感应电机无速度传感器直接转矩控制的智能优化设计
新型无传感器感应电动机直接转矩控制系统
第3 4卷
第 5期
新 型 无 传 感 器 感 应 电 动 机 直 接 转 矩 控 制 系统
万 军 , 吕值 敏
( 重 庆 科创 职 业学 院机 电工 程 学 院 ,重 庆 永川 4 0 2 1 6 0 )
[ 摘
要] 针对 电机 安装机 械传 感 器不便 的 问题 提 出 了新 的速 度 辨识 方 法. 从 自适 应控 制 原理
证和 比较.
到 的 电压 、 电 流信 号 计 算 为 电机 的 磁 链 和转 矩 ,
通过 B a n g—b a n g控 制 , 实 现 磁 链 和 转 矩 的 直 接
1 异 步 电动 机 数 学模 型
在 一 坐标 系下 , 感应 电机 的定 子 电流 、 磁 链、 转子 转速 方程 可 以描 述 为 :
优 于 EK F.
[ 关键 词 ] 感应 电动机 ; 直接 转 矩控 制 ; 参 数估 算 ; MA R S ; E K F
[ 中图分 类号 ] T M3 4 6 [ 文献标 志码 ] A [ 文章编 号 ] 1 6 7 3— 8 0 0 4 ( 2 0 1 5 ) 0 5— 0 0 5 0— 0 5 直接转 矩 控 制 ( D T C) 是继 矢 量 控 制 后 发 展 起 来 的新 型交 流调速 控制 方法 , 它 采用 空 间 电压 矢量( S V C ) 方法 , 直 接在 定 子坐 标 系下 将检 测 得 提 出一种新 型 的速度估 计方 法 , 并 在相 同条 件下 , 对I M的 D T C中两 种不 同的非线 性传 感器 进行 验
1
一 一
控制. 它摒 弃 了矢 量 控 制 中复 杂 的 解 耦 计算 , 其 优 点是 有快 速 的转矩 响应 和 良好 的动态 性 能 , 但
基于智能算法的无速度传感器直接转矩控制系统的设计
下面采用完全递归神经网络来构造转速辨识器
假设 0为 电机 转 子 磁链 矢 量 与 a轴之 间 的
22 递 归神经 网络速 度辨识器 的设计 .
0 at ̄%1 =r ng c a
非 线性 映射关 系
6( ) ( 0 足 =f , , J 。6 ( , 壶一1 ) 0 )
( 1 1)
霞
式 中 T =L / 为转子 时间常 数 . R
瞬 时 电角 度 , 则
L1 m … I
这种非线性映射关系可以用递归神经网络实现 . 递归神经网络具有较强的表达和处理瞬态信息 的能力 , 适于解决非线性动态辨识与控制问题。
维普资讯
第2 1卷
第 4期
沈
阳
化
工
学
院
学
报
V 12 N o. 1 o4 Dc20 e 0 7
20 .2 0 7 1
J OUR NAL OF S EN NG TI UT EMI AL T CH H YA I NS T E OFCH C E NOL X Y (3
文 章 编 号 : 10 —4 3 (0 70 —0 0 —0 0 4 6 92 0 )4 3 3 7
基 于 智能算 法 的 无速 度传 感器 直 接转 矩控 制 系统 的设 计
李 彬 , 樊立萍
( 沈阳化工学 院 信息工程学 院,辽宁 沈阳 10 4 ) 1 12
摘 要 : 为 了 改善 定 子 电 阻对 定 子 磁 链 的 影 响 以 及 电机 的 低 速 性 能 , 出一 种 利 用 模 糊 神 经 网 提
L
0
0
L
式 中 : … i 分别 为定 子 a轴 的电压 和电流 ; “ a s “ 口 s 为定子 卢轴 的 电压 和 电流 ; 分别
基于DSP的无速度传感器直接转矩控制系统设计
( 家庄铁 道 学院 石 分院. 北 河 石家庄 电 气 工 程 004 ) 5 0 3
Li ng c u QJ - hua Zh n, ang F s u. hen g
( h o f lc r a n i e r ia Sc o l e t c l g n e j — oe i e Sh i
系 统 中 , 速 度 闭 环 是 必 不 可 少
2 直 接 转 矩 控 制 的原 理 ,
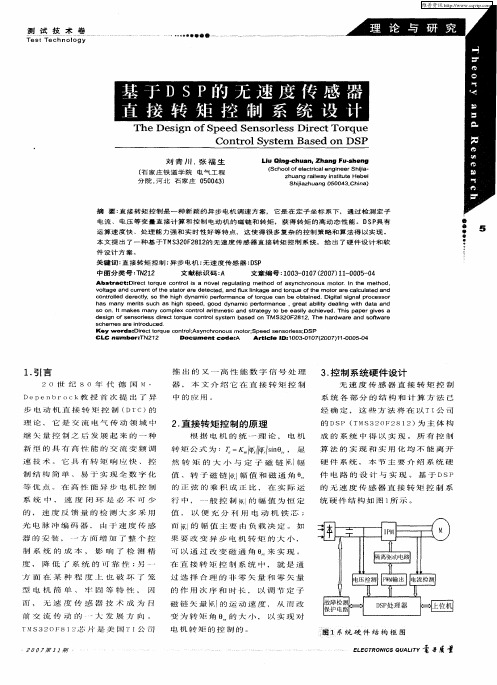
本文提 出 了一种基 于T 3 02 1 的无速 度传 感器直 接 转矩 控制 系统, 给 出了硬件 设计 和软 HS 2 F 8 2 件 设计 方案 。 关 键 词 : 接 转 矩 控 制 : 步 电 机 ; 速 度 传 感 器 ; S 直 异 无 DP
中 图 分 类 号 :N 1 T2 2
謦
豢
掌
t
电 流 、 电压 等 变 量 直 接 计 算 和 控 制 电 动 机 的 磁 链 和 转 矩 , 获 得 转 矩 的 高 动 态 性 能 。 D 具 有 SP 运 算 速 度 快 、 处 理 能 力 强 和 实 时 性 好 等 特 点 , 这 使 得 很 多 复 杂 的 控 制 策 略 和 算 法 得 以实 现 。
文 献 标 识 码 : A
文章 编 号 : 0 3 0 0 ( 0 7 1 — 0 5 0 10- 1 720 )10 0-4
