磁场切割转子绕组,在转子绕组中产生感应电动势和感应电流。
感应电流与旋转磁场相互作用,产生电磁转矩,使转子转动起来。
转子的转速总是小于旋转磁场的转速,因此称为异步电动机。
3、鼠笼式异步电动机的启动鼠笼式异步电动机的启动方法有直接启动和降压启动两种。
直接启动是将电动机直接接到电源上启动,这种方法简单,但启动电流大,一般适用于功率较小的电动机。
降压启动是通过降低电源电压来减小启动电流,常用的降压启动方法有星三角降压启动和自耦变压器降压启动。
4、鼠笼式异步电动机的调速鼠笼式异步电动机的调速方法有变极调速、变频调速和变转差率调速三种。
变极调速是通过改变定子绕组的极对数来改变电动机的转速,这种方法调速范围有限。
变频调速是通过改变电源频率来改变电动机的转速,调速范围宽,效率高,但成本较高。
变转差率调速是通过改变电动机的转差率来改变电动机的转速,常用的方法有串电阻调速和串级调速。
5、鼠笼式异步电动机的反转鼠笼式异步电动机的反转只要将三相电源中的任意两相调换即可。
四、实验步骤1、测量定子绕组电阻(1)将电动机定子绕组的三个引出端分别与变阻器的三个接线柱相连。
a三相鼠笼异步电动机的工作特性实验报告
异步电机实验报告课程名:电机学与电力拖动姓名:李静怡学院:电气工程学院班级:电气1108班学号:指导老师:郭芳2、屏上挂件排列顺序D34-2、D513、空载实验(1)按图4-3接线。
电机绕组为Δ接法(UN=220V),直接与测速发电机同轴联接,不联接校正直流测功机DJ23。
(2) 把交流调压器调至电压最小位置,接通电源,逐渐升高电压,使电机起动旋转,观察电机旋转方向。
并使电机旋转方向为正转(如转向不符合要求需调整相序时,必须切断电源)。
(3) 保持电动机在额定电压下空载运行数分钟,使机械损耗达到稳定后再进行试验。
图4-3 三相鼠笼式异步电动机试验接线图(4) 调节电压由倍额定电压开始逐渐降低电压,直至电流或功率显著增大为止。
在这范围内读取空载电压、空载电流、空载功率。
(5) 在测取空载实验数据时,在额定电压附近多测几点,共取数据7~9 组记录于表4-4中。
表4-4序号UOC(V)IOL(A)PO(W)cos UABUBCUCAUOLIAIBICIOLPIPIIPO 1264265265251459146801479五、实验报告1.作空载特性曲线:I0、P、cos0=f(U0)2.作短路特性曲线:IK 、PK=f(UK)3.由空载、短路试验的数据求异步电机等效电路的参数。
(1)由短路试验数据求短路参数KIU=23KIP=22KKrZ-=KI=空载阻抗 ooo I U Z = 空载电阻 23oo o I P r =空载电抗 22o o o r Z X -=式中 U 0、I 0、P 0 —— 相应于U 0为额定电压时的相电压、相电流、三相空载功率。
由图中可以看出ooo I U Z =,为曲线斜率的倒数,所以Z 0=1/=(Ω)由图中可以看出23oo o I P r =,为曲线的斜率,即R K =(Ω)所以,22o o o r Z X -==(Ω)激磁电抗 σ1X X X O m -= 激磁电阻 23oI P r Fem ==(Ω)式中 PFe为额定电压时的铁耗,由图3-4确定。
(整理)电机实验——三相鼠笼异步电动机的工作特性

三相鼠笼异步电动机的工作特性一、实验目的1、掌握用日光灯法测转差率的方法。
2、掌握三相异步电动机的空载、堵转和负载试验的方法。
3、用直接负载法测取三相鼠笼式异步电动机的工作特性。
4、测定三相鼠笼式异步电动机的参数。
二、预习要点1、用日光灯法测转差率是利用了日光灯的什么特性?2、异步电动机的工作特性指哪些特性?3、异步电动机的等效电路有哪些参数?它们的物理意义是什么?4、工作特性和参数的测定方法。
三、实验项目1、测定电机的转差率。
2、测量定子绕组的冷态电阻。
3、判定定子绕组的首末端.4、空载实验。
5、短路实验。
6、负载实验。