A bst ract= r t t que Diec or con r i novel egul i m et t ol s a r atng hod of as ync onou m ot .I he m e hod, hr s or n t t v t olage and cur en ft t or ar r t o he s at e det ed,and fu l age and t que o he m ot e c cu at ect x i l nk or ft orar al l ed and
一种改进的异步电机无速度传感器的直接转矩控制系统
关键 词 :直接转矩控制 异步电动机 磁链辨识 模型参考 自适应系统 模 糊控制
[ 中图分类号]T 4 [ M33 文献标志码 ]A [ 文章编号]10 3 8 (0 2 0 0 1 3 00— 86 2 1 )4- 03—0
An I r v d Id c i n Mo o e d S n o ls r c r u n r l s e mp o e n u t t rSp e e s r s Di tTo q e Co to o e e Sy t m
c nr le o rdu e t Ipa a ee so h pe d nc n t y t m a a tr o i o e t e o a e o he whoe c n r l o tol rt e c he P rm t r ft e de n e e o he s se p r mee s t mprv he p r r nc ft f m l o to
() 3
(响应迅速 , 是一种具有高静 、 动态性 能
的交流调速方法 。在高性能 的 D C中, T 转速 的闭环控制环 节
一
般是必不 可少 的。通 常采用光 电编码 器等速度 传感器 来进 行
电磁转矩方程 :
Li +Li , ,
转 速检测 , 但速度传感器 的使用增加 了系统 的安装 难度及 成本 。 本 文用一种新 的磁链 观测方案 观测定子磁链 , 并将其作为参考 模型, 构成新 的模 型参考 自适 应 系统 M A ( d l e rneA R S Moe R f ec . e d p v yt , 以在全速度范围 内准确辨识速度 , at eSs m) 可 i e 同时用模 糊 速度调节器代替传统 P 调节器 , I 进一步 改善 了直接转 矩控 制 在全速范围 内的性能 , 尤其是极低速 的性能 。
无速度传感器的PMSM最优转矩控制系统研究
( a ut fE e t cl& C n r l n ie r g i nn c nc l i ri ,Hu u a 2 1 5 hn ) F c l o l r a y ci o to E gn e i ,L a ig Teh i v s y n o a Un e t l d o 1 5 0 .C ia
传统 上多 采用 光电编 码器或 旋转 变压器 等机 械传 感器 , 不仅增 大 了 电机 的体积 和成本 , 不适应 恶 且 劣 的工作环 境 , 电机 易受干 扰 。 目前 , 使 电机控 制
系统 中机械 传感器 的存 在阻碍 了电机 向高速化 和
小型 化发展 。因此 , 传 感器 技 术 的研 究 在 高 速 无
Abs r c :Fora no — p e ~ e or s s e m o e ,t e PM SM ta t n s e d s ns y t m d l h mod la he o tma o q o r s e nd t p i lt r ue c ntoli a ple p id.W e b l uid a mod lr f r nc efa a i on r le o e tma e t e s e d a oston Bot e e e e e s l— d ptve c t o l r t s i t h p e nd p ii . h t t o y nd i u a i r s ls h w t t he o r le i fe b e n wih h s tsa t y he he r a sm l ton e u t s o ha t c nt o l r s lxi l a d t t e a if c or
直接转矩变结构控制的无速度传感器交流感应电机系统
薰
~
一
( 1 N o r t h w e s t e r n P o l y t e e h n i e a l U n i v e r s i t y, Xi a n 7 1 0 0 7 2, C h i n a ; 2 Xi a n Ae r o n a u t i e a l U n i v e r s i t y , X i a l l 7 1 0 0 7 2, C h i n a )
高精度控制要求。状态观测器是无速度传感器交流 褐 感应 电机控制策 略的重要组 成部分 , 其鲁棒 性和观
测 误差直接影响电机 的控制性能 。文献 [ 7 ] 针对感
应 电机提出全阶 自 适应 磁链 、 定子 电阻观测器 , 但其 连
运 算相对复杂 , 观测误 差较 大。文献 [ 8 ] 提出了速 度 自适应 滑模观 测器 , 该观测器 不需要确 切的 电机
謦彗 宴
一
2 0 1 4 萋 4 2 差 曼 鞠
一 m
一R n1 0
驱 动控制
/
= ,.
≈
R n
一 m R 2
R n 。
0 一 R 3
0 ]
R 。
1
(
。
s
—L c o s 日
)
} ( 1 4)
¨ _
m 一 m
_ , _( J L 一 m s i n 日 r ) l
= 0 , 则 =一 m ) 一 R J
一
一
_ 耄 Ⅲ _ 一 雪 l 山 0 匕 e - ㈦ j _ ㈣ 亘 m ~ 协 一
基于滑模观测器的感应电机无速度传感器直接转矩控制

基于滑模观测器的感应电机无速度传感器直接转矩控制孙振兴;张兴华【摘要】提出了一种定子磁链滑模观测器,该观测器以定子电流和磁链作为状态变量,利用电流观测误差时定子磁链观测值进行校正,采用李雅普诺夫理论证明了观测器是渐近收敛的.设计了基于定子磁链滑模观测器的感应电机无速度传感器的直接转矩控制系统,将磁链估计值用于对转速进行实时估计.实验结果表明,采用滑模观测器的感应电机无速度传感器直接转矩控制系统,具有转矩动态响应快,转速控制精度高和调速范围宽的特点.%In this paper, a novel sliding-mode observer for stator flux estimation is proposed. This observer employs stator currents and flux as the state variables, and uses the error of the stator current estimation to adjust the flux observer. The convergence of the observer is proved by Lyapunov's stability theory. Then, a speed sensor-less direct torque control system of induction motor drives based on the sliding-mode flux observer is designed, which uses the slip frequency method to calculate the speed on real time. The experimental results show that the proposed the control scheme possesses the features of fast torque response, accurate speed tracking and wide range of speed.【期刊名称】《电工电能新技术》【年(卷),期】2012(031)004【总页数】5页(P29-33)【关键词】感应电机;直接转矩控制;滑模观测器;无速度传感器【作者】孙振兴;张兴华【作者单位】南京工业大学自动化与电气工程学院,江苏南京210009;南京工业大学自动化与电气工程学院,江苏南京210009【正文语种】中文【中图分类】TM346定子磁链的准确估计是感应电机无速度传感器直接转矩控制获得高性能的关键。
无速度传感器异步电动机直接转矩控制
文 章 编 号 : 0 18 6 ( 0 6 0—0 10 1 0—3 0 20 )504 — 5
无速 度传 感器异步 电动机直接转 矩控制
尚 敬 ,刘 可 安
( 洲 电力 机 车 研究 所 研 发 中心 ,湖 南 株 洲 株 摘 420) 10 1
要 : 析 了速 度 传 感 器 在 机 车 运 行 中故 障 率 较 高 从 而 导 致 牵 引 传 动 控 制 设 备 可 靠 性 降 低 的 现 状 , 绍 了无 分 介
究 。试 验 结 果 表 明 , 系 统 具 有 优 异 的 性 能 。最 后 分 析 了影 响转 速 辨 识 精 度 和 实 际 应 用 的 2个关 键 问 题 : 变 器 该 逆 死 区效 应 及 补偿 方 法 ; 速 再 生 区稳 定运 行 。 低
关 键 词 : 速 度 传 感 器 技 术 ; 步 电动 机 ;直 接 转 矩 控 制 无 异
速 度 传 感 器 技 术 应 用 于 轨 道 牵 引传 动 系 统 的 优 点 。 在 异 步 电 动 机 r型 等 效 电 路 模 型 基 础 上 , 建 L e b re 构 un eg r自 适 应 状 态 观 测 器 , 到 状 态 偏 差 的方 程 。通 过 李 亚 普 诺 夫 稳 定 性 理论 , 导 出一 种 无 速 度 传 感 器 控 制 的 速 度 自适 得 推 应 辨 识 算 法 。在 TMS 2C 1和 T 3 0 2 0构 成 的 双 微 机 控 制平 台 上 , 提 出 的 无 速 度 传 感 器 控 制 算 法 进 行 30 3 MS 2 F 4 对 了全 数 字 化 实现 , 用 大 功 率 I B 利 G T牵 引逆 变 器 和 异 步 牵 引 电动 机 对 无 速 度 传 感 器 直 接 转 矩 控 制 进 行 了试 验 研
无传感器电机控制系统设计与优化
无传感器电机控制系统设计与优化电机是工业生产中常用的设备,通过电能转换为机械能,驱动各种机械设备的运行。
通常情况下,电机控制需要依赖传感器来实时监测电机的运行状态和参数,以达到有效的控制和优化效果。
然而,在某些特殊场景下,由于各种原因,无法使用传感器来实时监测电机运行状态。
本文针对这种情况,介绍无传感器的电机控制系统的设计与优化方法。
在无传感器的电机控制系统中,无法实时获得电机的转速、位置和负载等参数信息。
为了实现对电机的精准控制与优化,需要通过其他手段来获取这些信息或者利用其他替代方案。
下面将分别介绍无传感器电机控制系统的设计和优化方法。
1. 无传感器电机控制系统设计在设计无传感器电机控制系统时,需要考虑以下几个关键因素:1.1 估算电机参数由于无法直接测量,需要推测或估算电机的转速、位置和负载等参数。
其中,电机的参数可以通过电机的技术手册或者实验测量来得到。