四、实验方法1、实验设备2、屏上挂件排列顺序DQ43、DQ42、DQ25-3、DQ22、DQ27、DQ31 三相鼠笼式异步电机的组件编号为DQ11。
3、用日光灯法测定转差率日光灯是一种闪光灯,当接到50H z 电源上时,灯光每秒闪亮100次,人的视觉暂留时间约为十分之一秒左右,故用肉眼观察时日光灯是一直发亮的,我们就利用日光灯这一特性来测量电机的转差率。
(1)异步电机选用编号为DQ11的三相鼠笼异步电动机(U N =220V ,Δ接法)极数2P=4。
直接与测速发电机同轴联接,在DQ11和测速发电机联轴器上用黑胶布包一圈,再用四张白纸条(宽度约为3毫米),均匀地贴在黑胶布上。
(2)由于电机的同步转速为 ,而日光灯闪亮为100次/秒,即日光灯闪亮一次,电机转动四分之一圈。
由于电机轴上均匀贴有四张白纸条,故电机以同步转速转动时,肉眼观察图案是静止不动的(这个可以用直流电动机DQ09、DQ19和三相同步电机DQ14来验证)。
(3)开启电源,打开控制屏上日光灯开关,调节调压器升高电动机电压,观察电动机转向,如转向不对应停机调整相序。
转向正确后,升压至220V ,使电机起动运转,记录此时电机转速。
(4)因三相异步电机转速总是低于同步转速,故灯光每闪亮一次图案逆电机旋转方向落后一个角度,用肉眼观察图案逆电机旋转方向缓慢移动。
三相鼠笼式异步电动机启动方式分析
OCCUPATION1 02010 3资源,而应想法子将这些资源应用到教学中去。
5.建立“从做中学”的制度在职业教育中逐步推行“校企”合作制度,使学生学过知识后,有“用武”之地。
以湖南的校企合作发展为例,现已建立起18个职业教育集团,使学生在寒暑假能去工厂见习、实习,让学生能把一个学期所学的知识,充分运用到生产实践中去,通过生产实践又反过来影响其知识理论的提高。
这样,在学生毕业的时候,企业能找到自己需要的人才,而学生也可以顺利实现自己的就业,在职业生涯中走得更顺利。
6.虚拟实验软件的开发在设备条件不能满足某些恶劣工作环境的操作情况下,可以采取开发更多虚拟软件的办法,使学生在实验里也可以体会到和真实工作环境一样的情境。
例如,数控专业中的一些设备比较昂贵,学校不可能达到每人一台数控机器的条件。
在这种情况下,可以通过众多学校联合集中开发虚拟实验软件的办法解决此问题。
7.更加注重学生协作学习和协作学习能力的培养在工作中,没有一个人能包揽一切,只有会合作的人才能获得职业生涯的成功。
然而,目前的职业教育一般都强调个人去完成某项任务,而不是通过集体共同去完成某项任务。
对此,在培养将来的“职业”人才时,应根据学生的学习兴趣设立各个合作的小组,让他们在学习中不断合作,完成他们共同的学习技能目标。
8.进一步提高“双师型”教师的比例引进一批企业中的工程师、技师来院校教学,让他们“走进来”。
同时,让学校的教师“走出去”,如组织教师定期去企业顶岗学习。
通过这两个途径,使学校的教师既能教授书本知识,又能传授实际的技能。
9.建立以完成某个实际任务为考试方式的制度目前,在职业教育考试中,主要是针对学生基础理论的考察。
在今后的职业教育发展中,如果能以具体的技能操作为考试形式,就可以进一步加强学生以任务为中心的学习目的,更加注重职业能力的培养,而不仅是书本上的文字记忆。
10.树立学生终生学习、信息化学习的意识科学和技术的发展日新月异,不可能指望“一技定终身”。
三相鼠笼式异步电机工作原理

三相鼠笼式异步电机工作原理三相鼠笼式异步电机是目前工业和民用领域使用最为广泛的电机之一。
它适用于各种功率等级,广泛应用于机器制造、电力、交通、建筑、矿山等各个领域。
本文将介绍三相鼠笼式异步电机的工作原理。
一、三相鼠笼式异步电机基本构造三相鼠笼式异步电机的基本构造由固定部分和旋转部分组成。
其固定部分又称为定子,由铁心、绕组和端盖等组成;旋转部分又称为转子,由铁心和根据不同型号而有所不同的铝或铜向外突出的鼠笼形导条所组成。
转子可分为两类,一类是短路转子(又称鼠笼转子),另一类是抽象极转子。
二、三相鼠笼式异步电机工作原理三相鼠笼式异步电机是一种交流电动机,其工作原理是依据异步电动机的运行原理。
异步电动机的运行是通过定子上交变电磁场与转子中感应电动势作用产生的扭矩来实现的。
1. 定子产生旋转磁场三相交流电压AC在定子上的三个绕组(也称为初始绕组)间轮流通电,分别形成三个简单的旋转磁场,这三个旋转磁场相互距离相等,夹角为120度,并沿着定子的纵轴线旋转。
这个旋转磁场是由定数上的电流所产生的,定子上的电流也是由交流电压所引起的。
2. 转子中产生感应电动势由于变化的磁场,在转子中感应出一电流。
这不仅有能量损失,也会导致电机损耗。
这时电动磁通的作用在转子中生成感应电流,而感应电流在旋转磁场的作用下将受到些方向和大小变化的力的作用,使它绕着定子的纵轴线旋转。
3. 定子和转子的同步速度不同定子两个极间的电磁场总是与转子上的导条彼此交错。
当变化的磁场转动时,导条内的电流也会随之偏转。
由于旋转磁场的旋转速度不同于转子的旋转速度,导致在转子中形成了电流的旋转磁场,与定子电磁场方向相对。
在理论上,如果转子的旋转速度与电磁场的旋转速度相同,那么就可以获得最大扭矩。
4. 转子受到的力和扭矩在实际情况中,转子的旋转速度比电磁场的旋转速度稍慢一些,导致效率稍微降低。
由于定子和转子之间的磁场之间的相对滞后,产生了导电节团中的电流旋转磁场,电机的转动根据力矩计算,可得到最大扭矩的产生时刻,此时转子的旋转速度与电磁场的旋转速度相同。
鼠笼异步电动机常见故障的分析与诊断

鼠笼异步电动机常见故障的分析与诊断作者:吴俊复来源:《报刊荟萃(下)》2017年第12期摘要:本文针对鼠笼异步电动机的常见故障,以及故障的诊断方法进行了详细研究。
分别从定子铁芯、绕组绝缘、鼠笼转子、转子轴承等方面对常见故障进行了分析,并针对不同故障进行了有效地处理。
在故障诊断方法中,对局部放电检测、断相故障保护、过载故障保护进行了具体地分析与介绍。
以进行电动机综合故障诊断。
关键词:鼠笼异步电动机;故障分析;故障诊断1鼠笼异步电动机常见故障的分析1.1 定子铁心故障除了制造过程本身存在的问题外,定子铁心故障大多是由穿转子过程中的损伤或电机摩擦、剧烈振动导致的片间绝缘损坏造成的,多发生在齿顶部分。
由于鼠笼电动机气隙较小,装配不当、轴承磨损、转轴弯曲及单边磁拉力等都可能造成定转子相摩擦,损坏绝缘。
这种故障的征兆是空载电流加大,振动和噪声增大,出现大的环路电流,铁心温度升高,同时绝缘材料出现高温分解现象。
由于通过铁损试验可以及时发现隐患,因此该故障实际上较少发生。
1.2绕组绝缘故障电机本身在机械和电气方面最为薄弱的部分之一就是绝缘系统,绕组绝缘老化、磨损、过热、受潮、污染及机械和电磁应力的作用,都会导致绝缘电阻下降直至绝缘击穿。
鼠笼异步电动机的工作条件往往较差,易受外界环境影响而导致绝缘故障其征兆是电机内活动性放电量增加,绝缘电阻降低,泄漏电流增大,耐压水平降低。
1.3鼠笼转子故障虽然鼠笼异步电动机的转子绕组很坚固,但是导致转子故障的某些缺陷(例如铸件不合格、焊接不良和转子强度不够等)可能在制造过程中就已存在。
鼠笼异步电动机的频繁起动、制动和重负载运行都会使笼条和端环承受较大的热应力和机械应力,导致鼠笼疲劳断裂。
转子鼠笼故障的早期征兆是电机起动时间长,力矩减小,振动和噪声增大,电机转速、定子电流出现脉动现象。
1.4转子轴承故障电动机的转子在工作中要承受各种复杂和交变的应力,容易发生各种故障。
转子上零件的脱落和松动会造成转子失衡,转子偏心会产生不对称电磁拉力,而转轴弯曲、轴颈椭圆及轴承故障等都将使电动机振动增加。
《电机与拖动》异步电机---三相鼠笼异步电动机的工作特性实验
《电机与拖动》异步电机---三相鼠笼异步电动机的工作特性实验一、实验目的1.掌握三相异步电机的空载、堵转和负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相笼型异步电动机的参数。
二、预习要点1.异步电动机的工作特性指哪些特性?2.异步电动机的等效电路有哪些参数?它们的物理意义是什么?3.工作特性和参数的测定方法。