转速和位置可以通过模型预测方法、滤波算法或者卡尔曼滤波算法等来估算。
负载可以通过功率测量、电流测量等来估算。
1.2 设计适应性控制策略根据估算的电机参数,设计适应性控制策略来实现对电机的控制。
适应性控制策略可以基于模型预测控制、模糊控制、神经网络控制等方法。
在设计适应性控制策略时,需要考虑系统的稳定性、控制精度和动态响应等因素。
1.3 系统校准与更新由于无传感器电机控制系统中的参数估算存在误差,需要定期进行系统校准和更新。
校准可以基于实验测试或者自适应算法来进行。
更新可以通过在线学习、参数调整等方法来实现。
2. 无传感器电机控制系统优化在设计无传感器电机控制系统的基础上,如何优化电机的控制效果是一个重要的问题。
以下是几种常见的优化方法:2.1 模型参数优化通过对电机模型的参数进行优化,可以达到更准确的控制效果。
优化方法可以基于遗传算法、粒子群算法等进化算法,或者基于优化理论中的最优控制方法。
2.2 控制策略改进针对现有的适应性控制策略,可以通过改进算法或者引入新的控制策略来提高控制效果。
直接转矩控制
4.2.1
5 系统软件设计................................................................ 25
5.1 直接转矩控制的原理.................................................................................... 26
定子磁链观测器....................................................................................................... 27 磁链和转矩的控制................................................................................................... 29 磁链位置的判断....................................................................................................... 31 电压矢量选择表....................................................................................................... 32 5.1.1 5.1.2 5.1.3 5.1.4
1.1 1.2
论........................................................................... 1
无速度传感器变结构直接转矩控制系统的研究
r f r n ea a t e s s e ( RAS eee c d p i y tm M v )me h d Th p r tn h r c e itc n t e l w p e r mp o e u — to. e o e a i g c a a t r is i h o s e d a e i r v d f r s
案 的可 行 性 。
关 键 词 : 接转感 器 直 变
中 图分 类 号 : TM4 4 6 文献 标 识 码 : A
Re e r h o e o ls s a c n S ns re sDTC y tm sBa e n Va i b e Stu t r nto S se s d o ra l r c u eCo r l
摘 要 : 通 用 变 频 器 产 品 开 发 的 角 度 出 发 , 出 了一 种 基 于 变 结 构 控 制 理 论 的 无 速 度 传 感 器 直 接 转 矩 控 从 提 制 系统 方 案 。磁 链 与 转 矩 的控 制 策 略 算 法 简 单 、 不需 要转 速信 息 、 棒 性 强 ; 出 电压 采 用 空 间矢 量 脉宽 调 制 鲁 输 方 式 , 效 地 抑 制 被 控 制 变 量 的 脉 动 ; 于 模 型 参 考 自适 应 方 法 实 现 无 速 度 传 感 器 的转 速 检 测 ; 过 死 区 时 间 有 基 通 补 偿 环 节 进 一 步 提 高 低 速 运 行 特 性 。开 发 完 成 变 频 器 样 机 , 得 了 较 为 理 想 的 实 验 结 果 , 证 了 系 统 设 计 方 获 验
t e y t e d a — i o e s to . A r t t p f c n e t r wa e eo e h rb h e d tme c mp n a in p o o y e o o v re s d v l p d,a d t e e p r n a e u t n h x ei me t lr s ls d mo s r t h fe tv n s n a i iy o h r p s d c n r ls r t g . e n ta e t e e f c ie e s a d v l t ft e p o o e o t o ta e y d
基于MRAS无速度传感器的感应电机直接转矩控制系统研究
Kew rsMR S m dl e rneaat ess m) D C sedsDo es y o d: A ( o e r eec dpi yt f v e T p e— st s e l
[ 中图 分类 号 ]P 7 2 [ 献 标 识 码 】 [ 章 编号 ]0 03 8 (0 70 —0 90 T 23 . 文 A 文 1 0 .8 6 2 0 )60 1 .3
Re e c n Sp e n o ls s arh O e d Se s r s DTC n r l fld c in MoorBa e n e Co to n u t t s d O o o MRAS .