三、实验项目1.测量定子绕组的冷态电阻。
2.判定定子绕组的首未端。
3.空载试验。
4.短路试验。
5.负载试验。
四、实验设备及仪器1.实验台主控制屏2.电机导轨及测功机、矩矩转速测量组件(NMEL-13A)3.交流电压表、电流表、功率、功率因数表4.直流电压、毫安、安培表5.直流电机仪表、电源6.三相可调电阻器900Ω(NMEL-03)7.波形测试及开关板(NMEL-05B)8.电机起动箱(NMEL-09)9.三相鼠笼式异步电动机M04五、实验方法及步骤1.测量定子绕组的冷态直流电阻。
准备:将电机在室内放置一段时间,用温度计测量电机绕组端部或铁芯的温度。
当所测温度与冷动介质温度之差不超过2K时,即为实际冷态。
记录此时的温度和测量定子绕组的直流电阻,此阻值即为冷态直流电阻。
(1)伏安法S1,S2:位于NMEL-05B。
R:四只900Ω和900联(NMEL-03)。
A、V:或采用NMEL-06量程的选择:测量时,因而直流毫安表的量程用为50欧姆,因而当流过的电流为50mA时电压约为2.5伏,所以直流电压表量程用20V档,实验开始前,合上开关S1,断开开关S2,调节电阻R至最大(3600Ω)。
分别合上绿色“闭合”按钮开关和220V直流可调电源的船形开关,按下复位按钮,调节直流可调电源及可调电阻R,使试验电机电流不超过电机额定电流的10%,以防止因试验电流过大而引起绕组的温度上升,读取电流值,再接通开关S2读取电压值。
读完后,先打开开关S2,再打开开关S1。
调节R使A表分别为50mA,40mA,30mA测取三次,取其平均值,测量定子三相绕组的电阻值,记录于表3-1中。
三相鼠笼式异步电动机实验报告

三相鼠笼式异步电动机实验报告一、实验目的1、熟悉三相鼠笼式异步电动机的结构和工作原理。
2、掌握三相鼠笼式异步电动机的启动、调速和反转方法。
3、学会使用相关仪器仪表测量三相鼠笼式异步电动机的各项参数。
4、通过实验数据的分析,加深对三相鼠笼式异步电动机运行特性的理解。
二、实验设备1、三相鼠笼式异步电动机一台2、交流电压表、交流电流表、功率表各一块3、三相调压器一台4、电机导轨及测速发电机5、示波器一台三、实验原理三相鼠笼式异步电动机的工作原理基于电磁感应定律。
当定子绕组通以三相交流电时,会产生一个旋转磁场。
这个旋转磁场切割转子导体,在转子导体中产生感应电动势和感应电流。
由于转子电流与旋转磁场相互作用,从而产生电磁转矩,使转子转动起来。
异步电动机的转速与旋转磁场的转速(同步转速)存在差异,其转差率 s 表示为:\s =\frac{n_0 n}{n_0}\其中,\(n_0\)为同步转速,\(n\)为电动机的转速。
四、实验内容及步骤1、测量定子绕组的直流电阻用万用表测量电动机定子绕组的电阻,每相测量三次,取平均值。
2、空载实验按图连接好电路,将调压器输出电压调至零位。
合上电源开关,逐渐升高电压,使电动机空载运行,观察电动机的运转情况。
当电动机转速稳定后,记录此时的电压、电流和功率。
逐步降低电压,直至电动机停止运转,记录相关数据。
3、短路实验将电动机转子堵住,不使其转动。
合上电源,逐渐升高电压,使定子电流达到额定值附近,记录此时的电压、电流和功率。
4、负载实验在电动机轴上安装带轮,通过皮带与测功机相连。
调节调压器,使电动机在额定电压下运行,逐渐增加负载,记录不同负载下的电压、电流、功率和转速。
5、调速实验改变电源电压,观察电动机转速的变化。
接入串电阻调速电路,观察转速的变化。
6、反转实验调换三相电源的任意两相,观察电动机的转向变化。
五、实验数据记录与处理1、定子绕组直流电阻定子绕组 A 相电阻:_____Ω定子绕组 B 相电阻:_____Ω定子绕组 C 相电阻:_____Ω2、空载实验电压(V):_____、_____、_____ 电流(A):_____、_____、_____ 功率(W):_____、_____、_____3、短路实验电压(V):_____ 电流(A):_____ 功率(W):_____4、负载实验负载(N·m):_____、_____、_____ 电压(V):_____、_____、_____ 电流(A):_____、_____、_____ 功率(W):_____、_____、_____ 转速(r/min):_____、_____、_____5、调速实验电源电压降低时,转速(r/min):_____、_____、_____接入串电阻调速时,转速(r/min):_____、_____、_____6、反转实验调换电源相序前,电动机转向:_____调换电源相序后,电动机转向:_____根据实验数据,绘制相关曲线,如空载特性曲线、短路特性曲线、负载特性曲线等,以便更直观地分析电动机的性能。
三相鼠笼异步电动机的工作特性实验报告
三相鼠笼异步电动机的工作特性一.实验目的1.掌握三相异步电机的空载、堵转和负载试验的方法。
2.用直接负载法测取三相鼠笼异步电动机的工作特性。
3.测定三相笼型异步电动机的参数。
二.实验项目1.空载试验。
2.短路试验。
3.负载试验。
三.实验设备及仪器1.NMCL系列电机教学实验台主控制屏。
2.电机导轨及测功机、矩矩转速测量(MMEL-13)。
3.交流功率、功率因数表(MMEL-001A)。
4.直流电压、毫安、安培表(MMEL-06)。
5.三相可调电阻器900Ω(NMEL-03)。
6.旋转指示灯及开关(MMEL-05B)。
7.三相鼠笼式异步电动机M04。
四.实验方法及步骤1.空载试验测量电路如图3-3所示。
电机定子绕组接线如图3-4所示,电机绕组为△接法(U N=220伏),S开关扳到左边,且电机不同测功机同轴联接,不带测功机。
a.起动电压前,把交流电压调节旋钮退至零位,然后接通电源,逐渐升高电压,使电机起动旋转,观察电机旋转方向。
并使电机旋转方向为正。
b.保持电动机在额定电压下空载运行数分钟,使机械损耗达到稳定后再进行试验。
c.调节电压由1.2倍额定电压开始逐渐降低电压,直至电流或功率显著增大为止。
在这范围内读取空载电压、空载电流、空载功率。
表3-3序号U OC(V)I OL(A)P O(W)cosϕU AB U BC U CA U OL I A I B I C I OL P I P II P O1 220 220 220 220.000 0.274 0.281 0.276 0.277 -20.7 37.02 16.32 0.472 264.1 265 263.1 264.067 0.339 0.352 0.345 0.345 -32.4 54.07 21.67 0.463 180.5 180.8 180 180.433 0.224 0.223 0.224 0.224 -12.9 25.10 12.2 0.444 140.3 140 139.7 140.000 0.176 0.174 0.175 -6.82 15.97 9.15 0.425 100.8 99.65 99.92 100.123 0.135 0.133 0.130 0.133 -2.48 9.11 6.63 0.46 60.63 58.96 59.5. 59.795 0.110 0.102 0.097 0.103 0.23 4.74 4.97 0.377 20.91 18.84 19.32 19.690 0.079 0.074 0.669 0.274 -0.27 0.80 0.53 0.342.短路实验a.将起子插入测功机堵转孔中,使测功机定转子堵住将三相调压器退至零。
鼠笼式电机
三相鼠笼式异步电动机的工作原理(一)编者按应广大读者的要求,报纸从本期开始将陆续刊登进网作业电工考试的相关实用技术内容,方便读者提高实战技能。
图2 磁场方向的变化情况撰文陆荣华问:三相鼠笼式异步电动机内旋转磁场产生的原因?答:鼠笼式异步电动机结构简单、制造容易、成本低、运行维护方便,它被广泛地应用在工农业生产中,作为电力拖动的原动机。