兰州 理 工 大 学 电气 工 程 与 信 息 工 程 学 院 ( 肃 兰 州 7 05 ) 杨 新 华 马 建 立 王关 平 甘 300 ( ol eo l tcl n f r t nE gne n, L T L nhuG nu7 0 5 , hn ) Y n ih a MaJ n WagG nig C lg Ee ra dI o i n i r g U , azo a s 3 0 0 C i e f c i a n ma o ei a agX nu al i i n apn 河 北 工 业大 学信 息工 程 学 院 ( 天津 3 0 0 ) 张 霞 04 1 ( ee U & rt o ehooy inn3 00 , hn ) Z agXa H bi n e i sy fTcn l ,T f 0 4 1C ia g ai hn i
维普资讯
电气 传 动 和 自动 控 制
E e ti ie& Au o l c r Dr c v t ma i n r I t Co to c
《 电气 自动化》o 7年第 2 卷 第 期 2o 9
基于MRAS的异步电机无速度传感器直接转矩控制的开题报告
基于MRAS的异步电机无速度传感器直接转矩控制的开题报告摘要:电力电子技术和数字信号处理技术的发展使得直接转矩控制(DTC)成为现代交流异步电机驱动技术的重要方法之一。
然而,在传统的DTC技术中,需要使用速度传感器进行速度测量和控制,这增加了系统的复杂度和成本。
因此,开发一种无速度传感器直接转矩控制技术是非常必要的。
本文将基于模型参考自适应系统(MRAS)提出一种无速度传感器直接转矩控制方法。
首先,文章介绍了DTC技术的基本原理和传统控制方法存在的问题。
然后,介绍了MRAS技术及其在电机控制中的应用。
接着,提出了基于MRAS的无速度传感器直接转矩控制方法的实现步骤和控制框图,并详细阐述了各模块的功能和实现方法。
最后,通过MATLAB/Simulink仿真分析和实验验证,证明了该方法的实用性和有效性。
关键词:直接转矩控制;无速度传感器;模型参考自适应系统;交流异步电机Abstract:The development of power electronics technology and digital signalprocessing technology has made direct torque control (DTC) animportant method for modern AC asynchronous motor drive technology.However, in traditional DTC technology, a speed sensor is required for speed measurement and control, which increases system complexityand cost. Therefore, it is necessary to develop a direct torque controltechnology without a speed sensor. In this paper, a no-speed sensordirect torque control method based on model reference adaptive system(MRAS) is proposed.First of all, this paper introduces the basic principle of DTCtechnology and the problems of traditional control methods. Then, theapplication of MRAS technology in motor control is introduced. Next, the implementation steps and control diagram of the no-speed sensor directtorque control method based on MRAS are proposed, and the functions and implementation methods of each module are detailed. Finally, the practicality and effectiveness of the proposed method are proved byMATLAB/Simulink simulation analysis and experimental verification.Keywords: direct torque control; no-speed sensor; model referenceadaptive system; AC asynchronous motor。
感应电机无速度传感器直接转矩控制系统的实验研究
华中科技大学文华学院毕业设计(论文)题目:感应电机无速度传感器直接转矩控制系统的实验研究学生姓名:学号:学部(系):专业年级:指导教师:职称或学位:高级工程师2010 年 5 月 28 日目录目录........................................................................................................................... - 2 - 摘要........................................................................................................................... - 3 - 关键词................................................................................................................ - 3 - Abstract ..................................................................................................................... - 3 - Keywords ........................................................................................................... - 5 - 第1章绪论......................................................................................... - 5 -1.1选题目的及意义:...................................................................................... - 5 -1.2.课题发展现状和前景展望....................................................................... - 5 -1.3 研究内容..................................................................................................... - 6 - 第2章感应电机无速度转矩矢量控制原理......................................................... - 7 -2.1 异步电机的数学模型与坐标变换............................................................. - 7 -2.1.1异步电机的基本方程式.................................................................... - 7 -2.1.2 异步电动机的几种等效电路......................................................... - 10 -2.1.3坐标变换........................................................................................ - 13 -2.2 矢量控制变频调速系统的原理............................................................... - 17 -2.2.1 矢量控制基本方程式..................................................................... - 17 -2.2.2 转差型矢量控制............................................................................. - 19 -2.3 无速度传感器矢量控制系统的结构和速度观测原理........................... - 19 -2.3.1 无速度传感器矢量控制系统的原理............................................. - 19 -2.3.2 感应电机矢量控制系统的基本思路............................................. - 20 -2.3.3转子磁链定向的矢量控制系统...................................................... - 20 -2.4 无速度传感器矢量控制技术................................................................... - 21 - 第3章仿真设计................................................................................. - 23 -3.1 仿真平台................................................................................................... - 23 -3.2 仿真准备................................................................................................... - 24 -3.3 仿真电路................................................................................................... - 25 - 第4章仿真结果................................................................................. - 25 -4.1 仿真结果波形........................................................................................... - 25 -4.2 结果分析................................................................................................... - 26 -4.3结论............................................................................................................ - 27 - 第5章总结......................................................................................... - 27 - 参考文献................................................................................................................. - 27 - 致谢......................................................................................................................... - 29 -摘要直接转矩控制技术是继矢量控制技术之后交流传动领域中一种新兴的控制技术,它省去了复杂的矢量变换,具有动态响应快、结构简单、易于实现等优点。
无速度传感器异步电动机直接转矩控制的研究的开题报告

无速度传感器异步电动机直接转矩控制的研究的开题报告一、研究背景传统的电机驱动控制方法,需要使用速度传感器来检测电机的转速,这样才能传递给控制器进行闭环控制。
而传感器的安装和维护成本较高,同时也可能因为传感器故障影响整个系统的运行稳定性。
因此,开发一种无速度传感器控制异步电动机的直接转矩控制方法具有实际应用价值。
二、研究目的本研究旨在探索异步电动机无速度传感器直接转矩控制方法,为电动机驱动系统的研究和应用提供更加简便、稳定的控制方案。
三、研究内容和组织结构本研究将从以下两个方面展开:1.无速度传感器直接转矩控制的原理及实现方法的研究通过无速度传感器的技术手段,直接控制电机的电流和电压,从而实现对电机的转矩控制。
针对不同的工况和负载,设计相应的控制算法和策略,以提高电机的扭矩精度和系统的稳定性。
2.实验验证及性能分析采用无速度传感器直接转矩控制方案,通过实验测试并分析其控制效果和性能。
同时,与传统速度传感器闭环控制进行对比,验证所提出的控制方案的优越性和可行性。
组织结构安排如下:第一章绪论1.1 研究背景1.2 研究目的1.3 研究内容与组织结构第二章无速度传感器直接转矩控制的原理及实现方法的研究2.1 无速度传感器直接转矩控制技术原理2.2 系统硬件设计2.3 控制算法设计第三章实验验证及性能分析3.1 实验介绍3.2 实验数据及分析3.3 性能指标评价第四章结论与展望4.1 结论4.2 展望参考文献四、预期研究成果通过本研究,预期可以得到以下相关成果:1.提出一种无速度传感器直接转矩控制的方案,能够在不增加传感器成本和系统复杂度的情况下,提供一种更加稳定、精确的电动机转矩控制方法。
2.设计实验验证方案,通过实验分析,验证所提出的控制方案的优越性和可行性,得到相应控制效果和性能指标。
3.相关技术手段和算法的研究,为进一步推广和应用该控制方案提供一定的技术支持。
无速度传感器永磁同步电机直接转矩控制的研究_图文.
江苏大学
硕士学位论文
无速度传感器永磁同步电机直接转矩控制的研究姓名:乔薇
申请学位级别:硕士
专业:电力电子与电力传动
指导教师:刘贤兴
20070614
江苏大学硕士学位论文
图3.9观测的磁链波形图3.10a相电流波形
图3.1l估算速度波形图3.12实际速度波形
3.4本章小结
本文着重分析和探讨了两种无速度传感器实现永磁同步电机直接转矩控制的方法。
一是扩展的卡尔曼滤波器实现的PMSM DTC,二是基于模型参考自适应的方法,分别给出了两种方法的理论研究模型,并将他们应用于PMSM的直接转矩控制的计算中,仿真结果表明两种方法都能有效的估算出转子的位置和速度,达到预期的目的。
基于滑模观测器的感应电机无速度传感器直接转矩控制

+
一
A=吉 Jc, 一( ) t + +- , ,
:
R r
寿 一 。 RB = : -I ,
【0 _ 】
取
c-
c( e I I f I l I 洒 + B ) eB
() 9
J【 =
式中,
, B d p轴定 子磁链 分量 ;。,B 仅 B 为 — i i 为 - 。
测器 中反 馈矩 阵增 益 系数对 观测 器 的收敛 速度 影 响
动; 而磁链 幅值 的观测误 差 , 可导 致 电机 的负载 能力
降低 , 响动态 响 应 或 使 电 机处 于磁 饱 和 。 由 于感 影 应 电机在 运行 中存 在 着 电机 参 数 变 化 , 信号 检测 误 差 和逆变 器死 区等 非线 性 因素 , 响磁链 观测 精度 。 影 因此 要求 定子 磁链 观测 器具 有强 鲁棒 性 … 。 目前 , 接转 矩 控 制 系统 中常 用 的定 子 磁链 观 直 测器 是 电压 积 分 磁 链 观 测 器 ( 电压 模 型 ) 。其 实 现 简单 , 测值 仅与 定子 电阻有关 , 电机转 子参 数依 观 对
张 兴 华 ( 93 ) 男 ,广东 籍 , 授 ,博 士 , 究 方 向 为 电力 传 动控 制 、 杂 系 统 控 制 。 16 一 , 教 研 复
3 0
电 工 电 能 新 技 术
第3 1卷
耗, 三相绕 组对 称 、 匀 , 均 绕组 中感 应 电势波 形 为 正 弦 波 的条 件 下 , 两 相 静 止 — 在 B坐 标 系 中 , 以定 子 电流和定 子磁 链为 状态 变量 的感应 电机方 程为 :
( 5 1)
工 ^
基于智能算法的无速度传感器直接转矩控制系统的设计
基于智能算法的无速度传感器直接转矩控制系统的设计
李彬;樊立萍
【期刊名称】《沈阳化工大学学报》
【年(卷),期】2007(021)004
【摘要】为了改善定子电阻对定子磁链的影响以及电机的低速性能,提出一种利用模糊神经网络来构造定子磁链观测器的方法.传统的交流调速系统都带有速度传感器,难以维护.针对这一问题,提出一种利用递归神经网络构造电机转速辨识器的方法,并且利用遗传算法对转速辨识器进行优化.通过Matlab仿真实验,表明递归神经网络速度辨识器具有快速的跟踪效果和良好的辨识精度,并且基于模糊神经网络的磁链观测器有效地改善了直接转矩控制系统的低速性能.