它的缺点是调速性能差,启动力矩较小,因此在一些要求平滑调速和启动力矩很大的场合常用其他类型电动机来完成。
在三相鼠笼式电动机的定子槽中嵌有空间互差120度的三相绕组。
当三相绕组接上对称的三相电源时,在电动机内会产生一个旋转磁场。
在旋转磁场作用下,转子鼠笼条中就会产生感应电动势和感应电流(因为鼠笼条两端由短路环连接,形成了闭合电路)。
这时鼠笼条在磁场中会受到力的作用,通过分析可知,电动机转子在这些力的作用下,便转动起来。
现在先分析三相定子绕组通上对称三相交流电后,产生旋转磁场的原理。
设电动机三相绕组接成星形接线,接上对称三相交流电源后,电流为正值时,电流从绕组的头端进去尾端出来;电流为负值时,电流从绕组的尾端进去头端出来。
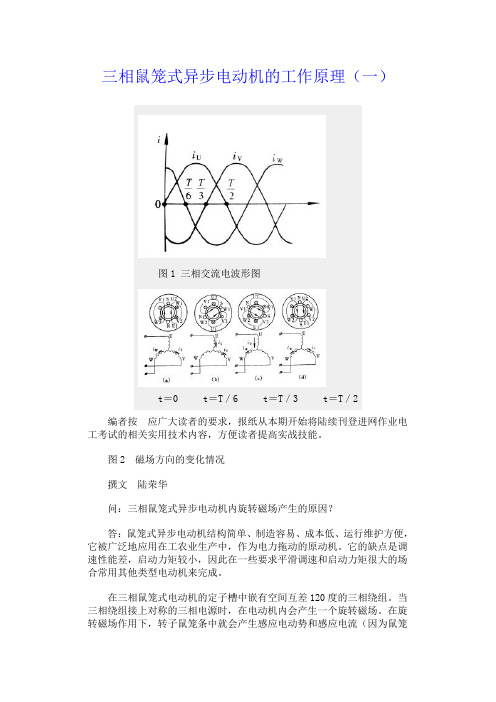
现在假定通入三相绕组的对称三相交流电的波形如图1所示,则电动机三相绕组电流通入情况如图2所示。
从图2(a)可看到:在t=0瞬间,iu=0,绕组U1—U2中无电流流过;而这瞬时iv为负值,绕组V1—V2中电流由V2进Vl出;这瞬时iw为正值,绕组W1—W2中电流由W1进W2出。
用右手定则可判断,此时电动机中会产生如图2(a)所示磁场,其合成磁场方向向上。
从图2(b)可看到:在t=T/6瞬间,iw=0,绕组W1—W2中无电流流过;这瞬间iv为负值,绕组V1—V2中电流从V2进V1出;这瞬时iu为正值,绕组U1—U2中电流由U1进U2出。
此时电动机内磁场分布如图2(b)所示,其合成磁场方向较t=0时刻顺时针方向旋转了一定角度。
从图2(c)可看到:在t=T/3瞬间,此时iv=0,绕组Vl—V2中无电流通过;这瞬时iu为正值,绕组U1—U2中的电流从U1进U2出;这瞬时iw 为负值,绕组Wl—W2中电流从W2进W1出。
鼠笼型异步电动机振动原因分析及处理方法
鼠笼型异步电动机振动原因分析及处理方法异步电动机是火力发电厂大量应用的动力设备,它们的安全稳定直接决定着发电机组的可靠运行。
而振动是电动机经常发生的重要故障或缺陷之一,本文主要针对Y厂三台机组的异步电动机的运行状况进行振动原因分析,并总结经验,提出对策。
1 异步电动机振动产生的主要原因:1.1 机械方面原因:(1)轴承磨损,间隙不合格;(2)转子或风扇不平衡;(3)基础强度不够;(4)与机械部分找正不好;(5)转轴弯曲;1.2 定、转子本体方面原因:(1)笼型转子笼条与端环处开焊、断条;(2)笼型转子铁芯松动,沿轴向移动;(3)定、转子间隙不均匀;(4)定子绕组直流电阻不平衡2 机械原因造成电动机振动分析对于由于机械方面原因引起的振动,可以说无论从判断到处理相对要容易一些。
由于轴承因质量问题或缺油磨损而导致电机振动时,我们现场可以根据声音进行判断,用金属棒可以明显听到轴承室有金属磨擦或较刺耳的尖叫声,这种情况我们需要及时将电机停下来,更换新轴承并加入合格、适量的润滑脂,问题就可以解决了。
电机由于转子配重块脱落或铸铝风扇叶折断造成动平衡不好而引起振动,这类问题电机解体后很容易就能发现,那么经过重新补焊配重块或更换新风扇就可以解决。
有时电机振动是由于基础不牢而引起的,这类情况可以明显感觉到电机基础部分在随着电机同频率振动,这就需要将电机基础重新夯实、加固,问题自然可以得到解决。
还有电机运行时振动明显,可解开对轮后空载试运时振动消失,这就是机械找正存在问题。
需要机械方面重新找正,即找好中心。
对于一些电机由于转轴弯曲而产生振动的,则要对电机进行直轴处理。
直轴要加热后进行,热态直轴有两种方式:一种是先加压力再加热来直轴,另一种是先加热再加压力来直轴。
对于弯曲严重的转轴最好采用先加热后加压的方法,然后再通过测试动、静平衡或放到车床上打表来检测直到合格为止。
上述机械原因引起的振动多发生在中小型异步电动机上,并且故障部位直观、易发现,而且处理起来比较容易,同时如果发现、处理及时也不会造成严重后果。
鼠笼式电动机故障原因及维护分析

连续处理几天后,故障仍未解决。班组人员在帮助处理
及接线盒内接线是否出现短路,检查保险容量是否合