【总页数】7页(P303-309)
【作者】李彬;樊立萍
【作者单位】沈阳化工学院,信息工程学院,辽宁,沈阳,110142;沈阳化工学院,信息工程学院,辽宁,沈阳,110142
【正文语种】中文
【中图分类】TP183
【相关文献】
1.基于无速度传感器的直接转矩控制系统优化 [J], 李奔;王德军
2.基于DSP无速度传感器直接转矩控制系统的设计 [J], 颜渐德;刘国荣
3.无速度传感器直接转矩控制系统设计 [J], 罗小丽;范桂林;庞庆;蒋云峰
4.基于DSP的无速度传感器直接转矩控制系统设计 [J], 刘青川;张福生
5.基于无速度传感器直接转矩控制系统研究 [J], 孙旭霞; 孟琳; 王凯; 刘一栋
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
直 接 转 矩 控 制 ( i c T ru ot l D C) D r t oq e C nr , T e o
高 , 需要 大量 离线 训 练 。本 文 在 综 合 考 虑 D C 且 T 系统 性 能要 求 后 , 设计 了在 线 自整 定模 糊 神经 P I 控制 器 , 实现 了对 感应 电机 D C低 速 时 系统 性 能 T 的改 善 。
I t li e n e l nt Optm i a i n sg f I uc i n M o o r c g i z to De i n o nd to t r Di e t To qu n r lwiho p e n o l s r e Co t o t ut S e d Se s re s
c y,sai ha a t rsi . Sm u ain e ulss we ha n elg n pi z to e i n ma e r c o q o r ls s ttc c r ce itc i lto r s t ho d t tit lie to tmiai n d sg k sdie ttr ue c nto y — tm bvo l mpr v d p ro ma c e a o iusy i o e e fr n e, b te o u t s nd sl- d p ie et rr b sne sa efa a tv .
其 中: y为实 际转 速输 出 ,, 期望 转 速输 出。 l为 那 么误 差信 号将 由第 四层 向第 一层 一 次反传 。
( )解 模糊 层 : 1
=
o , 6l
= l 一y= e ,
() 6
=
警=
=
( 7 )
图 2 F N P 控制框 图 N —I
e = ・ ,Biblioteka = n£ y e () 3 此 层共 有 4 9个 节点 。 ( )解模 糊 化层 : 4
图 1 D C原 理 框 图 T
∑ i , nt O ̄ = e )i j 4 Y j 4
i 1 =
L, () 4
2 模 糊神经 网络 一 I 节器 P调
从 降低 系统成 本 , 需安 装 的角 度 出发 , 速 无 无
由于其结 构 简单 、 系统 动态 响应 速度 快等 特点 , 被
广泛 应用 在 交 流 调 速 系统 中 。传 统 D C 系统 都 T
是采 用 P 控 制器进 行 转速 调节 的 , I 该算 法 具 有简 单方便 、 可靠 性高 等优 点 , 却 需要 大量 试验 反复 但 调 速 , 且得 到 的参数 也 比较粗 糙 , 而 容易 引发 系统 在低 速运 行 时控 制精 度欠 缺 、 矩脉 动大 的问题 。 转 基 于模 糊 控 制 的 D C方 法 , 模 糊 自适 应 P 调 T 用 I 节器 代替 常规 P 调节 器 J可 以抑 制 转 矩 脉 动 , I ,
f
然后 用 B 法 来 修 正 F N 的 可 调 参 数 , P N
( :1 2 8 ,n 和 ( =1 2 =1 2 Z ,…9 ) / i ,, , …7 。 )
定 义指 标 函数 为
优化 , 其结构图如图 2所示 。
E= (—, =1 ÷ y l 了 ) e
( 5 )
其 中 :=123 … ,9 i , ,, 4 。
( )规则 层 : 2
在 F N模 块 中 , 和 分 别 为 实 际转 速 与 N 给 定转 速 之 间 的误差 A , 其 变 化 率 d n &, n及 a / 这
=
舞 ・ ( 8 )
—a E a , ,
— —_ ———
迫 札 与控 制 应 用 21, 1 ) 01 8(2 3
控制与应用技术 E 帅强
感 应 电 机 无 速 度 传 感 器 直 接 转 矩 控 制 的 智 能 优 化 设 计
王 宝忠 , 要 丹 , 孙 健涛 ( 苏科技 大学 , 苏 镇 江 江 江
摘
22 0 ) 1 0 3
要 : 一些 特定作业环境 中, 要对 电机转速进行精确调控 。为 了改善直 接转 矩控 制系统低 速时常 在 需
速 变化 。感 应 电机 D C原 理 图如 图 1所示 。 T
y :。p 删 2 , ( )
() 2
(i Jj
其 中 ,t r 和 分 别 是 第 i 输 入 变 量 的 第 r 个
个 模糊 集 合 的高斯 型 函数 的隶 属 函数 的均值 和 标
准差 , 们 都 是 F N 的 可 调 参 数 。 此 层 共 有 1 它 N 4 个节 点 。 ( )规 则层 : 3