时发现,电机气隙非常大,瓦座水平也不合格,故障原
适,定子绕组可用摇表遥测其绝缘电阻,判断是否发生
[3]
因找到后,重新调整各部间隙后,电机试转一次成功 。
(3) 负载机械部分检查正常,电机本身也没有问题,引
起故障的原因是连接部分造成的,这时要检查电机的基
条,不要将铁芯或转轴焊变形。
的情况下谨慎使用浇水的方式给电机降温。
(4) 电源电压过高或三相电压不平衡。电压过高或
1.4 电机外壳带电
三相电压不平衡也会引起电动机发出“嗡嗡”的异响
电机外壳带电主要有电源相线与中心线接错;绕组
声,但这种原因往往不是用户所能决定的,与供电质量
受潮,绝缘老化,大电流造成对地短路;保护地线开路
而导致低压电机的输出功率不足。当低压电机出现输出
爪子”“羊尾巴”,不能出现毛疵,以免和接线盒发生接
功率不足时,会发出低沉的噪声、运转速度变慢、电机
触。同时,每个周期内严重等 。
电机相间、对地进行绝缘摇测,对绝缘低的电机应及时
1.2 运行中剧烈震动
structure and principle, low cost and low maintenance cost. While providing convenience for daily production, squirrel-cage motors are also
prone to failure. The reasons for common failures of squirrel cage motors and the maintenance methods were discussed. Through the analysis of
绕线电机和鼠笼电机区别
绕线电机和鼠笼电机区别鼠笼电机转子不需要与外电路连接,由于其内部已经构成电流闭合通路。
为了降低启动电流,增加启动转矩,绕线电机的转子一头星接,而另一面要通过滑环,炭刷与外电路连接,由于其内部未构成电流闭合通路,外电路是指电阻、频敏变阻器等。
鼠笼式转子用铜条安装在转子铁芯槽内,两端用端环焊接,外形像鼠笼。
中小型转子一般采纳铸铝方式。
绕线式转子的绕组和定子绕组相像,三相绕组连接成星形,三根端线连接到装在转轴上的三个铜滑环上,通过一组电刷与外电路相连接。
由于鼠笼式电机结构简洁、价格低,掌握电机运行也相对简洁,所以得到广泛采纳.而绕线式电动机结构简单,价格高,掌握电机运行也相对简单一些,其应用相对要少一些.但绕线式电动机由于其启动,运行的力矩较大,一般用在重载负荷中.鼠笼式电机的三相绕组一般来说功率大于3KW都接成角形,而电机功率小于3KW的一般都接成星形.鼠笼式异步电动机的优点是结构简洁,启动便利,运行牢靠,体积小,结实耐用,便于维护、检修和安装,成本低等。
缺点是启动转矩较小,功率因数较低,转速不易调整,直接启动时启动电流大。
绕线式异步电动机的优点是通过在转子回路中串入外加电阻可以改善电动机的启动和调速性能。
缺点是结构简单,维护较麻烦,运行牢靠性较差,价格较贵。
鼠笼式电动机和绕线电动机的定子基本上是一样的,区另在于转子部分。
鼠笼式电动机转子为笼式的导条。
导条通常为铜条,导条安装在转子铁芯槽内,两端用端环焊接,外形像鼠笼。
中小型转子一般采纳铸铝方式。
由于该导条外形与鼠笼相像,故称之为鼠笼式异步电动机。
电动机在定子绕组加三相沟通电后,会形成旋转磁场,其转子上的闭合的导条会由于切割定子磁场的磁力线而感应出电势和电流,而带电的导体在磁场中就会产生运动,电动机转子就旋转起来了。
这就是鼠笼式三相异步电动机的工作原理。
绕线式转子的绕组和定子绕组相像,三相绕组连接成星形,三根端线连接到装在转轴上的三个铜滑环上,通过一组电刷与外电路相连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子
笼型转子
11
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子的极数
笼型转子的极 数自动与定子 极数相匹配。
2极
F2 ns
Bm 2极
I2 E2
n1
······· + + + + + + +
电机学
绕线型转子
8
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
绕线型转子
绕线型转子通过滑环(集 电环)把三相绕组引出。
转子绕组通过适当连接, 使其极数与定子极数一样。
9
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
16
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子参数的归算
电 流 比 :ki
m1 N1k N 1 m2 N2kN 2
m1N1kN1 Q2 1 1
2 pm1N1kN1 Q2
p2
RX'' k kk kRX 电压比:ke
N2 1kN1 N 2kN 2
2
电机学
笼型转子参数的归算
端环→导条
导条
端环
端环参数:RR、XR 导条参数: RB、XB
15
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子参数的归算
导条
端环
相位差: 2
p 360 Q2
R'R
RR 4 s in 2
2
,X
'R
XR
4sin2 2
2
2
R2 RB 2R'R X 2 X B 2X 'R
电机学
绕线型与笼型感应电机
定子铁心与定子绕组相同,
仅仅是转子部分不同。
5
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
绕线型转子
6
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
绕线型转子
7
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
p1=p2,是所有旋转电机产 生恒定电磁转矩、正常运行
的必要条件。
3
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
电机的相数问题
定子相数:m1 转子相数:m2 m1与m2,可以相等,也可
以不相等。
4
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
e
Ni1k N21
1 e2
i1
2N1kN1 2
阻抗比:keki
m1 m2
N1k N 1 N 2kN 2
2
4 pm1 N1kN1 Q2
2
17
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
18
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
Electrical Machinery
自动化系温志明 2012
电机学
本节内容
电机的极数问题 电机的相数问题 绕线型转子 笼型转子 笼型转子参数的归算
2
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
电机的极数问题
定子极对数:p1
转子极对数:p2
S
N
绕组:kp2=1,kd2=1,kN2=1。
13
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子参数的归算
归算思路: 1. 将端环参数归算为导条参数; 2. 将转子绕组参数归算到定子方。
14
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
90° ψ2
12
电机学教案, 太原工业学院自动化系 温志明,wasxty_99@
电机学
笼型转子
导条
端环
特点:所有导条在两头被端环短 路,整个结构对称。
Q2:转子导条数或槽数。
极对数:自动与定子磁场的极对 数相匹配,p2=p1=p。
相数:m2=Q2 /p。 匝数:N2=1/2。