规 P 调节器带来 的转 速脉动 , I 设计 了基 于模糊 神经 网络 的新 型 P 调 节器 , I 改进后 的转 速调节器 具有快 速 自 整定 、 超调的特性 。针对 MA S转速观测器低速时 的不稳定性 , 微 R 设计 了基于人 工神经 网络的模型参 考 自适 应速度观测器 , 改进后的转速观测器具有 良好 的动 、 静态特性 。仿真结果表 明 : 智能优化设计使得直接转矩控 制系统的控制效果 明显提高 , 且有更好 的鲁棒性 和 自适应 性。
Abs r t n s me s e ilwo kig e v r me ,t e s e fmo o h u d bec n r le a c aey. I r rt t ac :I o p c a r n n ion nt h pe d o t rs o l o told c urt l n ode o r d c n oo p e i l us d by g n r lr g l tro ie ttr e c n rls se i o s e d,a n w e u a e u i g r trs e d rpp eca e e e a e u ao fd r c oqu o to y tm n lw p e e PIr g l ・
凡e
2
: ,
() 1
其 中 , 就是 F N的第 i 输入 ,=12 N 个 i ,。此
给定值 进 行 滞环 比较 , 后 经 由开关 状 态 表选 择 然 出合 适 的空 间 电压 矢 量 作 用 于逆 变 器 , 过 逆 变 通 器 开关 的不 断切 换 , 现 电机转 矩 、 实 磁链 按要 求 快
度传 感器 成 为 了当今 的研 究 热 点 。其 中 , 为 常 最 见 的是 MA S 速 辨识 法 J 而该 方 法 在 低 速 时 R 转 , 性 能不稳 定 , 这里 设 计 了基 于 双层 线 性 神 经 网 故 络的 M R A S速度 辨 识器 。
利用 MA L B2 0 b Sm l k提供 的模 块建 T A 0 9 / i ui n
t rb s d o u z e r ln t r a e in d, n h d f d s e d r g ltr h sf s s r r g lt g o a e n f zy n u a ewo k w sd sg e a d t e mo i e p e e u ao a a t e -e u ai ,mir v r i f n coo e mo u a in c a a t r t .Ai n ti r vn h t bl y o d lt h r ce i i o sc mig a mp o ig t e sa i t fMARS s e d o s r e o p e ,a mo e ee e c i p e b e v ri l w s e d d lrf r n e n s e d a a t e o s r e a e n a t c a n u a n t o k wa e in d n h d f d o s r e a o d t n e — p e — d p i b e v rb s d o ri il e r l ew r sd s e ,a d t e mo i e b e v r h sg o e d n v i f g i
控制 与应用技术 E C MA
迫 币 与楦 芾J 田 21, 1 ) 乙 应 0] 8(2 3
1 D C 原 理 T
D C_ 是 采 用 定 子 磁 链 定 向 和 空 问 矢 量 概 T l
输入, 表示第k 第 y Y 层的 个节点的输出, Y 即y =
删 , F N各 层 的处 理过 程 可表示 如 下 。 则 N
W NG B oz o g, A a —h n 0 Da S N in to n, U Ja — a
(i guU ie i f c nea dT cn l y h ni g 0 3 hn ) J n s nvr t o i c n eh oo ,Z e j n 1 0 ,C ia a sy S e g a 2 2
里为 和 在模糊论域 { 6 一 , 2 0 2 4 一 , 4 一 ,,,, 6 上各 定义 7个模 糊 集 合 , 有 4 } 共 9条 规 则 , 入 输
( )输入 层 : 1
念 , 过检 测 定 子 电压 、 通 电流 , 接 在 静 止 坐 标 系 直
下观 测 电机 的磁 链 、 转矩 , 将 此观 测值 与 相应 的 并
n) √ i , n) e = =, = e t y t 1
层 有两 个 节点 。 ( )隶属 函数层 : 2
关 键 词 :感 应 电机 :直 接 转 矩 控 制 ;智 能控 制 ;自适 应 调 节 器 ; 速 度 传 感 器 无 中图 分 类 号 :T 0 . : M 3 6 文 献 标 志 码 : 文 章 编 号 :6 36 4 (0 1 1 -0 70 M 3 12 T 4 A 17 - 0 2 1 )2 2 -5 5 0
立仿 真平 台 , 感 应 电机 D C系 统 进 行 了研 究 , 对 T 并将 智 能优化 后 的 D C系 统 与传 统 D C系 统进 T T 行 比较 , 验证 了智 能算法 的有 效性 。